Counter-unmanned aircraft system (C-UAS) company DroneShield has sold its RfOne MKII long-range sensors to the Australian Army. The capability is being delivered immediately to allow the Australian Army to assess its future counter-drone requirements and options, the company said.
“As an Australian company, DroneShield is immensely proud to support the Australian Army with its long-range counter-drone strategy, said DroneShield CEO Oleg Vornik.
Deployment of the long-range sensors will highlight the flexibility, resilience and capabilities of DroneShield equipment in a dynamic field environment, while also assisting the Australian Army in establishing its counter-drone requirements and future capability options.
The sale, announced July 19, was structured as a one-off sale to the Australian Army. Similar to the standard purchases from DroneShield’s other defence and law enforcement customers, comprises a small purchase of equipment.
Australian counter-unmanned aircraft system (C-UAS) company DroneShield has sold several of its RfOne MKII long-range direction-finding sensors to the Australian Army. The deal, announced July 19. and will “allow the Australian Army to assess its future counter-[UAS] requirements and options”, DroneShield said in a statement, as well as equipping existing platforms with the sensors.
Brazilian Sale
DroneShield also has received formal approval from Anatel, the Brazilian National Telecommunications Agency responsible for issuing the concession of new radio frequencies. Following approval earlier this month, the company has sold a quantity of its DroneGun Tactical units to the Brazilian government.
“Brazil is a large and sophisticated market for military and security equipment, and we are pleased to commence active presence in the country, deploying equipment to the customers,” Vornik said. “We look forward growing our presence in Brazil with the urgent counter-drone requirements mirroring what we are seeing in other countries.”
New Kit
Immediate Response Kit. (Photo: DroneShield)
DroneShield also released its Immediate Response Kit (IRK), a rapidly deployable C-UAS detection and defeat kit. The IRK consists of an RfPatrol portable (1.2 kg/2.6 lbs incl battery) detection device and a DroneGun MKIII (2.1 kg/4.7 lbs including battery) defeat device in a rugged carry case.
Both RfPatrol and DroneGun MKIII are currently fielded by military and government customers globally.
PUB QUIZ QUESTION:Who was Jean-Baptiste Alphonse Karr? He was a 19th-century French critic, journalist and novelist. He was at one time the editor of Le Figaro, the French daily newspaper. But he is most commonly known for the quotations from his works including the aphorism plus ça change, plus c’est la mêmechose commonly translated as “the more things change, the more they stay the same.” But what has this to do with GNSS you might ask?
One of the major sources of error in GNSS positioning is the ionosphere. As I have written in the Springer Handbook of GNSS, “[t]he ionosphere is that region of the Earth’s atmosphere in which ionizing radiation (principally from solar extreme ultraviolet (EUV) and x-ray emissions) cause electrons to exist in sufficient quantities to affect the propagation of radio waves. It extends from about 50 to 1000 km or more, above which we have the plasmasphere (also known as the protonosphere).” While GNSS technology has advanced over the years, Mother Nature stays pretty constant in the long term (global warming notwithstanding). And so the ionosphere is still a factor controlling the accuracy of single-frequency GNSS positioning as it has been for the past 40 years or more. The GPS navigation message includes values of the parameters of a simple ionospheric model known as the broadcast or Klobuchar model, named after its developer Jack Klobuchar. This model permits an estimate of the zenith ionospheric delay to be computed at a receiver’s location at a particular time of day and is driven by recent solar conditions as interpreted by the GPS control segment. The other GNSS use similar approaches in an attempt to reduce the positioning error of single-frequency positioning.
But the ionosphere is also an issue for dual- or multi-frequency positioning. Yes, the ionosphere is a dispersive medium so that by linearly combining simultaneous measurements (either pseudoranges or carrier phases) on two frequencies such as the GPS L1 and L2 frequencies, an observable virtually free of ionospheric effects can be constructed and used for position determinations. And high-accuracy positioning, particularly with carrier-phase observations, is possible with a relatively short period of observations using relative or differential positioning. However, the technique of precise point positioning or PPP requires tens of minutes or more of continuous carrier-phase observations to approach an accuracy level of a few centimeters — the well-known convergence problem of PPP. Back in 2014, Simon Banville, one of my former Ph.D. students, demonstrated that ionospheric corrections could be used to reduce the convergence time of PPP to 10-cm horizontal accuracies from about 30 minutes to a few minutes. This approach has drawn the attention of the positioning industry, which is looking into several aspects of its use including questions about the level of accuracy that can be achieved depending on the state of the ionosphere, the latency of corrections supplied in real-time PPP, as well as the location and coverage of the network of stations required to determine the corrections.
In this month’s article, researchers at Stanford University and Hexagon Positioning Intelligence team up to help answer these questions.
By Todd Walter, Juan Blanch, Lance de Groot and Laura Norman
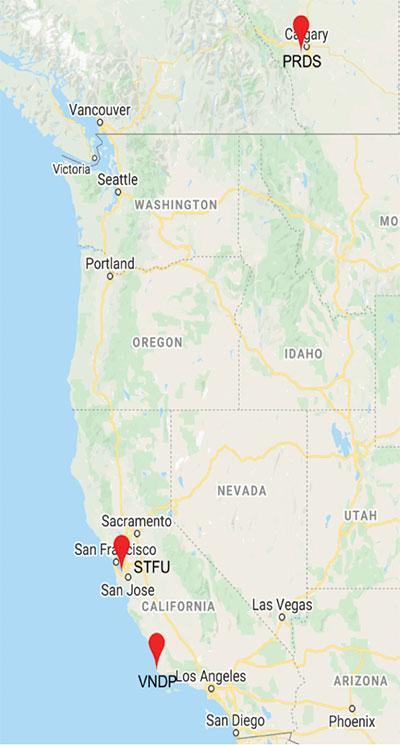
Figure 1. The three station locations. (Image: Authors)
Hexagon is investigating the utility of applying ionospheric corrections to decrease the overall convergence time of the precise point positioning (PPP) filter. Stanford University has conducted several analyses on the accuracy of these ionospheric corrections over the course of the past two years. Stanford has created MATLAB tools to process data from multiple days and locations as well as to investigate intervals with larger disagreements between the raw ionospheric measurements and the provided corrections. In addition, the tool can apply varying magnitudes of latency to examine its effect on correction accuracy and error bounding.
The current study was performed using data from April 12–May 9, 2020. These days exhibit typical ionospheric behavior for a solar minimum period. Hexagon provided 1-Hz correction data for three International GNSS Service (IGS) sites to evaluate its accuracy:
Stanford University (IGS 4-letter identifier: STFU), 1-Hz data
Vandenberg Space Force Base (VNDP) in southern California, measurements at every 15 seconds
Priddis, Alberta, Canada (PRDS), measurements every 30 seconds.
These sites were chosen because they tend to have high volumes of good quality data and are covered by the ionospheric correction service.
The provided corrections were specifically calculated for the three selected reference sites. They include corrections for both GPS and GLONASS satellites. We downloaded RINEX data for the three sites for all 28 days from IGS. FIGURE 1 shows the locations of the three sites.
