It’s truly mind-boggling when I think of how early we are in the technology adoption curve — not just for geospatial technology, but technology in general. On the one hand, it’s scary to think about how much technology might penetrate and be further integrated into our lives, on the verge of threatening our privacy if we let it. On the other hand, it’s frustrating to think about how crashes, crimes and catastrophes can be avoided or minimized if today’s technology was deployed.
Crashes. There is no reason that something like the Asiana Airlines crash at the San Francisco International Airport or the Southwest Airlines Boeing 737 landing at the wrong airport in Branson, Missouri, earlier this month should have ever happened. Technology exists today that can prevent these sorts of incidents and tragedies caused by human error, and prevent some that are not caused by human error.
Simply put, if my automotive GPS receiver can steer me to the correct McDonald’s (one of many) within a city, there’s no reason a GPS receiver (with a current airport database) can’t guide a pilot to the correct airport. If I can load a CAD model into a bulldozer machine-control system and have it grade the surface material to within a few centimeters, a similar GPS system can certainly assist in landing an airliner at the San Francisco airport without hitting the sea wall.
Thinking on a broader scale, there is no reason that the vast majority of vehicle crashes should occur. That’s right, something that occurs every day and in every city in the world, causing billions of dollars of economic loss each year, should never happen. At a minimum, high-speed laser rangefinders on each side of a vehicle could monitor the distance from other vehicles/obstacles and automatically brake or warn the vehicle operator of an impending collision if preventive action is not taken. The advancement of Intelligent Transportation Systems (ITS) will change our daily lives, and that technology revolution is just beginning.
Crimes. Stolen vehicles should become nearly extinct. Just like nearly every rental car today has a GPS tracking system in it to track its location if stolen, there’s no reason that every personal and commercial vehicle should not have the same technology. In fact, every valuable (as deemed by you) possession such as your bicycle, your pets, your lawnmower, and even your kids, can be outfitted with some sort of inexpensive location technology.
How about monitoring convicted felons? Imagine the massive cost savings if prison populations could be significantly reduced because convicted felons could be “electronically incarcerated”?
Catastrophes. We can’t control Mother Nature’s power to wreak havoc with her weather phenomena, but people can be forewarned and bettered prepared to take timely action. Television has the Emergency Alert System, which is designed to enable the president of the United States to speak on television to the American population within 10 minutes. However, with services such as Netflix, Chromecast, and DVR recording devices, television viewing habits are changing. The mobile device is the new television. A tremendous amount of work still needs to be done to catch up with the rapid adoption of mobile devices.
SARSAT U.S. Rescues – 2013. Source: NOAA
The U.S. National Oceanic and Atmospheric Administration (NOAA) reported that it helped save 253 lives in 2013 using sensors on satellites to forewarn people of severe weather. According to NOAA, its satellites detected distress signals from emergency beacons carried by downed pilots, shipwrecked boaters and stranded hikers, and relayed information about their locations to first responders on the ground. It’s a powerful statement of what the combination of sensors and communications can accomplish.
“Each life we save underscores the undeniable value of NOAA satellites,” said Mary Kicza, assistant administrator for NOAA’s Satellite and Information Service.
The Common Denominator
The common technology denominator for eliminating or mitigating the effects of crashes, crimes, and catastrophes is sensors and communications. Those two technologies are the driving forces behind the next industrial revolution, and it’s going to be huge, perhaps a bigger economic impact on the world than the first industrial revolution, according to an article in the San Jose Mercury News.
The Mercury News article quotes a study published by General Electric (GE) concluding that sensors and communications (referred to as the Internet of Things in the article) could “add as much as $15 trillion to the global GDP, which it noted is roughly the size of today’s U.S. economy.” That’s a staggering number.
After I read the Mercury News article, I thought about many of the geospatial consulting projects I’m working on. The biggest challenges my clients face are related to one of three technologies: lack of inexpensive sensors, lack of communications, and lack of software to deal with the increasing volumes of data (for example, Big Data).
I’ve written about the value of sensors (GNSS, RFID, analog, etc.) quite a bit. I believe they will be the foundation of the next industrial revolution because they will provide a high level of granularity — in other words, very detailed data from which better decisions can be made. A great example is the Snapshot program that insurance company Progressive uses to dial in automobile insurance rates. Part of the Snapshot program is a device that you plug into your car’s OBD (On-Board Diagnostic) port. It monitors your driving habits for 30 days. It records how often and how hard you apply your brakes, how many miles you drive and times during the day that you drive. After 30 days, Progressive statisticians evaluate your driving habits and assign an insurance premium. If you’re a safe driver (by their definition), you’ll likely save money on your insurance premium.
According to Progressive, drivers respond to real-time feedback.
The industry publication Insurance & Technology reports that the newer version of Snapshot provides real-time feedback such as a “beep” when driver brakes too hard. Progressive General Manager Dave Pratt claims, “You do see the driving score change — we have data that says people who get that kind of feedback have fewer accidents. But I see that as real-time feedback 1.0. You want to do more, but you do not want to distract people while they’re driving either. There’s a balance to be struck.”
Progressive’s Snapshot program is a great example of using an inexpensive sensor to collect highly granular data in order to make better decisions. Think about how having access to granular data like this in your job may enhance your decision-making. If a farmer precisely knew the characteristics of the soil in all of his fields and within each field, wouldn’t he make better decisions about soil treatment and planting? If a municipal engineer precisely knew the condition of a water distribution system, wouldn’t she be able to make better decisions about maintenance and upgrade requirements?
Inexpensive sensors are only one piece of the puzzle. Without a method of real-time communication and software to process it, the value of the data suffers. Therefore, inexpensive sensors will drive the demand for both communications and data processing software.
Lastly, I’ll leave you with an image of a slide presented by Dr. James Canton, CEO at the Institute for Global Futures. The slide is part of a presentation of his entitled “Global Tech Trends 2014”. It is a concise illustration of the confluence of sensors, communications, and data.
The departing Deputy Secretary of Transportation, John Porcari, wrote a letter in the closing days of 2013 opposing the U.S. Air Force’s announced plans to begin broadcasting Civil Navigation (CNAV) message-populated L2C and L5 signals as early as April 2014. Military personnel are incensed over what they see as Porcari’s impugning, when not ignoring, the Air Force 35-year track record of broadcasting the gold standard of global navigation satellite signals — something in which Transportation has zero experience.
Porcari alludes in his December 27 letter to “non-standard engineering tools” and “non-standard operations” that he believes would come into play for early CNAV broadcast. “These have the potential to inject human error, which may result in unacceptable GPS constellation operation.”
What Porcari means by “non-standard” he does not specify, although he confesses to unease as “the ability to monitor these signals, [without which] the system will not know if the L2C and LS signals are within specification. Given these risks, DOT is concerned that the CNAV messages could provide hazardously misleading information, impacting GPS safety-of-life, protection of property, and economic security applications.” The full text of the Porcari letter is available here.
