The GEOINT Symposium, hosted annually by the United States Geospatial Intelligence Foundation (USGIF), returns to Tampa, Florida, April 22-25.
The annual symposium gathers the defense, intelligence and homeland security communities as well as other users and producers of geospatial information for keynote speakers, panel discussions and breakout tracks offering the opportunity to learn from senior leaders and subject matter experts.
Confirmed keynote speakers include:
Robert Cardillo, Director, NGA
The Honorable Susan M. Gordon, Principal Deputy Director of National Intelligence
Dawn Meyerriecks, Deputy Director, CIA Science and Technology Directorate
Gen. Raymond A. Thomas III, Commander, USSOCOM
A complete list of GEOINT leaders who will be speaking throughout the event can be found here.
GEOINT 2018 is expected to draw more than 4,000 geospatial professionals and well in excess of 200 exhibitors. For complete symposium details, visit www.geoint2018.com.
Spatial analytics company Esri has acquired technology from ClearTerra, a company that offers geospatial and activity-based intelligence tools.
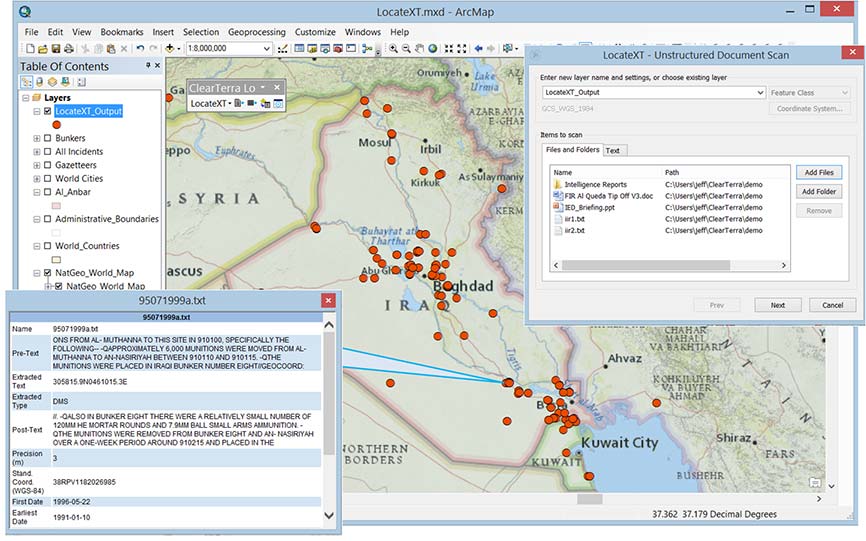
The acquisition will provide ArcGIS platform users the ability to easily discover and extract geographic coordinates from unstructured textual data like emails, briefings and reports, instantly generating intelligent map-based information.
This capability will make mapping this elusive information easier across many industries. Defense, intelligence and public safety organizations tend to have massive volumes of unstructured data, as do other fields, such as petroleum, utilities and maritime, where locating information on the Earth is not as easy as searching for a street address.
Esri’s acquisition of ClearTerra technology brings workflow-enhancing software technologies into the ArcGIS platform.
“We have been close partners with Esri for a number of years,” said Jeff Wilson, former vice president of sales for ClearTerra, now an executive for defense and intelligence with Esri. “Esri has the platform and resources to provide a solid path going forward for our technology, allowing us to expand this capability to the global market.”
ClearTerra LocateXT technology allows analysts to rapidly scan through documents without having to spend hours reading, copying, pasting and running spreadsheet formulas, placing the results instantly into geospatial features.
Additionally, ClearTerra FindFZ technology provides enhanced search capabilities for the ArcGIS platform, incorporating the powerful techniques found in internet search engines, including a tolerance for misspelled words, as well as wildcard and Boolean logic searches.
The LocateXT extension for ArcMap is used to extract locations from unstructured data (messages, reports, briefings) into a geodatabase feature class. (Image: ClearTerra)
“We are excited to bring ClearTerra technology into the Esri family,” said Jeff Peters, Esri director of national government. “The unstructured data tools are powerful not only for those who have made use of this technology for a number of years, such as in the military, but it also has useful applications for so many more Esri users.”
