A roundup of recent products in the GNSS and inertial positioning industry from the October 2021 issue of GPS World magazine.
MOBILE
Smartwatch
Provides dual-frequency and topo maps
Photo: Coros
The Vertix 2 GPS “adventure watch” is equipped with a dual-frequency GNSS chipset for high accuracy. It communicates with all global navigation satellite systems simultaneously, and has a battery life of 140 hours while using GPS — otherwise, the battery extends to 60 days. Global offline maps include landscape, topography and hybrid views. The watch includes an Insta360 action camera and has 32 GB of internal storage.
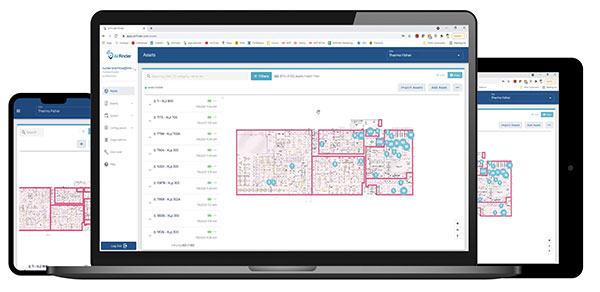
AirFinder helps companies locate, monitor and manage business assets indoors and outdoors. The quickly deployable, massively scalable platform does not require an IT infrastructure or extra components or hardware. Rather than using an internal Wi-Fi system, AirFinder operates on Link Labs’ patented and secure Symphony Link network. Location data from each AirFinder device securely flows to the AirFinder web app or directly to customer databases via extensible APIs, which enable users to monitor assets in real time, analyze asset history, add rules and alerts, establish geofences and more.
The EdgeSync network timing platform provides NTP and PTP grandmaster and boundary clock functionality for real-time edge applications. High performance, scalability, ease of use and manageability make EdgeSync suitable for data centers, finance, mobile edge computing, enterprise, smart grid, industrial IoT, process control and telecommunications. EdgeSync uses a multi-GNSS receiver (GPS, Galileo, GLONASS, BeiDou and QZSS), PTP and Synchronous Ethernet (SyncE) as input references and generates PTP, SyncE, NTP and timing signals (10 MHz, 1 PPS and time-of-day message) as outputs. It features dual 1-GbE ports for both copper RJ45 and optical network timing connections. EdgeSync also can provide IEEE 1588-2008 (PTP) grandmaster and boundary clock functionality.
CompassOne provides real-time military-grade location, orientation and direction sensing for deployed static and on-the-go assets. It receives all GNSS, ensuring uninterrupted operation. The device can be used both in counter UAV operations and general situations requiring satellite navigation. With a strong focus on durability and ruggedness, CompassOne is suitable for installation and operation in harsh environments. Military-grade connectors and high-end stainless-steel hardware ensure uninterrupted connection and protection from the elements, while the aluminum underside provides exceptional impact resistance and rigidity while keeping overall weight low. CompassOne can operate alone or be integrated with DroneShield’s DroneSentry system.
The Snapdragon 888+ 5G mobile platform is expected to power commercial smartphones from ASUS, Honor, Motorola, vivo and Xiaomi in the second half of this year. Satellite systems supported include all four constellations (GPS, BeiDou, Galileo, GLONASS) with dual-frequency GNSS. Additional systems supported include NavIC, QZSS and SBAS. Snapdragon 888+ provides AI-enhanced gameplay, streaming, photography and premium connectivity. Compared to its predecessor (the 888), Snapdragon 888+ provides an increased Qualcomm Kryo 680 CPU Prime core clock speed at up to 3.0 GHz and the sixth-generation Qualcomm AI engine with up to 32 TOPS AI performance, an improvement of more than 20%.
