Raytheon Intelligence and Space has been awarded a contract from the United States Navy’s Naval Air Traffic Management Systems Program Office to deliver the Joint Precision Approach and Landing Systems (JPALS) to the Japan Maritime Self-Defense Force (JMSDF). The GPS navigation and precision landing system will be deployed on the JMSDF JS Izumo carrier.
The JPALS system guides aircraft onto carriers and assault ships in all weather and surface conditions and is integrated on all F-35 aircraft. JPALS is also being deployed on all U.S. Navy aircraft and assault ships.
In addition, JPALS will be deployed on two international platforms, including the United Kingdom Royal Navy’s HMS Queen Elizabeth, and an Italian aircraft carrier, the ITS Cavour, to support its F-35 squadron.
The primary work locations for JPALS are in Largo, Florida and Fullerton, California.
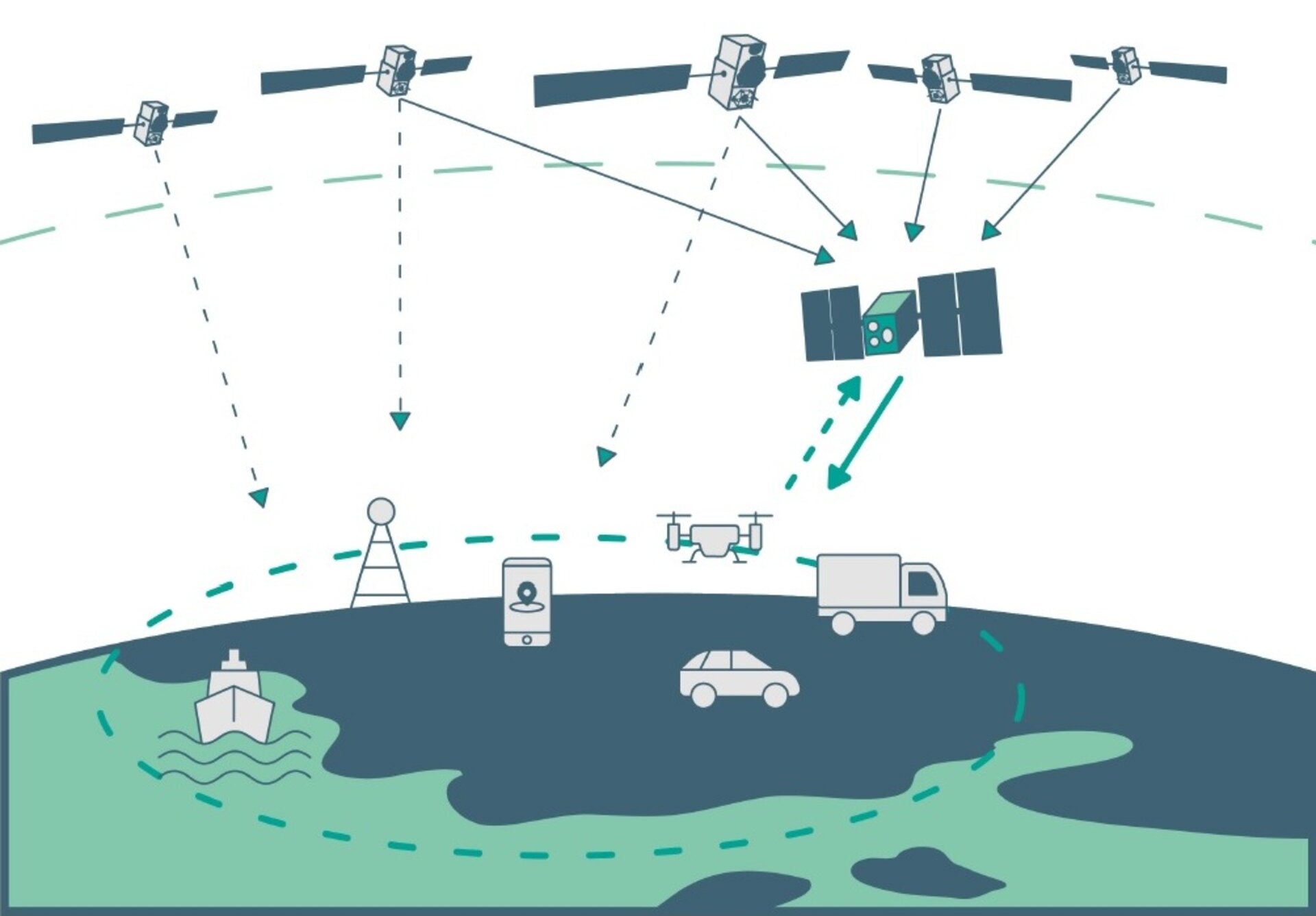
The European Space Agency (ESA) is in search of European companies interested in taking part in the in-orbit demonstration of a low-Earth-orbit (LEO) satellite navigation constellation utilizing novel frequencies and capabilities.
