In the mass market, individuals around the world are creating vast quantities of location data and GPS traces using not only GPS, but also Russia’s GLONASS, Europe’s Galileo, China’s Compass, and India’s Regional Navigational Satellite System. The value of this data and the value chains that produce it will increase significantly with an increase in interoperability of these satnav systems. Currently, non-interoperability represents a serious obstacle to the growth of the GPS market.
The overall system-of-system’s diversity of data formats, data models, processing models and associated custom- built one-to-one communication interfaces significantly inhibits introduction of new subsystems and also new GPS-dependent systems that would support development of future classes of stakeholders. “Many-to-many” networks based on open standards can create interoperability as well as opportunities for the introduction of new technologies, value-added data products, and new users.
To address this problem, sponsors of the 2012 Open Geospatial Consortium (OGC) OWS-9 Interoperability Testbed, including the U.S. National Geospatial-Intelligence Agency (NGA), documented a set of use cases and associated interoperability requirements, selected strategically to address problems whose solutions would be applicable in a wide variety of GPS value chains.
Technology providers participating in the testbed then implemented standards-based solutions that addressed the requirements. These were documented in a draft Engineering Report, “Use of SWE Common and SensorML for GPS Messaging.” The document focuses on the use of the OGC Sensor Web Enablement (SWE) Common Data 2.0 encodings to support an interoperable messaging description and encoding for the next-generation GPS message streams into and out of processing services that provide improved GPS navigation accuracy.
Standards. The OGC Sensor Web Enablement (SWE) suite of standards specifies models and XML encodings that provide a framework within which the geometric, dynamic, and observational characteristics of all types of sensors and sensor systems can be defined.
Furthermore, through standard web-service interfaces, one can task sensor and actuator systems and have immediate access to observations and alerts. SWE standards, now widely implemented around the world, enable developers to make all types of networked sensors, transducers, and sensor data repositories discoverable, accessible, and usable via the Web or other networks. OGC standards are downloadable at no charge, for use by anyone.
OGC Testbed
The OGC OWS-9 testbed’s OWS Innovations thread included a hands-on prototyping activity that addressed a particular set of interoperability requirements related to GPS accuracy.
GPS relies on accurate knowledge regarding the position, measured time, and state of the satellites, provided to GPS devices and processing centers in the form of satellite ephemeris data and status reports. The accuracy of the system relies on communication between the satellites themselves, the data collection systems, the data processing centers, and the GPS devices that ultimately determine their own location. This communication is through various data streams that consist of predefined message structures and encodings.
The accuracy of the positions derived from GPS can be negatively affected by several well-known factors. Improvements to the derived positions within the current operational system can occur (1) through occasional (once a day or once every few hours) updates to the satellites’ clock and ephemeris on-board information, or (2) through post- processing for applications such as geodetic surveying or image processing and georectification. Efforts are underway to provide more timely updates to satellites or positioning devices to improve the accuracy of positioning in real-time.
The GPS Correction Process
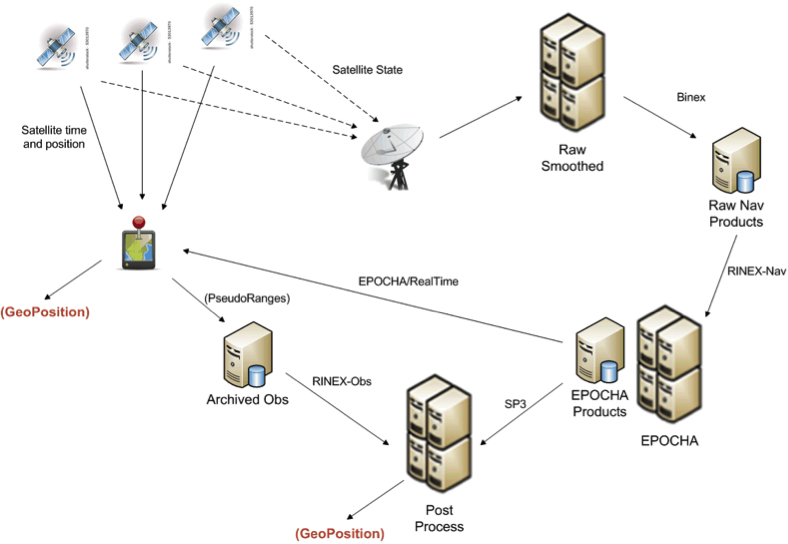
One view of the current system for correcting GPS positioning is provided in Figure 1. A GPS positioning unit (shown as a device with red thumb tack) receives signals from four or more GPS satellites derives its position. In addition, the information being sent by all satellites in the GPS system is also received at various receiving stations, stored as raw navigation data, and used to correct the clock and position information for all of the satellites. The correction process can utilize one or more operational processing systems for correcting satellite clock and ephemeris information. Each of these systems tends to utilize particular data sources and often output their results in different message structures and encodings.
FIGURE 1. Typical flow of data within the GPS correction system.
One such system for correcting the timing and positioning of GPS satellites is Estimation and Prediction of Orbits and Clocks to High Accuracy (EPOCHA). Currently, navigation and timing improvements are only uploaded to the satellites and GPS devices once a day. To improve the EPOCHA system, the National Geospatial Intelligence Agency (NGA) is researching the logistics and benefits of updating the navigation and timing information at much shorter time frames (for example, every 2–15 minutes).
The corrected satellite clock and state data can then be sent to the satellites, to the processing centers to improve geolocation of real-time or archived positions or remotely sensed observations, and to devices in the field to improve real-time position measurements.
A processing system in widespread use for applying these corrections to positional measurements is the open-source GPS Toolkit (GPSTk). This software was used in OWS-9 to demonstrate the processing of SWE Common encoded GPS data within a Web-enabled environment.
As shown in Figure 1, the data flowing between archiving and processing components exist in a wide variety of formats. Currently, these message streams consist of message structures defined through various documents, some of which have restricted access. Additionally, these streams and the messages they contain are being encoded in various formats, including, for example, a binary exchange format (BINEX), a system-specific XML schema, an HDF5 file format, several text-based formats, and others.
The message components within each of these formats are inconsistent, even though two messages may describe similar information. Often a processing system is required to read data and output results in multiple formats and to understand the inconsistencies between them.
By forcing different software and processing systems to support multiple message structures and data formats, the current system inhibits the effective use of these data by:
requiring several format-specific readers and writers to be developed in the appropriate software language (C, C++, Java, Python) as required by each application system;
providing inconsistent message structures between the data used or produced by different processing systems;
requiring meticulous and thus error-prone human interpretation of the data components based on the limited documentation provided for each;
creating lack of interoperability with regard to using data designed for or produced by a different particular processing system; and
discouraging development of new and innovative software and processing solutions.
The Engineering Report addresses the feasibility of using the OGC SWE Common Data v2.0 standard to support all message and data streams within future generations of the GPS operational network. In particular, the effort focuses on message streams that provide input to and output from the processing systems responsible for providing improved position and time accuracy within the GPS network.
Here are the benefits of the SWE Common Data standard:
The data can be fully described in a machine- and human- readable XML document providing: data type, units, constraints, semantics, quality, labels, and so on; and an unambiguous definition of both the data structure and encoding of messages/records.
The data values themselves can be encoded in highly efficient binary or ASCII text blocks or streams.
A single software application is able to read any data described in SWE Common data.
Any process can be described in SensorML using SWE Common as inputs, outputs, and parameters.
Any SensorML-defined process can participate in easily-defined executable workflows.
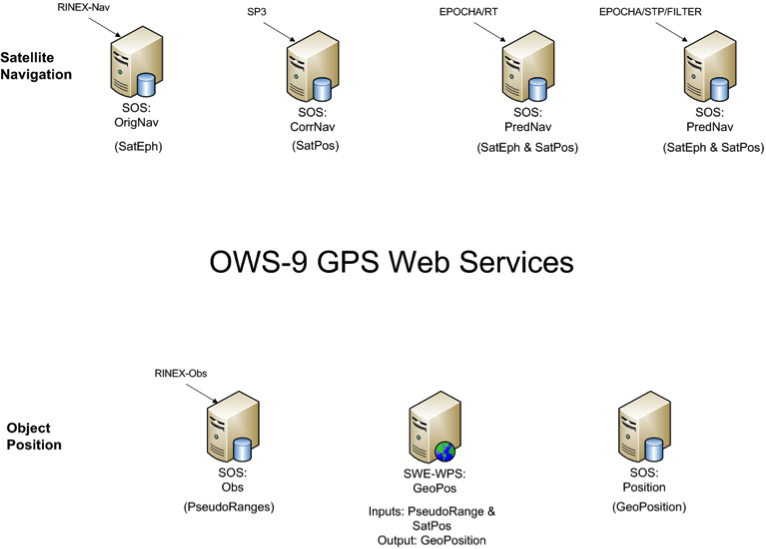
The Engineering Report describes the formats and how they were encoded, and the Web services created to move data between various GPS processing systems (FIGURE 2).
FIGURE 2. Collection of SWE services providing on-demand access to all GPS-related data in the project.
Conclusions
A common standards framework for all data files and streams within the GPS system would significantly improve interoperability between data centers, processing centers, and user tools.
In addition to a common encoding, common models for equivalent message or data records would also be important for interoperability among data, processing centers, and the tools. Common models and a common data framework enable rapid reconfiguration of workflows using different GPS processing products. Likewise, the availability of a common Web service interface enables one to rapidly and flexibly request specific data products and feed them into an executable workflow.
Here are further benefits:
SWE Common Data framework is fully self-described and machine readable.
Common models for all data would support “mix-and-match” capabilities within the processing workflows.
SWE Web services enable on-demand access to various GPS data products using a common framework.
SWE Common Data enables use of SensorML for readily defining and executing various workflows on demand.
Future Directions
Further research and development should move closer to a highly interoperable GNSS system that meets the needs of a broader community of users and enables the development of new supporting software by outside communities. Thus the following are recommended:
Design and reach consensus on consistent data models for all message types in navigation, observation, and state data streams.
Incorporate SWE Common Data readers/writers in the GPSTk toolkit.
Create SensorML descriptions for GPSTk apps.
Demonstrate on-demand design and execution of SensorML-defined workflows for GPS correction.
Demonstrate on-demand geolocation of UAV, ground-vehicle, and hand- held sensors using SWE services and encodings.
Some of these needs will be addressed in the OWS-10 Testbed that is currently ramping up in the OGC.