ClearTerra has been an active member of the Esri partner program, providing their software to ArcGIS users via desktop, server, and the cloud. Support and maintenance for the software will continue via Esri with no interruption of service, and is readily available for licensing.
ClearTerra specializes in geospatial and activity based intelligence software products, custom solutions, technical services, consulting and training. ClearTerra is a business unit of ClearShark.
The military is always looking at new techniques and technology for deriving position and, it seems, every few years signals of opportunity (SOOP) becomes fashionable again.
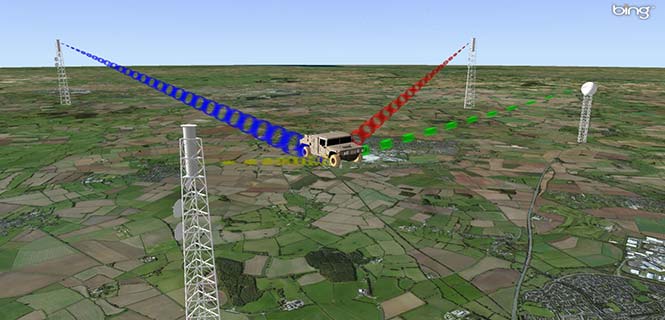
In broad terms, SOOP refers to the use of any signals for navigation, which are not normally intended for navigation. This might mean TV or radio broadcast signals, cellular network signals, or anything else you can receive.
Figure 1. Navigating using opportunistic signals, such as phone, TV and radio transmissions. (Image: Michael Jones)
The promise of SOOP
In the quest for resilient positioning and navigation, SOOP certainly sounds attractive. When GPS goes down, why not simply continue to navigate by receiving digital TV signals instead? Why not receive a whole pile of different signals, and make yourself virtually immune to jamming?
You can even turn jamming from a problem to a solution. If someone does decide to turn on a bunch of jammers, why not use the jammers themselves as signals of opportunity, and position yourself using those? With so many possibilities, it’s no wonder SOOP excites people. Certainly it’s of great interest to the military of many countries.
Let’s dip our toes into the world of opportunistic navigation.
What signals might we use?
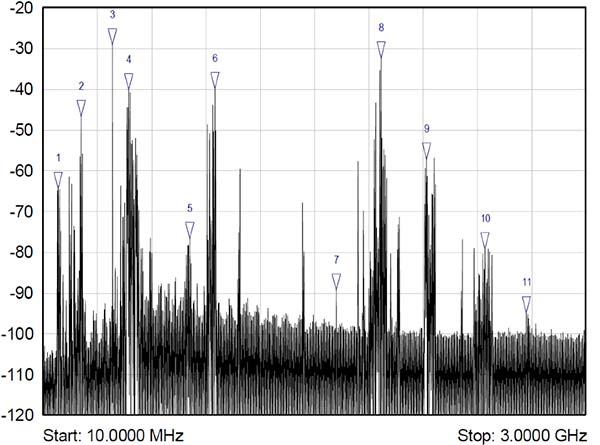
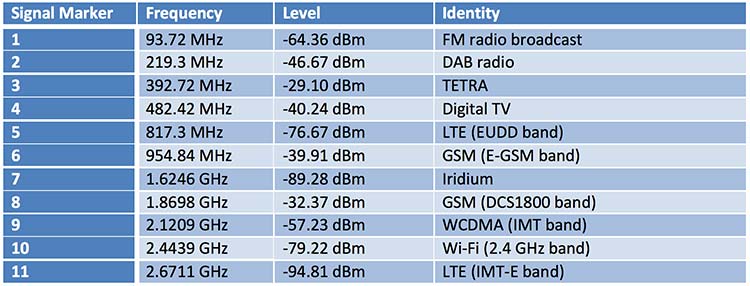
The figure below shows what we get if you use a spectrum analyzer to quickly sample what’s on the airwaves in the UK, in this case looking fairly coarsely from 10 MHz to 3 GHz. A number of candidate signals immediately present themselves, which are labeled 1 to 11 and identified in the table.
Figure 2. Plenty of opportunistic signals are out there. (Image: Michael Jones)
There are, of course, many more signals-of-opportunity out there, but this illustrates a few of the more visible ones. How do we go about using these signals for positioning ourselves?
