By Ugo Celestino, European Commission, Antonella Di Fazio, Telespazio SpA, Vicente José Giner Herrera, Ineco, Patrizio Vanni, ENAV SpA, and Francisco Javier Deblas, ESSP.
This article describes a live demonstration of an aviation application in Tunisia, to help the local aviation community in validating the use of the European Geostationary Navigation Overlay Service (EGNOS) to guide airplanes during landing operations. This activity constitutes the first complete experience of EGNOS Safety of Life (SoL) service for aviation approaches outside Europe. We present here the obtained results that are useful not only for Tunisia, but as a valuable case study for other countries outside Europe interested in using EGNOS in aviation.
EGNOS, operational since 2009, has a European regional coverage that could be quite easily extended to areas adjacent to European Union through the deployment of limited additional ground infrastructure elements, but sharing the same existing space segment and leveraging the other core ground infrastructure.
The European Commission has put in place a series of actions since 2006 to support the EGNOS service extension in neighbouring areas. The MEDiterranean follow-Up for EGNOS Adoption (MEDUSA) is an on-going European initiative related to EGNOS extension in the Euromed region, including North African and Middle East countries around the Mediterranean basin: Algeria, Egypt, Israel, Jordan, Lebanon, Libya, Morocco, Palestine, Syria, and Tunisia. MEDUSA runs a program of technical assistance action in these Euromed countries, in order to prepare them for an optimal adoption and exploitation of European GNSS services in their priority market segments.
The Mediterranean Extension of EGNOS
EGNOS is Europe’s first venture into satellite navigation and paves the way for Galileo, Europe’s independent global satellite navigation system currently under deployment.
EGNOS is a satellite-based augmentation system (SBAS), whose signal is compliant to the international SBAS interoperability standards: standards – MOPS (Minimum Operational Performance Standards) and ICAO SARPs (International Civil Aviation Organization Standard and Recommended Practices). In its current version (V2) it augments the open public service offered by the American Global Positioning System (GPS), by providing correction data that enables to improve GPS position accuracy, and provides integrity information about the GPS system (integrity information is fundamental for aeronautical applications like approaches). EGNOS is interoperable with the other equivalent regional systems. Today other SBASs are the U.S Wide Area Augmentation System (WAAS), the Japanese Multi-functional Satellite Augmentation System (MSAS), the Indian GPS Aided Geo Augmented Navigation (GAGAN) and the Russian System for Differential Correction and Monitoring (SDCM). The future version (V3) of EGNOS will augment Galileo signal as well.
Today EGNOS is operational, and available for use in aviation since 2011, giving opportunities for users to have more accurate and reliable positioning for enhancing existing applications, developing new applications and particularly the safety critical ones. Already more than 150 landing procedures are operational across Europe (some of them also in countries out of the European Union, such as Switzerland, Norway, Guernsey), with many others under development to reach 100 percent Approaches with Vertical Guidance (APV) coverage in the European instrumental runways as per ICAO recommendation.
EGNOS provides three services:
- EGNOS Open Service (OS), launched in 2009, is delivered free of charge. It is open for use to anyone with an EGNOS-enabled receiver. This can be any receiver compatible with satellite-based augmentation systems. Being based on GPS, the EGNOS signal does not require major changes for receivers. Today, many mass market receivers available on the market are also EGNOS enabled. EGNOS OS is particularly suitable for mass market and some applications like surveying.
- EGNOS Safety-of-life Service (SoL) is authorized for European civil aviation and operational since March 2011. EGNOS SoL delivers the integrity message providing the verification of the GPS system and timely warnings (within six seconds), when the system or its data should not be used for navigation. Since integrity relates to the trust that can be placed in the correctness of the location information supplied by GPS, thanks to this feature EGNOS is able to meet the demands of safety-critical applications in sectors such as aviation.
- EGNOS Data Access Service (EDAS) launched in 2012, delivers a terrestrial commercial data service. It consists of a server that gets the data directly from EGNOS system and disseminates it via terrestrial networks in real time, within guaranteed maximum delay, security and performance. EDAS is particularly suitable for professional applications. It provides EGNOS raw data and corrections enabling software solutions that implement products and value added services built on them.