In addition to questioning Air Force 2 SOPS ability to broadcast an accurate, compliant signal containing CNAV, the letter appears to ignore — or be ignorant of — the 17 official U.S. government/military monitoring sites for GPS distributed around the world, not to mention thousands of other monitoring sites run by government agencies such as the Jet Propulsion Laboratory, the National Aeronautics and Space Administration, and the National Geospatial-Intelligence Agency, and by many universities such as Stanford, Ohio State, Cal Tech, Massachusetts Institute of Technology, and many other international institutions around the world. Many of these sites collaborate under the rubric of the International GNSS Service.
Finally, two private corporations monitor and correct all GPS signals both from space and on the ground: John Deere and Trimble Navigation. Both companies run commercial, automated GPS signal monitoring systems that that report any glitch, change, power fluctuation, or anomaly in the navigation message for all GPS signals with an average two-second notification time.
“This letter is so much BS,” fumed one source who wished to remain anonymous, “coming from an agency that is in arrears in its GPS payments to the tune of more than $70 million and has no clue how to represent the global GPS user. GPS is a ubiquitous system, not just a tool for the DOT and the Federal Aviation Administration. GPS needs to implement these signals for all users and as a modernization program that was promised to be in place years ago.”
The implementation changes and first live tests of BeiDou and Galileo on Teseo-3 GNSS chips developed in 2013 are covered, bringing it to a four-constellation machine. By 2020, we expect to have four global constellations all on the same band, giving us more than 100 satellites — under clear sky, as many as 30 or 40 simultaneously.
By Philip G. Mattos and Fabio Pisoni
Multi-constellation GNSS first became widely available in 2010/2011, but only as two constellations, GPS+GLONASS. Although receivers at that time may have supported Galileo, there were no usable satellites. BeiDou was a name only, as without a spec (an interface control document, or ICD), no receivers could be built. However, the hardware development time of receivers had been effectively shortened: the Galileo ICD had been available for years, BeiDou codes had been reverse-engineered by Grace Gao and colleagues at Stanford, and at the end of 2011 they were confirmed by the so-called test ICD, which allowed signal testing without yet releasing message characteristics or content.
The last weeks of 2012 saw two great leaps forward for GNSS. Galileo IOV3 and 4 started transmitting at the beginning of December, bringing the constellation to four and making positioning possible for about two hours a day. At the end of December, the Chinese issued the BeiDou ICD, allowing the final steps of message decode and ephemeris calculation to be added to systems that had been tracking BeiDou for many months, and thus supporting positioning. The Teseo-2 receiver from STMicroelectronics has been available for some years, so apart from software development, it was just waiting for Galileo satellites; however, for BeiDou it needed hardware support in the form of an additional RF front end. Additionally, while it could support all four constellations, it could not support BeiDou and GPS/Galileo at the same time, as without the BeiDou ICD the spreading codes had to be software-generated and used from a memory-based code generator, thus blocking the GPS/Galileo part of the machine.
The Teseo-3 receiver appeared late in 2013, returning to the optimum single-chip form factor: RF integrated with digital silicon and flash memory in the same package, enabling simultaneous use of BeiDou and GPS/Galileo signals. Multi-constellation in 2012 was GPS+GLONASS, which brought huge benefits in urban canyons with up to 20 visible satellites in an open sky. Now, for two hours a day in Europe while the Galileo IOVs are visible, we can run three constellations, and in the China region, GPS/BeiDou/Galileo is the preferred choice.
This article covers the first tracking of four Galileo satellites on December 4, 2012, first positioning with Galileo, and first positioning with BeiDou in January 2013. It will cover static and road tests of each constellation individually and together as a single positioning solution. Road tests in the United States/Europe will combine GPS/GLONASS/Galileo, while tests in the China region will combine GPS/Galileo/BeiDou. Results will be discussed from a technical point of view, while the market future of multi-constellation hardware will also be considered.
In the 2010–2020 timeframe, GLONASS and BeiDou (1602 MHz FDMA and 1561 MHz respectively) cost extra silicon in both RF and digital hardware, and cause marginal extra jamming vulnerability due to the 50 MHz bandwidth of the front end. The extra silicon also causes extra power consumption.
After 2020, GLONASS is expected to have the L1OC signal operational, CDMA on the GPS/Galileo frequency, and BeiDou is expected both to have expanded worldwide, and also to have the B3 signal fully operational, again on 1575 MHz. At that point we will have four global constellations all on the same band, giving us more than 100 satellites. With a clear sky, the user might expect to see more than 30, sometimes 40, satellites simultaneously.
Besides the performance benefits in terms of urban canyon availability and accuracy, this allows the receiver to be greatly simplified. While code generators will require great flexibility to generate any of the code families at will, the actual signal path will be greatly simplified: just one path in both RF (analog) and baseband (digital) processing, including all the notch filters, derotation, and so on. And this will greatly reduce the power consumption.
Will the market want to take the benefit in power consumption and silicon area, or will it prefer to reuse those resources by becoming dual-frequency, adding also the lower-L-band signals, initially L5/E5, but possibly also L2/L3/L6 ? The current view is that the consumer receiver will go no further than L5/E5, but that the hooks will be built-in to allow the same silicon to be used in professional receivers also, or in L2C implementations to take advantage of the earlier availability of a full constellation of GPS-L2C rather than GPS-L5.
This article presents both technical results of field trials of the quad-constellation receiver, and also the forward looking view of how receivers will grow through multi-frequency and shrink through the growing signal commonalities over this decade.
History
Galileo was put into the ST GPS/GNSS receiver hardware from 2006 to 2008, with a new RF and an FPGA-based baseband under the EU-funded GR-PosTer project. While a production baseband (Cartesio-plus) followed in high volume from 2009, in real life it was still plain GPS due to the absence of Galileo satellites.
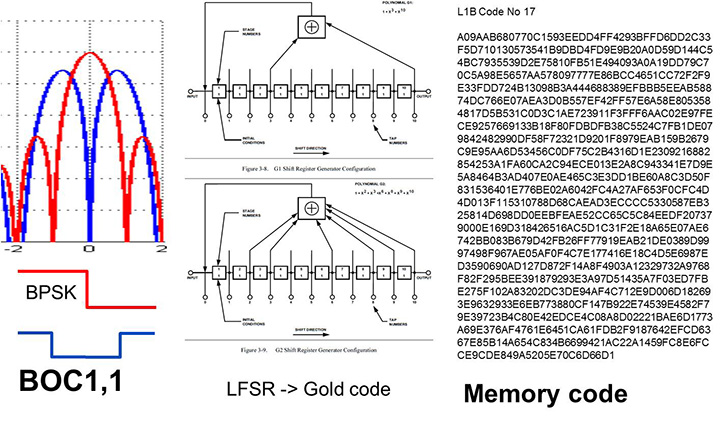
The changed characteristics in Galileo that drove hardware upgrades are shown in Figure 1. The binary offset carrier BOC(1,1) modulation stretches the bandwidth, affecting the RF, while both the BOC and the memory codes affect the baseband silicon in the code-generator area.
Figure 1. Changes for Galileo.