Bringing in defense techniques
For decades, one of the principle requirements in electronic warfare (EW) has been to geolocate enemy transmissions. This has given rise to a plethora of techniques for determining location, such as received signal strength (RSS), angle-of-arrival (AOA), time-of-arrival (TOA), time difference of arrival (TDOA), frequency difference of arrival (FDOA), and so on.
In a positioning application, we have the reciprocal problem: instead of trying to geolocate a transmitter relative to ourselves, we are trying to geolocate ourselves relative to a set of transmitters. But of course we use the same techniques: GPS is an excellent example of a TOA system.
Let’s look at the basics of TDOA. A signal s arriving at location 1 can be expressed as
where A1 is an amplitude scaling to account for attenuation over the path, n1 is additional noise, and d1 is the signal delay time. We can repeat the equation for further locations:
Usually we designate one location as the reference, in which case we can rewrite the above equations as:
The first problem is to determine D, the time difference of arrival. There are many ways to do this, but a popular method is to perform generalized cross-correlation:
Or, in a realizable digital form:
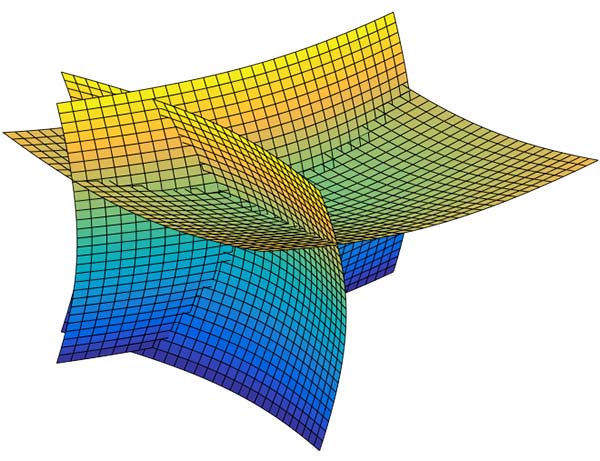
Finding the peak of this function gives us our estimate of the time difference D. It’s a little bit more involved in practice, as we would normally apply filtering functions to improve the TDOA resolution, but you get the idea. Each TDOA measurement gives a set of possible locations that form a hyperboloid. With three stations, we will have two hyperboloids, the intersection of which gives a set of possible locations along a hyperbola. The addition of a fourth signal allows us to plot three hyperboloids, from which we can then determine position.
Figure 3. Positioning using TDOA involves solving for the intersection of hyperboloids. (Image: Michael Jones)
There are various ways to solve for the hyperbolic intersections. With only four measurements it is possible to compute the solution analytically, but with many measurements an iterative approach or minimum mean squared error technique is often used.
TDOA, when used properly, can form the basis of a highly accurate positioning system. A number of navigation systems utilize TDOA technology, such as LORAN and its variants.
Now let’s consider angle-of-arrival. AOA techniques generally make use of an antenna array to provide spatial diversity, allowing the direction of a source transmission to be determined. Measured angles to multiple transmitters then allows triangulation to be performed and the position computed. There are some advantages to AOA techniques, when compared to TDOA: position can be computed with as few as three signals, there is no requirement for time synchronization in any form, and narrowband signals can be used without loss of accuracy. Disadvantages include larger physical size due to the use of an array of antennas, and potentially more susceptible to environmental effects such as multipath.
Classical AOA methods include Capon’s method, but since the 1980s the preferred techniques have often been signal subspace methods such as Multiple Signal Classification (MUSIC), Estimation of Signal Parameters by Rotational Invariance Techniques (ESPRIT), and variants of these techniques. The most well known of the subspace methods, MUSIC, performs an eigendecomposition of the sample covariance matrix given by:
Once the signal and noise eigenvectors have been separated the array manifold is projected into the appropriate subspace to yield the MUSIC surface:
The peaks of the function P, give us the direction-of-arrival of any signals. From these multiple lines of bearing we can perform triangulation, and derive our position.
We’ve looked at TDOA and AOA methods, which are just two of many techniques that can be used to process signals-of-opportunity to derive position. But there are some perceived drawbacks to navigation by SOOP. By definition, SOOP makes use of transmitters that are uncooperative, and not generally designed with navigation in mind.