Those interested in participating are encouraged to attend ESA’s LEO-PNT Industry Day on March 7 at the ESTEC technical center in the Netherlands. The LEO-PNT Industry Day will give an overview of the project to companies, research institutions and ESA delegates from Member States.
A detailed invitation will be issued soon, covering all aspects of the LEO-PNT Orbit Demonstrator, including the space and ground segments, operations, launchers, the test user segment, experimentation, and segment demonstration.
Registration by Feb. 27 is required. To learn more, visit atpi.eventsair.com.
LEO satellites would supplement the existing Galileo constellation. (Image: ESA)
One Galileo satellite has been reconfigured to emit a new signal component optimized to serve low-end receiver devices and internet of things (IoT) applications. According to the European Space Agency (ESA), GSAT0202, in elliptical orbit, was reconfigured in January to transmit the new signal, also known as the G1 E5 Quasi Pilot.
The G1 E5 Quasi Pilot in the E5 band lies along a narrow part of the overall Galileo signal, intended to enable streamlined positioning fixes requiring less calculation — without affecting the E1 and E6 signal bands, on which Galileo also transmits. The initial receiver test showed that the signal component has the potential to reduce the signal acquisition time by a factor of three compared to the current GPS L5 or Galileo E5a signals.
Image: ESA
Once GSAT0202 was reconfigured, signal measurements were collected using the high-gain antenna installations from the Galileo in-orbit test facility, which confirmed the stability of the augmented signal. After G1 E5 Quasi Pilot was broadcast, it was successfully acquired and tracked by a set of receivers.
Airbus Defense and Space, Thales Alenia Space Italy, the European Union Agency for the Space Programme (EUSPA), the European Commission, and Spaceopal supported this test.
The other elliptical Galileo satellite, GSAT0201, will also be reconfigured after further testing. Selected chipset manufacturers will be involved in the testing under supervision of EUSPA. The test results will be evaluated at the Galileo Programme level, to eventually introduce G1 E5 Quasi Pilot into the constellation.
Hexagon’s Safety, Infrastructure & Geospatial division has released for Android defense applications. The platform is designed for the development of mobile applications for dismounted soldiers in the field.
With LuciadCPillar, developers can build applications with 2D and 3D views. It features military symbology and supports many geospatial data types including vector data, raster data, elevation data, point clouds and 3D meshes. It has the same capabilities found in desktops, in-vehicle and browser applications built with LuciadLightspeed, LuciadCPillar and LuciadRIA.
The platform offers capabilities to match high-resolution screens, graphic processing units and multi-core processors including the ability to display 3D data in mobile applications. LuciadCPillar supports ARM processors and an application programming interface, which aligns with the Android developer experience.
Impact, a French system integrator, partnered with Hexagon to test LuciadCPillar and will integrate it into its Delta Suite product, which is used by the French Special Operations Command.
LuciadCPillar is part of Luciad 2022.1, which is available now globally.
Atmos has integrated the Sony a7R mark III and IV camera into its vertical take-off and landing (VTOL) fixed-wing UAV, the Marlyn Cobalt. This will increase coverage and accuracy achieved in a single flight for surveyors.
Both cameras have an ISO of 32,000, which is expandable to 102,400, and camera sensors with high megapixel count — 42,4 MP for the a7R III and 61 MP for the a7R IV. When combined with Zeiss’ 35 mm and 21 mm lenses, it enables UAV surveyors to achieve ground sample distance levels below one 1 cm.
The integration of the two cameras enables Marlyn Cobalt users to map an area of 210 hectares with centimeter-level accuracy in a single flight.
Viavi Solutions has unveiled the PNT-6200 Series Assured Reference for resilient positioning, navigation and timing (PNT). Viavi acquired Jackson Labs Technologies in November 2022.
