An interview with Markus Uster, head of product center positioning at u-blox about recent GNSS receiver innovations.
Uster
What was the most significant technical innovation in your GNSS receivers in the past five years?
The u-blox F9, launched in 2018, is our robust and versatile high-precision positioning technology platform. It was the first receiver to enable multi-band high-precision positioning solutions for mass-market industrial and automotive applications — and remains the benchmark for the industry today.
The platform combines multi-constellation (continuous reception of four satellite constellations) GNSS technology with dead reckoning and high-precision algorithms. It is also compatible with a variety of GNSS correction data services to achieve positioning accuracy down to the centimeter level.
The u-blox F9 platform is leading the next generation of high-precision navigation with its augmented reality, unmanned vehicles and various machine automation applications. It has since been integrated into a selection of modules catering to a wide range of applications.
What has it enabled users to do that they could not do before?
The u-blox F9 is a widely adopted multi-band GNSS platform for automotive and industrial applications. (Photo: u-blox)
In a nutshell, the u-blox F9 brought high-precision positioning to the mass market. The demand for scalable high-precision technology is growing rapidly, as evident in the automotive world with next-generation advanced driver-assistance systems (ADAS) and in robotics with applications such as UAVs and robotic lawnmowers. However, due to the complexity, size, power and cost restrictions of existing high-precision solutions, until now it has been difficult to meet the demands of these markets.
u-blox developed the u-blox F9 platform by building on the success of our NEO-M8P high-precision GNSS module series and drawing on our extensive experience in GNSS positioning technologies, including dead reckoning, multi-band, real-time kinematic (RTK) and GNSS correction services. The platform delivers the next level of scalable GNSS high-precision technology and shows how u-blox is consistently addressing challenges and driving the GNSS technology evolution.
What is a good example of this?
Integration of the u-blox F9 platform into various applications has proven quite successful in a diverse range of use cases. In the industrial realm, u-blox F9 technology enables mass adoption of commercial unmanned vehicle applications. One example is precision agriculture, where high-precision positioning cost-effectively enables vehicle guidance solutions to improve pass-to-pass accuracy resulting in improved crop yield and reduced consumption of pesticides, fertilizer and seeds. The u-blox F9 modules also paved the way for autonomous driving, including lane-level navigation for heads-up displays and vehicular infotainment systems, a prerequisite for highly automated and fully autonomous vehicles.
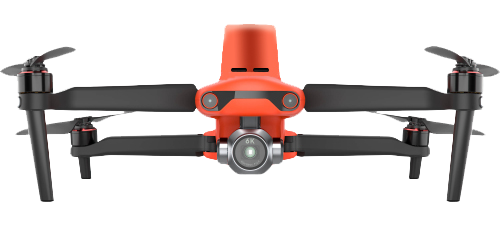
The Autel EVO II Pro RTK UAS. (Photo: Autel Robotics)
Carlson Software and Autel Robotics are partnering on the Autel EVO II Pro Series drone to provide drone operators with the opportunity to use the full suite of Carlson’s software and hardware solutions.
“We can take you through the entire project lifecycle, from setting your ground control points with a BRx7 GNSS receiver and RT4 data collector with SurvPC field software to the actual drone flight to the photo processing on your computer or in the cloud, all the way through to processing that data, creating linework, surfaces, and finished plans in CAD with our powerful, industry-standard office software,” said Derek Roché, Carlson regional manager.
Carlson’s tools for UAS professionals include:
Carlson PhotoCapture, a standalone or cloud-based photogrammetry software to create point clouds, orthoimages, surfaces and more from drone photo data
Carlson Point Cloud office software, which provides powerful tools such as bare-earth and automated feature extraction for point clouds
Carlson’s suite of CAD office software, including the Carlson Survey program to create finished CAD files and plans
Carlson BRx7 GNSS receiver, which can be used both to accurately place ground-control points and as a base to provide corrections to an Autel EVO II Pro RTK drone through Carlson’s Listen-Listen network.
“The workflow capabilities Carlson already has in place present an excellent choice for land development professionals, and now with the addition of the Autel EVO II series to handle the aerial data collection, we’re proud to offer the most comprehensive option in the industry today.”