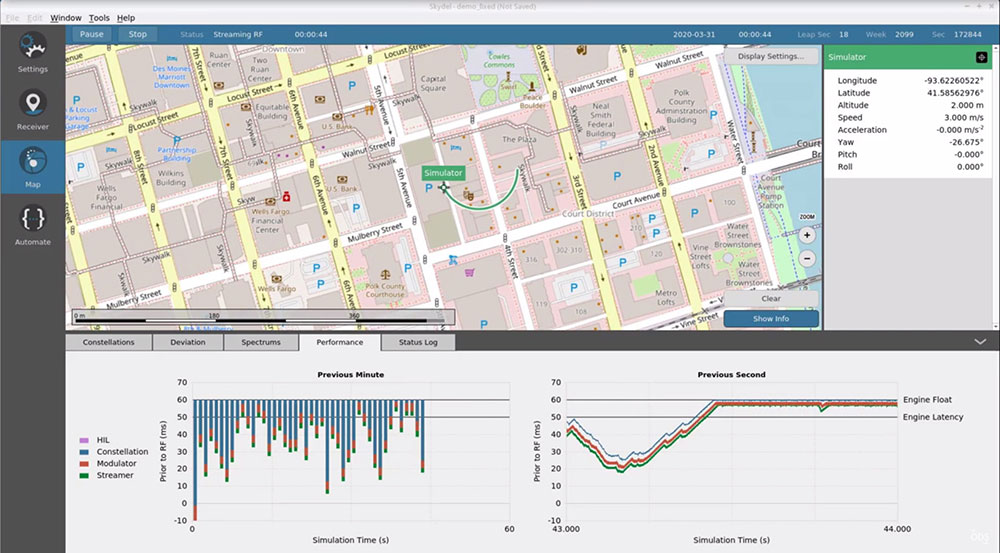
The Skydel Real-Time Performance graphs illustrate the software-defined engine’s low latency during a GNSS simulation. (Screenshot: Orolia)
A new real-time performance capability, now standard on all Skydel-powered GNSS simulators, achieves an ultra-low latency of 5 milliseconds. Skydel’s software-defined architecture is designed to meet the demanding GNSS simulation testing requirements in the automotive, military, space and other high-tech industries. Skydel also supports hardware-in-the-loop simulations without sacrificing ultra-low latency and high-end performance. A dashboard shows real-time performance graphs and enables users to grade the simulator’s performance, interpret data, diagnose inefficiencies, and optimize scenarios on the fly. As the system reaches its limits, it remains stable and fully operational, preserving the integrity of the simulation.
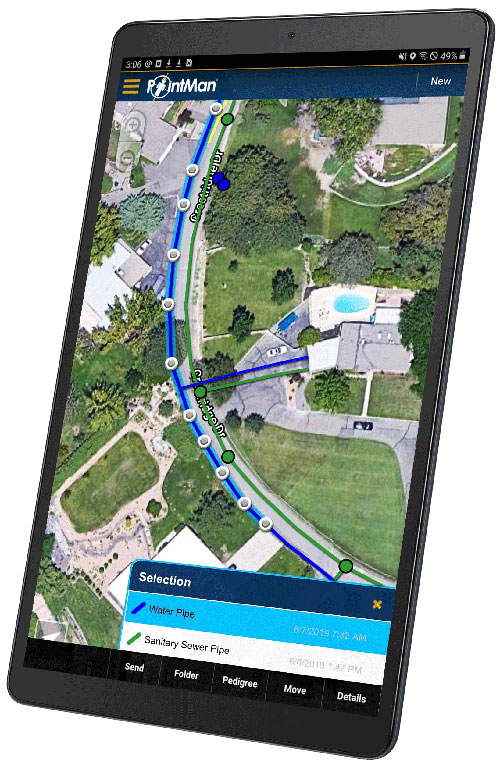
PointMan software is now integrated into the Vivax Metrotech vLoc3 with a GNSS real-time kinematic (RTK) receiver to create a utility-locate device. Using the RTK-Pro internal cellular module with 4G LTE capabilities, the operator can connect to the NTRIP RTK caster that provides RTCM 3 corrections. With the integration of PointMan with the vLoc3 RTK-Pro, critical buried infrastructure can be captured, recorded and displayed at survey-grade accuracy without additional external equipment or post-processing. The integration provides centimeter accuracy of the precise location of buried utilities in real time. Data collected includes the type of utility, the depth of cover and the utility’s precise location.