The PNT-6200 Series Assured Reference provides resiliency and robust cybersecurity for critical infrastructure.
The compact system can supplement or replace GPS signals based on connectivity to the broadcast range of timing sources in the market including other GNSS satellites, and commercial satellite, terrestrial, wireline, and atomic clock services. The PNT-6200 Series will draw the timing signal from the most reliable source and use it as a replacement for the GPS input, enabling continuous operation.
The PNT-6200 Series will be showcased at Mobile World Congress in Barcelona, Feb. 27-March 2.
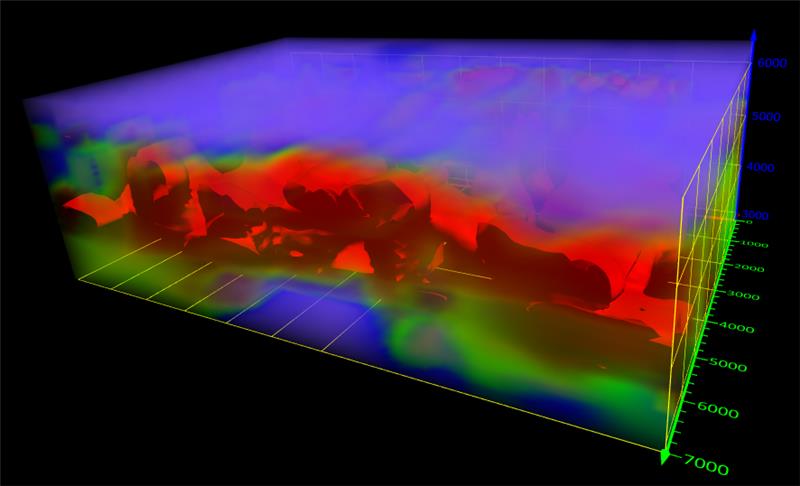
Golden Software’s Surfer package, designed for 3D surface mapping, now provides robust subsurface visualization and modeling functionality by incorporating many true 3D gridding and visualization tools.
With the enhanced functionality, users can now model an additional variable, a C variable, such as a contaminant or chemical concentration, along with the traditional X, Y, Z values. Surfer also includes the ability to create a 2D map of a slice-through 3D grid, which users can move up and down through the grid, illustrating how the C value changes with depth.
Part of Surfer’s enhancements is isosurface creation, enabling visualization of the 3D grid in the 3D view as an isosurface, providing another way to see how C data varies with depth or elevation. The new 3D-rendered volume functionality also allows users to visualize the 3D grid in the 3D view as a solid body by assigning colors to different C values, highlighting variations in the data.
Golden Software has released a beta version of Surfer simultaneously with the new version to give users a trial of the new features while they are still in development.
The company states that the software is suitable for geologists, geophysicists, hydrologists and environmental engineers.
TRX Systems has added a jammer finder capability to its NEON PT-MIL. The new function and expanded threat-mapping features enable dismounted soldiers to proactively respond to navigational warfare attacks (NAVWAR).
NEON PT-MIL helps warfighters carry out their missions even when operating in environments where GPS/GNSS signals are unreliable or intentionally denied. The device can detect and eliminate compromised GNSS data while providing an alternative source of positioning information by fusing inputs from inertial sensors, GNSS signals, ultra-wideband and more.
NEON PT-MIL can also be equipped to detect and map jamming and spoofing attacks. This feature was developed through a United States Army Rapid Capabilities and Critical Technologies Office program designed to extend NAVWAR functionality. The device accepts assured GNSS data from external devices — such as the Defense Advanced GPS Receiver, or DAGR, and the Orolia Defense and Security Broadsense Nano — to deliver a fused position and a NAVWAR threat indication when detected.
The device can also derive a line of bearing to an enemy jammer and display it within the warfighter’s Android Tactical Assault Kit (ATAK) user interface, by using the GPS jamming indications available from a connected GNSS source.
NEON PT-MIL with the jammer finding function is available in beta versions for field testing now and will be generally available in mid-2023.
The Linux Foundation has launched the Overture Maps Foundation, interoperable open map data for developers who build map services or use geospatial data and to strengthen mapping services globally. Overture expects to release its first datasets in the first half of this year.
