GNSS Underground Coverage for Tunnels, Stations, Car Parks, Bus Stations and Airports in the U.K.
Syntony GNSS and Chronos Technology have formed a partnership to deliver underground GNSS positioning, navigation and timing (PNT) solutions for critical infrastructure applications in the United Kingdom.
Syntony GNSS is a leader and expert in the design and manufacture of GNSS systems, and Chronos Technology is a resilient GNSS system integrator.
GNSS coverage has become fundamental to many services from emergency services to asset tracking for example. Yet when entering an underground area such as a metro/subway, tunnel, car park, airport, or bus station for example, the GNSS signal is lost.
Syntony’s SubWAVE solution expands the GNSS coverage to underground areas, enabling the localization of any equipment with a standard GNSS chipset. Examples include standard smartphones and the TETRA Emergency Services Network handset used for security and services. Security and services applications include locating emergency calls, keeping track of staff, locating faults in tunnels, managing assets, locating trains and providing guidance.
A Syntony team member in a Swedish road tunnel during SubWAVE testing shows the positioning in an underground environment on a smartphone. (Photo: Syntony GNSS)
By emitting a perfect emulation of the “real” GNSS signal, SubWAVE offers underground operators, their staff, emergency services and the general public the benefit of full GNSS coverage in all underground areas for both operational and safety reasons.
One fundamental aspect is the user only needs a standard GNSS receiver (a smartphone or TETRA radio) — no new handsets, receivers or apps are required. The system operates by broadcasting synthetic location specific GNSS signals through existing or new leaky feeder cables in the tunnels.
Accuracy levels vary with leaky feeder and system complexity options; however, 2-meter accuracy is possible with a standard smartphone. The system is widely installed in the Stockholm metro and is in active trials throughout Europe and America.
“We are pleased to form a partnership with GNSS specialists Chronos,” said Joel Korsakissok, president of Syntony GNSS. “Their knowledge and experience, together with their dedicated installation, commissioning and support teams complement our sophisticated solutions.”
“Since its first general availability, one of the well-known shortcomings of the GPS system was lack of indoor or underground coverage,” said Charles Curry, managing director with Chronos. “Many have tried to solve this with various technologies over the years. Syntony’s innovative technology offers underground GNSS coverage for PNT applications. We are very excited by the possibilities and pleased to be partnering with them to offer their solution for critical infrastructure applications in the UK.”
In addition, Chronos will also supply Syntony’s sophisticated GNSS simulators used in the aerospace and defence industries for product testing.
By R. Eric Phelts, Kazuma Gunning, Juan Blanch and Todd Walter
Innovation Insights with Richard Langley
AS WE NOTED IN THE LAST INNOVATION COLUMN, integrity — at least from a safety viewpoint — is the most important characteristic of a navigation system. Yes, accuracy, availability and continuity are also required but, without integrity, the advertised accuracy of a system might become meaningless and perhaps misleading. While GPS and user receivers are highly reliable, we cannot presume that there will never be an erroneous signal transmitted by a GPS satellite that would result in a receiver outputting a hazardously misleading position solution. While “supervisory” systems such as satellite-based augmentation systems monitor GPS signals and can alert users about defective satellites within a very short period of time, it is advantageous for a user receiver to autonomously detect problematic satellites and quarantine them so that they do not perturb the position solution.
It is for this reason that receiver autonomous integrity monitoring (RAIM) techniques were developed. As we know, a receiver needs signals from a minimum of four satellites simultaneously to determine its 3D position and its clock offset. However, typically there are more than four satellites in view, and so multiple solutions using subsets of four satellites are possible. If five satellites are visible, then it is possible to determine that one of them is faulty, but not which one (geometry plays a role here). This is called fault detection (FD). And if six satellites are visible, the faulty satellite can be determined and then excluded from the position solution (fault detection and exclusion, or FDE). This is the basic principle of RAIM.
Advanced RAIM (ARAIM) extends RAIM to other constellations beyond GPS. ARAIM enables the use of the newer GNSS constellations to provide better levels of performance than RAIM with GPS alone. It also uses dual-frequency measurements for enhanced vertical positioning reliability.
Central to positioning techniques providing a safety-of-life service is the notion that the uncertainty of a provided position must be conservatively estimated and provide for both nominal uncertainty and the uncertainty of a faulted solution such as that detected using RAIM. These conservative estimates are known as the horizontal and vertical protection levels. The horizontal protection level (HPL) is the radius of a circle in the horizontal plane with its center at the true position, which describes the region that is assured to contain or bound the provided horizontal position to a very high probability. The vertical protection level is half the length of a segment in the vertical direction with its center at the true position, which describes the region that is assured to contain or bound the provided vertical position to a very high probability. The probability levels are typically taken to be 99.9999998 and 99.99999% for HPL and VPL, respectively.
The usual approach for RAIM and ARAIM is to use the so-called “snapshot” approach, where measurements are assumed to be uncorrelated epoch to epoch. In this month’s column, a team of authors from Stanford University discusses a superior approach for ARAIM using the technique of precise point positioning.
Advanced Receiver Autonomous Integrity Monitoring (ARAIM) is implemented using solution separation in positioning and navigation software. Solution separation computations presume one or more GNSS satellites may be faulty, and they iteratively compute multiple position solutions comprised of subsets of the n satellites in view (n, n-1, n-2, and so on) to ensure that at least one of the solutions is fault-free. Using assumptions on the nominal and faulted uncertainty of the solutions, the software can compute conservative horizontal and vertical protection levels (PLs) by bounding the uncertainty from all the solutions. This assures (to a targeted level of probability) that the user position is contained within these limits.
Traditional solution separation techniques generally operate as a “snapshot.” The basic measurements are dual-frequency, carrier-smoothed pseudorange (code), and errors are generally assumed to be uncorrelated from epoch to epoch. This procedure requires that errors at each time step are conservatively bounded with large uncertainties (sigmas) designed to protect the user against the worst-case error. These assumptions minimize the complexity and computational cost of the solution by providing a robust, provably safe bound. However, the PLs computed are relatively large. In addition, they can change suddenly from one epoch to the next due to changes in available satellites or platform dynamics. This can make meeting performance goals (such as continuity) for aircraft approaches more challenging.
Solution separation procedures using techniques based on precise point positioning (PPP) implement an extended Kalman filter (EKF) to filter measurements over time. In this case, the basic measurements are dual-frequency code and carrier phase, and errors are assumed to have some correlation between each time step to the next. Accordingly, these techniques leverage higher quality measurements (that is, carrier-phase-based as opposed to code-based) to smooth and reduce large sigmas and to estimate (and calibrate) errors over time. The complexity associated with defining and characterizing the decorrelation models for the errors, so that the nominal covariance produced by the EKF conservatively describes the actual error, is significant. Also, the computational cost of estimating the error states may be substantially higher than with the traditional snapshot approach. However, the computed protection levels provide integrity and are often significantly smaller. In addition, the filtering makes them more robust to platform dynamics, which makes them well-suited for aircraft in flight.