MIKE BOTTS is president and CTO of Botts Innovative Research, Inc, specializing in the design and application of open standards for sensor systems. He is the creator and chief architect of Sensor Model Language (SensorML), an OGC technical standard for describing the measurement and processing of observations from virtually any sensor system.
This month’s column is a short one since I’m attending GEOINT 2013* in Tampa. The asterisk on 2013 is a way for USGIF to save a few bucks by not reprinting banners, displays and handouts for the 2014 date. In talking to the USGIF staff, I learned this will be the only symposium for the year, with the next GEOINT Symposium being held in the spring of 2015. The location will be announced soon.
For your information, this is the latest list of keynote speakers:
The Honorable James R. Clapper, Director of National Intelligence (DNI)
LTG Michael T. Flynn, U.S. Army, Director, Defense Intelligence Agency (DIA)
Ms. Letitia A. Long, Director, National Geospatial-Intelligence Agency (NGA)
ADM William H. McRaven, U.S. Navy, Commander, U.S. Special Operations Command (USSOCOM)
Ms. Betty J. Sapp, Director, National Reconnaissance Office (NRO)
Mr. Robert Scoble & Mr. Shel Israel, Co-Authors, “Age of Context”
While attending next week, I’m going to shoot video clips and write blogs that will be posted to this publication. If you’re attending GEOINT and see me (bald head, easy to spot), please stop me and say hello.
If you won’t be able to attend and need eyes on a particular presentation or exhibitor, please contact me. I’ll try my best to sit in on the session and take notes, or visit an exhibitor’s booth to get the information you need. I may shoot a video clip, or at least give you my impression of the session or booth.
Not so long ago, we occasionally speculated on the order of GNSS preference for both manufacturers and end users. GPS first, of course. Only the most radical of future visions saw anything different. But after that? GLONASS, Galileo, BeiDou — or switch them around? A case could be made for almost any sequence, by virtue of active constellation size or geometry, code structure, interoperability, government funding, or national economies.
It was once felt that a maximum of two GNSS could be made to fit cost-beneficially on a chip destined for mass-market devices; professional OEM boards had, of course, far more leeway and budget. Then engineering ingenuity found space for three on a chip.
A wag noted during that timeframe that in GNSS as in the Olympics, one can win gold, silver, or bronze. There is no prize for fourth place.
Lately, however, it seems there may be room for all. Our feature article this month affirms that “the silicon manufacturer must continue the path towards the fully flexible multi-constellation mass-market receiver.”
Nevertheless, choices will be made in design and manufacturing: different choices by different manufacturers in different regions, on different products. I now think that market size and connectivity will be the strongest drivers for selection of GNSS in product design. Constellations, at least in their order of establishment, almost don’t matter. Government mandates to use the respective national (or regional) GNSS in official or officially linked applications will add to the weight of market size.
These government-mandated applications encompass air, rail, and maritime navigation and management, survey and construction, road tolling, and road-user charging, just to start with. With emergency calling, it’s not hard to envision such mandates extending to telecomm as well, the most plentiful in end-user devices.
In that light, consider the words of political scientist John McCormick from his book Why Europe Matters.
“The European Union has a population of more than half a billion. It is the wealthiest marketplace in the world, is the biggest trading power in the world, is the biggest source of (and magnet for) foreign direct investment, and has shown that it is possible to wield influence without relying on military power.”
Even should Galileo finish fourth in the race to establish a full constellation, smart money may put Galileo on every future GNSS chip, high precision or mass market.
This month I am writing to you from Munich, where I have just attended the Munich Satellite Navigation Conference. I have written up the full Summit proceedings for GPS World’s new European GNSS & Earth Obersvation Report (EAGER) newsletter. You can read that (much longer) column here and while you’re at it, sign up for the new quarterly newsletter. What follows is an excerpt of it, specially focused on professional GNSS OEM interests.
I used to spend quite a lot of time in Munich working on a multi-national, multi-role fighter aircraft program, so returning for this year’s Munich Satellite Navigation Summit stirred some good memories for me. Held in the opulent Residenz Muenchen March 25-27, the conference always has a special atmosphere that these historic 1385 surroundings convey to the attendees.
Munich is in the Southern German state of Bavaria, and Bavaria has taken a real interest in the promotion and success of Galileo; witness the extensive Bavarian booth at recent European and North American GNSS conferences. Germany has, of course, been one of the principle nations providing significant funding for Galileo from its inception.
So with this backdrop, the summit brings together people involved with GNSS from around the world to report on the current status of GNSS and to relate how their participation in satellite navigation has progressed. And, of course, Europe, Germany, Bavaria and the European GNSS industry, which is now recognized around the world, all take the opportunity to present their capabilities and successes.
The first day’s session contained constellation updates from GPS, Galileo, Beidou and the UN International Committee on GNSS (ICG) — GLONASS delegates were notably absent. There was much speculation that they declined to attend due to the Crimean situation, and one U.S. delegate even inferred that they were “uninvited.” For the constellation updates, see the longer article referenced above.
Munich Highlights
A collection of examples of Bavarian GNSS innovations followed in a very interesting session led off by an overview of Business Incubation Centers and their collaboration with government agencies and research centers. Small business start-ups are apparently encouraged to apply during four annual time-slots, and receive two years’ incubation support and cash incentives. This has lead to 81 new ventures and has apparently been the source of the 1,000 new jobs mentioned by the Minister of Economic Affairs. The annual European Satellite Navigation Competition and Galileo Masters competition have also generated a whole bunch of ideas and concepts (8,000), some of which have found support through this incubation process.
Airbus Defence gave a short overview of the testing work it accomplished in supporting the first Galileo fix and has prepared several vehicle test platforms, ready to take the next phase of Galileo testing to the streets in realistic, real-world environments.
DLR provided insights into a number of its activities, namely:
Iono mapping
Signal distortion
Multipath
Jammer mitigation – adaptive antenna and processing
GNSS repeaters – how they can become unintentional jammers
Spoofer and Multipath inbvestigations
Antenna designs
GNSS evolution – Maser and clock combination benefits
Army University of Munich discussed radio science experiments in the Solar System and experiments using Mars Express (above) in polar orbit around Mars and resulting measurements of the moon Phobos. Internal and external outreach efforts with numerous organizations were also mentioned.
IFEN provided more down-to-Earth information on the on-going activities at the GATE ground-based pseudolite range, which has enabled realistic outdoors testing of Galileo receivers, well in advance of signals from orbiting satellites. Recent testing has now been able to include the four operating Galileo SVs on orbit with GATE pseudolite signals. GATE will continue to evolve over the next few years to keep up as more Galileo orbital signals come on-line.
Fraunhofer presented information on its 40-channel GPS/Galileo/GLONASS chip-receiver (above) – claiming 1-meter accuracy, low-cost, robust reliable position solution, small form-factor and low-power. Following PRS test-bed development efforts, Fraunhofer has now received a contract to also deliver 20 pre-operational Galileo PRS receivers for use in initial pilot projects.
GNSS Interference
Vidal Ashkenazi, in his inimitable form, lead a panel discussion on interference, jamming (in particular Personal Privacy Devices, or PPD) and spoofing, and coaxed his panel members to provide a whole bunch of information on what’s being done, mitigation capabilities and potential enforcement. Unlike all the other sessions, Vidal’s panel members didn’t use presentations, but rather responded to wide-ranging questions on the subject from the session chair. For a complete view of this, as well as a subsequent session on “Legal Impacts of Personal Privacy Devices (PPDs),” see the EAGER newsletter column.
Precise Point Positioning (PPP)
The group discussing PPP options consisted of the the European GNSS Agency (GSA, charged with exploitation of Galileo services), several principle industry service providers of PPP, and the federal agency, which provides PPP-like services in Germany.
The GSA presented its ideas concerning the provision of high-accuracy PPP corrections over the Galileo E6 signal – the so-called Commercial Service (CS). The intent, however, would not be to disrupt the commercial marketplace. Nevertheless, GSA is proposing a public-funded service to be sold to users within a market that is already well served by commercial worldwide service providers who charge users for cm-level PPP service.
And while Trimble made a polite presentation on the many levels of capabilities of its TerraSat services, as did Veripos and to some extent Fugro, it was clear that the commercial providers are not eager to find competition in their market from a government entity. NovAtel also chimed in on this conflict as it will be involved in Veripos/TerraStar, following its acquisition by Hexagon. Fugro appeared to be interested in acquiring rights to distribute CS on behalf of GSA.
The German federal agency promoted open data, source and standards from the IGS network to which it contributes: IGS is supported by numerous national agencies around the world. Orbit and clock PPP service is available 24/7 from multiple sources. However, the service is offered on a best efforts basis without a service guarantee, and cannot achieve the accuracies or convergence times of commercial services.
I talked subsequently with Michael Ritter, CEO of NovAtel, to learn the background to the Veripos/TerraStar acquisition. It’s clear that providing PPP services means added value to NovAtel when they sell receivers with PPP capability, so they will quickly discontinue offering Omnistar subscriptions and will shortly launch NovAtel Correct, offering Veripos (marine) and TerraStar (land) PPP subscription services. NovAtel is making significant inroads in the agriculture segment, and they see PPP service as an essential element of this and other businesses. The acquisition was worth something on the order of $200 million, so there is a vested interest in making these services pay and discouraging GSA entry into this market. Veripos will continue supplying other GNSS OEM receiver manufacturers — notably Septentrio, who use TerraStar services, now also NovAtel, and potentially another major GNSS manufacturer.
Future of GNSS in User Segment
Chaired by Greg Turetzky of Intel, this session opened the third day of the Summit. The presenters offered their concepts for current and future GNSS equipment and systems.
Stanford University outlined its work with FAA on an alternate PNT system to be used as a back-up to GNSS. It used to be that GNSS systems were designed to overcome space-weather effects and faults in equipment design or manufacture — nowadays, there are “bad guys” out there and we need to “protect, toughen and augment” these systems. Antennas can be built that impart a specific signature to the signals they transmit, and this may aid in finding and prosecuting the bad guys, but the main focus of work is development of a hybrid system using Distance Measuring Equipment (DME) and a pseudolite.
Tests have demonstrated good performance, and these prototype efforts could lead to aviation requirements (MOPS) development by 2018 and deployment by 2020.