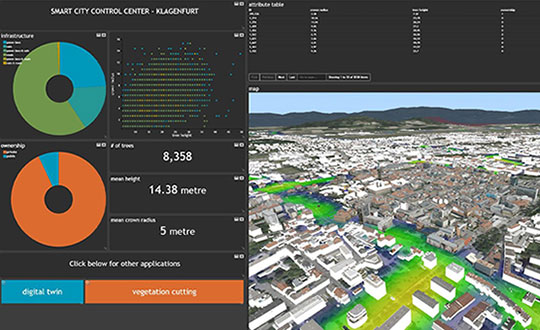
Geospatial and location intelligence for smart cities
Screenshot: Hexagon Geospatial
M.App Enterprise 2021 is a significant update to the platform for creating geospatial and location intelligence applications. The latest release features new browser-based 3D capabilities and enhanced visual effects, plus the ability to create and configure custom applications more easily. It allows users to access LuciadRIA’s 3D features with support for panoramic imagery, shading, ambient occlusion and other visualization effects to build browser-based solutions. It also features a new browser app configurator that makes it easier to create spatio-temporal dashboards, or Smart M.Apps. Feature Analyzer now allows users to add and manage multiple datasets on the fly and set up workflows.
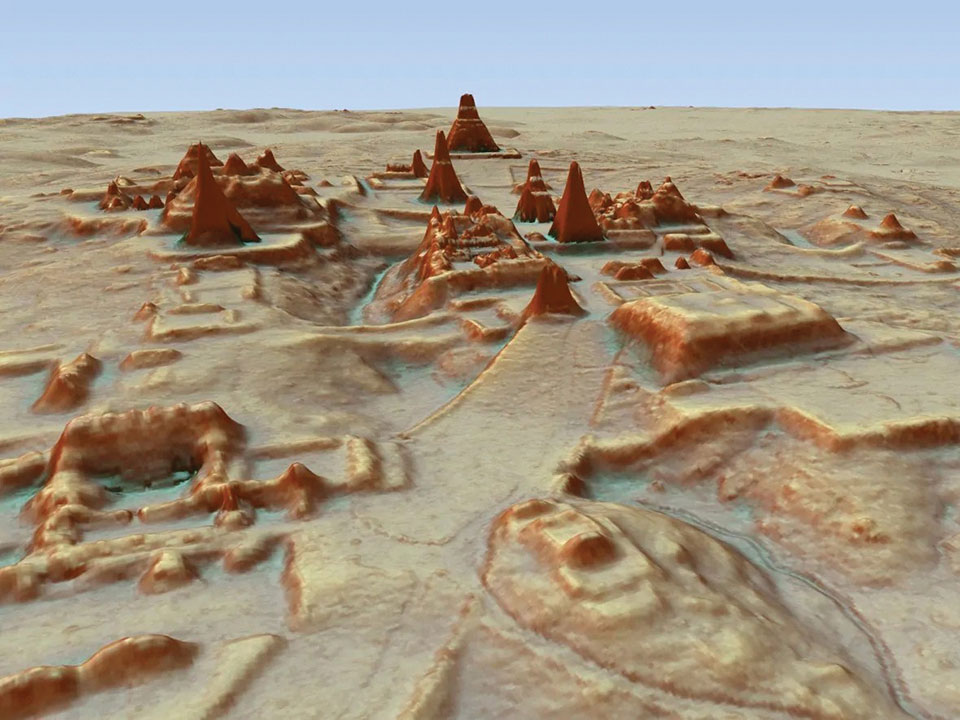
GPS and airborne light detection and ranging (lidar) have revolutionized archaeology. In just a little more than a decade, dozens of previously hidden cities and settlements have been discovered under heavy tree canopy and in other terrain. Many of the sites are in difficult-to-access areas, such as high atop mountains, in vast deserts, or enclosed in thick, nearly impenetrable foliage. Many were only the stuff of legend.
