u-blox, has launched two LTE-M cellular module series, the SARA-R52 and LEXI-R52. These modules are designed to meet the needs of industrial applications requiring both positioning and wireless communication capabilities.
Based on the u-blox UBX-R52 cellular chip, these modules are designed for a variety of internet of things (IoT) use cases, including both fixed and mobile applications.
The UBX-R52 chip is designed to simplify product design by reducing the need for additional components. It includes SpotNow, a positioning function developed by u-blox, which aims to provide location data with an accuracy of up to 10 meters within a few seconds. This function is targeted at applications requiring occasional tracking, such as waste management, personal trackers and industrial machinery.
The chips uCPU feature allows the execution of custom software directly on the chip and eliminates the necessity for an external microcontroller unit (MCU). The smart connection manager (uSCM) is a feature designed to manage connectivity automatically, focusing on optimizing performance or minimizing power consumption under varying connection conditions.
The R52 series introduces the SARA-R520M10 combo module, which is equipped with an integrated u-blox M10 GNSS receiver. This module is designed to provide simultaneous GNSS and cellular connectivity, supporting applications that require continuous or periodic tracking with features such as low power consumption, improved time-to-first fix (TTFF) and increased RF sensitivity.
Unlike many LTE-M modules that typically offer an RF output power of 20-21 dBm, the new R52 series modules offer a higher output power of 23 dBm to improve connectivity in difficult coverage areas. The LEXI-R52 offers the same functionalities as the SARA-R52 but comes in a smaller form factor, making it ideal for applications with space constraints, such as wearable technology.
These additions to u-blox’s LTE-M module portfolio are designed to address the integration of GNSS and wireless communication in industrial IoT applications, offering solutions for a range of use cases that require robust connectivity.
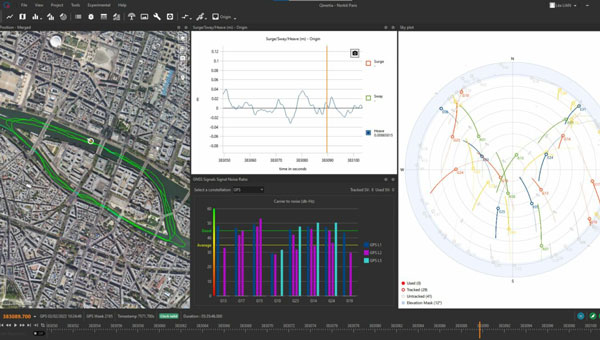
SparkFun Electronics has launched the SparkFun real-time kinematics (RTK) mosaic-X5. It uses the multi-constellation, multi-frequency capabilities of the Septentrio mosaic-X5 module, which aims to improve accuracy and reliability in a variety of position applications.
The RTK mosaic-X5 is a 448-channel receiver that supports all four Global Navigation Satellite Systems (GNSS) — GPS, GLONASS, BeiDou and Galileo — and one of the two regional ones, NavIC. It can function as both an RTK base and rover, which allows users to achieve horizontal positioning accuracy down to 6 mm and updates at a rate of 100Hz.
The device incorporates the Espressif ESP32-WROVER processor, which allows for high-speed processing and a variety of connectivity options. The ESP32 provides the device with USB-C, Ethernet-over-USB and an Ethernet to WiFi Bridge mode to ensure seamless integration into any project setup.
The device also has power flexibility, including USB-C, Power-over-Ethernet, and external DC sources, along with data logging in multiple formats such as RINEX and NMEA. Housed in a custom-designed aluminum case, the RTK mosaic-X5 features a comprehensive web server interface to simplify configuration and monitoring.
GNSS has transformed the way both individuals and machines navigate across the globe, leading to a growing number of organizations utilizing positioning data in the development of products and applications. GNSS technology plays a crucial role in enabling autonomous vehicles, robots, logistics fleets, and emergency response systems to accurately determine the precise locations of places, people, and things on Earth’s surface. As a result, routes are not only more accurate and efficient but also safer.
As a satellite-dependent navigation system, various atmospheric and technological factors can impact the accuracy and precision of GNSS signals. These signals often need to be corrected by receivers before they can be used for positioning, and various correction methods exist today to achieve this. Each method has its own advantages and disadvantages, catering to diverse accuracy requirements and application scenarios.
Five causes of GNSS signal inaccuracies
When choosing the best GNSS correction method for a specific project, it is important to comprehend signal errors and their underlying causes. GNSS errors result from a combination of elements, such as ephemeris inaccuracies, disparities in satellite clocks, conditions in the ionosphere and troposphere, and inconsistencies between various satellite systems. Each signal correction method addresses these elements differently, resulting in pros and cons that must be weighed before selecting and implementing a solution.
1. Inaccurate ephemeris data
To calculate their position on Earth, GNSS receivers need to know the exact position in space of the satellites they use. Satellite positioning and orbital parameters are represented in ephemeris data, but sometimes this data is incorrect. Ephemeris inaccuracies cause the receiver to not know the satellites’ exact positions, thereby degrading the accuracy of their position calculation.