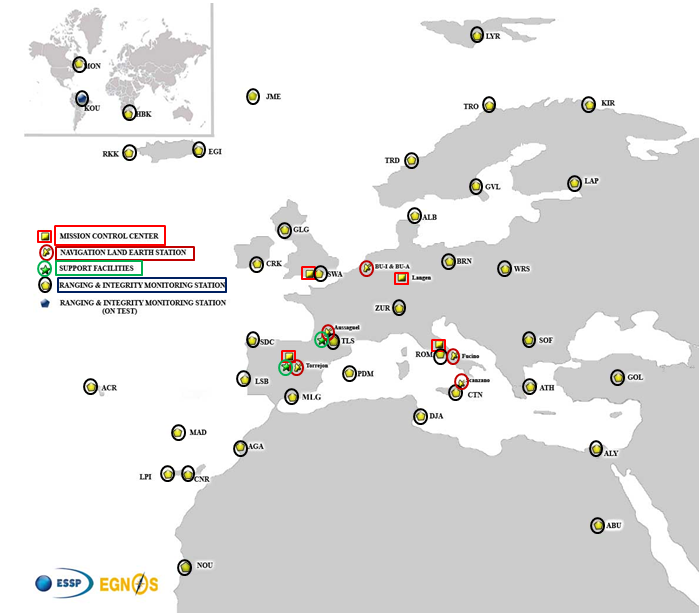
EGNOS infrastructure consists of three geostationary satellites over Europe and a network of ground stations (Ranging and Integrity Monitoring Station – RIMS) located to provide services whose coverage includes southern Europe, North Africa and some Middle East countries.
The EGNOS RIMS network supports a flexible network geometry that gradually adapts to service coverage requirements evolution. From the originally envisaged coverage over European Union’s countries, the EGNOS RIMS network is being expanded over Europe’s neighbouring areas, thus increasing the number of beneficiary countries. EGNOS SoL service is highly sought by several non-EU countries for the benefits it can bring to their civil aviation, in providing a solution to comply with ICAO requirements for Performance Based Navigation (PBN).
The present layout of the EGNOS RIMS network is presented in Figure 1.
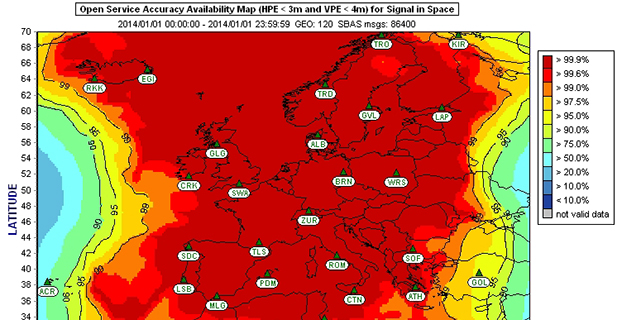
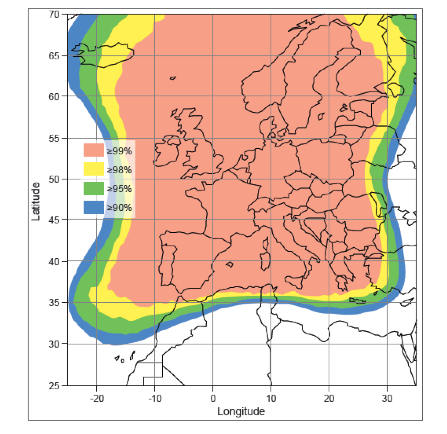
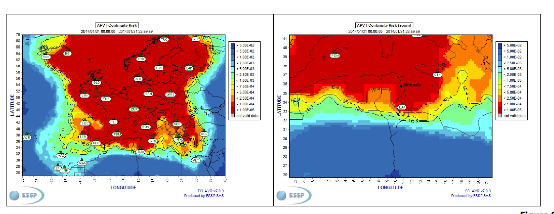
Figures 2 and 3 show respectively today’s coverage of EGNOS OS availability (source: European Satellite Services Provider, the service provider of EGNOS) and the APV-I availability performance commitment provided by EGNOS SoL (source: EGNOS Safety of Life Service Definition Document, EGN-SDD SoL, V2.0, European Commission, 2013), obtained relying on the above presented ground segment.