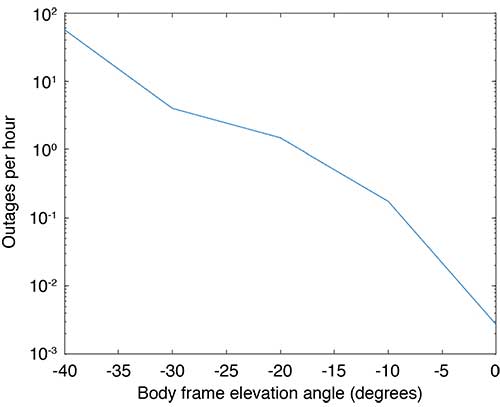
Flight Data: Outages and Cycle Slips. ARAIM performance may be significantly affected by aircraft dynamics. Specifically, banking can induce satellite outages and cycle slips. Outages weaken the constellation geometry and can cause sudden changes in the protection level. Frequent cycle slips prevent code measurements from being smoothed, potentially inflating protection levels of carrier-phase-smoothed code measurements for extended periods of time.
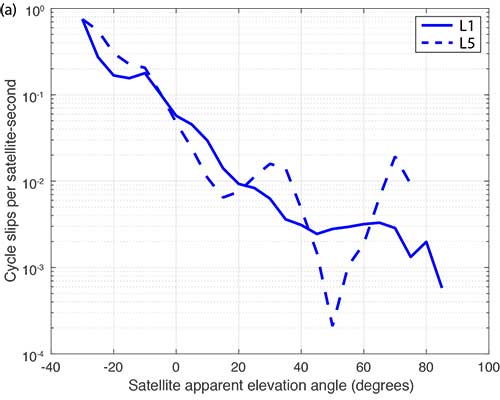
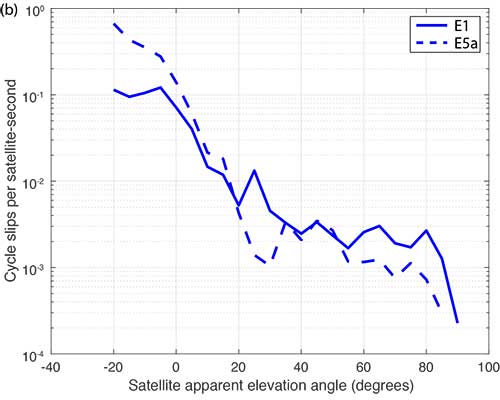
When the outages and cycle slips are computed as a rate, a trend can be seen. Both increase notably as the relative elevation angle to the satellites decrease. FIGURE 1 shows an example of outages as a function of the apparent elevation angle of the satellites (relative to the aircraft). Cycle slips on GPS L1-L5 and Galileo El-E5a are plotted in FIGURES 2 (a) and (b), respectively.
FIGURE 1. Outages as a function of body frame or apparent elevation angle during aircraft banking. (Image: Authors)FIGURE 2a. Cycle-slip rate (per satellite-second) for GPS L1-L5. (Image: Authors)FIGURE 2b. Cycle-slip rate (per satellite-second) for E1-E5a. (Image: Authors)
For this article, we have used the flight data from one of our earlier papers on the effect of aircraft banking on ARAIM performance (see Further Reading). With this data, we show that significant advantages of PPP can be retained even during aircraft maneuvers when outages and cycle slips threaten ARAIM continuity and availability the most.
MODEL ASSUMPTIONS
The traditional snapshot solution separation approach is well-established and was implemented according to the standards established by a working group operating under the U.S.-European Union Agreement on GPS-Galileo Cooperation, which has been extended to all constellations (see Further Reading). For this article, we limited the constellations to GPS and Galileo, and the prior probabilities assumed for satellite and constellation faults were as follows:
Psat = 10-5, Pconst,GPS = 10-8 and Pconst,GAL = 10-4
We implemented the PPP algorithm with solution separation using an EKF using dual-frequency code and carrier-phase measurements (from GPS and Galileo) with estimated parameters comprising the receiver position and velocity, clock biases for each constellation in use, a residual tropospheric delay, carrier-phase float ambiguities for each tracked carrier, multipath error, receiver differential code bias, and broadcast orbit and clock error. Modeled (not estimated) effects include solid Earth tide modeling, ocean loading, an initial tropospheric delay and relativistic effects. Many of the details of the implementation can be found in our paper “Design and Evaluation of Integrity Algorithms for PPP in Kinematic Applications” (see Further Reading).
PPP techniques typically utilize precise ephemeris information obtained from a global network of ground reference stations such as those operating in the network coordinated by the International GNSS Service. Snapshot solution separation techniques, however, use only ephemeris information broadcast from the satellites themselves. For a proper comparison of the protection levels computed by each technique, the PPP filter was constrained to use this broadcast information.
The model we have applied is mostly typical of a traditional PPP implementation with one significant exception — the state tracking the error contribution of the broadcast orbit and clock on each line-of-sight signal. The error contributed by the broadcast orbit and clock is handled by the filter leveraging a characterization of the rate of change of the error, then including it as an estimation state for each line of sight and only adding enough process noise to capture the slowly changing error. We have previously characterized the rate of change of the error in the broadcast orbit and clock and process noise (for GPS). Complete tables of initial state uncertainties and additional settings for process and measurement noise were provided in our earlier work (see Further Reading).
RESULTS
Flight data collected over a period of approximately one year was used to evaluate ARAIM performance through momentary outages and cycle slips due to aircraft dynamics. A multi-constellation, multi-frequency receiver tracked GPS (L1 C/A and L5) and Galileo (E1 and E5a) satellites. This receiver is installed in a Global 5000 jet owned and operated by the FAA William J. Hughes Technical Center. It records and stores GNSS measurements whenever flights are taken. The data we used for this article included data recorded over approximately 35 flights from September 2017 to April 2018.