Others are right under our feet. In 2018, early settlements were uncovered in New England, including now-abandoned walls, roads and building foundations.
With the development of lidar, archaeologists gained perhaps their most powerful tool since carbon dating. Lidar began as a million-dollar classified technology. Now lidar units are small enough to attach to unmanned aerial vehicles (UAVs).
Lidar devices send more than 100,000 laser pulses to the ground every second and use their return times to calculate precise elevation data that allow researchers to build three-dimensional maps of a landscape, while GPS receivers provide its coordinates. Lidar fly-overs have revealed ancient cities, temples, causeways, irrigation systems and other structures, which are then ground-truthed by excavation teams.
“Lidar has completely changed the way we survey ancient Maya cities and what we can know about them, and it is a thousand times better than [what we used] before,” Francisco Estrada-Belli told GPS World. Estrada-Belli is a research professor at Tulane University’s Middle American Research Institute.
The application of lidar to archaeology began in 2009, when NASA sponsored a remote-sensing project that showed lidar’s usefulness below the forest canopy. The project revealed the surprisingly vast scope of Caracol, the largest Mayan archaeological site in Belize. Urban Caracol maintained a population of more than 100,000 people with an immense agricultural field system and elaborate city planning.
Since then, lidar has been used the world over to uncover buried secrets from early Roman fortifications in Italy to landscape changes from World War I. Just this August, lidar unearthed sobering evidence of a massacre by Nazi Germany in Poland during World War II.
Image: F. Estada-Belli/Pacunam Lidar InitiativePhoto:
