The S631 smart antenna on a tripod. (Photo: Hemisphere GNSS)
Hemisphere GNSS distribution agreement with Volvo Construction Equipment to provide new S631 GNSS survey smart antenna
Volvo Construction Equipment North America will add the Hemisphere GNSS S631 Survey Smart Antenna to its marketplace portfolio for Volvo CE dealers and end users. The new S631 adds robust performance and high precision in a compact and rugged package.
The distribution agreement with Volvo CE expands Hemisphere GNSS’s list of partners offering Hemisphere’s latest technology for machine control products and solutions.
The addition of the Hemisphere GNSS S631 Survey Smart Antenna aligns with Volvo CE’s focus on the latest technology and solutions for machine control applications, the company said.
“Partnership between Hemisphere and Volvo Group companies goes back 15 years when we began to provide Volvo Penta our heading units for marine applications,” said Randy Noland, VP Global Sales and Business Development at Hemisphere. “That business provided a technological foundation between our two organizations that eventually brought us together again with Volvo CE as a provider of high-precision, rugged GNSS receivers for machine control for use in Volvo Co-Pilot products. We are pleased the partnership continues to grow, with additional GNSS receivers now available as an extended offering through Volvo CE North American dealers. We greatly value our relationship.”
About the S361 Smart Antenna
The S631 provides robust performance and high precision in a compact and rugged package. With multiple wireless communication ports and an open GNSS interface, the S631 can be used in a variety of operating modes, as a rover or base station.
The built-in web user interface (WebUI) can be used to control and manage the receiver status and operation, as well as to upgrade the S631 with new firmware and activations.
Corrections. S631 is Athena-enabled and Atlas-capable (subscription required). With Athena, S631 provides precision RTK performance when receiving corrections from a static base station or network RTK correction system. With multiple connectivity options, the S631 allows for RTK corrections to be received over radio, cell modem, Wi-Fi, Bluetooth or serial connection.
The S631 receiver also enables users to work with Atlas, Hemisphere’s global correction service. Atlas delivers worldwide centimeter-level correction data over L-band communication satellites.
Key Features
Multi-frequency GPS, GLONASS, BeiDou, Galileo, QZSS, IRNSS and Atlas L-band
Long-range RTK baselines up to 50 km with fast acquisition times
UHF (400 MHz and 900 MHz), cellular, Bluetooth and Wi-Fi wireless communication
Athena GNSS engine for precision RTK performance
Internal sensor corrects collected point coordinates to within 2 cm
The collaboration ensures smooth and easy integration of high-accuracy GPS/GNSS positioning and professional-level autopilots into control systems where safety and reliability matter
Septentrio is collaborating with MicroPilot, maker of professional UAV autopilots.
Septentrio receivers, including the small form factor mosaic modules, as well as the OEM board AsteRx-m3, will support seamless integration of positioning and orientation into MicroPilot’s autopilot ecosystem.
MicroPilot chose Septentrio GNSS receivers for their resilience to radio interference such as jamming and spoofing, as well as security and robustness with high-accuracy real-time kinematic (RTK) positioning.
Self-interference or self-jamming is a common occurrence in UAVs, where devices such as cameras, servos or antennas, which emit electromagnetic radiation, are located close to the GPS receiver. Incorporating GNSS technology that is resilient to jamming and spoofing, in combination with reliable professional-level autopilots, is key to safe and secure flight navigation, according to Septentrio.
“Adopting new and resilient technology in UAVs is vital, and we want to ensure a smooth integration process into professional drone systems,” said Gustavo Lopez, senior market access manager at Septentrio. “We are very excited about the strong collaboration between Septentrio and MicroPilot, which now provides new alternatives to drone companies looking for safe and reliable flight operations.”
In addition to developing autopilots, MicroPilot provides supporting software and services that enable customers to use development time more efficiently, reducing time to market.
“Working closely with Septentrio gives MicroPilot the ability to better leverage resilient and robust GNSS technologies strengthening our offering to the professional UAV market for safe and reliable flight control,” said Howard Loewen, president of MicroPilot.
The open-source collaboration features Orolia Atomic Reference Time Cards powered by its Spectratime micro-atomic clock
Orolia is providing Atomic Reference Time (ART) Cards to support Meta’s implementation of high-precision timing protocols within its distributed timing infrastructure. The architecture of Orolia ART Cards is powered by the company’s Spectratime mRO-50 mini rubidium atomic-clock technology.
