The construction of the Perca Bypass, a critical infrastructure project underway in the Italian Alps, highlights the increasing role of advanced technology in managing complex builds. Located near the village and commune of Perca — a destination known for its tourism trade — the new 632 m tunnel and supporting road network are designed to improve regional connectivity and enhance commuter safety.
The project, which began in 2023 and is expected to take three years to complete, is being delivered through a joint venture between European construction group Strabag and regional specialist Alpenbau. Once finished, the bypass is expected to relieve the flow of up to 26,000 vehicles that pass through Perca daily during peak periods, easing congestion and opening new routes for both tourism and local commerce.
Given the large number of machines, teams, and partners involved, coordinating the work requires effective management and communication tools. Alpenbau, drawing on a long-standing collaboration with Topcon Positioning Systems, the team is now using Topcon’s Aptix Integration Platform, which enables site managers to monitor and oversee progress remotely, offering real-time insights into workflow and project status without leaving their offices.
Acting with Aptix
“Aptix is a very convenient solution for us to manage our construction sites,” said Benjamin Niederkofler, CEO of Alpenbau. “One of the advantages of Aptix is that you can directly load 3D models onto machines that are equipped with machine control systems. This means that you always have the possibility to monitor the site from the office. This is a very important and fundamental tool for us to remotely monitor a construction site.”
Aptix consolidates data from different contractors and machinery, regardless of the manufacturer or operating system, and provides a comprehensive view of project performance. Senior leaders can access essential metrics in real time, such as work progress, fuel consumption, and carbon emissions, improving the ability to make informed decisions.
Control, Collaboration, Clarity
Throughout every stage — from planning and design to actual construction — the platform supports automatic workflows that deliver designs to machines and collect telematics data without manual intervention. This automation reduces the risk of missing information and helps maintain clear communication among stakeholders.
A joint effort of this scale requires constant collaboration among contractors, local authorities and other stakeholders. The Aptix platform helps facilitate transparency in workflows by allowing access to daily productivity reports and construction data, supporting open cooperation and oversight for both project managers and crew.
“Recently it has become increasingly important that we create transparency and co-operation on this construction site and share productivity daily with construction management or even with our customers,” said Niederkofler. “Having this transparency across the entire construction site is a decisive advantage.”
Andrea Marzi, technical director at Strabag Italy, added, “This unique platform allows all parties involved in the project to access all relevant construction information and data.”
Once completed, the Perca Bypass is expected to generate new economic opportunities for the region. Project leaders say that by adopting innovative digital workflows and centralized data management, they are able to direct complex operations more effectively and deliver the project with increased speed and accuracy.
Topcon Agriculture has released its new Value Line Steering solution for farmers using mid-range tractors on small- to medium-sized farms. The new offering represents a significant step in making autosteering technology, typically used on larger machinery, accessible to a broader range of farmers.
“With the Value Line, we are opening up opportunities for farmers who have older or smaller machinery, or smaller specialty farms, to boost the value of their machinery, with autosteering technology that is based on our proven premium steering technology used for decades on larger machines,” said Antonio Marzia, executive vice president, Topcon Agriculture. “It is an integrated system designed to seamlessly work with a variety of tractors, including compliance with ISOBUS-UT functionality to offer universal compatibility and ease of use. Our goal is to provide high-quality, reliable, affordable, value-added technology that works across a wide range of applications, machinery and brands.”
The Value Line Steering solution is a comprehensive package that includes a GNSS receiver, electric steering wheel controller, touchscreen console and Horizon Lite software, compatible with front-wheel-steer tractors. Farmers also have the option to add local, satellite or RTK correction services such as Topcon’s Topnet Live for enhanced precision based on their unique needs.
Autosteering allows for more efficient use of resources, leading to reduced input costs for seeds, fertilizers, and fuel. This not only improves the farm’s bottom line but also contributes to more sustainable farming practices. The increased accuracy in field operations can also lead to improved crop yields, further enhancing profitability.
Farmers from various agricultural sectors, including commodity crops, specialty crops, and mixed farming systems, can expect significant benefits in their operations when adopting the technology.
The Value Line Steering solution is available through Topcon Agriculture’s global network of authorized dealers.
One of the most persistent sources of GNSS error — ionospheric delay — has been challenging to correct in real time, especially for mass-market devices. While dual-frequency receivers and commercial correction services can mostly mitigate this issue, they remain too costly and impractical for the billions of smartphones and IoT devices that rely on single-frequency GNSS. Even for dual-frequency systems, the commonly used ionosphere-free linear combination amplifies multipath and receiver errors and reduces data redundancy — yielding only two usable combinations from four original measurements.
This landscape may be shifting with the introduction of GloTEC, a real-time global Total Electron Content (TEC) map from NOAA’s Space Weather Prediction Center (SWPC), released in February 2025. GloTEC assimilates both ground- and space-based observations to provide real-time global ionospheric corrections without relying on error-prone linear combinations.
Unlike coarse models such as the broadcast Klobuchar algorithm or forecast-only products such as the predicted IGS Global Ionosphere Maps, GloTEC updates every 10 minutes using real-time measurements. This high refresh rate establishes a new benchmark for open-access ionospheric nowcasting in GNSS applications.
Originally designed to monitor and mitigate space weather impacts on aviation and communications, GloTEC may also deliver a broader benefit: enabling precise, scalable GNSS corrections for low-cost, single-frequency devices, making high-accuracy positioning more accessible and democratic.
Why Nowcasting Matters for GNSS
The GNSS community has long had to choose between accuracy and latency. Predictive models, such as those from NASA CEDIS or CODETEC, can offer reasonable approximations but may fall short when real-time corrections are required, particularly in the context of navigation, asset tracking or autonomous systems.
Post-processed products (such as rapid/final IGS GIMs) provide excellent fidelity but are typically delayed by hours, days, or even weeks. This makes them useful for research or auditing, but not for real-time navigation needs.
Commercial correction services, such as Trimble RTX and Hexagon’s TerraStar, have filled the gap for high-value applications. These systems interpolate ionospheric corrections in real time, but at a significant cost and they typically require specialized GNSS receivers.
GloTEC bridges this gap by delivering a publicly accessible, high-refresh ionospheric product that can support near real-time corrections. Updated every 10 minutes with a 2.5° latitude and 5° longitude spatial resolution, GloTEC represents a major step forward for public sector GNSS capability, particularly in contexts where accuracy, reliability and scale are all crucial. The data has also been supporting the United States Space Force and is accessible through their Unified Data Library (UDL).
Technical Approach: Adapting GloTEC for Practical Use
While the potential of GloTEC is exciting, turning it into usable corrections for consumer-grade devices isn’t straightforward. TEC maps represent volumetric electron density, while most mass-market GNSS chipsets, especially in smartphones, expect simplified models, such as the eight-parameter Klobuchar model broadcast by GPS satellites. GloTEC is a three-dimensional data assimilation system that uses a Gauss-Markov Kalman Filter to estimate electron density in the ionosphere. It ingests slant TEC measurements from ground-based GNSS receivers and space-based radio occultation data, using the IRI-2016 model as its background state.
