Satellites expected to be launched in support of various Global Navigation Satellite Systems are the following:
GPS
May 15: Block IIF-4, SVN66, launch window: 17:39-17:58 UTC
November: Block IIF-5
GLONASS
April 26: Single GLONASS-M or -K satellite from Plesetsk
June 28: Three GLONASS-M satellites from Baikonur
Galileo
October: FOC-1 launch (two satellites)
Indian Regional Navigation Satellite System (IRNSS) June (This is the first launch for an expected constellation of seven satellites, some of which will be geostationary. The constellation will provide continuous regional coverage for positioning, navigation and timing services.)
It appears that GPS SVN49, the Block IIR-M satellite with the problematic L5 test transmitter and operating most recently as PRN27, stopped transmitting standard L-band signals on March 13. No International GNSS Service tracking station has observed the satellite since that date.
The satellite was being used for tests, was set unhealthy, and had not been included in broadcast almanacs.
by James T. Curran, Mark Petovello, and Gérard Lachapelle
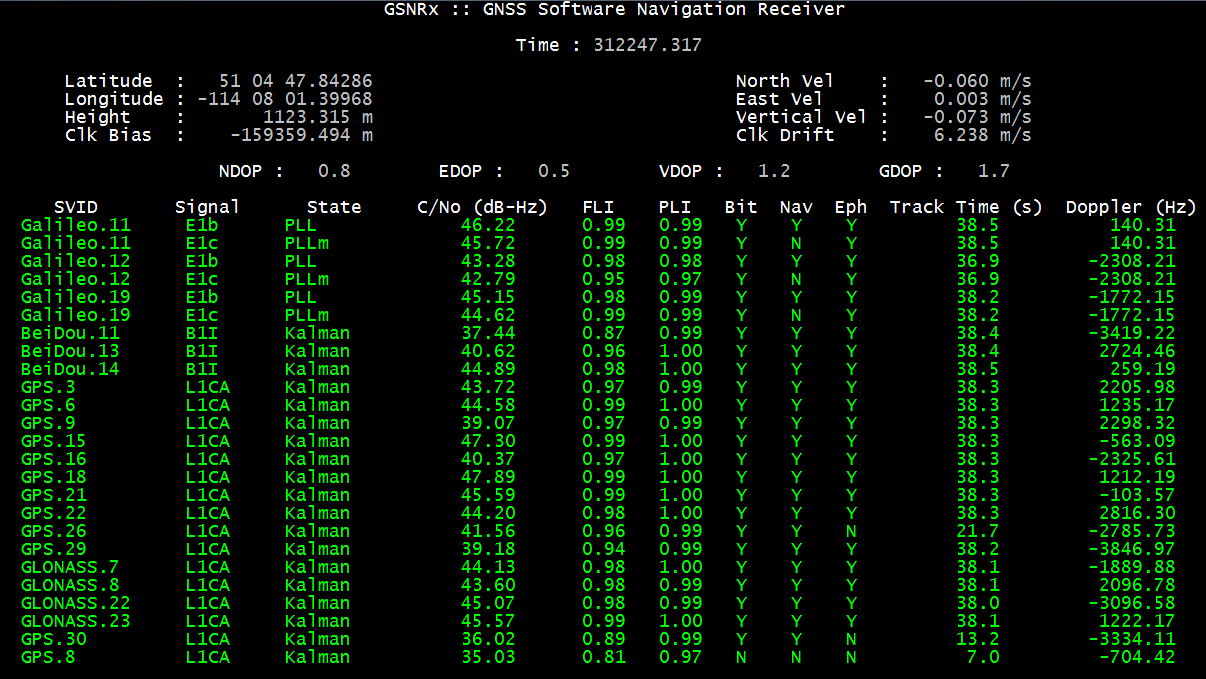
Within a day of their initial activation over central Europe on March 12, Galileo satellites were visible over North America. The PLAN Group of the University of Calgary was successful in capturing and processing the signals from these satellites as they emerged. Galileo PRN 11, 12, and 19 were found and tracked on E1B/C. The PLAN software GSNRx was also able to track simultaneously GPS L1 and GLONASS L1 and produce combined position solutions.
Examining the Galileo navigation message transmitted on the E1B signal, it was found that the satellite health status is flagged as E1BHS=3 meaning Signal Component currently in Test, and the data validity status is flagged as E1BDVS=1 meaning Working without Guarantee. Current Galileo-ready commercial receivers may automatically discard measurements from a satellites broadcasting such messages. Parsing the received words in the I/NAV message, it was noted that more 50 percent of them were of type 0, although all words (types 0 to 10) were decoded at some point during the test.