The Spectratime mRO-50. (Photo: Orolia)
“We are honored to have this opportunity to collaborate with Meta’s incredibly talented team of engineers to develop a unique open-source solution using our mRO-50 technology,” said Jean-Yves Courtois, Orolia CEO. “We look forward to a continuing partnership with Meta and other global network leaders working to advance solutions to ensure ongoing timing accuracy and resilience.”
Orolia developed the ART Card solution in collaboration with the Meta engineering team to fulfill a new specification that Meta published for the Time Appliances Project Initiative of the Open Compute Project. This new collaborative community is focused on designing from scratch new hardware and software to efficiently support the critical timing accuracy and resilience demands on computer network infrastructure. This project is fully open-sourced and available on Orolia’s GitHub.
In 2020, Meta began converting its data-center servers to a new time-distribution service based on network time protocol (NTP) and precision time protocol (PTP). The new service, built in-house and later open-sourced, was more scalable and improved the accuracy of timekeeping within the Meta infrastructure from 10 milliseconds to 100 microseconds. Orolia ART Cards will further increase the accuracy, resiliency and adoption of Meta’s new timing platform.
Developed with long-term support in mind, Orolia’s ART Cards deliver management, disciplining and monitoring functions that can be integrated into any computer with a PCIe port and bring accurate and resilient timing for the most demanding applications such as NTP/PTP time reference, time stamping and latency calculation.
NAVISP includes projects for autonomous and connected driving. (Image: ESA/F. Bagiana)
Many of the experts that designed and oversaw the Galileo system are now supporting European companies in developing new navigation technologies and services through the Navigation Innovation and Support Programme (NAVISP) of the European Navigation Agency (ESA).
NAVISP supports navigation research and development, such as ways to improve satellite navigation, alternative positioning systems, and new navigation services and applications. Working in partnership with European industry and researchers, more than 200 NAVISP projects have been initiated so far.
NAVISP is divided into three elements.
Element 1 focuses on improving and expanding satellite navigation, as well as establishing novel positioning, navigation and timing (PNT) services.
Element 2 focuses on innovation for competitiveness, developing new PNT products and services.
Element 3 supports European Union Member State priorities, including support for national testbeds and programs.
On April 21, the Pentagon announced an $800 million security package for Ukraine defense, including 121 tactical unmanned aerial systems (UAS) dubbed Phoenix Ghost drones.
According to the Pentagon, the drones were rapidly developed by the Air Force specifically to meet Ukraine’s requirements. The Ghost drones are manufactured by Aevex Aerospace and have similar capabilities to the single-use “kamikaze” Switchblade UAS from AeroVironment.
The U.S. is also sending at least 300 more Switchblade drones, according to CNBC, though which model has not been revealed. The 300 variant is designed to strike small targets. It can fit in a rucksack, weighs a little more than 5 pounds and has a range of 10 miles. The 600 version of the weapon is designed to destroy tanks and other armored vehicles. It weighs slightly more than 120 pounds and has a range of more than 40 miles.
AeroVironment is also donating more than 100 Quantix Recon UAS and operational training services to Ukraine’s Ministry of Defence and territorial forces. Using the actionable intelligence gathered by the Quantix Recon, operators can conduct quick mission planning and verification to help keep Ukrainian ground forces out of harm’s way. Delivery of the Quantix Recon UAS is independent of other AeroVironment tactical missile systems and UAS provided to Ukraine by the United States.
The Phoenix Ghost drone is similar to the single-use Switchblade drone from AeroVironment. (Photo: AeroVironment)
ComNav Technology has released a powerful and reliable UAV aerial mapping solution capable of centimeter-level positioning, providing high-precision photos and data for mapping professionals.
Based on the company’s K8 platform, the package consists of an E300 real-time kinematic (RTK) drone, flight-control software and an optional camera.
Featuring high accuracy, strong compatibility, long endurance, high performance and an easy workflow, the E300 drone package can meet the requirements of many different applications, including topographic survey, urban construction, forestry investigation, emergency rescue, 3D modeling, mining and surveying.
High Accuracy. The E300 RTK drone is embedded with a high-precision K8 GNSS module that supports GPS L1/L2/L5, BeiDou B1/B2/B3/B1C/B2a, GLONASS L1/L2, Galileo E1/E5-a/E5-b/AltBOC/E6 and QZSS L1/L2/L5. With Quantum III technology, the K8 GNSS module provides reliable and stable RTK positioning results.
The professional post-processed kinematic (PPK) software Compass Solution supports the full-constellation calculation, providing accurate positioning results.