Overture aims to deliver services including collaborative map building by incorporating data from Overture members, civic organizations, and open data sources, creating a global entity reference system, quality assurance processes to detect map errors and ensure map data can be used in production systems, and a structured data schema to create an ecosystem of map data. Additionally, map data is open and extensible to users under an open data license.
Founded by Amazon, Meta, Microsoft and TomTom to help developers source and curate up to date map data, Overture will integrate with existing open map data from projects such as OpenStreetMap and city planning departments, as well as with new map data contributed by members, to create a living digital record of the physical world using artificial intelligence and machine leaning techniques.
The initial release of datasets will include basic layers including buildings, roads and administrative information with plans to improve coverage, resolution and accuracy of existing data over time. It also will introduce new layers including places, routing and 3D building data.
Mobile mapping is helping accelerate the progression of some of the most difficult engineering challenges on the planet, including those around autonomous driving and advanced surveying techniques, such as lidar.
The complexity of those challenges means that the outputs from a mobile mapping inertial navigation system (INS) must be as accurate as possible. A high-performing INS will make the most of any available GNSS signals, with the aim of providing centimeter-level accuracy even in areas where GNSS performs poorly, for instance in urban canyons. It also offers important data on pitch, roll and heading, which maintains the integrity of survey data even as the vehicle moves across large areas.
With such a wide variety of INS devices on the market, it can be difficult to narrow down the best option. It is important to establish criteria that will aid in evaluating the different INS propositions out there for mobile mapping projects.
Image: OxTS
1) How tightly integrated are the inertial measurement unit (IMU) and GNSS data?
INS is an essential element in providing accurate location data in as many environments as possible. Therefore, it is important to know how effectively the data from the IMU supports the GNSS data. In technical terms, this means evaluating whether the sensors are tightly integrated at all, and if so, how well.
The reason GNSS struggles in urban canyons and under tree canopies is that it is unable to get the six satellite signals necessary for a real-time kinematic (RTK) lock. In this situation, the GNSS will give readings that may be incorrect, as it is essentially trying to solve an equation without having all the numbers.
A tightly integrated GNSS and INS data stream will select the most reliable signals and use those to determine the position of the vehicle. If the data streams are not tightly integrated, then the INS’ ability to counteract GNSS issues is limited. Without accurate positioning, data scans will lose accuracy and even become completely incoherent the longer the user scans — making them unreliable at best, and unusable at worst.
2) Trading off accuracy and cost
Although accuracy is vital in mobile mapping, some INS devices will provide data that is far more accurate than the given job requires. Because greater accuracy equals greater cost, users may be paying more than necessary.
With that being said, the scale of accuracy and cost is not linear. An INS half the price of the most expensive one on the market will not be half as accurate. Look at each offering carefully to see what it includes and decide what level of accuracy and features are vital to the task. Eliminating unnecessary levels of precision or additional software features that are not needed is an effective way to make some savings.
3) How rugged is the device?
Mobile mapping vehicles will likely be out in the dry, wet, hot, cold, mud and snow. These vehicles will almost certainly be used consistently for long periods of time. Thus, it is essential to know that none of these conditions will stop the INS from working at peak effectiveness. Look for the IP rating (IP65 is essential for being weatherproof and protecting against shocks and dust) and ask what the average lifespan of the product is.
Image: OxTS
4) Can the device be properly calibrated?
Any INS is only as good as its calibration. Without calibration, the sensors in any INS can become misaligned and therefore provide inaccurate readings. Talk to vendors about their calibration processes — do they work to a nationally recognized standard of calibration like ISO 17025? Do their calibrations account for variations in temperature or humidity?
It is also worth considering how often sensors need recalibration. Recalibration is a chargeable service from most vendors, meaning the more the device needs recalibrating, the more the user will have to pay. This could also lead to delays if the user must send units abroad to have them recalibrated.