PROCESSING METHODOLOGY
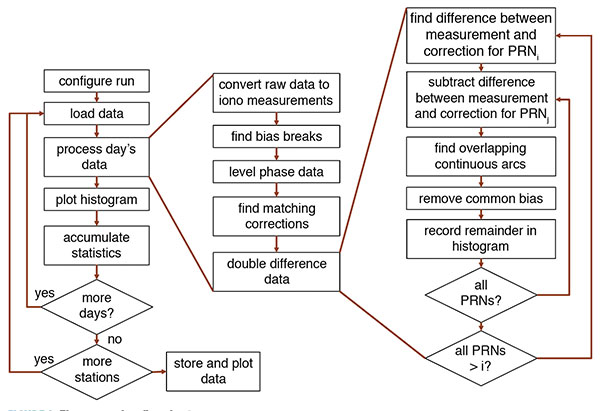
The residual errors were determined by comparing the measured ionosphere to the corrections for all satellites. These differences contain a common mode effect due to the changing inter-frequency biases that are part of the corrections. We formed double differences for all satellite pairs (within each constellation) that have measurements and corrections present at the same time. For each such pair, the continuous tracks are determined, and a constant offset for each continuous track is subtracted to obtain the final residual error. This process is illustrated in the flowchart shown in FIGURE 2 as well as in the following example.
Figure 2. The processing flowchart. (Image: Authors)
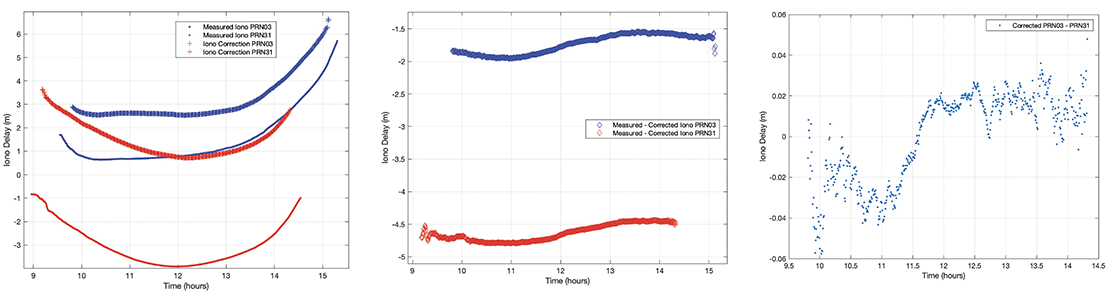
FIGURE 3 shows the raw ionospheric measurements for GPS satellites with pseudorandom noise codes (PRNs) 3 and 31. The blue plus signs use the L2-frequency minus L1-frequency code-measurement difference divided by (γ–1) where γ is the square of the ratio of the L1 and L2 carrier frequencies (𝑓12/𝑓22≅1.65). The green circles are the L1 code minus the L1 carrier divided by two, and the red dots are the L1 minus L2 carrier measurement difference divided by (γ–1). The different measurements are formed to help identify erroneous measurements that might corrupt the evaluation. Fortunately, the vast majority of the measurement data is well behaved. The traces shown in Figure 3 are all self-consistent and indicative of valid measurement data. The carrier-phase difference measurements are then used in the remainder of the processing, as these have the least amount of measurement noise.
Figure 3 Raw ionospheric measurements for GPS PRNs 03 (left) and 31 (right). (Image: Authors)
On the left side of FIGURE 4, we present the carrier phase ionospheric delay measurements of PRNs 3 and 31 alongside their corresponding corrections. The middle section of the figure shows the differences between measured and estimated correction values for each satellite. Notice that there are common mode drifts that span ~50 centimeters for this example. The right side of Figure 4 shows the difference between the two curves in the middle portion. This double difference is the difference between these two corrected satellites for the periods of time that they are simultaneously observed by each reference station. For each continuous double-difference track (that is, it has no detected bias break), we subtract the mean value (provided that the track spans at least four minutes). We examine this residual error in meters and the normalized residual error where we divide by the root-sum-square of the provided correction 1σ values. The process begins by comparing PRNs 1 and 2, then comparing PRNs 1 and 3 and so on until PRN 31 has been compared to PRN 32. We then repeat the same process for the GLONASS PRNs.
Figure 4. Ionospheric measurements and corrections for GPS PRNs 3 and 31 (left), differences between the measurements and corrections (middle) and double differences between the satellite pair (right). (Image: Authors)
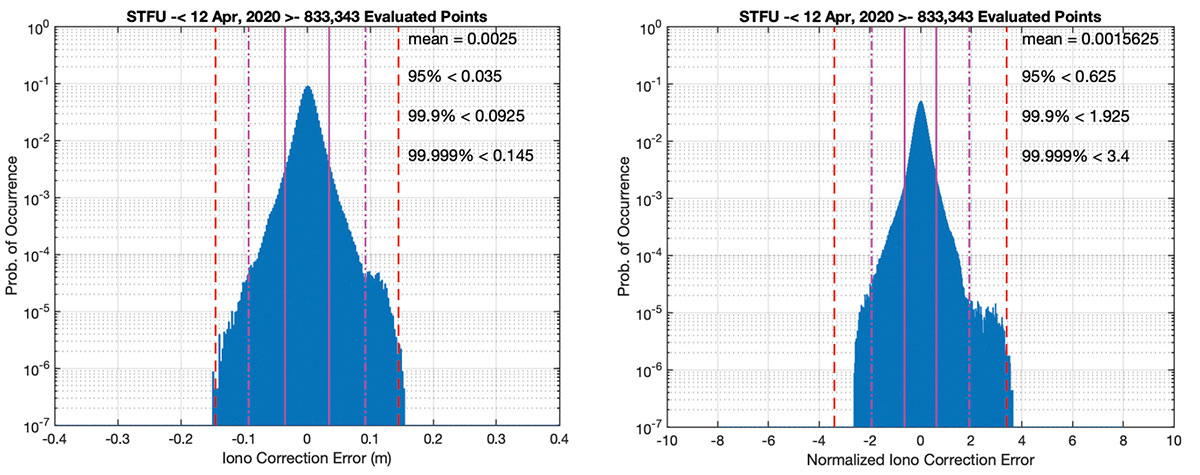
These values are put into histograms, and the 95%, 99.9% and 99.999% quantiles are determined for each metric. These are calculated on a daily basis across all satellite pairs as well as aggregated over multiple days and stations. By comparing different quantile behaviors, we can see whether the full distributions are close to Gaussian (well behaved) or if they have outliers that create large tail values (poorly behaved). FIGURE 5 shows the histograms of data for the Stanford University station for the first day analyzed.
Figure 5. Histogram of double-differenced residual error at Stanford (left) and normalized error (right). (Image: Authors)
As can be seen, the data is very well behaved (the histograms are plotted on a semi-log scale to emphasize the performance of the tails). If the data strictly followed a Gaussian distribution, we would expect that about 95% of the values would fall within 2σ, 99.9% within 3.29σ, and 99.999% within 4.42σ where σ is the standard deviation of the distribution. Often, similar data would have much wider tails and include many outliers; however, this data has only slightly wider tails than would be expected for a Gaussian distribution. The double difference includes the noise from two sets of measurements and two different corrections. The values in the right side of Figure 5 should be divided by the square root of 2 to assess the magnitude of error affecting just one satellite. The values on the left histogram use the square root of the sum of the variances associated with the corrections, so no similar adjustment is required there.