Data was collected using a roof-mounted NovAtel 702GG antenna and an in-house two-channel digitizing front-end clocked by a high quality OCXO and also a three-channel National Instruments front-end for post-processing. The two-channel intermediate frequency data was streamed live to a laptop computer for real-time processing with GSNRx. Two RF channels were processed, the first centered at 1574.0 MHz with an IF bandwidth of 10.0 MHz, for the GPS L1 C/A and Galileo E1B/C signals and the second centered at 1602.0 MHz again with a bandwidth of 10.0 MHz, for the GLONASS L1 OF signals. The GPS and GLONASS signals were tracked using a Kalman-filter-based tracking strategy while the Galileo signals were tracked using a specialized data-pilot algorithm.
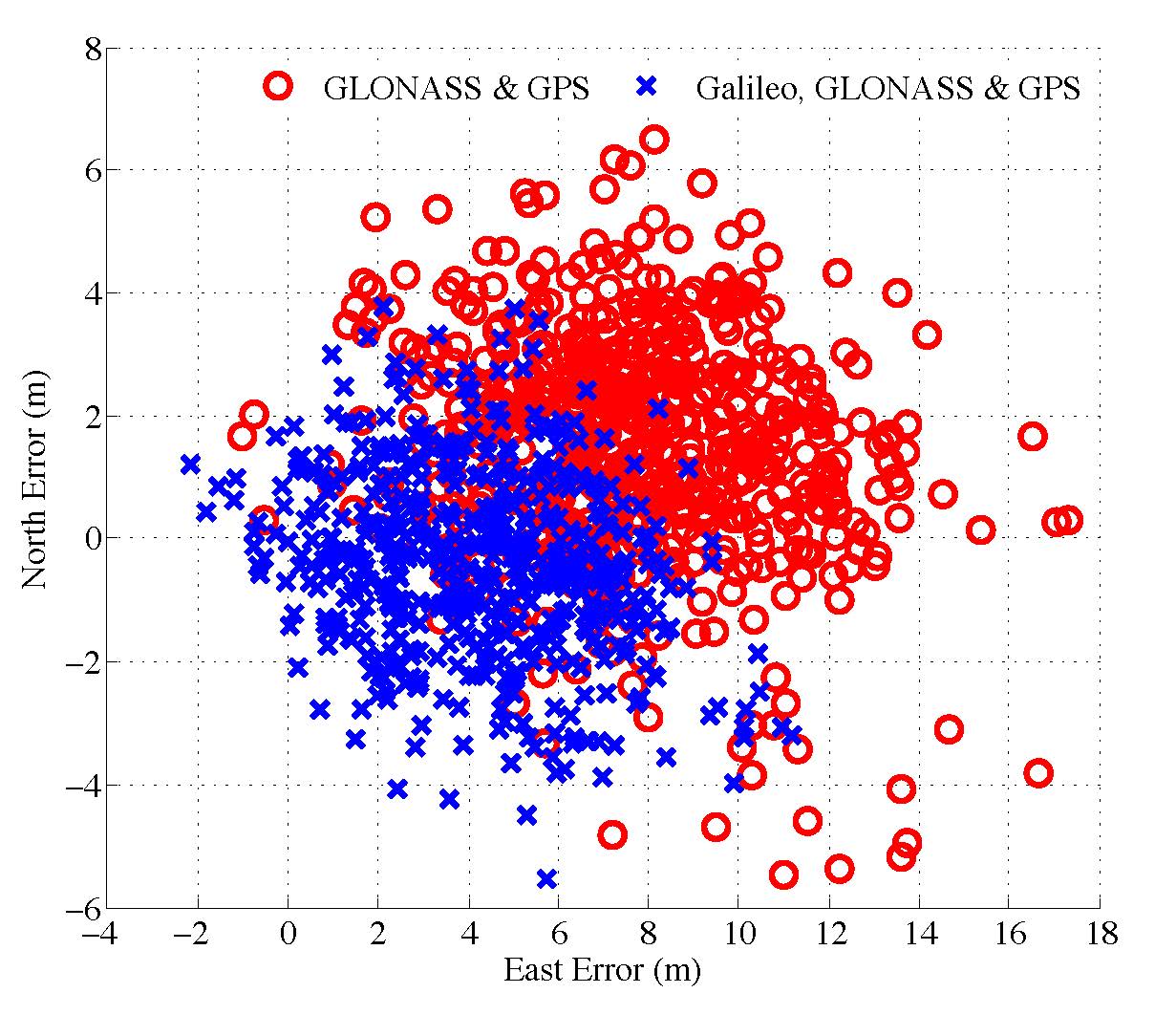
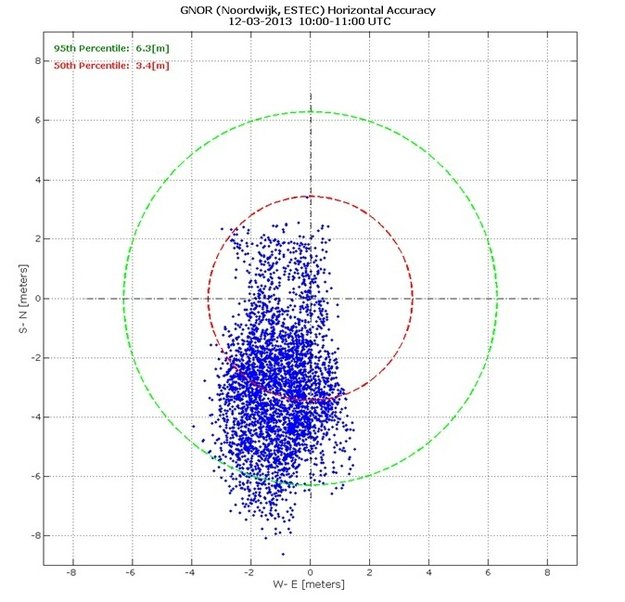
Figure 1. Scatter plot of the north and east position
Pseudorange and Doppler observations were extracted from the tracking strategies at a rate of 2 Hz. A 2D horizontal plot of the combined GPS & GLONASS and the combined Galileo, GLONASS & GPS single-frequency single-point solutions is presented in Figure 1.