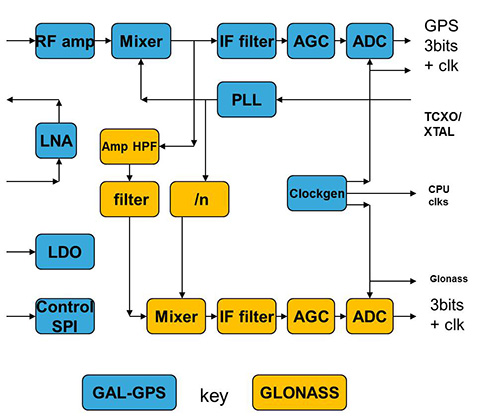
Next was the return to strength of the GLONASS constellation, meaning receivers were actually needed before Galileo. However the different center frequency (1602 MHz), and the multi-channel nature of the FDMA meant more major changes to the hardware. As shown in Figure 2 in orange, a second mixer was added, with second IF path and A/D converter.
Figure 2. Teseo-2 RF hardware changes for GLONASS.Figure 3. Teseo-2 and Teseo-3 baseband changes for GLONASS.
The baseband changes added a second pre-processing chain and configured all the acquisition channels and tracking channels to flexibly select either input chain. Less visible, the code-generators were modified to support 511 chip codes and 511kchips/sec rates.
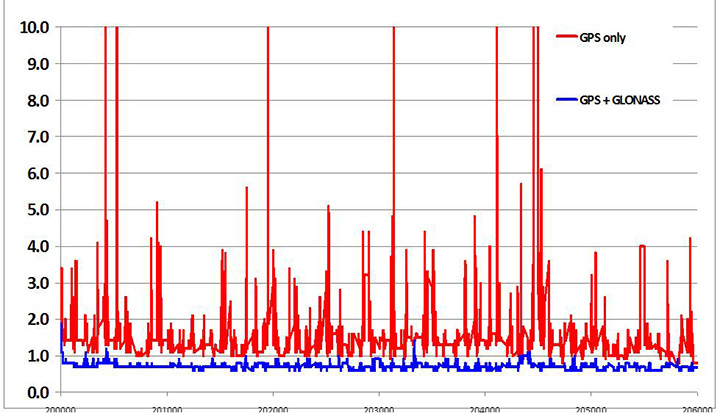
Teseo-2 appeared with GPS/GLONASS support in 2010, and demonstrated the benefit of GNSS in urban canyons, as shown by the dilution of precision (DOP) plot for central London in Figure 4. The GPS-only receiver (in red) has frequent DOP excursions beyond limits, resulting either in bad accuracy or even interrupted fix availability. In contrast, the GNSS version (in blue) has a DOP generally below 1, with a single maximum of 1.4, and thus 100 percent availability. Tracking 16 satellites, even if many are via non-line-of-sight (NLOS) reflected paths, allows sophisticated elimination of distorted measurements but still continuous, and hence accurate, positioning.
Figure 4. DOP/accuracy benefits of GNSS.
BeiDou
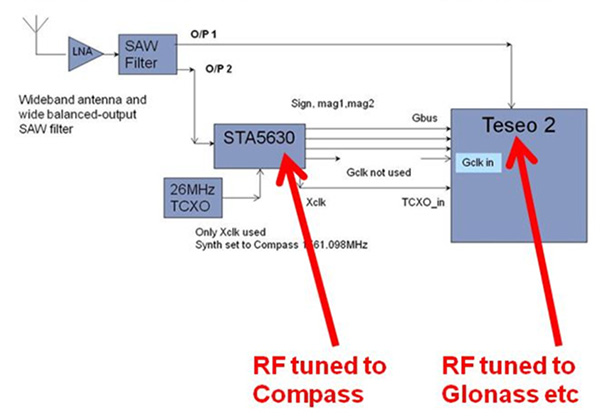
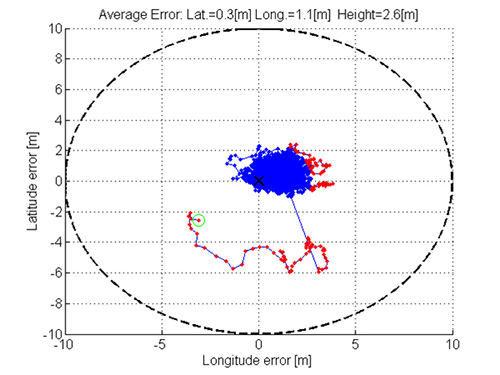
Like Galileo, BeiDou is a story of chapters. Chapter 1 was no ICD, and running on a demo dual-RF architecture as per the schematic shown in Figure 5. Chapter 2 was the same hardware with the test ICD, so all satellites, but still no positioning. Chapter 3 was the full ICD giving positioning in January 2013 (Figure 6), then running on the real Teseo-3 silicon in September 2013, shown in Figure 7.
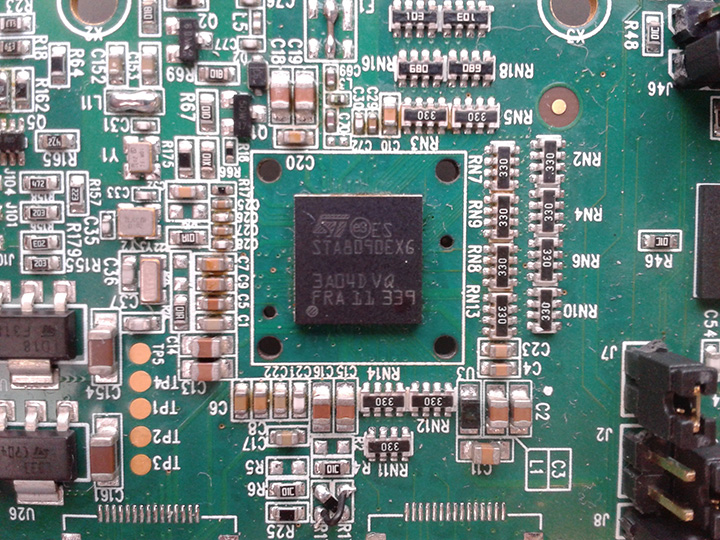
Figure 5. Demo Teseo-2 dual RF implementation of BeiDou.Figure 6. Beidou positioning results.Figure 7. Teseo 3 development board.
The Teseo-3 has an on-chip RF section capable of GPS, Galileo, GLONASS and BeiDou, so no external RF is needed.