A landmark project in Guatemala illustrates the benefits of lidar. The ancient city of Tikal was one of the best-mapped regions of the Mayan world, but the Pacunam Lidar Initiative quintupled the amount of mapping done in 50 years in a single summer, with 61,000 structures found in an 810-square-mile area invisible to the naked eye because of overgrown vegetation. What experts had mistaken for unusable swampland, for instance, had actually been farmland, crisscrossed with canals. The area may have been home to a population of up to 10 million people. Results were published in Science in 2018.
Seven Solutions sets new record for long-distance White Rabbit high-accuracy time-over-fiber link
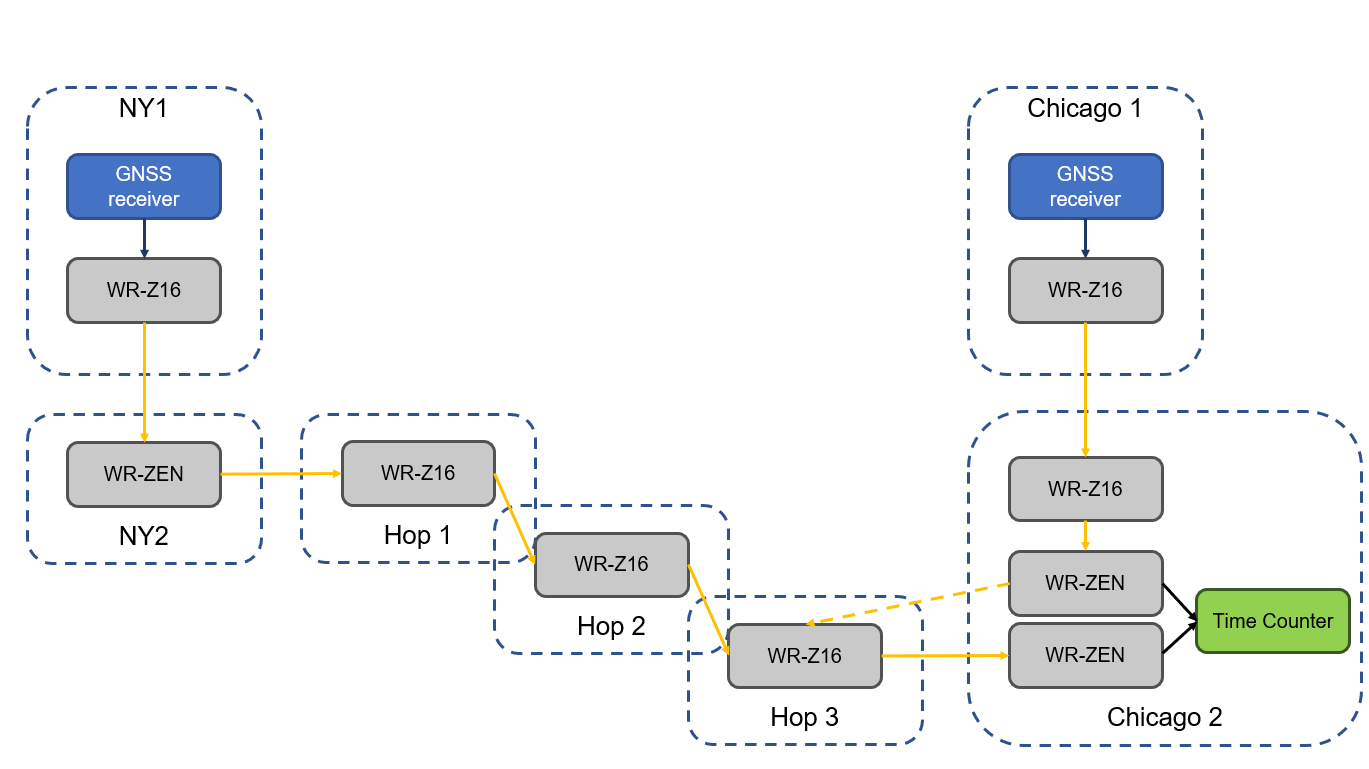
The White Rabbit link has an approximate distance of 1,350 km (840 miles) and was deployed in collaboration with Optiver U.S., a financial company, to connect Chicago and New Jersey trading locations. This link is formed by six long-distance White Rabbit hops using WR-Z16 and WR-ZEN TP devices connected by a combination of DWDM and SyncE-compliant transponders over a public telecommunication fiber network.
Seven Solutions is the leading company in the development and integration of high accuracy sub-nanosecond time transfer and frequency distribution for reliable industrial and scientific applications. Their technology integrates the White Rabbit protocol, the basis for the new high accuracy profile in the IEEE 1588-2019 (PTPv2.1).
This technology has become a reference for different sectors thanks to its unprecedented level of accuracy that outperforms current GNSS-based timing solutions, offering a suitable backup solution to deploy time dissemination networks. In the last few years, the White Rabbit technology has been adopted in the finance sector to deploy plug-and-play local area synchronization and metro-area links connecting different datacenters in financial hubs.
Although the performance of White Rabbit long distance links has been previously validated, this deployment sets a new distance record while integrating new resiliency and interoperability features using the latest WR-Z16 and the WR-ZEN TP devices.