To bridge this mismatch, Zephr’s team has been exploring regional fitting techniques, whereby a local subset of GloTEC data is used to generate custom Klobuchar coefficients. These can be transmitted to devices via standardized protocols, such as the LTE Positioning Protocol (LPP), enabling improved ionospheric delay estimation with minimal changes to device-side computation. Even with a regionalized Klobuchar fit and LPP encoding, there is still the problem of accessing the GNSS chip to apply the corrections. To solve this problem, Zephr has created a virtualized positioning engine that takes the raw GNSS measurements from the chip and provides a purely software-based solver. This approach allows the team to implement a variety of more advanced positioning techniques using commodity hardware such as smartphones.
Field Testing: A Quantitative Step Forward
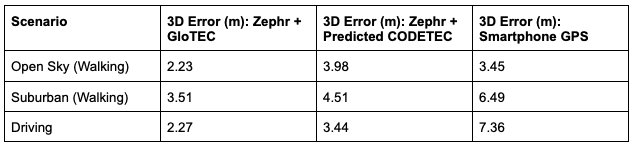
To evaluate the efficacy of GloTEC in improving GNSS accuracy, engineers at Zephr used the virtualized positioning engine to conduct 51 real-world campaigns across various conditions – including urban, suburban, static, walking, and driving – using a Pixel 8 smartphone and an RTK unit for ground truth.
The results were promising, as shown in Figure 1:
Figure 1: GloTEC vs. CODETEC vs. Android Native across multiple scenarios. (All figures provided by author)
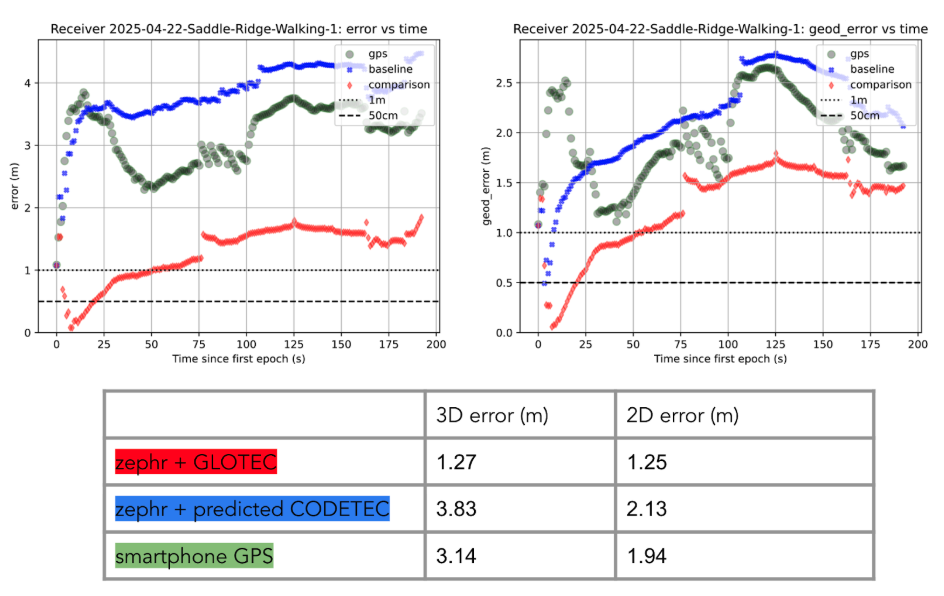
We can break down these results using detailed graphs for each scenario as examples. This will provide a more in-depth look at the positioning for specific traces through the outlined scenarios in Figure 2, Figure 3 and Figure 4:
Figure 2: GloTEC vs. CODETEC vs. Android Native for an open sky walking scenario
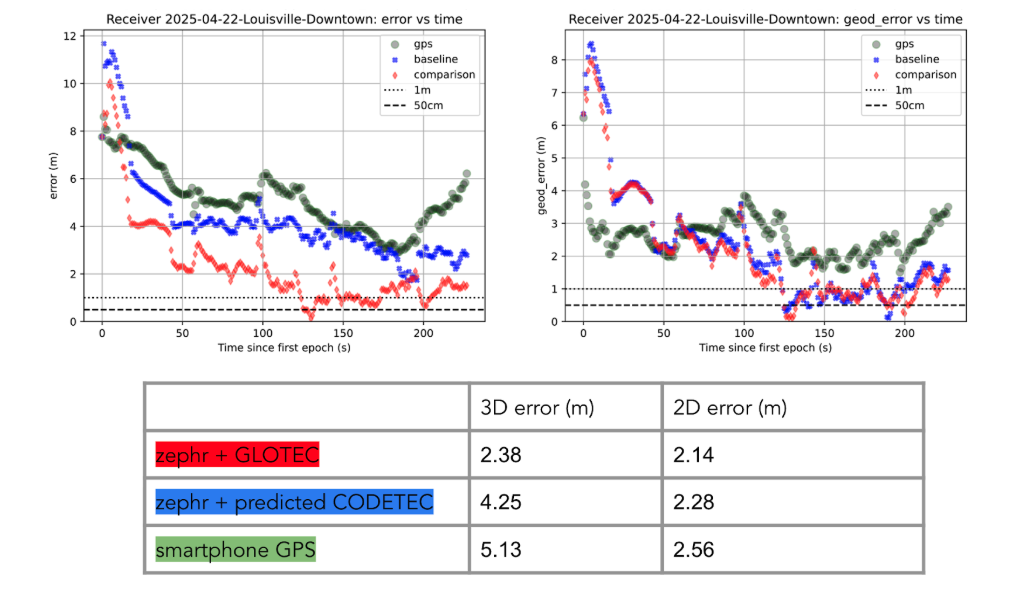
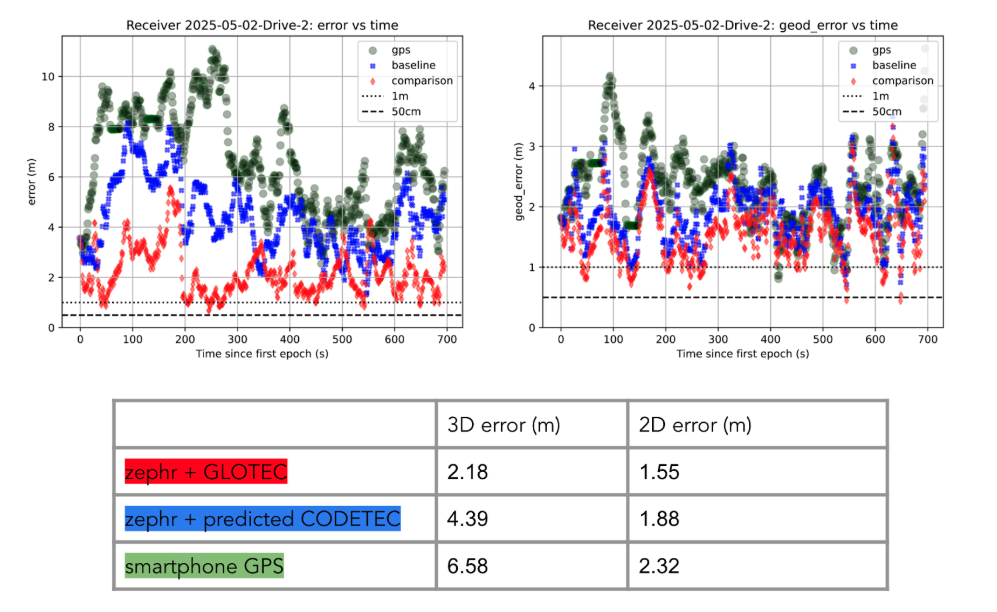
Figure 3: GloTEC vs. CODETEC vs. Android Native for a suburban downtown walking scenario.Figure 4: GloTEC vs. CODETEC vs. Android Native for a mixed sky driving test.
