The ping200XR TSO has received TSO-C112e and TSO-C166b for transponder and ADS-B functionality — TSO-C188b for its internal pressure altimeter, and TSO-C145e for the integral aviation GPS.
It is a compact Mode S ADS-B transponder with an integrated GPS receiver, measuring 47 x 72 x 10mm and weighing just 52 grams. This device combines the functionality of a transponder and GPS into a single unit, making it suitable for airspace access and operations involving certified aircraft.
The ping200XR facilitates seamless integration into national and international airspace systems by enabling aircraft detection by secondary surveillance radar (SSR), traffic collision avoidance systems (TCAS), and ADS-B IN receivers. Additionally, it has received technical standard order (TSO) certification from the FAA, ensuring that it meets specific performance standards established by the aviation regulatory body.
The ping200XR can be used in high-altitude aircraft and balloons operating in Class A airspace and above. With the new TSO certifications, the device can now be utilized in regions that mandate such approvals, including Europe, the United Kingdom, Australia and New Zealand. This certification also makes the ping200XR TSO a viable option for aircraft pursuing type certification, such as electric vertical take-off and landing (eVTOL) and Advanced Air Mobility (AAM) platforms. The certified version is scheduled to become available for purchase starting in September 2024.
SandboxAQ has been awarded an SBIR Phase 2B Tactical Funding Increase (TACFI) by the United States Air Force (USAF) to further develop its dual-use AQNav magnetic navigation (MagNav) system. Under the contract, SandboxAQ and its partner AFWERX will explore new configurations of the AQNav technology, including a pod-based attachment, for use on a broader range of aircraft platforms, such as unmanned aerial systems.
AQNav navigation technology combines proprietary artificial intelligence (AI) Large Quantitative Models (LQMs), powerful quantum sensors and the Earth’s crustal magnetic field, resulting in a solution that operates effectively in all weather conditions, day or night and across any terrain. AQNav technology is completely passive and operates in real-time, offering an unjammable and un-spoofable alternative to traditional navigation methods. This system functions entirely independently of GNSS, offering a secure and dependable navigation option in environments where satellite signals may be compromised or unavailable. This is a key example of applying quantitative AI – AI models trained on quantitative data and not language. SandboxAQ is a leader in Large Quantitative Models (LQMs), in this case to pull the signal from the background magnetic noise for navigation.
This funding increase extends a prior Direct-to-Phase-II SBIR contract awarded to SandboxAQ in January 2023. To date, SandboxAQ’s AQNav technology has logged more than 200 flight hours and more than 40 sorties across multiple regions on four different aircraft types, ranging in size from single-engine planes to large military transport aircraft. In this process, AQNav was successfully tested in two USAF exercises – Exercise Golden Phoenix and Exercise Mobility Guardian – Air Mobility Command’s largest exercise at the time.
AQNav uses a powerful quantum magnetometer system to acquire data from Earth’s crustal magnetic field, which exhibits geographically unique patterns – similar to a human fingerprint. AQNav uses proprietary LQMs to compare this data against known magnetic maps, enabling the system to quickly and accurately find its position. Due to the high sensitivity of foundational quantum sensors, AI algorithms are applied to improve the signal-to-noise ratio, removing any mechanical, electrical, or other interference that would impact the system’s ability to acquire its location.
AQNav is available worldwide and can be used in air, land, and sea applications. The system does not rely on visual ground features or satellite transmissions to function and is not affected by weather conditions. Additionally, AQNav’s passive technology emits no electronic signals, which reduces the aircraft’s detectability. It operates at room temperature, requires no shielding, and has a small form factor that can be integrated into a wide variety of platforms, from multi-engine airliners to unmanned aerial vehicles.
SandboxAQ is developing AQNav as a dual-use solution to address the need for resilience to GPS vulnerabilities, which extends societally and economically. In addition to the USAF, SandboxAQ is engaged with several aerospace leaders to test and develop AQNav, including other allied governments, Boeing and Acubed — Airbus’s Silicon Valley research and innovation center.
onocoy has launched the onocoy real-time kinematic (RTK) service designed to offer positioning capabilities worldwide.
The service utilizes blockchain technology and a decentralized network of reference stations, offering users accurate correction data for applications requiring centimeter-level positioning. onocoy RTK offers global coverage with data quality controls in place to verify correction information before distribution.
According to onocoy, the service offers quick convergence times and high accuracy due to its dense network of reference stations. It outputs data in the standardized RTCM format for integration with various systems.
onocoy RTk targets industries such as agriculture, construction, mining, robotics and autonomous systems that require flexible and reliable high-precision positioning. onocoy says it is also developing business-to-business offerings, including access to station data and customized solutions.
With this launch, onocoy aims to expand access to RTK technology and advance high-precision positioning capabilities across sectors.
In June, the Navigation Innovation and Support Program (NAVISP) Advisory Committee (NAVAC) of the European Space Agency (ESA) issued a paper titled PNT Vision 2035. It provides an interesting overview of the state of positioning, navigation and timing (PNT) and where it will be a decade from now.
According to ESA’s website, key findings in the paper include:
Increasing Dependence on PNT Services – particularly for consumer and autonomous solutions. Accurate timing remains a critical use case, especially in telecom and power distribution.
Geopolitical and Technological Challenges: Rising cyber-attacks, jamming and spoofing, advancements in AI, ML and quantum computing will have significant impacts. Anticipate new regulations.
Technological Trends Driving PNT Demand: The proliferation of connected devices (IoT), autonomous driving, advanced air mobility, smart grids and autonomous vehicles will drive the demand for resilient and robust PNT.
System Architecture Evolution: Future PNT systems will utilize a combination of data sources, including multiple GNSS constellations, cellular networks (5G/6G), terrestrial systems, augmentation systems, and autonomous sensors. This “system of systems” approach will enhance performance and ensure independence from single points of failure.
Emerging Technologies and Sensor Integration: Advances in space segment technologies, receiver designs and sensor integration, new signal designs, flexible payloads, advanced clocks, inter-satellite links, and higher power amplifiers are highlighted.
Luis Mayo
We spoke with Luis Mayo, NAVAC’s chair, to get his take on this seminal work.
Question: To set the stage, what is NAVAC?
Luis Mayo: NAVAC is a group of external PNT experts that ESA has assembled to provide independent advice on navigation issues, and especially for NAVISP.
Q: Where can NAVAC’s formal recommendations be found?
Mayo: We perform an assessment of the NAVISP status every two years. We provide our recommendations as a conclusion of this assessment. Beyond that, our formal recommendations are collected in documents like this white paper or in proposals for modifications or adjustments to the work plans of the programs.
Q: How does ESA leadership generally view and react to NAVAC conclusions and recommendations? Does it act upon every recommendation?
Mayo: They are generally receptive. However, we are just an advisory body, so it is up to them to take on our recommendations. They often do so and use our advice to add weight to their proposal to the Navigation Programme Board, but they do not necessarily have to.
Q: PNT Vision 2035 is a substantial document. Clearly it involved some time and effort. Why was it written? Is it something ESA requested?
Mayo: The paper was the initiative of NAVAC members to inform the ESA Ministerial Conference in 2025. These conferences take place every three years to define the roadmap for the next period. New European space programmes, extensions or redirections of existing ones, and budgets are approved at these meetings.
Q: We thought we might make a modest contribution to the definition of the future ESA navigation programmes. What, if anything, did NAVAC find surprising or unexpected about findings included in the Vision?
Mayo: I would say that we hardly found anything too unexpected or surprising. The findings are the conclusion of multiple discussions on the subject over the past few years. We have just expressed them in a more articulated way.
If anything, and from my personal perspective, I would like to highlight that this exercise helped me realize that the deployment of some of the most exciting or expected applications of PNT technologies — such as autonomous driving — depend on the development and deployment of multiple other technologies that might not be necessarily available in the mid-term.
AVAC’s first meeting in 2018. From left to right: Javier Benedicto, ESA Navigation Director, and NAVAC members Alessandra Fiumara, Peter Grognard, Giorgio Solari, Rafael Lucas Rodriguez, Pierluigi Mancini, Roger McKinlay, Stefano Debei, Nityaporn Sirikan, Bernd Eissfeller and Luis Mayo. (Photo: ESA)
Q: What are the three most important things policymakers should understand from the document?
Mayo: First is that many infrastructures or services critical to the daily lives of the citizens are dependent on PNT technology.
Second, they cannot take for granted that GPS or Galileo services will be always available, not to mention GLONASS or BeiDou. Satellite navigation systems are vulnerable and are continuously under threat. Enabling assured PNT service is a must.
And third, there is more to PNT than satellite navigation. Other complementary or alternative technologies should not be abandoned. In fact, some of those technologies might even change the way in which we have traditionally conceived satellite-based navigation.
Q: What are the most important things policymakers should do to enable the PNT needed by 2035?
Mayo: I think they have to sustain the existing satellite-based navigation systems and foster the development of new technologies and systems that improve the robustness of the services. We have done a lot so far to provide PNT services globally. When you come to think of that, it’s really wonderful what we have achieved this far. We cannot afford to lose what we have, but that has proven not to be enough. Therefore, policymakers should keep helping the development of new technologies and services that complement what we have, improve the quality of the services and ensure its continuous availability and integrity.
