“This partnership draws on the strengths of both organizations,” said GPSIA Executive Director Lisa Dyer. “Positioning and navigation are critical to today’s automotive industry and the millions of workers and families who depend on vehicles for work, to transport their loved ones and to connect with the world around them. Future positioning and navigation satellite systems operated from low-Earth orbit will be key enablers for connected vehicles.”
GPSIA’s network now includes 13 national organizations and industry leaders, such as John Deere, Garmin, Trimble, Apple, Lockheed Martin and TrustPoint. The Alliance for Automotive Innovation brings deep expertise in the automotive sector and a strong commitment to advancing safer, smarter personal transportation technology. This addition aims to strengthen GPSIA’s commitment to fostering innovation, creativity, and entrepreneurship in GNSS and related space-based position, navigation and timing (PNT) technologies.
The Directorate of Defense Trade Controls (DDTC) has changed the regulatory status of Controlled Reception Pattern Antennas (CRPAs) for position, navigation and timing (PNT). Starting September 2025, CRPAs will no longer be subject to the International Traffic in Arms Regulations (ITAR). Instead, they will be reclassified under the less restrictive Export Administration Regulations (EAR) list, which is under the jurisdiction of the Department of Commerce.
The rule, in part, removes items from the U.S. Munitions List (USML) “that no longer warrant inclusion.” According to the rule, “certain anti-jam antennas no longer provide a critical military advantage, with increasing commercial utilization applicable to civil GPS resiliency.” By removing CRPAs for PNT, “the Department intends to facilitate civil global navigation system resiliency.”
The recent regulatory change is expected to significantly impact several industries, including airlines, autonomous vehicles, UAVs and critical infrastructure applications, which can benefit from the increased availability of CRPAs. Additionally, this change may open the U.S. market for CRPA manufacturing, potentially resulting in swift technological advancements and lower costs.
The importance of CRPAs lies in their ability to protect GNSS receivers from interference and jamming. GNSS signals are inherently weak and susceptible to both deliberate and unintentional interference. CRPAs work by adjusting their reception pattern to create nulls in the direction of interfering signals while maintaining reception from desired satellite signals. This adaptive beam steering capability allows CRPAs to effectively eliminate signals from particular directions while preserving signals from others, making them a powerful tool in ensuring the reliability of GNSS-dependent systems.
Mapbox and Hyundai AutoEver, a software affiliate of Hyundai Motor Group, have developed an integrated AI-driven 3D navigation system with advanced driver-assistance (ADAS) capabilities. This system, powered by Mapbox 3D Live Navigation and MapGPT, operates on Hyundai Mobis’ cockpit domain controller.
The Mapbox 3D Live Navigation system offers 3D lane-level guidance, augmented reality overlays and real-time driver assistance. It integrates Mapbox’s navigation technology with Hyundai AutoEver’s software-defined vehicle platform and Hyundai Mobis’ AR-enabled cockpit domain controller. This integration provides drivers with turn-by-turn navigation enhanced by ADAS alerts, including collision warnings and lane departure notifications.
MapGPT, an AI-powered location assistant, complements the navigation system. It facilitates voice-driven interactions for dynamic routing, real-time traffic updates and hyper-local search. The system also allows voice-activated controls for in-car functions such as climate control and music. For electric vehicles, MapGPT includes features such as real-time range monitoring and charging station recommendations.
At CES 2025, Mapbox and Hyundai AutoEver will demonstrate these technologies, showcasing features such as lane-level AR navigation, voice-controlled systems and electronic vehicle-specific tools.
HERE Technologies and Amazon Web Services (AWS) have entered a cloud infrastructure agreement aimed at advancing the development of software-defined vehicles (SDVs). This partnership combines HERE’s mapping solutions with AWS technologies to accelerate the creation of advanced driver assistance systems (ADAS), automated driving (AD) and new digital car experiences.
The collaboration leverages HERE’s expertise in location technology and AWS’s cloud capabilities to address the growing importance of live mapping in modern vehicles. These data-intensive operations can now be supported and scaled more efficiently using AWS, potentially reducing development times and accelerating innovation in the automotive industry.
HERE has been utilizing AWS for its core cloud infrastructure, data platform and AI/ML model deployment for nearly a decade. This expanded collaboration allows HERE to offer automakers a comprehensive set of cloud-native tools and technologies, enhancing various aspects of vehicle functionality, from improved active safety features to optimized infotainment systems.
Key developments
A key development from this partnership is SceneXtract, a solution that streamlines the process of creating simulation-ready scenes for testing ADAS and AD systems. By combining HERE HD Live Map data with AWS’s natural language processing and generative AI services, automotive developers can more efficiently prepare simulations, potentially accelerating the development and deployment of advanced driving technologies.
Beyond the automotive sector, HERE and AWS are collaborating on transportation and logistics solutions. These new offerings, built on AWS infrastructure, aim to help enterprise customers optimize fulfillment, improve supply chain visibility, and support sustainability goals.
Containers, stillages, trailers or reusable transport packaging — non-powered assets such as these play a central role in smooth supply chains and logistics processes. For a long time, however, non-powered assets could hardly be digitized due to a lack of sufficient battery life, thus eluding efficient management.