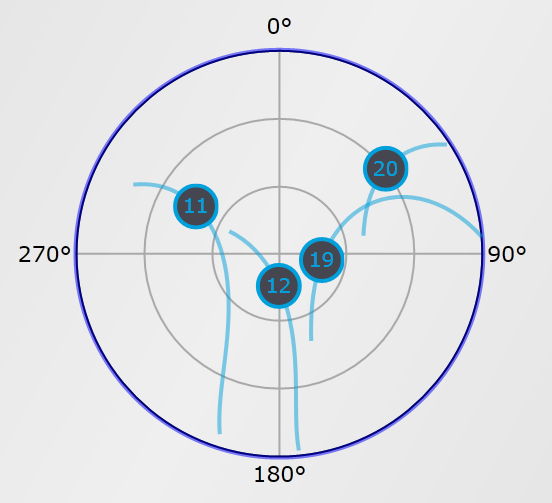
Figure 2: Skyplot of the Galileo satellites.
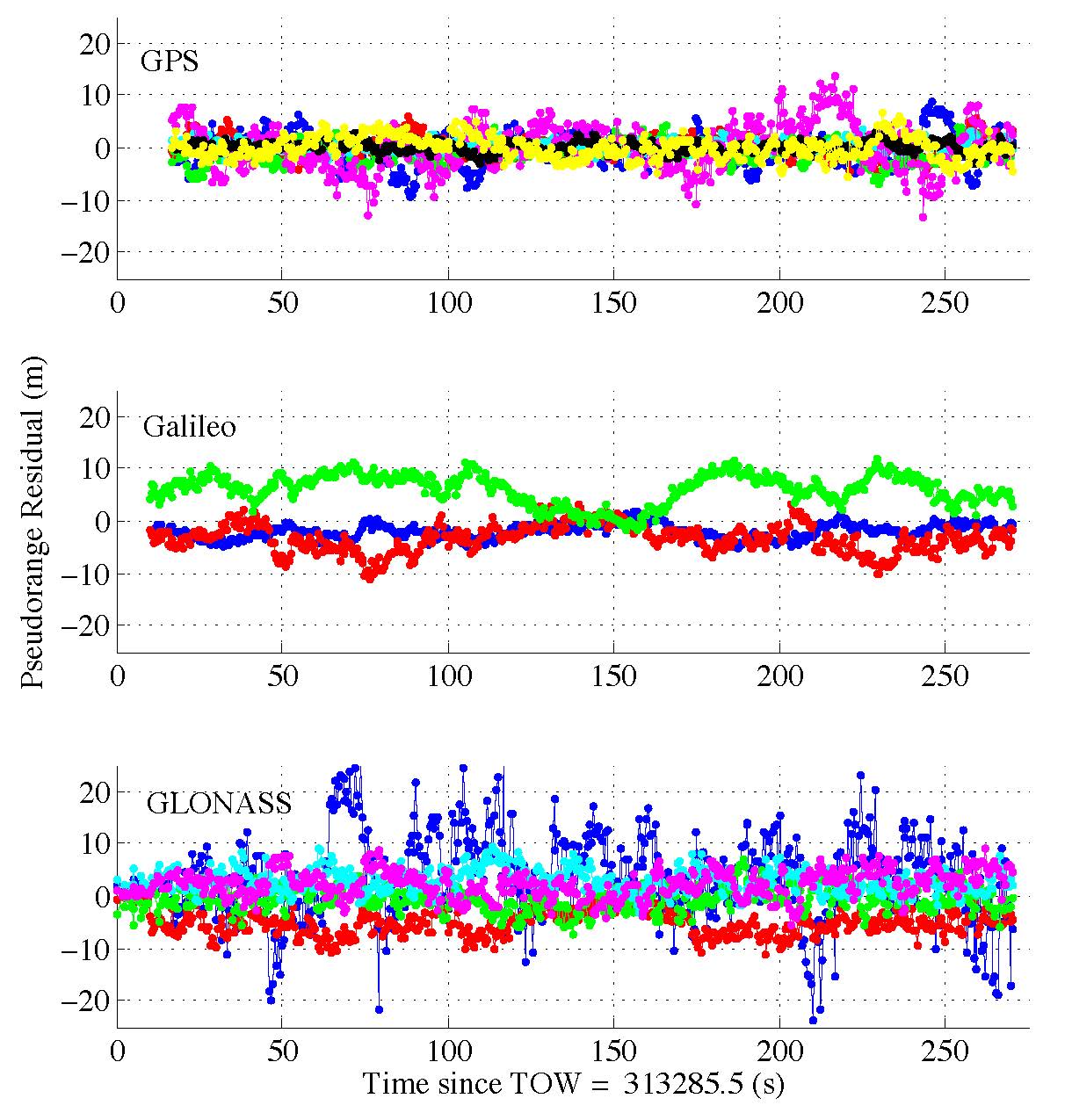
The pseudorange residuals are plotted against time for each PRN tracked from each of the three systems in Figure 3. It is apparent that the addition of the three Galileo observations contributes to a reduction in bias and standard deviation in the horizontal directions, showing an excellent functioning of the Galileo satellites and PLAN Group equipment and software.