They should also look beyond the current service volume. Spacefaring nations should be aware of the fact that they will need this kind of technology to support future missions. Deploying systems able to provide PNT services beyond the coverage of the current GNSS is an absolute necessity to support such missions.
Q: The vision says the EU must consider no longer having access to GLONASS and BeiDou. There are a number of threats that are common to all GNSS. Why not consider loss of access to all either temporarily or permanently?
Mayo: We have not considered a completely catastrophic situation such as losing access to all GNSS in our vision. We understand that GPS, Galileo and eventually other constellations or augmentation systems will remain available and provide at least partial coverage for PNT services.
Q: The vision makes recommendations about mitigating interference, using AI and extending the GNSS service volume. What else should policy and technology decision-makers take from the document and act upon?
Mayo: We must not forget there is a clear case for investing in future PNT systems. ESA should keep up to pace with foreign competitors that seem ready to increase their expenditure in these types of problems.
They also have to be conscious that satellite-based navigation is not enough. We have to look for alternative and complementary systems to reach the level of confidence that we need on PNT solutions.
Q: Perhaps you are thinking of all the PNT systems China has deployed?
Mayo: I am really thinking about what we are not doing in Europe or in the United States. We need to build alternatives that might not have global coverage but would allow us to maintain essential PNT services running at home.
Q: Resilience seems to be an important theme in the document, but it was not the subject of a specific recommendation. Could you speak to that?
Mayo: Resilience is a pervasive theme throughout the whole document. This is a major concern. We have to find a way to build a system of systems that can deliver to the user a trustworthy PNT solution at any time.
Resilience is, today, a key consideration in PNT, and we cannot do anything but acknowledge this fact. We might not have insisted enough on the importance of this feature for future PNT systems, but policymakers must undertake any actions required to improve the resilience of the existing PNT systems and services, probably by promoting the development of alternative independent PNT systems.
Q: What else should GPS World readers know about the Vision?
Mayo: Read the document. It is not that long. Also, think that it has been written from an independent and experienced standpoint. We at NAVAC do not pretend to hold the full truth, but I believe that we have a quite comprehensive view of the matter and that this would be useful for the reader.
The Federal Communications Commission (FCC) has issued a public notice seeking comment on NextNav’s filing to reconfigure the Lower 900 MHz band (902 to 928 MHz band).
This action comes in response to NextNav’s April 2024 filing, which proposes a comprehensive restructuring of the band to enable the deployment of a 5G terrestrial positioning, navigation, and timing (PNT) network.
NextNav’s proposal aims to create a 5 MHz uplink in the 902-907 MHz band paired with a 10 MHz downlink in the 918-928 MHz segment. This reconfiguration is designed to complement and serve as a backup to GPS while also freeing up spectrum for 5G broadband services.
NextNav CEO Mariam Sorond said the spectrum band reconfiguration complements GPS to continue location mapping and tracking services and national security needs. “Our plan creates abundance from scarcity in this band by unleashing much-needed spectrum for wireless technology. These common-sense solutions can benefit consumers and our national interests at no cost to taxpayers,” Sorond said.
However, the FCC’s public notice raises several questions regarding the protection of incumbent users, including federal radiolocation systems, industrial, scientific, and medical (ISM) equipment, and unlicensed Part 15 devices. The Commission seeks input on how these existing operations would be safeguarded under NextNav’s proposal.
Comments are due Sept. 5, 2024. Following this comment period, the Commission will review the feedback to develop proposed rules for the potential reconfiguration of the Lower 900 MHz band.
AUKUS, the trilateral security partnership between Australia, the United Kingdom and the United States, deployed autonomous and artificial intelligence (AI)-enabled sensing systems during the Resilient and Autonomous Artificial Intelligence Technology (RAAIT) trials, showcasing advancements in their Pillar II advanced capabilities initiative.
The trials took place at multinational Project Convergence exercises hosted by the United States Army. Military personnel from the three AUKUS nations tested autonomous and AI-enabled sensing capabilities in a multi-domain battlespace—land, maritime, air, and cyber—that minimized the time between sensing enemy targets, deciding how to respond, and responding to the threat.
Once integrated into national platforms, these new sensing systems are designed to provide more reliable data, which can enable commanders to make optimal decisions and allow service members to respond more quickly to kinetic threats.
During the RAAIT exercise, a sophisticated plug-in for the Tactical Assault Kit (TAK) demonstrated impressive capabilities in enhancing military operations. This map-based software application allowed a UK RedKite UAV to dynamically detect opposing force locations by making real-time adjustments based on collected data. Simultaneously, a second UAV provided high-resolution imagery for confirmation. The integrated system seamlessly transmitted this critical information to the Tactical Operations Center (TOC), where a designated “AI officer” provided essential human oversight. Upon verification, the officer authorized an Australian XT-8 UAV to execute a simulated strike. The success of this TAK plug-in has prompted the U.S. Air Force Research Laboratory (AFRL) to plan its wider distribution, showcasing the potential for enhanced interoperability among AUKUS partners.
“It used to be that each nation used its own datasets to develop separate models and deploy those models on their own platforms. Under RAAIT, we’ve matured the AI pipeline, focusing on interchangeability and interoperability, which allows for any combinations of datasets, models, algorithms and platforms to be used across all three nations,” said Dr. Kimberly Sablon, the Principal Director of Trusted Artificial Intelligence and Autonomy in the Office of the Under Secretary of Defense for Research and Engineering.
Lessons learned at the RAAIT trials will be used for future training events. The AUKUS Artificial Intelligence and Autonomy (AIA) Working Group hopes to use these findings to develop an AIA ecosystem that will one day enable the three partner nations to share data for operational success in contested environments.
The President’s National Space-based Positioning, Navigation and Timing (PNT) Advisory Board has warned United States leaders that the nation is highly vulnerable to disruption of GPS services. Also, national PNT issues have not received sufficient priority and attention for the last 20 years, and no one is accountable for system performance.
The overwhelming majority of Allen’s message, though, dealt with GPS and U.S. PNT being vulnerable, the importance of PNT to the nation’s safety and security and the failure of the government to do the things it said it should and would do. It says:
“America’s continued over-reliance on GPS for PNT makes critical infrastructure and applications vulnerable to a variety of well-documented accidental, natural and malicious threats.
…our conclusion is that PNT, in general, and GPS, in particular, have not been accorded their rightful prominence in the national policy agenda.
Simply put, the Board believes that the 20-year-old framework for GPS governance and the current policy statements establish neither the priority that the system deserves nor sufficiently clear accountability for its performance.”
The reason for this was assessed to be that the leadership and governance structure established by 2004’s NSPD-39 and confirmed in 2021’s SPD-7 was not working.
Allen gave a recent policy document on critical infrastructure as an example. All critical infrastructure sectors use PNT, and most depend on it.
“These findings were reinforced just earlier this year by the release of the National Security Memorandum on Critical Infrastructure Security and Resilience (NSM-22, April 30, 2024). We were surprised to discover that GPS is nowhere mentioned in that important document.”
While not mentioned in the memo, PNT was also not mentioned in national cybersecurity documents issued last year. This is despite timing being essential to the operation of IT systems, and time and location data being key elements in many applications.
