As GNSS denial, jamming and spoofing threaten aviation safety, SandboxAQ and Acubed, the Silicon Valley innovation center for Airbus, have released real-world test results from a five-month, nationwide projectdesigned to test the accuracy of AQNav.
AQNav is an artificial intelligence-driven magnetic navigation (MagNav) system. AQNav uses advanced quantum magnometers to read Earth’s crustal magnetic anomalies, like a geoohysical fingerprint, then employs large quantitative models (LQMs) to filter out electromagnetic interference and precisely determine an aircraft’s position without relying on satellite signals.
These new results come from a nationwide initiative with Acubed’s Flight Lab to test the navigational accuracy of AQNav. Meeting the aviation industry’s Required Navigation Performance (RNP) standards is necessary for deploying the system on military, commercial and civilian aircraft.
AQNav’s performance was tested under various opertional scenarios and demonstrated advanced precision, accoding to SandboxAQ. The goal was to determine whether magnetic anomaly-aided navigation could broadly meet navigation requirements for commercial aircraft. AQNav’s capabilities exceeded the accuracy required for en route travel between airports — even on the program’s longest flight.
Accuracy
RNP Standard
Required Accuracy (meters)
% of Flight Time Met
RNP 0.3
550
64%
RNP 1
1,852
95%
RNP 2
3,704
100%
To demonstrate how the real-time capable system would operate in real-world conditions, flight data was collected, reprocessed, and streamed in real time to produce statistical insights, offering representative capability data for joint team evaluation.
Real-World Impact
SandboxAQ and Acubed focused on designing tests to mirror authentic, real-world aviation scenarios. For example:
Standard aircraft platform: AQNav was tested using publicly available magnetic maps aboard a standard Beechcraft Baron 58 – rather than a compensated geosurvey platform. This aircraft was modified only to accommodate the additional AQNav instrumentation – no extensive electromagnetic shielding or specialized noise isolation were used. All sensors were positioned inside the aircraft, powered by AQNav’s software to deliver a clean magnetic signal.
Use of apublicly available map. For all flights, AQNav researchers used the publicly available North American Magnetic Anomaly Map (NAMAM), which covers the U.S., Canada, parts of Mexico and surrounding oceanic regions.
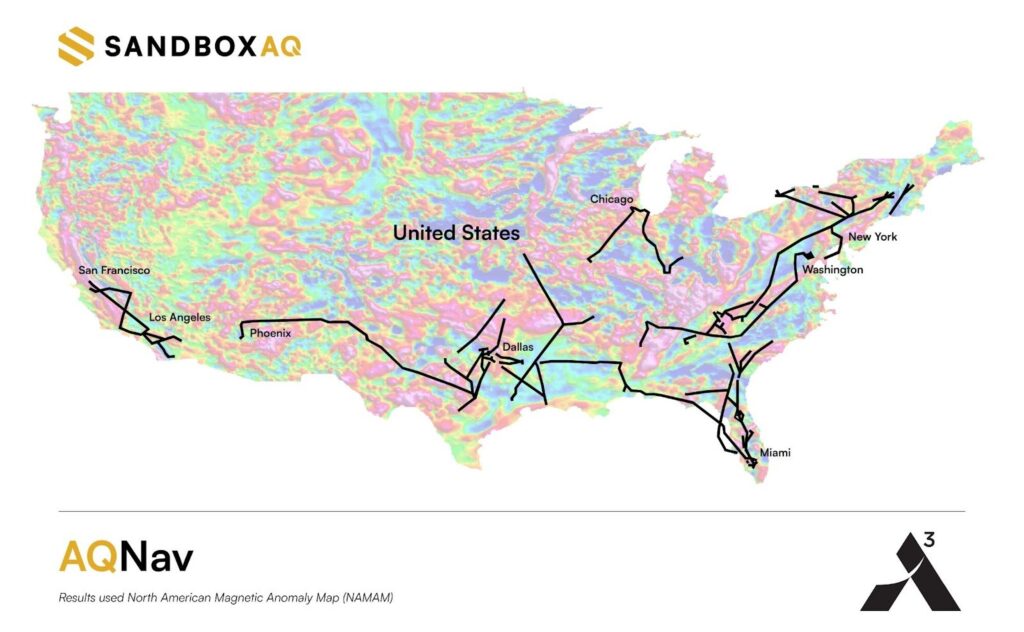
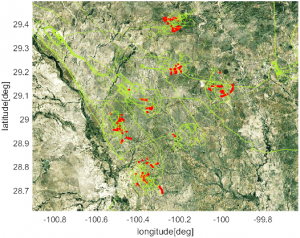
Unfiltered flight paths: Flight operations spanned diverse, operationally relevant routes between 200 airports across the entire continental U.S. (Fig. 1), without filtering based on magnetic anomaly strength, magnetic map quality, or favorable geomagnetic gradients. More than 150 hours of flight data was collected.
Diverse geophysical environments: Data was collected over a full range of conditions, from magnetically-rich mountains to sparsely featured plains, reflecting real-world geographies where aircraft might operate without GNSS.
True operational noise: Onboard, AQNav successfully filtered out the real-world interference generated by the aircraft, including electromagnetic, vibrational and other airframe-induced noise.
Fig. 1: Acubed Flights with AQNav (Credit: AQNav
Elijha Williams, AQNav’s technical engagement manager, said: “Our campaign was not about demonstrating proof of concept performance under ideal conditions, it was about proving AQNav’s viability under the noisy, messy, and unpredictable environments real pilots face every day.”
During test flights exceeding two hours, AQNav outperformed the Inertial Navigation System (INS) without GNSS 100% of the time. During a one-hour flight over the challenging mountainous and forested terrain of California, AQNav achieved its best-observed accuracy of less than 74 meters, or roughly two-thirds the length of an American football field.
Precision, Scale and Autonomy for the Future
This campaign marks a significant step toward widespread adoption of AQNav in aviation. By consistently maintaining accuracy in an uncontrolled, national testbed, SandboxAQ demonstrated AQNav’s operational robustness under real-world conditions.
Andrew Sosa Sosanya, a quantum navigation machine learning engineer at SandboxAQ, highlighted the impact of the data collected: “Thanks to Acubed, the U.S. Air Force, and other partners, we’ve accumulated a highly relevant MagNav dataset. This creates a flywheel effect—the more data we gather, the faster we can improve model accuracy across diverse mission profiles.”
AQNav is also undergoing testing with Boeing, a U.S.-allied air force, and as part of NATO’s 2025 DIANA cohort.
SeRo Systems, a German-based leader in air traffic surveillance security and monitoring solutions, is expanding its portfolio with the launch of its newest monitoring technology for improved aircraft situational awareness. The live GNSS RFI Situation Display (GRSD) is a real-time solution that combines live air traffic information with SeRo’s advanced GPS jamming and spoofing detection and short-term predictive alerts — offering enhanced visibility into the airspace.
For more than 10 years, SeRo has developed advanced air surveillance and monitoring technology for customers including EuroControl, Baltic air navigation service providers (ANSPs) and spectrum regulators, Austro Control, armasuisse and other aviation organizations. SeRo is the only company that provides real-time GNSS RFI monitoring to two of the three Baltic states.
Operational picture at a glance
Designed with and customized for ANSPs and spectrum regulators, the new GRSD leverages SeRo’s vertically integrated receiver network and uses its anomaly detection and high-precision multilateration (MLAT) to help users assess their operational picture at a glance. The system monitors the airspace and displays live traffic combined with a color-coded real-time GNSS interference intensity map that identifies zones subject to interference.
