Central Italy — already home to an ambitious national autonomous driving research initiative — will be the site of the P-CARS laboratory, intended to certify positioning devices for use within driverless cars.
The new P-CARS laboratory is financed by the Italian Space Agency (ASI) through the Navigation Innovation and Support Programme (NAVISP) of the European Space Agency. The lab will support the goals of EMERGE, a public-private partnership for innovation established in 2018 between Italy’s Ministry of Economic Development, the University of L’Aquila and the mountainous Abruzzo region. Also in the partnership are the RadioLabs research consortium and the Leonardo, Telespazio and Elital companies.
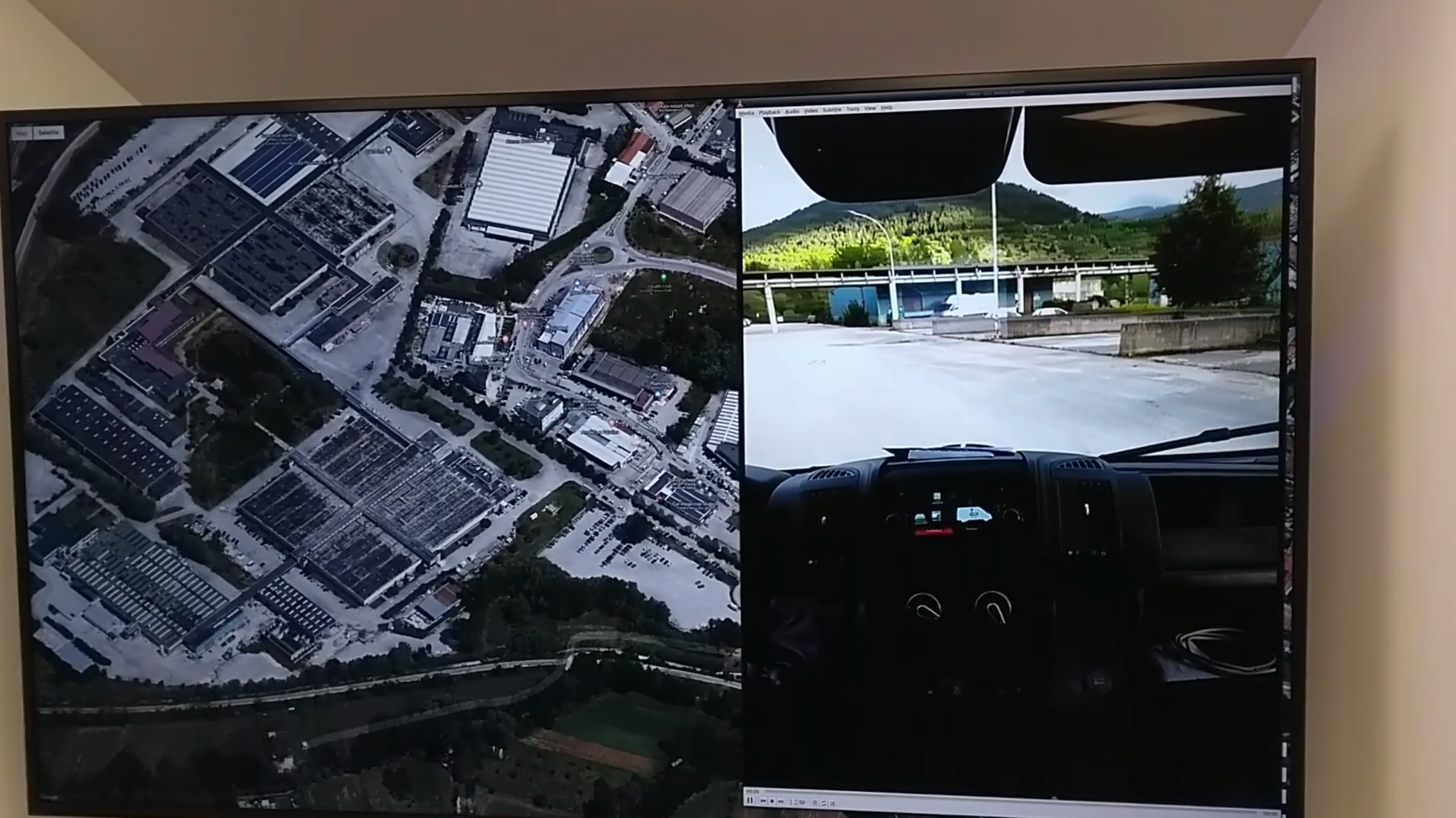
RadioLabs laboratory at the University of L’Aquila, part of Italy’s EMERGE initiative developing autonomous and connected driving solutions. (Photo: RadioLabs)
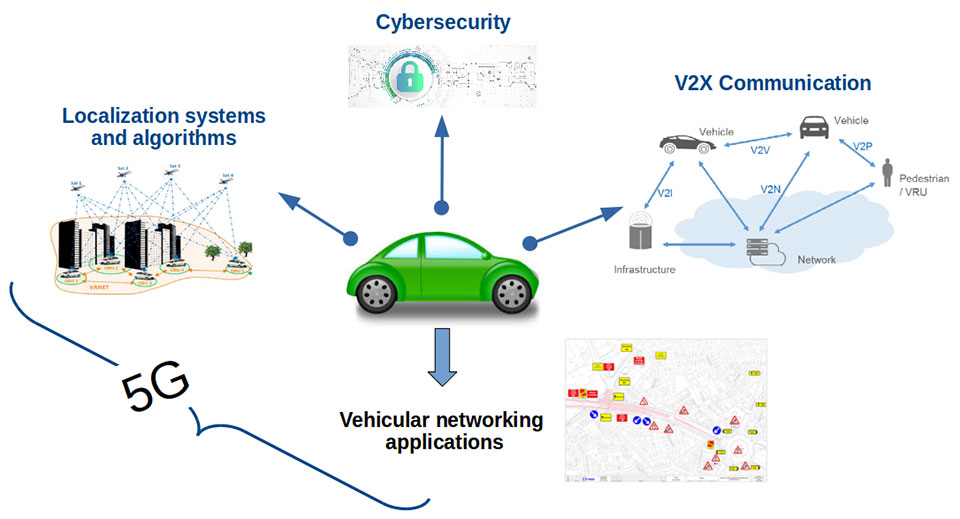
EMERGE will develop satellite navigation and 5G solutions for connected, cybersecure and autonomous vehicles. The new P-CARS laboratory will be an independent venue for testing devices supporting autonomous and connected driving.
