A new digital signal generator that can be reprogrammed on-orbit, enabling it to broadcast new signals
Digital signatures for detecting spoofing attacks
Steerable regional beams in multiple frequencies and signal codes
“Bounce-Back” capabilities for recovery from attack, solar and other disruptions
The NTS-3 marks the first time in 40 years the service has launched such a pioneering effort, following GPS.
The Department of Defense PNT Strategy calls for future military efforts and the results to be classified, making it unlikely that NTS-3 experiments will benefit the majority of PNT users in the civil sector.
Orolia Maritime has revealed the FastFind ReturnLink PLB with Return Link System (RLS) life-saving beacon system.
Orolia worked closely with the European GNSS Agency (GSA) on the Galileo satellite system since the company was selected to lead development of next-generation search-and-rescue (SAR) distress beacons. Earlier this year, Orolia introduced the first Galileo-enabled personal locator beacons (PLBs).
Building upon this, the new FastFind ReturnLink transmits the user’s unique ID and GNSS location via the global network of Cospas-Sarsat search-and-rescue satellites, and then uses Galileo’s Return Link Service to transmit a return signal back to the user’s device to confirm the alert has been received and location has been detected.
The PLB displays a blue light to inform the user that search-and-rescue professionals are aware of their situation and location and that they are not alone.
“We are dedicated to producing SAR products that keep people safe on land and sea, and the FastFind ReturnLink PLB is Orolia Maritime’s most advanced search and rescue beacon to date,” said Chris Loizou, vice president of Maritime at Orolia. “The psychological impact of knowing that help is on the way cannot be underestimated, and this PLB will provide invaluable peace of mind for those in distress.”
The FastFind ReturnLink PLB uses the latest SAR technology, packed into a simple, rugged and lightweight palm-sized unit. Features include:
Multi-constellation GNSS — both Galileo and GPS receivers.
Belt-attachable buoyancy pouch and life-jacket oral tube clip attachments.
No subscription.
Five-year battery life.
Waterproof to 10 meters.
SOS Morse LED flashing light and RLS Reassurance blue flashing light.
Safe-stow antenna and three-stage activation.
Galileo’s RLS is expected to be fully operational in January 2020.
The funding enables continuation of a national effort by state government geospatial information officers and coordinators to work with other state agencies, local elections officials and state elections offices, national GIS (geographic information system) and elections organizations, and federal partners to identify opportunities to leverage this powerful technology to strengthen elections management and citizen engagement.
“As an organization made up of GIS leaders in state government, NSGIC is uniquely positioned to leverage the innovative work of states to use GIS for elections data,” said Molly Schar, NSGIC executive director. “We have enlisted those innovators to contribute and advise throughout the project. Collaboration has been key to the success of the project. Relationships built in the first phase of the project will be invaluable to the work of the second phase as the project seeks to increase engagement and, ultimately, impact.”
Two more years. The Geo-Enabled Elections project was launched in October 2017 and will now continue for an additional two years. The project aims to help strengthen electoral systems by supporting states in the adoption of GIS.
In practical terms, this means encouraging state governments to replace non-spatial address-file systems with election precinct and voter data in a GIS format, leveraging that format’s inherent visual and analytical advantages.
With its second phase, the project turns to focus on working hands-on with up to 10 more states through the pilot program, developing a curriculum for elections officials on foundations of GIS in elections, increasing awareness of the benefits of geo-enabling elections systems among elections stakeholders, and developing policy guidance and advocacy tools to support integration of GIS in elections.
“Accurate boundary lines and efficient voter placement are the building blocks of our elections and are tantamount to the integrity of the democratic process,” said Tammy Patrick, senior advisor at Democracy Fund Voice. “Democracy Fund Voice is a proud sponsor of efforts such as NSGIC Geo-Enabled Elections as a way to further ensure that the American electorate is well served.”
A report of the work done in the first phase of the project is now available.
Accomplishments in the first two years include:
developing an inventory of state implementations of GIS-based elections systems
giving workshops and presentations at national conferences
publishing detailed reports sharing the state of GIS in elections from the perspective of election officials and state GIS leaders
five pilot and case studies
development of a best-practices guide (both in detail and brief versions) was developed
Also, an inaugural Elections GeoSummit in August convened stakeholders from the national, state, and local levels to discuss best practices for geo-enabling elections in the United States.
These documents and other important resources can be found in a PDF format on the NSGIC website.
Autonomous vehicle startup announces availability of driving sensing solutions for purchase to OEMs
DeepRoute has released for sale its autonomous vehicle sensing solution, DeepRoute-Sense. DeepRoute is a CES 2020 Innovation Award Honoree.
Photo: DeepRoute
DeepRoute-Sense is an L4-level self-driving full-stalk solution that aims to enable the autonomous vehicle industry to achieve quicker sensor deployment. It includes a sleek, lightweight set-top box and sensor-fusion calibration service.
The roof box consists of GNSS, eight vehicle cameras, three lidars and a series of other sensors to help correspondence and data synchronization between the controllers.
DeepRoute has independently designed the mechanical structure of the roof box, which has outstanding diversion, heat dissipation and sealing functions. The set-top box is lightweight, small and with high impact resistance. With four tripods, the roof box can be easily mounted to the roof of different vehicle models for sensor deployment.
“The team at DeepRoute has worked hard on the development of DeepRoute-Sense and we are excited to finally share our technology with the industry,” said Shuang Gao, COO of DeepRoute. “By bringing this to the market, we are hoping to fuel progress within the industry and bring full vehicle autonomy to be one step closer to the masses.”
The solution uses a DeepRoute-developed in-vehicle camera that features anti-glare, anti-ghosting and highly reliable signal detection. Compared with industrial cameras, the camera comes at a lower cost, but also offers a higher dynamic range.
The roof box has been developed to accommodate different and extreme weather conditions, whether it be during intense sunlight or nighttime high-beam illumination, and can stably handle the exposure and avoid overexposure.
The set-top box includes a sensor data-processing device, the ADS Synchronous Controller. It is pre-processed and fused with the massive data from GNSS, cameras, lidars and other sensors through high-precision time and space synchronization. The ADS Synchronous Controller also supports DNN and SLAM hardware acceleration, which greatly increases computational efficiency.