For TDOA you are dependent on signals that are transmitted synchronously (or else you need a separate source of reference), which may or may not be the case. You also need to know the locations of the various transmitters, for example the coordinates of any GSM base stations, digital TV transmitters, and so on. It may be difficult to obtain this information, especially in some parts of the world. But whilst it certainly helps to have this information, it isn’t entirely necessary. It is possible to both position yourself, and build up a map of the transmitter locations, without a-priori information.
SLAM
Simultaneous localization and mapping (SLAM) is a field popular in the autonomous vehicle and robotics communities. It’s often described as a machine-learning concept, which aims to solve the problem of positioning oneself within a map, whilst simultaneously constructing and updating that map. There are a pile of techniques and algorithms that have been applied to the problem, including the good old Kalman filter, and the particle filter.
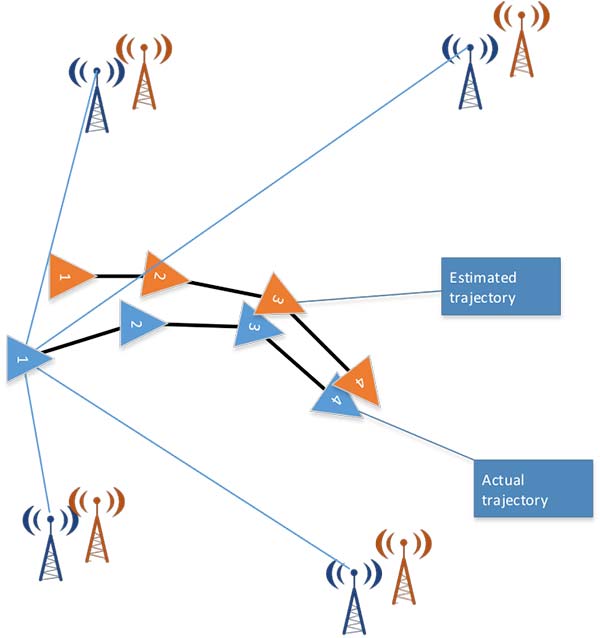
In basic SLAM, you use a state vector to store an estimate of your position (and often orientation as well), just as you would in a typical GPS receiver. However, in SLAM, we also store estimates of the transmitter positions (called “features” in SLAM terminology). If we want to localize ourselves in a global coordinate frame it does mean we need an initial estimate of our position from some other means, like GPS. Otherwise we can only localize ourselves within the map we are generating.
From our initial position estimate, we then move in some way. We then estimate our position again, perhaps using some form of dead reckoning technique, like inertial or visual odometry. Together with our motion model, this forms the prediction phase of the Kalman filter. We perform the measurement phase by re-measuring any features (our transmitters of opportunity), along with any new ones.
Figure 4. Basic SLAM concept: simultaneously estimate the locations of both the vehicle and the transmitters of opportunity. (Image: Michael Jones)
If you know about Kalman filters, you might spot one of the problems with SLAM: As the number of features increases, the size of the state vector becomes larger, until you end up with huge matrices that are very time-consuming to solve. The solution time is a quadratic function of the number of state variables. For this reason, it is often necessary to constrain the problem in some way: perhaps by limiting the number of transmitters we keep track of.
But when done properly, SLAM is a powerful technique for signals-of-opportunity navigation.
Is SOOP worth it?
We’ve seen that, by using a variety of techniques, almost any radio signal can be used for opportunistic navigation purposes.
One disadvantage of SOOP is that it can require complex hardware to do it well. If you truly want to use all the opportunistic signals out there, then you need a receiver that can handle a very wide range of frequencies. You also need an antenna or set of antennas that can do the same.
When resilient PNT is a critical military requirement, you cannot afford to rely on signals that you don’t control. SOOP is also highly dependent on where you are. There aren’t many opportunistic signals at sea or in the desert, compared to in the urban environment (perhaps the odd satellite signal, or HF signal).
So SOOP is unlikely to become a primary technology for the military. But it does have the potential to be a powerful augmentation to GNSS, and it certainly deserves a place in the PNT kit bag.
The Republic of Korea Agency for Defense Development (ADD) has selected SimActive’s Correlator3D software. The agency’s use of the software will include processing UAV and satellite imagery.
The transaction was facilitated through a SimActive partner in the region, GeoFocus Inc.