Figure 3. Pseudorange residuals are plotted against time for each PRN tracked from each of the three systems.Figure 4. A screenshot of the receiver processing the data.
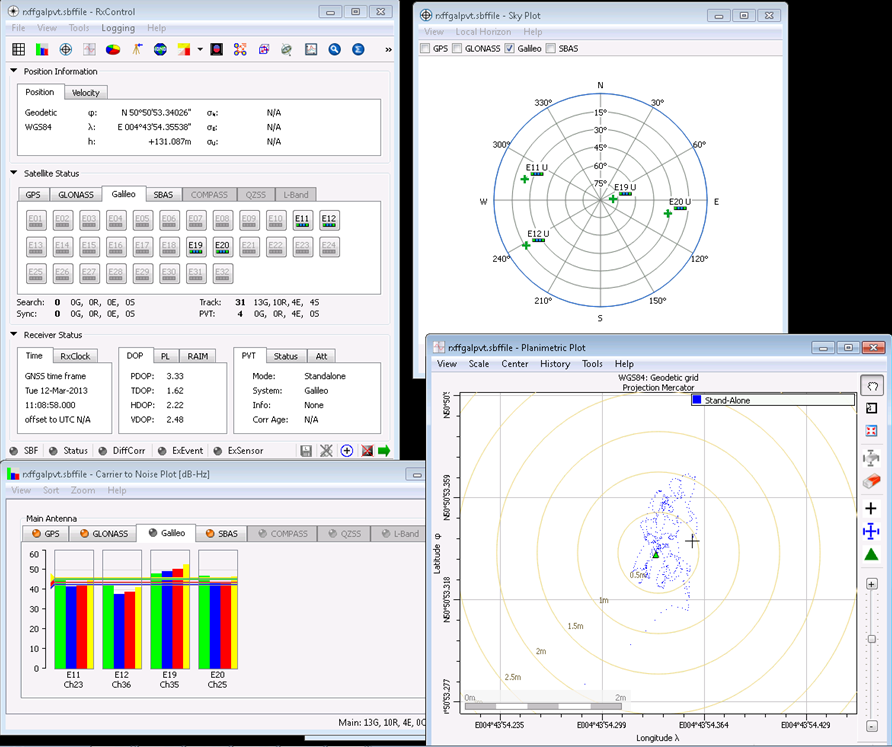
Septentrio became the first receiver manufacturer to report an autonomous real-time position calculation using Galileo IOV satellites, with its own standard commercial receiver. The company based in Leuven, Belgium announced on March 12 that it performed a first autonomous real-time Galileo position, velocity, and timing (PVT) calculation, based on live Interface Control Document (ICD)-compliant Galileo messages from the four Galileo in-orbit validation (IOV) satellites.
The standalone position was calculated from in-orbit navigation messages using a standard PolaRx4 GNSS receiver equipped with commercially released firmware.
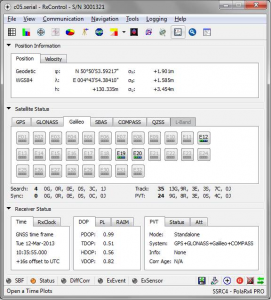
This achievement followed another recent Septentrio milestone; the announcement of a first GPS+Glonass+BeiDou PVT less than two weeks after the BeiDou2 ICD publication in December — and it was itself followed by a Septentrio release stating performance of what it believes to be the first 4-constellation PVT performed by a standard commercial receiver.