In 2015, Autel Robotics released its first-generation UAS product: the X-STAR. The success of the X-STAR and the subsequent EVO II series allowed Autel Robotics to quickly build a reputation in U.S. markets. With the introduction of the EVO II series and platform in 2020, Autel Robotics will push its folding UAS to new heights in performance and application.
Carlson specializes in land surveying, construction, engineering, mining, machine control, and CSI solutions for professionals worldwide. In business since 1983, Carlson’s approach has always been to provide its customers with the most efficient, specialized, and powerful tools possible, backed by the best free, unlimited support in the industry.
Visit Carlson’s Autel EVO II RTK product page here, or find your Carlson sales representative or authorized dealer here.
AeroVironment’s Puma is hand-launched. (Photo: Lance Cpl. Frank Cordoba/U.S. Marine Corps)
AeroVironment Inc. has introduced Puma VNS, a visual-based navigation system for its Puma 2 AE and Puma 3 AE small unmanned aircraft systems (SUAS). The system enables navigation across GPS-denied environments.
Puma VNS will receive frequent software and hardware updates, providing operators with advanced navigation capabilities, features and functionality. The system will also enable integration of future autonomy capabilities.
“Puma VNS gives operators an unprecedented advantage in the battlefield,” said Trace Stevenson, AeroVironment vice president and product line general manager for SUAS. “Operators now can execute missions with more confidence in GPS-contested environments with the system’s new navigational capabilities.”
VNS uses a suite of downward-looking sensors to gather imagery data and track features on the ground, as well as an embedded computing module to process and determine the precise location of an aircraft while in flight. The system automatically transitions to and from GPS-denied navigation mode without operator input.
Puma VNS is available as an add-on option for new Puma 3 AE system orders and as a retrofit kit for fielded Puma 2 AE and Puma 3 AE systems.
Trials in Australia are proving 5G LPP can support new positioning services. (Photo: Dan Woodrow, FrontierSI)
Several companies are joining to demonstrate 5G LTE Positioning Protocol (LPP) capabilities in field trials. The trials are part of the 5G Positioning Testbed funded under the Australian 5G Innovation Initiative.
Technology partners include GMV, FrontierSI, Ericsson and Optus, who are joining with industry demonstration partners Kondinin Group, Platfarm (a precision agriculture company) and Position Partners.
The results achieved by the project are considered a key step forward for the use of 5G technology for high-accuracy positioning. The testbed demonstrated each of the high accuracy GNSS-based LPP working modes, including Observation Space Representation (OSR), State Space Representation (SSR), and SSR with atmospheric corrections, integrated directly with user equipment supplied by demonstration partners to examine a variety of real-world applications. The field trials demonstrated that the solution can reach centimeter-level accuracy with fast convergence times using a commercial off-the-shelf receiver and antenna hardware.
GNSS precise positioning is the most common technology for calculating an absolute positioning solution at the user level. For uses requiring centimeter-level accuracy, it is often required to provide GNSS corrections to reduce errors.
Distribution of GNSS corrections is based on either the broadcast of precise point positioning (PPP) corrections through GEO satellites over the L-band, or the point-to-point transmission of real-time kinematic (RTK) corrections using NTRIP through the internet.
Both options have their drawbacks: GEO satellite broadcast requires complex ground infrastructure and can be expensive to maintain, while NTRIP distribution has poor scalability due to the point-to-point connections required for every user.
3GPP (3rd Generation Partnership Project) — the standards organization focusing on 5G LPP — recently introduced the support of OSR corrections for RTK users in Release 15, and the support of SSR plus atmospheric corrections for PPP/PPP-RTK users in Release 16.
Support for these two approaches to high-accuracy GNSS positioning have increased interest in 5G LPP as a potential alternative to existing correction services. Service providers and positioning consumers can now consider the use of 5G LPP as a supporting technology in the provision of new positioning services directly through mobile networks.
The 5G Positioning Testbed has achieved end-to-end demonstrations of high-accuracy positioning solutions using GMV’s Corrections Service and Positioning Engine, delivered through the Optus 5G network using Ericsson network technology, to user equipment designed and operated by FrontierSI.
Field trials conducted in Australia involved real-world scenarios across three areas: precision agriculture, drone operation and augmented reality.
Funding continues to flow into companies developing and testing electric vertical-takeoff-and-landing (eVTOL) drones — both piloted and unpiloted.Plus, the potential for clearing landmines using drones is being investigated by a team at Oklahoma State University.