Septentrio has been involved in Galileo since it began and was the first company with Galileo receivers. Nowadays, they have receivers fielded in multiple commercial applications, including machine control, maritime, aviation, automation, and measurement, delivering accuracies from a meter down to a centimeter. They will add E6 to their AsteRx family of multiple-channel, multi-frequency, multi-constellation receivers, and have developed a number of hardware and software mitigation techniques to combat jamming, interference and multipath, and to integrate receivers with inertial units for aiding.
Furuno is interested in resilient PNT for marine applications, and has examined the use of eLoran as an alternative to GPS, but has moved towards a system of radar beacons that detect radar pulses from passing ships and transmit their positions, enabling position determination. In tests, accuracies of around 2 meters have been obtained with two beacons.
Quascom’s approach is to add firewalls inside receivers, which toughen the processing and prevent distortion of position information. Quascom believes this will be necessary until authentication can be added into the GNSS system itself, so that any data received is validated and is known to be good.
Chris Rizos from the University of New South Wales, Australia, drew attention to the “holes” that exist in GNSS, and reviewed a number of possible “Band-Aid” fixes, such as Wi-Fi especially for indoor location. However, his solution seems to be to establish terrestrial networks transmitting GNSS-like signals.
Eurocontrol indicated that aircraft currently use inertial and DME extensively as a back-up to GNSS navigation. By 2030, there will be multiple constellations, and dual-frequency use should become commonplace in aviation, so GNSS navigation should be much more robust. Aircraft approaches are required to be in conformance with Required Navigation Performance (RNP), so would it be possible to develop RNP procedures for DME and inertial to be used as back-up during approaches in the event GNSS is disrupted?
To conclude the session, Airbus provided a “starter course” overview on inertial systems – how they work, the range of different types available, what they can achieve, costs, strengths and weaknesses and integration with GNSS.
The summit continued with subsequent sessions on:
Space technologies and users
GNSS monitoring of Earth and disaster management
Copernicus – Earth Observation
GNSS Education
Unfortunately, my deadline didn’t allow me to attend these equally interesting presentations.
There is also a manufacturers’ exhibit area at the summit that just fits into a couple of corridors near the main hall – around 20 booths. I talked with several of the manufacturers, including Spirent who has launched its latest GSS9000 multi-frequency-constellation simulator, with a four-fold increase in system iteration rate over the previous model. Exhibitors appeared to be pleased to be at the summit and by the level of interest shown by the attendees.
So, as this year’s Munich Summit concludes, where does this leave us? We’ve learned some new things about several GNSS topics and heard some interesting new concepts. Europe appears to be now focused on users and applications, to ensure there is market growth and use of Galileo. What stands out for me is the contrast between how European governments go about GNSS and how North America and the commercial world does the same thing without as much direct influence. This is nothing new, of course, it’s just the European way…
Galileo Growth, Constellation Updates, and Jamming
I used to spend quite a lot of time in Munich working on a multi-national, multi-role fighter aircraft program, so returning for this year’s Munich Satellite Navigation Summit stirred some good memories for me.
Held in the opulent Residenz Muenchen March 25-27, the conference always has a special atmosphere that these historic 1385 surroundings convey to the attendees. The former royal palace of Bavarian monarchs, the whole complex has ten courtyards and 130 rooms. The summit was held in the Max-Joseph Hall, which took a little bit of work to find at first, wandering around the huge complex. One wing of the building hosts a theater, and the mainhall is the primary concert venue for the Bavarian Radio Symphony Orchestra. Overall, this is a delightful setting.
Munich is in the Southern German state of Bavaria, and Bavaria has taken a real interest in the promotion and success of Galileo; witness the extensive Bavarian booth at recent European and North American GNSS conferences. Germany has, of course, been one of the principle nations providing significant funding for Galileo from its inception.
Ilse Aigner
So with this backdrop, the summit brings together people involved with GNSS from around the world to report on the current status of GNSS and to relate how their participation in satellite navigation has progressed. And, of course, Europe, Germany, Bavaria and the European GNSS industry, which is now recognized around the world, all take the opportunity to present their capabilities and successes.
The plenary session on the first evening covered GNSS, Earth Observation (EO) and Telecommunications — with the panel headed by Ilse Aigner, Bavarian State Minister of Economic Affairs and Media, Energy and Technology — an extensive mandate, even for a state-certified engineer who used to work for Eurocopter.
Dr. Merith Niehuss, speaking at the opening of the summit. (copyright: Munich Satellite Navigation Summit).
The host of the summit is actually the University of the German Army in Munich, and we received a warm welcome from two leading professors: Dr. Bernd Eissfeller and Dr. Merith Niehuss, the president. The theme of the summit was to move from implementation to utilization, and in typical European form, all parties were looking to shower potential users with funded solutions to problems of which users are not yet aware — so users clearly need government-provided education, pilot projects and funding. Not exactly a North American concept, where we tend to encourage users to buy our innovative stuff by demonstrating how it can save them money or earn them more revenue.
The European Commission, ESA, DLR, European GNSS Agency (GSA), Airbus, OHB, and Telespazio were also represented. The minister did indeed associate with and praise the local area, claimed 1,000 jobs created related to Galileo through an incubation center at Oberpfaffenhofen, and declared Bavarian support for satellite navigation.
Other important things mentioned by the panel at the plenary included an €11B budget for Galileo/EGNOS and Copernicus (EO project) under the Horizon 2020 program, and an intent to declare Early Service for Galileo before the end of this year with two or three dual Galileo satellite launches — the first two FOC (production) SVs should go to the European launch center in Kourou in April in preparation for launch around June. I heard in a corridor that launches may be planned for June, October and December, but an EU spokesman later said that there would only be two launches this year. OHB now has the contract to build 22 FOC Galileo SVs, each with a design life of 14 years, and they are bullish on their ability to deliver on time and budget.
The program continued the following day with constellation updates from GPS, Galileo, Beidou and the UN International Committee on GNSS (ICG) — GLONASS delegates were notably absent. There was much speculation that they declined to attend due to the Crimean situation, and one U.S. delegate even inferred that they were “uninvited.”
Constellation Updates
GPS: It’s estimated that there are ~2B GPS receivers in use, and there may be ~10B by 2020. A return on investment (ROI) analysis is currently underway, but a rough guess is that costs are in the tens of billions, while annual returns are of the order of $60-100B/year. Another IIF satellite (SV) launched last month, bringing the total to five SVs transmitting L1, L2C and L5, with seven more to come, and multiple launches are expected this year. There are 30 operational SVs on orbit, signal performance significantly exceeds the specs, and consistent, dependable performance has been provided for more than 20 years.
Galileo: First fix was achieved March 12, 2013, with four SVs, two (maybe three?) launches of two SVs each planned for 2014, and early operational capability to be declared by end of this year. €7B in funding is provisioned for 2014-2020, with 16-24 operational ground stations, Commercial Service (CS) planned by 2016 (more on this later), and a long-term evolution plan being worked up during this year.
BeiDou: Fourteen SVs are on orbit — five GEO, four MEO and five Inclined Geosynchronous Orbit (IGOS) satellites, providing dual-frequency services. Thirty total SVs are planned, and the intent is to provide open, compatible, interoperable signals with other GNSS free of charge. There was not much other news to report, other than that China intends to invest significantly in BeiDou to keep improving services.
United Nations ICG: Nine nations and European Union = International Committee on GNSS (ICG), with 20 other associate and observer States. Activities include GNSS compatibility/interoperability, GNSS enhancements, information sharing, and reference frames, timing and applications — lots of upcoming meetings and activities.
Regional and Augmentation Updates
WAAS: Phase IV is underway with GEO replenishment begun, introduction of L5 to replace L2, and replacement of obsolete component parts. One hundred GIII receivers were ordered with L1/L2C and L5 capability for delivery by September this year — and have capacity to also add Galileo. GIII receivers have already been fielded in six locations as part of initial integration testing. The Safety computer will also be upgraded starting this year. 3,912 LP/LPV approaches have been approved, of which 3,379 LPVs serve 1,667 airports. GBAS CAT I is progressing with four U.S. airport installations. System design approval began in January this year, and United Airlines has begun equipping over 90 B737/B787 for GPS approach and landing. Alternative Positioning, Navigation and Timing (APNT) investigations are underway (as a backup to GPS) with a hybrid DME-pseudolite configuration currently favored. Stanford University subsequently presented this and other concepts.
EGNOS: A €1.58B budget has been approved, and EGNOS V3 evolution is underway, with L1/L5 and GEO (SES 5 and Astra 5B) replenishment, a requirement to expand East and West and to the North to provide full coverage to all EU States.
About 100 EGNOS LPV approaches are approved — this year, it’s hoped to add 150 more.
QZSS: The operational concept has been proven with the first IGOS SV (Michibiki), so Japan is moving forward quickly to add another three SVs (3xIGOS and 1xGEO) and ultimately would like to have a total of seven SVs in orbit providing QZSS services. L1/L1C/L2C/L5 signals are identical to GPS, and L1s/L5s are augmentation signals, while L6 is proposed to be similar to Galileo E6, providing centimeter-level PPP-type service. QZSS essentially is intended to provide higher elevation satellites to improve urban navigation in dense cities.
IRNSS: Coverage extends 1500 km beyond India. The target is <20-meter accuracy, and signals are in L5 and S band and can be used independently or in dual-frequency combinations. A second IRNSS-1B GEO satellite is scheduled to launch on April 4.
GAGAN: The Indian SBAS was commissioned and certified in February this year with a number of ground stations, redundant uplinks and two on-orbit GSAT 8 and 10 GEOs. Gagan is now qualified to provide RNP0.1 (navigation accuracy to 0.1 miles).
QZSS and Japan’s Space Policy
This session provided some detail on how changes in Japan’s Basic Space Law has lead to efforts to expand the use of space and derive further economic benefits that this provides.
Munich Highlights
A collection of examples of Bavarian GNSS innovations followed in a very interesting session led off by an overview of Business Incubation Centers and their collaboration with government agencies and research centers. Small business start-ups are apparently encouraged to apply during four annual time-slots, and receive two years’ incubation support and cash incentives. This has lead to 81 new ventures and has apparently been the source of the 1,000 new jobs mentioned by the Minister of Economic Affairs. The annual European Satellite Navigation Competition and Galileo Masters competition have also generated a whole bunch of ideas and concepts (8,000), some of which have found support through this incubation process.
Airbus Defence gave a short overview of the testing work it accomplished in supporting the first Galileo fix and has prepared several vehicle test platforms, ready to take the next phase of Galileo testing to the streets in realistic, real-world environments.