“On Tuesday 12-Mar-2013 at approximately 10:35 UTC we included three Galileo IOV satellites (E12, E19 & E20) in a multi-constellation PVT. The 3D-position fix happened shortly after it was brought to Septentrio’s attention that the Galileo IOV satellites were transmitting, for the first time ever, a fully usable navigation message as part of an ESA experiment.
“This ability to rapidly incorporate new constellations demonstrates the flexibility of the architecture of Septentrio receivers,” the company statement continued.
“We are delighted that Septentrio receivers are amongst the first to witness the readiness of the Galileo navigation message to perform a position fix from in orbit signals,” commented Peter Grognard, Septentrio’s founder and CEO. “Septentrio has been involved since 2003 in all major milestones that pave the way for the European constellation genesis.”
RIA Novosti is reporting that German firm Jena-Optronik GmbH has delivered an advanced star sensor to Russia’s Reshetnev Information Satellite Systems company (ISS), which will test and integrate it on a GLONASS navigation satellite, Reshetnev said on Wednesday.
The Astro APS sensor is part of the satellite’s altitude and orbit control system. It will help ensure that the GLONASS satellites maintain an accurate attitude in space.
The sensor will be installed on a GLONASS-M satellite under a 2011 agreement signed between Reshetnev ISS and Jena-Optronik GmbH. It has a single box design with low mass and low power consumption. If tests are successful, it will be integrated on other ISS spacecraft.
CSR plc today announced that its SiRFstarV, SiRFprima and SiRFatlas location platforms are now able to acquire and track satellites and utilize location data from the recently activated BeiDou Satellite Navigation System.
The addition of the BeiDou constellation is part of CSR’s ongoing efforts to support all global navigation satellite systems as they become available, with software or firmware upgrades, for greater performance and enhanced compliance with existing and future requirements of national GNSS systems, the company said.
“CSR is committed to supporting all current and future GNSS constellations with its location platforms to boost location performance by increasing service availability, reducing observation time and making measurements more precise for the most demanding applications,” said Dave Huntingford, director of marketing for location at CSR. “With the addition of these new satellites, our location platforms can now actively utilize GPS, GLONASS, QZSS and SBAS, in addition to BeiDou-2, and they are ready to support Galileo as soon as it becomes available to provide continuous location awareness and the best location-based services experience.”
Rob Yeh, director of product marketing for Automotive SoC at CSR, added, “All CSR’s latest multi-GNSS location platforms, including CSR SiRFatlasVI and SiRFprimaII, are now able to demonstrate live BDS (BeiDou System) navigation, and CSR will include BDS support in all future-generation location platforms. Besides providing flexibility and improved satellite acquisition and location tracking in challenging situations like urban canyons, the BeiDou support also improves CSR’s already industry-leading dead-reckoning technologies.”
CSR maintains an experienced development team in mainland China to develop and support BeiDou-related products and technology.
Also known as Compass and BeiDou-2, the Chinese BDS started operations in December 2012 and has 14 active satellites in service over the Asia-Pacific region available to general users. When fully deployed by 2020, BDS is expected to comprise a total of 35 satellites offering complete coverage around the globe.
Organizers will also be hosting the European Satellite Navigation Competition 2013 International Kick-Off Meeting on April 25.
The European Navigation Conference 2013 will be the 17th conference in the GNSS series held under the auspices of the European Group of Institutes of Navigation (EUGIN). The conference will be hosted by the Austrian Institute of Navigation (OVN) and will take place April 23-25 in Vienna, Austria.
Each year the conference attracts researchers, policy makers, manufacturers, users and service providers from around the world. The conference will focus on the present status as well as on future developments in navigation systems, with special emphasis on Galileo. Thus, the ENC 2013 will be a showcase for state-of-the-art technology and for innovations in the fields of terrestrial and satellite navigation. The implementation of new technologies in navigation will be illustrated in the industry exhibition, running in parallel to the conference.
Entitling its release “From Orbit with Love,” the European Space Agency (ESA) proudly announced today, March 12, 2013, that the first four satellites of the future Galileo Satellite Navigation constellation achieved their first-ever autonomous position fix. The positioning was replicated and confirmed by a team at the NavSAS group of Politecnico di Torino, Italy.
The obtained accuracy lies in the 10-meter range, according to ESA. ESA added that considering the infrastructure is only partly deployed, this fulfills expectations. As with GPS or any satellite navigation system, a minimum of four satellites is required to make a position fix in three dimensions.
The position fix was obtained by ESA’s navigation laboratory in the Netherlands, using the four satellites, launched in October 2011 and 2012, and the Galileo programme’s ground infrastructure, consisting of control centers in Italy and Germany and a global network of ground stations.
“This fundamental step confirms the Galileo system works as planned,” read the official statement.
“Once testing of the latest two satellites was complete, in recent weeks our effort focused on the generation of navigation messages and their dissemination to receivers on the ground,” explained Marco Falcone, ESA’s Galileo system manager.