Its short-term interference alerting feature utilizes AI to predict when aircraft will experience interference and gives the user a time estimate. As soon as an aircraft is impacted by spoofing, GRSD automatically highlights the aircraft and generates an alert indicating both the spoofed and the correct aircraft position.
“With jamming and spoofing incidents on the rise, timely and actionable intelligence matters more than ever,” said Matthias Schäfer, CEO of SeRo Systems. “Our new GRSD product delivers real-time insights on GNSS RFI and provides a live operational view that helps users prepare and respond.
GRSD works seamlessly alongside SeRo’s SecureTrack platform, combining real-time data for instant decision-making with historical insights for strategic airspace monitoring, analysis, reporting, and incident investigation. “Together with our SecureTrack solution, ANSPs and spectrum regulators now have the tools they need for unmatched situational awareness,” Schäfer said.
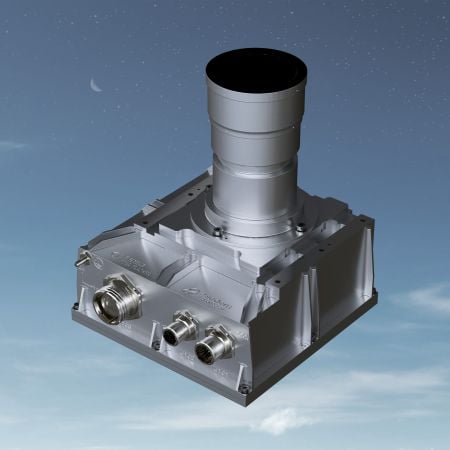
Sodern announces the commercial launch of Astradia, a daytime star tracker which, when combined with an inertial navigation system, allows more precise and robust navigation under GNSS-denied environments.
Specifically designed for civil and military aircraft, Astradia can operate day or night guided by stars. Astradia offers tracking capacity to within a few arc-seconds, equivalent to 1 meter at a distance of 70 km. This function, which is extremely useful for aligning inertial navigation systems or its registration during mission, opens the door to applications with demanding tracking requirements, including stealth missions.
The sensor delivers measurements to the aircraft without interruption, providing operational capacity at any point on Earth, including over the oceans, with no need to update maps or charts in order to carry out the mission. This sensor effectively reduces navigation drift during long flights and more generally improves the security of in-flight positioning.
Astradia is an endo-atmospheric star tracker that provides daytime and nighttime attitude measurement, for precise, robust and reliable onboard geopositioning data. It helps counter the natural drift in inertial navigation systems. It also offers the advantage of emitting no waves, which could otherwise expose an aircraft to detection.
Astradia is compact (176 mm x 185 mm x 207 mm) and weighs less than 3 kg. It was specifically designed for easy integration on all types of aircraft. This optimized design makes Astradia ideal for a wide range of applications, including drones and surveillance aircraft.
Several thousand of Sodern’s star trackers are already in service, along with a star catalogue and proven detection algorithms. This technology has also undergone conclusive in-flight testing.
Astradia will be featured at the Sodern stand during the 2025 International Paris Air Show.
The Radio Technical Commission for Aeronautics (RTCA) has released a six-file document titled “DO-401 Minimum Operational Performance Standards (MOPS) for Dual-Frequency Multi-Constellation Satellite-Based Augmentation System Airborne Equipment.”
The document is designed to support validation of airborne requirements when using dual-frequency GPS, Galileo and satellite-based augmentation system (SBAS) signals as defined by International Civil Aviation Organization Standards and Recommended Practices (Annex 10, Volume I, Amendment 93), as well as the development of dual-frequency multi-constellation SBAS services.
The SBAS MOPs document does not provide specifications for a production approval.
The RCTA stated that a future release of the document will provide requirements supporting production approval, typically through a new Technical Standard Order or European Technical Standard Order.
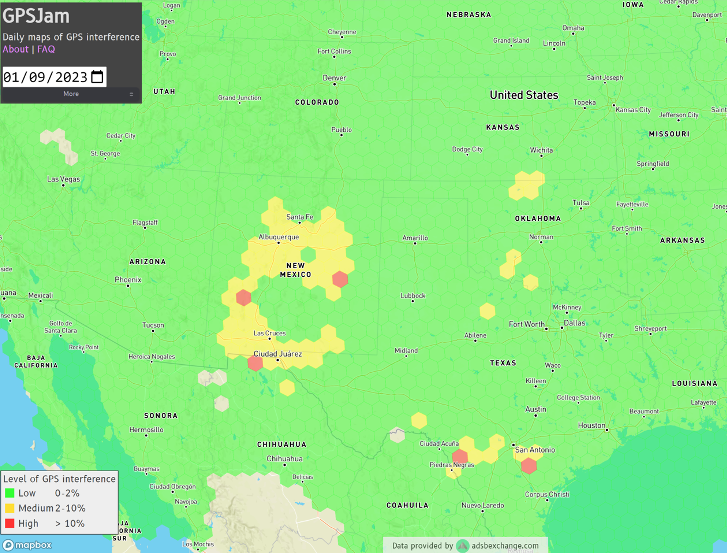
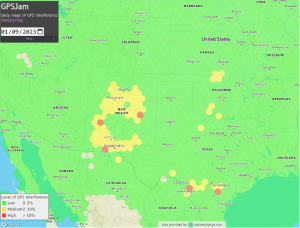
Ever since it came on-line in February 2022, the website GPSJam.org has shown what appears to be regular interference with GPS signals in Texas near San Antonio and Del Rio, and locations north and south of Oklahoma City, Oklahoma.
Only on normal workdays, however. Not on weekends or holidays. Furthermore, whatever was happening also took time off between the Christmas and New Year holidays GPSJam.org also shows similar, though less regular, activity in New Mexico. Experts say this is easily explained as White Sands Missile Range is often the site of electronic warfare training and tests. These are always announced in advance in FAA Notices to Air Missions (NOTAMs) when any interference with GPS reception is anticipated.
The regular patterns observed in Texas and Oklahoma and the lack of NOTAMs led some experts to speculate the source could be inadvertent interference from a commercial or government activity. Said one former official, “It’s just the kind of pattern you see from large organizations. They are off every weekend, federal holidays, and around Christmas.”
Aerobatic-capable Military Training aircraft reporting low NIC values (Image: Stanford University)
GPSJam.org is the brainchild of aviation analyst John Wiseman. The site uses crowdsourced ADS-B reports gathered by the ADS-B Exchange and displays it on a world map. Areas in yellow indicate that between two and ten percent of ADS-B reports for the day had low navigation accuracy. Areas in red had ten percent or more.
Information from the site has proved useful in identifying patterns of regular GPS jamming and spoofing in Russia and other conflict areas around the globe.
The workday patterns in Texas and Oklahoma have appeared on GPSJam.org displays since the site went live in February 2022.
GPS Interference and Aviation
Minor interference with GPS signals is fairly common. GPS jamming devices, while illegal to use, are inexpensive and easy to obtain from vendors on the internet.
Truck drivers wanting to defeat their company’s fleet tracking system, people concerned about being tracked by the government or others, even ministers trying to keep parishioners from texting during sermons – all have been known to use such devices.
Most GPS interference is unintentional. A two-year European Union study found hundreds of thousands of potentially harmful signals, but judged only about ten percent to be intentional. The rest were the inadvertent byproduct of poorly tuned electrical and electronic equipment.
ADS-B tracks of training aircraft performing aerobatics. Red indicates low NIC value reported. (Image: Stanford University)
While most GPS interference is unintentional and localized, spurious signals powerful enough to noticeably impact airborne operations are not unknown.