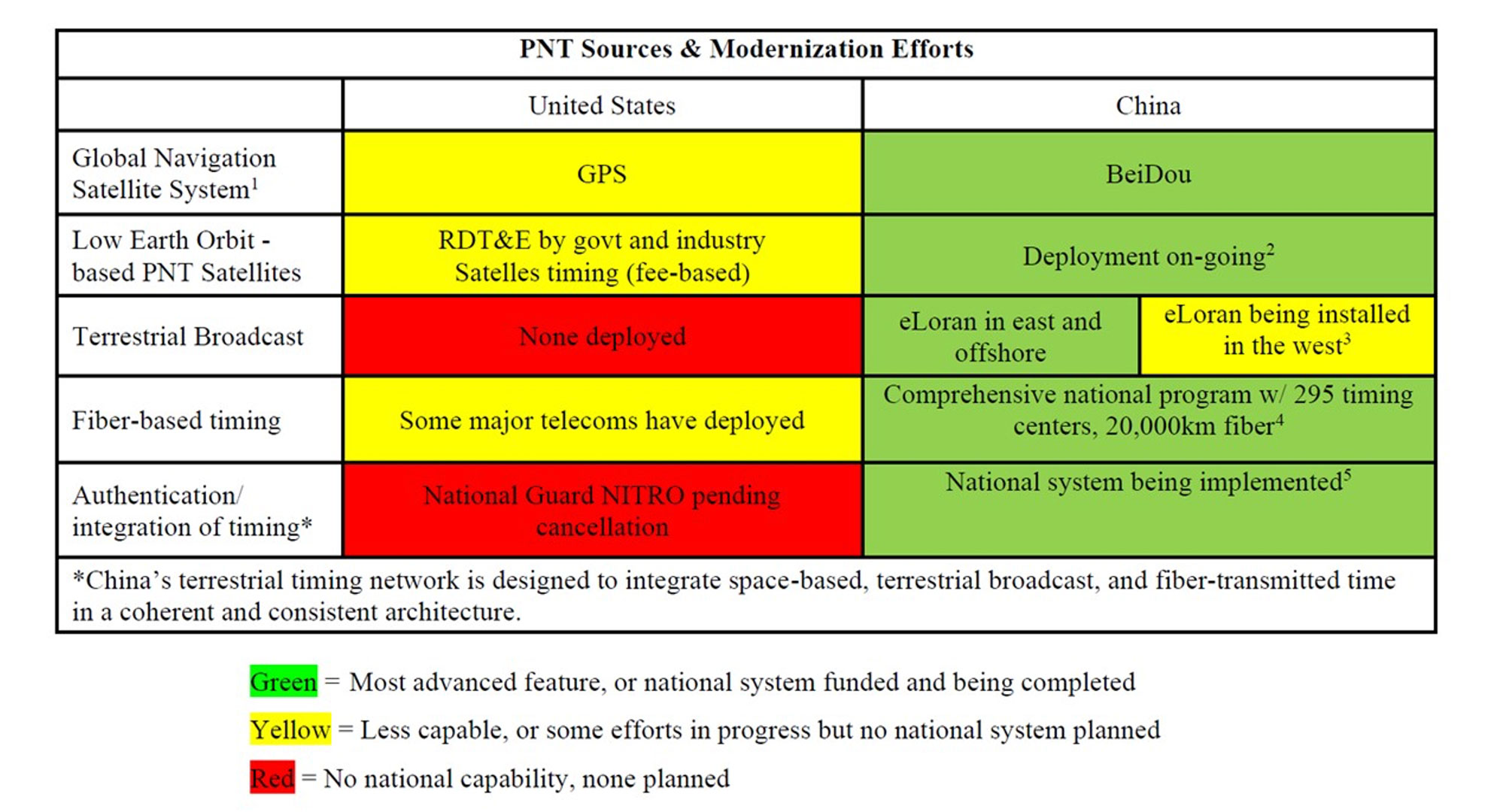
Allen’s memo also emphasized that the real issue is not about GPS, but overall national PNT capability. He went so far as to say, “Space Policy Directive 7 (SPD-7), U.S. Space-based PNT Policy, must be revisited and the term ‘space-based’ should be removed from its title” (emphasis added).
Reinforcing this message, the following table comparing U.S. and Chinese national PNT systems was included in the memo.
“The Board believes it is time to take a fresh look at our approach to PNT governance and establish a clear strategy for re-establishing an unquestioned position of leadership for the United States. To be successful, such a strategy requires a governance structure characterized by clearer authority and accountability. Ideally, the administration should propose legislation to Congress that would support this goal with a clear mandate (authorization) and resources (appropriations) adequate to the task.”
Direct the U.S. Space Force to establish a way for “good enough” monitoring of GPS L5 signals using existing capabilities and set L5 signals healthy subject to a “use at your own risk” caveat, just as is done with L2C today. We recommend establishing a deadline of September 2024.
Direct federal Chief Information Officers to acquire and install multifrequency dual-system (GPS-Galileo) receivers to complement GPS use. The Department of Transportation and the Department of Homeland Security should actively encourage critical infrastructure users to adopt multifrequency dual-system (GPS-Galileo) receivers.
Assign a lead agency and single individual with clear responsibility and authority for the end-to-end prompt detection, characterization, and removal of significant sources of interference to GNSS in the United States.
Allen’s memo comes on the heels of a similar warning to United States leaders about the nation’s vulnerability to GPS disruptions. On July 18, the
For the fourth consecutive year, Saildrone and the National Oceanic and Atmospheric Administration (NOAA) are sailing a fleet of uncrewed surface vehicles (USVs) into hurricanes to better understand how these storms develop, track and intensify.
Saildrone Explorer USVs are 23 ft long and carry a payload of sensors to measure air, surface and water temperature as well as humidity, barometric pressure, wind speed and direction, salinity and wave height. To withstand major hurricane conditions—winds over 110 mph and waves that exceed 50 ft—they have a shorter and stronger “hurricane wing,” similar to a reefed sail on a sailboat.
Saildrone USVs sail autonomously along prescribed routes, which Saildrone Pilots define according to weather conditions and to meet mission objectives. Saildrone’s science partners in the mission at NOAA’s Atlantic Oceanographic & Meteorological Laboratory (AOML) and Pacific Marine Environmental Laboratory (PMEL) will work closely with Saildrone Mission Control to guide the saildrones into oncoming hurricanes.
As the final group of saildrones was readied for deployment, Tropical Storm Debby was forming in the Gulf of Mexico. Just days after SD-1057 was deployed, the USV sailed through the eye of Hurricane Debby hours before the storm made landfall in Florida. Powered solely by renewable wind and solar energy, the Saildrone fleet will stay at sea for the duration of the mission, which will last through October 2024.
The Spirent PNT X. (Photo: Spirent Federal Systems)
Developers and manufacturers of GNSS receivers have always needed to simulate the signals from GNSS satellites to test receivers in their labs and in the field. Now, as the vital role of GNSS for critical infrastructure and the growing threat of radiofrequency attacks are increasingly recognized, simulators must keep up. In particular, they must enable users to test a variety of new positioning, navigation and timing (PNT)signals from satellites in low-Earth orbit (LEO) and geostationary orbit (GEO), as well as realistically simulate sophisticated jamming and spoofing attacks.
In this cover story on simulators, we discuss these challenges with experts at four simulator manufacturers:
John Clark, Vice President, Engineering, CAST Navigation
Lisa Perdue, Product Line Director, Safran Federal Systems
Jan Ackermann, Director Product Line Management, Spirent Communications, and Paul Crampton, Senior Solutions Architect, Spirent Federal Systems
Avag Tsaturyan, Systems Engineer, M3 Systems.
How are the missions/applications of simulators changing?
Clark: Our customers have been requesting larger simulation systems that can support GNSS and inertial navigation systems (INS) on multiple vehicles simultaneously. Each vehicle is required to support a phased-array (CRPA) antenna sub-system, multiple INS interfaces and signal interference capabilities. This is a change from earlier times when our customers required smaller systems with less capability.
Perdue: We see a growing focus on testing NAVWAR scenarios and assessing receiver performance against diverse threats. The increasing complexity of receivers with multiple constellations and frequencies demands more advanced simulation capabilities. We provide comprehensive PNT simulators that support hybrid scenarios, in which simulated signals and threats are combined with live signals and sensors, creating a dynamic and realistic testing environment.
Crampton:For many years, simulators have been used to prove the capability of receivers and the systems into which the receivers are integrated. Testing ensures that receivers can perform as expected, including performance in boundary cases, which are tricky to recreate in live-sky conditions.
Over time, threats to navigation and timing performance began to dominate the schedules of test labs. Ensuring reliable performance in suboptimal operating environments is critical to receiver users. The workload of test labs has increased to the point where test automation has become necessary, not only in terms of increased efficiency but also just to keep pace with rapidly evolving threat profiles.
So, one of the main changes we are seeing is the need to speed up the innovation cycle with simplified, automated testing while maintaining test fidelity and robustness. Spirent simulators are enabling testing to “shift left,” to start testing earlier in the development cycle with digital twins — software-only models of receivers and devices — to shorten the time spent on R&D.
Ackermann: Increasing efficiency, flexibility and realism have been critical drivers in the simulator industry for many years and will continue to drive us forward at an ever-increasing pace. Precision and robustness requirements demand more signals and sensor fusion, which need to be supported by simulators. Greater realism and flexibility means that more representative testing can be done in the lab, saving time and money.
On the other hand, while lab testing has grown ever more realistic, there are times where in-field verification is required — simulators have had to become more flexible to address this “augmented reality” test environment and optimize field testing. Simulators are being used on ranges to enhance testing, using combinations of real and simulated signals — including resiliency tests that incorporate live-sky signals.
Are new markets for simulators emerging?
Clark: Yes, as the world evolves and circumstances change, the ability to validate proper operations of GNSS and GNSS/INS navigation systems under less-than-optimal conditions has become challenging. The use of simulators can greatly enhance your understanding of the behavior of a navigation system, thus allowing for more reliable navigation error planning and mitigation when these errors do occur. This has become a much more important area of concern as the automated navigation and integrated navigation markets mature.
Perdue: Yes, new markets are emerging in areas such as autonomous vehicles, UAV swarms, urban air mobility and space exploration, including lunar missions. Additionally, the growing focus on cybersecurity and electronic warfare has increased the demand for simulators that can replicate complex cyberattack scenarios and electronic threats.
Ackermann: New markets for simulators are constantly emerging. As PNT impacts more and more areas of our lives, the geographic and technological spread of simulator requirements continues to expand. Even in existing segments we see new market needs. In automotive, for instance, the emergence of a wide range of safety-critical functions such as intelligent speed assist (ISA) and eCall drive new simulation needs.