Measurements of individual Galileo horizontal position fixes performed for the first time using the four Galileo satellites in orbit plus the worldwide ground system between 1000 and 11:00 CET on Tuesday 12 March 2013, showing an overall horizontal accuracy over ESTEC in Noordwijk, the Netherlands, of 6.3 m.
This first position fix of longitude, latitude, and altitude took place at the Navigation Laboratory at ESA’s technical heart ESTEC, in Noordwijk, the Netherlands, early on the morning of March 12, with an accuracy between 10 and 15 meters, which was expected, taking into account the limited infrastructure deployed so far.
“The test of today has a dual significance: historical and technical,” notes Javier Benedicto, ESA’s Galileo project manager. “From the historical perspective, this is the first time ever that Europe has been able to determine a position on the ground using only its own independent navigation system, Galileo. From the technical perspective, generation of the Galileo navigation messages is an essential step for beginning the full validation activities, before starting the full deployment of the system by the end of this year.”
With only four satellites for the time being, the full Galileo constellation is visible at the same time for a maximum two to three hours daily. This frequency will increase as more satellites join the constellation in orbit, along with extra ground stations coming online, for Galileo’s early services to start at the end of 2014.
The European Commission’s program head for Galileo, Paul Flament, granted an interview last week with GPS World, recapping the coming launch activities and expectations for initial and full operational capabilities, the latter with a target constellation of 30 satellites. The interview will appear in the April issue of the magazine, which is specially devoted to Galileo and European navigation initiatives.
With the validation testing activities under way, users might experience breaks in the content of the navigation messages being broadcast, said ESA. In the coming months the messages will be further elaborated to define the offset between Galileo System Time and Coordinated Universal Time (UTC), enabling Galileo to be relied on for precision timing applications, as well as the Galileo to GPS Time Offset, ensuring interoperability with GPS.
Galileo Is Real, and NavSAS Has the Evidence
Almost simultaneously with the ESA announcement, the NavSAS group of Politecnico di Torino and Istituto Superiore Mario Boella in Turin, Italy, also achieved a position fix using the signals of the four In-Orbit Validation Galileo satellites (PFM, FM2, FM3, FM4) that started today to broadcast a valid navigation message. The researchers of the NavSAS team successfully computed the positions by using full software receivers developed by the team.
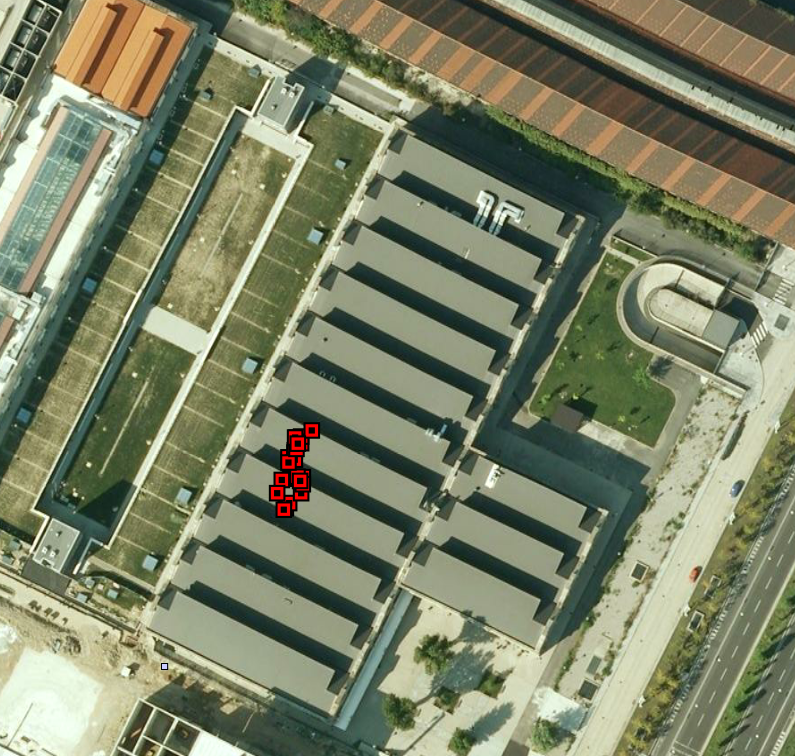
The positions obtained are depicted in Figure 1, as red squares on the rooftop of the NavSAS Lab in Turin, Italy, where the antenna is positioned (latitude 45°03’54.98767″ N, longitude 7°39’32.28920″ E, height 311.9667 meters). The navigation message was first successfully decoded at 11.28 on March 12.
Figure 1. Position fixes on the rooftop of the NavSAS lab in Turin, Italy.