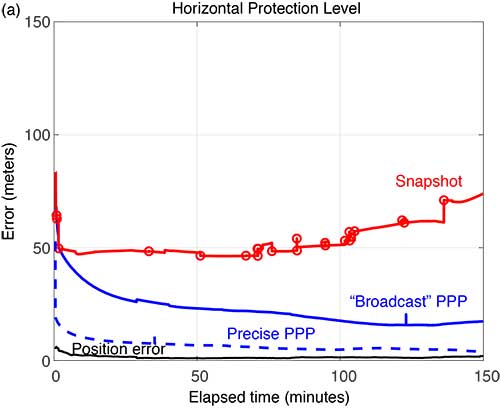
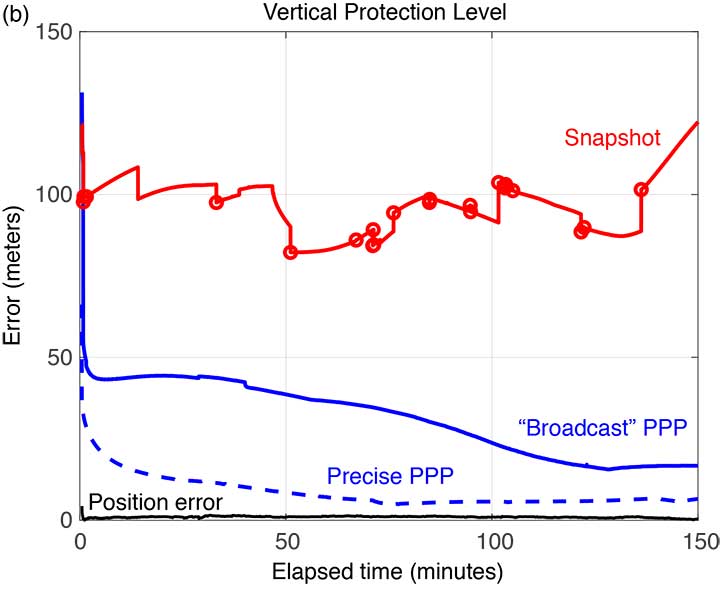
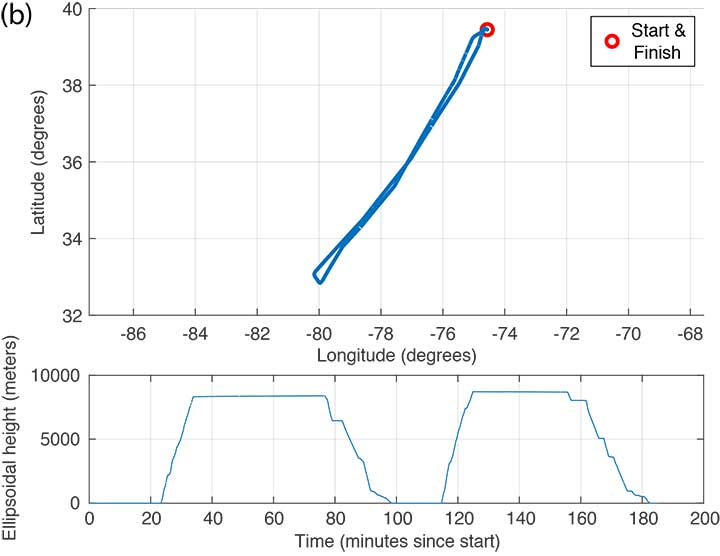
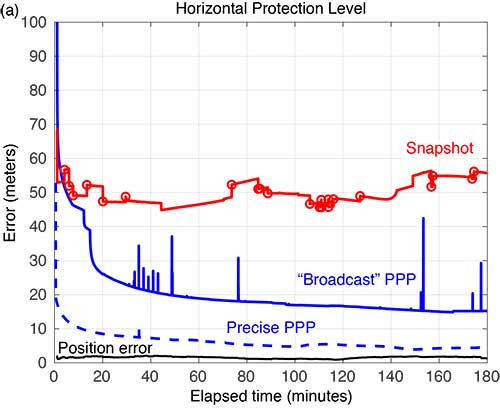
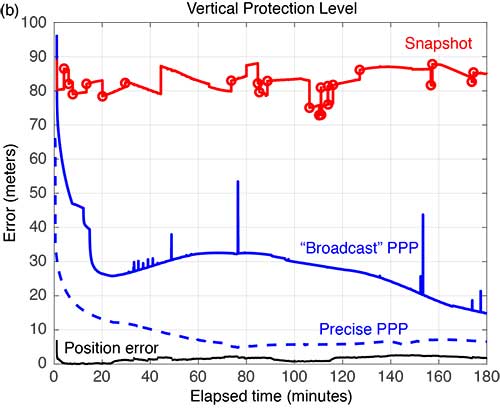
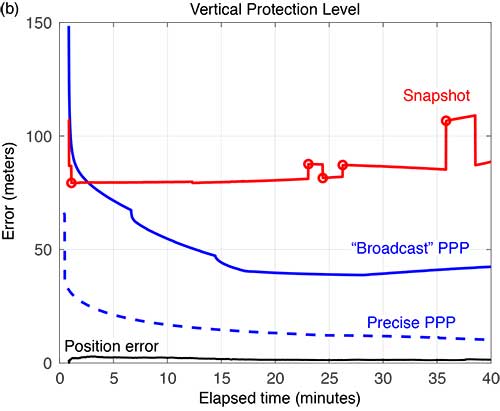
FIGURE 3 shows the trajectory and altitude information corresponding to a single flight (Flight #6) taken on Sept. 20, 2017, and FIGURE 4 compares the corresponding horizontal and vertical protection levels computed using snapshot and “broadcast” PPP techniques. For an additional reference, we also computed protection levels using PPP with precise orbits and clocks (we call this precise PPP despite the terminology redundancy) and plotted these in Figure 4, too.
FIGURE 3b. Altitude information for Flight #6 (Sept. 20, 2017). (Image: Authors)FIGURE 4a. Horizontal protection levels for Flight #6 (Sept. 20, 2017); red circles indicate a satellite being dropped or reentering the solution. (Image: Authors)FIGURE 4b. Vertical protection levels for Flight #6 (Sept. 20, 2017); red circles indicate a satellite being dropped or reentering the solution. (Image: Authors)
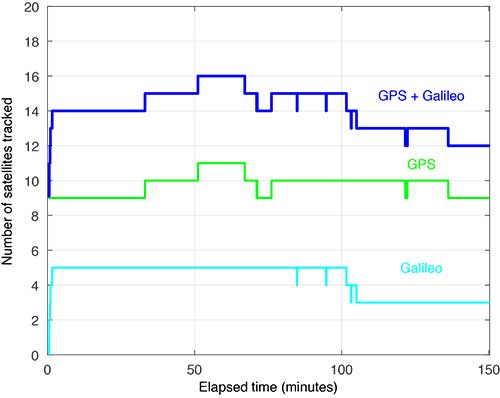
Several things are readily apparent from these comparisons. First, after the initial time required for convergence, there is a substantial reduction in the PLs using the broadcast-PPP-based approach. The precise PPP PLs, as expected, produce the largest reduction, but use additional information not available to the snapshot method. In addition, the snapshot solution separation PLs vary significantly due to cycle slips and momentary satellite outages. FIGURE 5 shows the number of satellites tracked by the receiver during this flight; red circles plotted on the snapshot protection-level line indicate when satellites are coming into and out of view. Despite numerous abrupt changes in number of measurements and measurement quality, the EKF of the PPP techniques produces PLs that are relatively smooth and continuous.