To plan and control logistical processes and supply chains, companies usually needed a large buffer/reserve stock and sometimes a lot of telephone/administrative work to determine the exact location and condition of such assets. Thanks to power-saving Internet of Things and wireless technology paired with high-performance sensors for environmental conditions and intelligent firmware, sufficiently robust trackers are now available for efficient use in the mass market.
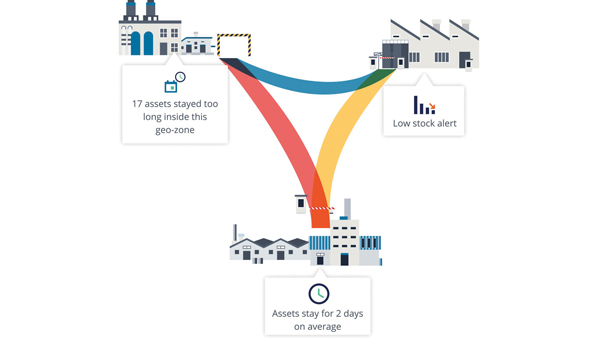
Figure 1: Integrated modeling tools help to model and track the flow of assets across operations and locations.
The basics: Thousands of tracker data at a glance
In order for companies to derive real benefits for their business from pure tracking, they need a management platform that can do more than display the trackers on a map. Depending on the requirements, tracking hardware can be equipped with sensors for temperature, humidity or tipping movements, for example.
A management platform must then ensure that the multitude of trackers can be efficiently commissioned and administered and that their collected data is made available for use. After all, large amounts of data are only valuable if important insights can be gained quickly and intuitively. The tracking application, therefore, needs powerful search and filter functions and visually meaningful maps, dashboards and panels.
Integration into existing systems
However, for the data collected via tracking to fully benefit the company’s supply chains and logistics processes, it needs to be integrated into the company’s existing IT systems, such as ERP systems or tools for data analysis and business intelligence.
The data exchanges between the business applications can be useful in both directions: on the one hand, precise localization and sensor data from the tracking platform enrich reliable enterprise resource planning via the ERP system; on the other hand, it can be helpful to make data from the ERP system available to the tracker management platform — for example, to evaluate the utilization of a trailer or to simply display the contents of a container via a mobile app on-site.
Technically, such data exchange can be realized through open APIs (application programming interfaces), which such a management platform should have. This enables the professional implementation of system integrations that are needed in the business IT of many companies — for example with SAP, Microsoft Azure or AWS.
Designing/modeling process flows and making route patterns transparent
In order for companies to make their own processes around tracked assets transparent, a management platform needs tools that can be used to model and track the flow of assets across the different processes and, if applicable, locations (see Figure 1). Also important for this is the ability to define specific geographic areas of interest. Such geo-zones can then be used for inventory management, flow analysis or alerts. The mapping of load carriers or other assets to companies’ logistical processes and supply chains provides an accurate overview of how individual assets move from location to location, where they stop and for how long.
Based on the collected data, route patterns and travel times can be identified, rotation statistics with average and outlier analyses can be created (see Figure 2), and finally, planning and forecasts can be adjusted based on measured historical data. For appropriate visualization and evaluation, the tracking platform should provide the appropriate tools. This way, statistics can be generated for thousands of assets and/or an entire fleet, which can serve as a basis for further process optimization.
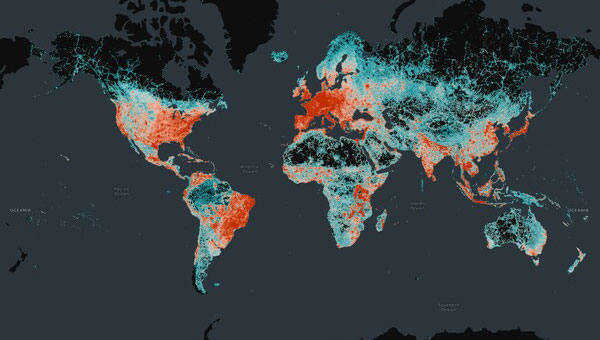
Figure 2: With a high-performance tracker management system, route patterns and travel times can be detected, and rotation statistics can be generated so that averages and anomalies can be identified.
Airbus example
Airbus develops, manufactures and delivers aerospace products, services and solutions worldwide, with more than 50,000 dedicated returnable transport packages circulating between sites and subcontractors. Thousands of returnable transport packages have been equipped with trackers and managed via a cloud-based platform over the past years. Airbus therefore benefits today from complete transparency. Inventory runs automatically, and stocks can be easily retrieved with their locations. The rotation capability of the packages has been improved, while their storage times and the circulating stocks have been reduced. Fleet capacity can also now be optimized, spare parts costs saved and subcontractor compliance better monitored.
The advantages at a glance
Precise inventory management of all mobile assets, from containers to returnable transport packaging to construction machinery.
Reliable condition monitoring: Continuous monitoring of environmental conditions such as temperature and humidity creates transparency — e.g., for compliance agreements.
Optimal process flows: Route patterns and turnaround times become transparent and anomalies easily identifiable, so that warnings can be sent in time and processes optimized overall.