“The software was originally developed for military clients, which is reflected in the processing speed and rigorous mapping standards the technology adheres to,” said Philippe Simard, president of SimActive. “We are proud to welcome ADD as they join governments worldwide using Correlator3D.”
Long established as a key component within defense applications, navigation technology from Honeywell is now available to a wide range of new industries that can benefit from the advanced precision and performance of reliable, rugged and easy-to-install inertial measurement units (IMUs).
Honeywell’s newest IMU offering — the HG4930 — applies the principles of reliability, dependability and performance from aerospace and defense. It’s tailored for “straight out of the factory” integration and use in various non-defense and non-aerospace industrial applications, the company said.
Applications include autonomous vehicles, surveying and mapping, ground and underwater robotics, unmanned aerial vehicles and gimbal stabilization.
IMUs help people, vehicles and machines measure motion and calculate changes in position, anywhere in the world, even where GPS signals are intermittent. In industries where automation is taking hold and working conditions where GPS may be out of touch, an IMU can help fill in the moments of disconnect and keep things like an autonomous underwater vehicle or a robot in a factory informed about how they are moving relative to their surroundings.
“For more than a decade, we’ve designed our IMUs to perform in the extremely harsh and demanding environments for our aerospace and defense customers,” said Chris Lund, senior director, industrial IMUs, Honeywell Aerospace. “But there is no shortage of possibilities for how that same IMU technology can support a wealth of markets hungry for the next level of enhanced navigation and control. The HG4930 tactical grade IMU is a highly competitive and cost-efficient variant of our industry-leading navigation technology. Whether helping your industry evolve toward autonomy or augmenting a platform or solution’s precision in domains where GPS is unreliable, the HG4930 delivers the needed performance.”
In addition to the HG4930 IMU being an extremely small, lightweight and low-power product for spearheading new uses or bolstering current navigation capabilities, Honeywell’s HG4930 IMU is not classified under an International Traffic in Arms Regulation category, but instead is free from the burden of an export license for all but a few military-related use cases. This means a broader availability for customers around the world.
With more than 500,000 tactical-grade IMUs produced to date, the HG4930 builds on a proven Honeywell legacy of reliable inertial technologies. According to Honeywell, it is the highest-performing microelectromechanical system (MEMS)-based IMU of its size and price, and benefits from world-class inertial sensor development, calibration and compensation.
The HG4930 has been tailored to provide significantly improved gyroscope and accelerometer performance for the environments and use cases experienced by non-aerospace and non-defense users.
For industries that depend on less reliable MEMS or large, power hungry and expensive fiber-optic gyroscopes for navigation and control capabilities, the HG4930 offers three off-the-shelf performance grades for easy replacement and new capability.
DARPA’s OFFensive Swarm-Enabled Tactics (OFFSET) program envisions future small-unit infantry forces using small unmanned aircraft systems (UAS) or small unmanned ground systems (UGS) in swarms of 250 robots or more to accomplish diverse missions in complex urban environments.
By leveraging and combining emerging technologies in swarm autonomy and human-swarm teaming, the program seeks to enable rapid development and deployment of breakthrough capabilities to the field.
DARPA has awarded Phase 1 contracts to teams led by Raytheon BBN Technologies and Northrop Grumman Corporation.
Image: DARPA
Swarm Tactics. Both teams will serve as a swarm systems integrators tasked with designing, developing and deploying an open architecture for swarm technologies in physical and virtual environments.
Each system would include an extensible game-based architecture to enable design and integration of swarm tactics, a swarm tactics exchange to foster community interaction, immersive interfaces for collaboration among teams of humans and swarm systems, and a physical testbed to validate developed capabilities.
The teams will be responsible for experimentation and systems-integration efforts for realizing swarm capabilities, including producing tactics and technologies to test on its respective architecture.
Swarm Sprints. DARPA also aims to engage with a wider developer and user audience through rapid technology-development and integration efforts called swarm sprints. Participants in these experiments — sprinters — can work with one or both integration teams and each other to create and test their own novel swarm tactics and enabling technologies.
Roughly every six months, DARPA plans to solicit proposals from potential sprinters, with each swarm sprint focusing on one of five thrust areas: swarm tactics, swarm autonomy, human-swarm teaming, virtual environment and physical testbed.