Across all categories, the GloTEC-based regional fitting approach significantly outperformed both the default GNSS solution (which uses broadcast data plus a Klobuchar mode) and the competing IGS products. Accuracy improved by up to 69% in driving scenarios and 46% in walking scenarios, compared to standard smartphone GPS.
While the Pixel 8 used in testing supports dual-frequency GNSS, smartphones face several practical limitations that hinder effective use of ionosphere-free dual-frequency combinations. These include limited signal availability (due to antenna constraints, L1/L5 support gaps, and partial constellation coverage), elevated multipath and noise (especially from omnidirectional antennas in dynamic conditions), and unstable clock biases that complicate error modeling. In fact, iono-free combinations can amplify multipath effects, potentially degrading accuracy in some conditions.
Despite these constraints, the results show that meaningful improvements in positioning are possible using a software-based approach with publicly available corrections. GloTEC, when paired with cooperative or cloud-based GNSS engines, offers a substantial step forward without requiring expensive commercial correction services or specialized hardware.
Broader Implications and Next Steps
While these results are promising, several challenges remain before GloTEC-based corrections can be broadly deployed:
Connectivity Requirements: Real-time access to GloTEC requires periodic downloads over cellular or Wi-Fi connections, raising questions about reliability in low-bandwidth or disconnected environments.
Global Calibration: The accuracy of regional fitting depends on local coverage density and VTEC variability. Further tuning may be needed in equatorial or polar regions, where ionospheric behavior is more volatile.
Nevertheless, the availability of GloTEC marks a significant milestone. For the first time, a free, real-time, high-resolution ionospheric correction product is accessible to developers, researchers, and engineers seeking to improve GNSS accuracy at scale. NOAA SWPC has plans to integrate more low-latency space-based and ground-based data into GloTEC in the near future. The new version of the model outputs will be released to the public once the results are validated. As techniques for applying it to mobile and IoT devices mature, the GNSS community may see a broad shift toward more precise, resilient, and cost-effective positioning systems.
GloTEC may have been designed to help forecasters monitor the response of the ionosphere due to space weather events, but its potential to provide an advanced tool for positioning on Earth is just beginning to be understood. In a world where nearly every mobile application depends on location, and where the cost of poor accuracy is rising (from package delivery failures to navigation errors), this kind of public infrastructure is invaluable.
Researchers and industry developers alike should explore how this NOAA capability can be integrated into their positioning systems. If properly supported, GloTEC could become one of the most impactful GNSS innovations of the decade.
Septentrio, part of Hexagon, has added the onocoy GNSS correction service to its Agnostic Corrections Partner Program. The program is designed to give users the ability to select from multiple high-accuracy correction services, supporting a range of application needs and geographic requirements.
The onocoy service operates as a decentralized, crowdfunded RTK network, providing reliable and cost-effective high-accuracy positioning. This approach is intended to benefit sectors such as agriculture, mining, drone operations, robotics, autonomous vehicles, geodesy and more.
Onocoy operates a community-driven GNSS RTK network powered by Web3 and blockchain technology, to offer secure, transparent and efficient data sharing and transactions, according to the company. Although privately operated, this network actively monitors its base stations to maintain service reliability and quality. Onocoy is joining Septentrio’s Agnostic Corrections Partner Program, which already includes several leading correction services such as GEODNET‘s RTK Service and Swift Navigation’s Skylark Precise Positioning Service.
VertiGIS has introduced VertiGIS Neo, a secure, cloud-based platform designed to improve sector-specific workflows through artificial intelligence (AI).
According to the company, VertiGIS Neo aims to accelerate business operations, streamline problem-solving and boost productivity by delivering modern web and mobile user experiences across its suite of solutions, including VertiGIS Studio, VertiGIS FM, VertiGIS Networks and VertiGIS ConnectMaster.
The platform incorporates embedded AI to drive innovation for both end users and application development teams. VertiGIS Neo enhances workflow processes in three key areas:
End-user assistants: AI-powered assistants and a low-code/no-code interface help users complete tasks more efficiently in web and mobile applications.
Application builder productivity: AI co-pilots enable administrators to configure and customize solutions with less effort.
Process transformation: AI capabilities fundamentally change how work is performed, from field operations to back-office tasks.
Flexible Cloud Deployments
VertiGIS Neo is built on a cloud-first infrastructure that supports fully managed, private, or hybrid cloud environments, offering operational flexibility, scalability and enhanced security. The platform supports rapid deployment within CI/CD pipelines and provides predictable pricing models for customers.
VertiGIS Neo offers three deployment options:
Cloud managed services: Complete cloud-based solution delivery, including data, infrastructure and applications.
Private cloud: Turnkey deployment into customer environments using prescribed hardware and containers.
Hybrid cloud: Multi-tenant and single-tenant SaaS applications accessing customer data within their environment.
Industry Solutions
VertiGIS Neo is designed to address business challenges across several sectors:
Utilities: Enables customers to model physical network infrastructure as digital twins and manage millions of service points, supporting the entire asset lifecycle from planning to decommissioning.
Telecommunications: Streamlines management of FTTx services and oversees both physical assets and logical circuits for communications providers.
Local Government: Helps build transparent, engaged and sustainable smart cities, improving engagement for both citizens and staff.
Enterprise: Integrates IoT and AI for real-time intelligence, remote sensing and asset tracking, fostering innovation in the private sector.
VertiGIS Neo’s features include dynamic attribute analysis with natural language queries, voice-to-prompt interfaces for map queries and automatic asset inspection and damage assessment using image recognition. The platform also allows users to create intelligent workflows from text prompts and automates the digitization of paper forms into digital records.