“The idea behind it is to create a research ecosystem, focused on developing, testing, validating and promoting the use of Galileo and other GNSS — along with 5G communications — for connected and autonomous driving,” said Francesco Rispoli, chief satellite operations at Hitachi Rail STS and director general of RadioLabs.
Abruzzo already hosts a manufacturing site for Stellantis’ Fiat Ducato light truck, the Galileo control center at Fucino, and the connected-car center of the University of L’Aquila. P-CARS will be integrated into the university’s Center of Excellence for Geo-localized, Connected and Cyber-secure vehicles.
Italy’s EMERGE initiative is developing GNSS and 5G technology for autonomous and connected driving. (Image: RadioLabs)
“The P-CARS lab will have a 150-square-meter testbed area, beside an existing driving circuit, with the right to use the surrounding open space as well,” Rispoli said. “We’ll be addressing connected autonomous driving functions with GNSS technologies that are safety critical, the key point being that safety must be ensured through standardized test procedures, serving as a trusted third-party to validate specific solutions from companies.”
“This is a valuable response to our national strategy, promoting the adoption of positioning, navigation and timing (PNT) solutions in the fast growing automotive sector by leveraging the latest technologies brought by Galileo and 5G,” said Alberto Tuozzi, head of ASI’s Navigation and Telecommunication Department. “Cross fertilization, cooperation and interaction among the stakeholders will be pursued in the unique ecosystem of the Abruzzo region, bringing together space and non-space stakeholders: ASI, ESA, satellite and automotive industries, universities and research centers.”
Autonomous vehicles will have two distinct sets of inputs: sensors such as cameras, lidar and radar to know the context around the car; and GNSS and inertial measurement systems to know its position. The two sets work independently but come together to ensure safety. (Photo: RadioLabs)
Leveraging its expertise on Galileo and safety applications, ESA will support this initiative in two ways: with technical support and through cooperation and exchanges with other institutions and laboratories at the international level. ESA said P-CARS could become part of a network of centers of excellence in the PNT domain applied to autonomous cars and beyond.
P-CARS will exploit the synergies between the rail and automotive sectors to provide benefits to both. “Car manufacturers produce millions of vehicles and are investing heavily in autonomy and safety systems, but had little experience in this field before they began investing a few years ago,” Rispoli said. “Meanwhile, the rail community has almost 20 years’ experience managing train driving functions with a high degree of autonomy, through the common European Rail Traffic Management System, ERTMS.”
Hitachi Rail and Rio Tinto collaborated to build the world’s first driverless heavy freight train – an automated heavy haul freight transportation system delivering freight from mines to ports in Australia across thousands of kilometers every day. (Photo: Hitachi Rail)
“It is well recognized that ERTMS guarantees the highest safety levels as a connected and autonomous driving system, where the human driver is largely bypassed, but not the volume for mass producing such systems for reducing their cost. By leveraging these two peculiarities it will be possible to get low cost but safety-proven GNSS-based devices,” Rispoli said.
The emphasis will be on connectivity, with the vehicles linked to the infrastructure, including a centralized system of intelligent roads as well as other cars. 5G will enable low-latency communications and be a source of positioning data to extend the performance of GNSS.
P-CARS is being supported through Element 3 of NAVISP, focused on supporting ESA member states’ navigation priorities.
Zala Aero Group unveiled a new unmanned system for long-distance flights — the Zala 421-16E5G — at the closed exhibition Zala Expo, which began on April 19 in Moscow.
The Zala 421-16E5G is a domestic unmanned aerial vehicle with a hybrid power plant. The non-aerodrome-based system is capable of providing aerial monitoring over distances of more than 150 kilometers and staying in the air for more than 12 hours.
The Zala 421-16E5G has a unique power plant that charges a buffer battery for an hour. The power plant allows the UAV to fly long distances. During production test flights, the Zala 421-16E5G flew 16 hours.
The unmanned system is equipped with a combined payload with two thermal imagers and a 60x video camera. Optionally, the Zala 421-16E5G is capable of carrying a payload weighing up to 10 kg. The video stream is broadcast in high-definition format (1280 x 720 resolution), which allows the ground-station operator to view the streaming image in great detail.
In addition to optoelectronic loads, the device is equipped with electronic reconnaissance equipment and communication repeaters. Objects are detected and recognized in real time by the onboard computer based on artificial intelligence.
Only if you have been living under a rock will it be a surprise to hear that the unmanned helicopter called Ingenuity has arrived on Mars attached to the SUV-sized rover called Perseverance. Both have been on the Red Planet since they landed on Feb. 18.
NASA has since then been in checkout and test mode for both rover and UAV, but Perseverance got a pretty clean bill of health and was commanded to motor over to a flat piece of adjacent Jexero crater — now referred to as the airfield or heliport. There, Ingenuity was detached from the underbelly of Perseverance. Then the little bird lost its power feed from mama rover. Now it has to rely on its own batteries and a small solar panel. The big SUV rover pulled away to a safe 215-foot distance ,and the folks at NASA set about preparing Ingenuity for flight.
This article was written during the period when things were proceeding with some hesitancy and delay, so things in the article unfold in the same sequence as we all experienced them while we eagerly awaited Integrity’s maiden flight.
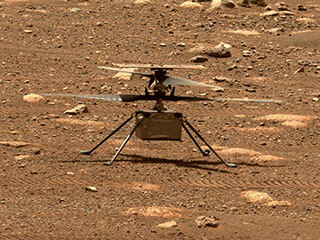
The Ingenuity waits to take its first flight. (Photo: NASA)
Countdown to Flight
At only 4 pounds (weighing 1.5 pounds on Mars), the Ingenuity UAV is small, but it’s packed with electronics that allow it to communicate via top-mounted antennas with the rover.