DLR provided insights into a number of its activities, namely:
Iono mapping
Signal distortion
Multipath
Jammer mitigation – adaptive antenna and processing
GNSS repeaters – how they can become unintentional jammers
Spoofer and Multipath inbvestigations
Antenna designs
GNSS evolution – Maser and clock combination benefits
Army University of Munich discussed radio science experiments in the Solar System and experiments using Mars Express (above) in polar orbit around Mars and resulting measurements of the moon Phobos. Internal and external outreach efforts with numerous organizations were also mentioned.
IFEN provided more down-to-Earth information on the on-going activities at the GATE ground-based pseudolite range, which has enabled realistic outdoors testing of Galileo receivers, well in advance of signals from orbiting satellites. Recent testing has now been able to include the four operating Galileo SVs on orbit with GATE pseudolite signals. GATE will continue to evolve over the next few years to keep up as more Galileo orbital signals come on-line.
Fraunhofer presented information on its 40-channel GPS/Galileo/GLONASS chip-receiver (above) – claiming 1-meter accuracy, low-cost, robust reliable position solution, small form-factor and low-power. Following PRS test-bed development efforts, Fraunhofer has now received a contract to also deliver 20 pre-operational Galileo PRS receivers for use in initial pilot projects.
GNSS Interference
Vidal Ashkenazi, in his inimitable form, lead a panel discussion on interference, jamming (in particular Personal Privacy Devices, or PPD) and spoofing, and coaxed his panel members to provide a whole bunch of information on what’s being done, mitigation capabilities and potential enforcement. Unlike all the other sessions, Vidal’s panel members didn’t use presentations, but rather responded to wide-ranging questions on the subject from the session chair.
David Turner, representing the U.S. State Department, indicated that the ICG will meet shortly in Geneva hosted by the International Telecommunication Union (ITU) to focus on interference, jamming and mitigation. The recourse that nations have for use of PPDs by their people is the law — jammers are illegal, sale and purchase of them is illegal — however, Internet sales are very difficult to police. So detection and mitigation are required to find and shut them down. Dave’s presentation on the GPS.gov website indicates that the ICG is working on an education program for states to inform about GNSS sensitivity to interference and the threat to critical infrastructure if they are allowed to operate. The ICG also has a task force on detection, reporting and systems development.
ISRO indicated that PPD jammers in India are restricted, but permitted for gatherings such as at churches where personal safety may be an issue. Ground-based detection is needed, as well as stronger legal protection that may well prohibit use of PPDs altogether.
Japan Aerospace Exploration Agency (JAXA) indicated that it is working on “signal proofing” for QZSS.
BeiDou said it is building a monitor network in China that will detect jamming.
There was a general discussion on whether receiver manufacturers should be mandated to make receivers that are resilient to jamming – many thought that there have already been significant advances in that direction by manufacturers. The normal approach would be to develop requirements with industry, agency and user inputs, publish them, and call up the requirements in equipment specifications. In the U.S., the Department of Homeland Security is seeking an approach to detection and location.
Legal Impacts of Personal Privacy Devices (PPDs)
While the audience may have had high hopes that the legal eagles could come up with some magic prevention and prosecution solution, the next session was more of a legal background briefing without any concrete conclusions (quite similar to other discussions I’ve had with some lawyers in the past, actually).
The first briefing was from the European Commission/European Union, who indicated that the EU doesn’t own the frequency rights to Galileo (Oh Oh…). They have to operate through a member state, which gets the rights through the International Telecommunication Union (ITU) and then licenses use to the EU — the bottom line being that EU enforcement of jamming protection laws maybe be difficult, as the legal framework only exists at the national level for each state. The EU is trying to get recognition under another class of ITU membership.
EU regulations were presented that state that GNSS re-transmitters can only be operated legally by governments or government contractors. Or can be used indoors for indoor navigation, but only for emergency services at fixed sites which are pre-approved. Pseudolites can only be operated indoors, and there should be no interference to other systems. Jammers are forbidden and cannot be placed on the market for sale.
Eurocontrol had a lot to say about the impact on aviation navigation infrastructure and receivers on aircraft. Existing ground nav aids have limitations, the worldwide equipment infrastructure is becoming quite old — aviation has generally moved away to GNSS and inertial based navigation and uses ground navaids as backup. There is a conflict between regulating GNSS heavily for aviation and how people want to use it in the commercial world. We may have to consider a trade-off between heavily restricted GNSS operations, and wide open commercial GNSS applications.
David Sobel, from Electronic Frontier Foundation in the U.S., presented the contrary case for individual privacy. His argument is that sale of tracking devices is unregulated and can readily be purchased, so people may presumably use them to track others, thereby infringing their privacy. So why shouldn’t people be able to “defend their privacy” by use of PPDs?
Say an employer insists that a vehicle you are driving have a tracking device so he knows where you are. Isn’t the driver also justified in trying to protect his privacy? Since the police in the U.S. can no longer place tracking equipment on suspect vehicles without a warrant, tracking appears to be down to private individuals or companies, who it would appear, have the legal ability to attach tracking devices under most circumstances. So the argument goes that if people have a legitimate concern about privacy, there should be acceptable provisions to allow them to disrupt tracking.
If there is a service such as road tolling, there is an incentive for people to avoid these costs. So systems should be robust enough to avoid disruption. Enforcement is a problem — should police chase people they suspect have jammers, or should they rather chase criminals or help and protect citizens? Mitigation systems need testing, so to test these systems there has to be jamming transmission — which needs to be controlled and regulated. Restricting the import of bad devices into a country might be desired, but the manufacturing countries don’t tend to want to restrict exports as exports help their economy. Again, the argument seems to be that of personal privacy over potential risks and damages to society.
No solutions, but a healthy discussion of views from a legal perspective.
Precise Point Positioning (PPP)
The group discussing PPP options consisted of the GSA (charged with exploitation of Galileo services), several principle industry service providers of PPP, and the federal agency, which provides PPP-like services in Germany.
The GSA presented its ideas concerning the provision of high-accuracy PPP corrections over the Galileo E6 signal – the so-called Commercial Service (CS). The intent, however, would not be to disrupt the commercial marketplace. Nevertheless, GSA is proposing a public-funded service to be sold to users within a market that is already well served by commercial worldwide service providers who charge users for cm-level PPP service.
And while Trimble made a polite presentation on the many levels of capabilities of its TerraSat services, as did Veripos and to some extent Fugro, it was clear that the commercial providers are not eager to find competition in their market from a government entity. NovAtel also chimed in on this conflict as it will be involved in Veripos/TerraStar, following its acquisition by Hexagon. Fugro appeared to be interested in acquiring rights to distribute CS on behalf of GSA.
The German Federal agency promoted open data, source and standards from the IGS network to which it contributes: IGS is supported by numerous national agencies around the world. Orbit and clock PPP service is available 24/7 from multiple sources. However, the service is offered on a best efforts basis without a service guarantee, and cannot achieve the accuracies or convergence times of commercial services.
I talked subsequently with Michael Ritter, CEO of NovAtel, to learn the background to the Veripos/TerraStar acquisition. It’s clear that providing PPP services means added value to NovAtel when they sell receivers with PPP capability, so they will quickly discontinue offering Omnistar subscriptions and will shortly launch NovAtel Correct, offering Veripos (marine) and TerraStar (land) PPP subscription services. NovAtel is making significant inroads in the agriculture segment, and they see PPP service as an essential element of this and other businesses. The acquisition was worth something on the order of $200 million, so there is a vested interest in making these services pay and discouraging GSA entry into this market. Veripos will continue supplying other GNSS OEM receiver manufacturers — notably Septentrio, who use TerraStar services, now also NovAtel, and potentially another major GNSS manufacturer.
Future of GNSS in User Segment
Chaired by Greg Turetzky of Intel, this session opened the third day of the Summit. The presenters offered their concepts for current and future GNSS equipment and systems.
Stanford University outlined its work with FAA on an alternate PNT system to be used as a back-up to GNSS. It used to be that GNSS systems were designed to overcome space-weather effects and faults in equipment design or manufacture — nowadays, there are “bad guys” out there and we need to “protect, toughen and augment” these systems. Antennas can be built that impart a specific signature to the signals they transmit, and this may aid in finding and prosecuting the bad guys, but the main focus of work is development of a hybrid system using Distance Measuring Equipment (DME) and a pseudolite.
Tests have demonstrated good performance, and these prototype efforts could lead to aviation requirements (MOPS) development by 2018 and deployment by 2020.
Septentrio has been involved in Galileo since it began and was the first company with Galileo receivers. Nowadays, they have receivers fielded in multiple commercial applications, including machine control, maritime, aviation, automation, and measurement, delivering accuracies from a meter down to a centimeter. They will add E6 to their AsteRx family of multiple-channel, multi-frequency, multi-constellation receivers, and have developed a number of hardware and software mitigation techniques to combat jamming, interference and multipath, and to integrate receivers with inertial units for aiding.
Furuno is interested in resilient PNT for marine applications, and has examined the use of eLoran as an alternative to GPS, but has moved towards a system of radar beacons that detect radar pulses from passing ships and transmit their positions, enabling position determination. In tests, accuracies of around 2 meters have been obtained with two beacons.
Quascom’s approach is to add firewalls inside receivers, which toughen the processing and prevent distortion of position information. Quascom believes this will be necessary until authentication can be added into the GNSS system itself, so that any data received is validated and is known to be good.
Chris Rizos from the University of New South Wales, Australia, drew attention to the “holes” that exist in GNSS, and reviewed a number of possible “Band-Aid” fixes, such as Wi-Fi especially for indoor location. However, his solution seems to be to establish terrestrial networks transmitting GNSS-like signals.
Eurocontrol indicated that aircraft currently use inertial and DME extensively as a back-up to GNSS navigation. By 2030, there will be multiple constellations, and dual-frequency use should become commonplace in aviation, so GNSS navigation should be much more robust. Aircraft approaches are required to be in conformance with Required Navigation Performance (RNP), so would it be possible to develop RNP procedures for DME and inertial to be used as back-up during approaches in the event GNSS is disrupted?
To conclude the session, Airbus provided a “starter course” overview on inertial systems – how they work, the range of different types available, what they can achieve, costs, strengths and weaknesses and integration with GNSS.
The summit continued with subsequent sessions on:
Space technologies and users
GNSS monitoring of Earth and disaster management
Copernicus – Earth Observation
GNSS Education
Unfortunately, my deadline didn’t allow me to attend these equally interesting presentations.