RTK/PPK provides dual backup, one as a failsafe for another, to ensure acquisition of data. The built-in antenna further increases precision of photo position. EVENT synchronization technology can reduce camera trigger error and ensure high performance of the solution.
With its intelligent recognition algorithms, the E300 is able to capture high-resolution images consistently even in complex environments.Moreover, the E300 has a multipath redundancy design with key modules for safety.The solution can provide centimeter-level positioning results without ground control points, saving time.
Compatibility. Featuring a carrying capacity of 3 kg, the E300’s payload bay is compatible with a wide range of cameras, including C20, C50, LiAir VH2 and others. Payloads can be quickly and easily swapped in the field for maximum versatility.
Besides supporting standard NTRIP protocol, the E300 is compatible with all brands of base stations and continuously operating reference stations.
Long Endurance. The E300 is characterized by an ultra-efficient aerodynamic design. It reaches a 60-minute flight time without payload and 50 minutes with a basic payload, covering areas with a maximum 10-km radius per flight. In one flight, the E300 can map about 0.62 km² in 1.5-cm/px ground sample distance with one battery.
The E300 RTK drone features a simplified design for easy and rapid assembly within minutes while providing excellent stability and vibration resistance.
TomTom and SWARCO have entered a strategic partnership to enable customers to improve their mobility-management operations by using floating car data-based traffic services to complement physical sensor hardware already installed in the field.
The high-quality traffic services from TomTom, generated from millions of anonymously collected GPS data from apps, cars and devices, are now integrated and available for public entities via SWARCO’s urban mobility management suite MyCity. This data source will enable SWARCO to offer a high-value enhancement to the traffic information it already provides to its customers.
Benefits to MyCity customers include:
real-time travel times for user-defined routes
historical reports on travel time to enable data-driven decision making and impact analysis
triggering strategies based on real-time floating car data to automatically adjust signal plans, reroute traffic or take other traffic management actions
filling potential blind spots between existing roadside sensors to get a complete picture of the traffic situation.
The strategic partnership between SWARCO and TomTom also includes a joint thought leadership program to educate the market further, regular alignments about new features and product updates, and intensified collaboration on funded research projects.
Experts from both companies are available to take city officials, traffic managers, consultants and partners on a test drive of the newly available solutions as well as offer free trials.
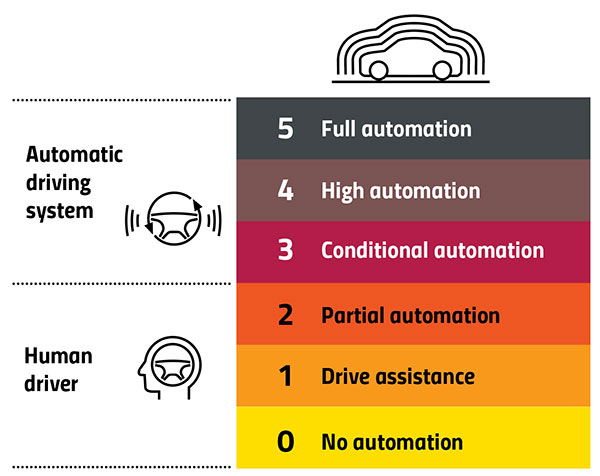
DeepRoute.ai, an international autonomous driving technology company, is offering a Robotaxi fleet equipped with its Level 4 autonomous driving solution, Driver 2.0.
Level 4 autonomous vehicles do not require human interaction in most circumstances, but a driver still has the option to manually override.
Image: GPS World
According to DeepRoute.ai, its advancement in autonomous technology previews the future of Level 4 consumer vehicles.
Composed of 30 SAIC Motor Marvel R SUVs, the Robotaxi fleet will deploy in Shenzhen, China, in the coming months.
Mass Production. Driver 2.0 was engineered for mass production and adoption by automakers. DeepRoute.ai projects mass production of Level 4 autonomous vehicles equipped with Driver 2.0 will begin in 2024 and be available for consumer purchase afterward.
DeepRoute.ai is collaborating with global automakers to achieve series production of Level 4 autonomous driving vehicles and expects to further reduce the current $10,000 cost of the solution by approximately 70%.
Driver 2.0 sensor configurations can be customized to meet automakers’ needs, equipped with two to five solid-state lidar scanners and eight cameras. Its proprietary low-energy consumption computing platform and inference engine combined with Nvidia Drive Orin systems-on-chip will allow the company to meet automotive-grade standards for series production more quickly, the company said.