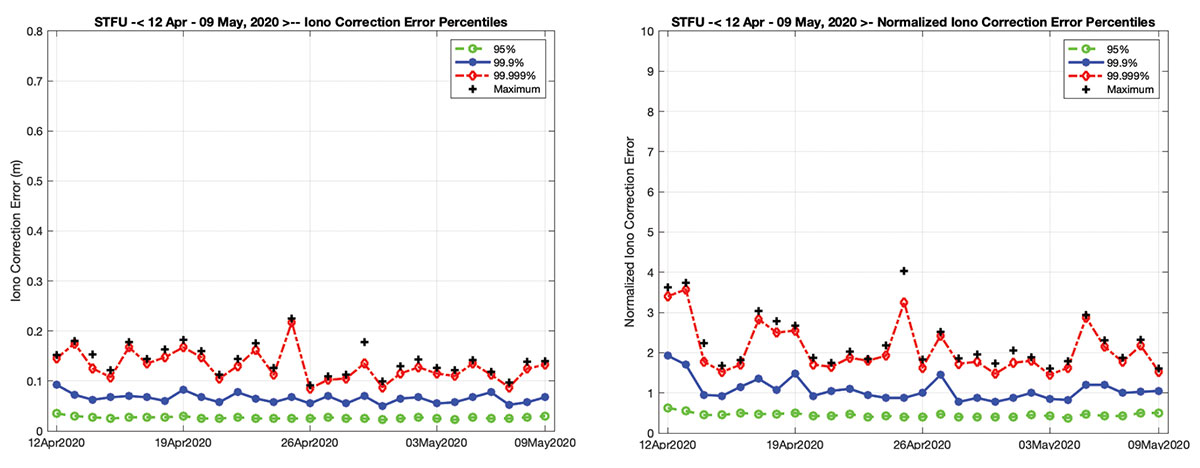
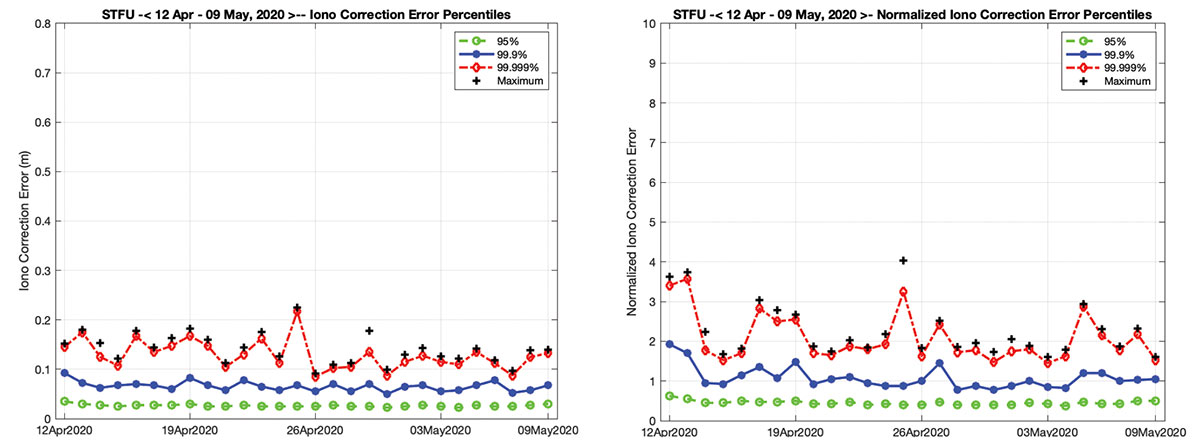
FIGURE 6 shows the results of evaluating the Stanford station over all 28 days. Here the 95%, 99.9%, 99.999% and maximum values are shown for each individual day. The 95% values are fairly consistent over the 28-day period, but there is more variability in the tails of these distributions. The same data was analyzed for Vandenberg and for Priddis. The errors are largest for Vandenberg, which is situated near the edge of coverage for the corrections, with a maximum value above 35 centimeters. Priddis has the smallest errors with a maximum value below 20 centimeters, likely due to good network coverage and smaller ionospheric delays nearer to the Earth’s polar regions.
Figure 6. Ionospheric corrections accuracy quantiles for GPS and GLONASS at Stanford April 12–May 9, 2020. Ionospheric delay double-differenced residuals (left) and normalized values (right). (Image: Authors)
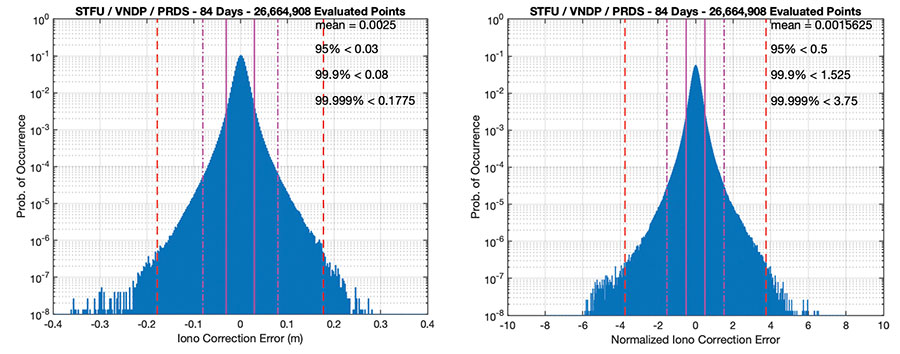
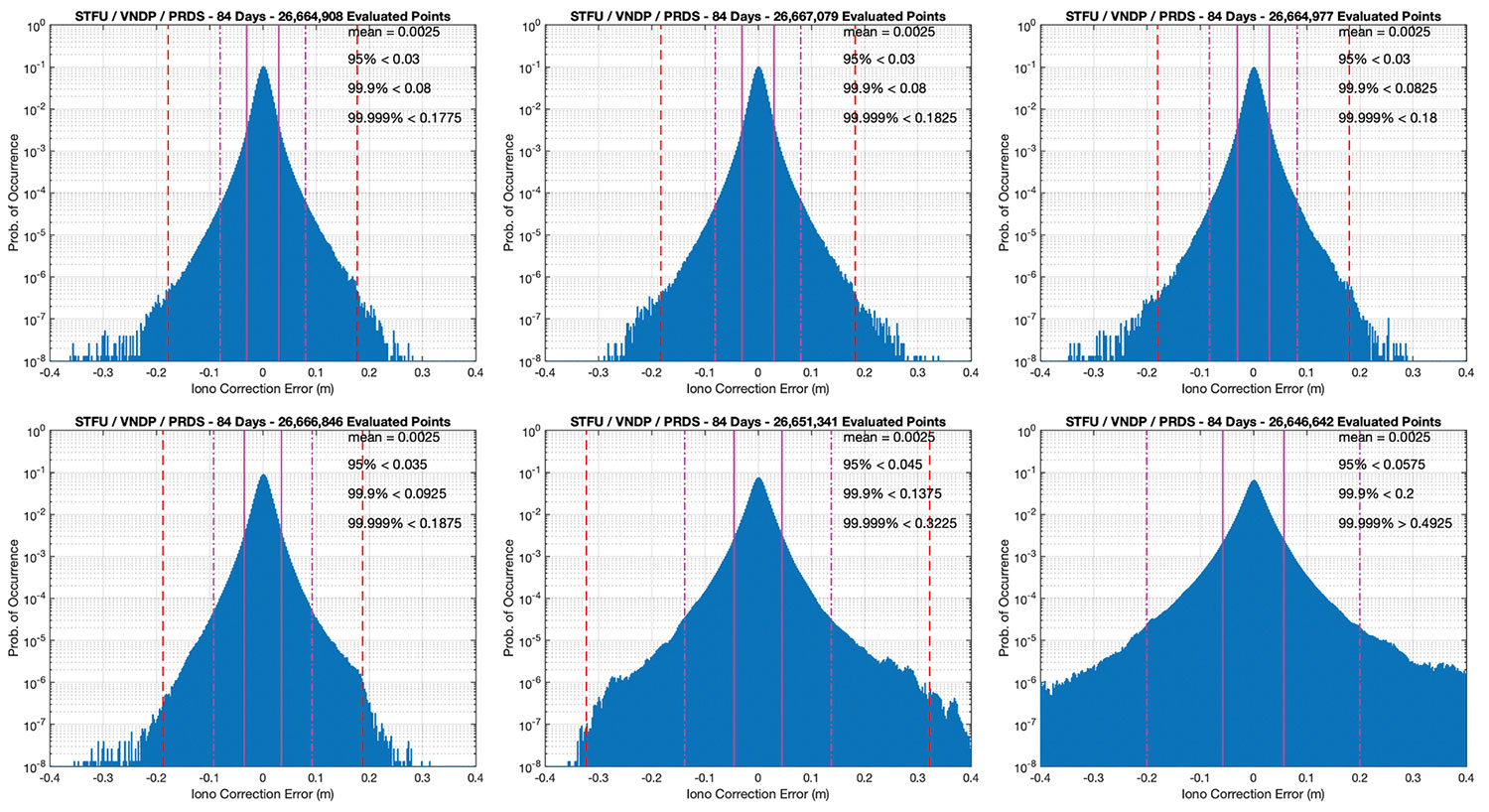
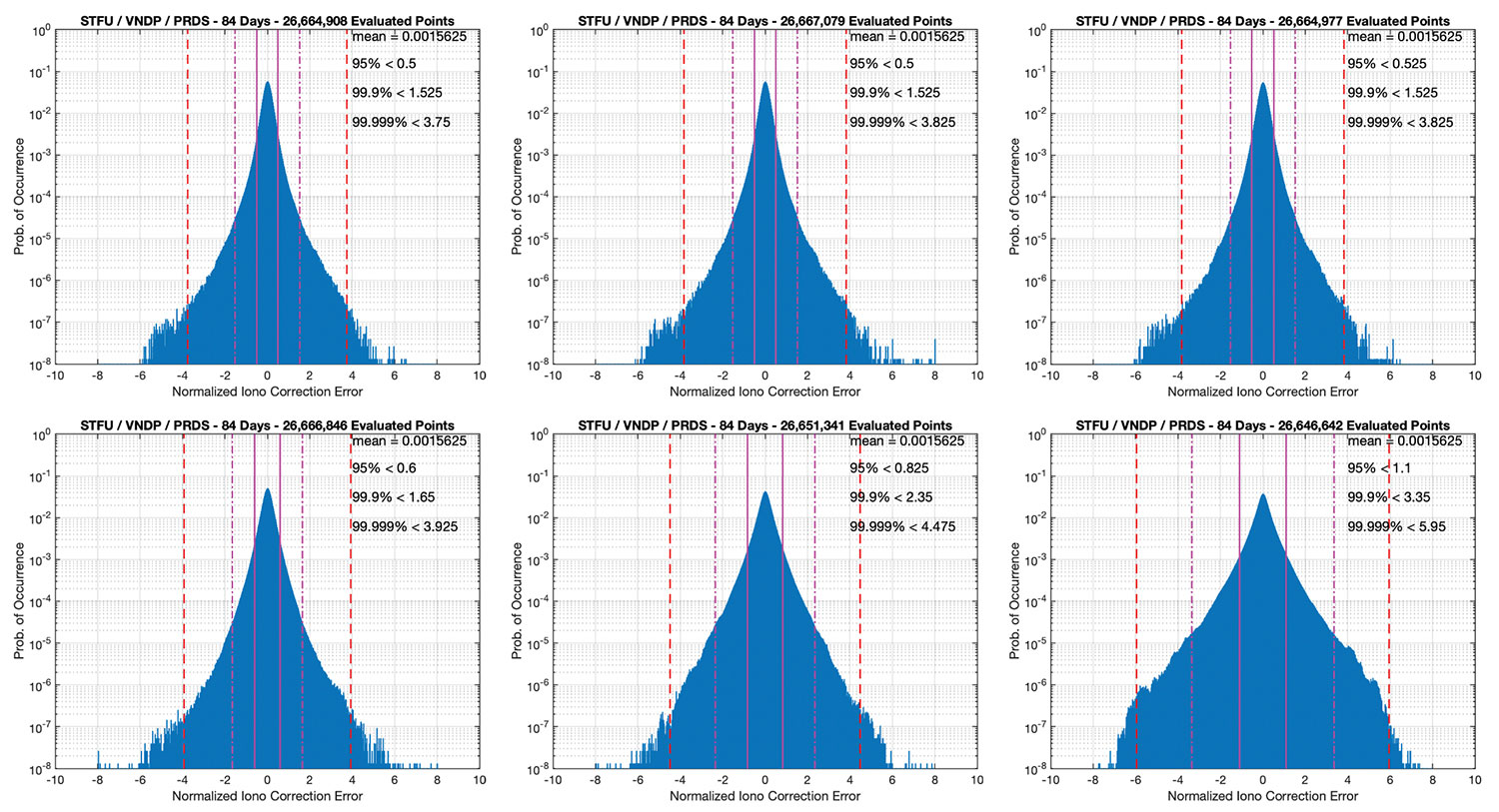
FIGURE 7 shows the aggregate histograms for all of the data across the three stations for the full 28 days. Note that the84-days reference in the figure headers refers to station-days (28 × 3). The accuracy of these corrections for the vast majority of the data remains quite impressive; the 95% value indicates a 1σ accuracy of ~1 centimeters (3 centimeters/(2√2)). The higher quantiles indicate slightly larger values due to the wider tails of the distribution with the 99.9% indicating a 1σ of ~1.7 centimeters (8 centimeters/(3.29√2)) and the 99.999% indicating a 1σ of ~2.9 centimeters (18 centimeters/(4.42√2)). The provided error bounds are conservative for most of the data. For 95% they are four times larger than necessary, and for 99.9% two times larger. However, by 99.999%, they are only 10% larger than strictly necessary and are insufficient for even smaller probabilities. This highlights the larger tail behavior and that the error bounds, which are currently only a function of elevation angle, should be updated to reflect more information about the transformation of the reference measurements into the estimate of ionospheric delay. Corrections near to the edge of coverage or that make use of fewer or less accurate measurements would be expected to have larger error bounds.