Utilization monitoring: The utilization of each load carrier and each asset in a fleet can be precisely determined and optimized.
Predictive maintenance: Thanks to continuous monitoring, the maintenance of monitored assets can be planned and carried out in advance — before a breakdown interrupts important business processes.
Protection against theft: Lost or stolen assets can be easily recovered, so that financial damage can be minimized, especially in the case of expensive specialized assets.
Honeywell and NXP Semiconductors have expanded their partnership to advance aviation technology and autonomous flight capabilities. This collaboration merges Honeywell’s aerospace expertise and Anthem avionics system with NXP’s high-performance computing architecture to develop AI-driven aerospace technologies.
The partnership aims to enhance operational efficiency in flight planning and management while facilitating smoother transitions to new chipsets and technologies. The companies will focus on developing next-generation cockpit displays with improved visual clarity and system efficiency. They are also working on simplifying migrations to newer avionics technologies and extending the lifecycles of critical aviation systems, according to Honeywell and NXP.
NXP’s domain-based architecture, which includes high-compute capabilities, integrated cybersecurity and functional safety, will be adapted for aviation applications on Honeywell Anthem, the industry’s first cloud-connected cockpit system. This builds upon the companies’ collaboration in building management, fire safety and security products.
For aerospace applications, Honeywell will utilize various NXP processors, including the i.MX 8 applications processors and S32N super-integration processors. These processors will enable Honeywell Anthem to deliver faster data processing for real-time AI-driven insights, potentially enhancing safety and optimizing performance both in flight and on the ground.
Vertical Aerospace, a leader in electric vertical take-off and landing aircraft development, is set to be an early adopter of this collaborative technology, incorporating it into its piloted VX4 prototype aircraft.
Swift Navigation and Quectel Wireless Solutions have partnered to enhance GNSS accuracy across various industries. This collaboration integrates Swift’s Skylark Precise Positioning Service with Quectel’s high-precision GNSS modules.
Skylark, a cloud-based GNSS corrections service, is designed to improve standard GNSS accuracy from several meters to a few centimeters. It utilizes advanced atmospheric modeling and a carrier-grade network to provide reliable, scalable, and high-integrity precision.
The partnership offers three Skylark variants: Skylark Cx , Skylark Nx RTK and Skylark Dx. Each variant is tailored to meet specific industry requirements and can be paired with Quectel’s GNSS modules for various applications.
Integration and Applications
Automotive: Quectel’s LG69T module with integrated inertial measurement units combined with Skylark Cx offers lane-level accuracy for intelligent driving systems.
Outdoor Robotics: The LG290P module paired with Skylark Nx RTK offers centimeter-level accuracy for autonomous robots such as robotic lawnmowers.
Micromobility: Quectel’s LC29H module with Skylark Dx achieves decimeter-level accuracy for e-bikes and scooters in urban areas.
UAVs: The LG290P module with Skylark Nx RTK offers high accuracy for fast-moving UAV applications.
Quectel’s LG290P is a quad-band GNSS module designed to deliver high performance for demanding applications, ensuring RTK availability and quality even in challenging environments. When paired with Skylark Nx RTK, the LG290P achieves the centimeter-level accuracy needed to ensure the precision required for applications such as precision agriculture, robotic lawnmowers, surveying and personal robots.
The LC29H module is a dual-band multi-constellation solution with optional dead-reckoning capabilities that supports seamless integration with all Skylark variants and comes in a standard 12.2mm × 16.0mm footprint. Developers can transition from standard positioning to high-precision GNSS without hardware changes while choosing the Skylark variant that meets their specific requirements.
The Overture Maps Foundation has released the general availability of its global transportation dataset. This dataset encompasses 86 million km of roads worldwide and is designed to support various industries, including automotive, logistics, navigation, urban planning and humanitarian response.
The transportation dataset incorporates detailed information from multiple sources:
Aerial imagery for accurate road representations
Clear road routes with recognizable highway signs
Comprehensive rail and ferry route information
Complex traffic rules and restrictions
Building upon OpenStreetMap data, Overture has re-engineered the data structure to create a more stable dataset with a documented schema, the company said.
Data enhancements
Overture has implemented several improvements to the OSM data, including:
Normalization: The dataset adheres to a standard set of attributes, ensuring uniformity across features such as right turns and speed limits. This seeks to facilitate simplified analysis, interpretation and use of the data.
Global Entity Reference System (GERS): Overture has introduced unique identifiers through a linear reference system. This allows users to attach external data, such as accident reports or road construction updates, to specific road segments with precise location information.
According to Overture, the transportation dataset will undergo continuous updates and improvements. Future enhancements will leverage artificial intelligence and other open data sources to maintain and expand the dataset’s accuracy and completeness.
Swift Navigation has collaborated with CHC Navigation (CHCNAV) to integrate Swift’s Skylark Precise Positioning Service with CHC Navigation’s GNSS receivers.
