A roundup of recent products in the GNSS and inertial positioning industry from the September 2022 issue of GPS World magazine.
OEM
Receiver Upgrade
OSNMA anti-spoofing tech now on PolaRx5 GNSS reference receivers

Open Service Navigation Message Authentication (OSNMA) is now available on the high-end PolaRx5 reference receiver series. OSNMA offers end-to-end authentication on Galileo’s civilian signals, protecting receivers from GNSS spoofing attacks. OSNMA adds another layer of security to the receivers’ existing AIM+ anti-jamming and anti-spoofing technology. The PolaRx5 product range also now supports RINEX format versions 3.05 and 4.0.
Septentrio, septentrio.com
Anti-Jam Antennas
Developed with the United States military
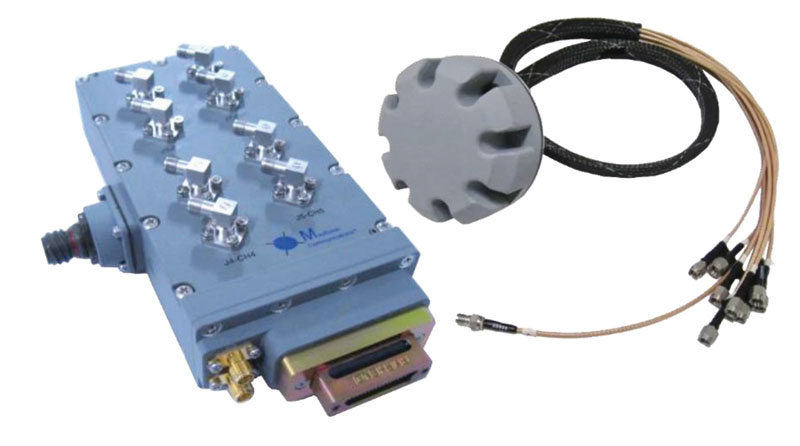
The MAGNA-F and MAGNA-I GPS anti-jam antennas provide simultaneous L1/L2 protection and can protect commercial and military GPS receivers on aircraft. The MAGNA products were developed with sponsorship by the U.S. Navy and further improved by the U.S. Army to support GPS protection requirements for air, sea and ground platforms, such as fixed-wing/rotary aircraft, ships, UAVs and tactical vehicles. The MAGNA-F uses a 3.5-inch-diameter controlled reception pattern antenna (CRPA) compatible with existing fixed radiation pattern antenna (FRPA) footprints. The MAGNA-I (NavGuard 730) is a high-performance yet small GPS anti-jam integrated solution with a 4.5-inch diameter FRPA-compatible footprint.
Mayflower Communications, mayflowercom.com
Single-board computer
Centimeter-level GNSS for mass-market applications
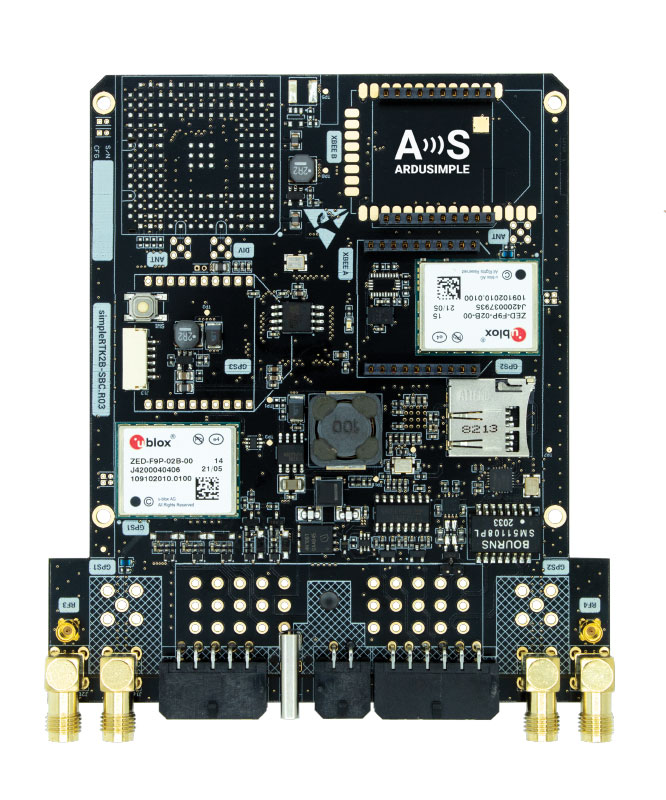
The SimpleRTK2B single-board computer (SBC) is built around up to three u-blox ZED-F9P high-precision GNSS receivers. It simplifies development of centimeter-level positioning solutions supporting real-time kinematics (RTK), making the technology accessible to broader audiences. The SimpleRTK2B-SBC was developed to make RTK technology as close to plug-and-play as possible. In addition to working as a stand-alone solution, customers can program their own applications with the company’s microPython API. The SimpleRTK2B-SBC delivers mechanical integration with centimeter position on three axes (heading, pitch and roll), outputting on NMEA, RTCM, RS232 and CANBus interfaces via Ethernet, Bluetooth, Wi-Fi and 2G/3G/4G communication. It offers configurable input/output and an inertial measurement unit.
u-blox, u-blox.com; ArduSimple, ardusimple.com
Optical cesium clock
For assured positioning, navigation and timing (PNT)