Figure 7. Ionospheric correction histograms for GPS and GLONASS at all three sites April 12–May 9, 2020. Ionospheric delay double-differenced residuals (left) and normalized values (right). (Image: Authors)
KLOBUCHAR CORRECTIONS
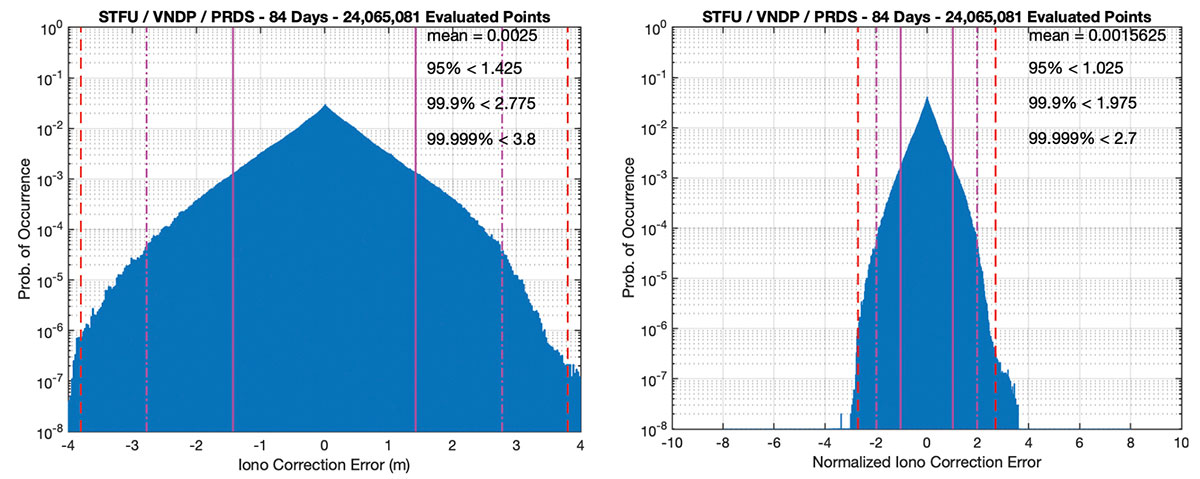
We are currently at a solar minimum period, and the ionospheric delays are both smaller and smoother than are typically experienced during other phases of the ionospheric solar cycle. To demonstrate that the corrections are accurately following the ionospheric behavior, and that the demonstrated accuracy is not merely a reflection of an extremely smooth ionosphere, we repeated the same process using the single-frequency global ionospheric model broadcast by the GPS satellites. This model is commonly referred to as the Klobuchar model after its developer. FIGURE 8 uses the same measurement data as Figure 7, but now the corrections are replaced with the Klobuchar model from each day and the error bound is set to a constant 1 meter 1σ value. As can be seen, the error magnitude is significantly increased to values of 50–60 centimeters 1σ. Thus, the provided corrections are accurately following the ionospheric behavior to within a few centimeters, and the actual variations in the ionosphere are more than an order of magnitude larger.
Figure 8. Klobuchar correction histograms for GPS and GLONASS at all three sites April 12–May 9, 2020. Ionospheric delay double-differenced residuals (left) and normalized values (right). (Image: Authors)
To examine the changes in ionospheric variability over the solar cycle, we examined four eastern stations during a significant ionospheric disturbance on Oct. 29, 2003. These stations are in Bermuda; Greenbelt, Maryland; Santiago de Cuba, Cuba; and Washington, D.C. They experienced very large ionospheric gradients during that event. FIGURE 9 shows similar data for the four stations from that day. Note that, again, the figure headers refer to station-days and the x-axis for each graph had to be expanded to include all the errors. Here the errors are between 2.8 and 7.4 meters 1σ.
Figure 9. Klobuchar correction histograms for GPS and GLONASS at four sites on Oct. 29, 2003. Ionospheric delay double-differenced residuals (left) and normalized values (right). (Image: Authors)Ionospheric delay double-differenced residuals (left) and normalized values (right).
EFFECTS OF LATENCY
We are able to configure the tool to implement different levels of latency for the corrections. This is configured as a minimum age for the corrections before they can be applied to the measurements. In all cases, the maximum age of the data beyond the initial latency value was set to 30 seconds. For example, when set to 60 seconds of latency, corrections had to be at least 60 seconds old to apply to the current epoch. If no correction existed that was between 60 and 90 seconds old, then the measurement would not be corrected.
FIGURES 10 and 11 show results for this latency study. The top row of each corresponds to 0, 30 and 60 seconds from left to right. There was surprisingly little effect for this range of latencies, most likely due to the benign ionosphere during the current solar minimum period. The accuracy quantiles increased only by less than half of a centimeter over this period. The normalized errors saw somewhat larger growth, but the sigma values are still appropriately bounding the errors. The bottom rows correspond to 120, 240 and 360 seconds of latency, from left to right. Here we begin to see more effect from latency; the residual error is doubled by 360 seconds. Between 240 and 360 seconds, the 99.999% normalized residual error exceeds 4.42, which corresponds to the expected Gaussian value. We can also see more outliers beyond 6σ.
Figure 10. Histograms showing the double-difference residual accuracy for differing amounts of latency. (From left) Top row: 0, 30 and 60 seconds. Bottom row: 120, 240 and 360 seconds.Figure 11. Histograms showing the normalized double-difference residual accuracy for differing amounts of latency. (From left) Top row: 0, 30 and 60 seconds. Bottom row: 120, 240 and 360 seconds.Bottom row: 120, 240 and 360 seconds. (Image: Authors)
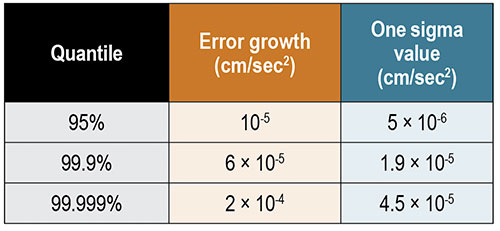
We fit the quantiles vs. the latency times and found a strong quadratic dependence. TABLE 1 shows the resulting growth rates for the overall error and the 1σ values for each quantile. For the observed level of ionospheric activity, we recommend adding an increase to the 1σ confidence value as a function of the age of the correction. We recommend an added value of 4.5 × 10-5 centimeters/second2; thus, after 200 seconds, the 1σ value should be increased by 1.8 centimeters. However, for solar maximum periods and during significant ionospheric disturbances, we feel that this error bound will need to be increased, perhaps significantly. This error-bound term should be linked to the state of the ionosphere.
The correction accuracy is generally quite good, with 95% daily values almost always below 4 centimeters and below 6.25 centimeters overall. There are, however, outliers that affect the daily 99.9% and 99.999% percentiles, particularly at Vandenberg, which is toward the edge of the correction coverage region. The provided error bounds are mostly conservative, but there were still some occasional outliers. These error bounds should be more than simply functions of elevation angles. They should include real-time updates on the state of the ionosphere and quality of the correction based on the input measurements.
We evaluated the effects of latency and found that during this solar minimum period, fairly long latency times (up to 120 seconds) showed little impact on performance. It was not until more than 240 seconds that the sigma values stopped adequately bounding the tails and the overall accuracy degraded appreciably. We advocate including a quadratic term to the error bound to account for the age of the correction. During solar minimum time, we observed that this term can be quite small (4.5 × 10-5 centimeters/second2), but anticipate it needing to be significantly larger during times of ionospheric disturbance.
ACKNOWLEDGMENT
This article is based on the paper “Assessment of Ionospheric Correction Behavior for Use with Precise Point Positioning (PPP)” presented at the virtual 2021 International Technical Meeting of The Institute of Navigation, Jan. 25–28, 2021.
TODD WALTER is a research professor in the Department of Aeronautics and Astronautics at Stanford University. He received his Ph.D. in applied physics from Stanford in 1993.
JUAN BLANCH is a senior research engineer at Stanford University, where he works on integrity monitoring algorithms for radionavigation. He received a Ph.D. in aeronautics and astronautics from Stanford in 2003.
LANCE DE GROOT works for Hexagon Positioning Intelligence, Calgary, Alberta, Canada, in the Safety Critical Systems Group. He holds a B.Sc. and an M.Sc. in geomatics engineering from the University of Calgary.
LAURA NORMAN works for Hexagon Positioning Intelligence in the Safety Critical Systems Group. She obtained her B.Sc. and M.Sc. in geomatics engineering from the University of Calgary.