FIGURE 5. Number of satellites tracked for Flight #6 (Sept. 20, 2017). (Image: Authors)
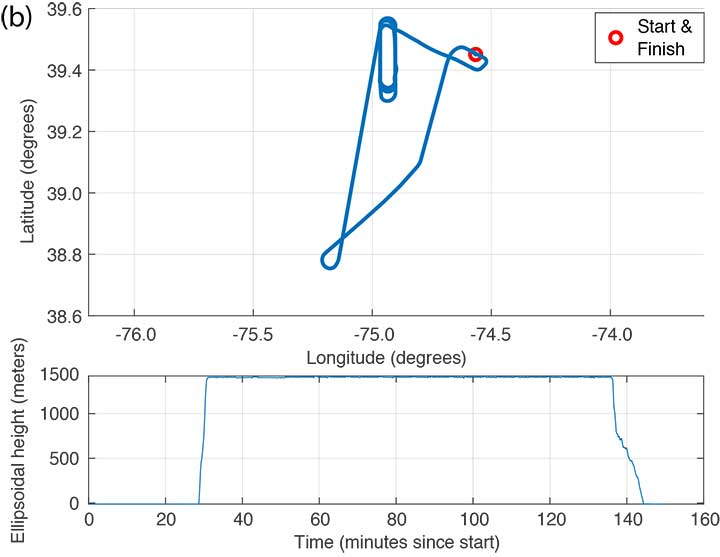
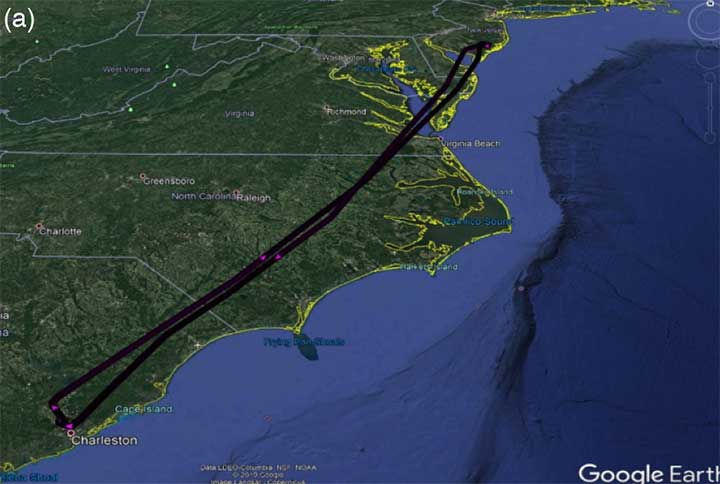
FIGURE 6 shows the trajectory and altitude information corresponding to Flight #4 taken on Sept. 15, 2017.
FIGURE 6a. Flight path for Flight #4 (Sept. 20, 2017). (Image: Authors)FIGURE 6b. Altitude information for Flight #4 (Sept. 20, 2017). (Image: Authors)
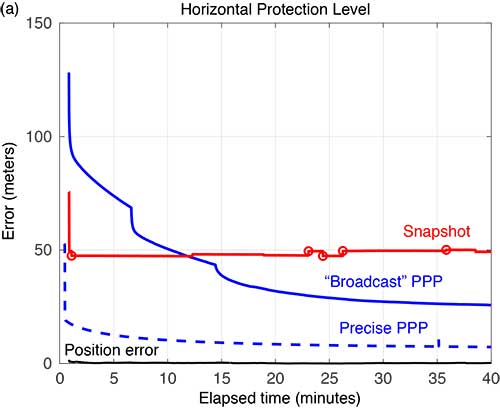
FIGURE 7 compares the horizontal and vertical PLs for snapshot solution separation and the PPP-based techniques.
FIGURE 7. Horizontal protection levels for Flight #4 (Sept. 15, 2017); red circles indicate a satellite being dropped or reentering the solution. (Image: Authors)FIGURE 7b. Vertical protection levels for Flight #4 (Sept. 15, 2017); red circles indicate a satellite being dropped or reentering the solution.
As in the case shown in Figure 4, the PLs in Figure 7 reveal a substantial reduction in the mean PLs computed using the PPP-based approach. And the snapshot solution separation approach displays even more variations due to momentary satellite outages. Some of the cycle slips affected enough satellites to introduce brief spikes in the PPP solution as well. These reconverge quickly, but they suggest that some tuning of the EKF can still be done to mitigate these interruptions. Still, the filtered approach produces PLs that are more robust to the outages and are substantially smaller than with the snapshot method.
FIGURE 8 compares the horizontal and vertical PLs computed using snapshot solution separation and PPP techniques for Flight #20 — where the airplane remained stationary on the runway. In the absence of flight dynamics, the levels for all the approaches were relatively smooth. However, a few discontinuities can still be observed for the snapshot case. Also note, in the case of the broadcast PPP, the convergence time is noticeably longer. This is likely because the integer ambiguity resolution in the solution took longer to converge without platform motion.
FIGURE 8a. Horizonta protection levels for a stationary aircraft (Flight #20, Dec. 4, 2017); red circles indicate a satellite being dropped or reentering the solution. (Image: Authors)FIGURE 8b. Vertical protection levels for a stationary aircraft (Flight #20, Dec. 4, 2017); red circles indicate a satellite being dropped or reentering the solution. (Image: Authors)
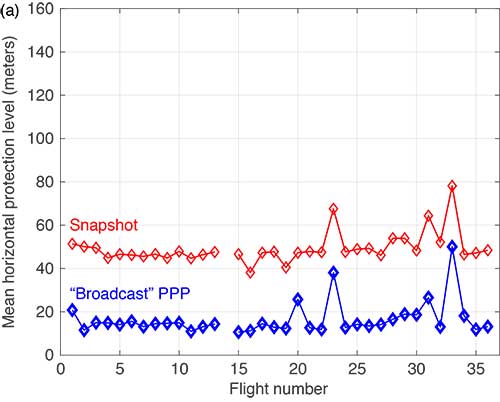
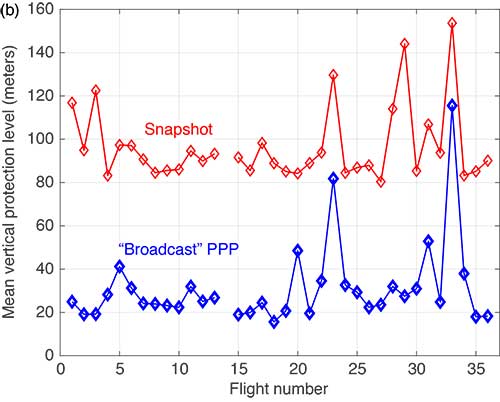
The mean horizontal and vertical PLs for both techniques are summarized in FIGURE 9. (There were issues with the data from Flight #14 and it was not processed.) The PPP approach consistently produces protection levels anywhere from 30 to 75% smaller than those computed using the snapshot approach. The mean PLs for the PPP techniques were always below those computed with the snapshot method.
FIGURE 9a. Comparison of mean horizontal PLs for “snapshot” vs. a PPP-based technique. (Image: Authors)FIGURE 9b. Comparison of mean vertical PLs for “snapshot” vs. a PPP-based technique. (Image: Authors)
CONCLUSIONS
Data from 35 flights was used to compare ARAIM protection levels computed by the traditional “snapshot” solution separation versus a PPP-based approach during both in-flight and several static scenarios. We observed that the filtering of PPP methods yields mean PLs approximately 30 to 75% of those computed using traditional methods in all cases. This improvement can be attributed to exploiting — through filtering and estimation — carrier-phase-based measurements and a time-correlation of the errors. In addition, the EKF employed by the PPP approach demonstrated improved robustness to outages and cycle slips induced by aircraft dynamics. Despite the increased complexity and computational cost, we believe that PPP approaches hold promise for significantly improving ARAIM performance.
ACKNOWLEDGMENT
This article is based on the paper “Evaluating the Application of PPP Techniques to ARAIM Using Flight Data” presented at ION ITM 2020, the 2020 International Technical Meeting of The Institute of Navigation, San Diego, California, Jan. 21–25, 2020.
MANUFACTURER
The flight data was recorded using a Trimble BX935-INS receiver fed by an Antcom Avionic II GNSS antenna.
R. ERIC PHELTS is a research associate in the Department of Aeronautics and Astronautics at Stanford University, California. He received a Ph.D. in mechanical engineering from Stanford University in 2001. His research involves signal deformation monitoring for SBAS and flight-data analyses for ARAIM.