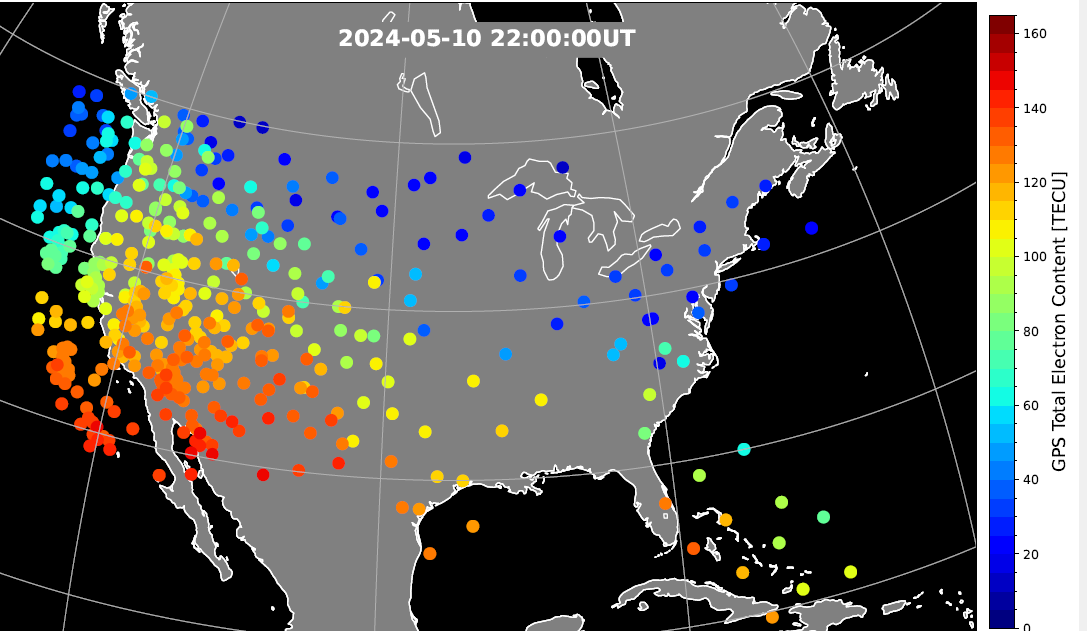
During the geomagnetic storm that took place May 10–11, 2024, GPS users reported significant positioning errors and outages. In particular, farmers in the Central United States reported difficulty in getting a fix with their tractors and other farm equipment.
Also affected, to a lesser extent, was the Southwestern United States.
A new study has identified the cause of the GPS outages by analyzing the data from a 1‐Hz GPS receiver network. Standalone GPS position errors In precise point positioning (PPP) mode in the Central United States reached 70 meters on May 10. The errors were attributed to a steep wall in ionospheric plasma that rapidly moved southward.
In the soutwestern states, the GPS position errors were elevated 10 to 20 meters because of the enhanced plasma density.
Vertical protection level as provided by WAAS.
Then, on May 11, intense auroral activity caused rapid enhancements in the ionospheric plasma, leading to abrupt position errors of 10 meters. Network‐based position systems likely encountered even longer duration of position errors because these ionospheric disturbances are localized.
“These findings highlight the need for more accurate understanding of ionospheric plasma conditions, as well as software and hardware improvements, to reduce disruptions during space weather events,” report the authors of “Spatio‐Temporal Evolution of Mid‐Latitude GPS Scintillation and Position Errors During the May 2024 Solar Storm.” Authors are Waqar Younas, Yukitoshi Nishimura , Weixuan Liao , Josh L. Semeter, Sebastijan Mrak, Jade Morton and Keith M. Groves. The full report will appear in an upcoming issue of the Journal of Geophysical Research: Space Physics and is now available on ResearchGate.
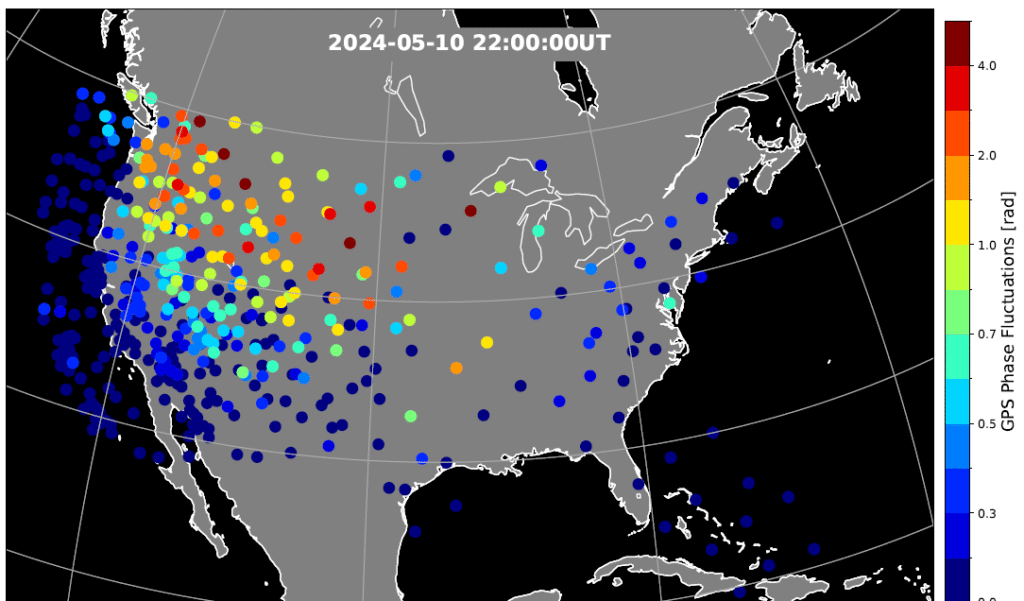
Figure 2. Phase scintillation index over the United States during the geomagnetic storm at 22:00 UT on May 10, 2024. The map is derived from the Global Positioning System (GPS) signals. The map shows enhanced phase fluctuations that impacted GPS position accuracy. Adapted from Figure 4d of the paper. (Credit: Authors)
Key Points
PPP failed to converge in the SED and trough, while PPK became unstable after CME arrival until the recovery phase.
SED, EIA, and trough created position errors on the noon‐evening sector. Substorms caused position errors on the nightside.
Scintillation, cycle slips, satellite geometry and ray bending were identified as contributing factors to the large position errors.