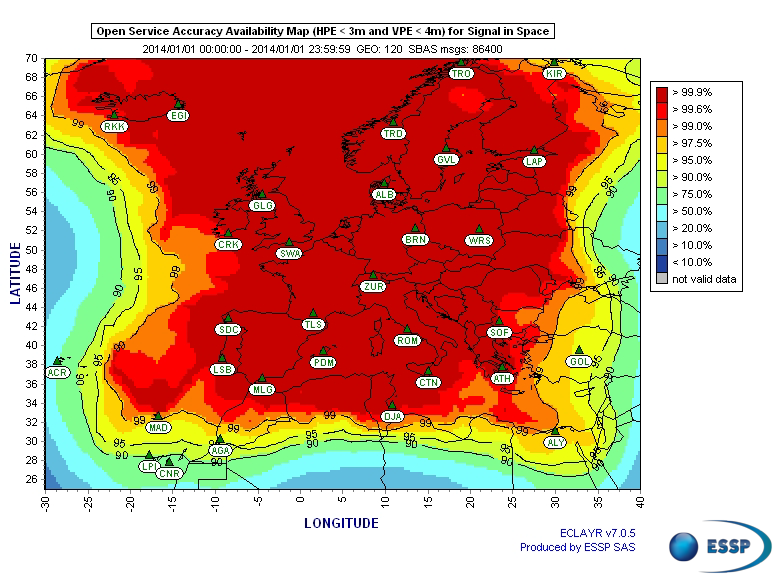
EGNOS OS Availability. The Figure 2 map is obtained by projecting the error at pseudorange level into the position domain. The computed error assumes that the GPS satellites used are those with an elevation angle above the local horizon (with a mask angle of 5º) and does not consider any possible factor depending on local characteristics that could produce different results (optimistic or pessimistic) with respect to the results computed using real receivers located in the considered areas. Moreover, it represents an estimation of EGNOS OS availability during a very limited period of time being an estimation, thus it does not imply any commitment or reference for the performances which can be obtained during different periods.
Other initiatives for a further extension in North Africa and Middle East are already being developed, under the umbrella of the Euromed GNSS programme. In parallel with the infrastructure deployment, the Euromed GNSS programme also includes actions to support the introduction and exploitation of EGNOS services. The first stage was completed in the frame of the Euromed GNSS I/MEdiTerranean Introduction of GNSS Services (METIS) project in the period 2006-2009, the second stage is presently running in the frame of the Euromed GNSS II/MEDUSA project. Further initiatives are being planned for 2015 and beyond.
EGNOS Use in Aviation
EGNOS was initially designed and developed to be used in aviation, similarly to the U.S. Federal Aviation Administration WAAS, to support different types of aviation applications and, in particular, to meet the performance requirements set by the International Civil Aviation Organization (Annex 10) for the implementation of APV-I, which enable the implementation of LPV final approaches, as reported in Table 1.
EGNOS is one of the GNSS elements recognised by ICAO (Annex 10) as a radionavigation aid. It is an important element of a global SBAS systems mosaic, that started with the American system WAAS in 2003, and that is gradually completed by other more recent SBAS: EGNOS itself, MSAS (Japan), GAGAN (India), SDCM (Russia), and some countries like Australia and South Korea that have launched feasibility studies to develop their own SBAS.
It is expected that, in a not too far future, most parts of the world will profit from SBAS services, following the current coverage extension plans and SBAS system evolutions. The final objective, as also shared at ICAO level, is that as many airdromes worldwide, as possible, can offer instrument approaches with vertical guidance, with an outstanding increase in global safety rates.
Additionally, the use of EGNOS allows taking full advantage of GNSS for all phases of flight, including final approach. Therefore, EGNOS means for aviation a fundamental and strategic tool to help meet ICAO’s recommendations, aimed at the adoption of a PBN oriented airspace use policy, for all countries. The 37th Assembly of ICAO (28 September – 8 October 2010) resolved that APV procedures should be implemented as either a primary or backup strategy for precision approaches at all instrument runway ends by 2016.
APV is a major safety initiative. ICAO recognises SBAS and Barometric Vertical Navigation (Baro-VNAV) as the two acceptable (and often complementary) means of implementing APV procedures, which are safer than NPA (Non Precision Approach).
GNSS based navigation enables RNAV (aRea NAVigation) with a higher cost effectiveness in comparison with the old conventional, sensor ground-based, navigation procedures. This is especially true for wide, even desert unequipped areas (or difficult to maintain) like those in North Africa and Middle East.
EGNOS benefits are maximized in final approach manoeuvres, providing GNSS lateral and vertical guidance, and enabling APV-I approaches.
Final approach procedures based on GNSS are classified as RNP approaches (RNP APCH, as shown in the next figure), namely: Lateral Navigation (LNAV) with GPS lateral guidance and no vertical guidance; LP with GPS + SBAS (EGNOS) for lateral guidance (CAT-I localizer performance) and no vertical guidance; Lateral Navigation/Vertical Navigation (LNAV/VNAV) with GPS lateral guidance and Baro-Vertical Navigation (VNAV) vertical guidance (Baro-VNAV approach procedures can be flown with SBAS vertical guidance upon the approval of the Air Navigation Service Provider (ANSP)) and the LPV (Localizer Performance with Vertical Guidance) with GPS + EGNOS for both lateral and vertical guidance.