It carries a lithium ion battery recharged by a small solar panel mounted on top (350 watts is required for a 90-second flight). The UAV also contains heaters to maintain the avionics through the cold of the Martian night. It carries two cameras — a black-and-white navigation camera and a high-density color imager — plus sensors for image processing, data collection and storage, navigation processing and vehicle control.
One of the objectives for this first flight demonstration is the miniaturization and weight reduction of all these electronics. The NASA website is a little obscure about how the UAV navigates, but perhaps it uses some form of terrain matching/image processing in conjunction with an onboard inertial sensor and laser altimeter.
Early Shutdown. The UAV had already survived a few nights on its own at around -117F when NASA began to spool up the two four-foot long blades to around 50 rpm during the checkout, and all seemed well until April 9, when a full-speed 2400 rpm spin-test began, and there was an early shut-down due to a watchdog timer — intended to shut things down if something wrong was detected prior to flight. None of this was learned in real time, as radio signal commands take more than 15 minutes to travel the 173-million-miles from Earth to Mars, with the same delay to send back data from what has already happened.
The density of atmosphere on Mars is only 1% that of Earth, so getting Ingenuity off the ground is more complicated than on Earth. The four-foot-long composite carbon blades have much more surface area than here on Earth for a typical UAV. The two contra-rotating blades spin at around 2400 rpm — a drone on Earth would typically spin its rotors at around 450 rpm.
Testing on Earth. NASA tested this configuration in a huge vacuum chamber with 1% air density, and Ingenuity flew just fine. The lower gravity on Mars — about 38% that of on Earth — will also help compensate for the lower level of lift available from the Martian atmosphere.
Because of the radio link delay to and from Mars, Ingenuity can fly and land autonomously only once commands are received. Onboard sensors provide data to enable the vehicle to execute the stored flight profile. The navigation camera provides guidance, and the 13-megapixel color-imaging camera can record the scene. Data and video collected are sent back to the rover for transmission to Earth via the Mars Reconnaissance Orbiter, an Mars satellite that acts as a data relay.
Ingenuity left the rover and rested on the surface of Mars, while NASA ran a slew of preflight checks. (Photo: NASA)
The First Hop. The first‘ hop was planned to last only a few seconds, but subsequent flights promise to be 165-foot plus, at more than 16 feet above the surface. If things go well, NASA might get more adventurous for the planned fourth and fifth flights.
All these flights are supposed to happen during the first month of Ingenuity’s flight activity; then Perseverance has to move on with its real task — searching for signs of ancient life on Mars. With no communications possible without the rover, the current plan is to abandon the little bird, even though it may still be fully functional.
Working to Clear the Watchdog Timer. NASA worked to clear the watchdog-timer problem and give Ingenuity clearance to fly. Over the weekend of April 10–11, the Ingenuity team came up with a fix for flight software. which overcomes the watchdog-timer issue.
However, before the new software could be uploaded to the ground station on Earth and sent to the Perseverance rover for onward transmission to Ingenuity, extensive testing and validation of the software change was necessary. The existing flight software had not been changed for more than two years, so it’s understandable that NASA wanted to be sure before uplinking new software.
Past the April 14 Date. The initially predicted flight date of April 14 came and went, and we still awaited news of the outcome of the next rotor spin-up test. Lift-off and autonomous flight and landing were still to come.
Meanwhile, another team member came up with a fix to the sequencing of commands that would transition Ingenuity from ground to flight mode, the place in the sequence where things had previously hung up. The revised sequence was sent to Mars and on April 16. The subsequent spin test went off successfully with the contra-rotating blades turning at the anticipated flight speed of 2400 rpm. Apparently, the work on the new version of flight control software was still proceeding, but NASA had decided they have sufficient confidence to set a new flight date of April 19.
Monday April 19 — The Integrity photographs its shadow while airborne. (Photo: NASA)
Maiden Flight
Then, while we all slept, on April 19 at 3:30 a.m. Eastern Time, Integrity executed the command. It autonomously took off, hover edat a height of 10 feet for around 60 seconds, and then returned to its Martian airfield.
Above is a picture Integrity took of its own shadow while airborne. it was around noon on Mars in bright sunlight, hence the clear, well-defined shadow. Data received some time later via Perseverance and the Mars Reconnaissance Orbiter contained laser altimeter readings that confirmed this first flight. The color video from Perseverance also shows the spinning rotors and the UAV taking off, hovering at 10ft, descending and landing.
A small patch that Integrity carries is from the Wright Brothers’ flimsy, powered Wright Flyer, which flew for the very first time on Earth on Dec. 17, 1903. Now we have the very first powered flight on another planet. NASA has scheduled another four or five flights for Integrity, so we may soon even see moving panoramas of Mars from Integrity.
So now we can chalk up the first powered flight on another planet as another major human achievement — discounting, of course, that maybe some other species has done it eons ago. But, nah, we all know Mars is a dead planet, now.
Parrot drones professional users benefit from an advanced control during complex fleet operations
Drone company Parrot is partnering with High Lander, which provides drone fleets with autonomous flight, intelligent airspace control, and coordinated air continuity through its Mission Control platform.
Combining Parrot ANAFI USA and ANAFI platform drones with High Lander’s Mission Control software, professionals can now access drone features through an easy-to-use dashboard.
“Parrot is continuously striving to provide our professional users with extended capabilities — allowing them to rapidly adapt their drone operations to fit their changing and urgent needs,” said Jerome Bouvard, Parrot director of strategic partnerships. “Drone automation and intelligence are at the heart of our product and software developments. This new partnership with High Lander represents another step towards enhanced automation and control capability of our drones.”
Using real-time device reporting and telemetry, first responders can autonomously manage their drone fleets while performing takeoff and landing, route-planning, and other crucial tasks — all from the intuitive comfort of the Mission Control Operations Center dashboard. The software’s seamless interface paired with the ANAFI USA’s ease-of-operation and rapid deployment provide more safety for responders and allow faster intervention during critical moments. Mission Control’s customized live link generation can also provide team-members onsite with an instant view of a drone’s video feed for fast assistance during search-and-rescue missions.