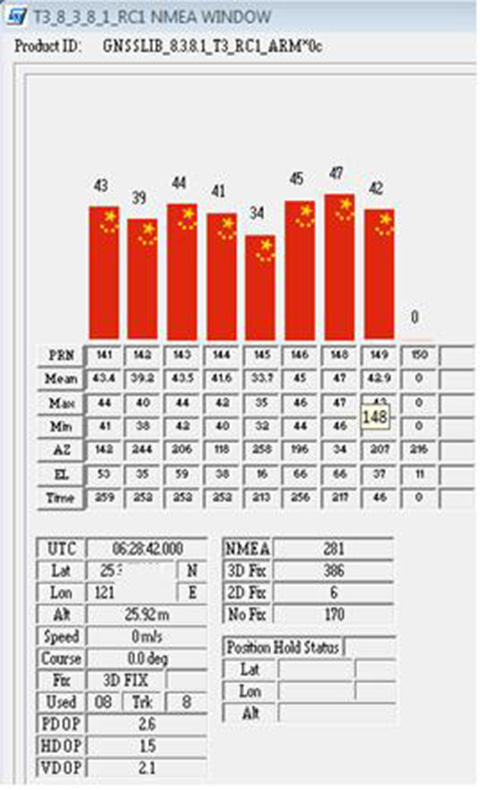
The clear green space around the Teseo-3 chip in the photo and the four mounting holes are for the bolt-down socket used to hold chips during testing, while the chip shown is soldered directly to the board. Figure 8A shows the development board tracking eight BeiDou satellites visible from Taiwan.
However, the silicon is not designed to be single-constellation; it is designed to use all the satellites in the sky. Figure 8b shows another test using GPS and BeiDou satellites simultaneously.
Figure 8A. Beidou.Figure 8b. GPS+Beidou.
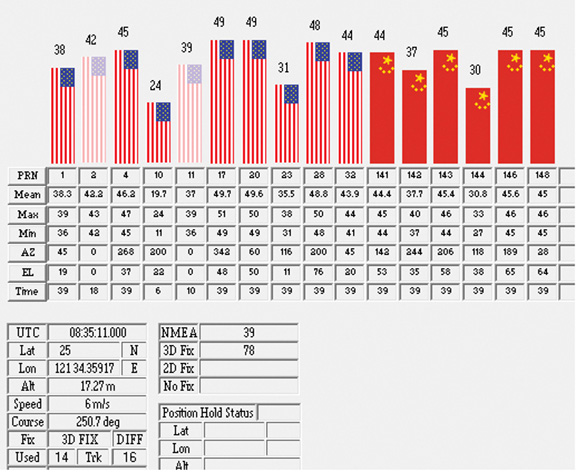
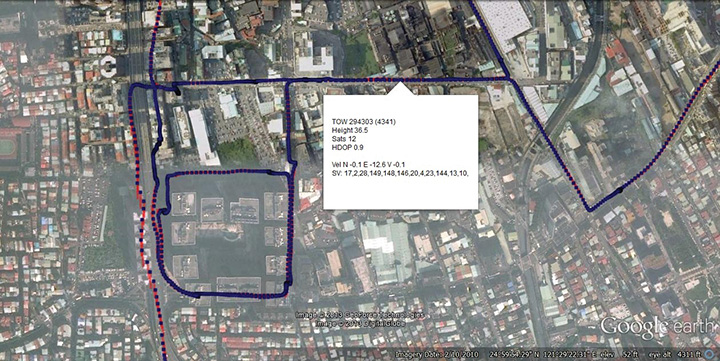
A mobile demo on the Teseo-3 model is shown running GPS plus BeiDou in Figure 9, a road test in Taipei. Satellites (SV) up to 32 are GPS, those over 140 are BeiDou, in the status window shown: total 13 satellites in a high-rise city area, though many are non-LOS.
Figure 9. GPS + Beidou roadtrack in Taipei.
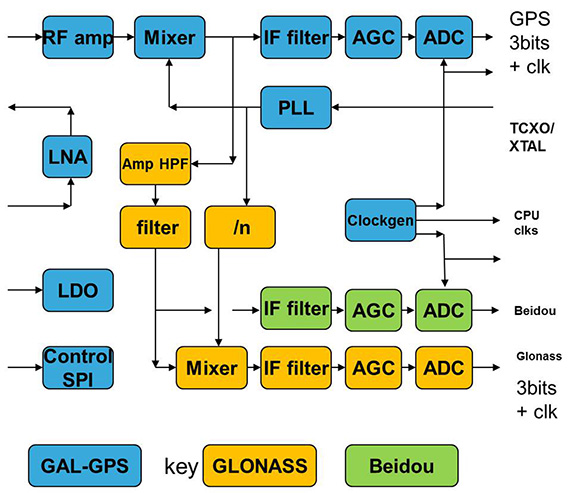
Extending the hardware to add BeiDou, which is on 1561 MHz and thus a third center frequency, meant adding another path through the IF stages of the on-chip radio. After the first mixer, GPS is at 4 MHz, and GLONASS at about 30 MHz, but BeiDou is at minus 10 MHz. While the IF strip in general is real, rather than complex (IQ), the output of the mixer and input to the first filter stage is complex, and thus can discriminate between positive frequencies (from the upper sideband) and negative ones (from the lower sideband), and this is normally used to give good image rejection. In the case of BeiDou, the filter input is modified to take the lower sideband, that is, negative frequencies, and a second mixer is not required; the IF filter is tuned to 10 MHz. The new blocks for BeiDou are shown in green in Figure 10. The baseband has no new blocks, but the code generator has been modified to generate the BeiDou codes (and, in fact, made flexible to generate many other code types and lengths). Two forms of Teseo-3 baseband are envisaged, the first being for low-cost, low-current continues to have two input paths, so must choose between GLONASS and BeiDou as required. A future high-end model may have an extra input processing path to allow use of BeiDou and GLONASS simultaneously.
Figure 10. Teseo-3 RF changes for Beidou shown in green.
Galileo Again
Maintaining the chronological sequence, Galileo gets a second chapter in three steps. In December 2012, it was possible for the first time to track four IOV satellites simultaneously, though not to position due to the absence of valid orbit data. In March 2012, it was possible for the first time to demonstrate live positioning, and this was done using Teseo-2 simultaneously by ESA at ESTEC and STMicro in Naples and Milan, our software development centres.