2. Differences in satellite clocks
Even the highly accurate atomic clocks on GNSS satellites can introduce errors in the timestamps receivers use to calculate positions. The exceptionally high speed at which GNSS satellites travel in space (approximately 7,000 mph) adds another layer of complexity to these calculations because even a nanosecond of difference can lead to substantial positioning errors.
3. Conditions in the ionosphere
The ionosphere, the outermost layer of Earth’s atmosphere, consists of charged particles that can affect the speed of light and radio signals as they pass through it. Fluctuations in solar radiation and other ionospheric conditions can result in delays or distortions in GNSS signals, introducing measurement errors that require correction for precise positioning. Although the influence of the ionosphere can result in significant signal interpretation errors, correction methods can effectively model and account for them.
4. Conditions in the troposphere
Weather, which occurs in the troposphere, the innermost layer of Earth’s atmosphere, also impacts GNSS signals as they travel from satellites in space to receivers. Temperature, humidity, and pressure can affect the speed of light and radio signals much like the charged particles of the ionosphere, leading to even more delays and distortion in GNSS calculations. However, because weather is highly localized, tropospheric errors must be modeled and corrected from a relatively close distance to achieve the level of accuracy needed for precise positioning.
5. Group delay (code bias)
Different countries and organizations around the world operate GNSS satellites. While they are generally aligned, minor discrepancies in time references and frequencies exist that can impact the accuracy of GNSS positioning. This is known as group delay or code bias and must also be corrected to ensure that signals are interpreted correctly.
Types of GNSS corrections
Understanding the origin of errors is critical when selecting the optimal GNSS signal correction method for a particular product or application. Each method has advantages and disadvantages ranging in importance depending on the application of GNSS positioning
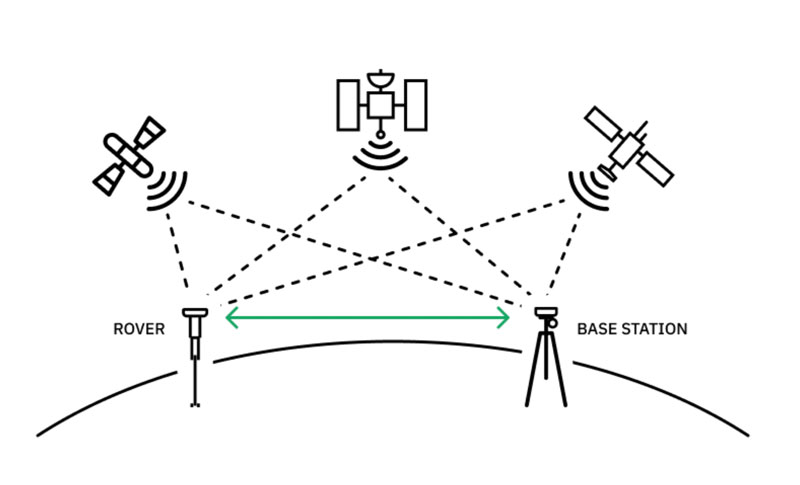
Real-time kinematic positioning (RTK) correction is widely regarded as the best method for achieving precise GNSS signal correction. It requires setting up a base station with a GNSS receiver at a very well surveyed location near the target area (usually within 30-50 kilometers), which transmits corrections to the end user’s GNSS receiver (called the rover). The proximity between the base station and the rover mitigates the impacts of signal errors. Any signal disparities that do exist can be analyzed to measure positional differences between the base and the rover, enabling the latter to calculate its position very precisely.
Real-time kinematic positioning (RTK) yields efficient and highly precise GNSS corrections but requires an extensive network of base stations to support receivers across a large geographic area. (Image: Point One Navigation)
However, classical RTK solutions have a notable limitation: to achieve corrections over wide areas they require an extensive infrastructure of base stations, which can significantly escalate costs. Therefore, RTK is best for autonomous vehicles and consumer navigation and sub-optimal for positioning applications in remote areas.
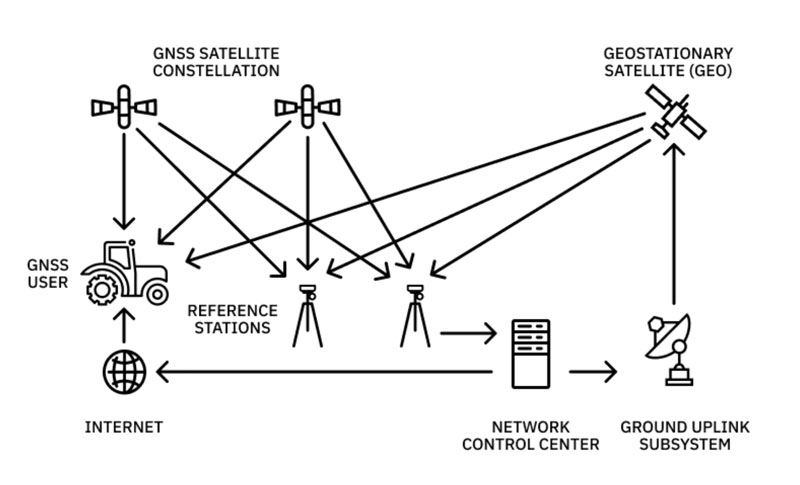
Precise point positioning (PPP) utilizes a limited number of highly precise and accurate stations to correct GNSS signals. The PPP algorithm divides the responsibility for correction between these stations and GNSS receivers. As a first step, the PPP stations model various known sources of error within GNSS, such as ephemeris inaccuracies, clock discrepancies, and group delay. They then transmit this information to GNSS receivers to conduct further calculations based on local conditions and refine the error estimation. By combining the accumulated signal data with the known error sources provided by the PPP stations, GNSS receivers gauge both global and localized errors (including ionospheric and tropospheric effects), ultimately calculating the necessary signal corrections for accurate positioning.