From the emergence of the LEO market to the development of LEO PNT constellations, these markets appear and evolve at a rapid pace. Spirent simulators can be used to generate novel and established signals from LEO PNT constellations with ultra-realistic orbital models for complex rotational effects and satellite parameters. The emerging focus on lunar missions from space agencies around the world means new test environments, more stringent requirements, and the potential for new signals outside of L-band, at S-band and beyond.
Crampton:Increasing the realism of testing continues to open new opportunities for simulator use. Spirent provides an all-in-one alternative PNT solution for ultra-realistic LEO modeling, inertial emulation, L and S-band signals, etc. — to be fused and tested in unison.
Senior Software Engineer Neil O’Brien utilizing a CAST-8000 GNSS Simulator to analyze CRPA trajectory data. (Photo: CAST Navigation)
Are simulator requirements changing?
Clark: In the past our customers were focused on the simulation of a single element of GNSS signals and a single INS output interface for the testing of vehicles that only supported single element antenna (FRPA) and a single INS capability. Our customers are now requiring simulator systems that produce multiple elements of phase-coherent GNSS signals that are commensurate with multiple INS interface outputs to drive navigation systems that can utilize a phased-array multiple-element antenna sub-system (CRPA) and multiple INS sources simultaneously.
Perdue: Yes, simulator requirements are always evolving. High signal counts are essential due to the increase in LEO constellations, and there’s a need to replicate multiple threats to create realistic environments. Built-in automation is crucial for managing these complex scenarios. The ability to add custom signals and constellations is necessary for experimenting with new technologies. Our software-defined architecture allows for quick integration of new signals, ensuring flexibility and responsiveness to changing needs. Innovations such as a radio utilizing the RFSoC to provide a high number of multi-frequency outputs from a single system and the BroadSim Duo, which offers dual-frequency capabilities in a compact form factor, demonstrate our approach to meeting these evolving requirements.
Ackermann: As new markets and use cases emerge, the simulator requirements evolve. The growing prevalence of NAVWAR threats, such as GNSS jamming and spoofing, and the range of systems these attacks are impacting is enhancing the criticality of lab testing.
Whether seeking to gain battlefield advantage or to secure civil operations (aviation, for instance), the ability to generate a wide range of NAVWAR attack vectors in complex scenarios is needed like never before. New waveforms must be incorporated quickly and realistically, while defensive technologies such as CRPAs must be exercised with a higher level of precision.
Crampton: Due to the demand for flexible attack vectors and the expanding range of available signals, simulators need to be capable of generating authentic RF environments from novel, user-defined waveforms. A time-saving method has been developed using prerecorded I/Q files. Spirent’s sixth-generation solution, PNT X, accepts raw I/Q data, analyzes the environment and the dynamic movement between receiver and transmitters, and automatically applies the correct motion effects to the generated RF signal. The simulated signal now has real-world dynamics without the need for manual inputs from the user. Realism made simple! Additionally, multiple I/Q-defined transmitters can be seamlessly integrated with native 3D terrain-modeling capabilities to create rich RF environments with multipath and obscuration.
A continuous, dynamic range is required to better replicate high-power jamming threats for controlled reception pattern antenna (CRPA) testing. With PNT X, high-power jammers can be simulated from the moment they become part of the noise floor to when a vehicle, such as an aircraft using a CRPA, passes by it. This continuous range enables CRPA developers to characterize null-steering ability with greater precision than previously possible.
Ackermann: As previously mentioned, there is also a growing need for integration and automation. Systems need to work in concert, and testing needs to happen quickly and efficiently to stay ahead of markets and threats. To this end, the ability to automate and to control remotely, and the ability to integrate seamlessly with other simulation and control systems, are core requirements for modern labs. Spirent is simplifying and automating testing with support for multiple industry-standard frameworks.
In established markets, safety requirements on devices under test drive simulator needs. For instance, functional safety requirements for automotive applications demand the ability to simulate threats and events, while the fidelity requirement of the simulation is elevated to assure conformance.
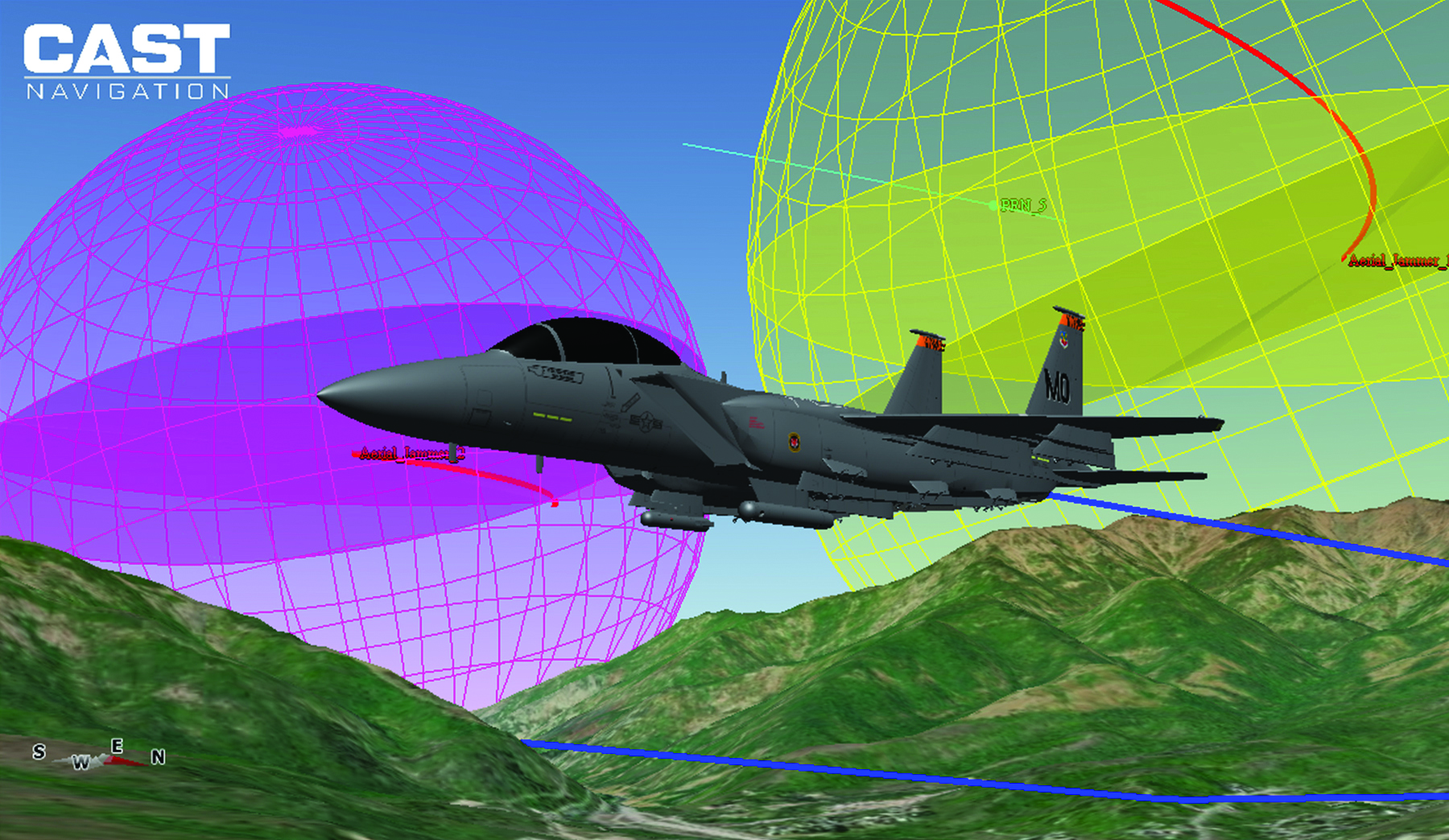
3D view of an aircraft flying a simulation. (Photo: CAST Navigation)
What mix of signals do you support?
Clark: GPS L1/L2/L5, L1C, L2C, C/A, SBAS, P, Y, SAASM, M-Code AES and MNSA, Glonass and BeiDou
Perdue: We support a wide array of signals, including GPS, GLONASS, Galileo, BeiDou, and regional systems such as QZSS and IRNSS. Additionally, we incorporate alternative navigation signals, such as those from Xona, and support inertial navigation and timing signals. Our software-defined architecture enables us to handle high signal counts and allows for extensive customization, ensuring we can simulate any required signal environment. This flexibility ensures we meet the diverse needs of various industries and applications, from aviation and maritime to autonomous vehicles and defense.
Ackermann:Spirent supports all open service GNSS signals and classified GPS testing — including M-Code Regional Military Protection — as well as PRS (through prs[ware] and our partnership with Fraunhofer IIS) on our simulation platforms.
In addition:
Regional systems (e.g., NavIC or QZSS)
S-band frequency signals
Custom non-ICD signals
LEO PNT (Xona Space System’s PULSAR and others)
A broad range of interference waveforms, including CW, FM, PM, wideband AWGN, chirp, matched spectrum, etc.