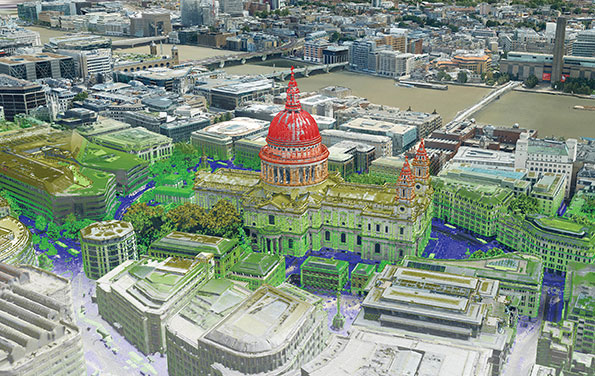
Pointfuse has developed smart software that automates the identification and classification of objects for facilities management applications using data from mobile mapping systems like the new Leica BLK2GO.
Pointfuse software converts the millions of individual measurements captured by laser scanning and photogrammetry into useable 3D mesh models. The unique ability to classify objects within Pointfuse, both automatically and manually, has already had a huge impact on how as-built data is used within design and construction. It can now realize real time records for space utilization and optimization projects, reducing costs and speeding workflows within facilities management.
The Leica BLK2GO. (Photo: Leica Geosystems)
Pointfuse Simple BIM (sBIM) leverages the core functionality of Pointfuse — the segmented mesh model; automatically converting classified mesh models into “family” groups, such as walls, floors, doors, windows, etc. for use with popular downstream BIM and FM software. Pointfuse sBIM data can then be exported as IFC (Industry Foundation Class) parametrized objects and 2D floors plans and space management reports easily derived. Pointfuse sBIM also automatically calculates quantities, areas and dimensions in an easy to read PDF report.
“This ability to convert classified objects into family place holders has a huge impact on how as-built data is used within a Scan2BIM workflow with the potential for a real return on investment for facilities and space management applications,” said Mark Senior, regional sales director at Pointfuse. “The combination of ease and speed of data capture, as offered by modern hand-held indoor mapping systems like the newly launched Leica BLK2GO, with the automation of Pointfuse processing will release the potential of laser scanning across this sector.”
Pointfuse sBIM was developed in response to a large scale client opportunity that saw the scanning of millions of square feet of facilities with the final deployment of data in Archibus facilities management software using Autodesk Revit as a bridge. Early testing identified that 3D was as quick to create as traditional 2D workflows and exported data is in the region of hundreds of Kbs compared to the Gb volumes of the original point cloud. Taking the process one step further Pointfuse provides an accurate record of the as-built scene by allowing users to create Hybrid meshes combining Pointfuse models with the sBIM IFC container.
Pointfuse will be showcasing the sBIM functionality at the Autodesk University (AU) Expo which takes place Nov. 19-21 at the Sand Expo Convention Centre in Las Vegas, Nevada.
Trimble, Hilti and Boston Dynamics are collaborating to explore the integration of Trimble’s and Hilti’s construction-management software solutions, GNSS technology and reality-capture devices with Boston Dynamics’ Spot Robot platform.
Autonomous robots can play a significant role in construction, specifically in production and quality control workflows by enabling automation of routine and tedious tasks, reducing workload and improving safety. The companies will collaborate to develop a “proof-of-concept” solution.
Equipped with Trimble’s and Hilti’s reality capture devices as its payload and directly communicating with a cloud-based construction management application, the Boston Dynamics Spot Robot will be able to provide consistent output, deliver improved efficiency on repeatable tasks and enable up-to-date as-built data analysis.
The autonomous, terrain-agnostic capabilities support the dynamic nature of the construction environment, enabling the robot to bypass obstacles and maintain its defined path to support routine tasks such as daily site scans, progress monitoring, asset management and remote support.
Multi-directional communication between the robot, Trimble’s and Hilti’s payloads and the cloud application support a continuous flow of information and closes the loop for the construction environment.
“Utilizing robots for routine tasks in hazardous environments to improve safety, efficiency, and data capture consistency is part of our digital transformation vision” said Aviad Almagor, senior director for Mixed Reality and Brain-Computer Interface (BCI) at Trimble. “We are excited for this latest collaboration and looking forward to the potential integration of our hardware and software solutions with the Boston Dynamics’ Spot Robot to enhance field-oriented workflows, reduce amount of rework and facilitate on-site tasks.”
“Trimble’s and Hilti’s domain knowledge, market leadership and technologies are a great fit for our robotic platform,” said Michael Perry, vice president of Business Development at Boston Dynamics. “Deploying an integrated solution in the real-world environment doing dirty and dangerous work, before, during and after the construction stage is a common vision for the three companies, which can help drive the transformation of the construction industry.”
Septentrio’s post-processing kinematic (PPK) software has been upgraded with multi-GNSS and BaseFinder functionality. BaseFinder improves project efficiency by automatically finding the most suitable reference station data needed for centimeter-level accuracy.
Both GeoTagZ and PP-SDK now feature BaseFinder, which speeds up survey workflow by automatically finding reference data needed for augmenting GNSS logs with sub-centimeter accuracy. BaseFinder accesses an online database of reference networks and extracts the most suitable corrections available. BaseFinder is available via an app or via an API and can be incorporated into any existing software.
PPK is often used for ground surveys with aerial drones, allowing high precision georeferencing without the need for a real-time base station link or ground control points (GCPs).
“Surveying without a base station will allow users to reduce costs and set-up time. With this PPK upgrade we are improving the end-user experience as well as developer experience,” said Danilo Sabbatini, product manager at Septentrio.
The new release of this GNSS post-processing software also includes two additional GNSS constellations: European Galileo and Chinese BeiDou. Having access to all the signals from all GNSS constellations improves reference network compatibility. It also improves positioning availability in difficult environments. This is particularly important when working in areas of low satellite visibility such as near tall structures or under foliage.
When doing photogrammetry with a drone, GNSS data is often recorded and then post-processed together with base station data to achieve sub-centimeter positioning accuracy. This base station data can be obtained either with proprietary base stations or by using base station data from a public reference network (see diagram below). Septentrio receivers are designed to bring accurate and reliable positioning to photogrammetry, aerial inspection, marine survey as well as mobile mapping.
GPS Post-Processing SDK architecture, bringing high-accuracy positioning without the need for a real-time correction stream. (Diagram: Septentrio)
A roundup of recent products in the GNSS and inertial positioning industry from the November 2019 issue of GPS World magazine.