In two separate incidents last year strong interference near the Denver and Dallas airports impacted air traffic, each for more than a day. The Denver incident lasted for 33 hours before authorities found the source and shut it down. Air traffic was disrupted at Dallas for 44 hours according to government sources, though researchers found the actual interference only lasted for 24 hours. The source of the disruption was never identified.
In 2019 a passenger aircraft was almost lost due to GPS interference while on approach to Sun Valley, Idaho’s Friedman Memorial Airport. As the aircraft flew a GPS-based approach in smoke and haze, the interfering signal was just strong enough to lure it off course and toward a mountain. Fortunately, a sharp-eyed radar controller hundreds of miles away spotted the problem and intervened in time. The source of the interference was never identified.
As a result of the Sun Valley incident and input from numerous aviation groups, the International Civil Aviation Organization told its members there was an “urgent need to address harmful interferences” to satnav signals.
Texas and Oklahoma Mystery Solved
A researcher at Stanford University finally solved the puzzle of the strange recurring sequence of reports from Texas and Oklahoma.
While investigating last October’s GPS interference event near the Dallas airport, PhD candidate Zixi Liu noticed aircraft outside the main area of effect also reporting low Navigation Integrity Category (NIC) values. This began before and continued after complaints from commercial airlines about GPS not being available at Dallas-Fort Worth. These aircraft were in the same general area of Texas, but far enough away that there were large areas between them and Dallas that did not contain any reports with low NIC values.
Low navigation accuracy reports displayed at GPSJam.org. in New Mexico reports were due to GPS interference from military testing. In Texas and Oklahoma, military aerobatics training likely caused reports of low navigation accuracy. (Image: GPSJam.org)
At the same time MS Liu was also investigating anomalous ADS-B reports near San Antonio and Del Rio, Texas. She discovered in all three cases the reports of low NIC values were coming from military training aircraft regularly used for aerobatics. Other aircraft nearby reported good NIC values and showed no evidence interference.
In a recent presentation to the Institute of Navigation, she postulated that Interference with GPS signals was not the cause of the low navigation integrity reports. Rather, the rapid maneuvers and unusual aircraft attitudes of aerobatics caused the airplanes’ navigation receivers to intermittently lose lock on signals from GPS satellites. This caused their ADS-B equipment to report low navigation integrity.
Having solved that mystery, Ms. Liu continues to work on her original question – identifying the source of October’s 24-hour GPS disruption near the Dallas-Fort Worth airport.
Mr. Dana A. Goward is the President of the Resilient Navigation and Timing Foundation and a former US Coast Guard helicopter pilot.
Thales Alenia Space is a joint company between Thales (67%) and Leonardo (33%).
EGNOS enhances the accuracy, reliability and integrity of positioning signals by improving the performance of GNSS. For instance, the EGNOS safety-of-life service is used in aviation for landings, enabling precision approaches at European airports without requiring ground guidance systems. The service has significantly improved operational safety and efficiency for European aviation.
Thales Alenia Space will build on its expertise in engineering, development, testing and maintenance of the existing EGNOS, along with its current development of EGNOS V2, to provide maintenance of the EGNOS V2 system for EUSPA and the European Union satellite navigation community from 2023 to 2026.
Thales Alenia Space will provide operational support and servicing in case of incidents — especially hardware and software troubleshooting and repairs — to deliver optimal 24/7 support for EGNOS. In addition, it will provide the upgraded or modified versions needed to ensure safety-of-life service.
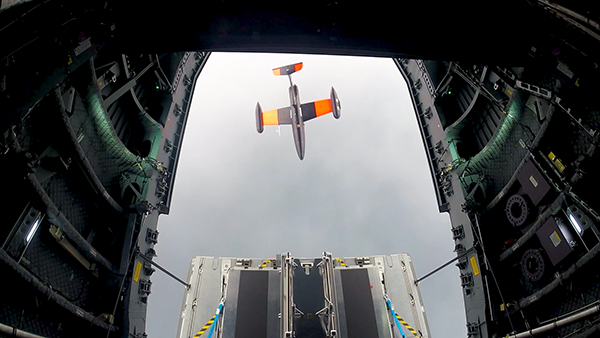
Germany has successfully launched the Future Combat Air System (FCAS) Remote Carrier demonstrator, released by an A400M.
The launch was carried out by the Bundeswehr Technical Center for Aircraft and Aeronautical Equipment (BAAINBw) and the German Aerospace Center (DLR), with collaboration from Airbus and German companies SFL and Geradts.The Remote Carrier demonstrator — an altered Airbus Do-DT25 drone — was launched from a device created specifically for the A400M to release remote carriers.
After the remote carrier was launched, its Do-DT25 engines were ignited, and it continued to fly. Controls from the A400M were then handed to the ground operator who landed the drone successfully.
As a part of the launch, the A400M was also evaluated to determine its role in FCAS to serve as a UAV launcher. Because the launch results were successful, Airbus is aiming to have the multi-role air lifter serve as the host of remote carriers.
The remote carriers and A400Ms will have an integral role in expanding the use of unmanned systems by Airbus’s military transport aircraft in the FCAS.
NextNav Inc., a GPS and 3D geolocation company, has acquired Nestwave SAS, a privately held company specializing in low-power geolocation.
The acquisition was completed Oct. 31 for $18 million.
NextNav is based in McLean, Virginia, and Nestwave is located in based in Neuilly-sur-Seine, France. Nestwave provides advanced geolocation solutions to internet of things (I0T) modem and digital signal processor vendors and end IoT users.
Nestwave will adopt NextNav’s name and be integrated into existing TerraPoiNT engineering and technology efforts, with all Nestwave employees remaining with the company. Nestwave CEO Ambroise Popper will become NextNav’s vice president and general manager in France and is joining NextNav’s executive leadership team, while Nestwave CTO and Founder Rabih Chrabieh will serve as vice president of engineering.
The combination of NextNav’s technology with Nestwave’s LTE/5G capabilities will allow NextNav to intelligently combine signals from existing terrestrial LTE/5G networks with its own highly synchronized TerraPoiNT system to deliver near nationwide resilient 3D position, navigation and timing (PNT) capabilities that contribute to dramatically lower deployment costs.
The company serves markets including timing for critical infrastructure, aviation, automotive, IoT and other mass market applications sooner.
“The acquisition of Nestwave presents a unique opportunity for NextNav to optimize further the use of its existing spectrum bandwidth, while contributing to a drastic decrease of our TerraPoiNT system’s future capital and operating expenditures,” said Ganesh Pattabiraman, NextNav co-founder and CEO.
“By leveraging Nestwave’s unique technology and ambient LTE/5G waveform, NextNav can gain significant spectral efficiency, accelerate the availability of resilient PNT and release the underlying spectrum’s capacity for additional data-oriented services. An LTE/5G waveform also enables broader penetration of NextNav’s applications and technology across the handset and device ecosystem for all of its products and target markets,” Pattabiraman said.
Pattabiraman continued, “Nestwave brings not only a physical presence in Europe, but also a team of professionals who have established strong relationships with European Union representatives that will be beneficial as we continue active conversations with government officials in the United States, Europe and globally over GPS/GNSS resilience.
“The transaction is not expected to materially increase the company’s operational cash burn, and the lowered capital requirements will enable us to quickly scale our GPS resiliency capabilities in both the United States and global markets sooner than previously anticipated.”
ITU is the United Nations agency that deals with information and communications technology. Its remit includes coordinating spectrum use and satellite orbits.