Generation of RF from I/Q data injection in L-band and S-band frequencies
Correction/augmentation
Inertial sensor emulation
Furthermore, the ability to geolocate custom RF beacons either in a range of orbits or in terrestrial locations adds huge signal flexibility.
What are the key challenges you face?
Clark: As our customers’ needs grow and evolve, some of our key challenges have been the ability to continue to evolve our product utilizing cutting-edge technology while still maintaining backwards compatibility with our older technologies. Efforts like this give our customers peace of mind when making a system purchase and enable them to take full advantage of prior purchases when requirements change and system enhancements are necessary.
Perdue: A key challenge is creating complex simulation environments that require specialized expertise. Customers often lack the knowledge to design these environments effectively. Ensuring simulation accuracy and cybersecurity are significant concerns, especially as new threats emerge alongside new technologies developed to combat existing threats. Translating performance requirements into practical specifications and meeting stringent industry standards adds another layer of complexity. We address these challenges through continuous updates and close collaboration with our customers to ensure our solutions meet their evolving needs.
Ackermann: For 40 years, we have faced a challenge that, to some degree, is being addressed. Namely, PNT is not widely standardized and therefore test requirements are highly diverse. The scale of Spirent and the empowering flexibility of our systems enables us to overcome this, but it remains challenging.
The current geopolitical situation also presents challenges, as the number of threats and the potential for negative events demand ever-increasing sophistication in testing. That’s why we built PNT X with high-power jamming and spoofing capability for greater realism and accurate test results.
Crampton: The complexity of next-gen positioning engines means that our systems have to integrate and interact with other systems, built by other companies with other protocols and specifications. Spirent maintains the precision and stability our customers expect from us while incorporating an open and controllable architecture for easier plug-and-play in complex hardware-in-the-loop environments.
M3 SYSTEMS
Please introduce your company.
Tsaturyan: We represent the Mistral Group, which includes three distinct companies: M3 Systems France, M3 Systems Belgium and Boreal. M3 Systems France teams provide GNSS simulation and test and measurements solutions and radionavigation and signal processing expertise. M3 Systems Belgium teams are experts in air traffic management (ATM) studies. Boreal teams offer beyond-line-of-sight missions for maritime surveillance, Earth observation, and scientific experiments with the BOREAL long-range unmanned aircraft. Each company extends its scope to the challenges of GNSS and UTM with an integrated approach.
What are your key markets? What challenges are you addressing?
Our customers are from different industries: we work with space agencies — such as France’s Centre National d’Études Spatiales (CNES) and the European Space Agency (ESA) — private R&D labs and automotive companies and railways. We propose GNSS simulation products such as the Stella GNSS simulator, which allows users to simulate a vehicle in a realistic environment and in real time for low latency. Our simulator is designed to reproduce the sky with high precision. The GNSS signal passes through different layers, each one of which has a different effect. First, there can be an error in the satellite clock, then there can be a delay as the signal passes through the atmosphere, then, on the ground, there is a risk of a spoofing or jamming attack and, in urban areas, multipath from buildings.
What signals does your simulator support?
Our GNSS simulator is multiconstellation and multi-frequency. It supports all the available GNSS signals and frequencies. Users can simulate multiple antennas and multiple trajectories, custom atmosphere and multipath effects. We offer several built-in models of multipath. Users also can use their own multipath models and even integrate it with an SE-NAV multipath simulation tool. We also have several built-in jamming signals that users can apply and spoof the real signal coming from the antenna or spoof the simulated signal. Our setup now also supports Galileo’s Open Service Navigation Message Authentication (OSNMA). Our Stella GNSS simulation software can run on three different products designed for specific needs: the Stella GNSS Simulator Base (based on NI’s USRP kit), the Stella GNSS Simulator Suite (based on our bundle), and the Stella GNSS Simulator Advanced (based on NI’s VST). Our VST-based solution is optimized for tests that require high performance in terms of calibration — such as simulating a CRPA antenna, where the channels need to be very tightly synchronized.
Photo: M3 Systems
What does your Stella Suite do?
The Stella GNSS Simulator offers up to two independent RF simulations, enabling simultaneous simulation and the jamming/spoofing or the simulation of multiple antennas and trajectories.
Our simulator suite is basically an all-in-one device that allows users to plug in a receiver. This single device enablesusers to simulate jamming, spoofing, multiple antennas or multiple trajectories.
When did you launch this product?
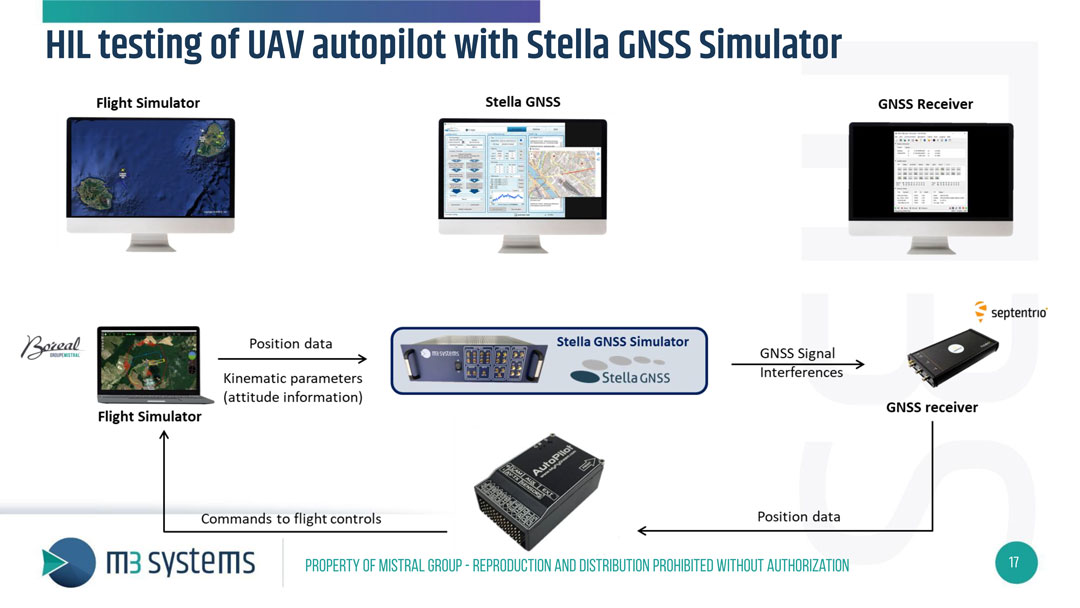
We released it and demonstrated it during Emerson NI’s “NI Connect” event. They have an annual event in May in Austin, to which they invite all their partners and customers. This year, we were invited there to present our new simulator. We brought a HIL test setup to demonstrate the new configuration of our GNSS simulator: a closed-loop test of a drone autopilot system. When kinematic parameters from the flight simulator are simulated, the trajectory is sent to the Stella GNSS simulator, which then generates the GNSS RF signal and interference to assess the receiver’s performance. The receiver then passes its positioning data to the autopilot, which sends the commands to the flight control unit in the flight simulator. It’s one of the use cases, because to fully test the receiver, in addition to the nominal situation, it is also necessary to introduce some errors — such as interference, jamming, spoofing or meaconing.
What are some other use cases for this simulator?
Another use case is the test of Advanced Driver Assistance Systems (ADAS) in a 3D simulation environment. Basically, it is designed to test any unit that includes the GNSS positioning and to test the receiver’s robustness in case of jamming, spoofing, or meaconing.
Is this all done in the lab or can you put your box in a vehicle?
With this setup, it’s all done in the lab, but we also offer solutions to record the real signals from a UAV or a ground vehicle.
Are the challenges changing? Is the market changing?
Now, a GNSS simulator is no longer sufficient. Testing the receiver’s robustness against various types of attacks, particularly jamming, requires diverse methods. Consequently, there is an emerging need for simulating jamming mitigation antennas, such as Controlled Reception Pattern Antennas (CRPA).
My last newsletter highlighted the products on the National Geodetic Survey (NGS) Alpha Preliminary Products site. The alpha site provides products that individuals can use to better understand the products that will be distributed as part of the new, modernized National Spatial Reference System (NSRS).
This newsletter is going to highlight activities associated with the Transportation Research Board’s ADK70 Standing Committee on Geospatial Data Acquisition Technologies. This committee is concerned with applications of high-accuracy geospatial data acquisition technologies in support of the digital infrastructure for the design and construction of transportation facilities. Members have various backgrounds and expertise and are located in different regions of the United States.
The committee holds two meetings a year, one at the January TRB Annual Meeting held in Washington, D.C., and a summer meeting in different locations each year in late July.
This year, the meeting of the Geospatial Acquisition Technologies in Design and Construction Summer Committee was held on July 29-31, 2024, in Washington, D.C. Topics included new technologies on data collection, modeling and plan delivery. There were updates from organizations such as the National Geodetic Survey, the Federal Highway Administration, the American Association of State Highway and Transportation Officials and various state departments of transportation on technology, standards, specifications and industry needs. See the agenda below.