Skylark is a cloud-based GNSS corrections service designed to improve the accuracy of standard GNSS from several meters to a few centimeters. Built to meet stringent standards for automotive safety (ISO 26262), Skylark supports more than 10 million advanced driver-assistance systems (ADAS)-enabled and autonomous vehicles globally. It can be used in a variety of applications, such as autonomous vehicles, robotics and surveying equipment.
Example integration
The CHC CGI-220 Pro is a high-precision, automotive-grade GNSS/INS tightly coupled navigation system designed for applications requiring robust and accurate positioning, such as autonomous driving, ADAS and intelligent transportation systems. When integrated with Skylark, the CGI-220 Pro offers:
Centimeter-level accuracy: Skylark enhances the CGI-220 Pro’s precision, delivering reliable, real-time positioning even in challenging environments.
Seamless integration: The CGI-220 Pro’s compact design and compatibility with various vehicle systems allows for straightforward integration into automotive platforms.
High reliability: Engineered to meet stringent automotive standards, the CGI-220 Pro offers consistent performance under demanding conditions.
The automotive navigation of tomorrow is highly connected and capable of dynamically using high-resolution map information and vehicle and environmental data from the cloud. It is an enabler for powerful driver assistance, intelligent e-mobility and autonomous driving. As a global provider of software engineering services for the mobility industry, Intellias is involved in many of these developments.
Although obtaining mapping and navigation data is easier today than it was 10 years ago — thanks to dashcams, UAVs and satellites — collecting this data is still labor-intensive. Even if most corners of the world are already recorded in public and private geographic information systems (GIS), the maps still need to be maintained regularly. Data accuracy and timeliness are the two biggest challenges in the mobility industry, followed by coverage, as the physical world is constantly evolving. To meet these requirements, the evolution of navigation and digital mapping is gathering pace. The following six technology and deployment trends will drive automotive mapping and navigation in the coming years.
1. Enriching Mapping Data With AI
Satellite imagery was a breakthrough for map creation. The wrinkle, however, is that most mapping software cannot work directly with satellite photos. Visual data first needs to be codified into comprehensive navigation datasets in a suitable format such as the Navigation Data Standard (NDS). Then map owners must keep it up to date. Both processes are costly and labor-intensive, making them great use cases for artificial intelligence (AI) in mapping.
AI algorithms improve the speed and precision of digital map building by offering the ability to update maps more regularly and map new areas faster. They can classify objects in satellite images — buildings, roads, vegetation — to create enriched 2D digital maps as well as multi-layer 3D map models. With precise maps, you can delight users with better ETAs, detailed fuel or energy usage estimates, and richer point-of-interest information.
Apart from facilitating the collection of mapping data, AI can also help with generating such data. Researchers from MIT and the Qatar Computing Research Institute (QCRI) recently released RoadTagger. This neural network can automatically predict the road type (residential or highway) and number of lanes even with visual obstructions present, such as a tree or building. The model was tested on occluded roads from digital maps of 20 U.S. cities. It correctly predicted the number of lanes with 77% accuracy and predicted road types with 93% accuracy.
That said, sensor data collection from connected vehicles isn’t going anywhere. OEMs are increasingly relying on their fleets to collect new insights for digital map creation, and this process is becoming easier with advances in machine learning. HERE Technologies recently presented UniMap — a new AI-driven technology for faster sensor data processing and map creation. The new solution can effectively extract map features in 2D and 3D formats, then combine them with earlier map versions. This unified map content data model allows new digital maps to be available in 24 hours.
Photo: Intellias
2. NDS.Live: From offline databases to distributed map data systems
Conventional onboard navigation systems are designed, developed and integrated with proprietary databases, which become obsolete with every new product generation. NDS.Live is the new global standard for map data in the automotive ecosystem, promoting the transition from offline to hybrid/online navigation. It minimizes the complexities of supporting different data models, storage formats, interfaces and protocols with one flexible specification. NDS.Live is not a database, but a distributed map data system.
NDS.Live was co-developed by global OEMs and tech leaders, including Intellias, Daimler, HERE, Denso, Renault and TomTom are among those who have already adopted it. For example, second-generation Mercedes-Benz User Experience (MBUX) systems are powered by NDS.Live. The distributed map data system provides fresh information for the driver assistance system, which gets visualized as augmented reality (AR) instructions on the head-up display (HUD). NDS.Live can help massively improve the navigation experience for EVs and regular connected vehicles. It also helps OEMs deploy value-added subscriptions for assisted driving and navigation.
3. 3D and HD map generation
3D maps enable accurate rendering of physical objects in a three-dimensional form. High-definition (HD) maps feature detailed information about road features (lane placements, road boundaries) and terrain type (severity of curves, gradient of the road surface). Both types of maps are essential for launching advanced ADAS features and, ultimately, ushering in the era of autonomous driving.
3D maps define how the vehicle moves and help it interpret the data it receives from onboard sensors. Since most sensors have a limited range, HD maps assist by providing the navigation system with extra information on road features, terrain and other traffic-relevant objects.