CICERO-2 satellites will track Earth’s atmosphere, water, surface and interior
Remote sensing company GeoOptics Inc. has upgraded its CICERO constellation of satellites that measure the Earth’s climate. With launches beginning next year, CICERO-2 will form a unified Earth observatory allowing governments, industry and individual stakeholders to monitor and prepare for the impacts of climate change.
“In today’s environment, in which precision Earth sensing is becoming ever more critical, GeoOptics is deploying a flexible observatory made up of dozens of small satellites,” said Alex Saltman, Chief Executive Officer of GeoOptics. “The real time services will satisfy a broad range of needs for government and civil users around the world.”
The first CICERO-2 satellites launched are designed to achieve key milestones in small satellite Earth observation, including:
Advanced GNSS reflectometry (GNSS-R). Advanced GNSS-R measures many phenomena near Earth’s surface, including ocean winds, flooding, land cover (snow, ice, vegetation), soil moisture and topography by means of reflected GNSS signals. NASA’s recent CYGNSS mission demonstrated the broad utility of the GNSS-R technique. GeoOptics is working with NASA’s Jet Propulsion Laboratory (JPL) to deploy an advanced operational version, offering dramatically enhanced performance in a small, low-cost package. This collaboration is funded jointly by GeoOptics, the U.S. Air Force, and NASA.
Triple radio occultation (GNSS-RO). GNSS-RO enables Profiling of atmospheric temperature, pressure, density and other key properties. First proposed by company founder Tom Yunck while he was at JPL, GNSS-RO offers extreme measurement precision and is an essential contributor to global weather forecasting. The CICERO-2 satellites will yield three times the data volume of their predecessors and many times the volume.
Global precipitation watch. The CICERO-2 satellites will monitor heavy precipitation using polarimetric radio occultation (RO), an advanced remote sensing technique pioneered by GeoOptics’ collaborators at JPL and the Spanish PAZ mission.
Measuring weather changes
For GeoOptics’ strategic partner Climavision, a weather data provider, these innovations will enable customers to manage significant risks in a time of global change. “With these new developments in remote-sensing technologies from GeoOptics, we’ll be able to further enhance our climate and weather prediction capabilities,” said Chris Goode, CEO and co-founder of Climavision. “Through the combination of advanced RO profiles, GNSS-R data about surface conditions and our proprietary gap-filling radar network data, we’ll help customers in weather-sensitive industries see weather like never before and give them the tools and data to make informed critical decisions.”
GeoOptics will later extend the system to a range of new applications, including precise mapping of Earth’s gravitational field, which has been named a top NASA Earth science priority for the next decade. This measurement shows the imprint of climate-related movement of water and other key changes in the Earth.
With internal investment and nearly $4 million from NASA, GeoOptics has devised a unique system architecture for daily gravity mapping with clusters of small satellites. This patented technique promises to improve gravity sensing 20-fold over current methods at a fraction of the cost.
Under the umbrella of the National Oceanographic Partnership Program (NOPP), GeoOptics is also designing a radar instrument to observe ocean vector winds, topography, soil moisture and a variety of other surface properties with patented multi-satellite radar techniques. NOPP is seeking to sponsor a trial flight of GeoOptics’Cellular Ocean Altimetry/Scatterometry Technology (COAST) within the next two years.
Tom Yunck, GeoOptics’ Chief Technology Officer, said, “These advanced remote sensing applications – from basic RO to advanced radar and gravity mapping – exploit shared micro technologies that fit in the palm of one’s hand. Each new function builds naturally upon the previous, yielding prodigious observing capacity in a low-cost system of great simplicity and reliability.”
“CICERO-2 is designed to help provide high-priority NOAA climate and weather monitoring observations, as ranked by the NOAA Space Platform Requirements Working Group (SPRWG),” said Conrad C. Lautenbacher (Vice Admiral, USN ret.), executive chairman of GeoOptics and former National Oceanic and Atmospheric Administration (NOAA) administrator. “It can also play a key role in supporting crucial Defense Department satellite weather data requirements.”
GeoOptics’ CICERO satellites continue to provide precise global profiles of the Earth’s atmosphere. In February, NOAA selected GeoOptics to provide the first commercial satellite data to be included in its operational forecasts.
In 2020, GeoOptics was selected by NOAA to lead an end-to-end design study for its next-generation low-orbiting weather satellite system, planned to come online later this decade, building in part on RO and GNSS-R technologies.
The Navigation Technology Satellite-3 (NTS-3) program is making major strides in developing a new navigation spacecraft for in-space demonstration. The NTS-3 is scheduled to launch to geosynchronous orbit from Cape Canaveral in 2023.
This summer, Northrop Grumman Corp. delivered the ESPAStar-D spacecraft bus to L3Harris Technologies of Palm Bay, Florida.
“The transfer of the bus allows L3Harris to move forward building the NTS-3 spacecraft,” said 2nd Lt. Charles Schramka, the program’s deputy principal investigator. “L3Harris will perform tests and begin integrating the NTS-3 PNT payload onto the bus. Together the bus and payload will form the NTS-3 spacecraft.”
Following L3Harris’s work, the Air Force Research Laboratory (AFRL) will test the bus with the NTS-3 ground control and user equipment segments, and will perform its own integrated testing on the overall NTS-3 system architecture.
Northrop Grumman has successfully delivered an ESPAStar-D spacecraft bus to L3Harris in support of the NTS-3 mission. (Photo: U.S. Air Force)
NTS-3 in the Vanguard. In 2019, the U.S. Air Force designated NTS-3 as one of three Vanguard programs — priority initiatives to deliver new capabilities for national defense. The NTS-3 mission is to advance technologies to responsively mitigate interference to position, navigation and timing (PNT) capabilities, and increase system resiliency for GPS military, civil and commercial users.
“This is the first time an ESPAStar bus has been built and delivered as a commercially available commodity,” said Arlen Biersgreen, NTS-3 program manager. “NTS-3 is using a unique acquisition model for the ESPAStar line that fully exercises the commercial nature of Northrop Grumman’s product line, in order to provide the bus to another defense contractor for payload integration using standard interfaces.”
The ESPAStar-D bus, built in Northrop Grumman’s satellite manufacturing facility in Gilbert, Arizona, includes critical subsystems such as communications, power, attitude determination and control, in addition to configurable structures to mount payloads.
The bus will “provide affordable, rapid access to space,” according to Northrop Grumman. Its configuration, using an Evolved Expendable Launch Vehicle (EELV) Secondary Payload Adapter (ESPA), allows multiple separate experimental payloads to be stacked together on one launch vehicle. AFRL developed the ESPA ring to transport space experiments, allowing for lower cost and more frequent trips to space for government and industry users.
Besides the bus delivery, there are other advances in the program.
GNSSTA receiver. In June, AFRL took delivery of an experimental receiver — GNSS Test Architecture (GNSSTA). The receiver was developed by the AFRL unit the Sensors Directorate, located at Wright-Patterson Air Force Base in Ohio, and Mitre Corporation. GNSSTA is a reprogrammable software-defined signal receiver that will allow the Air Force to receive both legacy GPS and advanced signals generated by NTS-3.
AFRL will continue its integration efforts through 2022 to ensure all parts are working together for the fall of 2023 NTS-3 launch.
“With the delivery of the bus we are entering into the next phase of payload integration,” Biersgreen said. “These recent breakthroughs allow the program to continue to move forward and prepare for launch of the first U.S. integrated satellite navigation experiment in over 45 years.”