Despite its high accuracy, the limited number of existing PPP stations results in a longer time for signal correction. Using the PPP method, signal correction may take approximately 20-25 minutes. Particularly challenging conditions can further prolong the time needed to correct the signal, as the receiver independently calculates both ionospheric and tropospheric effects.
PPP is best for heavy equipment operating in open water or remote locations and sub-optimal for consumer GNSS receivers and autonomous vehicles.
Precise point positioning (PPP) produces accurate signal corrections, but at a much slower speed than other solutions. (Image: Point One Navigation)
The forefront of GNSS signal correction technology today is state space representation (SSR). In addition to providing ephemeris, clock, and code bias discrepancy data like PPP, SSR offers valuable insights into other signal accuracy factors, even the highly localized interferences caused by the ionosphere and troposphere. Nonetheless, many GNSS receivers lack the capability to effectively process and convert this extensive data into meaningful positions. To address this challenge, SSR data can be transformed into a virtual base station (VBS), effectively simulating an RTK base station for legacy receivers. This bleeding edge method enables the utilization of SSR data even with conventional GNSS receivers, expanding access to high-precision positioning capabilities to more users. SSR is best for the automotive and robotics industries and sub-optimal for teams using generic receivers.
Choosing a GNSS correction method
Like all technology, GNSS correction methods are constantly evolving, making high-precision positioning more accessible and reliable across a wide range of applications. However, to serve the increasing demands of organizations using GNSS for applications requiring precise positioning, correction methods must be scalable, efficient and accurate.
Different methods for correcting GNSS signals offer varying levels of accuracy and suitability for specific applications. As they select which is best suited to their use case, users must prioritize their needs, as well as the benefits and trade-offs of each correction method. RTK produces fast, hyper-accurate results in developed areas but can be expensive to deploy in areas without the proper infrastructure. PPP methodology enables users in remote locations to access precise positioning information but can take a substantial amount of time. SSR is powering some of the most innovative applications in technology today, but is not as accessible as other methods due to the limitations of legacy receivers. Once they have assessed cost, speed and accessibility, developers can select the GNSS correction method that is best for their product or application. As this continued innovation in the GNSS space increasingly helps organizations overcome challenges in signal correction, it will be interesting to see what new cutting-edge technology develops to shape the future of our world.
Septentrio has released the AntaRx-Si3, a GNSS/INS smart antenna housed in an ultra-rugged enclosure, designed for straightforward installation on machinery such as agricultural robots. It combines Septentrio’s centimeter-level GNSS positioning with an inertial measurement unit (IMU) within the same enclosure as the GNSS antenna, which uses FUSE+ technology.
The AntaRx-Si3 is designed for challenging industrial environments where GNSS signals are at risk of obstruction, such as under heavy foliage. The integration of the IMU sensor with FUSE+ technology offers continued position availability accuracy and reliability, which is necessary for autonomous systems’ operations.
The antenna’s exterior is crafted from impact-resistant polycarbonate with an IP69K rating and can withstand significant shocks, vibrations, and harsh environmental conditions.
It uses Septentrio’s GNSS+ algorithms to offer advanced multipath mitigation to operate in environments where satellite signals could be reflected off surrounding machinery or structures, such as silos. The antenna delivers high update rates and low latency positioning, which are crucial for the control loops of autonomous movements or rotations.
A street in Pompeii shows the structures that were remarkably preserved after Mount Vesuvius covered the city in ash in 79 CE. Everything about Porta Nocera, Region I 14 is being digitized by archaeologists. (Image: Allison Emmerson)
At the edge of Pompeii, along a city gate known as the Porta Nocera, professor Allison Emmerson of Tulane University directs a team of archaeologists. The famous Roman city, frozen in time when Mount Vesuvius erupted and covered it with ash, continues to reveal new insights to archaeologists nearly 275 years after the site was first discovered.
Within a building long believed to be a home around 2,000 years ago, the team unearthed a different story — one unraveling traces of economics, urban design, and social life among an elite and a lower class. To tell the story, Emmerson and her team have created a location-aware digital twin of the excavation site, which incorporates 2D maps, smart maps, and 3D models. The team is also able to share live data via a fully digital workflow using iPad Pros and Apple Pencils.