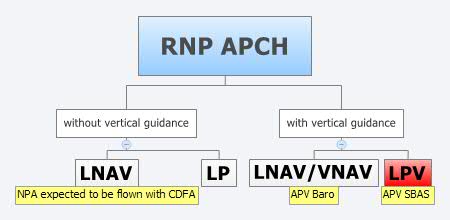
Those procedures not including vertical guidance are intended to be flown with the Constant Descent Final Approach (CDFA) technique (to avoid dangerous dive and drive practices), supported by most Flight Management Systems (FMS).
Regarding the operational LPV main figures, the European regulation (EU OPS -REGULATION (EC) No 859/2008 usually known as EU OPS) allows LPV operational minima (Decision Height – DH) down to 250 ft, expected to be possibly lowered down to 200 ft by 2015 (LPV-200), similarly to what is already permitted by the FAA, in the United Sates for WAAS based LPV approaches (a DH of 200 ft would make LPV approaches very competitive, when benchmarked against ILS CAT-I, precision approach, or even Ground Based Augmentation System (GBAS) CAT-I precision approach).
In the last few years, about 150 LPV procedures (status as of July 2014) have been published in European airports, and the number of procedures and countries introducing EGNOS is continuously increasing.
Euromed GNSS I/METIS and Euromed GNSS II/MEDUSA
In parallel with the development of the infrastructures necessary for extending EGNOS availability across the Euromed region, the European Commission has put in place initiatives to prepare and assist the Euromed countries for the optimal use and adoption of the relevant services.
These consist in two sequential projects, the first being Euromed GNSS I/METIS project and the second being Euromed GNSS II /MEDUSA.