Artist’s concept for NTS-3 in geostationary orbit. (Artist’s concept: 2d Lt. Jacob Lutz, AFRL)
Lt. Gen. John F. Thompson, commander of the Space and Missile Systems Center (SMC), will retire Aug. 1. A ceremony celebrating his career and achievements took place July 27 at Los Angeles Air Force Base, California, where SMC is based.
Thompson, who is the longest serving three-star commander for SMC, retires after a 36-year career with the U.S. Air Force, having served in various roles leading defense acquisition programs, strategic systems and lifecycle management.
Brig. Gen. D. Jason Cothern, current vice commander of SMC, will serve as the SMC commander while the center awaits a confirmation of a three-star general officer.
SMC includes the positioning, navigation and timing (PNT) mission, in which professionals acquire, deliver and sustain reliable GPS capabilities to America’s warfighters, allies and civil users.
“Lt. Gen. Thompson’s exemplary career has made the nation safer, stronger and better secured against an increasingly contested space environment, and earned the well-deserved opportunity to enjoy this next chapter in his life,” stated a press release from SMC.
As the commander of SMC, he led more than 6,300 military, government service and contract employees nationwide, and oversaw an annual budget of $9 billion, which accounts for 85 percent of the nation’s space budget.
In the past 18 months, Lt. Gen. Thompson tirelessly led the groundwork for the stand-up of the U.S. Space Force’s newest Field Command, Space Systems Command, which will lead the Force in the development, delivery and acquisition of innovative space warfighting capabilities.
Having completed his four-year tour as the SMC commander, his retirement will not affect the timeline of the SSC stand-up — a complex process requiring activities and approvals at the highest levels before implementation.
Orolia Defense & Security delivers M-code-enabled timing and synchronization to Lockheed Martin
In September 2019, Lockheed Martin was awarded a contract to develop the U.S. Army’s Sentinel A4 radar system, an air and missile defense radar that will provide improved capability against dynamic threats.
The following November, Orolia Defense & Security announced the availability of M-code military GPS receivers in its flagship SecureSync — the first time server approved by the Defense Information Systems Agency.
Orolia is supplying SecureSync units for Lockheed Martin’s Sentinel A4 radar. (Photo U.S. Army)
This May, Orolia delivered a shipment of M-code-enabled SecureSync mission timing and synchronization units to Lockheed Martin, marking a key milestone for the Army program. SecureSync with M-code provides enhanced resilient positioning, navigation and timing (PNT) capabilities and improved resistance to existing and emerging GPS threats, such as jamming and spoofing.
Lockheed Martin selected Orolia’s SecureSync M-code as the A4 system’s resilient time and frequency reference solution in part due to its modular, open architecture – the same characteristics that are the cornerstone of the radar’s design – making integration a simple process and ensuring future upgrades.
“As a trusted Lockheed Martin partner, Orolia is proud to support the development of the Sentinel A4, which will be a key asset to our warfighters for decades to come,” said Hironori Sasaki, president of Orolia Defense & Security. “Making M-code available now in a readily configurable and scalable form factor is a critical step in advancing our forces out in the field, whether in the air or on the ground,” Sasaki added.
The next-generation of U.S. military systems are fortified with M-code, and Orolia leads the industry in M-code solutions for navigation warfare (NAVWAR) environments.
Orolia is supplying SecureSync units for Lockheed Martin’s Sentinel A4 radar. (Photo U.S. Army)Image: Orolia
Oceaneering International Inc. and DDK Positioning Limited have entered into an agreement for the provision of GNSS augmentation service and all associated software and hardware supporting Oceaneering’s C-Nav Positioning Solutions group offerings.
Oceaneering provides engineered services and products primarily to the offshore energy industry. C-Nav uses precise point positioning corrections with worldwide accuracy of better than 5 cm horizontally and 15 cm vertically.
DDK Positioning’s services are delivered through the Iridium satellite communications network coupled with hardware developed by partner Topcon. This pairing will enhance the ability of Oceaneering’s customers to precisely position their assets globally. The unified solution offers several benefits to Oceaneering’s positioning customers, such as two-way communication enabling machine control and feedback, and redundancy to cover potential signal losses.
From launch, DDK Positioning will provide its MAX service to Oceaneering clients, which can achieve accuracy to less than 10 cm (2 sigma). The MAX service uses GPS, Galileo, and GLONASS constellations with further systems to be added within a year.
“Significant advances have been made in communications infrastructure and satellite positioning technology over the last several years,” said Eric Smith, director of Survey Services at Oceaneering. “With this agreement, Oceaneering will be able to offer enhanced positioning technology allowing us to build on our strong industry track record while continuing to serve the positioning needs of our clients now and into the future.”
“We are absolutely delighted to have signed an agreement with Oceaneering to provide our precise and reliable GNSS positioning solution to Oceaneering’s customers in the maritime energy industry,” said Kevin Gaffney, CEO at DDK Positioning. “This agreement demonstrates the need for an alternative GNSS augmentation service that increases the reach of services from pole to pole, with the added benefit of Iridium’s resilience and reliability.”
Successful eLoran field trial using ADVA’s OSA 5420 Series demonstrates same accuracy and stability as GPS with much-improved resilience
UrsaNav and ADVA have conducted an enhanced long-range navigation (eLoran) field trial using UrsaNav’s eLoran receiver and ADVA’s Oscilloquartz grandmaster clock technology. The successful demonstration shows that eLoran offers a robust and reliable backup for GPS and other GNSS, and could be used to provide an assured position, navigation and timing (PNT) service.
The trial follows U.S. PNT Executive Order 13905 aimed at strengthening national resilience through PNT services, including protecting critical infrastructure such as electrical power grid and communication networks from rising cyber threats. By harnessing ADVA’s flexible OSA 5420 series, designed with assured PNT (A-PNT) technology, UrsaNav has shown that eLoran can provide a new layer of protection and significantly boost timing resilience and security.
“The success of this field trial demonstrates how eLoran, as part of ADVA’s assured PNT solution, can serve as a crucial backup for GPS,” said Charles Schue, CEO, UrsaNav. “We have shown how our technology enables ADVA’s grandmaster clock to receive UTC timing from the eLoran system for a period of several days with the same accuracy and stability as GPS. Of course, this capability is extensible to other GNSS as well. eLoran is far less vulnerable to unintentional jamming and spoofing disruptions or intentional attacks, thereby delivering nanosecond precision with even more resilience.”
“By partnering with ADVA, we’ve been able to show that our eLoran receiver interoperates with the best network timing toolkit available,” Schue said. “The OSA 5420 Series is a great product — highly efficient and easy to operate. Together with ADVA, we’re paving the way for tomorrow’s more robust assured PNT synchronization architecture. Now that UrsaNav has demonstrated the power of our OSA 5420 Series to utilize eLoran in the event of outages, we have another very important tool to ensure the quality and availability of time-sensitive services.”
UrsaNav’s latest trial used the OSA 5420 series grandmaster clock with built-in GNSS receiver. Timing stability from GPS was measured for several days. This was then replaced with eLoran for the same period with no loss of stability.
The test was conducted indoors where GNSS signals are not usually available, potentially extending the availability of precise UTC timing to many more environments.
“Commercially available GNSS jammers and spoofers are easy and cheap for attackers to acquire,” explained Nir Laufer, VP, product line management, Oscilloquartz, ADVA. “That’s part of the reason why we’re seeing a growing number of incidents across the world of blocked or misleading signals. If power utilities, enterprises, service providers and governments continue to rely on GNSS alone, it’s only a matter of time before the consequences become very serious. That’s why we’re committed to tackling GNSS vulnerabilities with advanced technologies like our ePRTC offering, cesium atomic clocks and our optical timing channel solution. Now that UrsaNav has demonstrated the power of our OSA 5420 series to utilize eLoran in the event of outages, we have another very important tool to ensure the quality and availability of time-sensitive services.”