DeepRoute.ai’s camera-based redundancy perception system guarantees autonomous capabilities should other sensors malfunction, in addition to 5G remote control and network safety redundancy fused into the safety-critical systems.
Level 4 self-driving can first be achieved in areas supported by rich data. Level 4 consumer vehicles on the road operating in a hybrid model will continuously gather additional data, laying the foundation for the scalability of Level 4 autonomous driving in other cities, the company said.
DeepRoute.ai plans to accelerate Level 4 commercialization through technology iterations in data collection and analysis, algorithm improvement, simulation and road testing.
Photo: DeepRoute.ai
With a 360-degree view and 200-meter perception range, the fleet offers high-performance Level 4 autonomous driving in an urban environment. The sensors are designed to be less noticeable and part of the auto’s chassis design.
The entirety of DeepRoute.ai’s Robotaxi fleet across Wuhan, Shenzhen, Hangzhou and Fremont, California, now encompasses a variety of models: GAC Aion, SAIC Motor Marvel R, Lincoln MKZ, Geely, Dongfeng Motors E70 and Ford Mondeo.
Stringent testing on both fixed-wing plane and helicopter proves reliability and performance
Honeywell has successfully demonstrated several advanced alternative navigation technologies intended to help ensure seamless navigation, even when GPS signals are blocked, interrupted or unavailable.
Testing took place on both an Embraer E170 aircraft and an AgustaWestland AW139 helicopter.
Alternative navigation systems use sensors such as cameras, star trackers, radars and radios to augment and or aid inertial navigation systems. These systems correct inertial navigation systems in environments where GNSS are denied.
“Our customers are seeing an increase in both intentional and unintentional navigational disruptions, including jamming for GNSS-based navigation,” said Matt Picchetti, vice president and general manager, Navigation and Sensors, Honeywell Aerospace. “There hasn’t been a single set of solutions that meet all our customers’ operational needs, so we decided to create one. Our modular and scalable alternative navigation technologies are setting a new benchmark in terms of reliability and performance in GNSS-denied environments compared with what is available in aviation today.”
Alternative navigation technologies provide vital position, velocity and heading information in GNSS-denied environments. The successfully demonstrated technologies onboard the E170 and AW139 include:
Vision-Aided Navigation. Honeywell’s vision-aided navigation system achieved GPS-like performance on both the Embraer E170 and AW139 platforms during GPS-denied conditions. Additionally, the technology showed 67% improvement in GPS-denied performance compared with earlier testing in 2021. The system uses a live camera feed and compares it with maps to provide a passive, not jammable, and highly accurate absolute position.
Celestial-Aided Navigation. Honeywell’s celestial-aided navigation system on the Embraer E170 achieved an accuracy of 25 meters circular error probability of 50% (CEP50). This represented a 38% improvement in GPS-denied performance compared with tests in 2021. Most importantly, this is the first time a resident space objects-based (RSOs) navigation solution was demonstrated on an airborne platform, as most competing solutions rely only on star-based navigation. The system uses a star tracker to observe stars and RSOs to provide a passive, not jammable solution with GPS-like accuracy in GPS-denied or spoofed conditions.
Magnetic-Anomaly-Aided Navigation. Honeywell conducted real-time magnetic-anomaly-aided navigation on the Embraer E170 airborne platform. This is a historic milestone, as almost all previous magnetic tests were done in special environments to mitigate electromagnetic noise. Honeywell demonstrated this passive, not jammable, all-weather 24/7 technology on an embedded platform, which measures Earth’s magnetic strength and compares it with magnetic maps to accurately identify the position of the vehicle.
Photo: InifiDome
Additionally, Honeywell demonstrated that inertial navigation systems, when paired with the GPSDome (an anti-jamming device), showed significant improvement in position accuracy and integrity performance in the presence of GPS jamming. The ability of GPSDome to enable tracking of GPS satellites under more aggressive jamming environments reduces performance degradations that come with GNSS-denied conditions.
Alternative navigation prototype systems will be available in 2022, with initial deliveries expected to start in 2023.