Revolutionary documentation with mobile app workflows
The latest geographic information system (GIS) technology allows Emmerson’s team to digitize everything they unearth at Porta Nocera, Region I Insula 14 as part of the Pompeii I.14 Project run by Tulane.
The team first used UAV imagery, terrestrial photography, and a technique called structure-from-motion photogrammetry to create a base map and 3D base model of the site. They then used tablets loaded with GIS apps to layer data over that 3D base model.
Leading the GIS data collection workflow is professor Alex Elvis Badillo, cohead of the project’s digital data initiatives team. Badillo said the archeologists use GIS documentation on the iPad Pro to record and explore data in layers to avoid information destruction.
Using ArcGIS Survey123, the team can share data on-site and implement paperless workflows. That data can also be linked to digital ArcGIS Dashboards to keep track of progress and foster collaboration during the excavation.
Interpreting the dig site
Emmerson and her team determined that the structure they initially uncovered was used for commercial activity such as shopping and dining, often identified with the lower classes at the time. Meanwhile, an elite residence was located right next door and the two buildings shared resources.
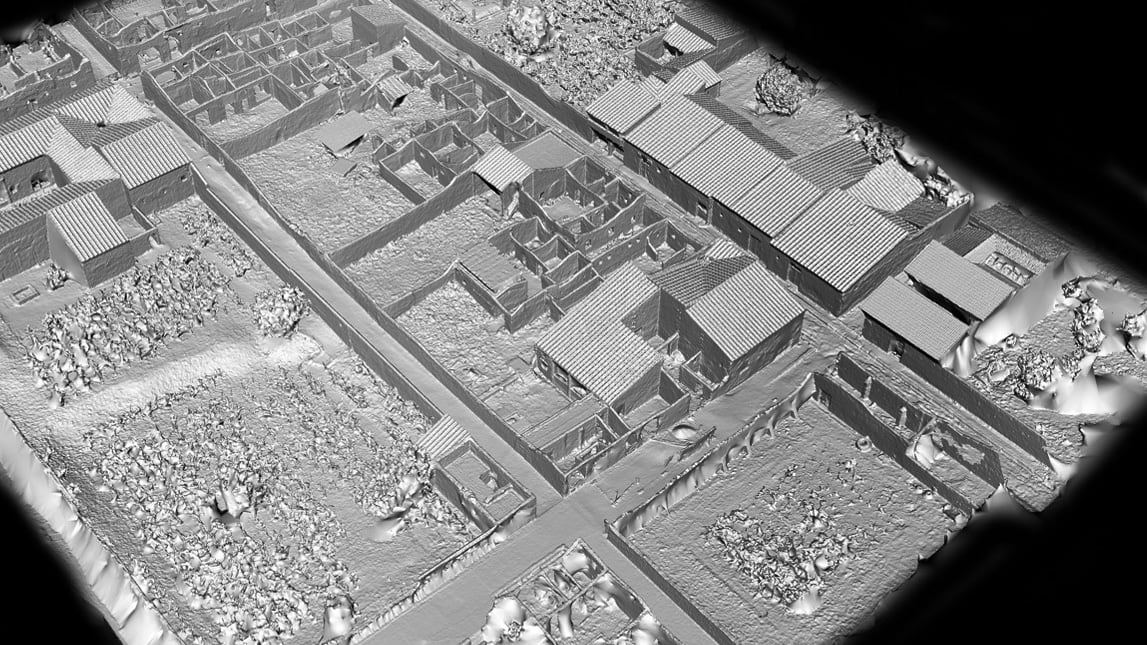
Lidar (light detection and ranging) uses laser light to densely sample the surface of the Pompeii I.14 site, producing highly accurate x,y,z measurements that provide the foundation for the digital twin. (Image: Allison Emmerson)
The Pompeii I.14 Project is ongoing. Once it is complete, the data will be incorporated into a larger digital twin from the Pompeii Bibliography and Mapping Project (2017) led by Eric Poehler, an associate professor of Classics at the University of Massachusetts Amherst. It will also be added to Pompeii’s central archaeology database and be available to policymakers, educators, archaeologists, and the public.
Researchers hope that a new understanding of the economic and social life of an ancient city such as Pompeii can not only inform us about the past but also help us create a better future.
UAV imagery draped over the lidar data provides a photorealistic surrogate of the Pompeii I.14 Project site, which serves as the centerpiece for project data collection. (Image: Allison Emmerson)
ComNav Technology has introduced its new handheld P6H solution. The device is designed for GIS data collection and outdoor operations. Featuring a GNSS high-precision positioning module, rugged IP67-rated design, and 6-inch sunlight-readable display, the P6H offers positioning accuracy even in harsh environments.
Equipped with a SinoGNSS self-developed high-precision K8 board and antenna, it can track all running and planned constellations with 1,590 channels, including GPS, BDS, GLONASS, Galileo, QZAA, IRNSS and SBAS.