ITU’s Radio Communications Bureau sponsors the World Radiocommunication Conference every three to four years. The issue of interference with GNSS signals was reported at the 2019 conference.
Since that time, according to this month’s circular, the group “has been informed of a significant number of cases of harmful interference to the radionavigation-satellite service…”
Despite concerns expressed by maritime and other interests, the circular focuses entirely on aviation interference. It says the reports it has received have been about “receivers onboard aircrafts and causing degradation or total loss of the service for passenger, cargo and humanitarian flights…” These have included “misleading information provided by RNSS [radionavigation satellite service] receivers to pilots.” An often cited example of this is a well-publicized 2019 incident in Sun Valley, Idaho. In that case a passenger aircraft nearly hit a mountain.
Describing interference with GNSS as a global and recurrent problem, the circular cites data collected by a major aircraft manufacturer. The company found “10,843 radio-frequency interference events … globally in 2021. The majority of these events occurred in the Middle East region, but several events were also detected in the European, North American and Asian regions.”
This year’s uptick in GNSS interference in Scandinavia, the Baltics, and around Ukraine since Russia’s February invasion of Ukraine is not mentioned. This is likely due, in part, to timing. ITU’s Radio Regulations Board met in March 2022 and directed the circular be issued.
Many within the positioning, navigation, and timing community have long asserted that interference with GNSS signals, whether deliberate or accidental, constitutes a violation of ITU rules and regulations. This month’s circular affirms this and cites several applicable provisions.
These include prohibitions on harmful interference with any authorized radio frequency transmission, requirements for users to transmit only in bands for which they have authorization, and for all to generally safeguard aviation operations.
The circular highlights provision 15.1 of ITU’s Radio Regulations as particularly applicable. It states:
“All stations are forbidden to carry out unnecessary transmissions, or the transmission of superfluous signals, or the transmission of false or misleading signals, or the transmission of signals without identification…”
As is the case with almost all international agreements, enforcement of ITU rules is the responsibility of its member states.
While most expect the advisory to have little immediate impact on reducing global interference with GNSS signals, it does help reinforce the issue as one of international concern.
According to a retired government official, “Member states that fail to comply with international rules to which they have agreed lose credibility and standing in the community of nations. Even when they have little credibility or standing to begin with, the behavior adds to their marginalization and life is just a little more difficult for them. This can, in the long run, nudge them toward being more responsible players.”
By Brandon Weaver, Gianluca Zampieri and Okuary Osechas
Innovation Insights with Richard Langley
IT’S A FACT. GPS and its brethren global (and regional) navigation satellite systems are susceptible to outages caused by both natural and engineered events. Several reports issued in the past couple of decades have documented the vulnerability of GNSS. Twenty years ago this past August, the U.S. Department of Transportation’s John A. Volpe National Transportation Systems Center issued a report, commonly referred to as the Volpe Report, in which they found that “GPS service is susceptible to unintentional disruptions from ionospheric effects, blockage from buildings, and interference from narrow and wideband sources.” Although not explicitly mentioned in the report, besides emissions from communications systems, wideband interference can come from solar radio noise storms overpowering GPS signals. The report also highlighted that the “GPS signal is subject to degradation and loss through attacks by hostile interests. Potential attacks cover the range from jamming and spoofing of GPS signals to disruption of GPS ground stations and satellites.”
The Volpe Report recommended a number of actions to mitigate the vulnerabilities of the GPS signal to disruption or loss, including the need for backups for positioning, navigation and timing — particularly for GPS applications involving the potential for life-threatening situations such as the loss of GPS use for safety-of-life navigation, which would include, for example, aircraft navigation.
With the introduction of GPS (and subsequently the other GNSS and their augmentations) and its widespread adoption by the aviation industry, legacy navigation systems such as Omega, aviation radiobeacons, VHF Omnidirectional Range (VOR) and Distance Measuring Equipment (DME), were either shut down, reduced in their number of installations, or displaced as the primary method of navigation. These systems could not offer the same capabilities as GNSS, and that has led to the high reliance now on GNSS for getting aircraft safely from one airport to another.
But as the Volpe Report pointed out, GPS and (by inference) all other GNSS are susceptible to outages, and so a reliable alternative PNT system that can be readily used for aircraft navigation is needed. Deutsche Flugsicherung, the German air traffic control organization, has proposed such a system, called Mode N. It builds on some aspects of existing navigation systems and aviation-certified signals not originally intended for navigation, including some used for communications and surveillance.
In this month’s column, a team of researchers from the German Aerospace Center introduce us to Mode N, looking at its signal format, required ground infrastructure, aircraft avionics and the potential position accuracy this system could offer.
To accommodate the continued growth of air traffic, air navigation service providers (ANSPs) are planning and implementing programs to increase the capacity and efficiency of airspace. These programs, which include the Next Generation Air Transportation System (NextGen) led by the U.S. Federal Aviation Administration (FAA) and the Single European Sky ATM (Air Traffic Management) Research Programme (SESAR) commissioned by the European Union, heavily rely on GNSS to enable certain capabilities to reach program goals. While intended to serve as the primary source of positioning, navigation and timing (PNT) for aviation services going forward, GNSS is vulnerable to sources of interference. For this reason, efforts have been taken to identify and develop an alternative PNT (APNT) system that can maintain capabilities supported by GNSS when a GNSS outage occurs.
The ANSP for Germany, Deutsche Flugsicherung (DFS), has proposed a concept for such a system that they call Mode N. The proposed design leverages current navigation and surveillance technology to provide a completely new solution to navigation. As the current APNT environment is filled with a variety of proposed solutions spanning the entire field of communications, navigation and surveillance (CNS) technologies, it is useful to describe Mode N within the context of these other APNT systems. This contextual description serves to highlight the interaction of Mode N with current aviation systems — an important consideration for any system intended to serve aviation users. Additionally, as the Mode N design uses similar technological principles as other navigation and surveillance systems, the extensive research performed for APNT can be applied to the Mode N design to provide a preliminary assessment of its navigation performance over Germany.
Development of APNT
The current state of aviation navigation can be simplified by acknowledging that GNSS has replaced legacy navigation systems such as Distance Measuring Equipment (DME) and VHF Omnidirectional Range (VOR) beacons as the primary method of navigation for aircraft. GNSS PNT services enable many capabilities in the airspace that are relied upon by modernization efforts to accommodate the expected increase in air traffic in a safe and efficient manner. Because of GNSS vulnerabilities outlined in the 2001 Volpe Report, it was recognized that an alternative system that could enable the same capabilities as GNSS would be necessary to continue safe and efficient operation of airspace as envisioned if GNSS is unavailable.
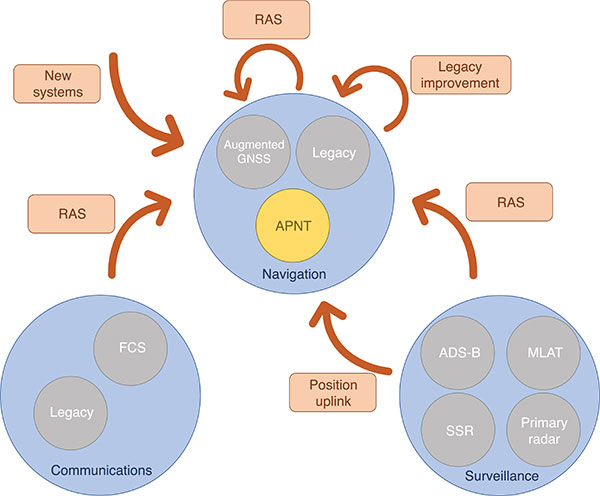
Proposed APNT solutions are generally sourced from the existing CNS environment. A common strategy is to use an aviation-certified signal not originally intended for navigation, which we have termed repurposed aviation signals (RAS). Other proposals include improving legacy systems, transmitting the ground-computed position to an aircraft, and creating new systems entirely. These sources of APNT are summarized in FIGURE 1 with explanations of the abbreviations to follow.