Running from mid 2006 up to the end of 2009, METIS acted as a pioneer in the Euromed countries and built national/regional liaisons with decision-makers and key stakeholders, interested in sharing experience and absorbing know-how. The project assisted the 10 Euromed countries to identify their priorities in relation to the use of EGNOS services, to validate the relevant opportunities from the strategic/social and economic perspectives, and to elaborate a suitable strategy and a plan of actions for facilitating EGNOS adoption and exploitation.
MEDUSA Case Study in Tunisia: LPV Approaches in the Airport of Monastir Using EGNOS
As part of the technical assistance actions programme in the priority domains, MEDUSA implements demonstrations and validations of EGNOS services in concrete applications.
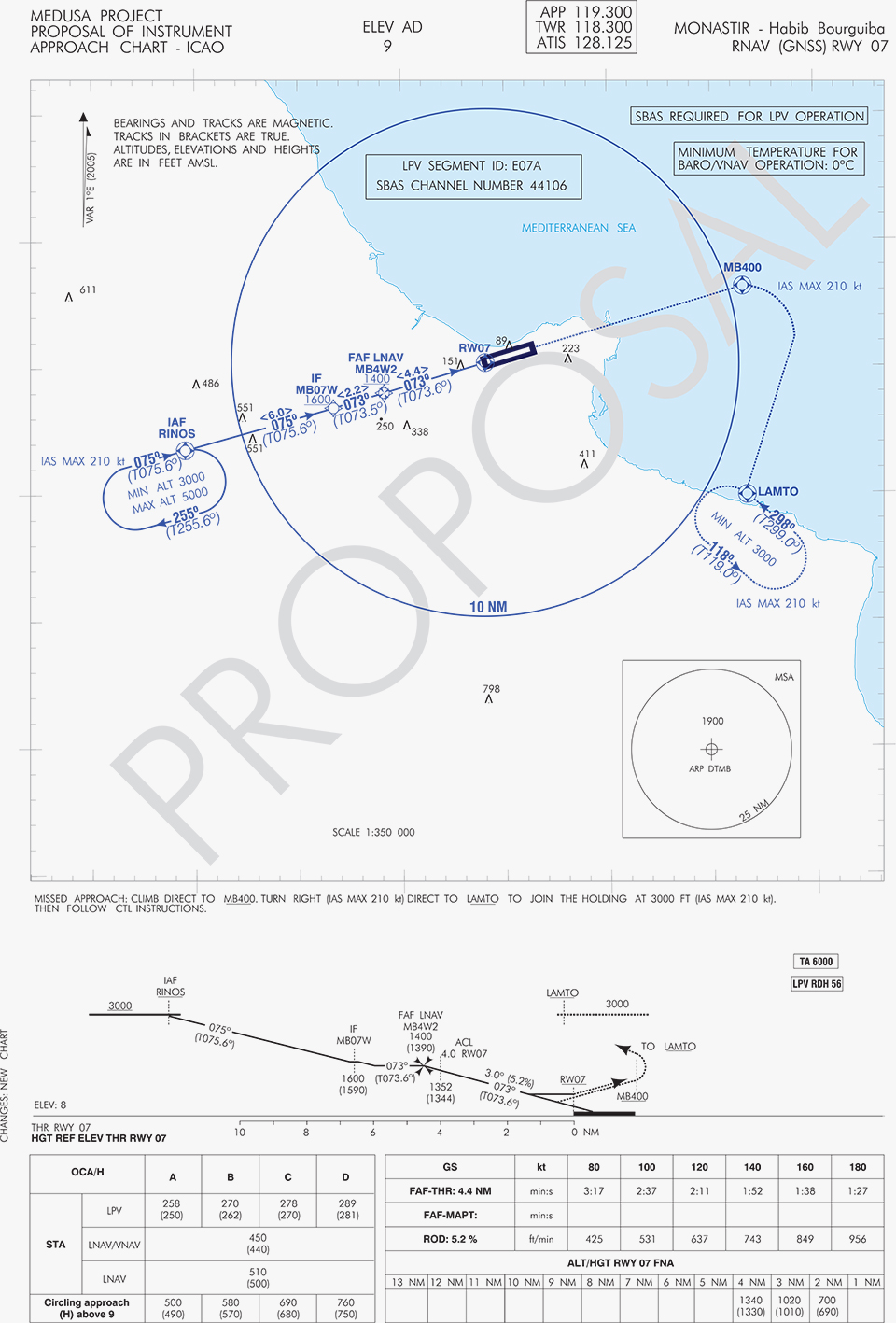
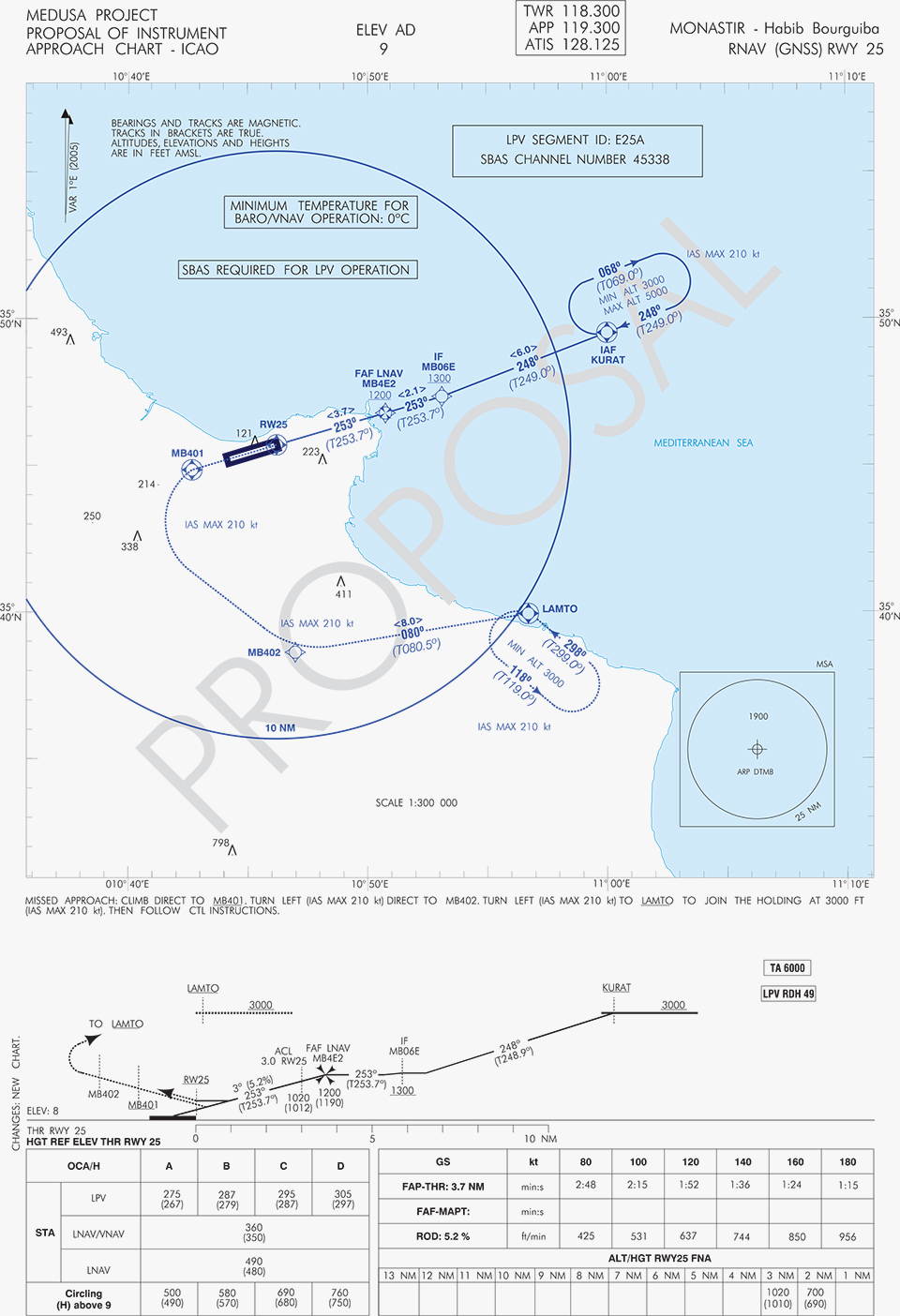
For EGNOS SoL, the technical assistance action consisted in the validation of GNSS approaches, including LPV approaches, designed and constructed in MEDUSA along with the relevant safety assessment and business case for the airport of Monastir in Tunisia (35°45’29’’ N 10°45’17’’ E). The selection of the airport was driven by a trade off between the EGNOS service availability with required APV-I performances and the specific needs of the Tunisian Air Navigation Service Provider – ANSP (OACA, Office de l’Aviation Civile et des Aéroports). According to OACA, Monastir is among the airports in Tunisia presenting favourable conditions, in terms of operational constraints and traffic, for concretely proving the added value of EGNOS for final approaches.
The airport has two runways, RWY 07 and RWY 25, the former is equipped with an ILS CAT-I, the latter only supports NPA approaches. The installation of an ILS in RWY 25 was discarded due to technical constraints. This infrastructure has proven to be insufficient to fully cover the airport needs, that suffers some Delays-Diversions-Cancellations (DDCs) as a result of local specific meteorological conditions, frequent fog banks entering from the sea in the early morning, combined with desert haze. These conditions make LPV ideal procedures, as backups to RWY 07, and enabling APV approaches to RWY 25. Finally, Monastir’s TWR ATC (Tower Air Traffic Control ) staff has been involved in OACA’s PBN development, for which they were ideal candidates to evaluate the benefits possibly achievable from the use of EGNOS.
This MEDUSA’s technical assistance action is the first complete experience for the use of EGNOS SoL service outside Europe. It was conceived as a realistic exercise of RNP APCH procedures implementation, following the guidelines provided by ICAO in the “EUR RNP APCH Guidance Material (EUR Doc 025)” and including all the activities required, from the scenario adequacy study to flight validation and the requirements analysis for the final publication in the AIP (Aeronautical Information Publication). OACA was directly involved in all activities, providing inputs/feedbacks and for training purposes.
A set of three GNSS based approach procedures was produced for each RWY, following ICAO 8168 PANS OPS design principles. The next figures show the combined charts type elaborated, that include minima boxes for three RNP approaches (LNAV, LNAV/VNAV and LPV). The procedures construction preserves the current Monastir arrivals structure, following airspace management principles and facilitating the operational approval. As illustrated in the charts, in both cases for the three minima the calculated OCH (Obstacle Clearance Height) values improve with respect to the already existing conventional approaches, providing significant operational and safety benefits.