Air taxis advance with funding
In early September, United Airlines committed to a $15 million investment in Eve Air Mobility, giving the air taxi industry another shot in the arm. The deal includes a conditional purchase of 200 and an additional 200 in options for Eve’s semi-autonomous four-passenger eVTOL aircraft. The investment is one of United’s efforts toward its goal of net zero carbon emissions by 2050.
Eve Air Mobility is partnered with Embraer, the Brazilian aircraft manufacturer guiding Eve’s path to first eVTOL aircraft certification under the National Civil Aviation Agency of Brazil (ANAC). Subsequent approval by the U.S. Federal Aviation Administration (FAA) and the European Union Aviation Safety Agency (EASA) would then be based on the Brazilian ANAC certification program, following in the path of U.S. and European approvals of the Embraer EMB/ERJ series of passenger aircraft.
The Eve eVTOL air taxi. (Image: Eve Air Mobility)
Eve and parent Embraer also have announced a deal with BAE Systems to design an eVTOL aircraft for military and security applications. The technical details of the UAV/aircraft have been kept carefully under wraps, save for the visible use of eight lift rotors and two ducted fans for forward flight. Flight management computers, guidance, air-data, altitude sensors and high-integrity communications would likely be included in the avionics suite.
Meanwhile, United’s prior investment in Archer Aviation and its Maker eVTOL appears to be supporting the Maker’s progress along the road to civil certification. Maker flight tests so far have apparently been limited to vertical flight; its multiple lift and tilt-rotor design has yet to be tested in transition to forward flight.
The Maker eVTOL air taxi. (Image: Archer Aviation)
Nevertheless, more information appears to be available on the configuration of the Maker eVTOL. The company’s approach is to demonstrate early on that safety is a major driver for the design, with significant redundancy in the vehicle’s systems. The Maker has four flight-control computers, plus redundant control and navigation with inertial navigation, GNSS and above-ground-level (AGL) sensors, both radar and laser altimeters. Redundant communication links between sensors, flight-control computers and actuators combine to provide another level of design safety. The vehicle has six lift rotors at the back of the wing, plus an additional six main tilt-rotor lift and thrust rotors — another significant contribution to redundancy.
In January 2021, Archer said that United Airlines ordered 200 Maker aircraft for $1 billion with an option for more aircraft worth $500 million. Archer also just got another healthy financial injection in August with United’s pre-delivery commitment of $10 million for 100 Maker-type aircraft.
There are numerous eVTOL builders around the world. Several of note include Boeing/Wisk (U.S. and New Zealand), Joby (U.S.), Vertical Aerospace (UK), Ehang (China), Airbus (France), Lilium and Velocopter (both Germany) and Beta (U.S.).
Drones help detect landmines
Its difficult to imagine the extent of the problem, but there are many, many areas of the world where landmines are a major hazard to civilian life. Eventually, wars move on or die out, with not only towns and infrastructure destroyed, but significant left-over hazards to reclaiming territory once occupied by the aggressors.
Landmines come in many flavors, but most are deadly and most kill or maim innocent people coming across them. Unexploded bombs, mortar shells and the like also can kill and hurt people, especially children. Apparently, 50 to 60 countries around the world have areas where landmines or unexploded ordnance pose a threat to civilians.
The good news is that several organizations around the world have been using drones to survey areas suspected of being mined. The organizations send drones equipped with magnetic detection sensors a few inches above the ground. The drones geotag mine locations, and those locations go into an area database. Then another drone is sent to drop a detonator on the mine location, with the mine later exploded from a distance.
An investigative team at Oklahoma State University is making an effort to train a drone-based machine-learning system to recognize various types of landmines and explosive ordinance. While the system isn’t aimed at detecting mines without human participation, it’s expected that drone recognition of mines could greatly improve current efforts to remove landmines, and quicken the pace at which the world can get rid of this plague of hidden explosives.
A drone flies over a grid showing 50 types of ordinance. (Photo: Oklahoma State University)
The research team is working in an area they have set up with inert mines of many types to train the drones to recognize the specific type of device and geotag the location. This isn’t artificial intelligence as such; it’s using drones to find an object and geotag it, while the network to which the drone is connected recognizes from the sensor data what type of mine the drone has found.