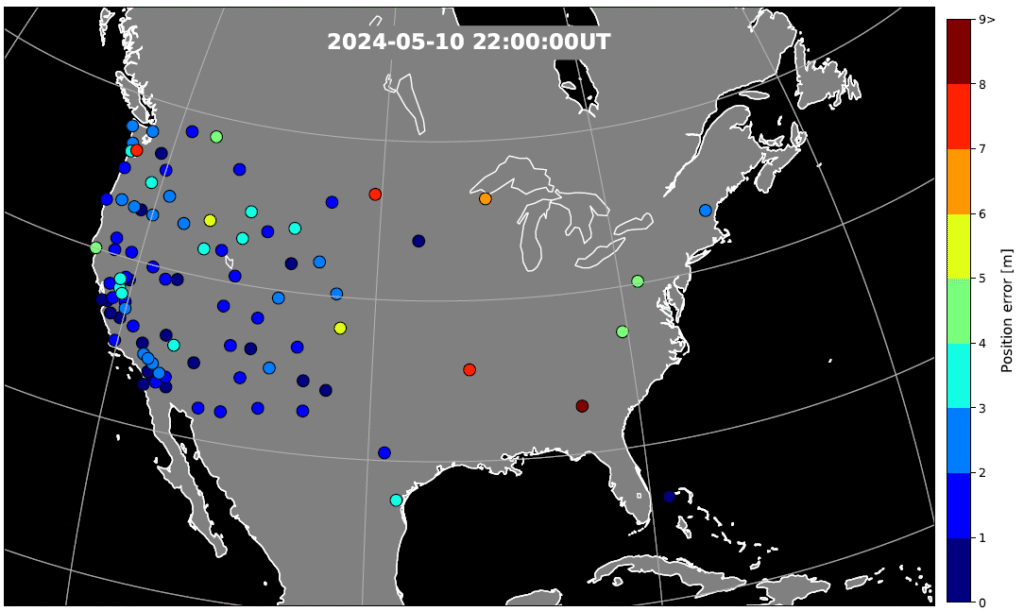
Figure 3. GPS position error over the United States during the geomagnetic storm at 22:00 UT on May 10, 2024. The map is derived from the Global Positioning System (GPS) signals. The map shows large error occurs at trough boundary and enhanced TEC regions. Adapted from Figure 5d of the paper. (Credit: Authors)
The study investigates impacts of the May 2024 superstorm on the mid‐latitude GPS scintillation and position errors. Using 1‐Hz GPS receiver data, the research team identified position errors in PPP mode reaching up to 70 m in the Central United States during the storm main phase on May 10.
The PPK solution becomes unstable following the arrival of storm and lasted till the recovery phase, coinciding with reported GPS outages of farming equipment. The large position errors were attributed to strong scintillation and carrier phase cycle slips around the equator-ward boundary of the ionosphere trough, where large total electron content (TEC) gradients and irregularities were present.
In the Southwestern United States, position errors of 10–20 m were associated with the storm‐enhanced density and equatorial ionization anomaly. Scintillation and cycle slips in this region were minor, and bending of the GPS signal paths (refractive effect) is the probable cause of the position errors. PPP outages were also associated with sudden changes in the geometric distributions of available GPS satellites used in position calculations.
On May 11, energetic particle precipitation during substorms led to abrupt jumps in TEC and scintillation, resulting in rapidly evolving position errors of up to 10 m. These findings highlight the critical role of storm‐time plasma transport, precipitation and irregularity formation in degrading GPS performance.
“The study underscores the need for accurate ionospheric state specification, improved signal processing technique, real‐time ionospheric corrections, and optimized satellite selection algorithms to enhance navigation resilience during severe space weather events,” the authors conclude.
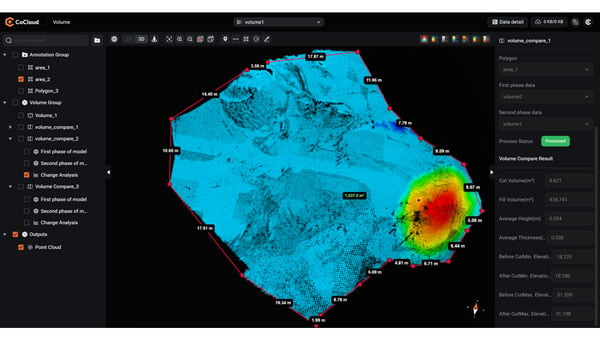
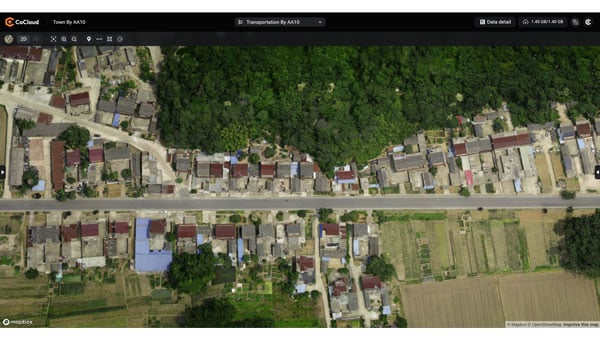
CHC Navigation (CHCNAV) has introduced CoCloud, a cloud-native platform developed for 3D data processing, management and collaborative analysis. The platform is designed to handle multi-source 3D data and supports streamlined workflows from data acquisition to deliverable creation, eliminating the need for local hardware investment.
CoCloud incorporates an advanced photogrammetry engine capable of efficiently processing data from sources such as aerial imagery and lidar scans. The platform produces digital orthophotos, point clouds and OSGB models with a high level of precision suitable for professional applications.
The platform offers tools for online data visualization, sharing and real-time collaboration on tasks such as volume calculations and point cloud editing. Its interface is designed to be intuitive and user-friendly, so users can perform complex 3D data operations without requiring extensive specialized training. CoCloud supports a range of data formats and includes features for dataset and timeline management.
Photo: CHCNAV
The platform offers API access and private deployment options, which allows organizations to integrate the platform into existing systems and customize workflows, from initial data collection through to final application delivery, according to their operational needs.
The platform uses distributed data centers located in Germany and Ireland for localized storage and processing. Both facilities comply with the European Union’s General Data Protection Regulation for reliable data protection throughout collection, transmission and storage.
TDK Corporation has introduced the Tronics AXO315T0, a high-temperature MEMS accelerometer designed for measurement while drilling (MWD) applications in the energy sector. The new sensor features a ±14 g input range and a digital interface, expanding TDK’s MEMS inertial sensor portfolio.
The AXO315T0 uses TDK’s closed-loop architecture, which delivers advanced vibration rectification and resistance to operational shocks. The device maintains a bias residual error of 0.8 mg across its operating temperature range of minus 30°C to 150°C, enabling precise and continuous inclination measurements for directional drilling tools exposed to high temperatures.
To meet the demanding reliability requirements of complex drilling operations in harsh environments, TDK qualified the AXO315T0 through more than 1,000 hours of powered life testing at 165 degrees Celsius, temperature cycling from minus 55 degrees Celsius to 165 degrees Celsius, and high-temperature vibration tests at 20 g RMS random vibration combined with a 50 g sine sweep.
The AXO315T0 offers a typical bias drift of less than 1 mg without recalibration after 1,000 hours at high temperature, providing a digital, low size, weight and power (SWaP) alternative to traditional quartz accelerometers. This advancement supports a new generation of MWD tools capable of long-term operation at elevated temperatures without compromising performance.
AXO315T0 sensors and evaluation boards are available for sampling and customer evaluation. TDK plans to further expand its MEMS portfolio for the energy market with a new accelerometer capable of operating at temperatures up to 175 °C.