For surveying and mapping missions, operators can use improved control modes including Path (which sets an automated plan including multiple waypoints, telemetric, gimbal and payload settings) and Modeling & Mapping (which allows operators to survey an area in detail) as they efficiently create 2D maps and 3D models using Parrot ANAFI’s precise GPS coordinates capabilities.
Operators can also benefit from Mission Control’s Payload Sidebar, which enables switching instantly to thermal imaging, an invaluable tool for missions in search and rescue, police pursuits, or solar panel inspections. Parrot ANAFI USA’s integrated FLIR Boson Thermal sensor and 32x zoom make it easy to identify thermal anomalies and centimetric hot spots from an altitude of up to 40 meters.
“As a hardware-free system, Mission Control is compatible with leading drone manufacturers’ solutions, now including Parrot, to provide our customers with the freedom of customizing their drone fleets with best-in-class UAVs,” said High Lander CTO Ido Yahalomi.
High Lander is working with a number of prominent organizations including police departments, sheriff’s offices, fire stations, and forestry services, and has 12 active clients who will now be able to use Parrot’s ANAFI USA and ANAFI drones in their fleets.
The High Lander Pilot app is available for download on Android and iOS systems for use with ANAFI and ANAFI USA platform drones.
For more information about ANAFI USA, contact Parrot through the ANAFI USA contact form.
XPeng Motors‘ new XPeng P5 smart electric vehicle is equipped with automotive-grade lidar technology. The P5 has “navigation guided pilot” (NGP) capabilities, which will be on China’s city roads for the first time in a production vehicle, powered by XPeng’s full-stack in-house developed autonomous driving system XPILOT 3.5.
The XPILOT 3.5 autonomous driving system has a high-precision positioning unit (GNSS + inertial measurement unit, or IMU) along with 32 perception sensors — two lidar units, 12 ultrasonic sensors, five millimeter-wave radars and 13 high-resolution cameras. The sensors are fused into a 360° dual-perception system to provide sufficient redundancy to handle challenging and complex road conditions.
The double-prism lidar units are able to distinguish pedestrians, cyclists and scooters, static obstacles, and road work, in challenging scenarios such as night and low-light conditions, backlighting and alternating light-and-dark illumination in tunnels.
Extending the NGP function from highways to city diving, the P5 will be able to handle situations such as other autos cutting in, automatic follow and speed-limit optimization on urban roads, recognizing traffic lights as well as small objects.
The P5’s Xmart OS 3.0 in-car operation system supports all-voice interaction. It uses Qualcomm’s Snapdragon SA8155P auto-grade computing platform to ensure seamless user control and interaction. The instrument console includes a 15.6-inch screen with essential information and controls where the driver needs them. Xmart OS 3.0 also allows vehicle-to-home connection.
The P5 will be featured at Auto Shanghai 2021 on April 19.
Trimble to provide reliable in-lane positioning for the year-long research program
Trimble and VSI Labs have formed an alliance, with Trimble serving as the GNSS precise positioning supplier for VSI’s autonomous research vehicle program. The alliance officially kicked off in March at Destination ACM, a long-distance driving event for VSI’s research vehicle that continues with additional events throughout the year.
The collaboration provides the opportunity to showcase Trimble RTX technology as the trusted precise-positioning correction source for car manufacturers and their suppliers. Coupled with Trimble’s inertial positioning, Trimble RTX plays a pivotal role in a vehicle’s ability to maintain accurate and reliable lane-discipline during autonomous driving.
Destination ACM launched from VSI’s Minneapolis headquarters en route to the American Center for Mobility’s (ACM) test center in southeast Michigan where a day of testing and demonstration took place March 26.
“The integration of Trimble’s precise RTX positioning is a key element of VSI’s technology stack for advanced driver assistance systems (ADAS) and autonomous vehicle (AV) applications,” said Stephen Ruff, general manager of Trimble’s On-Road Autonomy Division. “VSI Labs is a leading researcher of best-in-class technologies critical to autonomous vehicle development.”
Suitable for on-road driving applications, Trimble RTX corrections operate on a single, global network. Drivers are not subject to the coverage outages that can exist when relying on local positioning systems — requiring line-of-sight to a positioning source or radio/cellular/internet connections.
When occasional obstructions are present, such as a bridge, tunnel or deep urban or rural canyon, Trimble augments its precise GNSS positioning with inertial technology to maintain continuous positioning and orientation while on the road.
Trimble’s innovative GNSS positioning is being used on the road today by a number of automotive OEMs and Tier 1 suppliers to improve the functional safety and performance of ADAS for passenger vehicles. Consumers have logged more than 7 million miles using Trimble RTX for lane-level positioning to date.
“VSI Labs is thrilled to have Trimble’s RTX technology on board,” said Phil Magney, founder and president of VSI. “Trimble’s positioning capabilities allow us to really expand our applied research on the safety and performance of autonomous and ADAS driving solutions.”
Trimble GNSS positioning technology will be used in the VSI research vehicle during each of the quarterly Destination ACM events, the Drive World Conference in Silicon Valley in August, the VSI 2021 “Drive South,” and other events this year.
For more about autonomous vehicles, see our June issue.
The physical and digital world are integrating. We are nearing the edge of the analog universe. Physical immersion is giving way to virtual immersion. It is the virtualization of products and services in the evolution of technology. Michael Saylor calls it the sixth wave of software engineering. We are moving away from externally experiencing data and are moving towards actively interfacing with data directly in virtual space.
“You can Zoom anywhere at the speed of light and bend time and space.” — Michael Saylor
The world of tomorrow is already here. We are waking up to it. The blips of information at the fringes are coming nearer. The horizons of time are as far as one can see into the future and the past. How far can you see? From wherever you are there are others who can see a little further. Look forward. Look back. Others are ahead and behind. They exist where time is most comfortable for them. Some take up positions living in the past. Some stake their place as far into the future as they are able. Look towards those early adopters. Ask them what they think. They see more clearly the blips of information out on the horizon.