The P6H offers users centimeter- or decimeter-level accuracy. Its IP67 rating protects against dust and water to enhance its efficiency and durability in tough environments.
The device comes equipped with Survey Master, boasting robust GIS functions, which allows users to take measurements of geographic elements and store the results as attribute data for subsequent analysis, calculation and visualization. It also includes a mock location function for users to accurately share Survey Master’s position with P6H. The location data can then be accessed on a third-party GIS software.
It is also compatible with common GIS software such as ArcGIS Collector, Mapit GIS and QGIS. Additionally, the P6H features an 8-core 2.0 GHz processor, up to 128 GB of storage and up to 6 GB of RAM to offer users smooth software operation and efficient data processing.
The handheld device, featuring a high-precision GNSS module and antenna, also incorporates 4G LTE, Wi-Fi and Bluetooth to improve its data transmission and sharing capabilities.
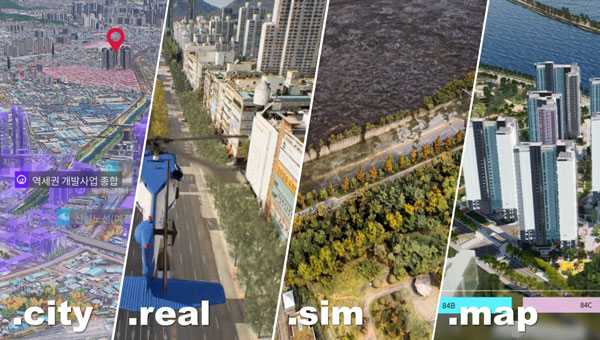
Techtree Innovation has launched AROUND, a high-precision, high-resolution 3D geospatial map platform designed to improve the quality and accuracy of existing 3D maps.
According to the company, AROUND is based on its existing 3D map generation and rendering technology. It offers four solutions for various industrial applications, such as urban or smart city planning, simulation, military and disaster management.
AROUND intends to provide high-precision, high-resolution 3D geospatial maps rendered with satellite maps, GIS data, 3D scanning using the photogrammetry software mapping (PSM) method, and high-end graphic production technology using the Unreal Engine, a 3D rendering platform.
The mapping platform aims to increase realism by implementing various visual geospatial information data — including terrain, buildings, vegetation, roads, transmission towers, traffic lights, signs and signboards, weather conditions, sunlight, coordinate data, elevation differences, and more from the real world. It is characterized by having accuracy and resolution within 5 cm and unifying all high and low altitude resolutions.
AROUND can be used for digital twins, smart city construction, autonomous driving, aviation, military training and education, disaster prediction, smart city or urban planning, review, architecture, design and more.
Image: Techtree
The platform offers four geospatial 3D map solutions tailored to users’ individual needs:
AROUND.city
AROUND.city is a solution that simulates the construction and development of urban areas or buildings. Through city simulation, 3D visualization, and data, AROUND.city can be used for analysis of various environments such as commercial, cultural, and residential facilities, and for space, environment, planning, design, and landscaping. The platform is designed to aid in the establishment and exploration of alternative plans, progress of development and evaluation in urban planning.
AROUND.real
AROUND.real provides high-quality 3D visualization mapping data with all collisions and blocks placed, which can be used in simulators of aircraft such as urban air mobility (UAM), helicopters, airplanes, autonomous cars, and various transportation means based on the development platform.
Using digital twins, AROUND.real allows for safe testing in risky real boarding and training areas. It also implements a variety of accurate and detailed visual-spatial information data, such as real terrain and buildings, grass, roads, utility poles, traffic lights, signs and signboards, weather conditions, and sunlight.
Around.sim
AROUND.sim visualizes refined data on various environmental factors such as building wind, flood, and population density in a specific area using the high-precision, real-world terrain and structures provided by the AROUND platform. Through this, users can predict problems about complex future situations in the same environment as reality, derive insights, or propose solutions.
AROUND.map
AROUND.map is a 3D real-estate marketing solution that already has commercialization achievements in the construction and allotment market. It visually represents the vision and buildings of the future that do not exist at the time of pre-sale, addressing the disadvantages of the existing pre-sale market, and implements all visual expressions such as virtual tours of all surrounding locations and pre-sale complexes, traffic, development plans, development benefits, view rights, and sunlight rights, just like reality.
Septentrio has launched the AntaRx smart antenna designed for machine automation and control in construction, precision agriculture and logistics.
The smart antenna is enclosed in a rugged and compact housing for simplified installation. It can handle high levels of shocks and vibrations which makes it ideal for harsh industrial environments such as construction and mining.
The multi-frequency receiver offers centimeter-level real-time kinematic (RTK) positioning and can be used in inertial navigation system (INS) integration, dual antenna mode and 4G cellular communication. It is available in several configurations, including as a GNSS smart antenna or a GNSS/INS smart antenna system and can be integrated as an inertial measurement unit (IMU).