There is also a manufacturers’ exhibit area at the summit that just fits into a couple of corridors near the main hall – around 20 booths. I talked with several of the manufacturers, including Spirent who has launched its latest GSS9000 multi-frequency-constellation simulator, with a four-fold increase in system iteration rate over the previous model. Exhibitors appeared to be pleased to be at the summit and by the level of interest shown by the attendees.
So, as this year’s Munich Summit concludes, where does this leave us? We’ve learned some new things about several GNSS topics and heard some interesting new concepts. Europe appears to be now focused on users and applications, to ensure there is market growth and use of Galileo. What stands out for me is the contrast between how European governments go about GNSS and how North America and the commercial world does the same thing without as much direct influence. This is nothing new, of course, it’s just the European way…
The European GNSS scene received an early Easter present with the successful launch of two new-generation transponders for the European Geostationary Navigation Overlay Service (EGNOS) satellite-based augmentation system (SBAS). The two geostationary transponders, GEO-2, rose on board the SES ASTRA 5B satellite from the European Space Port in Kourou, French Guiana, on March 22 via an Ariane 5 lifter. The new transponders will provide higher accuracy positioning signals to those citizens and professionals using EGNOS enabled receivers.
Together with the previous transponder replenishment on the SES-5 satellite launched in July 2012, GEO-2 will ensure the continuity and quality of the EGNOS open service and safety-of-life services for the next 15 years. Once validated in orbit, the signals will be introduced in current EGNOS operations and will support the new EGNOS generation (EGNOS V3). EGNOS V3 will provide dual-frequency signals on L1 and L5 bands and augment both GPS and Galileo constellations as part of the Multi-Constellations Regional System (MRS) concept.
EGNOS is currently made up of transponders on board three geostationary satellites (Artemis, Inmarsat 3F2, Inmarsat 4F2), and an interconnected ground network of forty positioning stations and four control centres which cover most of the territory of the European Union. The ASTRA 5B payload for EGNOS will essentially extend transponder capacity and geographical reach over Eastern Europe and neighbouring potential markets.
Europe’s first venture into satellite navigation, EGNOS represents a major stepping-stone towards Galileo. EGNOS improves the accuracy of GPS by providing a positioning accuracy to within three metres together with system integrity messages. The system offers three services: an Open Service that is free of charge; a Safety-of-life Service (SoL) that was certified for civil aviation in 2011; and a Commercial Service – the EGNOS Data Access Service (EDAS) that disseminates EGNOS data in real time.
Since the beginning of 2014 the European GNSS Agency (GSA) has been responsible for the operation and service provision of EGNOS. “The successful launch is an important achievement in view of the enhanced performance that EGNOS will provide both today and in the future,” said Carlo des Dorides, GSA executive director.
EGNOS Extension
Future extension of EGNOS was discussed at the recent Munich Satellite Summit (see below and other articles in this issue of EAGER).
While GSA is now EGNOS exploitation manager, the European Commission is responsible for the overall programme, said Ignacio Alcantarilla Medina, deputy EGNOS project manger at the Commission. With medium-term finances for the service secured, through a budget of € 1,580 million for the period 2014 to 2021, the main aim for service extension was to ensure complete coverage of all EU territories.
“Coverage of Member States is the priority; that is what budget is for,” said Alcantarilla Medina. This essentially means reinforcing coverage in the east of Europe and extreme north and overall increase robustness.
Currently (March 2014) there are 100 EGNOS-enabled LPV procedures for the civil air space published in Europe. During 2014 a further 150 LPV procedures should be completed, he stated.
Once all EU territory is adequately served, then further extension might be possible. International projects in terms of demonstration were being undertaken under the European Commission’s FP7 and Horizon 2020 research programmes and funding for international extensions could come from third party or Commission sponsored development funding.
Interestingly, in the light of recent political events, funding for extension of EGNOS to the Ukraine has already been allocated in the European Commission’s budget by DG Development. Other countries could benefit from this type of funding or from other international development aid. An ambitious flight test campaign over Moldova, Poland, Romania, and Ukraine was carried out in the second quarter of 2013 under the auspices of the EGNOS Extension to Eastern Europe: Applications (EEGS2) project. Full demonstration of EGNOS performances and capabilities was performed flying Instrument Landing System (ILS) overlay procedures and by providing real guidance to the pilots during final approach. In total, 19 flight trials were performed between April and June 2013.
European Showcase at Munich Summit
Perhaps the good EGNOS news created the warm glow bathing the Munich Satellite Summit in late March. While input arrived from all parts of the world and all major satellite navigation programmes — except Russia and GLONASS — the majority of the discussions focused on the European programmes, Galileo/EGNOS and Copernicus/Earth Observation, and thus by extension on European technological accomplishment.
Matthias Petschke, Director of EU Satellite Navigation Programmes at the European Commission proclaimed: “Galileo is a reality. We are on track again!” But he stressed that infrastructure does not automatically generate services, and the focus must now be on service provision. On integration, Petschke emphasised that in most cases services meant applications, and few current applications relied on only one source of data. This meant it was not a question of “whether” for integration, but “what else” can be gained from integration of data.
The big challenge is to transform space infrastructure into commercial service platforms that provide clear benefits to users and society. The introduction of Galileo Early Services, possibly as early as Q4 2014, would herald this move to service platforms and that was when Europe needed to “get very, very busy.”
Galileo Boasts of Superiority. The plenary audience heard repeated statements from leading European figures on the ‘superiority’ of the Galileo system over current GPS satellites. The grinding of teeth from the various U.S. delegates was almost audible on some occasions but, in the spirit of world peace, they deigned to publicly challenge such statements.
Typical was Jean-Jacques Dordain, director-general of ESA, who proclaimed Galileo as a success with technologies much better than GPS. Although he did concede that with 22 satellites still to launch this “was not the end of the process – but a real good start.”
Evert Dudok of Airbus Defence and Space stated, “To develop from scratch a system significantly better than GPS is not easy, but we are creating the best system.” A number of delegates supported this, indicating Galileo’s better-quality code and phase measurement signals that were particularly important for higher-accuracy applications. The excellent, over-specification performance of the initial four in-orbit satellites was often quoted.
From a commercial point of view, Carlo des Dorides of the GSA claimed that effectively the European Union already had a 25 percent share of the sat nav market and that one-third of the existing global receiver base was already Galileo compatible. He saw a great future for the system.
“Galileo is unique compared to other GNSS due to its civil nature,” said des Dorides. And the user was at centre of the system’s evolution, with developments in Galileo moving from technology push to demand pull. The clear role of GSA was to ensure that both Galileo and EGNOS delivered the valuable services they are designed to deliver.
Galileo’s public regulated service (PRS) should be a key factor in growing market share in secure civilian applications with its enhanced ability to counter intentional and unintentional signal interference – another main topic of the Summit. In a dedicated session on combating interference, the introduction of a ‘PRS-lite’ authentification signal on the Galileo open service was mooted, which could be a very interesting development.
The absence of any Russian input to the Munich SatNav Summit — save for a small pile of the unexpectedly glossy GLONASS Herald publication outside the registration hall — brought the chill of geopolitics into the usually apolitical space arena.
Does Augmentation Have a Future?
Another interesting question raised at the Summit – given the near-future fact of four compatible GNSS constellations on station – was whether there will be a role for augmentation systems such as EGNOS and WAAS?
Deborah Lawrence of the FAA was clear that her organisation was working to take advantage of the multi-constellation future and that the role of SBAS might change, but that the FAA is already looking towards what the requirements for SBAS in 2040 might be.
European Commission spokespersons agreed with the need for multi-constellation, globally interoperable SBAS for the foreseeable future, not least because the currently installed receiver base in the aviation sector would likely have a 20-year replacement horizon.______________
Tim Reynolds is director of Inta Communication Ltd. and a long-term Brussels observer writing on many aspects of European government policy and implementation for a range of clients and publications. The material presented here was first prepared in a somewhat different form for the GSA. He is the contributing editor for GPS World’s new quarterly e-newsletter, EAGER: the European GNSS and Earth Observation Report. Subscribe free at env-gpsworld-integration.kinsta.cloud/subscribe.
With the first two full-operational-capability (FOC) Galileo satellites successfully through their thermal-vacuum tests, the program’s next hurdle is securing a firm launch date in June aboard a Europeanized Russian Soyuz rocket, operated from Europe’s spaceport on the northeast coast of South America.
It will not be a walk in the park. Competing with the two Galileo FOC satellites for the same June Soyuz launch are four commercial broadband communications spacecraft owned by O3b Networks of Britain’s Channel Islands, a start-up that promises, if all goes well, to launch as many as 100 satellites.
O3b and Galileo managers as of late March were rushing to complete final tests to be able to be first to ship their craft to the spaceport and thereby lay claim to priority rights aboard the June Soyuz. Both say they can be on a plane to the Guiana Space Center launch base in April. Should they arrive within days of each other, the already nightmarish dilemma confronting the Arianespace commercial launch consortium will only grow more complicated.
Here’s the matchup.
Powerful Backer. O3b, in addition to its plans to launch dozens of satellites if the business model proves out, is backed by SES of Luxembourg, the world’s second-largest satellite fleet operator and as such a big Arianespace customer.
SES has already shown itself disinclined to maintain its loyalty to the heavy-lift Ariane 5 rocket operated by Arianespace by booking three less-expensive launches, one already completed, aboard the new Falcon 9 rocket operated by SpaceX of the United States. Arianespace can ill-afford to alienate SES, whose 50-satellite fleet requires 3-4 launches per year just to maintain its existing capacity.
The four first O3b satellites in orbit all have a defect that could cause one or more of them to stop functioning at any time. Without at least four satellites — and preferably six — O3b does not have a business and its future is put into question.
It would be, to say the least, a public relations calamity for the company if its initial commercial operations, which began in March, were to be suspended in the wake of a satellite failure while waiting for a second batch of four spacecraft. This explains the extraordinary pressure that SES is placing on Arianespace on behalf of a June Soyuz launch for O3b.
Does it really matter, O3b backers say, if Galileo waits until the next Soyuz launch slot, tentatively set for August?
Emphatic Politician. It matters to the European Commission, which owns Galileo. Commission Vice President Antonio Tajani has all but pounded the table, insisting that the European Space Agency, hired to oversee Galileo’s technical development, ensure three Galileo launches on Soyuz rockets in 2014.