FIGURE 1. Sources of APNT for navigation. (Image: Weaver et al)
A natural candidate for APNT is the use of existing non-GNSS navigation infrastructure. Prior to GNSS, VOR beacons providing beacon-relative heading information and DME navaids supplying two-way range information were the primary navigation infrastructure. Improvement in DME avionics enabled tracking of multiple DME stations, providing a DME-only position solution referred to as DME/DME. Adding DME ground stations and upgrading existing hardware to increase accuracy and coverage of DME/DME positioning was therefore an attractive APNT option.
Another option sourced from the existing navigation infrastructure was to use RAS for positioning. One such RAS is that of the DME reply signal to a non-existent aircraft. By triggering DME responses in a desired fashion, aircraft can use the triggered responses for passive ranging without any change to the DME ground stations.
Communication systems for aviation are also undergoing modernization efforts. Future communication systems (FCS) are being developed to provide broadband communication capability between aircraft and controllers.
Surveillance is the domain of ground-based systems that determine the position of remote objects and is fundamental to allowing safe spacing of aircraft. Its origins reside in the development of primary radar, which was then complemented with secondary surveillance radar (SSR). Both primary radar and SSR use a rotating antenna to measure range and bearing to determine the location of the remote objects. Radar systems tend to be clustered around airports, limiting their area of coverage. To expand coverage in challenging terrain where radar is difficult to install, a technique known as multilateration is used, where a surveillance ground system can receive a signal from an aircraft and determine its position by comparing the time of arrival (TOA) of the signal between its ground stations. These systems were considered as a source of APNT by providing the aircraft position computed on the ground back to the aircraft via data uplink, but timely authentication and integrity concerns have stalled this approach in the United States.
Surveillance RAS for APNT. The other branch of surveillance-sourced APNT is by using RAS, and this is very relevant to the design of Mode N. The system providing many of the RAS for navigation is ADS-B. With this service, an aircraft broadcasts its GNSS-derived position (ADS-B Out) to ground-based stations and any aircraft capable of receiving ADS-B transmissions. ADS-B is an important part of airspace modernization strategies; it is mandated for aircraft operating in most U.S. airspace, with European mandates following suit. ADS-B ground stations, referred to as ground-based transceivers (GBT) or radio stations (ADS-B RS), collect ADS-B Out messages for use by air traffic operators. These ADS-B RS also provide their own transmissions for use by aircraft that can receive ADS-B broadcasts (ADS-B In capability) and include weather information, nearby air traffic and so on.
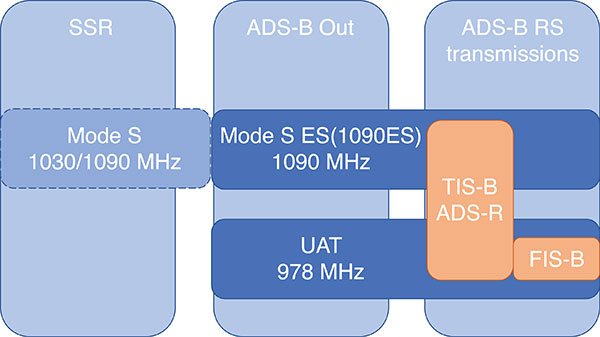
ADS-B can use different protocols to transmit its signals. The Mode S (S for selective) protocol was designed to allow SSR ground stations to selectively interrogate aircraft in their coverage area, reducing congestion on the reply frequency. The Mode S reply format consists of a four-pulse preamble and a data block containing either 56 or 112 information bits for the aircraft to provide information dependent on the interrogation received. Mode S is internationally standardized, and an extended format known as Mode S Extended Squitter was adopted for Automatic Dependent Surveillance Broadcast (ADS-B) services. Mode S Extended Squitter or 1090ES (as it’s transmitted exclusively on 1090 MHz) is also used by the ADS-B RS that rebroadcast ADS-B Out (ADS-R) and provide traffic information services (TIS-B) to nearby aircraft with ADS-B In capability.
Another protocol, used in the United States, is the Universal Access Transceiver (UAT) format. Like 1090ES, UAT is used by certain aircraft to transmit their ADS-B Out messages. Similarly, ADS-B RS transmits TIS-B and ADS-R messages with the UAT protocol; it also includes additional information that it transmits with the Flight Information Service – Broadcast (FIS-B). UAT signals are transmitted in the United States on an unused DME channel frequency of 978 MHz. FIGURE 2 summarizes the relationship between these surveillance signals and the services that use them.
FIGURE 2. Services using Mode S and UAT signal formats.(Image: Weaver et al)
Research investigating the ground-transmitted (ADS-B RS) 1090ES and UAT signals for ranging measurements greatly supports the assessment of Mode N presented here, as the Mode N system operates on a similar basis with a signal that blends characteristics of 1090ES and UAT.
Mode N Overview
Mode N (N for navigation) is a passive ranging system concept from DFS that seeks to provide APNT while reducing the spectrum congestion caused by existing aeronautical navigation and surveillance systems. The design includes the possibility for two-way and air-to-air ranging, but this overview focuses on the preferred passive mode of operation. It is designed around the Mode S format, which as mentioned, is used for SSR and ADS-B services. Despite early references to an SSR/N system, Mode N is not a new SSR mode but rather a new navigation system.
The basic concept is for Mode N ground stations to transmit on a single frequency signals that include ground station ID/coordinates, allowing aircraft with Mode N avionics to receive those signals and determine position in a similar manner to GNSS. As a single frequency is desired to minimize spectrum usage, the ground stations would space their transmissions apart to avoid intersystem interference. This scheme, known as time division multiple access (TDMA), would require information within the signal message on the scheduled time a ground station transmits, which the Mode N format allows.
Because Mode N shares many design aspects with Mode S, DME and other surveillance RAS, it is able to leverage previous APNT work for the benefit of its own analysis. Therefore, the overview of the design is described here relative to other APNT systems, as this is the basis of the preliminary performance assessment we present.
The Mode N Signal. The Mode N design proposes using the Mode S downlink signal format as the basis for its ranging signal to be used by the aircraft for passive position determination, with some key differences. The frequency channel on 1090 MHz is too congested to accommodate more signals; thus, the first difference is that Mode N intends to transmit on a different frequency. While the channel selection is still ongoing, unused DME channels have been identified as options for frequency allocation.
The second difference is the message content. As the Mode S downlink format transmits mainly aircraft-specific information, Mode N ground transmitters would instead populate their messages with information needed for passive ranging: ground station coordinates and time of transmission (TOT). The study of 1090ES messages (which also contain aircraft-specific information despite being transmitted by ground stations) as RAS required some special techniques to first identify which station was transmitting the message. The TOT is not present in 1090ES signals, but more importantly the time of transmission is not synchronized to any consistent reference. Aside from transmission frequency and message content, the Mode N signal design follows the Mode S downlink format (modulation, pulse shape and so on).