The OSA 3300-HP is a high-performance optical cesium clock with a 10-year lifetime compared to the five-year lifetimes of high-performance magnetic clocks. It provides the resilience required for PNT assurance in critical infrastructure and empowers service providers to deliver differentiated service-level-agreement timing offerings with integrated GNSS backup. The OSA 3300-HP has embedded Ethernet- and IP-based management as well as a user-friendly touchscreen graphical user interface.
ADVA, adva.com
Vehicle Navigation System
With M-Code capabilities and upgrade paths for other GNSS systems

NavHub-200M is a vehicle navigation system for the international market with military code (M-code) receiver capabilities. NavHub-200M provides assured positioning, navigation and timing (APNT) while improving overall resistance to threats to GPS, such as jamming and spoofing. Its message formats and signal modulation techniques ensure faster and more accurate performance for ground vehicles on the connected battlespace, while advanced security features prevent unauthorized access or exploitation. NavHub-200M also includes the open interface standards and sensor-fusion capabilities required for a GNSS upgrade path, such as that for Europe’s Galileo constellation, as well as the ability to interface with key vehicle sensors such as the inertial measurement unit (IMU) and odometer.
Collins Aerospace, collinsaerospace.com
MAPPING
Mapping Handheld
High-performance data collector
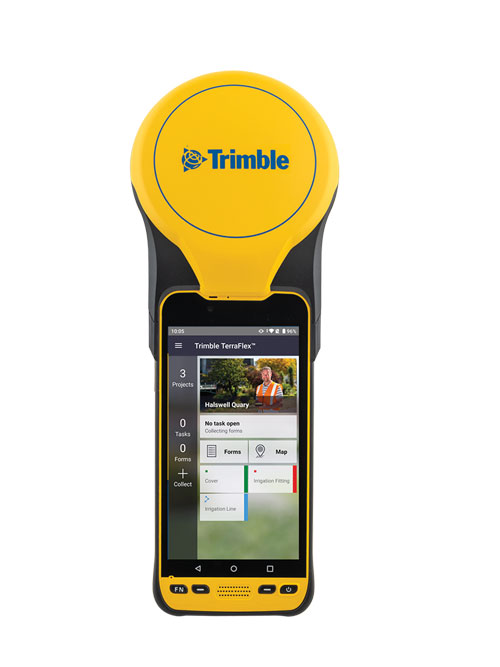
The Trimble TDC650 handheld is built for data collection, inspection and asset management activities. The rugged solution provides scalable high-accuracy GNSS positioning for professional field workflows, including apps such as Esri ArcGIS Field Maps and Trimble TerraFlex software. The TDC650 is scalable, allowing customers to choose their desired accuracy down to the centimeter level.
Trimble, trimble.com
Lidar Scanner
Powerful solution for manned and unmanned aircraft