SURVEYING & MAPPING
IMU-RTK receiver
Increases GNSS availability and reliability
Photo: CHC Navigation
The i90 IMU-RTK GNSS series receiver is designed to dramatically increase GNSS real-time kinematic (RTK) availability and reliability. The i90 is powered by the company’s latest inertial measurement unit (IMU) and RTK technology to provide robust and accurate GNSS positioning in any circumstances. Unlike standard micro-electro-mechanical (MEMS)-based GNSS receivers, the i90 GNSS IMU-RTK combines a high-end calibration and interference-free IMU sensor with a state-of-the-art GNSS RTK engine and advanced GNSS tracking capabilities. The i90 is designed to increase the productivity and reliability of survey projects, with no complicated calibration process, rotation, leveling or accessories are necessary. A few meters’ walk will initialize the i90 internal IMU sensor and enable RTK survey in difficult field environments. The i90 GNSS automatic pole-tilt compensation boosts survey and stakeout speed by up to 20%.
Both accurate and rugged for machine control, logistics
The AsteRX-SBi has a rugged housing, making it suitable for machine control and other outdoor uses. (Photo: Septentrio)
Septentrio has expanded its GNSS/INS portfolio with the AsteRx SBi, a new housed GNSS/INS receiver. The ruggedized AsteRx SBi fuses high-accuracy GPS/GNSS with a high-performance inertial sensor to provide reliable positioning and 3D orientation for machine control and logistic applications. Within its rugged, waterproof enclosure, a high-performance GPS/GNSS is coupled with an industrial-grade inertial sensor to provide high-accuracy, reliable positioning and 3D orientation (heading, pitch, roll). Offering the flexibility of either single or dual antenna, the AsteRx SBi is designed for quick and easy integration into any machine monitoring or control system. Reliable location and 3D orientation data is streamed with a high update rate and constant low latency. Septentrio’s reliable centimeter-level positioning is based on true multi-frequency, multi-constellation GNSS (GPS, GLONASS, Galileo, BeiDou, QZSS) technology.
The Trimble X7 laser scanning system is designed for surveying, construction, industrial and forensic applications. It enables professionals to quickly and easily capture precise 3D scanning data to produce high-quality deliverables. The X7 features Trimble X-Drive technology, survey-grade self-leveling and a smart calibration system. It integrates streamlined workflows to provide automatic registration of point-cloud data in the field with Trimble Registration Assist, bringing scans together through self-leveling inertial measurement unit technologies and cloud-based software.
The Bluesky MetroVista range includes high-resolution imagery combined with high-accuracy, wide-scale 3D models. (Image: Bluesky)
The MetroVista city mapping service for Europe incorporates the Leica CityMapper hybrid airborne sensor designed for 3D city modeling and urban mapping. The sensor includes a vertical camera and survey-grade oblique cameras, and incorporates lidar to accurately collect elevation and infrared data. The MetroVista range includes high-resolution imagery combined with high-accuracy, wide-scale 3D models. CityMapper has already been used to capture MetroVista data for cities across the United Kingdom, including London, Manchester, Newcastle and Bristol.
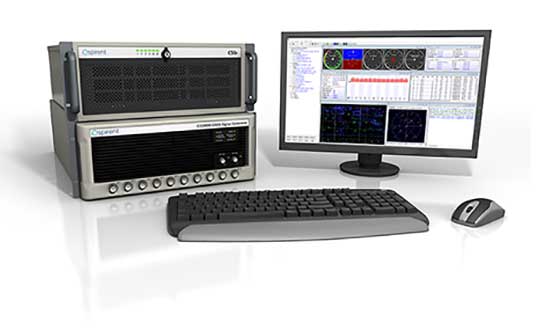
The enhanced GSS9000 series GNSS constellation simulator has been updated to provide significantly improved capability, flexibility and performance to meet the test needs of high-performance navigation systems. It doubles the number of supported channels (320 in a single chassis) while maintaining its full performance specification in key areas such as signal iteration rate and low latency under maximum signal dynamics. These attributes, together with the ability to produce a comprehensive range of emulated multi-GNSS, multi-frequency RF signals, enables full and future-proofed testing of advanced applications. Greater signal flexibility is also built into the enhanced GSS9000 through its open application program interface (API) and flexible architecture. This delivers a highly sophisticated arbitrary waveform generator (AWG) capability.
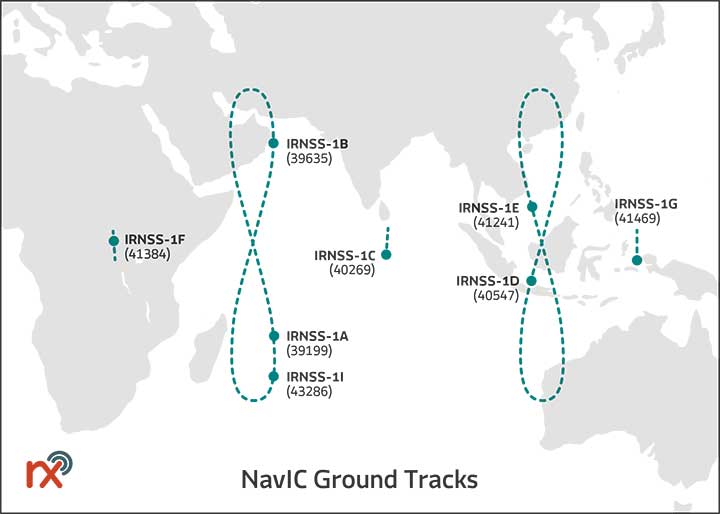
Rx Networks has added NavIC constellation support to its real-time and predicted-assistance data service. The company’s technology partners — semiconductor vendors, mass-market mobile device manufacturers and network operators — now have global support for all satellite navigation systems and L1 satellite-based augmentation systems (SBAS) for any region around the world. Used daily by more than two billion devices, Rx Networks data is delivered via ephemeris in RINEX and via the Location.io interface, with predictions in SP3. Predictions for NavIC via the Location.io platform will be added in the first quarter of 2020.
Endura micro-electro-mechanical system (MEMS) timing solutions are designed for aerospace and defense applications including precision GNSS. They provide high performance in harsh conditions such as severe shock, vibration and extreme temperature. SiTime offers customers 5 million possible part numbers that can be created from 17 programmable products. Solutions accommodate 4 parts per trillion per g force of acceleration (50 times better than quartz); support for –55° C and +125° C operation; timing specifications conforming to MIL-PRF-55310; and Endura Super-TCXOs (temperature compensated oscillators) for use in GNSS applications.