What are those blips? How will they impact the geospatial community? How can you position yourself to take advantage of the coming trends?
America needs to go back to work and America’s infrastructure is old and in disrepair. In 2019, Congress introduced H.R.4687, the SMART Infrastructure Act, a $2 trillion bill but it never made it out of the House. However, that bill is being reintroduced. This time it will become a bill putting America back to work and its price tag will likely eclipse the previous bill. It will address infrastructure — all types of infrastructure: physical, data, cybersecurity, health, financial, transportation, energy, and communications. It will be a primary theme for the next two decades. Get ready! Change can happen fast and it’s about to accelerate.
“The future happens slowly and then all at once.” — Kevin Kelly
Rebuilding this infrastructure will require geospatial technologies. STEM has been the siren call for the past 30 years and for good reason. Those who heeded the call and invested their education into coding, engineering, data science, geospatial technologies, mathematics, artificial intelligence, and other STEM related fields are going to lead the coming workforce. Now is the time to get certified and establish your credentials.
Take the case of architectural design and construction. It used to be blueprints drawn on light tables. That is how I learned to do it back in the 1970s. Then it all moved to computer aided design (CAD) drawings. Now, urban planners and architects create immersive 3D virtual reality (VR) visualizations. That is becoming standard practice.
Project managers used to spend their day making their rounds walking the site ensuring the project was being built to specifications. However, that is changing. Soon, each worker’s safety glasses will have built-in augmented reality (AR). They will build their portion of a project exactly to plan. Project managers will connect with workers in the field and see the project they are working on progress in real-time while in their office on 3D models.
When the project manager does walk the site he or she will be wearing augmented reality (AR) head-up displays and able to compare the physical construction to the digital model in real-time. Backhoe and excavator operators will grade to exact precision. Robots will be common at construction sites assisting operations and enhancing current capabilities. Unmanned aerial vehicles (UAV) will fly regular patterns over construction sites. Heavy-lift UAVs will supplement cranes for some operations. Subsurface structures, whether buried beneath the ground or behind a wall will be digitized with precise location data making future replacements and repairs swift and easy. The uses of geospatially dependent technologies will continue to grow. The construction worker of tomorrow will be very different than the one of today.
Photo: Trimble
The new infrastructure will be built with smart technologies and incorporate renewables and “green energy” initiatives with a responsible approach to sustainability; for example, roadways will have embedded peizo-electric crystals in the asphalt to generate electricity from passing vehicles. The electricity will charge batteries that will power smart sensors embedded in the street and provide power to street lights with sensors and 5G networks along the roadways. Excess power will transfer to other microgrids for use elsewhere. Energy will also come from capturing wind on top and along the sides of buildings, along roadways, and at tunnel exits and entrances. Thermocouples will capture heat and generate electricity.
Solar power will be generated from panels, windows, films, and even paint surfaces. All of these sources together will feed into microgrids. Some of this renewable energy will convert water to hydrogen for fuel cells, and some will power carbon dioxide (CO2) converters to extract CO2 from the atmosphere and create synthetic fuels. In 2010, Sunexus submitted a geospatial study of the solar reforming process to the Office of Scientific & Technical Information (OSTI). The study showed that nearly 58% of industrial CO2 waste from power plants, cement plants, ethanol production, and natural gas processing could be converted to synthetic diesel fuel.
Image: U.S. Office of Energy Efficiency and Renewable Energy
Besides energy, other smart materials will be used such as small sensors that are geospatially sensitive nanodevices embedded in roads, bridges, tunnels, buildings and other structures. They are wirelessly connected to one another creating a 3D mesh network. These nanodevices continuously report their structural health. This 3D mesh network can detect vibrations passing through it that cause distortions in the mesh framework.
Geospatial artificial intelligence (GeoAI) will profile devices based on their normal statistical ranges. If any data such as location, temperature, humidity, pressure, acoustics or health status exceed the device’s standard deviation the GeoAI will analyze surrounding nodes in the mesh network to depict patterns. Suspect events will immediately come to the attention of emergency services. These microdevices can provide early detection of cracks in a structure or deterioration of a surface protection layer.
The use of these devices extends beyond structural monitoring. More broadly, they have societal applications too, such as for security purposes. When fitted with acoustic sensors they can detect sounds, and by geospatially analyzing the data from many thousands of devices the epic center of a noise event can immediately be located. Take for example a gun shot, fireworks, an explosion, or a vehicle accident. The increased acoustic signal would trigger the GeoAI monitoring the devices to plot a spatial analysis of the acoustic report. The map would alert area would flash red on the monitor at the control center and nearby cameras would zoom in on the location providing images and live video feeds all within moments of the triggering event. The analysts at the control center could immediately assess the situation and dispatch the proper response units.
Embedded devices also serve as seismic sensors blanketing broad areas and are able to record surface vibrations moving through the mesh network. An earthquake would appear as a moving wave field along the network.
Additionally, data from the mesh network can integrate with other devices. It can provide smartphones with precise location data. Imagine no longer standing on a street corner turning in circles trying to figure out which way to go. When connected with the mesh network and looking through AR glasses or the smartphone view screen the path will be illuminated. Autonomous vehicles will connect with the mesh network and have absolute positional accuracy and have awareness of other vehicles, bikes, and pedestrians ensuring a more safe and efficient experience for everyone.
The mesh network can be used as a base layer for georeferencing the world. Notifications, warnings and requests for information can be sent to smartphones within an exact georeferenced location. Imagine being in your third-floor apartment sitting in your chair, listening to music on your headphones and reading an ebook. You are oblivious to the noise outside. An audible alert is sent to your phone and calls your attention. You look at your phone and a message is requesting information related to a possible gunshot at DD°MM’SS.sss N, DD°MM’SS.sss W. You click on the notification and a map opens up. You see it is right outside your window. You go to the window, look outside and see two people duck into a car. You watch as red tail lights drive away. You look back at the location on the street where the vehicle had been and a person is slumped over leaning against a stairwell.