KAZUMA (KAZ) GUNNING is a Ph.D. candidate in the GPS Laboratory at Stanford University working under the guidance of Todd Walter. He is also the navigation algorithms and architecture lead at Xona Space Systems in San Mateo, California. His research interests are in precise point positioning and integrity.
JUAN BLANCH is a senior research engineer at Stanford University, where he works on integrity monitoring algorithms for radionavigation. He received a Ph.D. in aeronautics and astronautics from Stanford University in 2003. He has received The Institute of Navigation (ION) Parkinson and Early Achievement awards.
TODD WALTER is a research professor in the Department of Aeronautics and Astronautics at Stanford University. He received his Ph.D. in applied physics from Stanford University in 1993. His research focuses on implementing high-integrity air navigation systems. He has received the ION Thurlow and Johannes Kepler awards. Walter is also a Fellow of the ION and has served as its president.
“A Baseline RAIM Scheme and a Note on the Equivalence of Three RAIM Methods” by R.G. Brown in Navigation, Vol. 39, No. 3, Fall 1992, pp. 301–316.
Advanced Receiver Autonomous Integrity Monitoring
“SBAS Corrections for PPP Integrity with Solution Separation” by K. Gunning, J. Blanch and T. in Proceedings of ITM 2019, the 2019 International Technical Meeting of The Institute of Navigation, Reston, Virginia, Jan. 28–31, 2019, pp. 707–719.
“Design and Evaluation of Integrity Algorithms for PPP in Kinematic Applications” by K. Gunning, J. Blanch, T. Walter, L. de Groot and L. Norman in Proceedings of ION GNSS+ 2018, the 31st International Technical Meeting of the Satellite Division of The Institute of Navigation, Miami, Florida, Sept. 24–28, 2018, pp. 1910–1939.
“Effect of Aircraft Banking on ARAIM Performance” by R.E. Phelts, J. Blanch, K. Gunning, T. Walter and P. Enge in Proceedings of ION GNSS+ 2018, the 31st International Technical Meeting of the Satellite Division of The Institute of Navigation, Miami, Florida, Sept. 24–28, 2018, pp. 2632–2641.
“Precise Point Positioning” by J. Kouba, F. Lahaye and P. Tétreault, Chapter 25 in Springer Handbook of Global Navigation Satellite Systems, edited by P.J.G. Teunissen and O. Montenbruck, published by Springer International Publishing AG, Cham, Switzerland, 2017.
The United States Space Force’s GPS III program reached another milestone with the successful core mate of GPS III Space Vehicle 08 at Lockheed Martin’s GPS III Processing Facility in Waterton, Colorado, April 15.
With core mate complete, the space vehicle was named in honor of NASA trailblazer and “hidden figure” Katherine Johnson.
The two-day core mate consisted of using a 10-ton crane to lift and complete a 90-degree rotation of the satellite’s system module, and then slowly lowering the system module onto the satellite’s vertical propulsion core. The two mated major subsystems come together to form an assembled GPS III space vehicle.
Despite the COVID-19 pandemic, the Space and Missile Systems Center (SMC) and its mission partner Lockheed Martin ensured that SV08 core mate took place, in accordance with all Centers for Disease Control and local guidelines to minimize exposure or transmission of COVID-19. The GPS III Processing Facility’s cleanroom high bay was restricted to only key personnel directly supporting the operation.
“Core mate is the most critical of the GPS space vehicle single-line-flow operations,” said Lt. Col. Margaret Sullivan, program manager and materiel lead for the GPS III program. “Despite the restrictions presented by the COVID-19 pandemic, our team adapted and worked tirelessly to achieve this essential milestone.”
Katherine Johnson. (Photo: NASA)
Katherine Johnson. When the core mate operation is successfully completed, a GPS III satellite is said to be “born.” In keeping with the team’s tradition of naming GPS III satellites after famous explorers and pioneers, SV08 was named “Katherine Johnson” in honor of the trailblazing NASA mathematician and “human computer” who designed and computed orbital trajectories for NASA’s Mercury, Apollo and space shuttle missions.
One of four African-American women at the center of the nonfiction book by Margot Lee Shetterly and the movie Hidden Figures, Johnson was awarded the Presidential Medal of Freedom in 2015 for her groundbreaking contributions to the U.S. space program.
Other GPS III satellites have been named in honor of explorers including GPS III SV01 “Vespucci” after Amerigo Vespucci; GPS III SV02 “Magellan” after Ferdinand Magellan; and GPS III SV03 “Columbus” after Christopher Columbus.
Next up, performance tests. The next step for the newly christened “Katherine Johnson” is the post-mate Systems Performance Test (SPT) scheduled to begin in August. SPT electrically tests the performance of the satellite during the early phase of build and provides a baseline test data set to be compared to post-environmental test data.
GPS III SV08 is currently scheduled to launch in 2022.
The Mobile Service Tower rolls back from the ULA Delta IV rocket carrying the GPS III SV02 satellite in preparation for launch. (Photo: ULA)
GPS III is the most powerful GPS satellite ever developed. It is three times more accurate and provides up to eight times improved anti-jamming capability over previous GPS satellites on orbit. GPS III brings new capabilities to users as a fourth civilian signal (L1C), designed to enable interoperability between GPS and international satellite navigation systems, such as Europe’s Galileo system.
GPS III satellites will also bring the full capability of the Military Code (M-code) signal, increasing anti-jam resiliency in support of the warfighter. These continued improvements and advancements to the GPS system makes it the premier space-based provider of positioning, navigation, and timing services for more than four billion worldwide.
GPS III SV03 is scheduled to launch on June 30.. (Photo: Lockheed Martin)
GPS III SV03 to Launch June 30. Launched in December 2018 and August 2019, GPS III SV01 and SV02 became part of today’s operational constellation of 31 satellites, on January 13 and April 1, 2020 respectively. GPS III SV03 is scheduled to launch on June 30.
The SMC, located at the Los Angeles Air Force Base, California, is the center of excellence for acquiring and developing military space systems. Its portfolio includes the GPS, military satellite communications, defense meteorological satellites, space launch and range systems, satellite control networks, space based infrared systems, and space situational awareness capabilities.
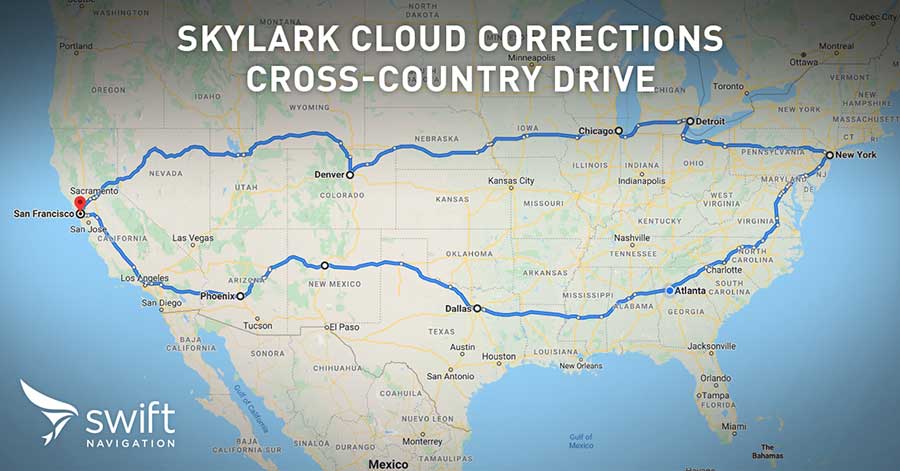
Swift’s first-of-its-kind, cross-continental drive demonstrates the performance of Skylark. (Image: Swift Navigation)
Swift’s first-of-its-kind, cross-continental drive demonstrates the performance of Skylark.