AntaRx is the latest addition to Septentrio’s machine control GNSS receiver portfolio. The receiver technology integrates the company’s GNSS+ algorithms, including advanced multipath mitigation, which offers uninterrupted operation in challenging conditions such as near high structures or machinery.
A roundup of recent products in the GNSS and inertial positioning industry from the December 2023 issue of GPS World magazine.
SURVEYING AND MAPPING
Survey Antenna Designed for high-accuracy positioning applications
HX-CSX600A boasts a pre-filtered low noise amplifier (LNA) offering out-of-band rejection, ensuring strong anti-interference performance even in challenging environments. It is designed for high-precision GNSS applications, including agricultural vehicles, small robots and surveying. The antenna offers reliable and consistent satellite signal tracking across a wide range of frequency bands, including GPS, GLONASS, Galileo, BeiDou, QZSS, IRNSS, SBAS, as well as L-band correction services. With advanced multipoint feeding technology, HX-CSX600A maintains a stable phase center variation. Built with an IP67-rated compact and ruggedized housing, this antenna is designed to withstand dust, rain, sunlight, shock and vibration. Its standard TNC-K connector and pole mount aim to simplify the integration process. Harxon, harxon.com
Image: SBG Systems
INS/GNSS Post-Processing Software Designed for surveying applications
The Qinertia 4 introduces several features that provide users with a complete solution for precise trajectory and motion analysis. Qinertia is a post-processing software delivering better precision and reliability compared to real-time kinematic systems. It has an enhanced geodesy engine that boasts an extensive selection of preconfigured coordinate reference systems (CRS) and transformations, making it a versatile solution in applications that use diverse geodetic data, including land surveying, hydrography, airborne surveys, construction and more. To tackle the challenges of variable ionospheric activity, the technology uses Ionoshield PPK mode. This feature compensates for ionospheric conditions and baseline distances, allowing users to perform post-processing kinematics (PPK) even for long baselines or harsh ionospheric conditions. Another addition to Qinertia 4 is extended continuously operating reference stations (CORS) network support. This feature offers users a vast network of 5,000 SmartNet stations for reliable GNSS data processing.
Qinertia has more than 10,000 bases in 164 countries. This global coverage ensures Qinertia remains a reliable and efficient solution, regardless of geographic location. In addition, users can import their own base station data and verify its position integrity with precise point positioning (PPP). For data that cannot be processed using PPK, Qinertia 4 offers an alternative solution with its new tightly-coupled PPP algorithm. This new processing mode, available for all users with active Qinertia maintenance, provides post-processing anywhere in the world without a base station, with a horizontal accuracy of 4cm and a vertical accuracy of 8cm. SBG Systems, sbg-systems.com
IMU-RTK GNSS Receiver A compact, high-performance receiver with high-end dual camera technology
The i89 visual inertial measurement unit (IMU) GNSS receiver is a surveying device equipped with a 1,408-channel GNSS module that enhances real-time kinematic (RTK) availability, even in challenging environments. Its iStar 2.0 software incorporates advanced ionospheric modeling algorithms, achieving a high integrity RTK fix rate, particularly critical in regions of intense solar activity. The implementation of AUTO-IMU technology eliminates the need for manual initialization, streamlining field operations for increased efficiency. The i89 offers 16.5 hours of battery life and a lightweight 750 g design. The combination of panoramic capture mode and integrated IMU significantly improves the accuracy and efficiency of photogrammetric surveys. CHC Navigation, chcnav.com
GNSS System Features visual positioning capabilities
The Trion V10i GNSS System integrates two cameras for vision-guided surveying operations, an inertial measurement unit (IMU) for tilt surveys and an OLED screen for easy status checks. This device is designed to enhance productivity in the field, even in hard-to-access locations. It features IMU-based tilt compensation for precise measurements of up to 60° with no calibration needed. It also comes with a built-in 4G LTE and UHF and supports NFC, Wi-Fi and Bluetooth. It also offers users seamless connectivity through Trion Survey Cloud for real-time data sharing between field and office teams. FJDynamics, fjdynamics.com
INS For mobile mapping applications