The end of each sprint would coincide with physical and virtual capability-based experiments designed to test and assess integration of the thrust-specific OFFSET technologies. The experiments would also provide direct engagement between DARPA, the teams and sprinters, and warfighters who could help further tailor OFFSET capabilities to meet real-world operational needs.
“The swarm sprints are empirical experiments designed to accelerate our understanding of what swarms can do in urban environments,” said Timothy Chung, program manager in DARPA’s Tactical Technology Office. “By having swarm sprints at regular intervals, we’re able to ensure that we’re keeping up with the latest technologies — and are in fact helping inform and advance those technologies — to better suit the needs of the OFFSET program. Given the wide range of capabilities that we’re interested in, we’re looking for wherever those innovative solutions are going to come from, whether they be small businesses, academic institutions or large corporations.”
A conference aimed at military and government agency decision-makers is scheduled for Feb. 6–8.
AUVSI Unmanned Systems – Defense. Protection. Security. (USDPS) will highlight what’s next for the defense, protection and security industries. The conference has been reimagined to include more opportunities to learn from industry and government thought-leaders and shop for the latest technology, said AUVSI.
Expanded focus beyond the military includes government agencies such as Homeland Security, Interior, Justice, Energy, the FBI and NOAA, as well as other public safety agencies.
Thought leaders and subject matter experts from the military, government agencies and public safety outlets will provide details and insight on investments, innovation and sustainment, including what’s next with artificial intelligence and cybersecurity.
More than 50 companies will be on site to provide military and government agencies with an inside view of new technologies and trends.
In addition, a public safety educational lineup defines how to best use unmanned systems for explosive ordinance disposal and HAZMAT applications, addresses the counter-UAS threat at home and abroad, and provides insight on how disaster and emergency responders are using unmanned systems.
The conference will take place at the Gaylord National Resort & Convention Center in National Harbor, Maryland. Those registering before Nov. 19 can take advantage of advanced rates.
Orolia, through its Spectracom brand, has launched VersaPNT. VersaPNT provides virtually failsafe battlefield navigation, even in GPS-denied environments, to protect critical networks with Assured PNT technology, the company said.
The new, ground, air or sea vehicle-mounted solution is designed for military environments, with a ruggedized, compact, low-power and lightweight form factor.
Today, military vehicles are portable networks, providing seamless connections with U.S. headquarters, regional command posts and individual soldiers. Remote areas are challenging environments for military networks, and enemy forces are jamming, spoofing and disrupting operations.
“VersaPNT provides continuous mission assurance and C4ISR support, even in hostile environments,” said Rohit Braggs, Orolia vice president, PNT networks and sources. “This innovative technology solution protects critical networks for complex military and homeland security land, air and sea operations.”
Every minute counts on the battlefield, and VersaPNT provides critical decision support with real-time situational awareness to facilitate a rapid response, according to the company. This lifesaving technology can also help keep soldiers and civilians out of harm’s way, while ensuring continuous tracking of friendly and enemy forces.
VersaPNT provides essential command and control, navigation, communication and electronic intelligence support for U.S. and allied military, homeland security, first responder, civilian agency, special operations and intelligence missions.
Demonstrations are available at the AUSA Annual Meeting, Orolia Booth #2944.
Microsemi Corporation’s new SyncServer S650 SAASM server incorporates a Selective Availability Anti-Spoofing Module (SAASM).
The SAASM capability provides a highly secure, accurate and flexible time and frequency platform for synchronizing mission-critical electronics systems and instrumentation applications in the defense market, such as satellite communications and defense operational infrastructure, the company said.
Military Grade. The new SyncServer S650 SAASM, designed for use by the U.S. Department of Defense (DOD) and other government agencies as well as their approved suppliers, received the GPS Directorate Security Approval to incorporate a military-grade, GPS SAASM receiver module.
Microsemi SyncServer S650 SAASM Time and Frequency Server.
This enables U.S. armed forces to confidently deploy features of Microsemi’s popular commercial SyncServer S650 in a military-grade configuration. In addition, the integrated SAASM module adheres to industry standards allowing for a migration path to GPS Military Code (M-code) support.