The Voyager long-range lidar scanner has a wide field of view, with all points collected oriented toward the ground so there is no loss of points. In all, 1.5 million points per second will be usable. Voyager combines a Riegl VUX-120 laser scanner with a Trimble Applanix AP+ 50 AIR or Applanix AP+ 30 AIR GNSS-inertial board, providing a precision of 0.5 cm and an accuracy of 1 cm. Voyager’s detection and processing of up to 15 target echoes per laser pulse allows for excellent vegetation penetration. It has an extremely fast data-acquisition rate of up to 1,800 kHz, suitable for projects requiring the highest point density. The laser scanner’s specifications can be customized and can be combined with YellowScan’s software solutions.
YellowScan, yellowscan-lidar.com
ArcGIS Pro Add-In
Extends 3D Tiles Next workflow into Esri ArcGIS Pro
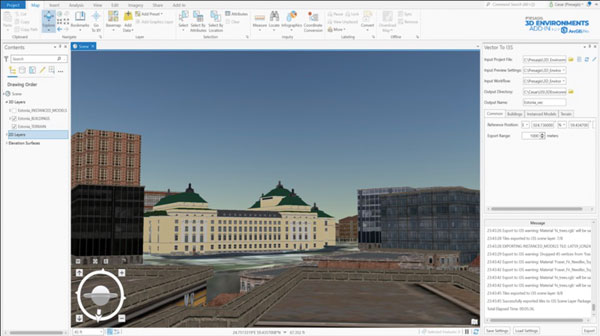
The 3D Environments Add-In application for Esri ArcGIS Pro allows ArcGIS users to rapidly transform 3D Tiles Next data formats, such as One World Terrain, into ArcGIS Pro projects to create 3D scenes from 2D vector data and 3D models. The add-in leverages Presagis’ building templates and texture libraries that analysts use to create enhanced 3D visualizations of GIS environments, helping increase collaboration across the enterprise. The 3D Environments Add-In contains tools to create, transform and extract a wide variety of 3D formats to provide seamless interoperability between ArcGIS Pro and modeling and simulation applications. It is available on the Esri ArcGIS Marketplace.
Presagis, presagis.com
Cloud-Based GIS
Energy performance data helps tackle climate change

Municipal geographic information system XMAP can now incorporate the energy-performance ratings of individual properties to help local authorities tackle climate change, improve housing standards, and ensure landlords comply with legislation. The Energy Performance Certificate (EPC) data layer uses a rating system similar to the one used on new appliances, ranging from A (very efficient) to G (inefficient). It allows tenants and house buyers to make informed decisions. In addition to a color-coded visualization of current ratings, the XMAP EPC layer contains enhanced analysis including generalized ratings and the potential for improvement. Bath and North East Somerset Council, UK (pictured), has embraced this resource and is looking at how the data can be used to raise housing standards.
XMAP, xmap.geoxphere.com
Caged Drone
For mapping and inspection in dangerous areas

The Elios 3 is a collision-tolerant drone equipped with a lidar sensor for indoor 3D mapping. The drone is powered by a new SLAM engine called FlyAware that lets it create 3D models as it flies. It also hosts a new version of Flyability’s software for inspectors, Inspector 4.0. The Elios 3 comes with an Ouster OS0-32 lidar sensor, allowing inspectors to collect data for the creation of survey-grade 3D models using Connect software from Flyability’s partner GeoSLAM. Protected by a cage, the Elios 3 has advanced collision-tolerance features that allow inspectors to fly it inside dangerous confined spaces such as boilers, pressure vessels and mines.
Flyability, flyability.com
SURVEYING
Data Collector
Ergonomic yet rugged for fieldwork

The R60 is a powerful handheld with an ergonomic design. It runs on Android 12 OS, providing a suitable workhorse for surveying professionals in the field. Survey Master field software works seamlessly on the R60, which features a Qualcomm 8-core processor for massive data processing. Its 64-GB memory allows ample data storage and enables the opening of CAD drawings in seconds. Other features include a QWERTY keyboard, a 5.5-inch sunlight-readable high-resolution screen, an IP67 rating (dustproof and waterproof), and a 9,000 mA Li-ion battery for more than 30 hours of continuous functioning.
ComNav Technology, comnavtech.com
Base Station
Mobile station provides cm positioning

The Mobile Centimeter (MobileCM) Space Weather Station is a ready-to-use GNSS device that will act as a real-time kinematic (RTK) base station and collect space weather data. The device is pre-configured to securely connect with the Global Earth Observation Decentralized Network (GEODNET) using a home Wi-Fi network. The full four-constellation GNSS base station has built-in NTRIP server functionality and is packaged with a survey-grade triple-band roof antenna and required cables.
HYFIX, hyfix.ai
MACHINE CONTROL
Guidance System
Upgradeable for precision agriculture