Main applications:
Measurement while drilling (MWD)
Logging while drilling (LWD)
Directional drilling
Wireline
Key features and benefits:
±14 g input range, single-axis accelerometer
Operating temperature range: minus 30 °C to 150 °C
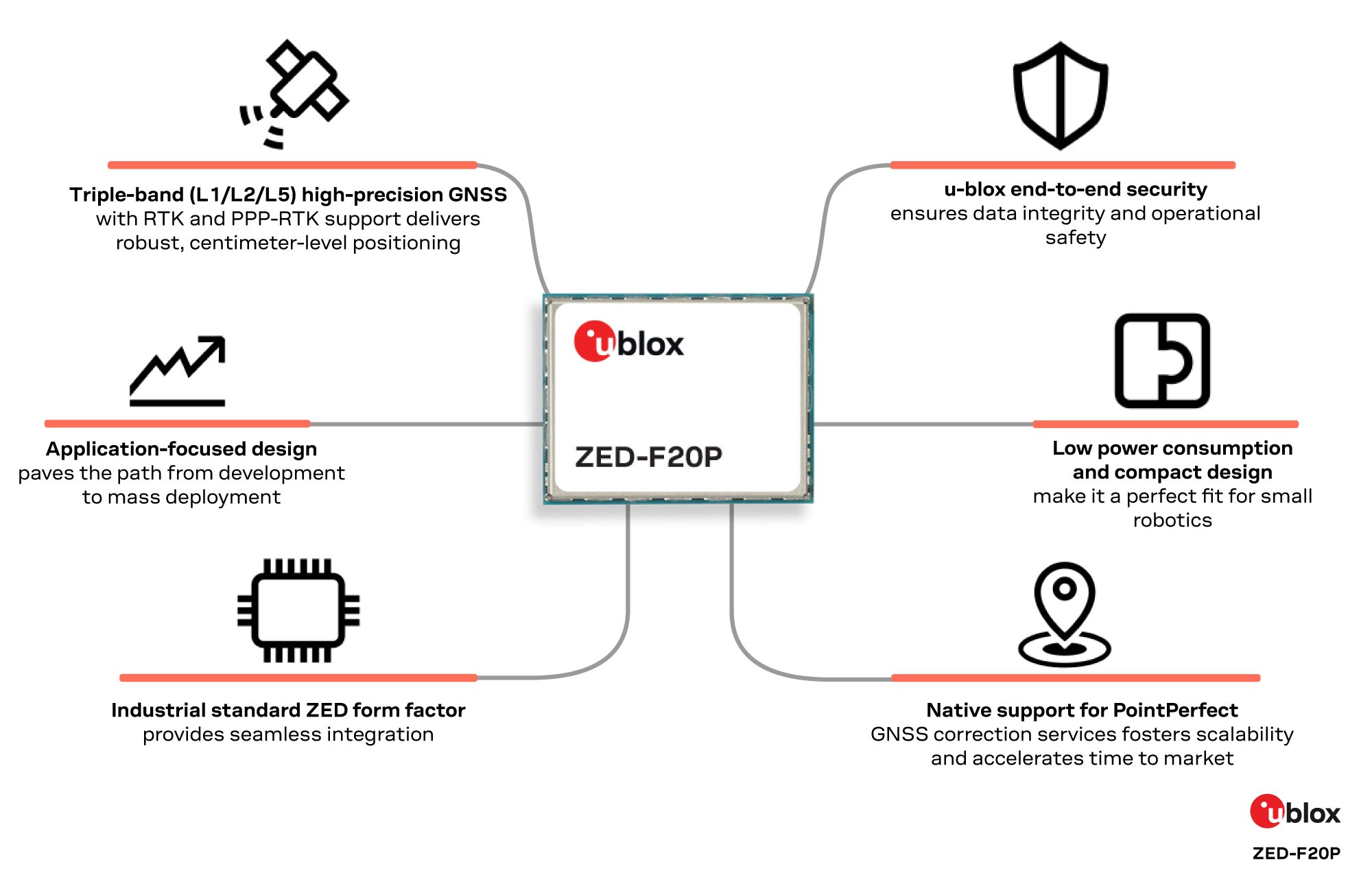
u-blox has expanded its ZED form-factor portfolio with the ZED-F20P, a L1/L2/L5 triple-band GNSS module designed for high precision applications in ground and air robotics.
The ZED-F20P provides OEMs deploying fleets of ground robots, drone light shows, and other dynamic autonomous platforms with centimeter-level RTK and PPP-RTK positioning, fast convergence times, and integrated security features.
Within the u-blox high precision receiver family, the ZED-F20P is a dedicated L1/L2/L5 triple-band specialist. It delivers deterministic, centimeter-level RTK and PPP-RTK accuracy tailored to the needs of lightweight and dynamic platforms. Its end-to-end silicon-to-firmware architecture supports 25 Hz update rates, robust security features, and low power consumption in a streamlined design.
These capabilities combine to deliver industrial-grade reliability and enable smooth scaling from proof-of-concept to high-volume deployment without increasing system cost, power consumption, or integration complexity.
Compatible with the established ZED footprint and UBX protocol, the ZED-F20P fits directly into existing layouts. The expanded ZED portfolio now covers dual-, triple- and all-band GNSS options, giving developers the flexibility to select the best fit while reusing the same board layout. This enables both flexible design choices and a straightforward upgrade from earlier products.
The ZED-F20P pairs with the u-blox ANN-MB2 all-band high precision antenna to ensure optimal RF performance, offering a one-stop solution for streamlined evaluation and integration. This consistent design approach accelerates time to market while preserving hardware and software continuity.
PointPerfect Flex and Live native support:
When combined with u-blox PointPerfect Flex and Live GNSS correction services, the ZED-F20P becomes a complete, production-ready GNSS solution that delivers centimeter-level accuracy in seconds, without the need for a local base station. The triple-band L1/L2/L5 architecture ensures rapid convergence and resilience in challenging environments, while PointPerfect provides reliable corrections across key regions. This tight integration simplifies development and accelerates time-to-market for mass-market autonomous platforms.
“The ZED-F20P delivers the precision and reliability required for today’s ground and air robotics,” said Mårten Ström, director of product management at u-blox. “It strikes a rare balance between performance, integration simplicity, and application-specific focus, enabling engineering teams to move from prototype to fleet deployment with confidence. We’re already seeing strong interest from robotic lawnmower markets preparing for large-scale rollout.”
Engineering samples of the ZED-F20P are available now. Developers can evaluate the module using the EVK-X20P evaluation kit, with a simple configuration.
PTx Trimble, formed as a joint venture in 2024 by AGCO and Trimble, is providing a new GNSS receiver for precision autoguidance: the NAV-960 guidance controller. The agriculture controller improves positioning accuracy and availability to deliver greater uptime while providing the computing power to support complex field operations and handle future developments.
The PTx Trimble NAV-960 offers farmers an upgrade to its predecessor, the NAV-900, with a host of improvements, including enhanced speed, higher processing power and improved positioning performance. Using this receiver, farmers can handle the most complex and demanding applications for guidance and steering, creating improved uptime and the flexibility to seamlessly run field operations. This enables greater efficiency and boosts productivity.