The Mode N signal also shares some aspects with the UAT signal, particularly the FIS-B segment. First, UAT is also transmitted in the United States on an unused DME channel. The FIS-B message, which provides weather information, transmits the ground station coordinates and information that can be used to estimate the TOT. Specifically, UAT messages are synced to UTC, and each ADS-B RS has a designated time slot within a one-second interval where it transmits its FIS-B message. This time slot is included in the message, and can be used to determine the TOT of the signal. Mode N is designed to work in this exact manner, minus the weather information. One crucial difference between UAT and the Mode N design is the type of modulation. Like Mode S, Mode N proposes using pulse-position-modulation (PPM) or on-off keying (OOK). The resulting wider bandwidth — estimated to be less than 4.6 MHz at –3dB — has better resistance to multipath, whereas UAT is frequency modulated to maintain a narrow bandwidth to avoid interference with DME and is more susceptible to multipath. Research on UAT signals for pseudoranging capability (also determined at a higher update rate than once per second) would be necessary for navigation, an important consideration for the final Mode N design.
Ground Infrastructure. The Mode N design, while based on RAS from the surveillance capability, requires new ground stations to transmit the Mode N signal. Requirements for the ground stations are that they provide adequate coverage to meet the requirements of an APNT system and that they are sufficiently synchronized in time. An initial time-synchronization scheme is the use of a radio frequency (RF) network consisting of the ground stations themselves, which requires radio line-of-sight of stations throughout the network. DFS performed a study and found that additional time-beacon stations would be necessary to maintain this RF time network, even though navigation coverage was provided using existing DME sites as hypothetical Mode N stations. Since these aspects of the design are still developing, the preliminary assessment we present assumes a network layout and time synchronization tolerance. As the Mode N design blends various CNS principles, a natural baseline design for the ground station locations consists of existing DME and surveillance sites in Germany. Using these locations for the ground stations enables computation of a horizontal dilution of precision (HDOP) at discrete locations throughout Germany. The assumed time synchronization is discussed further when developing a model of the Mode N ranging accuracy.
Avionics. An interesting aspect of the Mode N design is its proposed avionics unit. The Mode N avionics must be capable of receiving Mode N messages, which it can do with the existing DME antennas on aircraft. The Mode N avionics unit must then decode the messages for position determination. Its active mode for two-way and air-to-air ranging would require the Mode N avionics to transmit Mode N messages, again using the existing DME antenna.
Recognizing the continuing investment in the DME network by multiple countries, the Mode N avionics sensor is essentially built around a fully functional DME unit. This is intended to provide a seamless transition as Mode N stations are brought on line. The design of the avionics has little effect on the coverage assessment, aside from guaranteeing a minimum level of performance based on the current DME network, but is an important part of the implementation strategy. Furthermore, this blend of avionics has also been proposed for a unit compatible with DME and ADS-B (1090ES and UAT) signals.
Preliminary Coverage Assessment
Preliminary coverage assessments are a typical method to determine the feasibility of a proposed system to provide the required level of performance over a given area. A simple method of characterizing the position performance is in terms of the linear relationship between range error and DOP, where the range errors are assumed to be zero-mean, uncorrelated, and have identical distributions.
As the aircraft is assumed to have additional sensors for determining its altitude, HDOP is commonly used to characterize the expected horizontal position performance.
With range measurements, HDOP is a function of the transmitter geometry available to an aircraft at a given point. It is a straightforward computation to perform for a grid of points over the area of interest. The HDOP computation does depend on the type of range measurement, so passive (pseudo-) range, two-way range, and time difference of arrival (TDOA) measurements all have their corresponding DOP computation. Determining a model for the range error is less straightforward, and assessing the coverage potential of Mode N requires an estimation of the expected range error.
Modeling Mode N Range Accuracy. As Mode N is not an existing system, abundant quantities of real measurements are unavailable for empirically characterizing the range performance. However, since Mode N is heavily based on the Mode S signal format and functions similarly to the DME and UAT signals, which all exist and have been measured extensively, research investigating those signals can help derive the model for the Mode N range performance.
An alternate approach is to reference the standards for a specified performance level. For example, ICAO documentation specifies that the Airborne Collision Avoidance System (ACAS) logic use a zero-mean normal distribution range error model with a standard deviation of 50 feet, or about 15 meters. As ACAS also uses the Mode S signal format, this appears to be a reasonable source for the Mode N range error. However, since ACAS is an airborne two-way surveillance method, it does not exactly translate to a ground-based passive TDOA system such as Mode N. The 15-meter standard deviation is still useful, as it provides a check on the estimated Mode N accuracy. Other specifications suffer from similar drawbacks — Mode N does not directly apply to any single system. Thus, we apply the blended approach using previous APNT research.
The fundamental measurement for the passive ranging mode of Mode N is the TDOA between pairs of ground stations. This measurement is in seconds, and is translated to a range difference by using the speed of radio signal propagation in a vacuum. (See our conference paper for further details.)
Errors can be present in the TOA measurement, synchronization of the nominal TOT of the signals, and parsing of the time slot data field. The TOA measurement can have errors by inaccurate determination of the actual TOA due to noise or multipath and by the actual TOA differing from the nominal arrival time of the signal due to atmospheric delay. For terrestrial systems, propagation errors are considered to be dominated by multipath, so we don’t consider atmospheric effects here. Time synchronization errors are very important to the ranging accuracy, but it is assumed the time slot data field is parsed accurately. Other sources of error, such as inaccurate ground station coordinates, can affect the position error but have no effect on the range error. Additionally, the error originating from the change in aircraft position between reception of signals at ground stations is not considered in this article. The model of range accuracy can then be expressed as the root-sum-square (RSS) of the dominant individual error components.
We studied each error component in isolation, selecting the applicable APNT research to leverage based on the Mode N design aspect that most corresponds with that error.
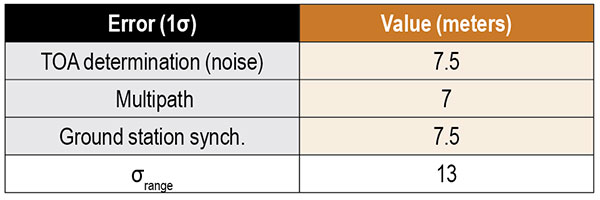
Since the Mode N design also uses a pulsed signal, the evaluation of DME (specifically, DME/N) ranging performance is the starting point for estimating the TOA noise error. Part of the APNT effort was evaluating current DME performance, as it was thought it exceeded the specified performance in standards. A study found that current DME performance allowed a budgeted TOA error of 15 meters, 2σ.
For the Mode N error model, a 7.5-meter error is an attractive option to choose as it is the average of two other sources and is the most recent. This value is a conservative estimate of the TOA accuracy for Mode N because the Mode N/S pulse shape is narrower than the DME pulse with a greater bandwidth, improving theoretical accuracy. For the preliminary coverage assessment, a conservative estimate is desired, because the actual TOA accuracy will vary over an area depending on transmitter distance — which impacts the level of signal noise. Note that the DME TOA errors are not divided by two as is done for the total DME error as they apply to a one-way TOA measurement.
After assessing the relevant studies, we modeled the multipath component of the error following that from Mode S as 7 meters, 1σ.
The final error component to estimate for Mode N is that of the synchronization of the ground stations. Based on the results from studies of the UAT signal and those from eLoran, we set a 15-meter maximum bias as a 2σ error component in the Mode N error model.
Our error analysis is summarized in TABLE 1.