In the research phase, the team is feeding data into the network on lots of different types of mines and munitions, providing the network with a model for each type of ordinance and eventually enabling device recognition in the field.
To sum up, the rush for air taxis to become a ubiquitous resource for city travel still wends its way through the civilian twists and turns leading to civilian certification for use, with many outfits working hard to build flying testbeds and investors funding their efforts.
Finding novel drone-assisted ways to clear the millions of landmines left over in wartorn countries is becoming a higher priority — notwithstanding Princess Diana’s efforts to draw attention to the suffering and death from landmines several decades ago. Let’s hope this goes somewhere soon.
Light and with low power consumption, the NavGuard NOCTA Mini is a fully integrated day and night optical navigation module for jam-proof and spoof-proof operations
Photo: Asio Technologies
Asio Technologies has launched the NavGuard NOCTA Mini, a tiny jam-proof aerial optical positioning system for unmanned aerial systems (UAS).
NavGuard is a real-time optical navigation system that enables seamless and accurate autonomous GNSS-free navigation for tactical UAS platforms in areas where the GNSS signal is spoofed, jammed or unavailable. Using machine vision technology, artificial intelligence, advanced optics and sensor fusion, NavGuard can be installed on various unmanned aerial platforms to enable safe and sustainable 24/7 drone missions under complete GNSS blackout.
NavGuard’s new mini version, NOCTA Mini, is suitable for installation on small UAS. Lighter than other NavGuard systems and with low power consumption, it is a fully integrated day and night optical navigation module for jam-proof and spoof-proof operations.
NOCTA Mini enables UAS to operate beyond visual line of sight from takeoff to landing. Because it is based on machine vision, the system is drift-free. The self-contained system incorporates a computing module, geographic information system (GIS) infrastructure, and day and night cameras.
Designed for applications such as defense, homeland security and infrastructure security, it is a suitable solution for tactical UAS missions where payload capacity and flight time are limited, and continuous operation under all conditions is critical.
The Visual Navigation System improves navigation in GNSS-denied environments by means of visual odometry techniques
Photo: UAV Navigation
UAV Navigation has released its new Visual Navigation System (VNS), a new capability for manufacturers and end users of NATO Category I and II unmanned aerial systems (UAS).
The compact and lightweight device — provided as an optional peripheral to the main flight control system — enables the safe and efficient navigation of UAVs in GNSS-denied environments. The VNS combines visual odometry techniques and pattern identification with the rest of the sensors onboard the aircraft to ensure that the absolute position, orientation and relative movement of the aircraft over the ground is calculated with extremely high accuracy.
The planning and execution of UAV missions in environments in which the GNSS signal is either unavailable or unreliable is becoming more critical. For some missions, the datalink to the ground control station may be subject to interference, or the operation dictates that the flight must be performed without a datalink from the outset.
Under these circumstances, UAS traditionally rely on an inertial navigation system (INS) to complete the mission. However, all such inertial systems accumulate navigational drift due to sensor noise, propagation models and the difficulty in characterizing external forces. This positional error limits any such UAS operation because an accurate position cannot be guaranteed.
The new VNS, combined with the company’s Vector range of flight control systems, effectively addresses this problem by using data independent from GNSS and more accurate than INS. The system identifies patterns in the terrain below to assist in canceling out any accumulated error, allowing the UAS to operate for long periods without losing positional precision.
Because of its reduced size and weight, the VNS can be installed in Category I and II UAS, enabling them to take advantage of this navigation technique without penalizing autonomy or payload capacity.
The new VNS — developed entirely by the Spanish company UAV Navigation, part of the Oesía Group — has produced outstanding results during flight testing, both on fixed-wing platforms (typically with higher airspeeds and greater service ceilings) and rotary-wing platforms (where high vibrations and hover maneuvers are typically a problem). The new VNS has proved its ability to provide accurate navigation information for flights where there may be an intermittent loss of GNSS signal, and also when a flight must be executed from the outset without GNSS data.
According to Fact.MR, a market research and competitive intelligence provider, the global surveying and mapping services market was worth US$9 billion in 2021 and is expected to expand at a CAGR of 3% during the forecast years of 2022-2032.