I first got involved with this committee in 1999, when I worked for NGS. One may ask, why would a geodesist be interested in a committee that focuses on the design and construction of transportation facilities? In my opinion, this is an important committee that addresses geospatial issues that affect all users of geospatial data, not just state Department of Transportation (DOT) surveyors and engineers.
As anyone who has been reading my GPS World Survey Scene newsletters knows, I remind everyone that “geodesy is the foundation for all geospatial products and services.” As previously stated, this committee is concerned with applications of high-accuracy geospatial data acquisition; therefore, surveyors and geodesists must be involved to address issues associated with positioning. Anyone using or acquiring geospatial data should be interested in this committee’s activities.
During AKD70 summer workshop meetings, participants talk with technical experts about the latest advancements in geospatial data acquisition technologies. I would encourage anyone interested in high-accuracy geospatial data acquisition technologies to learn more about this TRB committee, which is currently chaired by Wei Johnson, South Carolina DOT.
Digital delivery geometric consistency concerns
One session at the meeting discussed concerns with digital delivery geometric consistency. We now live in a world where everything is digital. Today, most surveying and mapping instruments collect and generate data in digital format. This paradigm has affected how surveyors, geodesists, and engineers provide their products and services. So, what is the issue with digital delivery geometric consistency?
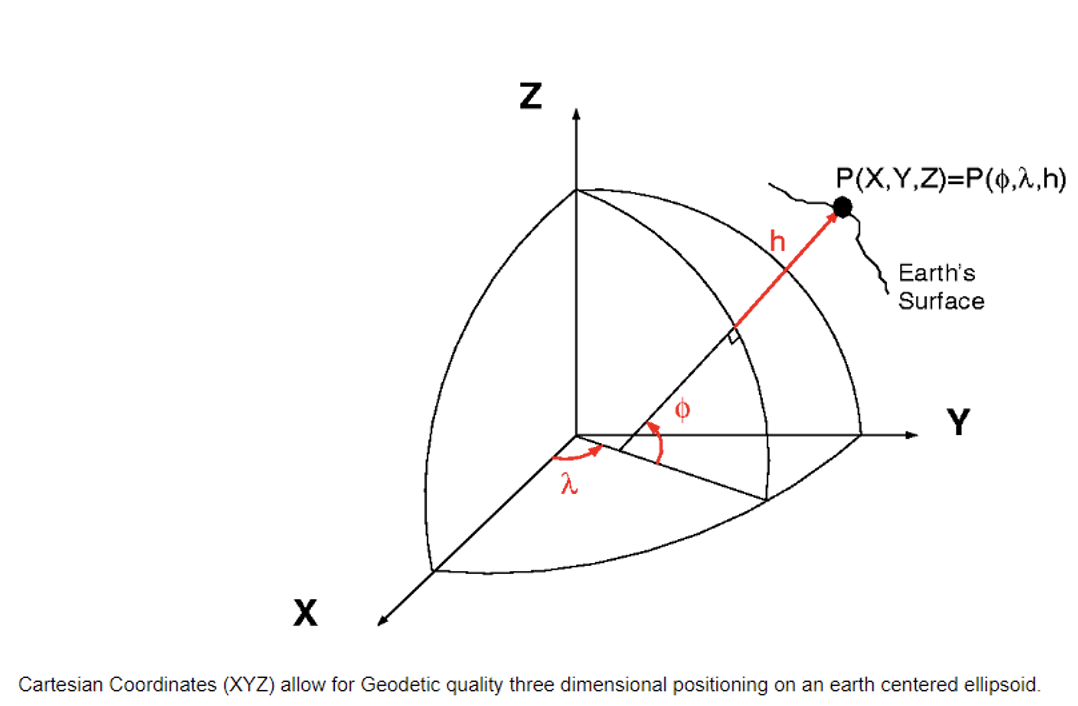
As I previously stated, I am a geodesist, so I think in geodetic coordinates (latitude, longitude, ellipsoid and orthometric height) or cartesian coordinates (X, Y and Z).
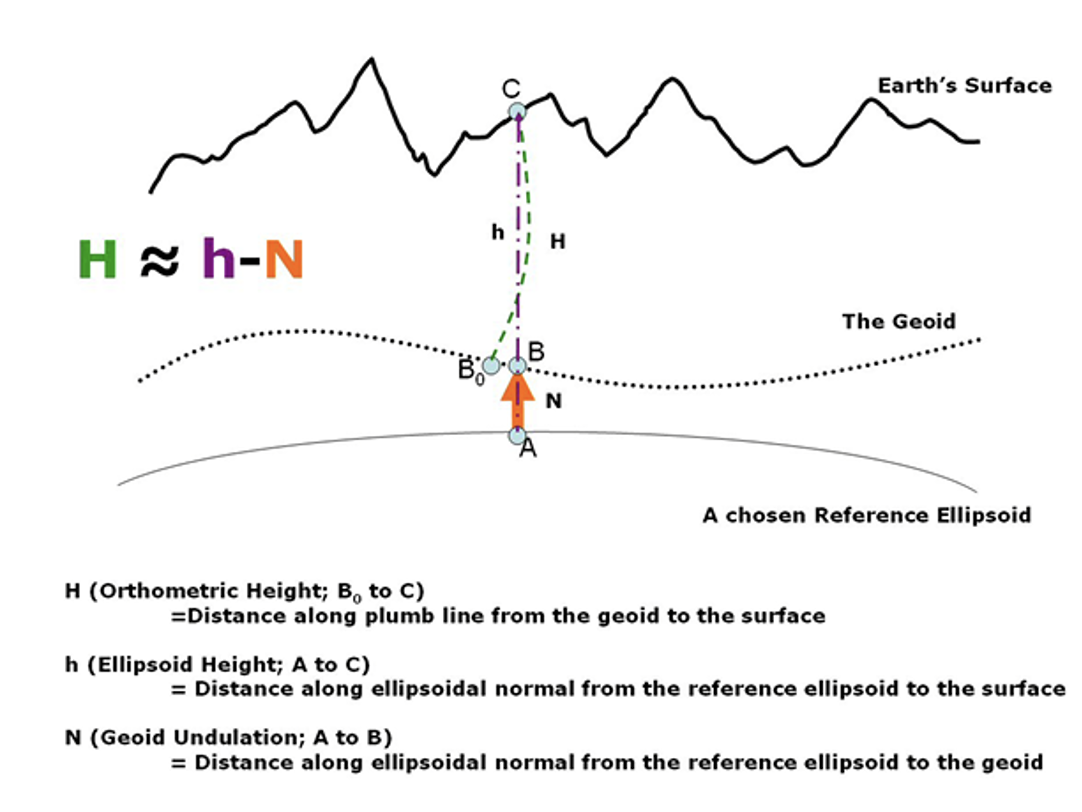
Three-Dimensional Positioning (XYZ). (Photo: NGS)Orthometric, Ellipsoid and Geoid Heights from NOAA Technical Memorandum NOS NGS 59. (Photo: NGS)
Looking at the diagram in the above image, I would like to highlight that the orthometric height is measured from the geoid along a curved line. The curved line is based on an infinite number of geopotential level surfaces that exist between the geoid, which is a geopotential surface, and the mark located on Earth’s surface. This is why gravity plays a part in determining the orthometric height of a mark.
This means that leveling height differences are not the same as ellipsoid height differences. To compute a GNSS-derived orthometric height, a geoid height is subtracted from the GNSS-derived ellipsoid height. This is only an approximation because of how the two heights are measured but, at this moment, it is accurate enough for surveying and mapping applications.
What about computing an ellipsoid height from an orthometric height? The ellipsoid height can be computed using the equation h = H + N (ellipsoid height = orthometric height + geoid height). Once you have an ellipsoid height, you can compute the X, Y, and Z coordinates of the mark. Orthometric heights derived from leveling data are one-dimensional (orthometric height only), whereas GNSS-derived coordinates are three-dimensional (XYZ or latitude, longitude, ellipsoid height). Therefore, to compute a cartesian coordinate (XYZ), from a leveling-derived height users must generate a latitude and longitude of the mark. It is important to use the appropriate geoid height and to record that information in a metadata file.