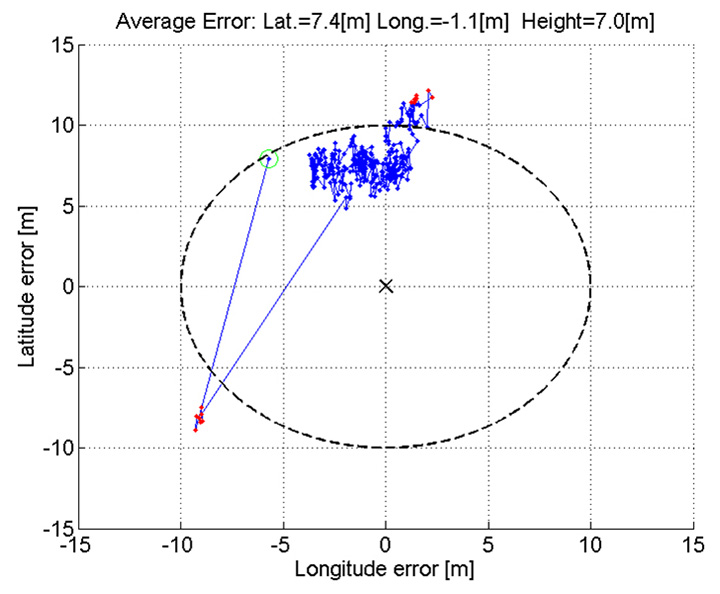
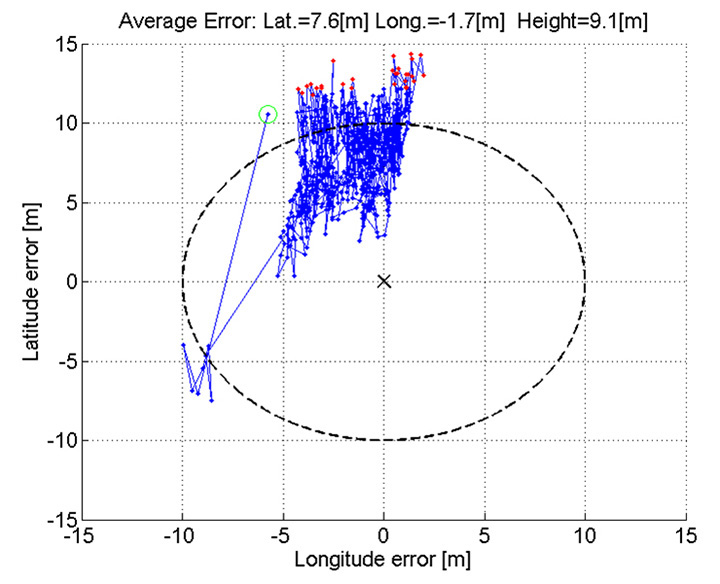
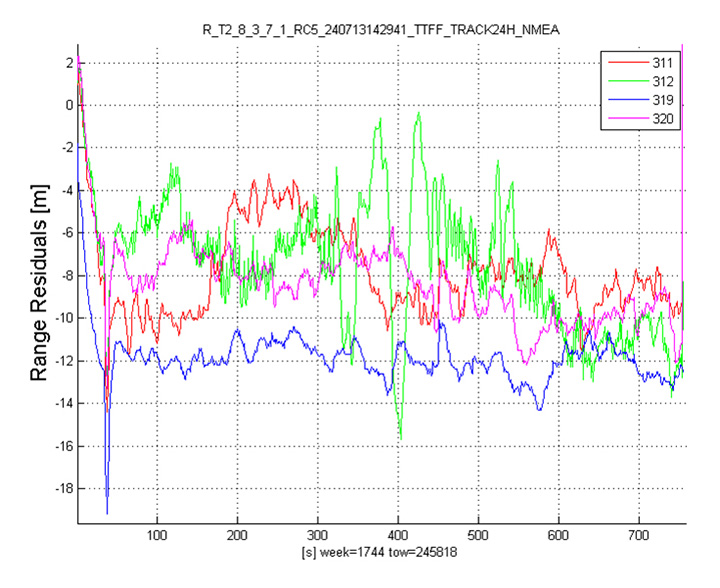
The demos were repeated in public for the press on July 24, 2013, at Fucino, Italy’s satellite earth station, with ESA/EC using the test user receiver (TUR) from Septentrio, and ST running simultaneous tests at its Italian labs. Figure 11 and Figure 12 show the position results for the data and pilot channels respectively, with independent LMS fixes. In real life, the fixes would be from a Kalman filter, and would be from a combined E1-B/E1-C channel, to take advantage of the better tracking on the pilot.
Good accuracy is not expected from Galileo at this stage. The four satellites, while orbited to give good common visibility, do not also give a good DOP; the full set of ground monitoring stations is not yet implemented and cannot be well calibrated with such a small constellation. Finally, the ionospheric correction data is not yet available. Despite these problems, the residuals on the solutions, against a known fixed position for the rooftop antenna, are very respectable, shown in Figure 13.
Figure 13. Galileo residuals, L1-B.
The common mode value is unimportant, representing only an offset in the receiver clock, and 10 meters is about 30 nanoseconds. The accuracy indicator is the spread between satellites, which is very respectable for a code-only receiver without full iono correction, especially around 640 on the TOW scale, where it is less than 2 meters. The rapid and major variation on the green data around t=400 is considered to be multipath, as the roof antenna is not ideally positioned with respect to other machinery and equipment also installed on the roof.
QZSS and GPS-III/L1C
Teseo-2 has supported the legacy (C/A code) signal on QZSS for some time, but Teseo-3 has been upgraded to handle the GPS-III/L1-C signal, waiting for modernized GPS. This signal is already available on the QZSS satellite, allowing tests with real signals. Significant changes were required in the baseband hardware, as the spreading code is a Weill code, whose generation complexity is such that it is generated once when the satellite is selected, then replayed real time from memory. Additionally it is long, in two domains. It is 10230 chips — that is, long to store but also long in time, with a 10-millisecond epoch. On Teseo-3, the legacy C/A code is used to determine code-phase and frequency before handing over to the Weill code for tracking.
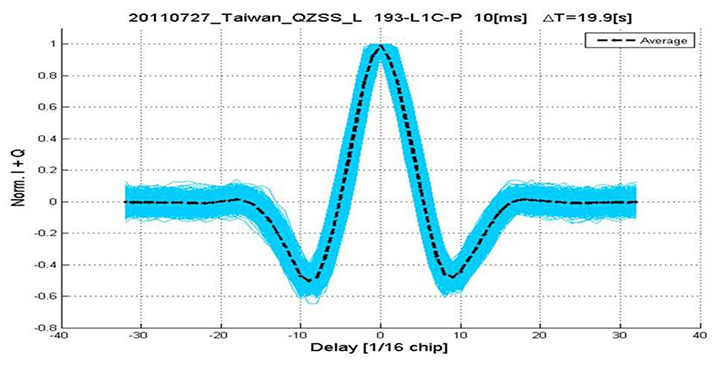
Using a long-range crystal ball and looking far into the future, a model of the future Teseo-4 DSP hardware is available, with 64 correlation taps per satellite. Running this on the captured QZSS L1-C signal gives the correlation response shown in Figure 14. Having multiple taps removes all ambiguity from the BOC signal, simultaneously removing data transitions, which can alternatively be pre-stripped using the known pilot secondary code (which on GPS III is 5 dB stronger than the data signal). The resultant plot represents 2,000 epochs, each of 10 milliseconds, plotted in blue, with integrated result for the full 20 seconds shown in the black dashed line. Assuming vehicle dynamics is taken out using carrier Doppler, this allows extremely precise measurement of the code phase, or analysis of any multipath in order to remove it. This RF data was captured on a benign site with a static antenna, so it shows little distortion.
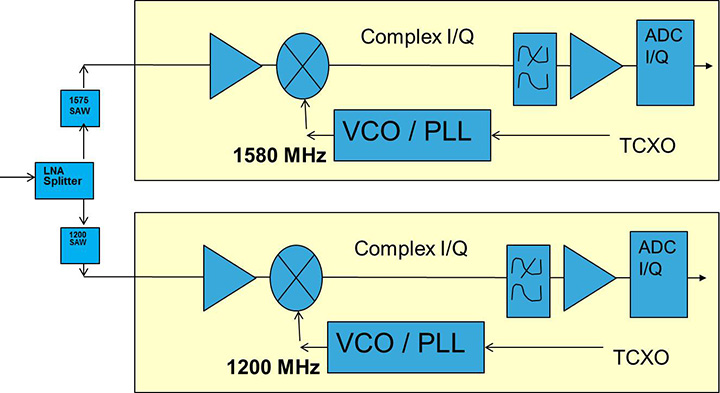
Figure 14. L1-C tracking on QZSS satellite.Figure 15. Dual RF implementation of dual-band front end.