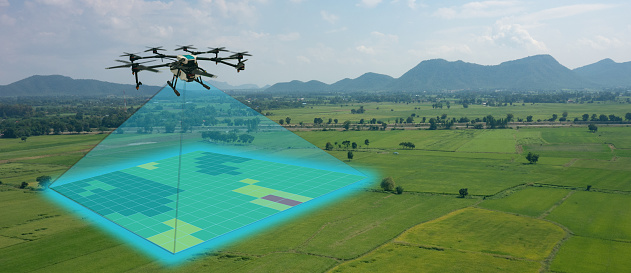
The survey and mapping industry has significantly benefited from drone technologies, because UAVs are less expensive and more accessible compared to traditional methods. Conventional surveying methods require rental aircraft and trained pilots, along with attached recording instruments — a costly and resource-intensive process. The introduction of UAVs has substantially created a future opportunity for surveying and mapping services to gather spatial information in a tighter structure. This also allows the collection of geospatial information with easy storage, processing and sharing capabilities.
For instance, in May 2022, India-based software company PDRL introduced a software-as-a-service platform — DroneNaksha — under the Svamitva Yojana scheme by the government of India for mapping land parcels using drone technology across the country. Similarly, in March 2022, Australia-based Emesent introduced Hovermap ST autonomous drone lidar mapping and surveying payload.
The integration of advanced technologies such as Wi-Fi, first-person view cameras, and GPS technology to make UAVs highly flexible and eliminate the need for a skilled pilot is expected to stimulate the demand for drones for survey and mapping activities, thereby driving market expansion.
Key Takeaways
The global surveying and mapping services market is projected to expand at a CAGR of 3.4% and reach US$13 billion by 2032.
Over the 2017-2021 historical period, the market evolved at 3.2% CAGR.
Forestry and agriculture account for a leading share in the market at a valuation of US$1.80 billion in 2021.
North America and East Asia account for leading shares in the global mapping services market at 24% and 32%, respectively.
Experts at u-blox discuss how they’re creating a hybrid positioning system for automated vehicles using GNSS and terrestrial radio ranging
By David Bartlett, senior principal engineer, Product Center Positioning, and Stefania Sesia, head of Application Marketing, Automotive, u-blox
There’s so much discussion around automated vehicles in the mainstream press these days, that it’s easy to forget some of the critical enabling technology needs to mature significantly before large numbers of people are being whisked from A to B by completely driverless cars.
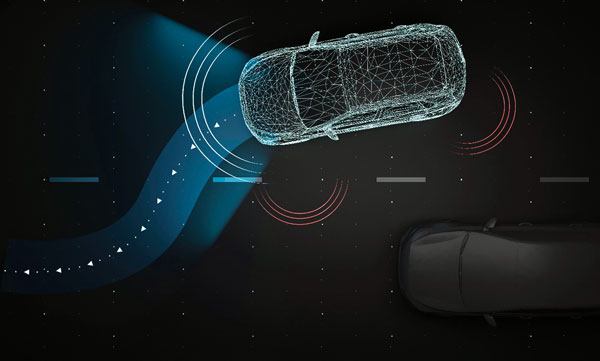
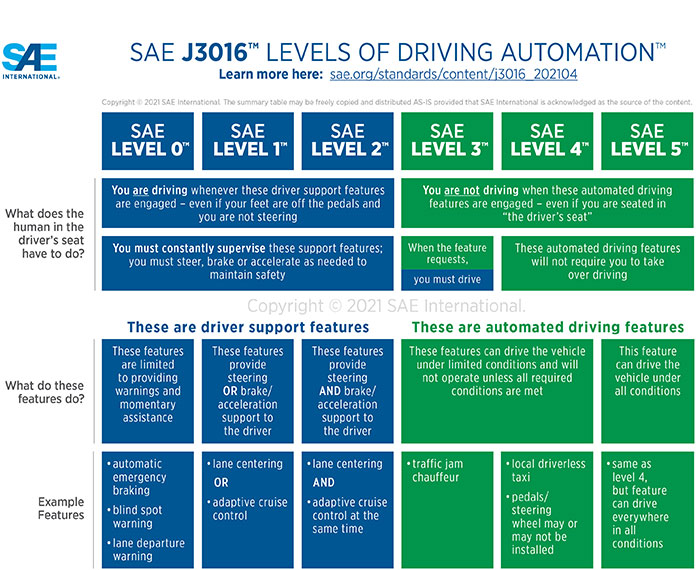
An area demanding particular attention is high-precision positioning. The Society of Automotive Engineers published a six-level automation scale. For vehicles at the higher end of the scale to become reality, they need to be able to reliably pinpoint their location to within centimeters, at all times.