“Our key military and DOD-related customers require flexible, secure and extremely reliable time and frequency technology for their most critical applications, which they have come to rely upon from Microsemi. Enabling support for SAASM provides the extra security and reliability necessary for this market,” said Randy Brudzinski, vice president and business unit manager of the Frequency and Timing Division at Microsemi. “The addition of the SyncServer S650 SAASM to our product line further demonstrates Microsemi’s commitment to providing the highest quality time and frequency technology in support of vital government programs.”
The SyncServer S650 SAASM is a highly versatile time and frequency system with the company’s FlexPort technology for multiport, user-definable output signal configurations for time codes, pulses and a variety of signal types essential for system synchronization.
This makes the SyncServer S650 SAASM ideal for DoD electronics system engineers synchronizing mission-critical, system-level instruments. This is coupled with Microsemi’s NTP Reflector technology for robust security, accuracy and reliability of network-based time services such as Network Time Protocol (NTP) and Precision Time Protocol (PTP).
Resilience to Threats. According to a 2017 GNSS Market Report, global navigation satellite system (GNSS) jamming and spoofing are specifically identified as increasing and notable cybersecurity threats to critical infrastructure.
Furthermore, resilience to these threats has become mandatory by critical infrastructure policy makers and GNSS receiver manufacturers. Without the use of SAASM technology in the presence of these threats, deliberate or unintentional, the most mission-critical systems operated by the DOD may be subject to the side effects of degraded time and frequency performance.
Microsemi’s new SyncServer S650 SAASM is designed to generate precise time and frequency signals to synchronize high bandwidth mission-critical communications systems and critical infrastructure requiring the highest levels of security support.
In addition to offering superior low phase noise performance, the device is compliant with the Joint Chiefs of Staff SAASM GPS mandate and developed for authorized military users only.
Surrounding sounds may not be a common way of determining location. But on the battlefield, warfighters need to know the direction of gunshots to enable a proper response.
Weighing 12 ounces, the Boomerang Warrior-X by Raytheon BBN Technologies provides immediate hostile fire location awareness to individual soldiers and gives unit leaders shooter grid coordinates, according to the company. These situational awareness enhancements improve coordinated team responses to hostile fire.
Incoming shot announcements are transmitted to a built-in speaker or an earpiece while a lightweight display provides range and azimuth of the shooter position. As the soldier moves, the system compensates for the soldier’s motion and continually updates the threat’s location on a wrist display.
The Boomerang Warrior X system.
This summer, an undisclosed Gulf nation has awarded a direct commercial sales contract to Raytheon BBN Technologies valued at more than $10 million for the delivery of 2,000 Boomerang Warrior-X systems during the next 12 months.
“This technology is a proven life saver on the battlefield,” said Ed Campbell, president of Raytheon BBN Technologies. “Boomerang delivers the best performance of any available shooter detection system today at the lowest cost.”
Raytheon BBN Technologies is a wholly owned subsidiary of Raytheon Company.
The German Ministry of Defense selected Rockwell Collins’ NavHub navigation system to provide GNSS availability to a variety of its military vehicles.
The NavHub system serves as a next-generation GNSS- and Military-code (M-code)-enabled solution for the German Armed Forces.
Customizable for ground and maritime platforms, NavHub provides a variety of vehicle interfaces, meets the standards required by military vehicle operators, and allows users to receive data from multiple secure and open-service GNSS constellations to simultaneously confirm the navigational solution.
Access to multi-constellation GNSS and GPS M-Code will provide a significantly enhanced navigational solution over the current GPS-only solution.
Work under the contract will be performed in Rockwell Collins’ facilities in in Europe.
About the NavHub GNSS navigation system
NavHub (Image:: Rockwell Collins)
Based on Rockwell Collins Selective Availability/Anti-Spoofing Module (SAASM) GPS receivers, NavHub is strategically designed to meetfast-moving and demanding combat environments.
Through the use of dual-installed GNSS receivers, NavHub provides an assured navigational solution, interfaces and GNSS upgrade path to support modern operations platforms.
SAASM security (expansion to M-code), expansion to multi constellation GNSS
Extended platform interfaces, including Ethernet, USB and CAN
Extended performance in a jammed environment (i.e., 41 dB while tracking and 24 dB during initial acquisition)
“NavHub meets the critical mission need for accurate navigation support for fast-moving platforms and challenging environments,” said Claude Alber, vice president and managing director, Europe, Middle East and Africa for Rockwell Collins. “Our military GNSS receivers will provide significantly enhanced navigational capabilities to military vehicles and will mitigate terrain, forest and urban degradation as it will raise the number of satellites used from 28 to well over 100.”