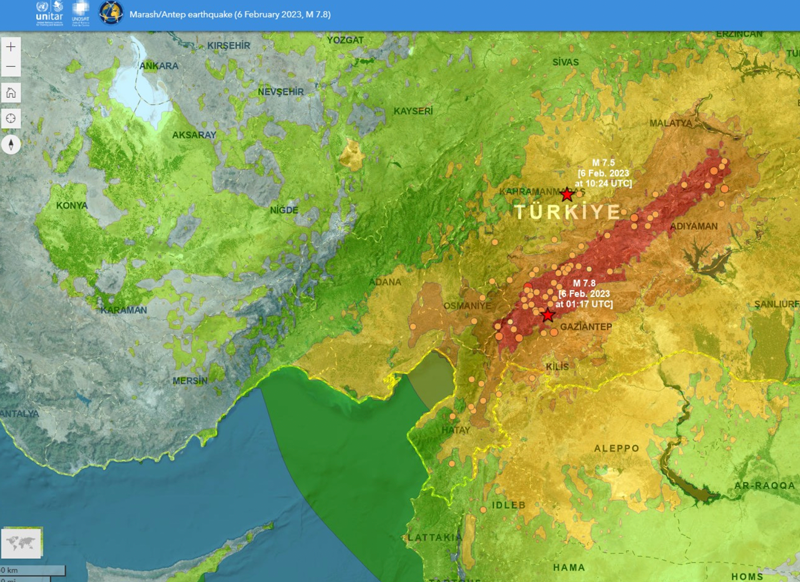
On Feb. 6, the United Nations Satellite Center (UNOSAT) announced via Twitter that it had activated emergency mapping services of Turkiye and northern Syria after the magnitude 7.8 earthquake hit earlier that day. The satellite images provide an overview of the damage, which can be used for humanitarian efforts and disaster relief, reported Space.com.
UNOSAT provides emergency mapping services, upon request, to provide satellite imagery analysis during emergencies and disasters. The maps show infrastructure that has been damaged during an emergency, which can then be used to provide relief by disaster response groups.
The impact of the earthquakes was significant and ranks in the red for economic losses and orange for fatalities, according to the U.S. Geological Survey (USGS). (Image: UNOSAT)
The earthquake caused massive destruction throughout Turkiye and Northern Syria, causing an estimated death toll of more than 19,000 as of Feb. 9. Several historical structures dating back thousands of years have also been severely damaged.
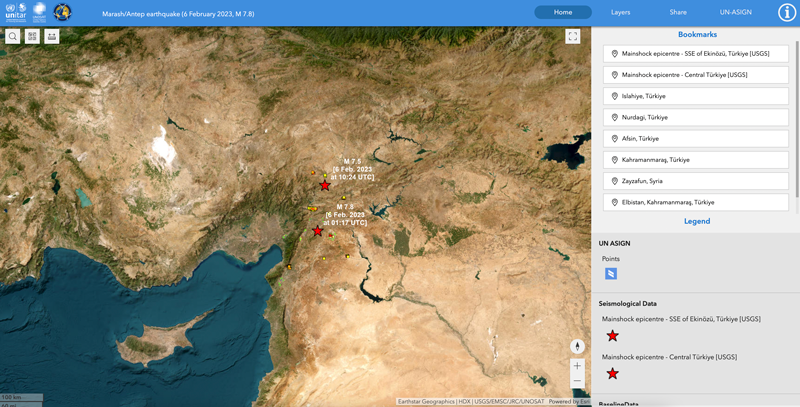
UNOSAT started in 2001 and is hosted by the European Organization for Nuclear Research. It does not operate its own satellites, but coordinates with United Nations member states to gather imagery from government agencies and privately owned satellites. United Nations offices, government agencies and relief organizations can request access to imagery collected by UNOSAT.
The USGS reports the earthquake resulted from strike-slip faulting at shallow depths. It appears to be associated with either the East Anatolia fault zone or the Dead Sea transform fault zone. (Image: UNOSAT)
All maps of Turkey and northern Syria from UNOSAT can be found here. A live interactive map can be found here.
Cepton has secured a multi-million-dollar contract from the United States Highway Tolling System Operator to use its Sora series lidar sensors. The sensors will be deployed on several major tollways in the tri-state area in Northern California.
The Sora lidars provide detailed and accurate 3D profiling of vehicles passing at highway speeds. The lidar sensors have been used to modernize global tolling infrastructure by facilitating electronic toll collection, reducing traffic congestion and toll leakage.
Image: Screenshot of video from Cepton
“In addition to superior performance, our Sora lidars were designed using the same auto-grade building blocks that have been validated by OEMs through our flagship automotive lidar program, and are reliable, embeddable, scalable and energy efficient, which are key advantages for tolling applications,” said Jun Pei, co-founder and CEO of Cepton.
The contract is expected to be the largest commercial lidar deployment in the tolling sector, with potential to scale outside the United States in the future.