Society of Automotive Engineers’ six-level automation scale. (Image: SAE International)
The positioning systems in most modern cars — which typically use GNSS receivers coupled with an inertial measurement unit (IMU) and the odometer — can’t get close to this level of accuracy. Even in the most favorable conditions for GNSS satellite signal reception, accuracy is between 2 and 5 meters horizontal circular error probable (CEP) without a correction service. In more challenging environments, such as urban areas or indoors, this is significantly reduced.
Using UWB and V2X to complement GNSS
Various solutions are being developed to address this GNSS shortcoming, but all currently have their limitations or don’t offer a solution that’s workable in all environments. Future autonomous vehicles will therefore invariably need to rely on hybrid solutions that blend multiple technologies.
One area where relatively little research has been done to date is in combining GNSS with terrestrial radio signals to enhance automotive positioning accuracy. Cellular vehicle-to-everything (C-V2X), IEEE 802.11p V2X, its successor 802.11bd and ultra-wideband (UWB) can all be used for short-range distance measurements. V2X ITS communications technology is listed as a potential positioning solution in EN 302890 (Intelligent Transport Systems), while UWB technology is gaining momentum for indoor applications, as well as by vehicle manufacturers for keyless entry.
These technologies are all ripe for further investigation as complements to GNSS and IMUs, to ultimately support higher levels of vehicle autonomy. U-blox recently ran a study to evaluate the terrestrial-ranging strengths and weaknesses of IEEE 802.11p V2X and UWB as part of a hybrid solution with GNSS for automotive navigation. Our aim was to establish their feasibility for this application, and identify where further research needs to happen for this type of hybrid navigation solution to become part of future autonomous vehicles.
A terrestrial-ranging system requires a network of fixed ground stations (typically referred to as roadside units, or RSUs, in V2X systems) at known locations. V2X or UWB signals sent out by the vehicle are returned by the RSUs, enabling the vehicle to measure the roundtrip time, and consequently calculate the distance between itself and the anchor point. Do this for three or more RSUs that are geometrically dispersed relative to the vehicle, and you can determine its position.
The need to simulate
Mass deployment of the RSUs required for this type of solution has not yet happened. Installing a suitable network of ground stations in an urban setting on public land wasn’t feasible for our research, in part because the regulatory landscape around UWB in this context is still evolving.
Instead, we set up anchor points around various private estates, from open fields to areas representative of urban environments, such as a business park. We took extensive measurements of the UWB and V2X signals’ behavior in these environments, which enabled us to extract performance statistics such as noise, and subsequently create a behavioral simulation model for the ranging performance.
Our test methodology
Having established our behavioral simulation model for different types of environments, rural, urban and indoor settings, we did a number of real-world test drives. These covered a wide range of driving conditions. We took in high-speed sections of open road, dense urban areas, start-stop congested traffic, numerous corners, and places with limited or no GNSS reception such as tunnels.
During these drives, we collected both GNSS measurements and ground truth. For the former, we used a u-blox NEO-M8L module with built-in IMU. To establish the ground truth, we used a high-grade real-time kinematic (RTK) receiver, GNSS augmentation data service and a high-spec IMU.
We classified each section of the test drives based on the environment — dense urban, tunnel, open countryside and so on — to enable us to apply the appropriate noise models in our simulation.
Next, we allocated RSU positions based on chosen density and placement rules, and added 2 m of random height variation, to ensure we avoided a fully planar deployment. We tested with various numbers of RSUs, to help understand how many would be required to achieve the necessary levels of location precision.
We then set additional simulator variables, such as the accuracy of the timestamp on the ranging measurements.
Having done all of this, we generated simulated ranging measurements between the RSUs and the truth position for every ranging epoch. To these, we added noise on a sample-by-sample basis, and merged the resulting noisy simulator measurements with the GNSS measurements we recorded en route.
Key findings
The output of the simulator enabled us to generate performance statistics that facilitated a comparison between the hybrid GNSS + V2X and GNSS + UWB solutions and a conventional GNSS + IMU solution, similar to those found in mainstream vehicles today.
The table below shows performance of the three solutions.