The Future
Having already built in extreme flexibility to the code generators to support all known signals and generalized likely future ones, the main step for the future is to support multiple frequencies, starting with adding L5 and/or L2, but as before, ensuring that enough flexibility is built in to allow any rational user/customer choice. It is not viable for us to make silicon for low-volume combinations, nor to divide the overall market over different chips. Thus our mainstream chip must also support the lower volume options.
We cannot, however, impose silicon area or power consumption penalties on the high-volume customer, or he will not buy our product.
Thus, our solution to multi-frequency is to make an RF that can support either band switchably, with the high band integrated on the volume single-chip GNSS. Customers who also need the low band can then add a second RF of identical design externally, connected to the expansion port on the baseband, which has always existed for diagnostic purposes, and was how BeiDou was demonstrated on T2. By being an RF of identical design to the internal one, it incurs no extra design effort, and would probably be produced anyway as a test chip during the development of the integrated single-chip version. Without this approach, the low volume of sales of a dual-band radio, or a low-band radio, would never repay its development costs.
Conclusions
All four constellations have been demonstrated with live satellite signals on Teseo-2, a high-volume production chip for several years, and on Teseo-3 including use in combinations as a single multi-constellation positioning solution. With the advent of Teseo-3, with optimized BeiDou processing and hardware support for GPS-3/L1C, a long-term single-chip solution is offered.
For the future, dual-frequency solutions are in the pipeline, allowing full advantage of carrier phase, and research into moving precise point positioning and real-time kinematic into the automotive market for fields such as advanced driver-assistance systems.
Acknowledgments
Teseo III design and development is supported by the European Commission HIMALAYA FP-7 project.
This article is based on a technical paper first presented at ION-GNSS+ 2013 in Nashville, Tennessee.
ST GPS products, chipsets and software, baseband and RF are developed by a distributed team in: Bristol, UK (system R&D, software R&D; Milan, Italy (Silicon implementation, algorithm modelling and verification); Naples, Italy (software implementation and validation); Catania, Sicily, Italy (Galileo software, RF design and production); Noida, India (verification and FPGA). The contribution of all these teams is gratefully acknowledged.
Philip G. Mattos received an external Ph.D. on his GPS work from Bristol University. Since 1989 he has worked exclusively on GNSS implementations, RF, baseband and applications. He is consulting on the next-generation GNSS chips, including one-chip GPS (RF+digital), and high-sensitivity GPS and Galileo for indoor applications, and combined GPS/Galileo/GLONASS chipsets. In 2008-2009, he re-implemented LORAN on the GPS CPU, and in 2009-2010 led the GLONASS implementation team. He is leading the team on L1C and BeiDou implementation, and the creation of totally generic hardware that can handle even future unknown systems.
Fabio Pisoni has been with the GNSS System Team at STMicroelectronics since 2009. He received a master’s degree in electronics from Politecnico di Milano, Italy, in 1994. He was previously with the GNSS DSP and System Team in Nemerix SA and has earlier working experience in communications (multi-carrier receivers).
The global market for location-based applications is poised for rapid growth, as the mass adoption of global positioning system (GPS)-enabled smartphones is encouraging developers to introduce numerous advanced applications, says market research agency Frost & Sullivan.
New analysis from Frost & Sullivan finds that indoor connectivity, augmented reality, big data and wearable devices are the key technology trends likely to fuel the uptake of location-based applications. Location-based technology and data can then be combined to facilitate the development of smart spaces in every city and community.
“Location-based application developers have so far focused on the development of outdoor applications due to the adoption of GPS positioning in smartphones,” noted Frost & Sullivan Information & Communication Technologies Research Analyst Shuba Ramkumar. “However, as individuals spend more time indoors, there is a need to roll out indoor location-based applications that capitalise on various functionalities such as mapping, navigation and geo-fencing.”
According to the announcement, augmented reality technology could also be used to make location-based applications more interactive. Further, the widening ecosystem of wearable devices such as Google Glass and Samsung Galaxy Gear infuses technology into the daily lives of individuals, widening the scope of context-aware applications. However there are several challenges restricting the growth of the location-based applications market. The lack of standardisation in indoor positioning technologies such as Wi-Fi, sensors and Bluetooth is complicating the development of indoor applications. Location-based application providers will need to wait until wearable device manufacturers address the issues of limited battery life and dependence on smartphones for outdoor connectivity.
Frsot & Sullivan reports that market participants also find it difficult to monetise applications due to the absence of a clear business model. In this scenario, application developers should seek to identify new sources of revenue. They can expedite market expansion by establishing contracts with indoor venues to provide customised applications, and by working with wearable device manufacturers to create related applications.
“Stakeholders should work together to identify the most reliable and accurate indoor positioning technologies that can steer the indoor connectivity market forward,” said Ramkumar “The In-Location Alliance is one such initiative formed by market participants to discuss and resolve issues concerning indoor positioning technologies.”
Esri announced the release of ArcGIS for Electric and ArcGIS for Gas—ready-to-use maps and apps designed for utilities. Both are freely available to Esri customers. Developers and utility experts at Esri spent years studying industry needs and trends to come up with solutions that help utilities quickly respond to outages and engage with customers.
“It’s never been easier to geoenable your utility,” said Bill Meehan, Esri’s director of utility solutions. “ArcGIS for Electric and ArcGIS for Gas will help utilities get much more value from their data. More than that, this is a chance for utilities to truly revolutionize their business.”
ArcGIS for Electric includes damage assessment and streetlight problem apps, along with a public outage viewer to help utilities communicate with customers during an outage. ArcGIS for Gas includes damage assessment apps and an exposed pipe collector app. Both applications also help Esri customers get started quickly with ArcGIS Online, where they can create and share interactive maps and apps. They can also access ready-to-use content, apps, and templates available for the web, smartphones, and tablets.
Supergeo announced that SuperSurv for iOS V0.99 is now available on the App Store for trial.
According to the announcement, SuperSurv, the mobile GIS application designed for field survey, integrates with GIS and GPS technologies to provide functions like Map Display, Query, Measure, etc, and supports point, line and polygon data collection and offline data editing. In addition to the Android edition, SuperSurv is now available for iOS users to collect spatial data.
SuperSurv for iOS V0.99 trial is now available on the App Store. OpenStreetMap can be employed as the basemap in SuperSurv to help filed surveyors collect point, line and polygon feature and the attribute data. The collected data can be saved in vector layers (SHP format) and exported through iTunes to be applied in various GIS programs.
SuperSurv for iOS full version will contain the functions, like Waypoint, GPS Track, Measure Function, Query, and reading and editing the services published by SuperGIS Server 3.1a. The full function is planned to be launched in the beginning of 2014. To learn more about SuperSurv for iOS, please download the trial on App Store.