Swift Navigation, a San Francisco-based tech firm redefining GNSS and precise positioning technology for autonomous vehicles, has completed a cross-country drive test.
The goal of this first-of-its-kind drive, from San Francisco to New York and back, was to measure the efficacy of Swift’s recently expanded Skylark cloud corrections service and to demonstrate true nationwide lane-level GNSS correction coverage at the accuracy, reliability and availability levels required by Swift customers.
The drive took the Swift team across 26 states and Washington, D.C., with 6,614.7 miles (10,645.4 km) driven over 116 hours and 14 minutes logged. A Swift vehicle was equipped with 20 different GNSS devices, tested using six unique chipsets that included: Swift’s Piksi Multi, Duro and multiple leading GNSS silicon providers.
The results of the drive confirmed that Swift’s precise positioning solution — composed of Skylark and the Starling positioning engine — delivers consistent lane-level accuracy at continental level. Skylark delivered 100% availability, with sub-decimeter accuracy, over the entire United States, wherever cellular coverage was available.
Performance highlights from the drive:
+Sub-meter horizontal accuracy (2-sigma) achieved across all environments
100% Skylark availability
Highly repeatable results with Starling + Skylark across variety of dual-frequency GNSS chipsets
“This is the longest continuous GNSS-based precise positioning drive test of its kind and we are proud of the engineering team at Swift for undertaking this ambitious task,” said Anthony Cole, executive vice president of engineering. “The results show that Skylark performs as intended and expected in both open sky and urban environments and demonstrate that Skylark is truly a cross-continental corrections network delivering the high integrity and high availability required by automotive OEMs, last-mile applications, rail, mobile and micro-mobility companies.”
In addition to full contiguous U.S. (CONUS) coverage, the Skylark corrections service is now available in Europe and is being built out to support autonomous applications across the globe.
Download a complete write-up of the cross-country drive test at www.swiftnav.com.
Members of Congress were not pleased with the new U.S. Department of Homeland Security (DHS) report on positioning, navigation and timing (PNT), saying the long-delayed report contained numerous errors and failed to address many of the things Congress had required.
On the April 8, DHS submitted to Congress the brief, 26-page report on the nation’s PNT requirements. It took more than three years to produce and was delivered more than two years late.
In comparison, just two weeks earlier a team of eight British organizations sponsored by the European Space Agency (ESA) issued a 1,174-page report on the PNT needs of maritime commerce. The report from the Maritime Resilience and Integrity of Navigation (MarRINav) project was produced in less than a year.
House Transportation Committee Chair Peter DeFazio (D-OR), Armed Services Readiness Subcommittee Chair John Garamendi (D-CA) and Representative Alex Mooney (R-WV) expressed their disappointment this week in a letter to DHS Acting Secretary Chad Wolf. In addition to outlining their concerns, it asked that the report be retracted, rewritten and resubmitted within six months.
While the letter did not specifically mention the contrast between the DHS and British efforts, it did use the MarRINav report as a reference. And it was clear that the disparity in length and quality of the reports accentuated the disappointment for those who had hoped for a better product from DHS.
The letter asked that the report be retracted, rewritten and resubmitted within six months.
Factual errors
Factual errors in the DHS report, according to the letter, included getting the mandated timing for financial systems wrong, and mischaracterizing coverage areas and capabilities of various technologies including several that had been recently demonstrated for the Department of Transportation (DOT).
The letter also observed that DHS focused on commercial PNT users to the detriment of most Americans. It failed to consider the needs of public service organizations, governmental entities, and individual citizens in its analysis.
The lawmakers contend the report did not recognize that PNT provided by GPS is frequently a safety-of-life service and a public good that must be reinforced to protect economic vitality and national security.
Suspending operations, subscribing are flawed options
Two of the solutions to temporary GPS disruptions suggested in the DHS report are for users to suspend operations until the disruption is over, and to have purchased commercial PNT services as backups in advance of a disruption.
Suspending operations for emergency services and other critical functions is unacceptable, say the congressmen. And commercial PNT services to provide needed wide area PNT backups are not available.
Even if they were available, questions of affordability for the many non-profit and public entities that needed them, whether it would be more cost effective for the federal government to support such services, and similar issues would need to be addressed before the department could make a recommendation.
Suspending operations for emergency services and other critical functions is unacceptable.
No national backup
The letter also observed that the department has discounted the value of a national backup system, a position that seems to conflict with both longstanding and recent presidential policy. Having a backup for GPS has been policy since President Bush established the requirement in 2004. President Trump’s recent Responsible Use of PNT Executive Order called for a national research program on non-space-based PNT and “…mandates the Department of Commerce make available a GNSS independent source of Coordinated Universal Time for all users.”
DHS’ recommendation against a national backup also differs from the Europe/UK MarRINav report. In addition to calling for improvements to be made by commercial entities such as port and ship operators, MarRINav identifies the need for “terrestrial and sovereign” eLoran and VHF DES Ranging mode systems to support reliable maritime commerce. Establishing such systems will require support by the national government.
Most members of industry agree that some government involvement is needed. A CEO of one of the companies demonstrating its backup technology for DOT observed that the market would never solve the problem on its own.
“We have tried for 16 years to figure out a business case, and it’s just not there,” the CEO said. “GPS is too good and it’s free. You can’t compete with that. If America is going to have one or more new wide-area capabilities that most people can use — not just niche solutions for high-demand, well-heeled customers — the government is going to have to prime the pump.”
DHS did propose some efforts that resonated with the Congressmen, such as encouraging use of GPS receivers that resist spoofing and jamming. The lawmakers described these as “necessary but grossly insufficient” before requesting the report be withdrawn and redone.
DHS’ “Report on Positioning, Navigation, and Timing (PNT) Backup and Complementary Capabilities to the Global Positioning System (GPS)” is available here.
The letter from Congressmen DeFazio and Garamendi is available here.
The Maritime Resilience and Integrity of Navigation (MarRINav) project report is available here.
The technology multinational GMV has won a contract under the Spanish Ministry of Defense’s (MoD’s) RAPAZ program for the supply of four Class I Seeker RPASs to be integrated into the intelligence units of the Paratrooper Brigade and the Tercio de Armada de Infantería de Marina (Marine Infantry Protection Force).
The contract will provide the armed forces with the most advanced version of the unmanned aircraft Seeker.
The UAS Seeker is an autonomous, rapid-deployment system developed by Aurea Avionics and supplied by GMV. It provides intelligence, surveillance and reconnaissance capabilities over a 15-kilometer range with a 90-minute endurance and a weight of 3.5 kg.
The aircraft will strengthen the intelligence, surveillance and reconnaissance capabilities of Spanish troops, ensuring better operational capability and tactical superiority.