UWB
V2X (IEEE 802.11p)
GNSS+IMU
Ranging update rate
0.67 Hz
(1.5 s interval)
10 Hz (0.1 s interval)
n/a
Horizontal accuracy
0.1 – 2.5 m (Hybrid)
1.1 – 4.2 m (Hybrid)
1.2 – 5.5 m
Height accuracy
0.4 – 5 m (Hybrid)
5 – 10 m (Hybrid)
2 – 7 m
Frequency of operation
6.5 GHz
5.9 GHz
n/a
Signal bandwidth
500 MHz
10 MHz
n/a
Performance of the three navigation solutions on test.
At a very high level, we found that the GNSS+V2X (IEEE 802.11p) system achieved performance similar to a conventional GNSS+IMU(DR) solution using standard positioning. In situations where there is no GNSS reception, or where this is seriously degraded, an IMU also loses its value, given its reliance on continual GNSS reception to remain aligned. Here, a V2X-based positioning solution would be of value for navigation guidance.
However, more work will need to be done, including into the role of the IMU in high-integrity, high-accuracy positioning, to achieve the levels of accuracy and integrity that autonomous applications require.
The GNSS + UWB hybrid system delivered significantly better performance, approaching the levels that can be achieved using an RTK-based GNSS augmentation service. Our test system ran at 0.67 Hz, and was able to deliver precision close to 10 cm, though we would expect future production systems to align with the more common 10-Hz refresh rate broadly used in V2X.
By pairing a 10-Hz UWB ranging system with a high-accuracy GNSS system using correction data, it should be possible to achieve 10 cm-level accuracy in most situations. GNSS with correction data is already proven to be capable of delivering this level of precision in open areas and motorways. A network of RSUs deployed in urban environments would enable UWB to complement high-accuracy GNSS in situations where satellite reception is challenging.
However, the limited range of UWB, coupled with current regulatory restrictions around outdoor use, limit its usefulness at the present time. That said, micro-navigation in indoor areas, such as parking garages, could be a good fit for this technology.
Other lessons learned
The research brought to light a number of other important findings. First, having even just two RSUs visible, in addition to GNSS, provided significant benefit in the hybrid solution.
Second, height variation in the RSUs is essential if the navigation system is to determine the vehicle’s height accurately, particularly with V2X technology. This will be particularly important when it comes to enabling vehicles to safely operate where there are different levels of road one above the other, such as at multi-level junctions.
Third, we were successfully able to build a hybrid filter to process the signals from the V2X, UWB and GNSS systems, and seamlessly handle the transition between areas with GNSS only (where there were no RSUs deployed) and terrestrial ranging only (such as tunnels).
Fourth, despite the promise it showed for this application, terrestrial ranging is far from immune to environmental effects and multipath. Even UWB would sometimes suffer from non-line-of-sight signal propagation.
Finally, accurate time alignment between the GNSS and terrestrial ranging measurements also emerged as a critical factor. Where we had initially anticipated that alignment to within a few milliseconds would be sufficient, in reality we found we needed to be below 100 microseconds.
What next?
This research has shown the potential of using terrestrial-radio ranging to complement the existing positioning technologies and services being deployed in vehicles today. That said, more needs to happen, not least on the regulatory front, for this technology to genuinely become one of the enablers of future autonomous vehicles.
Outdoor UWB use needs to be permitted for this application, for example, and there needs to be widespread deployment of UWB-capable RSUs. Moreover, when RSUs of any kind are being deployed, thought needs to be given to their possible use as positioning anchors, rather than simply as communication devices.
In addition, more spectrum and wider channels need to be allocated to V2X. And we need to see positioning primitives and signals incorporated into the V2X standards. (Positioning primitives allow a car to know in what direction it is headed — up/down/left/right — relative to a point of reference. It uses signals from the sensors to calculate these values.)
A related area that merits further investigation is the use of UWB ranging to protect vulnerable road users such as people walking, wheeling and cycling. With modern smartphones and cars both now including UWB technology, there are opportunities to use this to make autonomous vehicles more aware of the position of people in their surroundings.
If you’d like to find out more about the research, our methodology, or the results, we’d be delighted to discuss these with you. Please email [email protected] to get in touch.