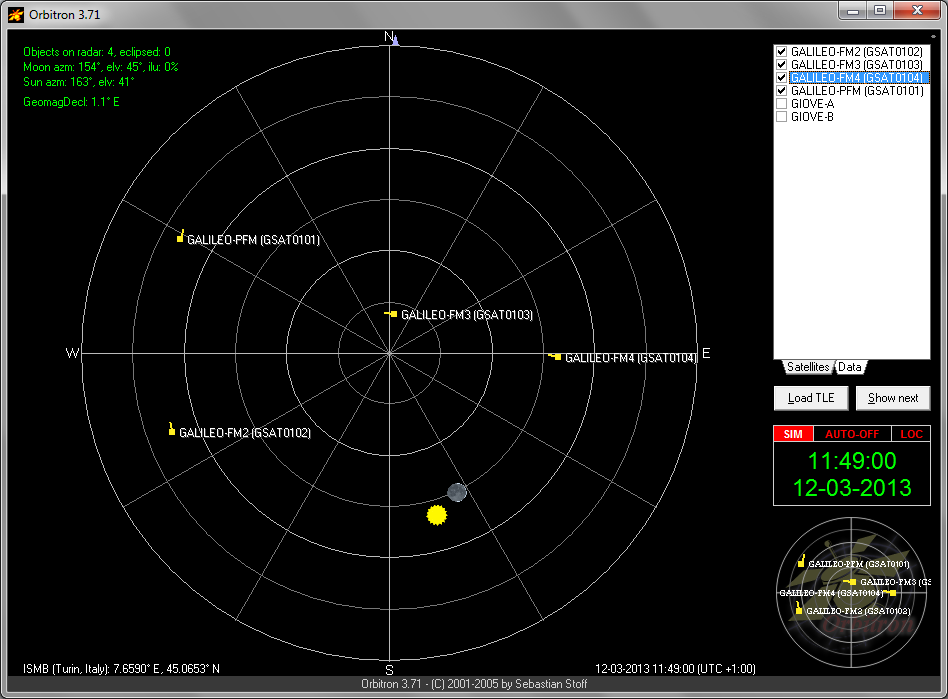
The configuration of the four Galileo satellites as seen by the NavSAS lab is reported in Figure 2.
Figure 2. Skyplot of the Galileo IOV satellites at the time of the data acquisition for the fix.
The NavSAS team was earlier among the first research teams worldwide able to receive and process the signal of the PFM and FM2 satellites, in December 2011 after the launch of the earliest Galileo IOV satellites, and again at the end of 2012 for the FM3 and FM4.
The milestone in both accounts of Galileo-only positioning is that it is real-time positioning using the Galileo navigation message. Galileo positioning using a post-processing mode had already been demonstrated, and described by Peter Steigenberger, Urs Hugentobler, and Oliver Montenbruck of the Technische Universität München and the German Space Operations Center, in an account in GPS World, February 2012 issue. (scroll down to “First Demonstration of Galileo-Only Positioning”).
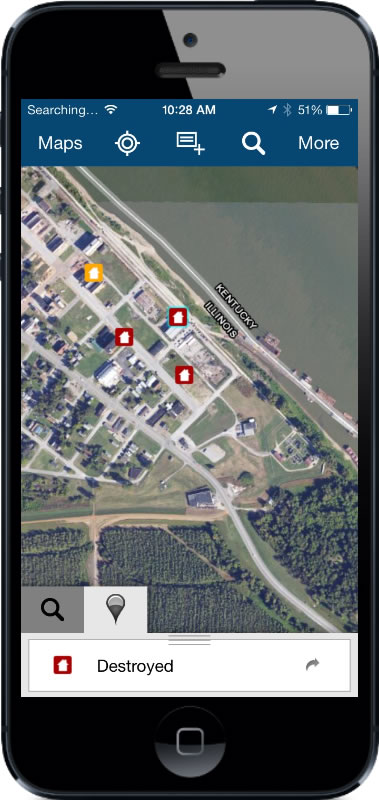
Esri introduced Collector for ArcGIS, which allows users to capture and report spatial and/or tabular information directly from their iPhone or Android smartphone in the field.
The Collector for ArcGIS application simplifies data collection in the field. Data can be recorded using GPS or by tapping on the map. The Collector app provides the ability to plan routes, generate directions, capture photos and video, and seamlessly integrate information back into an organization’s GIS. The app can also be configured for use with various tools to help tailor data collection workflows to users’ specific needs.
The Collector for ArcGIS is available for download from the Apple App Store and Google Play (formerly Android Market).
The Operations Dashboard and Collector applications are available to organizations that have either a 30-day trial or have purchased an ArcGIS Online subscription..
GLONASS 743, recently moved from orbital slot 2 to orbital slot 8, was set healthy on March 5 at 07:28 Moscow Time according to NAGU 017-130305. Although the NAGU states that Moscow Time is three hours ahead of UTC (and this is the time difference normally used for GLONASS as stipulated in the GLONASS ICD), officially, it is actually four hours and has been since the switch to year-round daylight saving time on 27 March 2011. In this case, the NAGU appears to be in error since GLONASS 743 was actually set healthy at 03:28 UTC and not at 04:28 UTC. This is confirmed by Roscomos monitoring and by the navigation data collected by stations of the International GNSS Service (IGS).