By Christopher Ball, 412th Test Wing Public Affairs
What happens when GPS isn’t available?
A collection of U.S. Department of Defense units and universities found out when they gathered at Edwards Air Force Base, California, to evaluate various aerial platforms in a degraded GPS environment this summer.
The week-long test event called DT NAVFEST — short for Developmental Test Navigation Festival — was the first large-scale program of its kind, according to James Cook, KC-46A project manager with the 418th Flight Test Squadron.
“DT NAVFEST was established to provide a locally more realistic GPS jamming environment in which aircraft platforms and unmanned aerial vehicles could evaluate their performance under a degraded GPS signal,” Cook said. “Other locations around the U.S. provide such environments, but having it locally allowed for direct program input and cost savings to customers by not having to deal with the logistics costs of deploying to those locations.”
Cole Johnson, technical lead for NAVFEST, explained how they create a degraded GPS environment.
“GPS signals are super faint,” he said. “Imagine a 30-watt lightbulb 12,000 miles in space. So it doesn’t take much interference for your smartphone’s GPS to lose lock on such a low power signal. Interference could occur from walking in a dense forest, through a canyon, inside a building, driving among skyscrapers, or from GPS jammers. The end effects of GPS jammers aren’t much different than the other causes of interference, they all make it harder for your GPS receiver to pick out faint GPS signals from the air, except jammers do it by adding noise to the environment.”
Teams from the University of Illinois Champagne Urbana and Stanford University were invited to the first-ever DT NAVFEST at Edwards Air Force Base to test their projects in a GPS degraded environment. (Photo: U.S. Air Force/Wei Lee)
The GPS jammers and support came from the 746th Test Squadron at Holloman Air Force Base, New Mexico.
According to Wei Lee, test safety engineer with the 412th Test Wing, the universities were invited to participate in DT NAVFEST on a trial basis with the hope of expanding to other institutions in the future.
“Live GPS jamming data is extremely difficult for academic labs to obtain due to the complexity of working with the Federal Aviation Administration and regional first responders,” Lee said. “It is crucial that the Department of Defense support basic research and development that is ongoing in our nation’s top academic institutions. Many of the low technology readiness level projects will eventually migrate from academic labs to defense industry and military applications. Allowing the labs to participate on a non-interference basis is a win-win situation.”
To minimize the effect on the local community and air traffic, planning of the GPS jamming was initiated months in advance. According to Johnson, the GPS jammers had a vertical reach of upwards of 30,000 feet, so the first step was contacting the FAA, which provided a list of “green” times when commercial air traffic was at its lowest. This led to the testing being performed between 1 and 6 a.m. on test days.
Johnson said the team performed extensive modeling and simulation to identify how far the GPS interference would reach. “Not just at 30,000 feet, but ground level as well.”
The models suggested a small part of the Antelope Valley — a couple of small towns around Edwards — could be affected. “We wanted to err on the side of caution, so we constructed a huge list of emergency services from the Antelope Valley to contact.”
The team also set up phone lines the FAA and any emergency service could call up during testing and request the jammers to be turned off.
The 746th Test Squadron from Holloman Air Force Base, New Mexico, provided an array of GPS jamming equipment and support for DT NAVFEST at Edwards Air Force Base. The jammers provided a degraded GPS environment for testing multiple aerial platforms throughout the week. Testing was done from 1 to 6 a.m. each day to minimize impact on the community and civilian air traffic. (Photo: U.S. Air Force/Cole Johnson)
Cook said the event was extremely successful, judging by the feedback from the customers.
“For a first-of-its-kind event, it executed fairly smoothly, thanks to the test team and customers’ direct involvement,” he said. “The technical knowledge and support from the 746th TS was awesome. And the support given to this program from 412th Test Wing all the way down to the Airman on the ground providing direct support.”










 Surrounding sounds may not be a common way of determining location. But on the battlefield, warfighters need to know the direction of gunshots to enable a proper response.
Surrounding sounds may not be a common way of determining location. But on the battlefield, warfighters need to know the direction of gunshots to enable a proper response.