Partnership will test future eVTOL flight routes and concept of operations in the Kansai region
Photo: Airbus
Airbus is partnering with Japanese helicopter operator Hiratagakuen to develop advanced air mobility services in the Kansai region and beyond. Through this agreement, the companies will tackle crucial aspects required to launch a commercial transportation service with CityAirbus NextGen.
As a first step, the partners’ joint project to organize a simulation of ideal routes, concepts of operations, and necessary equipment for safe electric vertical takeoff and landing vehicle (eVTOL) flights in the Kansai region. Kansai was selected by the Osaka prefecture for the project. A demonstration flight is scheduled for later this year.
With the aim to implement air mobility services beyond urban environments, the joint work of Airbus and Hiratagakuen will support the development of advanced air mobility solutions with CityAirbus NextGen for use cases ranging from air medical services to commercial air transport and ecotourism in a variety of operational contexts.
Airbus and Hiratagakuen will use an H135 helicopter to test advanced navigation and communication technologies for safe operations of eVTOLs in urban environments, while simulating CityAirbus NextGen’s flight configuration.
Hiratagakuen is a Kansai-based helicopter operator that specializes in helicopter emergency medical services (HEMS), transportation of personnel, flight training and maintenance. The company’s fleet includes 14 H135 and two H145 helicopters.
In September 2021, Airbus unveiled its eVTOL prototype CityAirbus NextGen to explore advanced air mobility technologies. The company plans to construct a dedicated center to test the aircraft’s systems in the lead-up to its maiden flight. Airbus is also working closely with industrial and institutional partners to lead the development of urban air mobility ecosystems, including ITA Airways in Italy and launch of the Air Mobility Initiative in Germany.
SABIC, a global leader in the chemical industry, has introduced two new LNP Thermocomp compounds that offer the potential to improve signal gain performance compared to ceramics in second-generation automotive GNSS antennas.
The new compounds, LNP Thermocomp ZKC0CXXD and LNP Thermocomp ZKC0DXXD, help enable the design and molding of antenna substrates with more complex pattern markings that add effective surface area, a critical factor in enhancing signal capture.
For customers that use ceramics, switching to the LNP Thermocomp compounds can help lower system costs by avoiding secondary operations, as well as improving antenna performance. Designers and engineers who find current materials inadequate for developing novel, high-resolution GNSS antennas can help address new requirements with the SABIC products, the company said.
“As GNSS antenna technology advances to its second generation with higher resolution, SABIC continues to enhance the scope and capabilities of our LNP specialty compounds portfolio to meet new performance requirements,” said Joshua Chiaw, director of business management, LNP, SABIC. “Our new LNP Thermocomp compounds can help antenna manufacturers achieve superior signal gain compared to ceramic substrates. They also provide flexibility to produce smaller parts with the same performance as ceramic, or equal-size parts with better performance. This remarkable combination of improved signal capture and design freedom, plus system cost advantages, can help propel innovation in GNSS technology — a keystone of occupant safety today and autonomous driving in the future.”
The LNP Thermocomp compounds, which offer a high dielectric constant (Dk) for miniaturization and a low dissipation factor (Df) to facilitate signal acquisition, can be tailored to meet the electrical requirements of individual applications. They feature electroplating capability, good thermal resistance for reliability, and the design freedom and production efficiency of thermoplastics. Both are well-suited for shark fin-style and new conformal antenna designs.
Project GENIE (GNSS Excluded Navigation Intelligent Enhancement) will mature and advance non-GNSS solutions as part of a long-term objective to enable assured location and navigation in commercial aerospace, helping to unlock the benefits and value of autonomy in civil aviation. The support from NATEP will enable the consortium to take a significant step toward navigation in GNSS-spoofed or -denied environments, the companies said.
“Tomorrow, as we look towards single-pilot operation and future autonomous aircraft, there will not be a pilot or air traffic controller available to mitigate these risks,” stated the companies in a press release. “GENIE has been developed to step into this role. It will be able to identify when a GPS signal has been compromised and, using a combination of techniques, provide a location position as accurate as GPS.”
“The need to provide assured, resilient navigation is a critical enabler for autonomy in the aerospace environment,” said Charles Smith, CCO at Archangel Imaging. “GENIE is a core element of this, and we are very excited to be working with NATEP to help push this technology forward. We see significant commercial exploitation opportunities as a result of this project in the UAV and broader aviation markets and are thrilled to be a part of this round of NATEP funding and support.”