Image: Seven Solutions
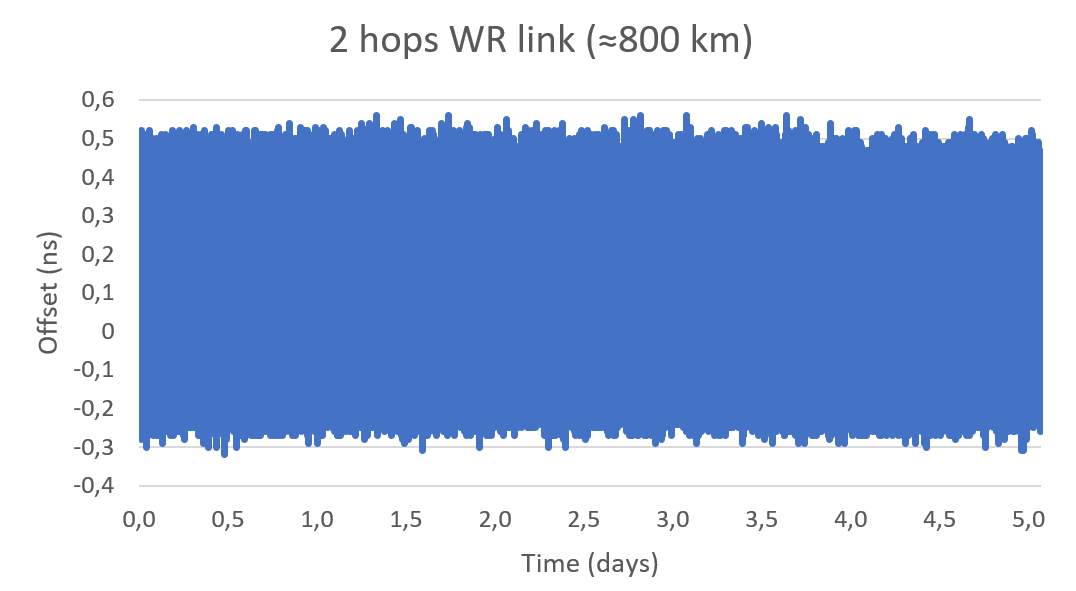
In a series of experiments, the link accuracy and precision were firstly validated setting a three long-distance hops loopback covering an approximate distance of 800 km (500 miles). In this case, the link was measured using an Agilent 53210A time interval counter for a five-day period. This experiment was intended to validate the feasibility of deploying White Rabbit links using commercial SyncE-compliant transponders and commercial telecommunication networks based on DWDM technologies.
Image: Seven Solutions
This measurement confirms the sub-nanosecond precision on a loopback and made it possible to perform network effect calibration to minimize the residual offset caused by the link asymmetry. In this case, a mean offset of 112 ps, a standard deviation equal to 139 ps and a peak-to-peak difference of 880 ps were obtained. Additionally, the offsets followed a gaussian distribution with no daily trends impacted by temperature or humidity.