Portos Team paired with the Ninja. (Photo: IP-Solutions)
Portos Team is a new GNSS RF signal record-and-playback system. It can record and play back — or simulate —multi-frequency, multi-system GNSS signals when paired with the company’s Replicator. It can do the same for CRPA signals when paired with the company’s Ninja. The Portos itself can also operate as multi-frequency or CRPA front end for a GNSS software receiver.
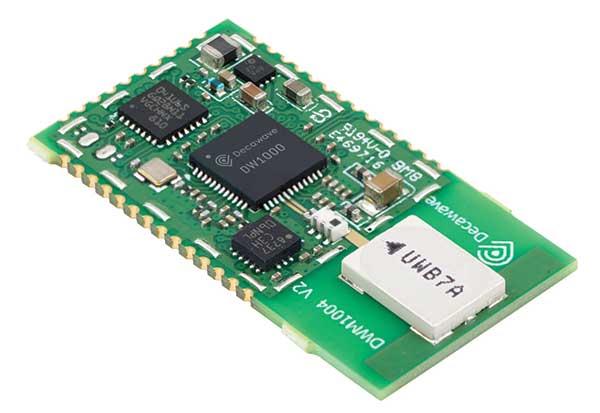
The DWM1004 module targets time difference of arrival (TDoA) tag applications that require years of battery life and a compact design. Based on the DW1000 chipset, the DWM1004C offers high-accuracy, real-time-location capability with a 6.8-Mbps data rate. It delivers more than five years of battery life. Real-time location systems (RTLS) enable managers to have a real-time view of their operations through data collected from connected objects such as tools, pallets, forklifts, badges and collars. The DW1000 is immune to multipath fading, with 2-centimeter precision in indoor environments.
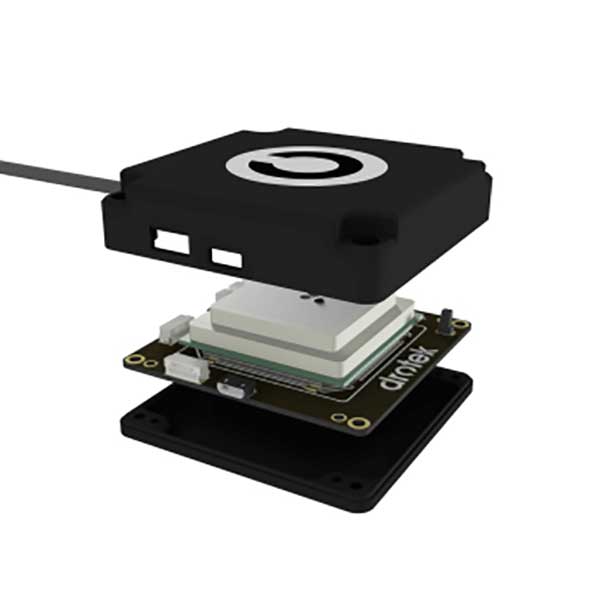
The F9P Sirius RTK GNSS rover is designed to be mounted on a moving vehicle. The u-blox ZED-F9P module inside provides 1-cm position accuracy, a convergence time under 10 seconds and a navigation update rate up to 20 Hz. The rover has a built-in active antenna patch. It receives GPS, Galileo, Beidou and GLONASS signals, providing additional accuracy. It is designed to fit most setup designs as well as integrate easily into a vehicle. Its six-pin JST-GH connector makes it plug-and-play with the Pixhawk Pro 3 autopilot.
The VBOX Touch is a highly flexible GNSS datalogger with enhanced accuracy. The powerful hardware can be used diverse automotive tests such as acceleration, braking, speed verification, tire temperature monitoring, lap-timing and durability. The VBOX Touch comes preloaded with a sophisticated performance application that covers common use cases; applications can be downloaded from an online library. Racelogic can also write custom Python scripts based on customer requirements.
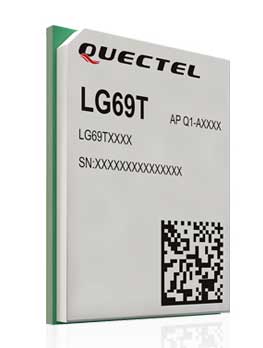
The LG69T GNSS module is an automotive-grade dual-band high-precision GNSS module that integrates dead-reckoning (DR) and real-time kinematic (RTK) technologies. The module facilitates open-sky positioning performance with an accuracy of up to 10 centimeters. It supports next-generation precision positioning capabilities for smart vehicles and autonomous driving scenarios. The LG69T module is based on ST’s STA8100GA, the latest automotive-grade dual-frequency positioning chip with 80 tracking channels and four rapid-acquisition channels compatible with GPS, BeiDou, Galileo, Navic and QZSS. The AEC-Q100-qualified dual-band module integrates multi-band RTK technology for centimeter-level accuracy. The LG69T module’s dead-reckoning capabilities feature an integrated inertial measurement unit (IMU) that provides continuous high-precision positioning.
The Coach II antenna with GNSS L1/L2/L5 is designed to provide greater precision and reliability for advanced rail communications systems, enabling next-generation positive train control (PTC) and passenger Wi-Fi. The Coach II features global multi-GNSS compatibility, dual-port 4G LTE / sub-6 GHz 5G NR and 802.11ac Wi-Fi / Bluetooth connectivity. It is AAR compliant for railway applications and is IP67-rated.
Includes new automotive package for Ellipse GNSS/IMU products
Photo: SBG Systems
New features have been added to the Ellipse product line with firmware update version 1.7. The update better answers needs of the autonomous testing and driving markets such as a CAN odometer. Users now have the choice to connect an external odometer (DMI) with pulses or use their car odometer with velocity information. New outputs include body velocity and slip angle, which calculate the drift angle between the vehicle’s assumed trajectory and its actual trajectory. For precision applications as well as low dynamics and reduced warm-up time, the new firmware allows users to run the Ellipse Kalman filter with no lever-arm estimation. This will ensure centimeter pass-to-pass accuracy for real-time kinematic (RTK) applications and allow operation in lower dynamics while reducing warm-up time. The firmware update also provides new features for advanced marine applications.