On your phone you press the red alert button on the map application triggering a distress signal and confirming the incident may have been a gunshot and someone has possibly been injured. Emergency services immediately dispatch. Others nearby received the same alert message because it was automatically generated and sent out to all phone numbers within the area defined by the geospatial acoustic solution. Surveillance cameras on the corner of buildings were also triggered by the alert and automatically focused on the origin of the noise. Images of the assailants were captured along with the license plate of the vehicle. As the vehicle drove away a network of surveillance cameras continued following it turn by turn until it was finally intercepted and the occupants apprehended.
This world is nearer than it seems. The technologies are already here. Once the infrastructure bill is passed construction projects will begin and our physical world will begin to integrate with the digital world. The engineers design it. The construction workers and robots will build it. And it will be geospatial technologies holding it all together.
William Tewelow works for the Federal Aviation Administration. He is a graduate of the FAA management fellowship program. He served on special assignment to the U.S. Department of Transportation leading a national strategic geospatial initiative for the White House Open Data Partnership. He is a Geographic Information Systems Professional (GISP) and a speaker for the Maryland STEMnet Scholar program. He was among the first in the nation to earn a Geospatial Specialist Certification from the U.S. Department of Labor while working at NASA Stennis Space Center. He has degrees in Geographic Information Technology, Intelligence Studies, and is completing a masters degree in Organizational Management. William is a 23 year veteran for the U.S. Navy serving as a Geospatial Specialist, Imagery Intelligence Specialist, a Naval Aviator, a Meteorologist, and a Tactical Oceanographer. He is married, enjoys writing and traveling. His favorite quote is, “A man’s mind changed by a new idea can never go back to its original dimension.” — Oliver Wendell Holmes
Inertial Labs has released a new generation of GPS-aided inertial navigation systems (INS) for applications such as UAVs, helicopters and lidar surveys.
The company also has released two new inertial measurement units (IMUs) for measuring angular rates and accelerations for motionless and dynamic applications.
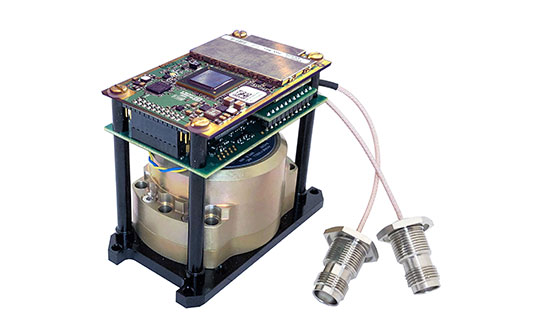
INS-DH-OEM
The INS-DH-OEM. (Photo: Inertial Labs)
The high-accuracy INS-DH-OEM is designed for easy integration into custom enclosures and higher order integrated system applications. It combines the HoneywellHG4930 inertial measurement unit (IMU) into a GPS-aided INS to provide high-accuracy orientation, position, velocity and timing for land and aerial systems.
Consisting of three axes each of high-precision accelerometers and gyroscopes, the accuracy of the HG4930 plays a key role in the exceptional performance of the INS-DH-OEM. With input from the IMU, the INS-DH-OEM has a pitch-and-roll accuracy of 0.015 degrees real-mean-squared (RMS) for dynamic applications, and a pitch-and-roll accuracy of 0.01 degrees for motionless applications.
Another key factor for the INS-DH-OEM is its use of the NovAtelOEM7720 dual-antenna GNSS receiver. The OEM7720 is an all-constellation, multi-frequency heading and positioning solution with TerraStar PPP correction services and advanced interference mitigation features.
With aiding data from the OEM7720, the INS-DH-OEM features a 2-meter baseline heading accuracy of 0.05 degrees RMS for both static and dynamic applications. As a result, the INS-DH-OEM is a high-performance solution in line-of-sight and beyond line-of-sight antenna-pointing applications.
A reliable solution in varying environments, the OEM7720 ensures that the INS-DH-OEM is outputting the most accurate GNSS-aided data by supporting GPS, GLONASS, BeiDou, Galileo, NavIC (IRNSS), and QZSS constellations.
The INS-DH-OEM can be applied in a wide range of aerial applications such as remote sensing, flight control and photogrammetry in which the INS-DH-OEM provides accurate positioning, navigation and timing (PNT) data for multi-rotor drones, fixed-wing drones and other UAVs performing these tasks. This data is paramount in the accuracy of these applications’ deliverables such as point clouds, orthomosaics and photogrammetric plots.
Weighing 280 grams and measuring 85.7 x 62.5 x 52.0 mm, the INS-DH-OEM is a lightweight, compact system that can be fitted with custom enclosures or integrated into higher order systems such as lidar payloads. It is compatible with scanners from many lidar manufacturers: Livox, Velodyne, Ouster and Quanergy. This adaptability, coupled with top-of-the-line subcomponents and Inertial Labs’ sensor-fusion expertise, make the INS-DH-OEM the suitable for UAVs, UGVs, antenna pointing, and many more applications.
INS-U
The INS-U. (Photo: Inertial Labs)
The new INS-U GPS-aided INS with air data computer (ADC) output signal is based on a u-blox module.
The INS-U a fully integrated INS, attitude and heading reference system (AHRS), IMU and air data computer high-performance strapdown system that determines position, navigation and timing information for any device on which it is mounted.
The INS-U utilizes a single antenna, multi-constellation U-Blox GNSS receiver. With access to GPS, GLONASS, Galileo, QZSS, and BeiDou, the INS-U can be used in a variety of GPS-enabled environments and is protected against spoofing and jamming. Additionally, the INS-U is comprised of two barometers, a miniature gyro-compensated fluxgate compass, and tri-axis temperature calibrated advanced MEMS accelerometers and gyroscopes. These high-performance sensors, along with Inertial Labs’ new on-board sensor fusion filter, state of the art guidance and navigation algorithms, provide accurate position, velocity, and orientation of the device under measure.
Perhaps the most defining feature of the INS-U is its embedded ADC. An essential avionics component for modern UAV applications, an ADC outputs static & dynamic pressure, pressure altitude, calibrated & true airspeed, true angle of attack, rate of climb, and wind speed of the device under measure. This data, combined with inertial reference information, provides UAVs with accurate information about the unit and its relation to its environment.