Supergeo announced that SuperSurv for iOS V0.99 is now available on the App Store for trial.
According to the announcement, SuperSurv, the mobile GIS application designed for field survey, integrates with GIS and GPS technologies to provide functions like Map Display, Query, Measure, etc, and supports point, line and polygon data collection and offline data editing. In addition to the Android edition, SuperSurv is now available for iOS users to collect spatial data.
SuperSurv for iOS V0.99 trial is now available on the App Store. OpenStreetMap can be employed as the basemap in SuperSurv to help filed surveyors collect point, line and polygon feature and the attribute data. The collected data can be saved in vector layers (SHP format) and exported through iTunes to be applied in various GIS programs.
SuperSurv for iOS full version will contain the functions, like Waypoint, GPS Track, Measure Function, Query, and reading and editing the services published by SuperGIS Server 3.1a. The full function is planned to be launched in the beginning of 2014. To learn more about SuperSurv for iOS, please download the trial on App Store.
November 29, 2013, marks the 210th anniversary of the birth of Christian Doppler. His work laid down the fundamental concepts that enabled researchers at Johns Hopkins University in the United States to make observations on the signals of Sputnik I during the International Geophysical Year of 1957. From those observations more than 60 years ago, we can trace the development of GNSS as we know it today. The very genesis of GNSS drew on the combined science, technology, and innovation from Europe, the United States, and Russia. Today, GNSS is a truly global technology that has changed for the better the lives of an estimated one billion people.
2013 also saw a major milestone in the global history of GNSS with the announcement by the European Space Agency (ESA) that the Galileo system had generated its first position fix using operational space vehicles. Here at Trimble we have for some time been providing user equipment that is ready for the modernized, multiple-constellation environment emerging in the coming years. It is still exciting to see the plans of the GNSS operators gradually become a reality, whether it is the ongoing deployment of Galileo and BeiDou or the modernization of GPS and GLONASS. There is no doubt that GNSS users worldwide will benefit significantly from these new developments, and it is natural to expect that we will see continued user-driven adoption and integration of these systems in the year ahead, together with new applications and services that make full use of the expanding GNSS capabilities.
Global Addiction to Accuracy
We have come to expect — if not demand — that technologies continuously evolve to become faster, smaller, and more cost-effective, while also providing expanded functionality and benefits. For GNSS, this expectation includes increased accuracy and precision for a growing proportion of the total user base, together with a desire to determine location in more places or, ultimately, ubiquitously.
From a technological perspective, the trend to increased accuracy is moving beyond local or regional land- or satellite-based differential augmentation toward global networks and services. New technologies such as Trimble RTX use data from a global network of GNSS stations together with global connectivity and communications to facilitate precise point positioning without the need to connect to local or regional reference station networks. Such capabilities simplify the user’s experience with precise positioning, while at the same time vastly expanding the areas on Earth where such positioning can be quickly and conveniently carried out.
Over the past decades, high-precision GNSS positioning has been adopted by increasingly larger numbers of users in the context of end-to-end work-process solutions in industries from agriculture to construction, surveying and mapping, energy, mining, utilities, transportation, and government, to name but a few. With assets, workers, and work sites spread over large geographic areas, these industries and operations have transformed how their work is done through the use of systems that incorporate real-time location information. While we should expect adoption and advancement in these areas to continue due to the compelling economic, safety, and environmental benefits provided, we should also expect to see increasing adoption of high-precision GNSS positioning in new applications such as intelligent transportation and within some proportion of the consumer user base. Accuracy is, after all, addictive.
Availability, Too. Along with accuracy, availability of position is also proving to be addictive; once we come to depend on location-enabled systems in our professional and personal lives, our needs and expectations will naturally tend toward that of continuous availability at all times and regardless of location. Although new constellations with more satellites and new, stronger signals help in this regard, augmentation of GNSS plays a key role on the path to more robust ubiquity. From a Trimble perspective, many of our new product launches during the past year incorporated deep integration of multiple measurement technologies. New systems combine GNSS with inertial measurement units, gyros, tilt sensors, seismometers, optical measurement, imaging systems, lasers, and other sensors or technologies, all enabling location and movement determination (increasingly in three dimensions) of more objects in more places — including, in some cases, even inside buildings. Looking to the future,we can expect the appetite for ubiquitous positioning to continue unabated.
Multiple sensors are also used to collect non-geographic information. Increasingly, innovation is taking place at the intersection and aggregation of many different types of data, providing new insights and enabling more informed, more timely, and more insightful decisions across almost every facet of human activity. GNSS is rapidly expanding its role as an enabling technology in this regard. While we know that delivering consistently accurate positions is a decidedly nontrivial achievement, those positions are often just one component of increasingly large and complex endeavors. In fact, much of the innovation today lies in applications that enable new, more efficient approaches to work and enterprise management, and in the creation of new and powerful analytics from aggregated data.
Global Utility, Global Business
2013 marks another important anniversary: GPS officially reached Initial Operating Capability twenty years ago on December 8, 1993. In his 2011 State of the Union address, U.S. President Barack Obama cited GPS, along with the Internet, as key examples of how government-funded fundamental research can stimulate innovation and create whole new industries. The combination of those two technologies has transformed our lives in ways even the early visionaries may not have imagined. The U.S. government has contributed to the global success of GPS in ways beyond technological innovation. Following the 1983 Korean Airlines 007 disaster (caused in part by inaccurate navigation), President Reagan declared that GPS should be free and available to all, providing a stable policy foundation upon which successive U.S. administrations have continued to build, increasingly recognizing the importance of civilian GPS applications.
Importantly, the United States strengthened this open-access policy framework by publishing the Interface Control Document for GPS, which enabled entrepreneurs and innovators anywhere in the world to bring to life their ideas about how this new technology in space could be used on Earth. For the most part, other governments have followed U.S. leadership in announcing predictable policy access to worldwide satellite positioning and timing availability, allowing innovation to take place wherever it may. In the process it spawned a truly global industry.
Technology alone has not achieved the global impact of GNSS. Rather, it is the combination of technology, a transparent, stable policy environment conducive to global innovation and adoption, and the economics of a global market that together have led to so many people today enjoying the benefits that GNSS provides. Such alignment is equally important for the future: just as GNSS from the beginning built upon knowledge and achievement from around the world, its full international potential will be best realized through global, user-driven innovation, vibrant international entrepreneurship, and robust open markets. Given that we are still far from reaching that full potential, there is good reason for us all to have great expectations of GNSS operators, the industry, and the user community in 2014 and beyond.
Peter O. Large joined Trimble in 1996 and has served as a vice president and a member of the executive committee since 2010. He holds a BSc (Hons) in surveying and mapping science from the University of Newcastle upon Tyne, UK, and an M.S. in management from Stanford University.
Esri introduces the public beta version of its cloud-based Geotrigger Service that helps developers easily create location-aware apps for iPhone and Android without compromising battery life. The beta Geotrigger Service is available at no cost and feedback from developers will be used to shape the official release.