GNSS and inertial navigation sensors are meeting the challenges of extreme conditions, from freezing Arctic ice to the edges of steaming volcanoes, from high-speed aircraft over cities to the subways under them. Even beyond, into deep space.
IN THE ARCTIC
Wave Buoys Help Study Arctic Climate Change
Where the edge of Arctic ice transitions to open water, towering seas are smashing sea ice into melting pieces, with far-flung effects on climate and nature. Over recent decades, the Arctic has warmed more than any other region, leading to a significant reduction in sea ice volume. The combination of increased ice-free area and more mobile ice cover has led to the emergence of a seasonal marginal ice zone (MIZ) in the Beaufort Sea, north of Prudhoe Bay, Alaska.
The United States Office of Naval Research conducted a five-year study of the MIZ, which included intense field work in the freezing Arctic sea. Here, the ice is vulnerable to ocean surface waves that form in the open water, resulting from strong winds and frequent storms. Also studied were in-ice waves, where ice and water clash. The goal was to understand how both factors impact the ice floe melting.
The MIZ lies in the subarctic seas in winter and transitions into the interior of the Arctic Basin in summer. To investigate the MIZ’s dynamics, ONR engaged an international program of observations and simulations using several autonomous systems, including wave buoys. The wave buoys — officially designated the autonomous ocean flux buoys — integrate SBG Systems’ miniature inertial sensors.
The MIZ study comprised an international team of scientists from more than a dozen organizations.
Buoys for All Seasons. The program included 20 buoys deployed in the summer, and five in the winter, to quantify open ocean and in-ice wave characteristics and evolution. “We needed a very rapid and cost-effective solution to measuring directional wave spectra in the ocean,” said Martin Doble, oceanographer at the French UPMC School and member of the research program. “Time to deployment was very short, so an integrated solution, giving us good heave numbers straight out of the box, was essential. Delivery time of the units was also critical.”
Drilled into the ice, the summer buoys were powered with solar panels and equipped with SBG Systems’ IG-500A miniature attitude and heading reference system to detect both distant and near-wave effects on the local ice floe. Once the ice melted, the summer buoys continued to measure open ocean characteristics.
Five winter buoys were installed on the ice. These buoys were made of aluminum for better resistance and contained enough battery power to keep them going through the dark winter months. Every buoy also contained processing and control electronics, an SD card, a GPS receiver and an Iridium satellite modem and antennas to transmit the recorded data to its base station. Both summer and winter data from the buoys were used to quantify the wave attenuation rate.
Winter buoy installed on an ice floe. (Photo: SBG Systems)
By measuring the waves and ice, the buoys help scientists understand how waves are approaching and breaking up the sea ice. When winter approaches and ice begins to refreeze, the buoys help show how the waves interact with the ice as the temperatures change.
Calibration. The IG-500A inertial sensors were used for wave height and direction. IG-500A measures in real time the roll, pitch, heading (accurate to 0.35°) and heave (accurate to 10 centimeters). Every sensor is calibrated for bias, linearity, gain, misalignment, cross-axis and gyro-g from –40° to +85°C. The calibration is key to enabling the sensors to provide reliable data in the harsh environment.
Doble said the units were reliable, with no failures in the harsh Arctic conditions. They ran continuously for more than a year without requiring power cycling, and “the numbers look good, giving clear results.”
The data is helping researchers understand the physics that control sea ice breakup and melt in and around the ice edge. “We have this amazing picture of the ocean, atmosphere, and ice going from the fully frozen period in March to meltdown and breakup right through to freeze-up,” said Craig Lee of the University of Washington’s Applied Physics Laboratory.
The IG-500A sensors also delivered heave measurement, important for instrumented ocean buoys. During the project, SBG Systems released the Ellipse Series, and the new line replaced the IG-500 series. More accurate in attitude and more reliable (with an IP68 rating) for the same budget, the new miniature inertial sensors now provide a heave measurement that automatically adjusts to the wave period, resulting in higher performance.
Clear differences were measured between surface wave activity outside of the ice, and then moving into the ice, with huge attenuation as the waves enter the ice and die back quickly.
Current Arctic Program. Following the close of the MIZ project in 2015, the ONR launched a new project for 2016–2020, the Stratified Ocean Dynamics in the Arctic (SODA). SODA is also taking place in the Beaufort Sea, and is using the autonomous ocean flux buoys. The buoys are now equipped with SBG’s Ellipse-A sensors.
Why the Arctic Matters
“There’s no question that the Arctic sea ice extent is decreasing,” said Martin Jeffries, program officer for the ONR Arctic and Global Prediction Program. “Multiple sources of data — autonomous underwater gliders, ice-measuring buoys and satellite images of the marginal ice zone — were used to help understand why the ice is retreating.”
The implications for the U.S. Navy, and the world, are significant. If there were no sea ice in the Arctic at the end of summer, that would mean that the Arctic Ocean would, until the winter ice came in, be completely open — something unprecedented in living memory, Jeffries noted.
Naval leaders have made it clear that understanding a changing Arctic is essential for the Navy to be prepared to respond effectively to future needs.
“[T]he opening of the Arctic Ocean has important national security implications as well as significant impacts on the U.S. Navy’s required future capabilities,” said then Chief of Naval Operations Admiral Jonathan Greenert, in his introduction to the U.S. Navy Arctic Roadmap, 2014–2030, published in 2014. “The United States has a history of maritime homeland security and homeland defense concerns in the Arctic Region […] .”
In the period between 2007 and 2014, satellites recorded the eight lowest sea ice levels ever. A key goal of the MIZ and SODA programs is to use the new data collected to make better predictive computer models — ensuring safer operations for not only naval vessels, but also anticipated increased sea traffic by shipping and fishing industries; oil, gas and mining companies; and tourism operations.
Much of the data coming in to Arctic scientists is now from improved sensors, with greater ability to survive the harsh weather and ocean conditions.
Inside the Ellipse
Alexis Guinamard, chief technology officer of SBG Systems, described to GPS World the company’s most advanced sensor for extreme environments.
“Of course we have more precise sensors like Ekinox, Apogee or even Horizon, for ‘extreme’ precision. But for extreme environments, the more appropriate sensor line is the Ellipse series,” Guinamard said. “There are several key parameters that make them better for this kind of environment.”