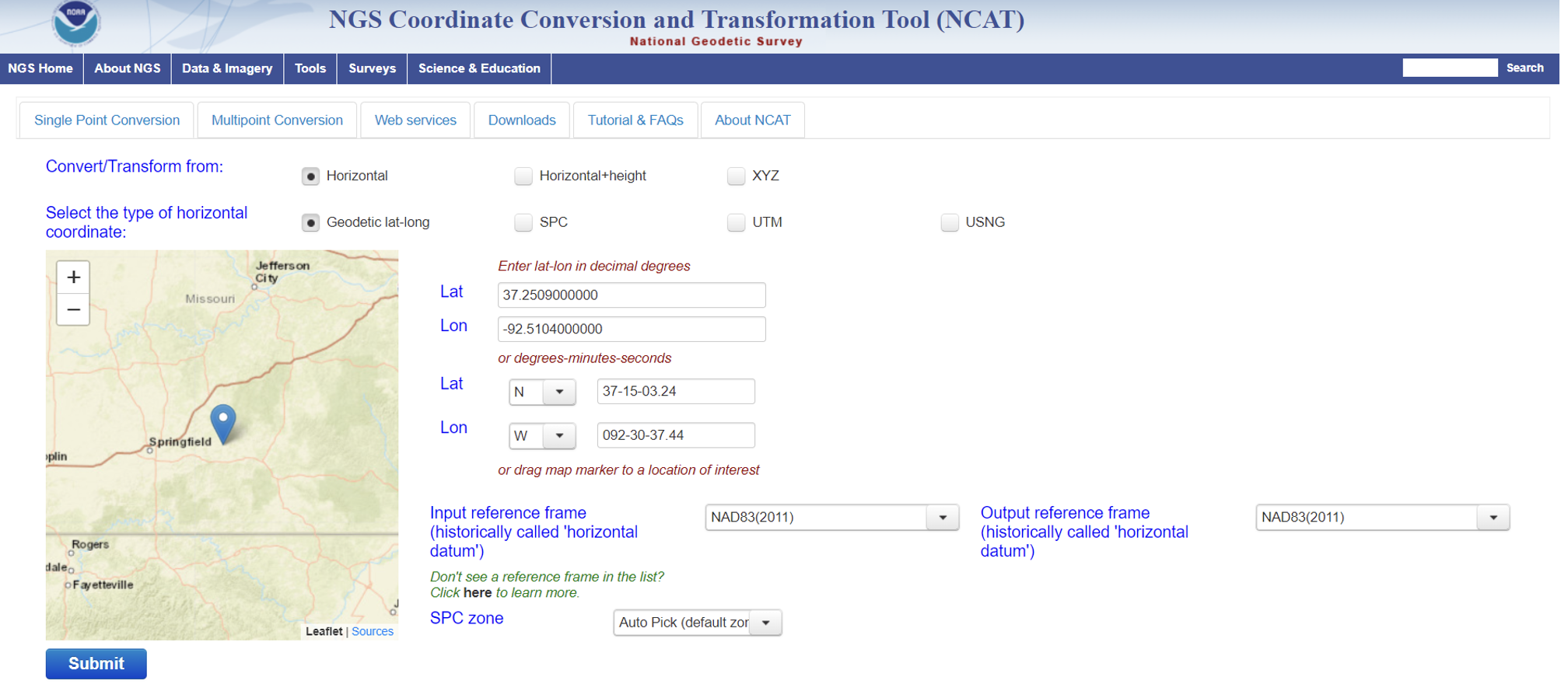
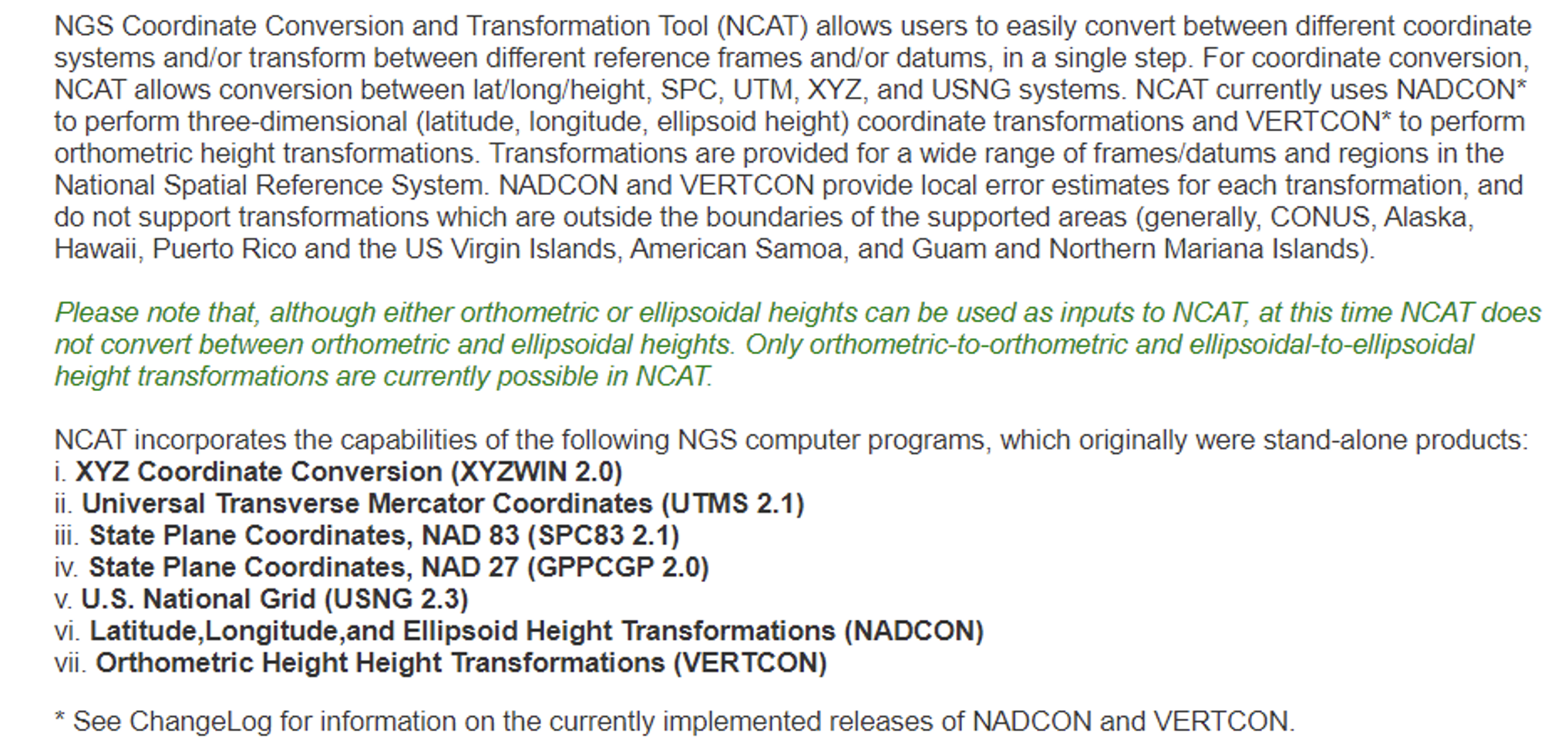
NGS has developed web-based applications to convert coordinates between different coordinate systems and transform between different reference frames and/or datums. See the box titled “NGS NCAT Web Tool.” I described the NCAT web tool in my October 2019 and September 2023GPS World newsletters.
NGS NCAT web tool. (Photo: NGS)Photo: NGS
So, from a geodesist’s point of view, there is no issue with digital delivery geometric consistency if the appropriate tools are correctly used to convert coordinates between different coordinate systems and transform them between different reference frames and/or datums. That said, unique coordinate systems may be used by engineers to create 2D and 3D as-built drawings, such as blueprints and models. This should not be a problem for developing a transformation model if the appropriate information is available.