The bottleneck of both HD and 3D mapping is collecting and rendering data. In the case of 3D maps, you need to capture video in real time from multiple cameras, plan for interference due to vibration, temperature and hardware issues, and then repeat the process across billions of kilometers of roads across the globe. Rather than doing this huge task alone, mobility players and OEMs join forces:
• HERE and Mobileye, for example, partnered to crowdsource HD mapping data collection, with VW joining later. Mobileye developed a compact, high-performance computer vision system-on-chip called EyeQ. Installed by more than 50 OEMs across 300 vehicle models, the system supplies Mobileye with ample visual data they can then render into maps with the help of partners.
• TomTom, in turn, teamed up with Qualcomm Technologies to crowdsource HD mapping insights from its users. Qualcomm provides the underlying cloud-based platform for making and maintaining HD maps from various sources, including swarms of connected vehicles.
Photo: Intellias
4. Autonomous driving simulations
Autonomous vehicles require extensive road and track tests to pass security checks. Manufacturers also need to simulate near-crash events without putting anyone in danger. Hyper-realistic virtual worlds can be much safer testbeds for autonomous vehicles (AVs) — especially as virtualization technology improves.
A group of researchers released an open-source, data-driven simulation engine for building photorealistic environments for AV training. The engine can simulate complex sensor types including 2D RGB cameras and 3D lidar, as well as generate dynamic scenarios with several vehicles present. With the new engine, users can simulate complex driving tasks such as overtaking and following.
Waymo takes a similar approach of using real-world data collected from vehicle cameras and sensors to create highly detailed virtual testbeds. The Waymo team has built virtual replicas of several intersections complete with identical dimensions, lanes, curbs and traffic lights. During simulations, Waymo algorithms can be trained to perform the most challenging interactions thousands of times, using the same or different driving conditions and different vehicles from its fleet.
To perfect the performance of the algorithm, the team uses a fuzzing technique. During training sessions, engineers alternate the speed of other vehicles, traffic light timing and the presence or absence of zig-zagging joggers and casual cyclists. Once the Waymo algorithm learns the trick of driving through a specific intersection with a flashing yellow arrow, the “skill” becomes part of the knowledge base, shared with every vehicle across the fleet.
The new generation of high-fidelity 3D environments can be built with data from different sensor types to effectively convey all details of the material world to the algorithm. Existing 3D visual databases already include realistic details for traffic signs, pavement markings and road textures. With machine learning and deep learning algorithms, complex ADAS/AD scenarios can simulate close to real-life conditions.
Photo: Intellias
5. Digital twins of road infrastructure
While OEMs leverage dashcam data collection for building better navigation systems, transportation managers use the same intelligence to digitize road infrastructure. A digital twin is an interactive, virtual representation of physical assets or systems such as a smart traffic light network or smart parking facilities. Powered by real-time data, digital twins of road infrastructure can enable advanced urban planning scenarios. This includes dynamic traffic light signal optimization to reduce congestion as well as prioritized public and service transport management and accurate traffic predictions to optimize planning, signage, construction work schedules, etc.
Low latency is crucial for autonomous driving. Yet 3D map generation on the edge requires substantial computing power. Moreover, vehicles cannot store all mapping data on their route and need to constantly receive over-the-air updates. A group of researchers has proposed placing compact map distribution devices on roadside edges to facilitate point cloud data (PCD) map delivery on the go. The results show that autonomous vehicles can perform self-localization while downloading PCD maps. This system allows autonomous vehicles to receive dynamic new maps for each new destination instead of storing tremendous data records onboard.
6. AR in HUD navigation products
The latest vehicles have an upgraded human-machine interface (HMI)design, featuring new hardware and software elements that allow for AR navigation. AR in HUDs can deliver all standard information from static displays (driving speed, status of the ADAS system, fuel or charge levels), alongside dynamic routing instructions, including information on traffic signs, speed limits, construction work alerts and ETAs.
Overall, AR navigation systems can help drivers make better decisions on the road. A recent comparative study found that drivers using AR-augmented HUDs made fewer errors and drove faster on average than those using conventional HUDs. Participants also rated AR HUD instructions as more useful and easier to understand.
The next advance in navigation will be holographic displays, offering AR instructions in 3D. Advances in lidar technologies already allow for projecting ultra-HD holographic representations of road objects in real time into the driver’s field of view. Such systems can enable shorter obstacle visualization times and reduce driving-related stress, according to Tech Explore.
Transportation continues to be a key application area for GNSS and related technologies — both directly, as with receivers on trains, and indirectly, as in airport construction. For this month’s cover story, I chose three transportation-related projects that showcase different aspects of this relationship:
The project to triple the size of the international airport in Lima, Peru, and transform it into the Jorge Chávez Airport City. I posed a few questions to Carlos Ruiz Miranda, chief surveyor at the Lima airport project with SACYR, a Madrid-based global concessions, engineering and infrastructure and services company that specializes in large-scale infrastructure projects.
A train safety project in Vélizy, France. I talked with Joel Korsakissok, president of Syntony GNSS, a French company, which partnered for this project with Hitachi Rail, a global company headquartered in London.
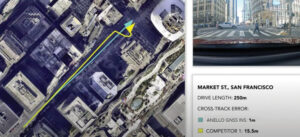
A navigation test on San Francisco’s Market Street using an INS-GNSS integration from ANELLO Photonics, which specializes in silicon photonics and sensory technology. I spoke to Kirstin Schauble, Ph.D., director of systems engineering.