Those features include a high-temperature calibration range, from –40°C to +85°C, which enables the sensors to operate at the same performance level in the most extreme temperature environments.
“While typical entry-level or industrial-grade sensors only provide a room temperature or basic temperature calibration, we have developed a calibration procedure used for both survey-grade and industrial-grade sensors using a precision two-axis rotary table with temperature chamber,” Guinamard said. “An advanced thermal modeling minimizes the calibration error over the full temperature range.”
Ellipse-D dual-antenna mini INS/GNSS. (Photo: SBG Systems)
The sensors work in highly dynamic and vibrating environments because their gyros operate well, changing position up to 900° per second. Similarly, their accelerometers can reach up to 40 g, with excellent behavior in vibrating environments. “We can typically install our sensors directly on the chassis of the vehicle, while lower grade sensors may require specific dampers that are complex to design and make it difficult to precisely align the sensor,” Guinamard said.
A GNSS interference-mitigation capability enables the sensors to perform in challenging GNSS environments.
With the Ellipse-D, high latitude operation is possible because it provides a dual-antenna heading that is insensitive to higher latitudes, Guinamard explained.
Saltwater-Proof. SBG Systems sensors typically have waterproof (IP68) enclosures that can deal with harsh conditions and sustain exposure to saltwater for a limited period of time. For long exposure to salt water, the company offers specific titanium enclosures. For instance, its Navsight series has a saltwater-proof inertial measurement unit.
Navsight marine solution. (Photo: SBG Systems)
The Navsight Marine Solution is a motion and navigation solution for hydrographers available as a motion reference unit (MRU), as an inertial navigation solution (INS) with embedded GNSS, and as an INS using a third-party GNSS receiver.
Navsight can be outfitted for demanding shallow- or deep-water environments to survey highly dense areas (bridges and buildings), as well as applications where only a single antenna can be used.
With the addition of the Horizon inertial measurement unit (IMU) to the Navsight line in January, which joined the Ekinox and Apogee IMUs, the line is suitable for large hydrographic vessels surveying harsh environments. The Horizon IMU is based on a closed-loop fiber-optic gyro (FOG) technology that enables ultra-low bias and noise levels, allowing robust and consistent performance.
Dust, noxious gas and loose rock near the summit makes volcanic surveying especially challenging. (Photo: Trimble)
AT VOLCANO’S EDGE
GNSS Tracks Magma on Mount Etna
Scientists seeking to better understand volcanoes are using GNSS to investigate one of the most active in the world.
Mount Etna, in eastern Sicily, Italy, has been erupting for hundreds of thousands of years. The constant activity makes it a popular tourist attraction — smoke often billows from the mountain and fiery lava spews down its sides.
Researchers flock to Mount Etna, too, to study the movement of magma — the hot fluid beneath the Earth’s surface from which rocks are formed when cooled.
To measure the vertical gradients of gravity on Mount Etna’s slopes and summit craters, geophysicists from Slovakia and Italy teamed up on a field campaign during which they used high-accuracy GNSS positioning with emphasis on accurate height measurements to collect gravimetry and topographic information.
The extreme environment and spotty cellular coverage on Mount Etna made using GNSS with real-time kinematic (RTK) or virtual reference station (VRS) a challenge. The geophysicists used the Trimble CenterPoint RTX correction service and Trimble R10 GNSS receivers to ensure reliable GNSS performance.
“On many points, especially the higher part of the volcano, Internet signals were poor or [there were] none at all,” said Juraj Papčo, a geodesist with the Earth Science Institute of the Slovak Academy of Sciences. “Only by using RTX were we able to collect real-time data. It performed well in higher elevations and difficult conditions.”
The project teams also used Trimble RTX to navigate to locations where they needed measurements. At each station, they collected static and real-time positions and later compared post-processed results with the real-time positions.
Dust, noxious gas and loose rock made approaching the summit especially challenging. Trimble RTX helped the Slovak-Italian team of geophysicists better understand volcanoes and anticipate volcanic events.
Researchers used high-accuracy GNSS positioning to collect gravimetry and topographic information. (Photo: Trimble)Prisms affixed to the track enable measurement of change and structural movement. (Photo: Topcon)
UNDER A METROPOLIS
Harsh Construction Environment Monitored
Deep beneath Paris, work is underway to expand the Metro, the city’s rapid transit system. The Grand Paris Express project encompasses a 200-kilometer-long network of railway lines — mostly underground — that will link the suburbs to the city.
The contractor responsible for monitoring construction of the first stage of the project’s infrastructure, Cementys, is using more than 100 instruments from Topcon’s MS series of robotic total stations because they can withstand the harsh construction environment.
Monitoring structural movement across the network is critical; the goal is to protect the surrounding Parisian structures and the people who live and work in them. Use of the monitors also ensures that the expensive equipment used on the project is not stolen.
Topcon’s MS Series robotic total stations continuously measure the angles and distances of prisms fixed to structures. As a result, site engineers know immediately when measurement change and structural movement occurs. The technology also includes Matrix Detection software to help increase the measurement system’s speed and accuracy. The company’s TSshield integrated security software, standard on all its total stations, provides remote locking and location positioning data to within 100 meters, depending on GPS and cellular coverage.
“We have been able to integrate this open technology perfectly into our global data management system, which also includes optical fibers sensors, vibrating wire sensors, and others,” said Cementys CEO Vincent Lamour.
Construction of the Grand Paris Express project is taking places in stages and is expected to be complete in 2030.
Photo:Position tracks from two laps of the race show that when the plane inverts and starts to track the reflected signal, the VN-300 GNSS/INS (blue trace) reverts to free inertial navigation and propagates the position based on inertial data. The trace follows a smooth trajectory through the next air gate until the GNSS data converges with the INS position. (Image: Google Earth with VectorNav Data)
ABOVE THE SEA
Flying High with Augmented Reality
The 2018 Red Bull Air Race World Championship in Cannes, France, made it easier for fans to follow along. Though pilots race one at a time, the new “Ghost Plane” augmented reality imagery provided fans with a real-time representation of each pilot’s flight, which challenges their speed, precision and skill maneuvering lightweight racing planes.
The Ghost Plane is driven by onboard telemetry data gathered during flight. For a pilot’s run to be accurately represented, the onboard telemetry system has to track position, velocity and attitude (yaw, pitch and roll) through high-dynamic maneuvers and in challenging environmental conditions.