Seeker constitutes the core of a situational awareness system, providing real-time intelligence. It is designed for rapid-deployment and high-mobility military applications carrying out low-level intelligence, surveillance and reconnaissance tasks.
The system components can be broken down into two major groups: the air segment and the ground segment. The air segment comprises the unmanned aerial system (UAV), fit for daytime and nighttime operations and capable of completely autonomous flying. The ground segment comprises a ground control station, a ground data terminal, and a remote handheld control. These systems between them monitor the UAV’s operation and process its real-time video data.
Within this project, due for delivery by October 2020, GMV will be running the design and manufacturing activities and also the various flight campaigns scheduled to check that the systems work properly before handover to the MoD.
GMV developments for unmanned aircraft
GMV boasts great expertise and experience in Unmanned Aerial Systems (UAS), built up on the strength of many previous projects such as ATLANTE, where it developed the aircraft’s flight control computer; EGNSS4RPAS, where it weighed up EGNOS performance for RPAS operations; and DOMUS, where it developed emergency-management and -monitoring service demonstrators for drone traffic control under the U-Space system.
This Spanish MoD Seeker system supply contract boosts GMV’s growing renown as developer and supplier of UAV systems and services.
Oceanographic & Geophysical Instruments (OGI) has selected iXblue’s Atlans INS to provide robust and uninterrupted data georeferencing to its newly unveiled mobile-mapping lidar solution dedicated to road assessment surveys.
A fully integrated mobile mapping solution, this new vehicle-based system integrates advanced systems to provide highly detailed georeferenced survey data to transportation departments throughout the United States.
“Highly accurate and reliable georeferencing of the collected data being crucial for road assessment operations, we were seeking a compact and robust navigation solution for our mobile scanner project,” said Darren Moss, program manager at OGI. “We tested other inertial navigation systems (INS) during mobile surveys in New York City and Boston with poor results, as those INS units relied mainly on GPS signals. Maintaining good GPS signals in the urban canyons of large cities proved to be impossible. This deeply impacted the georeferencing of the acquired lidar data, leading to highly inefficient operations. This is the reason we turned to iXblue’s Atlans A7 INS.”
Based on fiber-optic gyroscope (FOG) technology, the Atlans A7 north-seeking INS offers highly accurate and robust data georeferencing. Resistant to GPS outages, it enables continuous acquisition operations within environments lacking continuous GPS signals. The Atlans A7 is a valuable system for high-accuracy data acquisition without interruption.
“Working with iXblue in other markets, we were familiar with the high-quality instrumentation they are known for. We were confident their FOG-based INS systems would perform even during GPS outages,” Darren said. “By choosing the Atlans A7, we are assured to get robust and uninterrupted georeferenced data in urban environments, tunnels, forests, and mountainous areas, which is crucial for our customer’s operations. With this INS, iXblue brings high-end FOG performance to the mobile-mapping industry at a very affordable price.”
“The Atlans A7 integrates very well within our new mobile lidar solution and, combined with Teledyne Optech Polaris high-resolution lidar scanner and QPS Qinsy display and acquisition software, it brings high-accuracy and efficiency to the core of our Mobile lidar solution,” Darren said.
TDC’s Freeance field applications leverages Trimble GNSS for accurate, streamlined data collection
TDC Group has joined Trimble’s GIS (geographic information system) Business Partner Program. As part of the program, TDC has implemented the Trimble Precision SDK (software developer kit) to integrate high-accuracy positioning capabilities in its Freeance mobile software applications running on tablets and smartphones using Trimble GNSS receivers.
Freeance provides field crews with simple yet powerful and configurable location-based mobile apps to manage data collection and inspection activities across utility and public works organizations. By adding the Trimble R1 and R2 receivers to Freeance workflows, users are empowered with real-time access to high-quality, reliable data.
The Trimble R1 receiver will be accessible with TDC’s Freeance software. (Photo: Trimble)
“Trimble recognizes the value our GIS software partners bring to our customers by delivering targeted, industry-specific solutions,” said Stephanie Michaud, strategic marketing manager, Trimble Survey & Mapping Field Solutions. “We’re very pleased to collaborate with TDC and leverage their domain expertise, and to integrate Trimble technology into the Freeance solution for the utilities and public works markets. As a direct result of this relationship, Freeance users can now work with the confidence of knowing their field workflows are precision-enabled with Trimble GIS technology.”
“We’re excited about the integration of high-accuracy Trimble GNSS receivers with Freeance software that enables organizations to add sub-meter or better accuracy to mobile workflow activities using smartphones and tablets,” said Matthew Reddington, CEO of TDC Group. “Adding high-accuracy positioning to field workflows by means of simple mobile apps paired with Trimble GNSS increases the quality and uses of data captured during field operations.”
The U.S. Department of Homeland Security (DHS) issued a report on alternative sources of PNT on May 6. It was submitted to U.S. congressional committee leaders on April 8.
Section 1618 of the 2017 National Defense Authorization Act (NDAA) of Dec. 23, 2016, required the DHS to address the need for a GPS backup by identifying and assessing viable alternate technologies and systems.
The report is a summary and analysis of that assessment by the Homeland Security Operational Analysis Center (HSOAC) of PNT systems currently used by critical infrastructure. It also provides recommendations for the federal government’s next steps to increase the resilience of critical infrastructure to disruption of GPS services.
In the report, DHS offers the following recommendations to address the nation’s PNT requirements and backup or complementary capability gaps:
Temporary GPS disruptions: End users should be responsible for mitigating temporary GPS disruptions. For example, the Federal Aviation Administration maintains sufficient PNT capabilities to assure the continued safe operation of the national airspace, albeit at a reduced capacity, during GPS disruptions. The federal government can facilitate this mitigation for various critical infrastructure sectors, but should not be solely responsible for it.
PNT Diversity and Segmentation: The federal government should encourage adoption of multiple PNT sources, thus expanding the availability of PNT services based on market drivers. Encouraging critical infrastructure owners and operators to adopt multiple PNT systems will diffuse the risk currently concentrated in wide-area PNT services such as GPS. Federal actions should focus on facilitating the availability and adoption of PNT sources in the open market.
System Design: PNT provisioning systems, assets, and services must be designed with inherent security and resilience features. Critical infrastructure systems that use PNT services must be designed to operate through interference and to identify and respond to anomalous PNT inputs. These attributes are applicable to the PNT receivers and the systems that use them.
Pursue Innovation that Emphasizes Transition and Adoption: Incorporating PNT signal diversity into the PNT ecosystem should be pursued with an emphasis on research and development that prioritizes successful transition and adoption into existing GPS receivers, taking into account factors such as business case considerations, financial costs, technical integration, and logistical deployment.
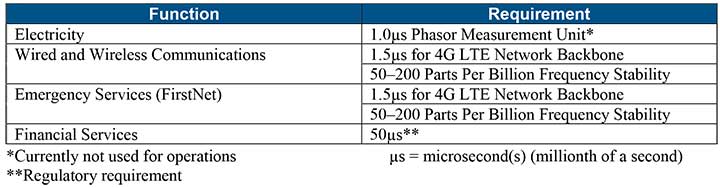
Table 1 shows timing requirements for critical infrastructure are, according to the report.