There are once again 24 healthy GLONASS satellites on orbit.
For those keeping track of frequency channel changes, GLONASS 743 was switched from frequency channel 6 to channel -6 on 1 March some minutes before 10:45 UTC and back to channel 6 on 2 March, again some minutes before 10:45 UTC as determined from IGS navigation files. Although a NAGU was issued for the first frequency change (stating that it occurred at “1344 MT (UTC+0300)”), no NAGU has been issued to document the second frequency shift although the set-healthy NAGU does give the frequency channel as 6.
Meanwhile, in other GLONASS news, a single GLONASS-M satellite (Block 47s) is to be launched from the Plesetsk Cosmodrome on April 26 at 05:23:41 UTC according to the NASA Forum blog.
“The interest of the navigation community for the European Navigation Conference 2013 is tremendous. We have received more than 150 oral presentations and 50 poster presentations that will be showcased in 32 sessions,” said Susanne Fuchs, organizing committee member. Among those who are taking part as keynote speakers or panelists are:
Paul Weissenberg (Deputy Director General of the DG Enterprise and Industry of the European Commission),
Didier Faivre (Director of Galileo Programme & Navigation Related Activities, European Space Agency),
Carlo des Doride (Executive Director of the European GNSS),
Frank Salzgeber (Head of Technology Transfer Office, ESA),
Gard Ueland (Chairman of Galileo Services),
Bernhard Hofmann-Wellenhof (Vice Rector for Academic Affairs, TU Graz) or Harald Posch (Austrian Space Agency)
The European Navigation Conference 2013 will be the seventeenth conference in the GNSS series held under the auspices of the European Group of Institutes of Navigation (EUGIN). The conference will be hosted by the Austrian Institute of Navigation (OVN) and will take place from 23-25 April 2013 in Vienna, Austria.
Each year the conference attracts researchers, policy makers, manufacturers, users and service providers from around the world. “Thanks to the wide variety of topics in navigation and the outstanding expertise of the attending speakers, we will be able to bring together more than 600 experts,” Fuchs said.
The conference will focus on the present status as well as on future developments in navigation systems, with special emphasis on Galileo. Thus, the ENC 2013 will be a showcase for state of the art technology and, more importantly, for innovations in the field of terrestrial and satellite navigation. The implementation of new technologies in navigation will be illustrated in the industry exhibition, running in parallel to the conference.
The Lockheed Martin team developing the U.S. Air Force’s next-generation Global Positioning System III satellites has turned on power to the system module of the program’s first spacecraft, designated GPS III Space Vehicle One (SV-1). The milestone is a key indication the team is on track to deliver the first satellite for launch availability in 2014, the company said.
The GPS III program will replace aging GPS satellites, while improving capability to meet the evolving demands of military, commercial and civilian users. GPS III satellites will deliver better accuracy and improved anti-jamming power while enhancing the spacecraft’s design life and adding a new civil signal designed to be interoperable with international global navigation satellite systems.
“This milestone is the latest in a series of critical events signifying that our joint government and industry GPS III team is performing efficiently and meeting its commitments,” said Lt. Col. Todd Caldwell, the U.S. Air Force’s GPS III program manager.
Successfully powering on GPS III SV-1 demonstrates mechanical integration, validates the satellite’s interfaces and leads the way for electrical and integrated hardware-software testing. The satellite will complete its Assembly, Integration and Test (AI&T) in Lockheed Martin’s new GPS Processing Facility (GPF) designed for efficient and affordable satellite production. Like in aircraft or automobile manufacturing, each GPS III satellite will move through sequential work stations for various AI&T operations, culminating with shipment to the launch site.
“Turning power on to the first GPS III satellite is a major milestone for the team,” said Keoki Jackson, vice president of Lockheed Martin’s Navigation Systems mission area. “The successful integration of the first satellite’s system module follows on the heels of our pathfinder GPS III Non-Flight Satellite Testbed (GNST), and demonstrates the great value of the investments made by the Air Force to implement low-risk spacecraft acquisition. In this challenging budget environment, we are focused on delivering the critical GPS III capabilities to users affordably and on schedule.”
The GPS III team is led by the Global Positioning Systems Directorate at the U.S. Air Force Space and Missile Systems Center. Lockheed Martin is the GPS III prime contractor with teammates ITT Exelis, General Dynamics, Infinity Systems Engineering, Honeywell, ATK and other subcontractors. Air Force Space Command’s 2nd Space Operations Squadron (2SOPS), based at Schriever Air Force Base, Colo., manages and operates the GPS constellation for both civil and military users.
 Esri introduced Collector for ArcGIS, which allows users to capture and report spatial and/or tabular information directly from their iPhone or Android smartphone in the field.
Esri introduced Collector for ArcGIS, which allows users to capture and report spatial and/or tabular information directly from their iPhone or Android smartphone in the field.