While every Red Bull Air Race track layout is different, they all include a difficult vertical turning maneuver (VTM), where pilots pass through a gate and turn 180 degrees to reverse course quickly without exceeding the g limit.
Each plane is fitted with several GNSS receivers to track the plane, but dynamic maneuvers made during the race rapidly changes which satellites the GNSS receiver can track, which typically results in a loss of position fix.
To further increase the challenge for the telemetry systems, races are commonly held over water, which can reflect GNSS signals and create significant multipath errors at low altitudes. During the VTM, the plane can experience 300°/second angular rates and 12-g accelerations, during which GNSS tracking is typically lost because the antennas no longer point to the sky.
To make the Ghost Planes possible, a VectorNav VN-300 dual-antenna GNSS/INS (inertial navigation system) couples gyroscope and accelerometer data to propagate position and velocity estimates during loss of GNSS measurements through maneuvers such as the VTM.
The VN-300 combines two GNSS receivers with a 9-axis inertial measurement unit (IMU). It couples acceleration and angular rates from the IMU with position and velocity data from the receiver using a quaternion based Extended Kalman Filter (EKF). VectorNav algorithms work in conjunction with the state estimation filter, making the VN-300 more robust and intelligent, and enabling it to reject poor GNSS data and perform accurately in high-dynamic maneuvers and challenging operating conditions.
NEW EQUIPMENT
Antenna Designed for Challenging Environments
CHC Navigation’s latest GNSS antenna is an example of a product designed specifically for harsh environments.
AT311T antenna. (Photo: CHC Navigation)
The heavy-duty CHCNAV AT311T is designed for demanding applications subject to shocks and vibrations. With advanced filtering and robust signal tracking, it provides survey-grade GNSS signals to enhance position reliability for marine applications, machine control, precision agriculture and industrial automation.
Features include multi-constellation GNSS tracking using GPS, GLONASS, BeiDou, Galileo, QZSS, IRNSS and SBAS. Its IP68 water-resistant design makes it safe to use in extreme conditions with a wide temperature range (–40°C to +85°C). Its internal stacked structure enhances performance in high-interference environments, and the 40-dB signal gains, advanced signal filtering and multipath rejection design provide superior and robust GNSS signal tracking in challenging surroundings.
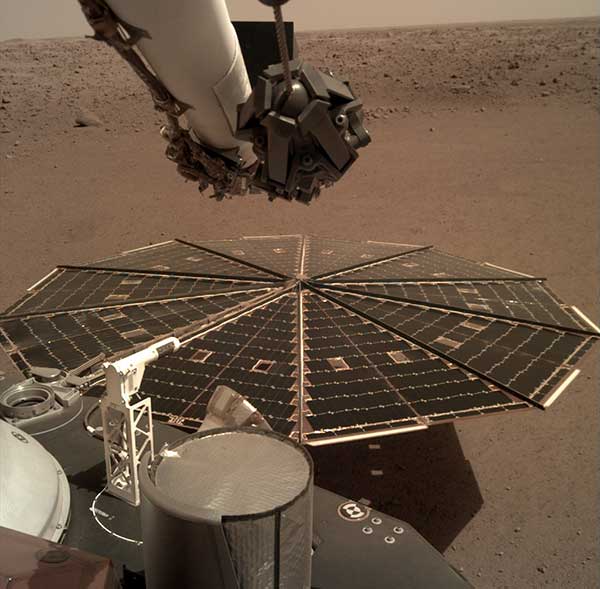
One of the two solar arrays on the InSight lander dominates this view of the plain of Elysium Planum, taken Dec. 4, 2018. (Image: NASA/JPL-Caltech)
IN OUTER SPACE
Exploring Beyond Earth
While GNSS isn’t useful on the surface of Mars, inertial navigation is a key technology for exploration of the red planet. For instance, the Northrop Grumman LN-200S sensor guided the Mars Opportunity rover, which explored Mars for 15 years until a storm struck in June 2018.
The LN 200S sensed acceleration and angular motion, with its data output used by the rover’s control systems for guidance.
The hermetically sealed unit, suitable for planetary and asteroid probes, helped position the rover’s antennae to relay photos and data to satellites. Opportunity beamed back 187,000 raw images, according to NASA.
Because IMUs don’t depend on satellites, they work well for deep space missions, Honeywell explained in a press release.
In November 2018, NASA’s InSight spacecraft landed on Mars to study the interior with a heat probe and listen for marsquakes with a seismometer. Aboard was Honeywell’s Miniature Inertial Measurement Unit (MIMU), an IMU that has been a part of Lockheed Martin’s Mars satellites and landers since 1998.
The MIMU is a three-axis strapdown device specifically designed for the satellite and deep-space-probe market (more than 500 MIMUs have been deployed throughout the solar system). It uses ring laser gyros to help control and stabilize a spacecraft during entry, descent and landing, as well as maintain orbit and payload orientation. The radiation-hardened design supports 15-year missions.
“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
Photo: i viewfinder/Shutterstock.com
It’s their land, too
Animal tracking is helping biologists see how many animals rely on wildlife crossings over or under highways. In the United States, specially designed crossings protect pronghorn antelope (Wyoming), panthers (Florida), mule deer (Nevada), moose (Utah) and grizzly and black bears (Montana), while crossings in Asia benefit rhinos, tigers and elephants. With crossings, mortality drop as much as 90%, says The Washington Post. In New Mexico, state agencies and tribes are tagging animals with GPS collars to identify roads that hinder migration. Meanwhile, engineers in Southern California are designing the world’s largest animal crossing, an $87 million overpass that will span a 10-lane Los Angeles freeway for the region’s mountain lions.
Tesla, come to me
Photo: Tesla
The new Tesla Smart Summon feature in Autopilot v10 autonomously drives the car to meet its owner, such as in a parking lot. Smart Summon has been used more than 550,000 times, Tesla CEO Elon Musk said on Twitter. But it has a few glitches: Owner tests have resulted in fender-benders, near crashes, ignored stop signs and a police run-in. And don’t test it with another Tesla nearby — the cars get confused.
Help, I’m shark bait!
Photo: European GNSS Agency
The Galileo Search and Rescue (SAR) service was demonstrated Sept. 26 off the coast of Belgium. In Operation Shark Bait, a volunteer “victim” — Australian broadcaster Tara Foster — operated her Galileo-enabled SAR beacon from a life raft off the port of Ostend. The service quickly triggered, with the rescue initiated in under four minutes.
