New OEM boards provide next-generation ASIC technology
Hemisphere GNSS has released its next-generation digital and RF ASIC (application-specific integrated circuit) platforms, as well as three new positioning and heading OEM boards – the first products incorporating these technological advancements.
Hemisphere’s new Lyra II digital ASIC and Aquila wideband RF ASIC designs optimize performance and provide the ability to track and process more than 700 channels from all GNSS constellations, the company said. Signals supported including GPS, GLONASS, Galileo, BeiDou, QZSS, SBAS and L-band signal support and tracking for AltBOC and BS-ACEBOC, BeiDou Phase 3, L5, and QZSS/LEX CLAS-D and CLAS-E.
The new ASIC technology offers scalable access to every modern GNSS signal available.
Also, the Lyra and Aquila ASIC technology provide the foundation for a new GNSS receiver chipset architecture that significantly reduces the number of board components required, thereby reducing complexity, improving reliability and lowering power consumption.
The powerful technology platform also includes Hemisphere’s new Cygnus interference mitigation technology with built-in digital filtering capabilities and spectrum analysis. The Cygnus technology provides enhanced anti-jamming, interference detection, and mitigation.
“The successful development of these new ASIC platforms is an important milestone on Hemisphere’s technology roadmap,” said Farlin Halsey, president and chief executive officer of Hemisphere. “Lyra, Aquila, and Cygnus-based technologies represent a significant investment and addition to our intellectual property portfolio — one that enables us to continue providing best-in-class GNSS performance and allows our customers and OEM partners to take their solutions to an even higher level.”
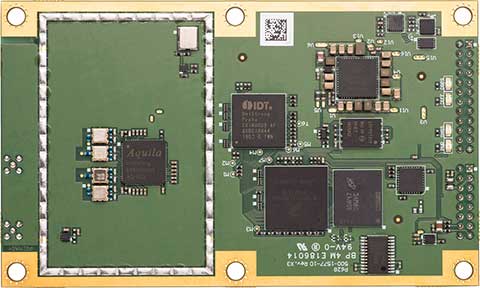
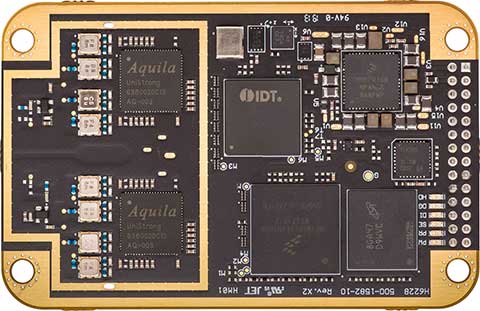
The new Lyra, Aquila and Cygnus technologies will be made available with the new Phantom 40, Vega 28 and Vega 40 OEM positioning and heading boards.
According to the company, the Phantom 40 positioning board is the first Lyra-based offering in a line of all-new, low-power, high-precision OEM boards. The Phantom 40 is a multi-frequency, multi-GNSS receiver that boasts 700 channels including access to Hemisphere’s Atlas GNSS global corrections network. The 60 mm x 100 mm module with 24-pin and 16-pin headers is a significant upgrade for existing designs using this industry standard form factor.
The Vega 40 and Vega 28 are the first introductions in a new line of low-power, high-precision, positioning and heading OEM boards. The multi-frequency, multi-GNSS Vega 40 and Vega 28 GNSS receivers offer access to 1,100 channels including access to Hemisphere’s Atlas GNSS global corrections network.
The Vega 40 is a 60 mm x 100 mm module with 24-pin and 16-pin headers and is an upgrade for existing designs using this industry-standard form factor. The Vega 28 is a 41 mm x 71 mm positioning and heading module, which represents the smallest GNSS OEM heading module Hemisphere has ever offered to the geospatial market.
Hemisphere is integrating this new technology into other form factors and into many of its existing product portfolios and plans to introduce those products in the coming months.