Benefits to farmers include saving on inputs from reduced overlap and less downtime that decreases operational delays and improves machine utilization, aimed at reducing operator fatigue during long planting days and improving overall productivity. Using the NAV-960 as part of a complete autosteering solution allows operators to focus on the fieldwork as it happens and allows growers to get work done faster, reducing wear and tear on equipment.
With its cast aluminum base and sleek design, the NAV-960 is built to withstand tough farming environments, including searing heat, freezing cold, driving rain, persistent dust and everything in between. The additional processing power of the upgraded CPU ensures compatibility and readiness for fieldwork.
New features include:
Patented industrial design with rugged, dust-, water- and vibration-resistant base
Enhanced GNSS engine to track more satellites than ever before, paired with enhanced inertial sensors, provides up to 50% improved vehicle positioning and line following performance compared to the NAV-900
Onboard Trimble ProPoint® technology with Trimble IonoGuard™ for maximum resistance to downtime caused by solar events and scintillation
Centimeter-level accuracy when used in combination with Trimble CenterPoint® RTX or RTK correction signals
Advanced quad core processor for extra power, faster calculations and improved data delivery speeds
Complete compatibility with current PTx Trimble steering systems, utilizing the same cables as the NAV-900 guidance controller
Onboard Wi-Fi and Bluetooth will make the NAV-960 easier to support for service teams and ready to embrace future enhancements across the PTx Trimble solution portfolio. As part of the company’s commitment to its retrofit-first, mixed-fleet strategy, the NAV-960 is fully compatible with all GFX series displays including the GFX-350, -1060 and -1260 models.
How Farmers Benefit
Farmers who implement the new receiver will see improvements from the start, including:
Increased uptime and profitability
Reduced overlap and lower input costs
Reduced labor costs by maximizing operator effectiveness and eliminating idle time
Reduced stress and fatigue during long days in the cab, decreasing operator mistakes and errors in judgement
The NAV-960 is available worldwide, providing a solid foundation for fieldwork today and is ready to handle technology developments in the future for both aftermarket and OEM installations.
Read a roundup of recent products in the GNSS and inertial positioning industry from the May 2025 issue of GPS World magazine.
SURVEYING
Integrated Navigation Solution Ideal for inspection and survey applications
Photo: Teledyne
Teledyne Compact Navigator is an ultra-compact autonomous integrated navigation system engineered for subsea and surface vehicles. It is ideal for small vehicles, enabling inspection and survey operations on compact platforms. The system is offered in two depth-rated models, one capable of operating at 4,000 m and another at 300 m. The Compact Navigator consumes less than 7 watts of power, extending mission duration by conserving energy. The system operates fully autonomously, eliminating the need for external aiding or operator intervention. Advanced phased array Doppler Velocity Log technology enhances performance while allowing the device to be mounted on an autonomous underwater vehicle or ship hull.
The Compact Navigator supports a broad range of applications, including autonomus underwater vehicles, shallow water surface navigation, operations in GNSS-denied environments and dynamic positioning for surface vehicles. The system provides true North-seeking gyrocompass-grade performance, and its web-based user interface supports integration, operation and troubleshooting. It is factory-calibrated and offers a battery backup option for reliability in demanding conditions. The system operates independently of satellite signals, making it resistant to jamming or signal loss. This capability is significant for shallow water navigation, where GNSS-based systems may be unreliable.
3D Reality Capture Solution Can be used across various industries
Photo: Faro
FARO Blink, a new 3D reality capture solution, is designed to make collecting and utilizing 3D data more accessible and efficient. It centers on software-driven technology integrating advanced visualization and automated workflows through the FARO Sphere XG Digital Reality Platform. This integration aims to simplify operations and deliver faster, more actionable insights for users across various industries.
FARO Blink is tailored for professionals in fields such as surveying and construction. It offers high-quality visualization and can streamline workflows, allowing teams to efficiently capture, view and share 3D data, thereby enhancing project progress and collaboration.
The MS400C is a fully integrated multibeam echosounder designed for uncrewed surface vessels. The new system combines sonar processing, inertial navigation, GNSS positioning and sound velocity sensing into a single unit.
The MS400C seeks to address deployment challenges faced by USV operators during hydrographic surveying. Its compact, lightweight design allows direct mounting on small platforms. Installation involves connecting a few cables to the IPC and power supply and to the primary and secondary GNSS antennas. With preconfigured spatial relationships, operators can deploy and start surveying quickly, reducing configuration errors and ensuring consistent data quality.
Equipped with Auto Survey functionality, the system calibrates parameters based on water conditions, which streamlines pre-survey procedures. Real-time roll compensation and attitude data from the internal measurement unit, combined with sound velocity profiling, ensure high-fidelity depth measurements, even in dynamic conditions. Designed for autonomous and remotely operated survey platforms, the MS400C supports data collection in confined waterways.
The SurveyPod RTK/PPK GNSS system is built for professionals in surveying, agriculture, mining and construction. The system integrates GPS, GLONASS, Galileo and BeiDou signals for improved satellite visibility and accuracy, even in harsh environments.
Powered by a CORS Network, SurveyPod offers real-time, centimeter-level positioning ideal for high-precision applications. The device supports tilt compensation for reliable data collection at angles and boasts up to 16 hours of battery life, making it ideal for extended field operations. With this launch, Nibrus Technologies is expanding its survey equipment portfolio, offering a Made-in-India GNSS solution to the global market.
This MEMS-based north-seeking inertial measurement unit (IMU) operates independently of GNSS. It can achieve a heading accuracy greater than 1° secant latitude without GNSS assistance. When integrated with GNSS and SBG Systems’ navigation algorithms, it can achieve INS heading accuracy greater than 0.01°.
Measuring 52 x 52 x 36 mm and weighing less than 150 g, it consumes only 2 watts of power. It offers long-term reliability in demanding conditions, and its ITAR-free status allows unrestricted global deployment. SBG Systems also has developed a new pure north-finding algorithm capable of rapid initialization in both static and dynamic conditions within one minute, as well as an advanced GNSS/INS fusion algorithm that delivers exceptional single-antenna heading accuracy even in low-dynamic environments.
The IMU is particularly suited for subsea applications, including remotely operated vehicles and autonomous underwater vehicles, as well as geospatial and marine surveying tasks requiring precise single antenna heading accuracy.
The first off-the-shelf solutions are expected to be available by early 2026. SBG Systems
Post-Processing Software With upgraded features
Photo: SBG Systems
Qinertia 4.2 is an updated version of SBG Systems’ post-processing software for GNSS and INS data. One of the notable additions is the beta version of Precise Point Positioning Fixed Ambiguity, which offers centimeter-level accuracy processing without the need for a base station. The update also includes a new RTS smoothing option, the Trajectory Smoother, which enhances INS processing by removing artifacts while maintaining precision. Another feature is the standalone Lever Arm Estimation Tool, now available as a separate application with a simplified interface. The Advanced Virtual Base Station Network Creation has been enhanced with improved base station quality indicators to increase reliability.