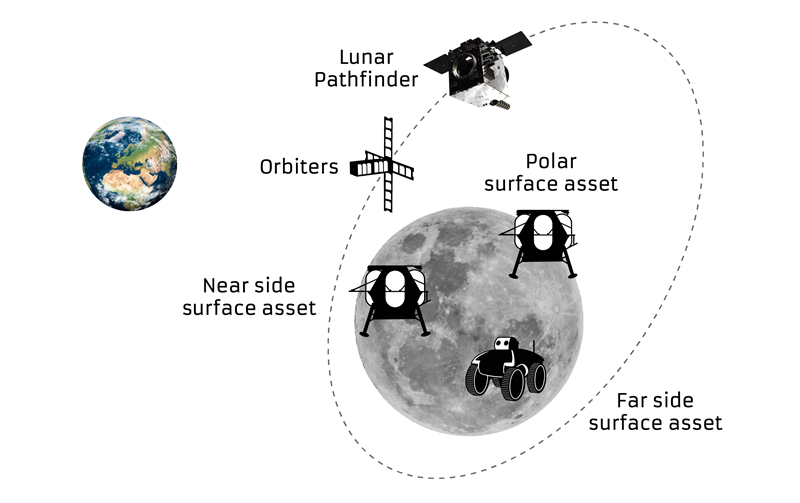
The test version of a unique satellite navigation receiver has been delivered for integration testing on the Lunar Pathfinder spacecraft.
The NaviMoon satnav receiver is designed to perform the farthest ever positioning fix from Earth, employing signals that will be millions of times fainter than those used by smartphones or cars on Earth.
The NaviMoon receiver and low-noise amplifier. (Photo: SSTL)
“This engineering model of our NaviMoon receiver is the very first piece of hardware to be produced in the context of ESA’s Moonlight initiative, to develop dedicated telecommunications and navigation services for the Moon,” explained Javier Ventura-Traveset, head of ESA’s Navigation Science Office and manager of ESA lunar navigation activities.
“It will be flown aboard the Lunar Pathfinder mission into orbit around the Moon, from where it will perform the furthest satellite navigation positioning fix ever made, at more than 400,000 kilometers away to an accuracy of less than 100 meters,” Ventura-Traveset said. “This represents an extraordinary engineering challenge, because at such a distance the faint Galileo and GPS signals it uses will be barely distinguishable from background noise. This demonstration will imply a true change of paradigm for lunar orbiting navigation.”
The washing-machine-sized Lunar Pathfinder is being built as a commercial mission by Surrey Satellite Technology Ltd. (SSTL), in the United Kingdom. ESA is funding guest payloads for it, including the 1.4-kg NaviMoon receiver that will be accommodated beside the spacecraft’s main X-band transmitter that links it with Earth.
“Receiving physical hardware for a mission is always fantastic,” said Lily Forward, SSTL system engineer. “This engineering model receiver will be integrated into our FlatSat Test Bed version of the mission to test that all our systems communicate and work together properly, ahead of receiving the flight-model receiver and antenna later this year.”
This will be SSTL’s first full-fledged mission beyond Earth, she added. “Laying the foundations for numerous scientific missions that will come after it, Lunar Pathfinder is a communications relay satellite, intended to serve assets on both the nearside and farside, orbiting in an elliptical lunar frozen orbit for prolonged coverage over the South Pole — a particular focus for future exploration. Then, during regular intervals, we will orient the spacecraft towards Earth to test out the NaviMoon receiver.”
Satnav position fixes from the receiver will be compared with conventional radio ranging carried out using Lunar Pathfinder’s X-band transmitter as well as laser ranging performed using a retroreflector contributed by NASA and developed by the KBR company.
“This will be the first time these three ranging techniques will be used together in deep space,” explained ESA navigation engineer Pietro Giordano. “There is a long heritage of lunar laser ranging, going back to the Apollo missions, and the retroreflector we are using is an evolution from NASA’s Lunar Reconnaissance Orbiter. The combination of all ranging techniques will improve the orbit estimation further, potentially beyond what radio ranging can achieve.
“In principle, this could mean that future missions could navigate themselves to the Moon autonomously using satellite navigation signals alone with no help from the ground.”
The satnav signals employed here on Earth are already vanishingly faint, equivalent to a single pair of car headlights shining all across Europe. By the time these signals reach the Moon, they have crossed distances of more than 20 times further, attenuating through space like ripples from a stone splashed in water.
“Adding to the difficulty, the satnav constellations are not designed to transmit up into space, but to keep their antennas facing Earth,” Giordano said. “So we are reliant on much weaker side-lobe signals, like light spilling from the sides of a flashlight. To be able to make use of these signals, we turned to a specialist in space-based satellite navigation, whose signal-processing techniques have really proven the magic ingredient.”