Table 1. (Image: DHS report)
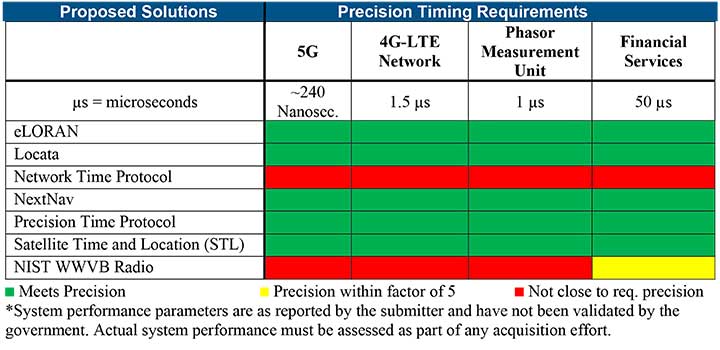
Table 2 from the report shows proposed timing solutions submitted by industry to DHS during a Request for Information (RFI) in December 2018. Systems that can meet or exceed timing requirements for critical infrastructure are indicated in green.
Table 2 (Image: DHS report)
Satelles responds
The Satelles company, which offers STL, issued a statement on the report. “This important report highlights the urgent need for GPS backup for critical applications, and it identifies and characterizes a variety of solutions that are available to meet this need today,” said Michael O’Connor, CEO of Satelles. “The report also describes the essential role of the federal government in urging industry to implement multiple technologies, without making the mistake of providing or selecting a single PNT solution.”
Continued O’Connor, “DHS goes on to define a baseline requirement for timing services accuracy for critical infrastructure. Not only does Satelles meet or exceed the precision timing specifications stated by DHS, but also our solution provides national coverage (including Alaska, Hawaii, and U.S. territories) and is commercially available now.”
Signing the letter were Senators Mike Lee, Brian Schatz, Ron Johnson, Edward Markey, Ted Cruz, Mark Warner, John Thune and Chris Coons. All except for Senator Coons serve on the Senate Committee on Commerce, Science and Transportation, which oversees the FCC. Senator Coons serves on the appropriations subcommittee that funds the FCC each year.
The letter referred to the hearing held by the Senate Armed Services Committee on the issue, and stated that only parties opposed to the FCC’s action were heard. The senators were concerned that the public also hear from the FCC.
Thirteen specific questions covered topics including:
How long the proceeding was on the docket
What notice given federal agencies of the proposed final order
Which agencies were consulted and how input was considered
The adequacy of the guard band and how the FCC has used the 1-db interference standard in the past
The 13th question asked the FCC why it believed granting the application was in the public interest.
A copy of the letter is available on the Resilient Navigation and Timing Foundation website.
Orolia has introduced a low SWaP-C miniaturized rubidium oscillator, the Spectratime mRO-50, designed to meet the latest commercial, military and aerospace requirements where time stability and power consumption are critical. The oscillator is low SWaP-C — size, weight, power and cost.
The Spectratime mRO-50 provides a one-day holdover below 1 µs and a retrace below 1 x 10-10 in a form factor sized 50.8 x 50.8 x 19.5 millimeters. It takes up only 51 cc of volume — about one-third of volume compared to standard rubidiums — and consumes only 0.45 W of power.
he Spectratime mRO-50 miniaturized rubidium oscillator provides accurate frequency and precise time synchronization to mobile applications, such as military radio-pack systems in GNSS-denied environments. Its operating temperature of -10°C to 60°C (military version extends to -40°C to 75°C) is also suitable for UAVs and underwater applications.
Orolia is a leader in space-based atomic clocks and high-end crystal, rubidium, hydrogen maser and integrated GPS/GNSS clocks. The company also provides testing instruments for space missions that rely on high precision atomic clock technology.
Orolia’s Atomic Clocks team received the 2019 PTTI Distinguished Service Award in January for advancing the state of the art in high-stability atomic clocks and producing the only space-based passive H-maser in the world, operating on all Galileo satellites. Spectratime mRO-50 is the latest technology solution from this award-winning team.
“Through Orolia’s continuous commitment to innovation, we are proud to offer our customers more precise PNT data in a cutting-edge, lightweight form factor for mobile missions,” said Orolia’s Atomic Clocks Product Line Director, Jean-Charles Chen.
Skyports’ delivery drone, manufactured by Wingcopter, takes flight. (Photo: Wingcopter)
Skyports and Thales are partnering to conduct a drone delivery trial for the National Health Service (NHS) to support the United Kingdom’s COVID-19 response.
The trial, being conducted in Scotland, aims to prove the feasibility of delivering urgent medical cargo, such as COVID-19 test kits and Personal Protective Equipment (PPE), between remote medical facilities by delivery drone. The trial is backed by Argyll and Bute Health and Social Care Partnership (HSCP) — the integrated partnership of NHS Highland and Argyll and Bute Council directed by the local Integration Joint Board.
U.K. drone delivery provider Skyports will conduct the trial and operate the flights using delivery drones supplied by unmanned aircraft-maker Wingcopter, because of its proven capability through numerous delivery operations around the world. The trial flights will be planned through Thales’ drone operations management platform, SOARIZON, which offers digital tools to maintain compliant and safe drone flying operations.
Based at Lorn and Islands Hospital in Oban, the trial will consist of two-way flights between the hospital and Mull and Iona Community Hospital in Craignure 10 miles (16km) away on the Isle of Mull.
As COVID-19 testing rapidly gathers pace in the U.K., the proposed delivery service will help to ensure that isolated communities have access to tests, delivered in a fast and efficient way. Currently, the majority of medical supplies and specimens are transported between the laboratory at Lorn and Islands Hospital, surrounding general practitioners’ surgeries and other healthcare settings by sea and road, a long and complicated journey.
The service would cut delivery times from up to six hours one way by ground transport and ferry, to 15 minutes for on-demand delivery by drone. The speed would contribute to keeping front line medical and delivery personnel safe.
Answering the call from government and Argyll and Bute HSCP, in response to the COVID-19 crisis, the trial is the result of rapid mobilization from industry as well as the Civil Aviation Authority (CAA), local government, NHS Scotland and the U.K. Department for Transport (DFT). Argyll and Bute HSCP has been at the forefront of exploring with Skyports the use of unmanned aircraft technology, building on preliminary work with the Scottish government on the possibility of drone use by the public-sector emergency services in Scotland.
The two-week trial represents a crucial milestone for unmanned aviation in the U.K. Under current rules, drones must always be flown within visual line of sight of the remote pilot. To undertake these more extended flights (beyond visual line of sight, or BVLOS), the project team has been in close consultation with the CAA.
Through this trial, the alliance aims to prove the long-term, sustainable viability of such services; bringing together regulation, government and industry to unlock the transformational potential of drones for society when used in a safe, secure and controlled way.f this new service.”
Thales and Skyports are also working together within the CAA Regulatory Sandbox programme, exploring how regulatory approvals can be granted for more widespread BVLOS drone operations in the U.K.
Once the trial has been successfully completed, the team will continue to work closely with the CAA and the NHS to make services available in Scotland and across the U.K. to provide access to this innovative technology to a wide range of organisations, in particular a number of other NHS Boards and Trusts.