TABLE 1. Predicted Mode N range accuracy. (Data: Weaver et al)
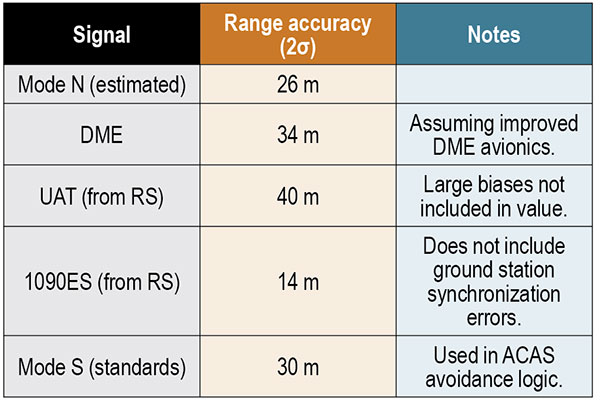
A total 2σ error for current DME performance of 92 meters has been established, which translates to 46 meters of range accuracy after dividing by two (since the DME signal is a two-way range). A substantial part of this error derives from the avionics bias, which is minimized for a “potential” DME error budget due to an assumed improved avionics performance. This results in a DME range 2σ error of 34 meters. We chose this value to compare as the effect of avionics has less of an impact in a passive ranging system such as Mode N.
Range performance for UAT signals was evaluated with measurements showing 20-meter (1σ) error when compared to GNSS truth, not including large biases attributed to ground station synchronization or processing errors. The 1090ES signals do not have an inherent ranging capability, so the TDOA measurement error of two ground station signals to one receiving station is difficult to measure. Instead, researchers have measured the differential TOA (DTOA) of one ground station signal received by two (GPS-synchronized) receiving stations to first identify which station transmitted the signal. When compared to the true DTOA based on ground station and receiving station coordinates, the measurements contained small biases around 10 meters with a standard deviation also less than 10 meters. Being DTOA measurements, these do not contain ground station synchronization errors, so the reported standard deviations correspond mostly with propagation and determining TOA. The 10-meter DTOA 1σ error can still be converted to a range error resulting in 14 meters (2σ). These results are summarized in TABLE 2.
TABLE 2. Comparison of Mode N with other APNT signals. (Data: Weaver et al)
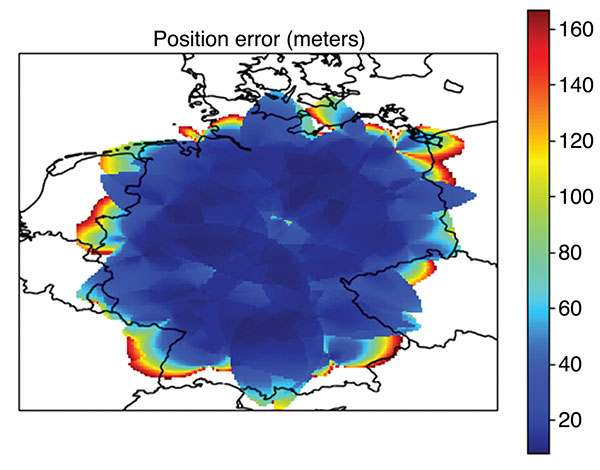
Coverage Assessment. With the estimated ranging accuracy, a preliminary coverage over Germany could now be assessed. Using the current 29 surveillance site locations in Germany and assuming that a minimum of three stations is necessary for positioning, the estimated position accuracy is shown in FIGURE 3.
FIGURE 3. Estimated position error (in meters) for aircraft within a 100 nautical mile coverage radius using existing surveillance sites as installation locations for Mode N ground stations. (Image: Weaver et al)
The coverage assessment used a “flat” Germany model with the estimated range accuracy from the preceding section (13 meters, 1σ). Atmospheric and terrain considerations were not applied in the assessment. It is important to note that this level of coverage would degrade at lower altitudes.
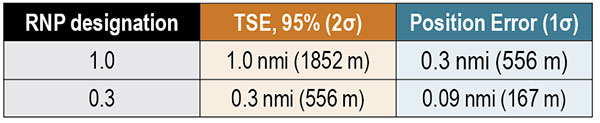
To determine whether this level of accuracy is sufficient for the airspace modernization efforts in Europe, the desired Required Navigation Performance (RNP) accuracy requirement must be examined. For RNP 1.0, where 1.0 refers to the required 95% or 2σ total system error (TSE) accuracy in nautical miles, the position error allocation is assumed to be 30% of the RNP/TSE value. The required position accuracy is shown in TABLE 3.
TABLE 3. RNP required horizontal position accuracy. (Data: Weaver et al)
From Figure 3, aircraft at altitudes within the service volume supported by a 100-nautical-mile coverage radius are capable of meeting the accuracy requirement for RNP 1.0 and 0.3 within most of Germany. Coverage along the border is unavailable as only German surveillance site locations were used.
Conclusions
Although our derivation of accuracy and the coverage assessment method we used made several simplifying assumptions, the results indicate that Mode N has the potential to be a feasible APNT system. To be a part of the modern airspace navigation infrastructure, additional accuracy requirements must also be met. The integrity requirement is harder to meet than accuracy, and requires either redundant information available to the aircraft for a receiver autonomous integrity monitoring-like algorithm or a ground-based monitoring/augmentation system. Perhaps the biggest challenge to implementing the Mode N infrastructure is maintaining an RF-based time synchronization network. Convincing aircraft operators to update their avionics is another challenge to Mode N implementation, although the inclusion of DME functionality in the Mode N avionics seeks to ease that transition.
DISCLAIMER
The views expressed herein are those of the authors and are not to be construed as official or reflecting the views of Deutsche Flugsicherung.
ACKNOWLEDGMENT
This article is based on the paper “An Overview of the Proposed Mode N System in the Context of Alternative Position, Navigation, and Timing (APNT) Development” presented at ION ITM 2021, the virtual 2021 International Technical Meeting of The Institute of Navigation, Jan. 25–28, 2021.
BRANDON WEAVER is a researcher at the German Aerospace Center (DLR) and works on alternative navigation systems.
GIANLUCA ZAMPIERI joined the Alternative Navigation Systems Group at DLR’s Institute for Communication and Navigation in 2019.
OKUARY OSECHAS leads the Alternative Navigation Systems Group in the Institute of Communications and Navigation at DLR.
GNSS is a critical single point of failure for navigation in the aviation industry. A new white paper published by Egis says it’s time for the industry to get rid of legacy navigation aids (NavAids) and catch up technologically with the rest of the communications industry.
Current navigation backups are ground-based navigation aids such as distance measuring equipment (DME). These use post-World War II technologies, with very low spectrum efficiency. Some might find it surprising to learn that they are still using Morse code.
While difficult to jam due to their strong signal, current navigation aids are not cyber secure. Due to their spatial distribution, they can be limited in their support to PBN (performance-based navigation) or any new concept of operations.
The horizontal positioning error was measured under 10 m, so the LDACS-NAV would easily meet RNP 0.3 requirements.
Legacy NavAids — NDB (non-directional beacon), ILS (instrument landing system), VOR (VHF omnidirectional range) and DME — all require a specific frequency band, various equipment, and airborne and ground antennas.
As a result, the average commercial airliner can carry around seven specialized navigation antennas, and as many as 20 when accounting for all the other communication, navigation and surveillance (CNS)functions. Having different radio systems is adding redundancy but makes the aircraft and the ground equipment very costly, as well as difficult to engineer and to maintain.
Two major problems could affect the aircraft industry. First, software-defined radio, and powerful low-cost radio systems are available to the public and any ill-intended person could interfere, deactivate or worse, divert these vulnerable systems from their purposes. Second, spectrum is a finite and fixed asset (aviation uses 14% of the total available spectrum).
Why hasn’t this problem been solved already?
There are no market incentives for air navigation service providers (ANSPs) and airlines to make expensive investments in ground infrastructures and aircraft retrofits. With an average lifetime of 25 years per plane, commercial fleets take a long time to be renewed.