Testing the NaviMoon receiver and Low Noise Amplifier engineering models at SSTL ahead of integration testing. The flight models of the receiver and amplifier will be delivered later in 2022. (Photo: SSTL)
SpacePNT, based in Switzerland, oversaw the NaviMoon receiver design. “We began working on the idea of lunar-distance satnav positioning back in 2013 as something of a scientific challenge,” said Cyril Botteron, company head.
“The combination of Galileo dual-frequency signals with those of the existing GPS satellites is what started to make it feasible,” Botteron said. “Although, along with the extreme sensitivity that is demanded, the other big problem is that from the Moon all the satnav satellites are in the same narrow geometry of sky around Earth, periodically rotating out of view.”
Lunar navigation satellites will ultimately help guide Moon landings, such as with the European Large Logistic Lander. (Image: ESA)
The solution that SpacePNT came up with leverages more than half a century of lunar exploration. The company installed a dynamic software model of all the forces acting upon the satellite into the receiver, including the gravitational influences of the Moon, Earth, Sun and planets as well as the very slight push from sunlight itself — solar radiation pressure — along with factors such as clock error and the radio signal direction.
“As we experience a given acceleration the receiver can judge it is most probably at one particular point in its orbit,” Botteron said. “Usually a satnav receiver needs signals from four satellites to fix its position, but with this approach, less than four signals is still enough to obtain useful information, constraining the model to minimize any error drift.”
European Engineering & Consultancy (EECL) in the UK was assigned the task of turning SpacePNT’s design into fully tested hardware, and also designed the crucial low-noise amplifier that sifts through noise to boost usable signals.
BizStation, a database company based in Japan, and u-blox have announced a highly accurate, compact and low-cost high-precision positioning solution for markets in East Asia and Oceania.
Featuring two u-blox modules, the solution delivers centimeter-level positioning accuracy where mobile network service is unavailable, including in maritime offshore surveying, agricultural and industrial vehicle guidance, and UAVs.
BizStation’s precise point positioning (PPP) system covers all territories served by Japan’s Quasi-Zenith Satellite System (QZSS) MADOCA correction service.
The solution leverages the strengths of two u-blox components. The first, a u-blox ZED-F9P multi-band high precision GNSS receiver module, is at the heart of BizStation’s DG-PRO1RWS GNSS receiver.
The second, a u-blox NEO-D9C correction-data receiver module specific to Japan, enables their virtual reference station to receive data on the QZSS L6E-band used by MADOCA.
The PPM (PPP positioning by MADOCA) Android application developed by BizStation then determines the location of the tracked device using the high-precision positioning data transferred via Wi-Fi from BizStation’s DG-PRO1RWS GNSS receiver as well as GNSS correction data from the virtual reference station. The PPM application performs all required calculations using the MADOCA positioning library developed by NEC Solution Innovators Co., Ltd.
The high-precision GNSS solution can be deployed either using a static or a mobile virtual reference station for a wide range of applications such as agriculture, drones, motor sports or surveying systems.
Iris Automation has announced the commercial availability of Casia G, a ground-based version of its detect-and-avoid surveillance solution.
Using the same patented artificial intelligence (AI) and computer-vision technology as Iris Automation’s onboard solutions, Casia G provides 360° optical detection with alerts. It enables operators to avoid both cooperative and non-cooperative aircraft for safe beyond-visual-line-of-sight (BVLOS) flight.
Casia G creates a perimeter of monitored airspace for UAVs to perform work safely, without additional payload. It’s suitable for operations in fixed or temporary locations, supporting drone-in-the-box operations and augmenting or replacing human visual observers. BVLOS flight for unmanned systems has been challenging due to right of way concerns, specifically the inability for unmanned aircraft to successfully see and avoid other aircraft.
“A human has sufficient visual acuity to see airborne traffic only within a +/-5 degree field of view around our focal point. We have to scan the sky, and are frankly not very good at it,” said Jon Damush, CEO, Iris Automation. “Casia G sees the entire sky, with uniform probability and resolution, 10 times per second — without distractions or breaks. This solution for airspace awareness covers a large majority of small UAS use cases, but at a price point that is economically viable and without complex integration.”
Casia G can be expanded by adding additional units in a mesh to create a network of detection nodes for large-area air risk mitigation. The system then provides a single feed of cooperative and non-cooperative air traffic, available to an operator’s traffic management system. This provides a path to approvals for both larger area and one-to-many operations by enabling a holistic view of the airspace, the company said.
Casia G has already obtained a BVLOS waiver on behalf of the City of Reno. Iris Automation is in the process of proving additional deployment patterns and concepts of operation with the FAA.