Four initial-operating-capability Galileo satellites are in orbit. Indications are that their performance exceeds specifications. Three Soyuz launches carrying two satellites at a time would bring the constellation to 10 spacecraft, enough to offer initial commercial services, according to the Commission.
Tajani has made clear how much he wants that feather in his cap as he prepares to leave the EC this year, probably headed for a political career in Italy. Make no mistake: as is the case with many wounded animals, Tajani’s status as a lame duck has made him all the more fierce in his insistence that Galileo meet its three-launch schedule in 2014.
Tajani has put very public pressure on the European Space Agency, which in turn is pressuring Arianespace, for Galileo launches.
Ariane’s Quandary. Arianespace is already facing an exceptionally crowded launch manifest in 2014 as it coordinates the schedules of three vehicles: the small Vega rocket in addition to the medium-lift Soyuz and the heavy-lift Ariane 5. Because both O3b and Galileo are late, neither has an obvious claim of priority status at Arianespace, which is clearly hoping that the problem will solve itself when either O3b or Galileo arrives at least several weeks ahead of the other.
At press time, the next Soyuz launch was scheduled for April 3, carrying a European Commission environment-monitoring satellite. Commission officials will attend the launch and no doubt use the occasion to press their case for Galileo.
There is no telling how this will turn out. Satellites have been known to face last-minute problems even after arrival at the spaceport. This happened to O3b in 2013, as the in-orbit defect did not surface until just before its scheduled Soyuz launch.
But if one were to hazard a guess, here is the most likely scenario: O3b arrives ready for launch several weeks ahead of Galileo and secures the June launch. Galileo moves to August and is promised a second launch in the autumn. O3b’s planned second launch in 2014 is moved to early 2015, as is the planned third launch of Galileo.
The effect of these schedule slips on the cost of the Galileo program, which is about a year late — cost overruns that Tajani has vowed will not be paid by the Commission — is a subject for another day.
The opening plenary session of the Munich Satellite Navigation Summit is convening as this column goes to the electronic press for distribution. Coverage of these top-level system briefings before a select international GNSS audience in Munich will appear in two e-newsletters next week, The European GNSS and Earth Observation Report (EAGER), and in a shortened form via the Navigate! Weekly.
Until then, here’s an update on the CNAV debate in the United States and wider system-operator background from two recent meetings.
CNAV So Far. In the closing hours of 2013, a departing U.S. Cabinet under-secretary for Transportation dropped a verbal bomb on the Pentagon, in the form of a communiqué expressing concern about reliability of the new civil navigation message (CNAV) signal scheduled to emanate in April from select GPS satellites on orbit. Subsequent explosions were detected in halls from Washington to Colorado and Los Angeles.
Meanwhile, one semi-public organization communicated to its members that it finds nothing disturbing about the plan, set to take effect sometime in the coming month.
IGS Steps Forth on CNAV. The International GNSS Service, a voluntary federation of more than 200 worldwide agencies that pool resources and permanent GPS and GLONASS station data to generate precise GPS and GLONASS products, issued a statement to its members and participating institutions in March. “We are confident that the IGS network is not at risk due to this change, and it is a welcomed step towards GPS modernization.”
The communiqué from the Infrastructure Committee went on to say that “This event is considered innocuous to the stability of the receiver network since during a limited GPS CNAV test campaign in June 2013 the IGS network was not affected, only a very specific receiver problem was detected by the IGS Multi-GNSS Experiment, which was informed to the GPS ground segment and addressed.
“Most modern receivers can track L2C and L5 and the CNAV messages, but the decoded messages should not be used by the receivers. The traditional L1 NAV messages (LNAV) will continue to be transmitted as usual and thus the receiver navigation files, birds, etc., will continue unaffected. Older receivers will be completely unaffected as they do not track L2C or L5.
“In any case IGS Station Operators and Station Network Managers are advised to keep an eye on receivers and on their data outputs during the start of the CNAV activation. Just in case something strange is observed please stop data submission and notify the IGS (Network Coordinator, Infrastructure Committee) so that we may investigate the issues quickly. In case of doubt with your own equipment please contact the receiver manufacturer and inform the IGS.”
PNT Advisory Board Airing. Prior to the appearance of the CNAV letter from the departing deputy secretary, the U.S. PNT Advisory Board heard a report in early December from Air Force Space Command on said implementation plan for the GPS CNAV message on L2C and L5. The minutes of that meeting were recently released.
The minutes relay the gist of General Whelan’s CNAV remarks as: “CNAV has been under discussion for a considerable time. Currently, L2C and L5 signals are being transmitted, but without a navigation message. AFSPC is working hard to activate these messages as soon as possible. One of the reasons for the delay is that additional time was needed to complete testing prior to activation. Testing began in late summer 2013 and, based on initial test results, a way ahead has been plotted. . . . Current plans are to begin initial broadcasting in the spring of 2014. CNAV uploads will occur twice weekly. The signal will meet GPS Standard Positioning System (SPS) standards, but may not achieve current accuracy levels until full implementation in late 2014.
“CNAV live-sky testing occurred in June [2013] and was conducted in cooperation with civil, industry, and international partners. The two-week test series included independent assessment and verification. The tests identified four errors that required action. The first, which was addressed in real time, related to implementation of the test series. The second required improvement to the tools suite, which should be totally integrated into the ground segment by December 2014. The third and fourth errors required patches to satellite software. All four issues are now regarded as closed.”
A subsequent presentation to the PNT Advisory Board from a Department of Transportation spokesperson did not directly mention CNAV, according to the meeting minutes, but did include this reminder on civil signal monitoring:
“DOT is responsible for performance monitoring of GPS civil signals. The International Committee on GNSS’s (ICG’s) transparency principle states that ‘Every GNSS provider should publish documentation that describes the signal and system information, the policies of provision, and the minimum levels of performance offered for its open service.’ Currently, this is only done on GPS L1 C/A signals. Performance standards for L2C and L5 have not yet been established. The crucial function of signal/service monitoring is to verify that commitments to GNSS performance are being met. Additionally, monitoring improves the situational awareness for GNSS operators, and provides assurance that any civil service failure is detected and resolved promptly.”
Other Global Developments. The International Committee on GNSS (ICG) held a meeting of its Working Group A on Compatibility and Interoperability, in November 2013 in Dubai, United Arab Emirates. A brief summary of those proceedings is now available.
The notes evidence steady, deliberate organizational and international progress on collaboration between system providers of GNSS signals.
Among new presentations to the body came several from Russia. Viktor Kashenko, Russian Federation, presented on the “Prospects for Status and Development of GLONASS System Space Complex,” an update on the GLONASS space segment noting that there is a full constellation of GLONASS-M satellites. CDMA signals at L1 and L2 are expected to be available beginning around 2016 or 2017.
Grigory Stupak, Russian Federation, followed with a presentation titled “SDCM Present Status and Future GLONASS Signals Development.” There are currently 22 SDCM ground stations around the world with a goal of creating seamless coverage throughout Russia with LPV-200 capability. The U.S. asked a question about whether SDCM provides corrections for other constellations in addition to GLONASS. The Russian Federation explained that SDCM currently augments both GLONASS and GPS, but additional constellations could be added in the future.
Oleg Denissenko, Russian Federation, discussed the goals of the GNSS Monitoring and Assessment System being developed in Russia and identified a list of parameters to be monitored by the international systems.
Xurong Dong from China gave the status of the International GNSS Monitoring & Assessment Service for OS (iGMAS). Initial operational capability (IOC) is expected in June 2014. Ten tracking stations have been installed so far, and 25 additional stations are expected to be added in the future. A signal quality monitoring station has also been established in China and a new 40-meter antenna is expected to be installed in 2014.
Jeffrey Auerbach from the U.S. State Department presented on outcomes of the second Interference Detection and Mitigation (IDM) April 2013 workshop. The European Union noted that they are conducting a survey of professional users in Europe about privacy concerns, and perceptions and understandings of interference and jamming.
Stanislav Kizima, Russian Federation, provided an overview of the International IDM system concept and recommended the creation of an IDM system database server to be used for monitoring GNSS facilities. He suggested identifying formalized data exchange formats for IDM. A question was asked about whether something like this already exists in Russia. Kizima responded that Russia does have an active system for monitoring interference, but not specifically for GNSS. There are some issues with the existing system because GNSS is not listed as source of interference and the technical facilities are not able to analyze parameters specific to GNSS. Hence the need for development of specific GNSS monitoring facilities. Tom Stansell from the U.S. responded that cell phones could be enabled to become individual detectors of GNSS interference, and the interference source location could be determined this way. This technique is known as crowdsourcing. Kizima noted that cell phones give information on signal power, but not measurement equipment.
China continued the session on spectrum protection with a presentation by Weimin Zhen on a proposal to develop a template for GNSS interference detection and reporting. He suggested that a generic template specific to reporting GNSS interference be developed.
Upcoming principal WG-A related meetings:
WG-A Inter-session Meeting, Geneva, Switzerland, possible dates July 16-18, 2014)
As the tragedy of Malaysia Airlines Flight 370 riveted our attention, many sprang into action. More than two million volunteers scoured online satellite images for signs of the plane via Tomnod, a crowdsourcing project of DigitalGlobe.
Volunteers like Robert Wilkinson are asked to view satellite photos and tag any signs of wreckage, rafts, oil spills and other objects that may be of interest. “It took me the first hour to understand that I was looking at waves or tidal pools rather than debris or anything useful to the search,” said Wilkinson. “After that, I might have seen one or two things that I couldn’t explain, but I tagged them appropriately.”
All images that are tagged are reviewed by special algorithms before being viewed by experts. Tomnod reported that more than 650,000 objects had been tagged, and the maps had been viewed more than 98 million times.
Calls on Flight 370. This month, the Internet was full of questions about mobile communications and the missing Malaysia airplane. People didn’t understand why passengers on board the flight hadn’t made mobile emergency calls. On September 11, 2001, it was widely recalled, some passengers were able to make phone calls from the hijacked planes. Flight 370 was likely too high or going too fast to enable phones to register with cell towers. Experts say that planes flying above 5-10,000 feet would have difficulty making connections. Radar analysis estimated that the plane may have been flying as low as 12,000 feet or as high as 45,000 feet. On 9/11, passengers made calls when the plane was low or used satellite air phones available in business class.
GPS and Football. Security at places where large crowds congregate is always a concern. At last month’s Super Bowl, GPS devices tracked and monitored the team vehicles. To protect the GPS, a product from Exelis was used to detect and locate GPS interference sources to protect critical GPS signal-dependent infrastructure. Eight sensors were positioned in an array pattern to detect and locate any jamming sources.