It is compatible with the New Ellipse series and supports Teledyne Intrepid INS. The software now offers faster processing speeds, enhanced geodesy functionalities such as base station velocity analysis, and updated tools for assessing processing quality through new status plots. It also supports the latest firmware versions of Ekinox, Apogee, Navsight and Quanta systems. SBG Systems
MACHINE CONTROL
GNSS Receiver and INS System For machine guidance
Photo: Septentrio
The AsteRx RB3 GNSS receiver and the AsteRx RBi3 GNSS/INS system are designed to operate in extreme environments. They feature IP69K-rated housings and components that have undergone ISO-standard testing.
The technology offers durability under heavy shocks, vibrations and challenging environmental conditions, making it suitable for demanding applications such as construction, mining and port automation.
The AsteRx RB3 and RBi3 utilize multi-frequency GNSS technology to deliver precise, centimeter-level positioning even in environments where GNSS signals are typically difficult to maintain. The receivers can be mounted externally on heavy machinery or integrated into chassis systems, offering flexibility in placement and simplifying installation.
The AsteRx RBi3 incorporates FUSE+ technology, which combines a high-performance GNSS engine with an industrial-grade inertial sensor. This integration provides accurate orientation data, such as heading, pitch and roll, alongside reliable positioning. In dual-antenna configurations, the receivers deliver sub-degree GNSS heading accuracy immediately upon initialization. The AsteRx RB3 and RBi3 are ideal for machine guidance in industries requiring rugged equipment to maintain precision under extreme conditions.
Handheld Reality Capture Solution For maximum mobility
Photo: Topcon Positioning
Designed for mass data solutions, the CR-H1 utilizes PIX4Dcatch, a specialized application with integrated lidar that runs on iPhone devices. It collects images and employs photogrammetry to create detailed, full-color 3D point clouds. The iPhone connects to Topcon’s HiPer CR receiver, enabling the application to collect georeferenced images. The receiver and iPhone are mounted on a specialized handle designed and manufactured by Topcon so that users can capture point clouds without a tripod.
The CR-H1 can be used for utilities and subsurface mapping, construction verification and earthworks, civil engineering and site verification, land surveying and forensics and 3D data capture. Topnet Live subscriptions are available for the CR-H1, providing real-time GNSS corrections that deliver higher-quality point clouds.
Handheld GPS Device Can provide up to 200 hours of GPS navigation on a single charge
Photo: Garmin
The Garmin eTrex Solar is a handheld GPS device with a built-in solar charging feature. This feature allows for potentially unlimited battery life in optimal sunlight conditions. Even without direct solar input, the device can provide up to 200 hours of GPS navigation on a single charge, making it suitable for extended trips with limited access to power.
The device supports GPS, GLONASS, Galileo, QZSS, IRNSS and Beidou. It features a rugged design, an IPX7 water resistance rating, and a compact, lightweight body that can be attached to a backpack or worn around the neck. Users can import GPX files and navigate to waypoints, courses and geocaches. It also includes a three-axis compass and can store up to a thousand waypoints, 50 courses and 200 activities.
Users can connect the eTrex Solar to their smartphones through the Garmin Explore app, which enables additional features such as geocaching details, weather updates, software updates, trip planning, and cloud storage syncing.
New Product Offerings Now featuring marine GNSS antennas
Photo: Geo-matching
Geo-matching has expanded its product database to include GNSS antennas. The initial marine GNSS antennas featured in this new category are the VP6300 from Calian GNSS, formerly Tallysman, and the AV34 from Trimble.
Geo-matching features detailed information on more than 1,300 products across 63 categories for surveying, navigation and machine guidance. The website is designed to guide users through complex product specifications, offering access to brochures, case studies, product videos and professional reviews. Among the many categories available on Geo-matching.com are hydrographic processing software, GNSS receivers, GIS software, inertial navigation systems, total stations, UAVs, sidescan sonars, imaging sonar and more. The platform encourages users to browse its extensive catalog, upload new products, leave reviews and register their companies to add products to the database.
Mapping UAV With a new “Smart Return-to-Home” feature
Photo: Flyability
Flyability has introduced a “Smart Return-to-Home” (RTH) feature for its Elios 3 UAV, designed to enhance its autonomous capabilities. This feature allows the UAV to return to its take-off point using the shortest available path while avoiding obstacles in real time.
During flight, Smart RTH monitors battery levels through a new flight management gauge, notifying the pilot when it is time to return. The feature is activated via Flyability’s Cockpit flight app, and pilots can take manual control at any point. By automating the return process, the system helps pilots focus on inspections without concerns about battery management or navigation in complex environments. Smart RTH uses lidar scans to generate a flight plan that the UAV executes independently.
The AirWarden Remote ID Receiver detects and decodes Remote ID signals broadcast by UAVs. It is designed for organizations and authorities that need to monitor UAV activity for safety, security and compliance with regulations.
It decodes the information transmitted by UAVs in accordance with FAA and other regulatory standards. The data it captures includes the UAV’s identification number, its precise location (latitude, longitude and altitude), the takeoff location, operator location if available, timestamps, and other relevant metadata.
The AirWarden can be deployed as a standalone unit or integrated into larger security and monitoring systems. Users interact with the system through a web-based or software interface that facilitates live monitoring, alert management, and data analysis.
Additionally, the AirWarden can integrate seamlessly with other security infrastructure, such as video surveillance and access control systems. This integration seeks to improve how security teams automate responses and coordinate actions when unauthorized or suspicious drone operations are identified.
u-blox has introduced PointPerfect Global, its new high-precision GNSS correction service designed for applications that require sub-decimeter positioning accuracy, such as precision agriculture, UAV-based mapping and autonomous outdoor robotics. The service offers global coverage, including remote areas, through both internet and L-band satellite broadcast.
PointPerfect Global is engineered to provide convergence times under two minutes and accuracy of less than 10 cm. It uses Precise Point Positioning with Ambiguity Resolution (PPP-AR) corrections and is optimized for products built on the X20 platform. The u-blox ZED-X20P GNSS receiver will be the first device to support the new service, offering integrated L-band support for use in areas without cellular connectivity.
PointPerfect Global expands the u-blox PointPerfect portfolio, which also includes PointPerfect Live, a regional nRTK service for the most demanding applications, and PointPerfect Flex, the original PPP-RTK service designed for flexible IoT deployments. Together, these services provide scalable, high-performance positioning solutions tailored to a range of technical and commercial requirements.
The broadcast-based architecture of PointPerfect Global allows for scalable deployment across continents without the need for complex regional integration. This approach is intended to simplify logistics and operational complexity for OEMs and solution providers, supporting a variety of sectors including agriculture, robotics, UAVs, industrial automation, and automotive. The service is designed to deliver reliable performance with minimal infrastructure dependency, which is critical for mass-market autonomy and global scalability.
Early access to PointPerfect Global is scheduled for late 2025, with general availability expected in the first half of 2026.