The Atlans 3 is an inertial navigation system (INS) designed for land and air mobile mapping applications. The device is an all-in-one positioning and orientation system integrating unique micro-electro-mechanical systems. MEMS-FOG hybrid technology and a dual-antenna real-time kinematic GNSS receiver are housed within one compact device. The Atlans 3 offers north-keeping capability at FOG-level performance across a variety of land and air mobile mapping applications. It delivers real-time heading, even in GNSS-challenging environments such as urban canyons, mountainous terrain, or forested areas. The lightweight INS is designed to meet the requirements of high-performance lidars mounted on vehicles where space and weight constraints are critical. The Atlans 3 is designed to be quick and simple to install on all platforms. It offers efficient “set-and-forget” operations for a wide range of land and air applications including road and rail asset inventory, pavement condition survey, vehicle automation, HD mapping, ground-truth, airborne surveys and precision pointing. Exail, exail.com
L-Band GNSS Antennas Available in four models
The ARM972XF triple-band plus L-band GNSS antennas provide GPS/QZSS L1/L2/L5, GLONASS-G1/G2/G3, Galileo E1/E5a/E5b, and BeiDou B1/B2a/B2b + L-band coverage. The technology is designed for precision triple-frequency positioning where light weight and a low profile are required. The ARM972XF are small and lightweight housed triple-band precision mini ARINC GNSS antennas. They have an average phase center variation of less than 10 mm for all frequencies and overall azimuths and elevation angles. Additionally, both models are available with components qualified for low-Earth orbit (LEO). Housed in a weatherproof (IP67) enclosure, the ARM972XF is available in four versions. Model ARM972XF-1 (ARM972XF-1-S for LEO space-qualified components) has an integrated 100 mm ground plane, while model ARM972XF-2 (ARM972XF-2-S for LEO space-qualified components) is 83 mm in diameter. The antennas also include Tallysman’s eXtended filtering (XF) technology, designed to mitigate GNSS interference. Tallysman Wireless, tallysman.com
UAV
Helix Antenna Designed for UAVs
The HX-CUX615A has a low-profile design and simple integration process that makes it a suitable antenna for various UAV applications such as aerial photography, remote sensing, infrastructure inspection, traffic control and public security. Equipped with a pre-filtered LNA, HX-CUX615A offers out-of-band interference rejection to mitigate unwanted electromagnetic interference and provide reliable GNSS signals for seamless integration into positioning solutions. This lightweight antenna also adopts patented dual-quadrifilar helix antenna technology, ensuring stable wide-angle circular polarization performance. This results in low-elevation satellite tracking, while maintaining high gain and reliable signal tracking — even in challenging environments. Harxon, harxon.com
VToL UAV A fully autonomous fixed-wing VTOL UAV with multiple power configurations and a heavier payload
The E455 is a fixed wing, vertical takeoff and landing (VTOL) UAV. At 55lbs, the E455 offers a 2-hour flight endurance operating on battery power alone. It is designed to carry a variety of payloads, including mapping sensors, lidar and EO/IR surveillance sensors. Where allowed, the E455 can fly at gross weights up to 65 lbs, which offers users more versatility in payload selection. The E455 also features an open control payload bay, which allows for the seamless integration of custom payloads.
EVENT 38, event38.com
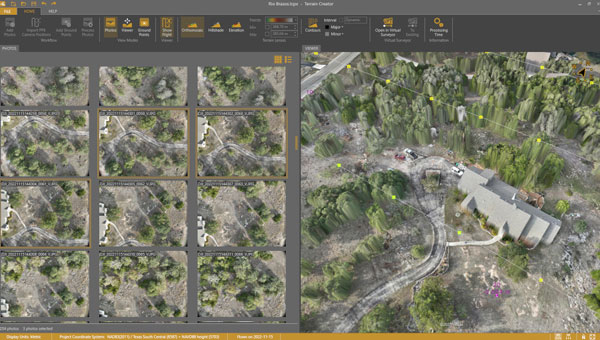
UAV Surveying Software With added UAV photogrammetry capabilities
The Terrain Creator app photogrammetrically processes UAV images to generate survey-grade terrains that then transfer into the traditional Virtual Surveyor workspace. Terrain Creator aims to simplify the aerial photogrammetry process by offering a visual and intuitive application to produce an orthomosaic and a digital surface model (DSM) from UAV photos, the company said. The software was originally developed to bridge the gap between UAV photogrammetric processing applications and engineering design packages. Prior to this new release, users had to rely on third-party software to generate elevation models and an orthomosaic on which they could work with the Virtual Surveyor toolset. Now, users can derive the 3D topographic information necessary for construction, surface mining and excavation projects in one package. Once the survey-grade terrains flow from the Terrain Creator into the Virtual Surveyor desktop app, users can access an interactive virtual environment and robust toolsets to generate CAD models, create cut-and-fill maps and calculations, or calculate volume reports. Users currently subscribed to Virtual Surveyor Ridge and Peak editions will see their software updated automatically with Terrain Creator. A flexible licensing setup will allow two users within a subscribing organization to use the Terrain Creator and Virtual Surveyor applications simultaneously from different computers. Virtual Surveyor, virtual-surveyor.com
MOBILE
Antenna Designed for high-precision and autonomous multi-frequency applications
The M10HCT-TNC GNSS L1/L2/L5 antenna is ground-plane independent and offers extremely low power consumption and minimal phase-center variation over azimuth crafted for GNSS high-precision applications. The antenna offers suitable axial ratio, ensuring multipath error is mitigated. Several filtering groups allow this antenna to have superb filtering capabilities and RF antijamming mitigation capabilities.