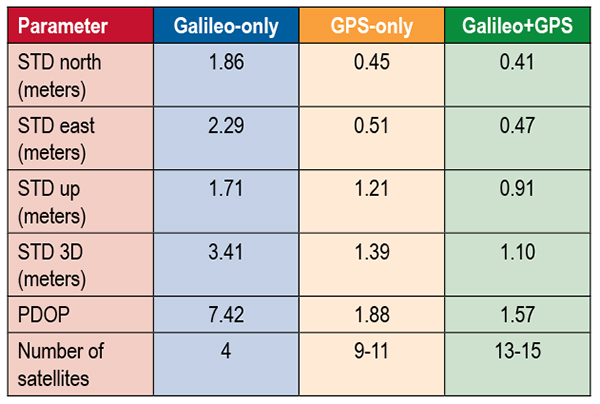
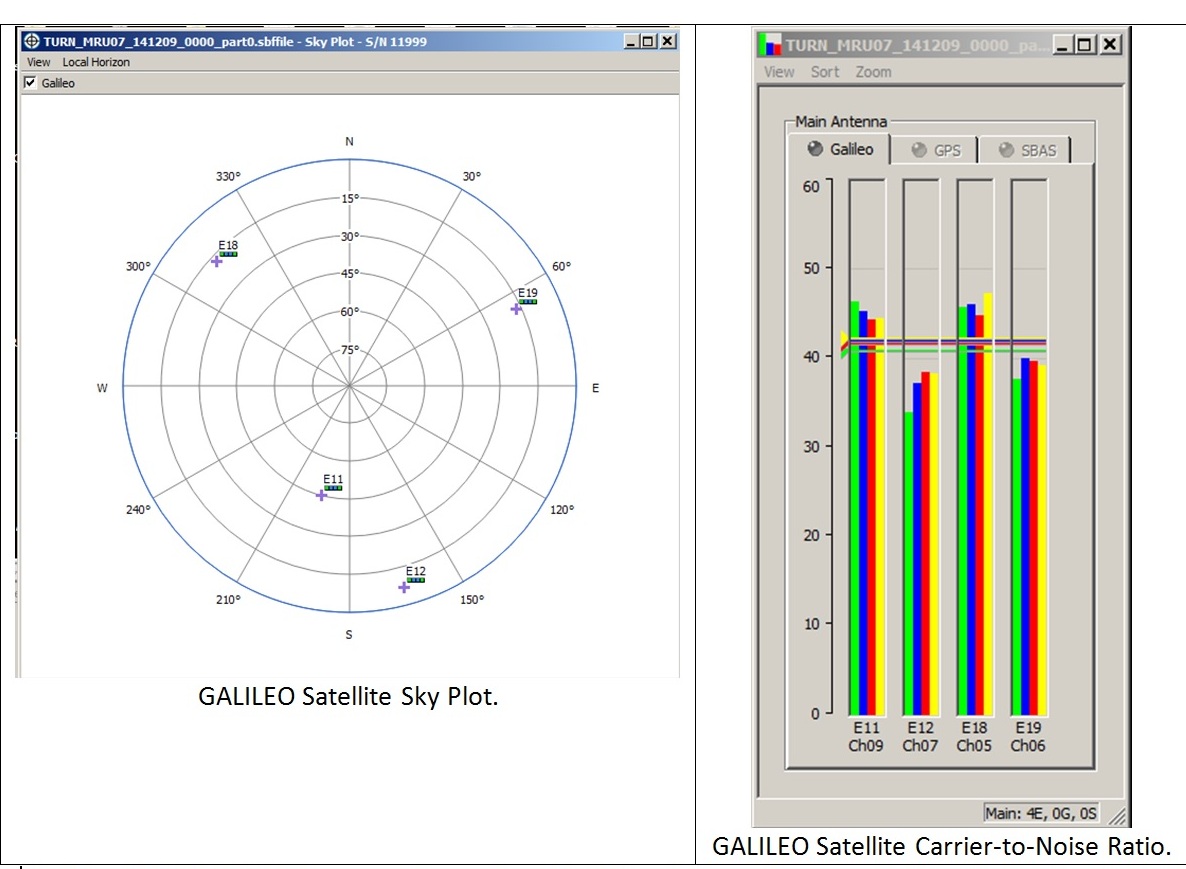
An on-site GNSS performance monitoring campaign was performed by OACA, with the support of GEMCO’s staff, 3 months before the flight trials schedule, covering both EGNOS and GPS signal performances. Besides, an APV-I availability study for the area and specifically for Monastir airport during 1 month before the flight validation was purposely elaborated by the European EGNOS service provider (ESSP). Both analyses, confirmed suitable APV-I performance in terms of availability and continuity, making feasible the implementation of LPV approach procedures in line with ICAO prescriptions.