Wheelchair navigation
A new app launched in Portsmouth, England, helps people with limited mobility plan their travel routes. The Route4U pavement navigation app benefits both wheelchair and pram (stroller) users, allowing them to discover safer, more accessible routes across the city. The app indicates pavement obstacles, surface quality, curb heights and widths, inclines and travel distances.
The winners of this year’s MyGalileoApp competition were announced at a ceremony held at the European GNSS Agency (GSA) headquarters in Prague on Nov. 7.
First prize of EUR 100,000 went to ARGEO, a mobile app based on geolocation, augmented reality and blockchain that allows users to discover content such as prizes, coupons and shopping cards geo-located around the streets of a city.
Second prize, worth EUR 50,000, went to the Tractor Navigator app, which provides guidance for farmers driving tractors, enabling them to visualise their position and trajectory in an open field. Finally, the EUR 30,000 third prize went to Ready Park, an app that makes parking easier by pairing drivers leaving a spot with users looking for one.
The 10 finalists from eight countries made their pitches to a panel of jurors throughout the afternoon of Nov. 7, after which the jury reached its decision on the winning apps.
Welcoming the competitors to the finals, GSA Executive Director Carlo des Dorides noted that the 10 finalists had been selected from a total of 150 competing teams, representing more than 35 nationalities.
“The MyGalileoApp competition is the largest app development competition ever organised within the Galileo programme. After reaching 1 billion smartphones equipped with Galileo earlier this year, the next big challenge is to develop applications that will make best use of the Galileo differentiators,” des Dorides said.
Following the pitches was an investors’ panel, with presentations by experts from various institutions, including venture capital firms and accelerators, providing information on how apps can bridge the gap between great ideas and viable business opportunities.
“Private and public investors will have an opportunity today to expand their investment portfolio with the Galileo apps generated by the competition, helping to transform the apps into commercial successes,” des Dorides said, adding that the goal of the MyGalileoApp competition was not just to make beautiful apps, but to create jobs and generate economic growth. For a full agenda of the day’s events, click here.
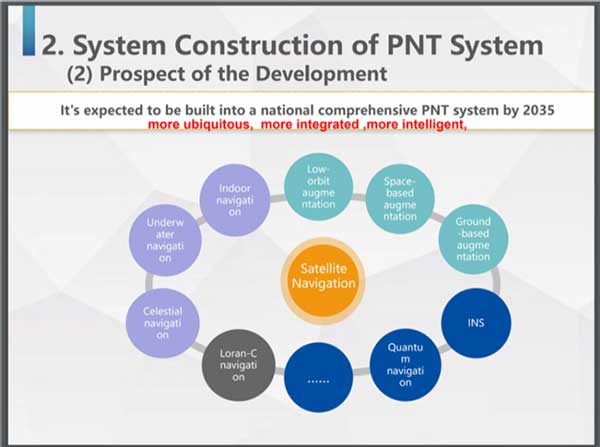
Speaking at the annual Stanford Positioning, Navigation, and Timing (PNT) Symposium, a Chinese representative described how her nation is building the world’s first resilient and robust, and, in her words, “comprehensive” PNT architecture.
Xiaochun Lu presents at Stanford PNT Symposium on Oct. 30, 2019. (Photo: Stanford University)
Xiaochun Lu of China’s National Timing Service Center described a multi-source PNT system that will be “more ubiquitous, more integrated, more intelligent.”
Centered around continually upgraded BeiDou GNSS at medium earth orbit (MEO), it will incorporate a wide variety of other PNT sources. These will include a PNT constellation at low earth orbit (LEO), Loran-C, inertial sensors, and systems like quantum navigation that have yet to be developed.
A new PNT constellation at LEO was mentioned several times in the presentation according to Rich Lee, CEO of iPosi, who attended the symposium. Lee has advocated the benefits of LEO PNT and suggested the U.S. should pursue such a system to augment GPS.
Research has shown that received signals from PNT constellations at LEO will be stronger and more difficult to disrupt than those from MEO. When combined with MEO PNT signals, they will also enable much more precise positioning.
In discussions after her presentation, Lu indicated that China has an application pending at the ITU for 120 LEO PNT satellites flying at 700 km.
Also noteworthy was inclusion in the architecture of China’s existing Loran-C terrestrial PNT system. China has operated this system for decades and regularly coordinates its integrated use with Russian and South Korean systems as part of the Far East Radio Navigation Service (FERNS).
Xiaochun Lu discusses China’s Comprehensive PNT Plan with Rich Lee of iPosi and Logan Scott of Logan Scott Consulting at 2019 Stanford PNT Symposium. (Photo: Stanford University)
The United States terminated Loran-C service in 2010 over the objection of its national PNT advisory board. Europe’s Loran system was taken off the air at the end of 2015. This was despite the United Kingdom’s implementation of a more accurate and automated eLoran version at the beginning of that year.
Today the United States is in the process of establishing a terrestrial backup system for GPS timing that could be expanded to include positioning and navigation services.
Europe has acknowledged that GNSS alone is insufficient for critical and safety of life applications. Officials are examining what that means in terms of systems required.
China”s announcement at Stanford is the first for a plan to build a comprehensive national PNT architecture.
Graphic: Xiaochun Lu, China National Timing Center
Both Europe and the United States have published radionavigation plans, though these tend to be more descriptions of current systems than forward looking and actionable plans.
The United States published a “National Positioning, Navigation, and Timing Architecture Study” in 2008. Little action was ever taken to implement its recommendations. A graphic from this document was included in Lu’s Stanford presentation indicating that the U.S. study may have helped inspire and motivate China’s plan.
Xiaochun Lu presents at Stanford PNT Symposium on Oct. 30, 2019. (Photo: Stanford University)
In August 2019, the U.S. Department of Defense publicly released its PNT strategy. It is similar in many ways to the Chinese plan described by Lu, calling for the use of multiple and diverse sources of PNT. As part of this, Army Futures Command is working with the University of Texas to leverage for PNT thousands of yet-to-be-built communications satellites planned to be deployed at LEO.
U.S. military PNT efforts, though, are unlikely to help protect the American populace. The defense department strategy says that civil use of GPS has hindered the ability to leverage it for military purposes. Future U.S. military PNT systems will be “increasingly classified” and therefore not available for civil use.