Maxtena, maxtena.com
GNSS Receiver Suitable for personnel positioning, IoT, railway patrols, vehicle tracking, and search and rescue missions
Equipped with the SinoGNSS K8 platform, the Z30 can track full constellations and multiple frequencies, providing centimeter-level accuracy. With 965 channels, it is capable of tracking more than 60 GPS, BeiDou, GLONASS, Galileo, QZSS, IRNSS and SBAS satellites. The Z30 features an integrated antenna for stable signal reception. The device is also equipped with two side buttons for power, one-click SOS alerts and three Indicator LEDs for power, satellite, and differential status checks. It supports NTRIP and TCP protocols, enabling various personnel positioning applications by uploading position data. The Z30 integrates with NaviCloud, offering functions such as real time location display, historical trajectory query, remote control, and electric fence. In addition, it can be customized to meet specific customer requirements. With indoor and outdoor positioning capabilities, the Z30 is a suitable solution for various fields. It supports outdoor real-time kinematic positioning with centimeter-level accuracy and indoor Bluetooth positioning with sub-meter-level accuracy. ComNav Technology, comnavtech.com
Antennas IoT multiband antennas designed for multiple mobile applications
The Pasternack IoT multiband combination antennas are designed for vehicles, fleets and pivotal base stations. The technology aims to revolutionize how industries perceive and use mobile connectivity. The antennas integrate 4G, 5G, Wi-Fi and GPS bands to offer emergency teams, on-the-move fleets and first responders an unwavering link, even in harsh environments. Facilitated with both FAKRA and SMA connectors and extended 17-foot cable leads, users can seamlessly integrate the technology. It also has an IP69K rating, certifying it for both indoor and outdoor deployments. MIMO capabilities improve data transmission speeds and reliability, ensuring consistent high-bandwidth connections. The antenna’s GPS/GNSS component, enhanced with LNA and amplified by a 26 dB gain, offers users improved navigation and tracking precision. Pasternack, pasternack.com
Antenova, a UK-based manufacturer of IoT (Internet of Things) antennas and GNSS modules, has released the Admotus antenna, the latest addition to its product line of ceramic antennas.
The Admotus is a surface-mount ceramic antenna designed for connectivity on L1 GNSS signals on all constellations, including GPS-L1 at 1575.42 MHz; GLONASS L1, 1602MHz; Galileo L1, 1575.42 MHz; BeiDou (B1); and QZSS. The compact antenna offers comparable performance to a small patch antenna on a small ground plane.
The ceramic antenna has an ultra-low profile measuring a mere 1.0 x 0.5 x 0.5mm, requires 7.0 x 15mm clearance area and offers improved performance on small PCB sizes.
It offers a peak gain of 0.9dBi with an average gain of –2.6dB and offers maximum return loss of –11.5dB and a maximum VSWR 1.8:1. A companion evaluation PCB is also available for internal analysis.
The Admotus ceramic antenna is suitable for all GNSS positioning applications in the L1 band (1559 – 1609 MHz) such as wearable devices for fitness and medical monitoring, small portable tracking devices used to track keys, pets, bikes, UAVs, agricultural robotics and telematics devices.
SiTime Corporation, a precision and timing company, has released its Endura Epoch Platform. The platform is designed to provide robust and resilient positioning, navigation and timing (PNT) services critical in defense operations.
The MEMS oven-controlled oscillator (OCXO) can boost the resilience of PNT systems and other equipment, including radars, field and airborne radios, satcom terminals and avionics against spoofing, jamming and other disruptions in GPS signals.
Building off of the Epoch Platform launched in September 2023, the Endura Epoch MEMS OCXOs are designed to meet the challenging shock and vibration conditions found in aerospace and defense. These devices are manufactured using proven semiconductor processes that deliver the reliability and quality expected from silicon devices that cannot be achieved by quartz crystal OCXOs, especially in extreme conditions.
The Endura Epoch Platform MEMS OCXO greatly simplifies timing system design due to superior performance and delivers a significant improvement in size, weight and power (SWaP).Key features and benefits compared to quartz crystal OCXOs include:
Programmable frequencies from 10 to 220 MHz
Rated at 20,000 g shock survivability
Up to 20 times better frequency stability over temperature
Up to 3 times better Allan deviation, a measure of short-term frequency stability
Surface-mountable, small footprint and low height 9.0 mm x 7.0 mm x 3.6 mm
Qualcomm Technologies will now support India’s Navigation and Indian Constellation (NavIC) recently launched L1 signals in select chipset platforms.
The company, which is working with the Indian Space Research Organization (ISRO), said the collaboration will accelerate the adoption of NavIC and enhance geolocation capabilities for use in mobile, automotive and IoT applications.
Qualcomm will offer a solution based on its Location Suite, which supports as many as seven satellite constellations simultaneously. These include all of NavIC’s L1 and L5 signals for location, faster time-to-first fix position collection and location-based service, the company said.
Additional support for the NavIC L1 signals will be available in select chipset platforms starting in the second half of 2024, the company said. However, the company said that commercial devices that support NavIC L1 signals will not be available until the first half of 2025.
The company plans to demonstrate its support for the NavIC L1 signals in the Snapdragon mobile platforms at its Qualcomm Innovation Forum event in December 2023.