By using data from an INS, AHRS, IMU and ADC, the INS-U provides a complete navigation solution for UAV and Helicopter applications. The unit can use time-of-flight aiding data from a ground station for long term GNSS-denied conditions as well as external position and heading so it can still output accurate PNT information regardless of the environment.
The INS-U is a lightweight and compact solution with dimensions of 82 x 40 x 26 mm and a weight of less than 200 grams. This, along with an IP67 environmental enclosure, ensures that the INS-U can meet the environmental requirements and size and weight restrictions of a wide range of applications.
IMU-NAV-100
The IMU-NAV-100. (Photo: Inertial Labs)
The IMU-NAV-100 is a tactical grade IMU for wide range of higher order integrated system applications.
The newest addition to the Inertial Labs Advanced MEMS sensor-based family, the IMU-NAV-100, is now the best performing IMU that Inertial Labs offers. The IMU-NAV-100 is a fully integrated inertial solution that measures linear accelerations, angular rates, and pitch and roll with high accuracy utilizing three-axis high-grade MEMS accelerometers and three-axis tactical grade MEMS gyroscopes.
The IMU-NAV-100 features continuous built-in test, configurable communications protocols, electromagnetic interference protection, and flexible input power requirements which allow it to be easily integrated in a variety of higher order systems.
The IMU-NAV-100 line contains two options to accommodate a variety of projects.
The IMU-NAV-100-S is best for projects that require high performance stabilization for antenna and line-of-sight stabilization systems, motion control sensors, and platform orientation and stabilization systems. With a gyroscope angular random walk of 0.04 deg/√hr, the IMU-NAV-100-S is specialized to provide accurate data for stabilization applications.
The IMU-NAV-100-A is best used in a variety of systems such as GPS-aided INS, AHRS, and motion reference units. Regardless of the application, the IMU-NAV-100 is the company’s best performing IMU to date, providing a pitch-and-roll accuracy of 0.03 deg RMS. Fully calibrated, temperature compensated, and mathematically aligned to an orthogonal coordinate system, the IMU contains up to 0.5 deg/hr bias in-run stability gyroscopes and 0.003 mg bias in-run stability accelerometers with very low noise and high reliability.
Unmanned aerial vehicles (UAVs) are something of a Swiss Army knife for the surveying and mapping communities. Commercial applications continue to grow, with UAVS — known as drones in the vernacular — gathering data and observations for agriculture, mining, utility inspections, natural resources, historical preservation, security, and many more applications.
UAVs perform high-risk tasks that keep workers out of harm’s way. They fly in places and situations difficult or impossible for aircraft to reach. They collect high-resolution imagery across the spectrum, accompanied by exact positioning and location data. They detect and help preserve the past in rich detail.
A study by Polaris Market Research predicts the UAV market will reach $15.62 billion By 2026, spurred not only by new use cases, but through miniaturization and improvement of components. Payload components that continue to improve include GNSS receivers, inertial measurement units, micro-electromechanical components, cameras of all types (RGB, thermal, hyperspectral and high-resolution video) and lidar. (For more on lidar with UAVs, see Diving into UAV lidar surveys.)
In these pages, we share a variety of case studies from companies taking part in the UAV revolution. In many of these use cases, companies saved considerable money using UAVs rather than more traditional surveying methods. In others, UAVs are helping to keep people safe.
In all cases, using UAVs provides a wealth of data that offer new insights, no matter the application.
Every ounce counts on a drone. While a larger ground plane on a GNSS patch antenna improves its performance, the additional size increases weight — an unacceptable tradeoff.
The antenna’s location on the drone is another factor. It must be distant from motors and other electronic components that generate interference, which undermines positional accuracy. But remote locations are often off-limits because the antenna’s weight in those spots would disrupt the delicate balance drones require.
Drone-maker Parrot took these factors into consideration when choosing a GNSS antenna for its ANAFI USA drone. Although it weighs just 500 grams, ANAFI USA is designed to operate in winds up to 53 km/h.
To meet these challenges, Parrot chose the Taoglas DSGP.1575.15.4.A.02, a passive patch antenna that supports GPS L1 and Galileo E1. At 3.3 grams and 4 mm high, with a 15-mm2 footprint, the DSGP.1575 is designed for ultra-compact devices.
Key customers
High GNSS accuracy and reliability are critical for Parrot customers such as the French military, which recently ordered 300 ANAFI USA drones for reconnaissance and intelligence missions by its conventional and special forces.
Manufactured in the United States, ANAFI USA has also been selected by U.S. federal government partner organizations as part of the Blue sUAS project — the only UAV from a non-American drone manufacturer to be commercialized on the GSA Schedule, the buying platform of the U.S. military and civilian government agencies.
Police departments, federal agencies and firefighters in the United States and other countries also use ANAFI USA. The drone is also used for surveying, inspection and other commercial enterprises.
Tuned on a 50×50 mm ground plane, the DSGP.1575 operates at 1575.42 MHz with a 2.59 dBi gain. It uses ceramic materials — suitable for UAV applications because drones spend most of their time flying parallel with the horizon, a position in which ceramic antennas collect sufficient GNSS signals to meet performance requirements.
The DSGP.1575’s light weight and energy efficiency enable the ANAFI USA to carry bigger payloads and fly longer, up to 32 minutes compared to the consumer model’s 25 minutes.
“We chose Taoglas because of the quality of their antennas and their ability to tune an existing antenna in the mechanics of the product and to make it on a large scale for mass production,” said Meryam Abou El Anouar, Parrot technical leader for RF and Connectivity. “They are also known for their great experience with the GNSS propagation specificities as multipaths, so that is helpful when you try to achieve good GNSS accuracy.”
Taoglas provided Parrot with design and testing support in its design centers, as well as making regular visits to Parrot’s facility in Paris.