The demo showed how ADVA’s synchronization technology enables protection for critical infrastructure that needs ultra-reliable aPNT solutions. (Photo: Business Wire)
The National Civil Aviation Agency (ANAC) of Brazil has approved beyond-visual-line-of-sight (BVLOS) flights using SenseFly‘s flagship eBee X fixed-wing drone.
ANAC’s decision means that the senseFly eBee X is officially approved for use in future BVLOS missions carried out by Brazilian drone operators. The drone received approval by demonstrating the safety requirements of the ANAC RBAC-E 94 Regulation for Unmanned Aircraft, through detailed engineering analyses and in-depth flight testing. Sensefly worked in collaboration with drone engineering and consulting specialists AL Drones and geotechnology company Santiago & Cintra.
Following the certification, senseFly eBee X operators in Brazil now only require a CAER (Special Airworthiness Certificate for RPA) waiver for the aircraft with Santiago & Cintra before flying BVLOS operations.
“The commercial drone industry in Brazil has been growing at a phenomenal rate. and we’re excited that the senseFly eBee X is at the forefront of these regulatory developments,” said Pierre-Alain Marchand, regulatory compliance manager, senseFly. “BVLOS is becoming an important tool for operators as they start to explore the potential of more advanced drone operations, and we’re pleased that our technology continues to help define frameworks and legislation in the country. Historic approvals passed in recent years has shown us that Brazil is one of the countries to watch for drone commercialization, so continue to watch this space!”
The authorization comes following approval of senseFly’s proprietary drone technology in 2017, where the use of drones for civil applications in Brazil were legislated as part of the RBAC-E94 regulation. SenseFly drones became the first and only in the country permitted to fly 400 feet in height with a 5 kilometer radius from a licensed pilot or observer, in contrast to previous VLOS operations that restricted use of drones to a 500-meter radius.
“The authorization of senseFly’s eBee X for BVLOS operations is another step towards commercialization of the sector,” said André Arruda, co-founder of AL Drones. “After years of collective hard work and effort from all parties, this certification presents a real opportunity for operators in the future to expand their mapping operations and achieve a robust return-on-investment. We look forward to seeing what this means for BVLOS operations in Brazil in the coming years.”
SenseFly’s eBee X fixed-wing drone is designed to suit a wide range of mapping jobs. At 1.6 kg (3.5 lbs.), eBee X is a lightweight, portable solution that is easy for a single person to operate. With an Endurance Extension option enabling a flight time of up to 90 minutes and single-flight coverage of up to 500 ha at 122 m (1,236 A at 400 ft.), the eBee X drone that offers users the high precision of on-demand RTK/PPK for achieving absolute accuracy down to 1.5 cm (0.6 in) without ground control points. This capability makes the eBee X suitable for BVLOS operations such as long corridor mapping missions for utility companies, expansive crop scouting in agriculture and by enterprise customers who desire a robust and professional drone fleet.
Autobahn program connects new companies with major brands for investment and development, ST is first semiconductor manufacturer to become Anchor Partner
STMicroelectronics, a global semiconductor company, has become an Anchor Partner of Startup Autobahn, which is powering innovation in the automotive sector by introducing selected dynamic new companies to established technology corporations.
Startup Autobahn is based in Stuttgart, Germany. It was created by and is managed by Plug and Play, a Silicon Valley accelerator and investor that historically has introduced more than 35,000 startups to more than 400 corporations.
Anchor Partners in Startup Autobahn include major car brands and vendors of diverse automotive technologies. ST’s support, with its strategic emphasis on smart mobility, boosts opportunities for new companies with innovative ideas for electrification, e-mobility and smart, connected driving to take part in the program.
“We’re extremely pleased to welcome STMicroelectronics to our platform as a new strategic partner,” said Sascha Karimpour, managing director of Plug and Play Germany. “This partnership fits perfectly into our existing ecosystem, covering the automotive value chain. The semiconductor industry is enabling powerful innovations in automotive technology and will play a major role as software and IT become increasingly important in the car of the future.”
Startup Autobahn organizes events throughout the year to bring corporate partners and selected startups together. The diverse platforms include deep-dive presentations, one-to-one introductions, cross-collaboration days, and private meetings between partners and shortlisted startups. Twice-yearly expos showcase the results of collaborations, combined with keynote speeches and presentations from various industry leaders and invited guests.
The program has already successfully connected startups with established brands to activate powerful new concepts in areas such as battery charging, supply-chain and materials management, smart mobility, efficient manufacturing, recycling and enterprise CO2 reduction.
Seoul Robotics has launched Voyage, a plug-and-play lidar perception system. The all-in-one deployment kit is equipped with the company’s proprietary software SENSR2, lidar sensors and a computer.
Seoul Robotics is a 3D computer vision company using artificial intelligence (AI) and machine learning for intelligent robotic perception systems. The company’s sensor-agnostic perception software is deployed by BMW, Mercedes-Benz, the Chattanooga Department of Transportation and Emart, among others.
Seoul Robotics provides companies, institutions and governments with the software behind the sensor that enables its use in markets such as retail, smart cities and security. Voyage is designed to help organizations and communities increase efficiencies and improve safety through a cost-effective, customizable system.
The lidar market, which is on track to reach more than $3 billion by 2025, has become crowded over the past several years as the technology became synonymous with autonomous vehicles. The marketplace is flooded with companies producing sensors to fuel the demand of this industry, but most sensors on the market are sold without any intelligence, leaving companies to develop software in-house, which significantly increases the time and cost of deployment.
With Voyage, organizations are not obligated to purchase a particular sensor if it is not a fit for the solution they are deploying. Customers don’t have to worry about changing software when they change or upgrade their sensors — Voyage is a non-proprietary solution that breaks down the barriers to entry and allows for quick access to 3D vision, according to Seoul Robotics.
“First and foremost, lidar sensors do not work without sophisticated perception software. The lidar industry is investing billions of dollars on sensors without even considering the software needed to interpret the data into actionable solutions,” said HanBin Lee, CEO of Seoul Robotics. “Voyage combines analytics and sensors to bring tangible solutions to market much faster.”
Voyage provides highly accurate object detection, tracking and classification capabilities to enable a wide range of applications for smart cities, intelligent transportation systems, retail analytics, crowd monitoring and security. It fuses three cutting-edge technologies:
3D lidar sensing powered by Seoul Robotics’ proprietary software SENSR2
Edge computing for minimum data burden and ease of integration
Built-in sophisticated perception software for instantaneous analytics
Voyage provides centimeter-accurate 3D object detection, tracking, and classification in addition to volumetric profiling and motion prediction capabilities, regardless of lighting conditions, and can collect and process data from up to four sensors for seamless insights across the sensor coverage zones. As Voyage does not capture, show or store any biometric and otherwise identifying data, it aims to maximize the protection of people’s privacy when installed as part of various smart cities and security systems.
Russia has postponed the launch of its first next-generation Glonass-K2 satellite until early in 2022, according to a report from TASS. The launch was originally scheduled for the fourth quarter of this year. The delay is due to a portion of onboard equipment requiring further work following a ground-based test run.
Glonass-K2 is the next-generation navigation satellite of Russia’s GLONASS positioning system. The K2 satellites are expected to provide navigation precision of less than 30 cm.