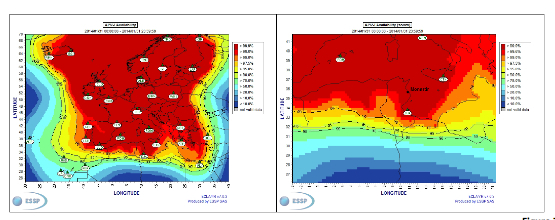
The next figures show the EGNOS APV-I availability and continuity measured on one day during the period of the flight validation (conducted from 30 January to 1 February 2014), in particular at Monastir airport for the considered time-lag:
- APV-I availability was over 99%;
- APV-I continuity presented a total value lower than 5×10-4/15s;
- 95th percentile of Horizontal APV-I accuracy was between 1.1 and 1.2 meters and the 95th percentile of Vertical APV-I Accuracy is around 1.4 meters, thus showing a very good accuracy level;
- Horizontal and Vertical safety indexes were lower than 0.25, representing a very good integrity margin.
Additionally, the results of the on-site GNSS performance monitoring campaign showed quite stable performances with small fluctuations during the whole period of observation, and no problems or outages were observed.
(EGNOS APV-I Availability is defined as the percentage of epochs in a month in which the Protection Level are below Alert Limits for this APV-I service (HPL<40m and VPL<50m) over the total period (source: ESSP).
EGNOS APV-I Continuity Risk is defined as the result of dividing the total number of single continuity breaks using a time-sliding window of 15 seconds by the number of samples with valid and available PA navigation solution. A single continuity break occurs if the system is available at one epoch and becomes not available for the following 15 seconds (source: ESSP).)
The flight validation campaign was carried out according to ICAO doc 9906 with a Piaggio P180 Avanti II (from ENAV flight inspection department) suitably equipped with UNIFIS 3000 system and a Rockwell Collins FMS 3000 with SBAS LPV approach capabilities.

The outcomes of this concrete experience have allowed the Tunisian authorities to identify the main elements for the publication of the validated procedures in their national AIP. They have also contributed to the analysis of the necessary process for the operational adoption of GNSS, including EGNOS, in aviation in countries beyond the EU boundaries.
The activities performed on performance assessment have been preparatory for discussions on GNSS monitoring and data recording on going at ICAO Navigation System Panel level, that would produce ICAO guidelines for States.
Therefore, this Tunisia’s “case study” represents a practical and realistic example that could be beneficial for the other non-EU countries in terms of best practice and lesson learnt. Moreover, methodology and guidelines have been derived to be possibly injected to other non-European countries interested to introduce EGNOS operations in aviation.
Lessons Learned and Outlook
Through its achievements, MEDUSA is opening the way for the introduction of EGNOS SoL service in North Africa and Middle-East region, and it is also defining a suitable path to be followed by other interested non-European countries. Overall, MEDUSA is continuing to confirm the ability to foster cooperation and involvement in EGNOS programme of the great majority of the Euromed countries. Further to Tunisia, other Euromed countries have already expressed their interest in relation to the EGNOS use in aviation, considering each country’s strategy and also in the light of a common shared regional perspective. Besides, the results obtained by MEDUSA are useful also for other regions interested to use EGNOS in aviation.
Additionally, MEDUSA is clearly showing that Euromed region, presently lacking the full support of SBAS technologies, represents an opportunity for EGNOS service extension, with many benefits for the countries of the region and for Europe.
On one hand, being SBAS an effective and efficient technology to enable the aviation community of the Euromed countries to comply with ICAO recommendations on PBN implementation by year 2016 across the region, the services coverage extension of existing SBAS systems (EGNOS in the case of the Euromed countries) can be one of the most efficient ways to move forward. In fact, the Euromed national ANSPs consider the readiness of EGNOS SoL service as one of the main drivers and factors when designing their PBN strategy. EGNOS, which is already operational since 2009 and available for use in aviation since 2011, can deliver added-value services to the Euromed region, just by leveraging the existing European infrastructure with only incremental, marginal and natural extension. The EGNOS coverage extension across the Euromed region can provide significant benefits and particularly to those Euromed countries with few ILS or reduced navaids coverage, and enhance safety and efficiency to the whole aviation community.
On the other hand, the European Union has to gain from an EGNOS-based long term links with its neighbouring regions, by increasing bilateral/multilateral cooperation and interaction (e.g. assistance, mutual cooperation) among public and semi-public bodies (e.g. ANSPs, Civil Aviation Authorities), by strengthening EGNOS SoL coverage in the southern/peripheries of EU (e.g. Malta, Cyprus, Greece, Southernest Italian islands, Canary islands), by pursuing and supporting other EU policies in several sectors (like transports, e.g. harmonizing aviation safety standards across the Mediterranean, Transport Policy of the Mediterranean Partners), and last but not least by achieving a first step towards EGNOS extension to the whole African continent which will bring in similar, additional benefits just described above.
A win-win opportunity to be seized.