Also, the aviation spectrum is protected, which has led to complacency and a lack of pressure to use the latest technologies to improve spectrum efficiency.
Stakeholder Coordination. States, ANSPs, airlines, airports, aircraft manufacturers, communications providers and system providers all have their own interests and perspectives, which increases the difficulty in developing and maintaining a global CNS roadmap.
Deployment. Once a roadmap is agreed on, the deployment challenge remains. For instance, the retrofit compliance date for ADS-B was pushed back from June 2020 to to June 2023 due to the pandemic. The capacity of aviation to evolve depends on when the operational and commercial benefits are clear, such as when GNSS was implemented for navigation.
The Human Factor. Human factors have to be considered for any critical change in aviation. Pilots are trained on navigation aids and GPS, and used to communicating by VHF voice with air traffic control officers. This is the reason why the evolution of navigation and communication systems must be seamless with current systems or require an in-depth human-factor risk assessment.
Potential Solutions
To future-proof aviation and performance-based operating procedures, aircraft need both a broadband, IP-based datalink capable of VoIP and a secure, cost-effective alternative positioning, navigation and timing (A-PNT) system as a back-up to GNSS. Today, GNSS backup is the 70-year-old DME — using the signals from multiple DMEs, aircraft can locate themselves with reasonable accuracy.
The main choices to replace the DME are either an enhancement of DME systems (Multi-DME RAIM, eDME, Mosaic DME) or an A-PNT solution (LDACS-NAV, WAM-TISb, SSR mode N, eLoran).
If we look at the most mature solutions, the DME/eDME and the LDACS-NAV are the main options, and they represent a real dilemma.
DME/DME. This solution represents the best GNSS backup currently available. One possibility is to improve the signal to improve accuracy. Other improvements would allow the detection of more than two ground stations, or even receiver autonomous integrity monitoring (RAIM) capability. Only small improvements need to be made to the signal and to the FMS (Flight Management System), making it the option requiring the least effort and expense.
However, to reach a reliable Required Navigation Performance (RNP) standard of RNP 0.3, additional distance measurements are required, especially at low altitudes, and more DME facilities might be needed. Plus, this solution does not provide a secure, integrated communication and navigation solution and does not improve spectrum efficiency.
LDACS-NAV. The L-band digital aeronautical communication system (LDACS) for continental ground communication is an IP-based data-link solution with a built-in navigation capability. It uses orthogonal frequency-division multiplexing, organized as a cellular network and sharing features with 3G and 4G. It works by detecting signals of opportunity within the communication exchange, and then multi-laterating the signals from at least four ground transmitters to calculate an airborne position. The frequency is ingeniously placed in the L-band between each DME frequency. It is built with interference mitigation algorithms and minimizes out-of-band radiation to protect DME.
This solution is spectrum efficient, cybersecure, doesn’t require additional frequency assignment, and is scalable and adaptable to local needs. Given LDACS is almost certain to be implemented in communications to replace VDLM2, using this capability would be an easy choice for navigation.
Features like air-to-air ranging, surveillance or enhancements to DFMC GBAS are possible. Also, additional navigation information can be transmitted, such as trajectory-based operations and 4D trajectories.
Both Frequentis AG and Leonardo SpA have built fully functional and interoperable prototypes. In March 2019, the German Aerospace Centre (DLR) tested LDACS. The flight campaign showed its capabilities in practical scenarios with industrial demonstration equipment. The horizontal positioning error was measured under 10 m, so the LDACS-NAV would easily meet RNP 0.3 requirements.
ICAO Recognition. An International Civil Aviation Organization (ICAO) standardization group has started work on LDACS for both communication and navigation. The LDACS-NAV will first be used to augment the DME system.
More Study Needed
To fully validate the LDACS-NAV concept, further studies and large-scale demonstrations must be conducted, and a cell-planning study needs to determine the number of necessary ground stations.
Also, a detailed cost/benefit analysis must be undertaken to evaluate the cost of an EU-wide LDACS-NAV network. It would take into account the manufacturing and deployment costs of ground stations as well as equipment costs of multi-mode LDACS/VDL avionics, identifying whether it can support navigation functions.
Also studied should be the benefits of having a GNSS back-up system, equipage costs of a dedicated avionic system and the direct operational benefits of providing a reliable, low latency and cost-efficient communication and navigation network for all aviation stakeholders, including secured proprietary information for airlines and aircraft manufacturers, and including full 4D trajectory-based operations and flight-centric air traffic management for ANSPs.
If both the cell-planning study and the cost/benefit analysis suggest a positive economic advantage to implement the LDACS system compared to the current system or the other potential A-PNT solutions, then European institutions could select LDACS as the official long-term A-PNT solution in the CNS Roadmap & Strategy and enable the SESAR Operational Concept high-level goals. This would help accelerate the standardization and industrialization activities to resolve the current lack of redundancy in our CNS systems.
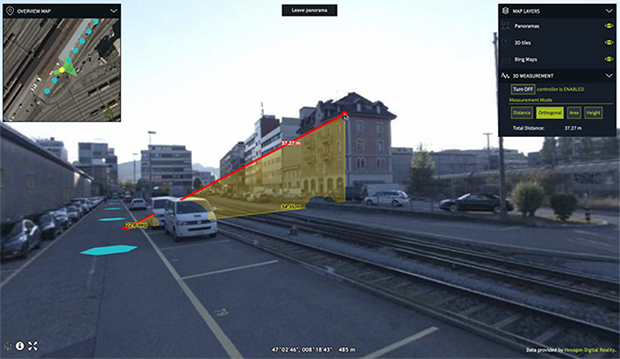
Luciad 2020.1 provides capabilities with panoramic imagery. (Screenshot: Hexagon Geospatial)
Luciad 2020.1 features dynamic panoramic imagery capabilities and immersive 3D imagery
Hexagon’s Geospatial division has launched Luciad 2020.1, a significant update to its platform for building advanced location intelligence and real-time, situational awareness applications.
Luciad 2020.1 delivers immersive 3D experiences with 360-degree panoramic imagery support that can be combined with other 3D data layers for geospatial applications. The latest release also features additional styling for 3D meshes and 3D data integration capabilities.
Visualization and Analysis
Hexagon’s Luciad portfolio allows developers to create powerful, high-performance applications that leverage data from any source for visualization and analysis in 2D and 3D. Combining static, dynamic and real-time data, including moving tracks, Luciad-powered applications support defense, aviation, infrastructure and other critical sectors.
For the 2020.1 release of LuciadRIA, which is used for building browser-based solutions, Hexagon has added 360-degree panoramic imagery capabilities that can be combined with other 3D data layers to provide complete imagery coverage and detailed information about a location. Panoramic imagery puts users in control of what they want to look at within an image. The panoramic 3D experience is powered by a new streaming imagery data service in LuciadFusion, Hexagon’s OGC-compliant server solution.
“With the addition of panoramic imagery capabilities and other 3D data enhancements, Luciad 2020.1 puts local governments, transportation departments, utility companies and others in control of what they can observe and analyze within a particular scene,” said Mladen Stojic, president of Hexagon’s Geospatial division. “With these capabilities, organizations can remotely monitor their assets and infrastructure, significantly reduce manual inspection processes and fully leverage location intelligence across the enterprise.”
More New Features
The release contains other new features and improvements requested by customers, including:
military grid coordinate transformations
non-georeferenced WebGL-based views
improved imagery sampling
additional format support and upgrades.
For defense customers, the Luciad 2020.1 release consolidates its military symbology support across all Luciad platforms and programming languages.