The SAgro10 GNSS guidance system is an entry-level guidance system for precision agriculture, providing users with higher navigation precision and higher productivity, which can be upgraded to an automatic steering system. Embedded with a high-precision GNSS module, the SAgro10 system tracks all four global constellations. For users with network coverage or a UHF base station, the system provides centimeter-level accuracy navigation in real-time kinematic mode. In the absence of base stations, the SAgro10 system provides sub-meter navigation accuracy in single-point smoothing mode. Compatible with most agricultural tractors, its components can be installed within 15 minutes. The 10-inch sunlight-readable touchscreen has a clear and simple graphic interface.
SingularXYZ, singularxyz.com
Excavator Guidance
Brings 3D mapping to small sites

iDig 3D Connect is a solar-powered excavator guidance system with a GNSS receiver that can be removed and used as a rover, rather than permanently installed on the machine. 3D excavator guidance has seldom been used for small projects such as house foundations because of the need for a surveyor to stake out points and map a site. The removable receiver enables contractors to complete these tasks. The software provided creates a GNSS-generated site map, enabling precision digging relative to the area and making the process quicker, simpler and more eco-friendly than with 2D.
iDig, idig-system.com
MOBILE
Asset Tracking
Cloud-based service uses GNSS and Wi-Fi
The Cloud Locator service takes data from LoRa Edge-enabled devices and uses Semtech’s LoRa Cloud Geolocation and Modem services for asset tracking both indoors and outdoors. It features built-in serverless technology and enables testing of ultra-low-power asset tracking on either a private or public LoRaWAN network. It is designed to work with trackers using Semtech’s LoRa Edge LR-series chips. The LR-series chips combine Wi-Fi and GNSS to obtain the latitude and longitude of devices in any indoor or outdoor location. Once configured on the service, together with Semtech’s LoRa wireless radio frequency technology for transmission to the cloud, customers can view the tracker location on a map in less than 15 minutes.
Semtech, semtech.com & locator.loracloud.com
Bike Computer
Features multi-band GNSS receiver
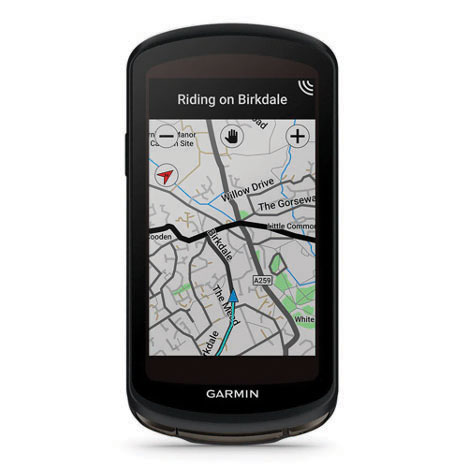
The Edge 1040 bike computer features solar charging and multi-band GNSS technology. Its multi-band GNSS receiver (GPS, GLONASS and Galileo) provides accurate positioning in challenging ride environments, such as dense urban areas or under deep tree cover. Advanced navigational tools help cyclists stay on track, such as turn-by-turn navigation and alerts that notify riders of sharp curves ahead. Route guidance and off-course notifications can be paused for exploring and turned back on for return to the original route. When using the Trailforks app, Forksight mode automatically displays upcoming forks in the route and where a rider is within a trail network.
Garmin, garmin.com
SIMULATORS
Simulator Upgrade
Features advanced hardware-in-the-loop testing

Skydel 22.5 is a significant software upgrade to the Skydel simulation product line. It features advanced hardware-in-the-loop (HIL) testing solutions providing very low to zero effective latency. Enhanced visualization tools can monitor internal latency through real-time curves showing when the data is generated and sent to the RF signal. Users can also review the transmission of HIL packets for optimizing the entire network’s latency, checking its stability (jitter), and that data is available and used at the right time in Skydel. HIL testing is an essential step in the verification process of the model-based design approach because it involves all the hardware and software that will be used operationally.
Orolia, orolia.com
Synchronizer and Simulator
Contained in an easily deployable suitcase

The Time-Loader is designed for defense and mission-critical applications, for deployment in environments where GNSS signals are denied or disrupted. It supports any ground, naval or airborne system that needs real time of day (TOD) and 1PPS external synchronization aligned to the UTC or GNSS. It generates a GPS L1 C/A code RF output as if the signal were coming from a live-sky GPS antenna. It provides full-constellation GPS output and is compatible with external GNSS receivers. Its GPS-disciplined oscillator (GPSDO) is the Microsemi MAC-SA53/55, which provides excellent UTC accuracy with outstanding hold-over rubidium clock performance. A self-contained, miniature GPS simulator provides real-time extremely accurate signals. The 18-channel full-constellation simulator stores location/time/date data in internal memory and stores complex vector data to simulate dynamic scenarios. The simulator also can be used to transcode NMEA or SCPI position/ velocity/time (PVT) data into GPS RF signals.
Focus Telecom, focus-telecom.com