Trimble: Peru builds South America’s first airport city
A construction worker at Lima’s airport uses a Trimble GNSS receiver and a TSC7 controller. Requirements included precisely positioning the bolts for more than 700 seismic isolators. (Photo: Trimble)
On April 3, 2023, the first commercial plane took off from a new 2.2 mile-long runway at the Jorge Chávez International Airport, in Lima, Peru, headed for Tarapoto with 140 passengers. That same day, a Peruvian Air Force jet was the first aircraft to land on the runway. Both aircraft were monitored from a new 213 ft.-high control tower with a 360° view of the airport.
The new infrastructure is part of a larger $2 billion project to triple the size of the airport, turning it into Jorge Chávez Airport City. Additionally, third-party investment for the construction will exceed $400 million in the first phase. The continent’s first such venture, it will enable Peru to become one of its principal aviation hubs. Spanning 2,310 acres, in addition to the new runway and control tower, it includes a 67-acre passenger terminal designed to handle about 40 million passengers a year.
Construction began in January 2022, and the expanded airport is scheduled to open in January 2025. It is a joint project of Lima Airport Partners — which operates more than 30 airports around the world — the Peruvian Ministry of Transportation and Communications, the Peruvian Airports and Commercial Aviation Corporation, and the aviation community in general, under the supervision of Ositran.
The modernization project’s scope and scale are matched by the means and methods used to build it. They include advanced surveying, grade control and coordination techniques in the field and about 2,700 active building information models (BIM) containing more than 50 miles of utilities that multiple contractors will construct. To fully synchronize the digital workflow between the field and the office, Ruiz led the transition from cloud-based collaboration software to a digital workflow. This improved coordination and productivity across departments and helped to keep the project on track.
The transition began by implementing a cloud-based common data environment (CDE), using Trimble Connect to provide a real-time, centralized collaboration platform for the construction crew, the field surveyors and the project’s managers. The CDE became a hub for managing data from field solutions, including laser scanners, UAVs, grade control systems, total stations, GNSS receivers and machine control systems on heavy earthmoving equipment.
A critical part of the terminal expansion is the airside airplane parking area around the terminal, which requires about 70,000 cubic meters of concrete and asphalt. The systems developed by the construction team enable the paving crew to achieve 10 mm accuracy, well below the 18 mm requirements.
Given the number of elements to this project in the terminal and surrounding areas, the SACYR survey team found that one of the best ways to facilitate the data flow between the office and the field is to use augmented reality (AR). “Initially, we tried using paper printouts to manually check for issues in the field. We tried Google Earth, but that was not satisfactory,” said Ruiz. Instead, SACYR turned to Trimble’s SiteVision AR software to provide real-time visualization of data, which improved decision-making and planning and reduced errors and costs.
Nearly 20 Trimble solutions were used in this project (see the sidebar), which helped to synchronize communication between field and office during construction, provided high accuracy results, and improved visualization and collaboration with the customer.
An aerial image shows the new terminal at Lima’s airport under construction. It will be able to handle up to 40 million passengers a year. (Photo: Trimble)
I asked Ruiz a few questions about the GNSS part of the project.
Q: What were the key challenges in surveying for this airport expansion project? Given the nature of the project and its location, multipath was probably not a problem. Also, the new runway and control tower were built away from existing air traffic, so that presumably was not a problem either.
A: The challenge has been organizing workflows between the field and the office. The location was not an issue for the project, but the limited space between the existing runway and the new one was. Nevertheless, it was not really an issue for construction.
Q: The airport will be the first one in South America to have seismic isolators to allow it to serve humanitarian flights following an earthquake. Did that pose any special challenges for surveyors?
A: Yes, it was a challenge for surveyors because there are more than 700 seismic isolators, and they each have anchor bolts that have precise tolerances to be embedded in the concrete. For this they used Trimble total stations.
Q: Did this project have any special requirements?
A: Special requirements were the precision of the seismic isolators, the precision of the plumbness of the columns and beams, and the precision of the leveling of the concrete of the parking spaces and the asphalt for the aircraft.
Q: What total stations were used?
A: A S5 1 second with TDC600, software access, a UHF 35Watt GPS data radio, and different GNSS receiver models for the project.
Q: The airport expansion is part of Lima’s new airport city. How was surveying for the former tied into the latter?
A: The benchmark control points certified by the Peruvian IGN will be left in place and become part of the LAP airport geodetic network.
Autonomous railway track detection
Redundant ssm receiver installation inside a test train in France. (Photo: Hitachi Rail and Syntony GNSS)
Around the world, efforts are underway to increase the safety of rail transportation — both for passengers and for communities along rail lines that are vulnerable to derailments that can lead to spills of harmful chemicals. The most notable recent example of the latter in the United States was the derailment of 38 cars of a freight train in East Palestine, Ohio, in February 2023, which forced the evacuation of a 1-mile radius around the spill.