Lost in Space. Google’s Project Tango is showcasing a prototype phone brimming with software and sensors that creates a 3D map of the environment. A select group of developers has been given the device and are expected to create innovative applications, including navigation by sight. We do know that one of these devices will be heading to the International Space Station and will be part of a project to enable robots to explore the inside and outside of the craft. The terrestrial uses of the device will include being able to map the interior of a house (the sofa goes where?), navigate through complicated buildings, provide accessibility for those with impaired vision, and emergency response. Project Tango may find interesting uses with 3D printing, which is riding a wave of interest.
GPS and LED Lights. Philips has been demonstrating an indoor location-based shopping service based on location positioning from LED lighting infrastructure. The system works by using lighting fixtures that form a dense network that not only provides light, but also acts as a positioning grid. Each fixture is identifiable and able to communicate its position to an app on a shopper’s smart device. ByteLight is another company with LED indoor location technology. Wi-Fi and Bluetooth low-energy (BLE) beacons are more established for indoor positioning.
Truck Market on the Move. Market demand remains strong for mobile resource management (MRM) devices, particularly among local fleets, reports C.J. Driscoll & Associates. “Manufacturers of light and heavy commercial vehicles are becoming increasing involved with telematics,” says Clem Driscoll. “Heavy truck manufacturers are primarily focused on enabling remote vehicle diagnostics.” Many of the large MRM companies are establishing added offices around the world.
Awkward Timing. INRIX is launching Russia’s first comprehensive traffic information and driver services platform. Russia has many challenges including difficult traffic conditions. The service, available on Audi cars, was developed through an exclusive partnership with Russia’s navigation services provider cdcom. INRIX XD Traffic in Russia provides real-time traffic and incident information covering more than 236,000 kilometers of roadways across 55 cities.
When one talks about the worldwide location industry, mobile resource management — fleets and trucks, for instance — aren’t sexy at all, but they make money. What is supposed to be sexy is location-based advertising. According to many analysts, location-based advertising has been hampered by a few things: education for both consumers and mobile advertisers, privacy issues, and relevant proximity information so folks can use it to make purchases. Another concern could be the expense of rolling out indoor beacons.
BARCELONA—Major consumer privacy concerns aside, companies are starting to see growth in location-based advertising, with new markets emerging in Europe. While the numbers of mobile advertising companies has decreased at the Mobile World Congress, held here in February, from just two years ago, the remaining players are seeing a more mature market.
Mobile advertisers are beginning to realize that location is the Holy Grail for growth, said Cameron Peeples, Airpush vice president of marketing. “People going into New York from Newark during rush hour can receive a different call to action because of a created geo-fence. Advertisers can determine whether the traveler is there on business or looking for a hotel and other travel deals,” he said.
Before Mobile World Congress, Los Angeles-based Airpush partnered with AirX, a large mobile ad exchange company. The majority of the AirX inventory, about 120,000 Android applications, includes highly-sought-after GPS location data, the company said.
There are large differences between the North American and European markets for mobile advertising, Peeples said. “The mobile advertising market [in Europe] is definitely evolving. The European market is key for us, dramatically higher than other markets,” he said. “[The European] market seems to have people connected to a lot of things — they are more mobile, use public transportation more, and always have a phone that is more centric to who they are.”
Making location-based advertising relevant to the consumer is still a major challenge. “Our focus next year is on native advertising. Native advertising combines not only the right message, but the right delivery vehicle,” Peeples said. “No one bicycling enthusiast wants ads tailored for someone who wants flowers.”
Peeples said the privacy issues are a big deal, but his company’s services are opt-in. “A lot of it is loyalty advertising. It’s all opt-in,” he said.
xAd Partners with Waze, Sees UK Growth
Another mobile advertising company, New York-based xAd, is also making inroads in Europe. “We are in the UK right now, which is really WiFi-focused. A lot of our early [location-based] advertising efforts are in education — to educate consumers and the advertising agencies about the power of location and mobile,” said Monica Ho, xAd vice president of marketing. “Not all location is created equal. The real value of [location-based advertising] is the proximity target to market to.”
Right before Mobile World Congress, Waze selected xAd as its third-party provider of search and display mobile ads in the United States. Waze, which was bought by Google in a deal worth more than $1 billion, is a top three map and navigation app in the iTunes store — a ranking that was probably helped by the Apple Maps debacle in 2012.
The companies say the deal will place xAd’s mobile ad targeting technologies into Waze’s location-based advertising platform.
Ho said there are still two areas of concern for location-based advertising: relevancy to the consumer and privacy issues. “There was privacy backlash from Nordstrom collecting consumer information from their Wi-Fi system,” she said, referring to the controversy last year when the retailer was accused of capturing consumer information during an indoor positioning test.
Apple to Roll out Upgraded Maps on iPhone 6
Speaking about Apple Maps, many industry analysts says the company has come a long way since the very public embarrassment nearly two years ago over map inaccuracies and flaws. The company recently released iOS 7.1, but is expected to rollout iOS 8 when the iPhone 6 debuts later this year.
With the debut of the iPhone 6, an updated version of Apple Maps will also be released, according to published reports.
Last year, Apple bought two companies, HopStop and Locationary, to allow the company to entrench itself once more in the location business. How firmly those roots prove to be, and how well they serve the company against archrival Google, remain to be seen.
Apple has been stockpiling companies and mapping software since its introduction of Apple Maps on iOS devices, which had a rough start. GPS World’s LBS Insiderreported extensively on the problems Apple encountered with its mapping software. Some of these problems included sending drivers to a wrong location and direction.
After the mapping software problems were made public, Apple CEO Tim Cook apologized for the mapping software’s problems and even suggested that users go to such competitors as Waze, MapQuest, and Microsoft’s Bing.
In other location news:
A Wall Street Journal reporter basically said there was nothing much new at Mobile World Congress — and that the excitement and action was at the outlying conferences at Fira Montjuic. One of these more interesting conferences, Four Years From Now, or 4YFN, featured start-up companies making pitches and displaying their new products, some of which included location capability.
The Mobile World Congress final stats. Organizers said MWC had more than 85,000 attendees from 200 countries — an increase of 13,000 from the previous year. It’s now being touted as the biggest and best wireless show.
In February, GPS World reported that TruePosition had purchased Skyhook for an undisclosed price. Skyhook provided location services to a number of companies including Apple and Samsung. The interesting issue is Skyhook’s lawsuit with Google, which alleged that the Internet giant influenced smartphone manufacturers to abandon the Boston-based company. According to published reports, the legal action still is going forward.
AT&T Mobility is shuttering its location-based Alerts marketing program. The company said it would release an updated version later this year. AT&T Mobility launched Alerts in late 2012. It featured free opt-in, location-based text message alert service. Participating retailers included Stapes, Gap, Zales, Neiman Marcus, and others.
I didn’t go to South by Southwest. Is my cool-guy card revoked? One of the reasons I didn’t is because, outside of meetings that were not part of the conference, there was not one location industry announcement made there. Maybe something will change my mind next year, but call me an old fogey — I just didn’t see the need to go to Austin this year.
A still from the movie Gravity, where space real estate feels really small and collisions frequently happen. (credit: Warner Bros. Pictures)
Wow, what a bevy of acronyms. If you already know what they mean, great. If you don’t, just hang in and all will be made clear.
E. L. Doctorow once wrote, “Writing is a socially acceptable form of schizophrenia.” Now, I am not sure how I feel about that or how my daughter who is a practicing Clinical Psychologist (PsyD) would interpret that, but as she publishes (publish or perish) behavioral science papers in the public domain, she did remind me of a paradigm shift in journalism today that has stuck with me. She said simply, “Dad, everything you publish today is out there and available to everyone, everywhere, all the time, in multiple venues.” As mundane as that may sound to everyone under 20 years of age, to those of my generation it is indeed profound, as it socially delineates the technical world we live in today that has afforded unprecedented data and document availability for the first time in history. Never before have so many had virtually instantaneous access to so much information. Can you say Siri?
The really interesting part of this instant-access phenomenon is that it not only applies to articles and columns that I and my fellow journalists pen today, but includes access to everything we, and anyone else, has ever written that has been preserved. As you read this, thousands of books (some moldering for more than two thousand years), reports and articles are being scanned daily and made available for the world to read in a digital or new print format.
Numerous major programs today are digitizing books, documents, magazines and newspapers daily, such as Amazon and the sometimes annoying Captcha program, which stands for Completely Automated Public Turing test to tell Computers and Humans Apart. In 2007 the Alfred P. Sloan Foundation awarded the Library of Congress more than $2 million for the “Digitizing American Imprints at the Library of Congress” effort. Thanks to this program and others, such as Project Gutenberg, most of the digitized volumes, 45,000 and counting for Project Gutenberg, include most of the writings of Thomas Jefferson, Benjamin Franklin and George Washington, and they are available online free of charge. Depending on your point-of-view and physical location (think Mainland China, Russia and North Korea) that can either be a scary thought or wonderfully liberating.
For almost everything written and published — and published has a new definition in this context — in the past ten years or so, and certainly for the knowable future, the digital and availability timeline equals immediate access. That is because today almost every written document originates in a digital format, while printing and publishing are secondary actions. Think about how this has changed the way you work and read today. It is truly a major revolution of epic proportions, taking place in an evolutionary manner.
USAF SAB
Recently, I was reminded of this new electronic availability as it concerns an academic paper I was honored to edit and minimally coauthor as the Executive Officer for a very distinguished committee of preeminent scientist and physicists, more than 17 years ago when I served on a USAF (United States Air Force) Scientific Advisory Board, or SAB. I have been honored to serve on several SABs and have written or contributed to several SAB reports, but this one was particularly intriguing albeit esoteric in nature, and unless you were interested in the hazards of space debris at the time, which many of us were, you may never have heard of it until now. The full title of the report is rather lengthy, as is common with scholarly scientific reports:
A snapshot of the locations of all cataloged space objects (from the report).
The report was, at the time, and many of us feel today is still, the quintessential and defining document on the hazards or non-hazards of space debris and has been liberally quoted in scientific documents and treatises for the last 17 years.