“Our engineering team managed to carry out tests at antenna and system levels,” said Baha Badran, Taoglas Global Antenna Technology director. “This includes passive antenna testing, in-chamber active antenna testing and GPS field testing of the drone. Each of these tests was carried out to ensure optimum GPS system performance was achieved, to give the highest possible positional accuracy for such an application.”
The support also helped Parrot minimize the cost and lead time for bringing the ANAFI USA to market.
The West Virginia Department of Transportation (WVDOT) turned to UAVs to save time and money. Incorporating drones has saved WVDOT more than $340,000 in a single month.
In 2017, WVDOT began formally looking into launching a drone program. WVDOT concluded that drones could be ideal for stockpile surveys — using them had the potential to speed up the process, reduce risk, and increase accuracy.
Jesse Bennett, statewide survey unit leader at WVDOT, flew several test missions to validate the use case. He quickly realized drones had huge potential to transform this time-consuming and risky task.
The agency began with a team of nine Federal Aviation Administration-certified drone pilots and 12 drones. WVDOT also began using Skyward’s Drone Management Platform to manage their flights, pilots and equipment. Skyward offered a single, digital platform to coordinate complex missions and obtain airspace permissions.
“I saw the need for something like Skyward from the very beginning, when I was the first and only pilot,” Bennett said. “I was manually making entries in flight logs and maintenance logs, and I was using about seven or eight different apps and websites just to plan and fly a mission.”
Using Skyward as a single place to keep track of every aspect of the drone program enabled Bennett to quickly resolve an investigation after someone mistakenly assumed he didn’t have authorization to fly in an area and reported him to the FAA.The software helped him demonstrate that crews were obeying FAA regulations and WVDOT’s own rules.
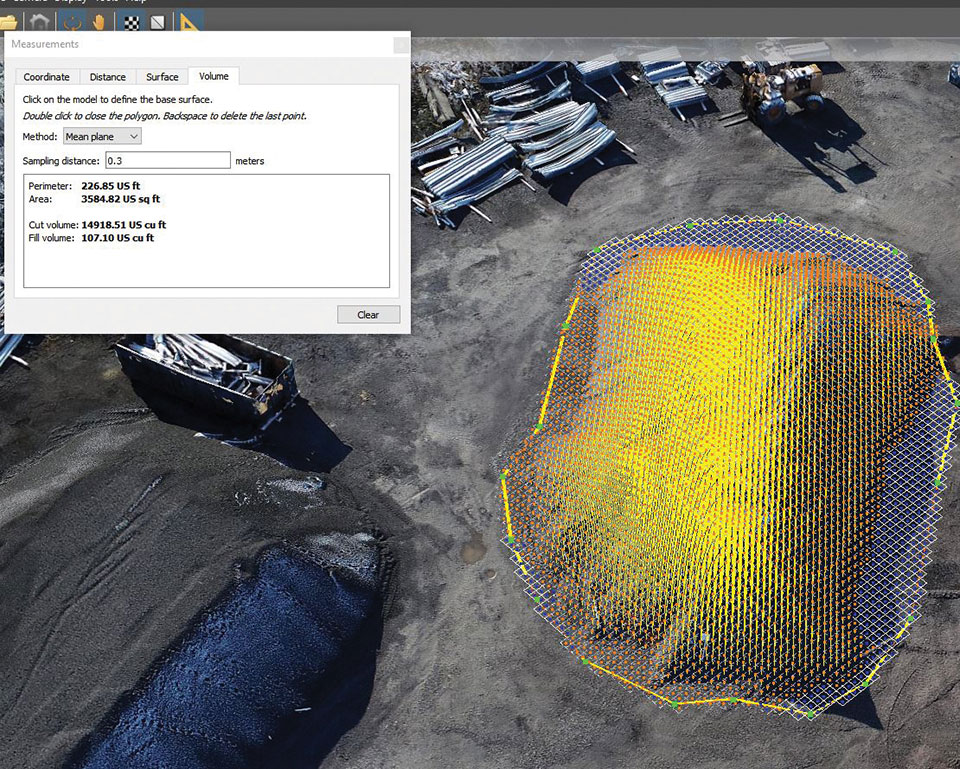
Starting in spring 2019, WVDOT began deploying drone crews for stockpile inspections at scale. WVDOT has 177 sites across the state that contain stockpiled materials. Each year, the stockpiles must be physically surveyed to calculate the volume of material. From 42 surveyors laboring for 15 workdays, the same workload took seven UAS pilots only nine workdays to complete the project.
CHC Navigation (CHCNAV) has released the AlphaAir 450 (AA450) lidar system, a lightweight, compact all-in-one sensor for unmanned aerial vehicles (UAVs).
Featuring an inertial measurement unit (IMU), GNSS, 3D scanner and camera, the AlphaAir 450 solution is suitable for power-line inspections, topographic mapping, emergency response, agricultural and forestry surveys. The unit is easy to use, and can be rapidly deployed in the field to collect geospatial data.
“Despite the fact that the lidar scanning is an efficient technology to capture 3D data, it still often remains costly and complex to operate,” said Andrei Gorb, product manager of CHC Navigation’s Mobile Mapping Division. “Taking that into account, we introduce the AlphaAir 450 (AA450), a breakthrough lidar scanner that delivers user-friendly and high-accuracy capabilities at a reasonable price.”
Key aspects of the AlphaAir 450
Lightweight. The lidar’s weight is a constraint for any drone. The AlphaAir 450 weighs 1 kg, which is suitable to most drones’ payload requirements. The lighter the unit, the longer the operating time of the drone, and the greater the productivity. The AlphaAir 450 can be easily mounted on UAVs, making data capture efficient.
Advanced Accuracy. By combining industrial-grade GNSS with a high-precision IMU, the AlphaAir 450 can easily achieve an absolute accuracy of 5 cm (vertical) and 10 cm (horizontal) for small survey areas — typically adequate for the most use cases. To further improve precision and accuracy, users can apply adjustment algorithms in the CHCNAV CoPre software.
Industrial Reliability. Featuring IP64 high-level protection, the AlphaAir 450 extends its operating temperature capabilities, down to –20° C and up to +50° C in any field environment. This can increase users’ return on investment by providing more field survey days in a year.