Hitachi Rail and Syntony GNSS are collaborating on a train safety project in Vélizy, France. Members of the Hitachi Rail team wrote a paper1 on the project that they presented at the Institute of Navigation’s GNSS+ 2024 conference in Baltimore in September 2024. “Everybody is now trying to locate trains with the highest possible Safety Integrity Level (SIL), which is SIL 4,” said Korsakissok, discussing the project. “The partnership between Hitachi Rail and Syntony aims to reach this level by the end of 2025.”
Many modern automatic train operation (ATO) systems — an advanced technology that enables trains to run automatically without the need for a human driver — provide real-time information to the train about its location, speed and other important operational parameters. They use small radio beacons placed along the railway track, typically every third of a mile to half a mile, and an onboard antenna to collect the data. The problem with this positioning system is that it has high installation and maintenance costs. Therefore, the use of GNSS is seen as a major step toward train autonomy. However, due to local disturbances (masking and multipath), classical GNSS positioning methods can be inaccurate by up to many meters, which does not meet railway safety requirements.
The Hitachi Rail safety project in Vélizy is part of a global next-generation train positioning architecture. It supplements a stand-alone GNSS positioning solution with a satellite signal map matching technique and derived integrity methods. It uses cold start for track detection and requires neither motion nor a priori knowledge of the train’s position. The GNSS receiver used in this project is from Syntony GNSS.
A satellite signal map matching (SSM) algorithm developed for this project, in combination with accurate maps, computes the correlation between the received GNSS signal and a predicted PRN code for a chosen satellite, chosen epochs and a known georeferenced point from the map. In the absence of any errors, the user’s antenna would be expected to be located at the georeferenced point. However, this matching is never perfect, so the technique evaluates its quality based on its degree of correlation and the observed delays. It then uses several consolidation methods that take advantage of the whole set of available satellites.
“This approach is well suited to the track detection case of railway navigation when no previous knowledge of the position is given (at train cold start), as the algorithm is detecting a known position, while most of the current GNSS algorithms are estimating a position,” write the authors of the ION paper on the project, who are all members of the Hitachi Rail innovation team in Vélizy.
“The receiver embedded in the train is based on Syntony’s ORION receiver platform,” Korsakissok said. “ORION is a hardware platform that includes a system-on-chip (SoC) from Xilinx, inside which we put a GNSS software-defined radio (SDR) receiver that tracks the GPS L1/L5 and Galileo E1/E5a signals.” For Hitachi, Korsakissok continued, Syntony added a “map matching” feature to the receiver, “which is done in an original (and patented) way: All along the rail tracks, we define some ‘points of interest’ (POI) and the objective of the SSM algorithm is to detect the probability of going over one POI at a given time. Obviously, if there is only one track, and if the train goes from one station to the next, we know that it will pass over this POI, and the only question is when. Inversely, if there are two or more tracks, the most important question is on which track the train is, to avoid any collision. In this case, we define a set of POI on each track, and the key is for our SSM algorithm to tell us which one the train passed.”
The autonomous location software (ALS) used for this project runs on an industrial-grade computer approved for railway usage. Running tests are done in a lab with an antenna located both on the roof of the team’s building in Vélizy and on the train. A grid map from true line tracks is used in both cases.
“To our knowledge,” Korsakissok explained, “almost all train operators that are locating trains with GNSS for positive train control (PTC) or for the European Rail Traffic Management System (ERTMS) are solving this problem by measuring the distance between the position computed by the receiver and all present tracks, then choosing the lower one as the most probable. This can work well if the train is moving and if a hybridization algorithm is used with an inertial navigation system (INS) and odometry. However, it does not solve the so-called ‘cold start’ problem — which is that you cannot use the train’s last known position as the new starting point because it could have been moved without powering up its electronics. The SSM algorithm solves this issue, because it directly correlates each satellite signal that should be received if the receiver were exactly at the position of the targeted POI. This correlation algorithm will have a very strong peak as soon as the antenna is near the correct position. This method has been simulated and tested on real tracks and has shown very good and significant results.”
Once the project achieves SIL 4 — a milestone scheduled for late 2025 — Hitachi Rail will embed the receiver designed and manufactured by Syntony GNSS in its future lines and trains.
Inertial-assisted navigation in an urban canyon
San Francisco’s market street, like all urban canyons, is a very challenging environment for satellite navigation. (Photo: Spondylolithesis / iStock / Getty Images Plus / Getty Images)
Urban canyons — city streets lined with tall buildings on both sides — present two challenges to GNSS: a limited view of the sky, thus a reduced number of satellites in view and a higher positional dilution of precision (PDOP) than under open sky, and multipath, as signals bounce off the vertical faces of the buildings before reaching receivers on the ground. This greatly complicates the tasks of accurate positioning and navigation — which is especially important for vehicles in congested city traffic, where it is essential that they do not stray from their lane.
Hundreds of research papers on possible solutions to the challenge of urban canyons have been presented at satellite navigation conferences over the years. One standard way to compensate for both a reduced number of satellites in view and multipath is to couple a GNSS receiver with an INS. GNSS and INS are inherently complementary technologies.