Meanwhile, NASA (the National Aeronautics and Space Administration) as an organization has always been a bit of a harridan concerning space debris, and it has been known to sensationalize the effects that cascading space debris may have on space assets. Of course, they are always quick to point out that we academics and scientists outside of NASA only worry about absolute numbers and probabilities, while they — as the recent blockbuster movie Gravity amply exemplifies — worry about human lives in an extremely hostile space environment. This is not to say that space debris is not a valid concern; however, this SAB report clearly points out that the NASA cascading theory is more sideshow sensationalism of the Hollywood blockbuster mentality rather than supportable scientific theory. Indeed, space is a very big place, and as Einstein stated, it is always expanding — so you be the judge.
Space Surveillance
But I digress, because for the first time in recent memory, it was not the space debris aspects or Volume Four of the SAB report that made it a document of interest, but rather the First Volume on Space Surveillance that evidently piqued the USAFs interest. In Volume One, the committee made a recommendation (remember, this was seventeen years ago), that to successfully surveil space, you must do it from space and not from the Earth’s surface. Our actual recommendation in part stated, “…the committee recommends that the Air Force pursue surveillance of space from space with search capability.” And then we proceeded to move into tens of pages of technical specifics, which is more than most of you would ever want to take the time to read.
In a nutshell, as it turns out when you surveil space objects, natural and manmade from Earth, you encounter a multitude of bothersome effects you must deal with, such as weather (clouds, storms and lightening — none of which are good for sensitive optical sensors), atmosphere, solar disturbances, signal disturbances, background noise, and more. Now when you surveil space from space, most of these bothersome effects are mitigated to a major degree by the vacuum of space. In the SAB report, in much more detail than I can relate here, we basically concluded that the only successful way to continually monitor and surveil space and objects in space, both natural and man made, is to undertake that surveillance effort from space — in other words, surveil space from space — ideally from a GEO or near Geosynchronous orbit spacecraft with multiple sensors, including multi-spectral sensors that surveil both natural and manmade objects and phenomenon. Seventeen years later it appears that someone listened, and fortunately that someone belonged to an institution, the United States Air Force.
The Secret’s Out
A few weeks ago, General William Shelton, the Commander of Air Force Space Command (AFSPC) announced that by the end of the year, under a program formerly in the SECRET domain known as the Geosynchronous Space Situational Awareness Program, or GSSAP, “…the USAF plans to launch two space surveillance spacecraft into high-altitude orbits later this year to monitor satellite traffic in the congested geosynchronous belt 22,300 miles above Earth…GSSAP will produce a significant improvement in space object surveillance, not only for better collision avoidance but also for detecting threats…GSSAP will bolster our ability to discern when adversaries attempt to avoid detection and to discover capabilities they may have which might be harmful to our critical assets at these higher altitudes.” Shelton made these remarks in a speech at the Air Warfare Symposium in Orlando, Florida, in February.
While these are not the first space surveillance satellites launched by the USAF, they are the first that peer down from on high. Currently the USAF also operates the SBSS or Space Based Surveillance Program, but these satellites surveil all of space from LEO (Low Earth Orbit) altitudes with an optical telescope. Their GEO targets are more than 22,000 miles distant. The newly announced GSSAP satellites will have much more fidelity and have the added advantage of surveilling GEO assets from GEO.
ANGELS and GPS
All very interesting, you say, but where does GPS come into play? Glad you asked. While the GSSAP mission will undoubtedly use limb-of-the-Earth GPS signals for guidance and orientation, the GSSAP mission will also host two other small satellites known as ANGELS, or Automated Navigation and Guidance Experiment for Local Space. The ANGELS job will be to test accelerometers and specialized algorithms that will utilize the GPS navigation signals being broadcast from 11,000 miles away in their MEO orbits, for precision guidance when in close proximity to other satellites, thereby reducing the probability of a collision. Think about this one for a while and all kinds of possibilities become apparent. Why not equip every U.S. satellite with ANGEL technology? Currently, the Air Force fact sheet on ANGELS states that the scope of the mission is limited to the space around the Delta 4 rocket’s upper stage, and while we all know from experience how dangerous inert, non-maneuverable upper stages can be, if you believe the AF fact sheet, I have some swamp land in Florida I would like to discuss.
Seriously, however the GSSAP and ANGELS missions evolve, it is still nice to know that someone is reading what you write, even if it is 17 years later.
Until next time, happy navigating and sleep well, because ANGELS really do exist.
What Is Don Reading?
Obviously I have been reading ancient but still pertinent SAB reports but more importantly this week I also read and highly recommend you read and comment on the latest Federal Register notice for comment submitted by DOT concerning deployment of GPS CNAV messages. The DOT comments are actually a bit misleading as they infer this is an early or pre-operational deployment of CNAV messages and that is a bit of a misnomer. Under the original guidelines CNAV signals would have been broadcast back in 2003 but events prevailed to prevent that from happening. However, and this is an update to the numbers in the original Federal Register Notice, there are currently 12 GPS SVs on orbit capable of broadcasting civilian L2C CNAV signals and military code or MNAV messages. Additionally there are five GPS satellites (IIFs) on orbit capable of broadcasting L5 safety of life signals for DOT.
Frankly, the DOT objects to these signals being broadcast now for, in my humble opinion, very nebulous reasons, and the USAF is working hard to and has, again in my opinion, negated all of the DOTs concerns. So please just take a couple of minutes and go to the Federal Register site and let them know how badly we need these new signals.
Hopefully, you read my February column affirming GPS as the reigning PNT Gold Standard. In order to maintain that status and indeed to continually exceed the capabilities of any of the current or planned PNT systems in existence today, the GPS needs these new signals. I predict CNAV and MNAV messaging capabilities will revolutionize the way PNT signals are utilized. These new signals bring about a capability heretofore unknown in the PNT arena. Just think about this, each CNAV and MNAV signal has the ability to broadcast 256 separate and definable messages to users globally. With 12 CNAV satellites on orbit today, global accessibility tests have shown that for the majority of users this means at least one CNAV SV in view at all times and you only need one CNAV SV in view to take advantage of the messaging capabilities. So the sooner the better I say. I don’t have the room to say much more than that this month but just imagine the possibilities. Please log onto the Federal Register site and let your opinion be heard.
I recently was involved in a project outside of the United States. Part of the project involved setting up a couple of RTK base stations. Of course, I wanted the antenna surveyed with reasonable accuracy with respect to ITRF. Even though supporting OPUS outside of the U.S. is out of the scope of the NGS mission (I assume), it works the same outside of the U.S. as it does within the U.S. Ok, somewhat the same.
As you imagine, the network of GPS reference stations outside of the U.S. is not nearly as dense as within the U.S., so you can remove OPUS-RS from the discussion immediately. OPUS-RS only requires a minimum of 15 minutes of data, but there must be three GPS reference stations within 250 km that form a polygon around your occupation point. Obviously, in many parts of the world, you aren’t going to be in a location that meets those specifications. Those requirements can be difficult to meet even in the United States. I recall a project on the West Coast where I had plenty of GPS reference stations within 250 km, but because I was near the Pacific Ocean, I wasn’t within the polygon of three GPS reference stations that OPUS-RS could find.
Back to my ex-U.S. project. With OPUS-RS being out of the consideration, OPUS-S was my choice. What you may not know is that OPUS doesn’t just look at CORS inside the U.S. when post-processing GPS data. It also looks at IGS Stations, which are located all over the world. Granted, I knew the distance to the GPS reference stations would be long, perhaps many hundreds of kilometers to each one, so I planned for long occupation times. This was easy because I was setting up high-quality (choke-ring) permanent antennas on building roofs. I set the GPS receiver to log data overnight at 15-second intervals.
I apologize ahead of time for needing to hide some of the data in order to preserve the privacy of my client, but you can try this same exercise on data you collect, or grab data from an IGS station and chop it into smaller pieces to process.
I logged data for about seven hours. Of course, I had ants in my pants, so I didn’t wait for the rapid orbits (used ultra-rapid), but knew I could reprocess at a later date and use rapid and precise orbits. Here’s what I got:
SOFTWARE: page5 1209.04 master51.pl 072313 START: 2014/01/30 13:49:00
EPHEMERIS: igu17774.eph [ultra-rapid] STOP: 2014/01/30 20:59:30
NAV FILE: brdc0300.14n OBS USED: 3219 / 10519 : 31%
ANT NAME: NONE NONE # FIXED AMB: 39 / 56 : 70%
ARP HEIGHT: 0.0001 OVERALL RMS: 0.015(m)
REF FRAME: IGS08 (EPOCH:2014.0814)
X: xxxxxxx.203(m) 0.396(m)
Y: xxxxxxx.943(m) 0.287(m)
Z: xxxxxxx.554(m) 0.173(m)
LAT: xx xx xx.xxxxx 0.122(m)
E LON: xxx xx xx.xxxxx 0.470(m)
W LON: xx xx xx.xxxxx 0.470(m)
EL HGT: 387.047(m) 0.212(m)
BASE STATIONS USED
PID DISTANCE(m)
xxxxxx 3125832.0
xxxxxx 3743350.2
xxxxxx 3756756.5
Not bad, considering the monster baselines. Yes, that’s 3+ million meters.
I ran the same data set later with better orbits available, as well as more GPS reference data became available.
Wow, the baselines sure improved, and that’s reflected in the solution. That’s because the GPS reference data isn’t immediately accessible from some IGS Stations. In the interest of privacy, I erased the Lat/Lon but kept the elevation. You can see the elevation difference between the two is about 20 cm. I assume it’s an improvement. For confirmation, I decided to run the same dataset through Australia’s AUSPOS online processing service.
X: xxxxxx3.390(m) 0.008(m)
Y: xxxxxx1.676(m) 0.006(m)
Z: xxxxxx9.405(m) 0022(m)
LAT: xxx xx xx.xxxxx
E LON: xxx xx xx.xxxxx
W LON: xxx xx xx.xxxxx
EL HGT: 386.822(m)
The results were comparable to the OPUS solution, differing by 0.7cm in X, 0.08cm in Y and 2.9cm in Z.
AUSPOS used substantially more GPS reference stations (14 total) than OPUS:
STATION, Positional uncertainties (95%) for X, Y, Z (in meters)
Baseline distances ranged from 341 km to 3,700 km.
So, do I believe the OPUS solution or AUSPOS solution? I split the difference at the time. However, I set up the GPS reference stations in such a way that I can access them remotely and log data at any time from my laptop computer, so I’m running a series of eight-hour (or whatever in convenient) occupations and processing them through both services. So yes, OPUS is an international service (shsh, don’t let the bureaucrats and politicians know).