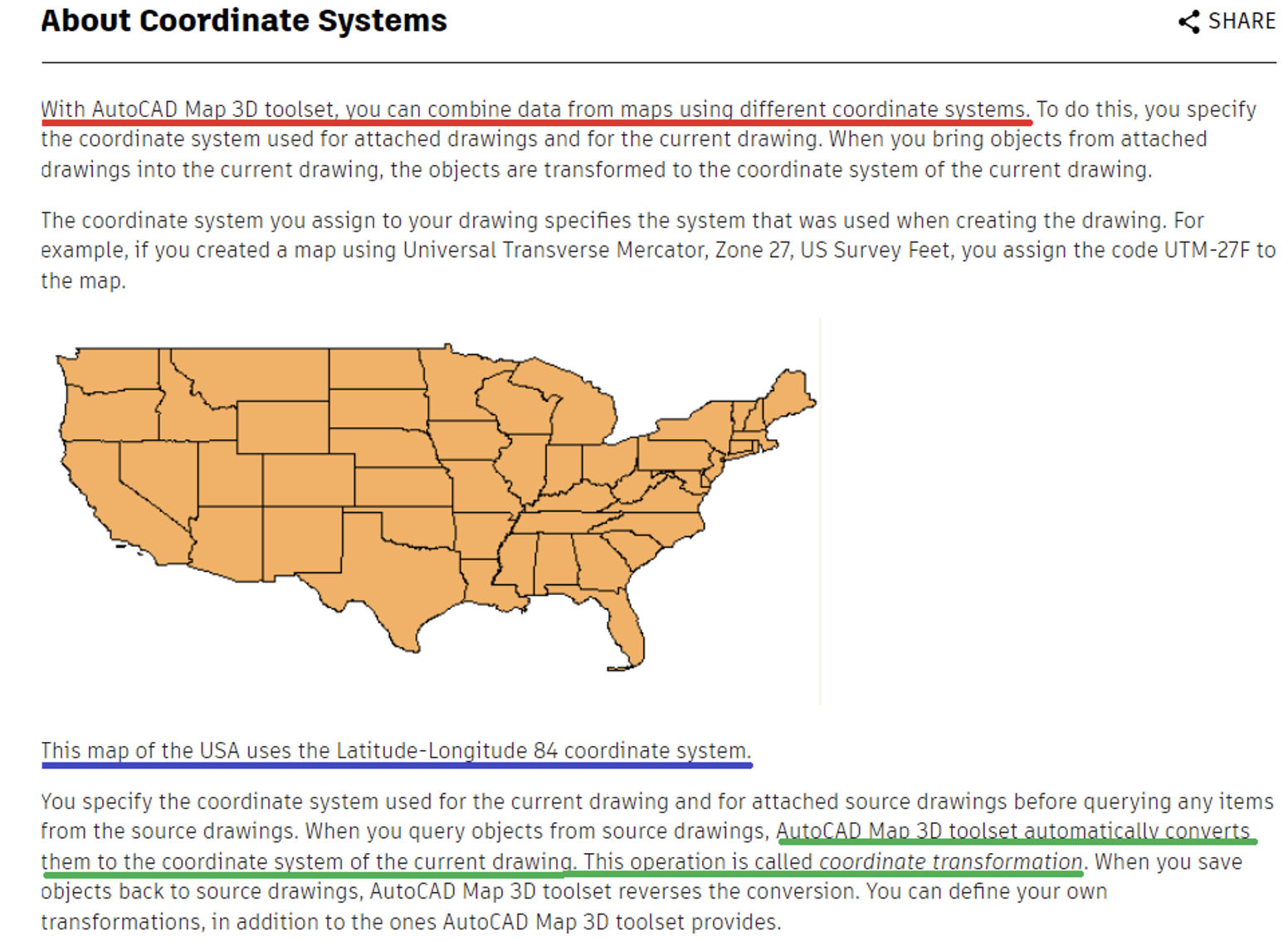
The AutoCAD Map 3D website states that users can combine data from maps using different coordinate systems (see the box titled “Excerpt from AutoCAD Map 3D Site”). The site states that “AutoCAD Map 3D toolset automatically converts them to the coordinate system of the current drawing.” This is an indication that CAD routines are working on handling different coordinate systems.
That said, users should make sure that the conversions and transformations are using the correct formulas and parameters. For example, I would like to know what defines the Latitude-Longitude 84 coordinate system that is highlighted in the box. I am not suggesting that anything is incorrect in the definition of the coordinate system. I am just saying that I do not know what the statement means; I would need more information before I can use the data.
Excerpt from AutoCAD Map 3D 2025 site.
That said, ESRI and Autodesk, two industry leaders, have created a partnership to integrate GIS and Building Information Models (BIM), which seeks to create an integrated and collaborative workflow that connects data sources. ESRI denotes this as ArcGIS GeoBIM.
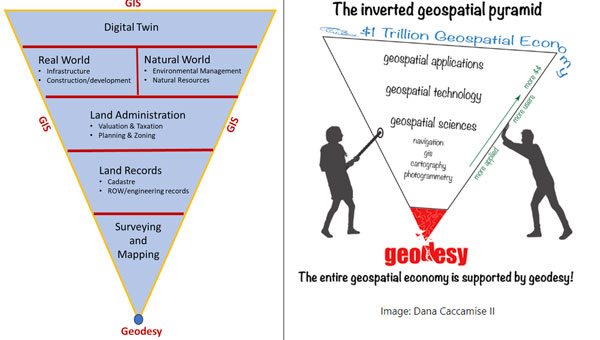
Representatives from ESRI and Autodesk participated in the meeting. During the meeting, Linda Foster, ESRI and President-Elect of the National Society of Professional Surveyors (NSPS), gave a presentation that included a discussion of the ArcGIS GeoBIM web-based tool. Linda highlighted how geodesy and surveying provide the foundation for Digital Twin products. Her presentation included a diagram that I have recreated below.
Notice that geodesy is at the base and digital twin is at the top of the inverted triangle. See the box titled “Geodesy Provides the Foundation for all Geospatial Products and Services.” The diagram is like the one I highlighted in my February 2022 GPS World Newsletter to emphasize the geodesy crisis. Both diagrams emphasize the importance of geodesy and surveying in creating geospatial products and services. It is encouraging to see that ESRI and Autodesk are working together to understand the needs of both communities. This will lead to the development of an improved system.
Image: Dave Zilkoski — based on Linda Foster’s presentation at the TRB AKD70 summer meeting on July 30, 2024.
From a geodesist’s viewpoint, there does not seem to be a problem with digital delivery geometric consistency. Of course, I know that it is not as simple as I am making it. I realize that the “devil is in the details,” which means that something that appears to be simple will identify issues that will have to be dealt with during development and implementation. During the meeting, it was announced that the TRB AKD70 Committee is developing a webinar titled “Resolving ambiguities between 3D virtual models and the real world” to make people aware of the issues.
Proposed Webinar
Proposed title: “Resolving ambiguities between 3D virtual models and the real world” Proposed description: The transportation industry is rapidly moving towards achieving digital product delivery and digital as-built objectives in the Civil Infrastructure sector. They are doing this by adopting a 100% end-to-end digital, asset-centric, interoperable data flow. However, the current methodologies being discussed use outdated concepts that rely on 2D/1D plans and profile/cross-section sheets as part of physical construction reality. These methodologies are not in line with current construction objectives, which require the use of Open BIM and Digital Twin concepts. Therefore, it’s crucial to address the current geospatial and geodesic ambiguity between the real world and BIM (virtual 3D models) to ensure a clear understanding of the proposed solution and its efficient implementation. This is especially important considering the industry’s reliance on Global Navigation Satellite System (GNSS) measurement methodologies. There is an imperative need to resolve this geospatial and geodesic ambiguity by adopting sound geodetic methodologies. The webinar will present the basic tenets of geodetic engineering from three points of view: the Department of Transportation (DOT) perspective, the digital product delivery perspective and the Survey/Geodesy perspective. Proposed purpose: To raise awareness among the DOT community, which is intent on achieving the 100% digital end-to-end asset-centric interoperable flow objectives, of the need to resolve the ambiguities between virtual 3D models and the real world.
I always learn something new at these meetings and continue to build new relationships expanding my professional network. These meetings are open to anyone, so I would encourage everyone to learn more about the TRB ADK70 Standing Committee on Geospatial Data Acquisition Technologies. Please contact Wei Johnson for more information about getting involved with the committee.
FlytBase and Pix4D have entered a strategic partnership, allowing FlytBase users to seamlessly upload their drone-captured data directly to the PIX4Dcloud online platform.
As automated UAV-docked operations become more prevalent, the volume and frequency of data collection have significantly increased. The partnership addresses this by offering users a way to conduct numerous daily missions and schedule them in advance from remote command centers.
Using FlytBase’s Pix4D Flink, users can now directly sync UAV-captured data from FlytBase to PIX4Dcloud, an online platform for aerial mapping, progress tracking and site documentation. PIX4Dcloud processes high-resolution images using photogrammetry algorithms, transforming them into accurate, georeferenced orthomosaics, 3D meshes, point clouds and elevation models. The platform can be used in construction monitoring, mapping and surveying applications.
In addition to the one-click integration, FlytBase offers the latest automation functionalities required for docked UAV operations, combined with flight safety and fleet management capabilities. It allows users to execute consistent UAV data collection operations while seamlessly integrating with beyond visual line of sight (BVLOS) hardware and software solutions, such as parachutes, detect-and-avoid systems, uncrewed traffic management and weather monitoring systems for safe operations.
Adhering to ISO 27001, SOC 2 Type II and GDPR standards, FlytBase ensures data protection through network firewalls and offers flexible deployment options to accommodate enterprise data privacy requirements.
GeoCue has introduced the TrueView GO handheld mapping system, designed for reality capture and detailed 3D mapping. The system can be used for surveying, civil engineering, construction, urban planning and forestry.
The TrueView GO series includes the 16-channel 116S and the 32-channel 132S models and integrates GNSS real-time kinematics (RTK), survey-grade lidar scanning, cameras and visual SLAM technologies. These features allow users to create real-time digital twins in indoor or outdoor environments.
The series offers a comprehensive set of features ideal for handheld mapping. The device provides real-time SLAM capabilities, displaying georeferenced point clouds live on a tablet for instant adjustments and thorough coverage.
It can operate in areas with weakened or denied GNSS signals, making it suitable for indoor and urban surveys. The TrueView GO also enables remote measurement of inaccessible areas by collecting reference points from a distance. Its SLAM technology, when combined with RTK, allows for loop-free path planning, eliminating the need for traditional loop closure and overlap and reducing project completion time and distance when GNSS coverage is available.
The handheld mapping scanner features LP360 LAND. This geospatial software is specifically designed for processing handheld lidar and imagery data. LP360 LAND seeks to enhance data accuracy using robust QA/QC tools, 3D point cloud processing and visualization and capabilities such as SLAM, denoising, colorization, registration and classification.
LP360 LAND can handle diverse applications, including data classification, tree segmentation, volume calculation and export to BIM using both desktop and cloud environments.