An INS consists essentially of an inertial measurement unit (IMU) and a computer. An IMU measures an object’s linear acceleration (typically, with three orthogonally mounted accelerometers) and angular velocity (typically, with three orthogonally mounted gyroscopes) in three axes. Because an IMU requires no external inputs, it can operate in tunnels, inside buildings and underwater, and is unaffected by such vagaries of the radiofrequency environment as jamming and spoofing. An INS integrates IMU data to compute positions that are very stable epoch to epoch. However, all inertial systems accumulate measurement errors, an effect known as drift, and therefore must be periodically re-initialized.
Conversely, GNSS-based navigation systems offer consistent absolute positioning accuracy, but their performance is severely degraded by a restricted view of the sky and multipath, two conditions characteristic of urban canyons, as well as RF interference (jamming and spoofing) and ionospheric disturbances.
Therefore, GNSS and INS, when coupled, assist each other beautifully: The INS takes over when the performance of the GNSS receiver is degraded or entirely impeded, then the latter re-initializes the former once it returns to full operation.
An INS provides another benefit for vehicle navigation. In addition to providing data about a vehicle’s trajectory, it also measures its attitude (roll, pitch and yaw), thereby enabling the software to better correlate and interpret the data from the other sensors. For example, when a car breaks sharply, its front end goes down and any forward-facing sensors measure distances to points closer to the car than they did a moment earlier, when its chassis was parallel to the street surface. An INS can also detect unsafe conditions, such as excessive slip angle, which is the angle between the direction of the rolling wheels and that in which the vehicle is pointing (true heading). A slip angle as small as 0.5° can trigger skidding, spins or rollover, especially in the case of SUVs and tall trucks.
A recent test in one famous urban canyon proved once again the value of GNSS-INS integration.
Market Street in San Francisco is one of the major routes across the city, with a diverse urban landscape. It poses numerous challenges in effectively navigating vehicles, especially autonomous ones, due to narrow streets with skyscrapers, resulting in limited sky view and severe multipath. ANELLO tested its GNSS INS here and evaluated the system’s performance in real-world driving conditions compared to other established inertial navigation systems solutions on the market.
Anello’s GNSS INS remains accurate despite multipath and a limited view of the sky. (Photo: ANELLO Photonics)
Market Street is a 3.5-mile urban artery that winds through diverse neighborhoods and commercial zones, presenting a formidable challenge for vehicle navigation as much due to its bustling traffic as for its towering urban canyons. The ANELLO GNSS INS addresses this complex environment by integrating data from its optical gyroscope with those from a GNSS receiver and wheel speed odometers using its sensor fusion engine and unique optical gyroscope technology. In addition to autonomous vehicles, it is also a good solution for agriculture, robotics, construction, trucking, mapping/surveying and defense applications.
To evaluate the performance of its GNSS INS, ANELLO installed it on a test vehicle together with a comparable system made by a different company. The ANELLO team then conducted multiple drives along Market Street, focusing its assessment on the system’s overall heading and positional accuracy. According to ANELLO, the system maintained a close alignment with the vehicle’s actual position along the entire route with a drift of about 1 m on multiple occasions, “significantly outperforming its competitor’s drift rates of 15.5 m, over a drive length of 250 m.”
“The interplay between GNSS and INS is like a tightly choreographed dance,” said Schauble, “where the choreographer is a sensor fusion algorithm. This algorithm continuously evaluates the quality of the GNSS and IMU measurements, assigning weights to each based on their reliability and accuracy.”
The accuracy of an INS is inherently dependent on the quality of its IMU. “When an INS system containing a MEMS IMU is used in an urban canyon, the algorithm is forced to either lean more heavily on the degraded GNSS measurements or accept the noisy and biased IMU measurements,” Schauble pointed out. “This often results in a poor and unpredictable solution in such environments. On the other hand, ANELLO’s GNSS INS leverages a silicon photonics optical gyroscope (SiPhOG) that provides significantly better bias and noise compared to MEMS IMUs. This makes the algorithms less vulnerable to degraded GNSS and multipath effects, allowing the INS solution to maintain accurate positioning in an urban canyon.”
The Global Earth Observation Decentralized Network (GEODNET) Foundation — the organization governing the blockchain-based global navigation network GEODNET — has introduced GEO-PULSE, a GPS navigation device to enhance positioning accuracy for everyday drivers.
With the global vehicle count reaching 1.4 billion, reliable GPS positioning remains a challenge due to obstacles such as parking garages, trees, buildings and atmospheric interference. GEO-PULSE effectively addresses these issues by reducing location errors from 1 to 3 m to less than 0.1 m under typical driving conditions.
GEO-PULSE includes a one-year subscription to GEODNET’s location accuracy service. The device connects seamlessly to iOS and Android devices via Bluetooth, which can improve the accuracy of navigation apps such as Google Maps to provide precise turn-by-turn directions. This connectivity ensures that smartphone users can easily access the improved navigation capabilities offered by GEO-PULSE.
The system is powered by GEODNET’s extensive RTK network, which consists of more than 10,000 validated stations across 100 countries. The device combines sensor fusion with blockchain-powered location correction to deliver centimeter-level navigation accuracy. It supports various automotive applications, including advanced driver assistance systems (ADAS), lane-level navigation and precise positioning for mobility services.