The Geotrigger Service allows apps built on the Esri location platform to quickly gather business intelligence such as where people are and when the app is used. Developers can also design apps that send messages to users when they arrive at or leave areas defined by a geofence.
“On the Esri location platform, we already offer a host of services for developers from geocoding and geoenrichment to routing maps. The Geotrigger Service boosts this offering with location-awareness and location-based alerts,” said Johan Herrlin, Esri’s senior business strategist.
Developers can use the Geotrigger Service for apps across all industries including:
·Retail and Loyalty: Engage customers with personalized content and deals the moment they enter a store.
·Real Estate: Send messages to prospective home buyers when their search criterion matches a nearby home.
·Energy Management: Use location to automatically manage power consumption at home or in the office.
·Tourism: Bring public attractions to life by informing tourists of interesting locations as they explore a city.
·Public Alerts: Notify citizens about events such as road closures or civic emergencies based on past locations.
Esri’s releases new versions of Collector for ArcGIS and Operations Dashboard for ArcGIS include display, configuration, and workflow enhancements that improve field data collection and enterprise oversight. Both apps are available at no cost to Portal for ArcGIS customers and ArcGIS Online subscribers.
According to the announcement, Collector for ArcGIS is a configurable field data collection app for iOS and Android. The new version of Collector includes support for iPad and Android tablets. Templates, selection results, directions, and more, can now be viewed alongside the map on mobile devices with larger screen real estate. The updated Collector app also expands the types of data that can be collected. It now allows the input of GIS features of all primary shape types (e.g., points, lines, and polygons). The app also gives you the ability to view and control GPS accuracy when capturing features so you can stream positions from the GPS as you move.
Data capture often involves recording repetitive information at different locations and/or multiple features of different types at the same location. To reduce that manual repetition, Esri introduced a continuous collect mode that allows you to copy the location or attributes of the last collected feature.
Esri reports that they also updated Operations Dashboard for ArcGIS, that provides a common operational picture for monitoring, tracking, and reporting events to people within your organization. The new version of Operations Dashboard improves the way you work with data. Because you can potentially use Operations Dashboard to view extensive lists of information, Esri added the ability to search within lists to quickly find what you need. You can now see charts, graphs, custom text, and photo attachments within the pop-up windows. You can also filter the map and all widgets using relative time, such as within the last hour or month, or after a specific date. This helps you monitor and analyze data that changes rapidly over time.
Operations Dashboard for ArcGIS now fully supports Portal for ArcGIS as well as ArcGIS Online. A new configuration utility is available to Portal customers, making it easy to sign in and deploy the Operations Dashboard app on-premises.
Collector for ArcGIS can be downloaded from the Apple App Store and Google Play. Operations Dashboard is available through ArcGIS Online. Portal for ArcGIS users can access the Operations Dashboard app from the Customer Care portal.
The U.S. Department of Transportation’s Federal Aviation Administration (FAA) released its first annual Roadmap outlining efforts needed to safely integrate unmanned aircraft systems (UAS) into the nation’s airspace. The Roadmap addresses current and future policies, regulations, technologies and procedures that will be required as demand moves the country from today’s limited accommodation of UAS operations to the extensive integration of UAS into the NextGen aviation system in the future.
“Government and industry face significant challenges as unmanned aircraft move into the aviation mainstream,” said U.S. Transportation Secretary Anthony Foxx. “This Roadmap is an important step forward that will help stakeholders understand the operational goals and safety issues we need to consider when planning for the future of our airspace.”
According to the announcement, the Roadmap outlines the FAA’s approach to ensuring that widespread UAS use is safe, from the perspective of accommodation, integration, and evolution. The FAA’s main goal for integration is to establish requirements that UAS operators will have to meet in order to increase access to airspace over the next five to 10 years. The Roadmap discusses items such as new or revised regulations, policies, procedures, guidance material, training and understanding of systems and operations to support routine UAS operations.
“The FAA is committed to safe, efficient and timely integration of UAS into our airspace,” said FAA Administrator Michael Huerta. “We are dedicated to moving this exciting new technology along as quickly and safely as possible.”
The FAA reports that the Roadmap also addresses the evolution of UAS operations once all requirements and standards are in place and are routinely updated to support UAS operations as the National Airspace System evolves over time. The document stresses that the UAS community must understand the system is not static, and that many improvements are planned for the airspace system over the next 15 years.
The FAA plans to select six UAS test sites to begin work on safely integrating UAS into the airspace. These congressionally-mandated test sites will conduct critical research into how best to safely integrate UAS systems into the national airspace over the next several years and what certification and navigation requirements will need to be established.
The use of UAS, both at the designated test sites and in the national airspace generally, raises the issue of privacy and protection of civil liberties. In February, the FAA asked for public comments specifically on the draft privacy requirements for the six test sites. Today, the agency sent a final privacy policy to the FederalRegister that requires test site operators to comply with federal, state, and other laws on individual privacy protection, to have a publicly available privacy plan and a written plan for data use and retention, and to conduct an annual review of privacy practices that allows for public comment. Information about the test site selection process and final test site privacy policy is available at: http://www.faa.gov/about/initiatives/uas/
For the next several years, the FAA will continue to use special mitigations and procedures to safely accommodate limited UAS access to the nation’s airspace on a case-by-case basis. The Roadmap notes that this case-by-case accommodation will decline significantly as integration begins and expands, but will continue to be a practical way to allow flights by some UAS operators in certain circumstances.
In addition to the FAA’s Roadmap, as required in the 2012 FAA Reauthorization, the Joint Planning and Development Office (JPDO) has developed a comprehensive plan to safely accelerate the integration of civil UAS into the national airspace system.. That plan details a multi-agency approach to safe and timely UAS integration and coordination with the NextGen shift to satellite-based technologies and new procedures.
Cambridge Consultants introduces radar-based technology detection system to help agricultural vehicles avoid collisions. The new radar system helps prevent this by protecting the perimeters of the vehicle from potential hazards – giving audible and visual warnings to the driver.
“We have identified a huge demand for this type of agricultural technology as we see a continued increase in advanced farming techniques in the face of impending population growth and food shortages,” said Gary Kemp, programme director at Cambridge Consultants. “We’ve created practical technology that’s simple to operate and install but is also low cost and incredibly effective.”
According to the announcement, the radar units are designed to be installed on the front and rear of a vehicle as well as on the boom ends, and can detect multiple collision hazards in a wide field of view which maximises coverage. The technology can process many different moving and stationary obstacles – and instantly send an alert to the driver to warn of a potential collision. The low-frequency (5.8GHz) system is based on standard manufacturing principles, making it a cost-effective solution. The patented short-range radar technology provides unbeatable performance from a compact, low-cost sensor. The sensor simultaneously tracks multiple objects in 3D over a wide field of view and up to 30m range. Real-time collision prediction algorithm identifies hazards early, giving the driver ample time to take avoiding action
The company will be showcasing its latest farming technology at the Agritechnica International Exhibition, November 12-15, in Hanover, Germany, hall 17, stand C38.