This result proves the ability of high-accuracy time-over-fiber dissemination to fulfill the most demanding telecom requirements (class D Telecom Boundary Clocks) and corroborates one of the conclusions from the Analyzing a More Resilient National Positioning, Navigation, and Timing Capability report released by the RAND Corporation earlier this year:
“White Rabbit can support time transfer with accuracy that substantially exceeds the needs of almost all users; it is better than GPS. Therefore, this method is a strong candidate for backing up GPS time transfer for users that require atomic clock accuracy and for serving as a ‘national backbone’ for time so that secondary users, such as cellular networks, can perform to the limits of its own subdomain without suffering additional inaccuracies of its own master clock. Less accurate methods, like ordinary PTP, could provide timing to the vast number of other users, like mobile and cellular users.”
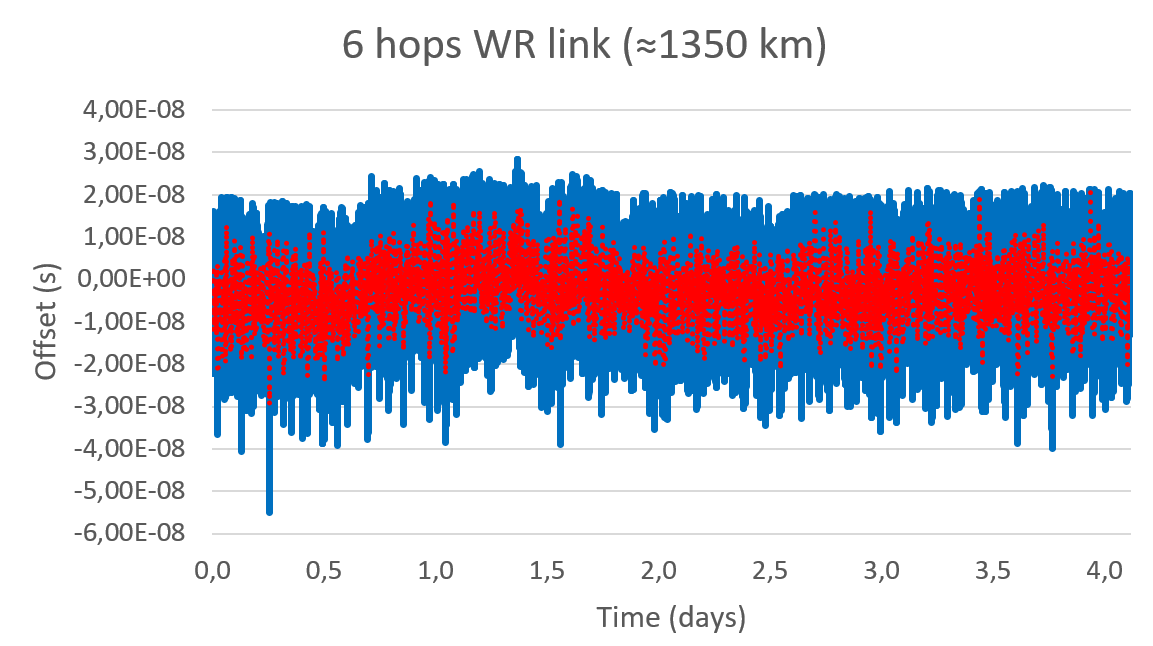
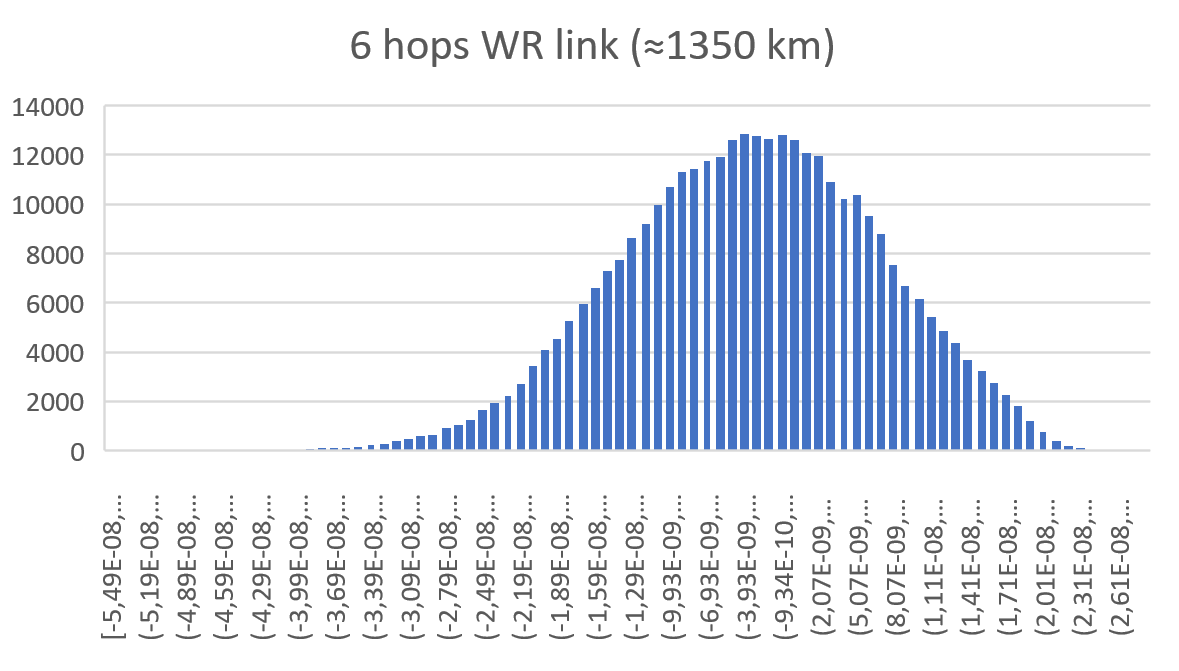
In a second test, the whole link was deployed using GNSS receivers in both ends of the link. The first GNSS receiver was used as the time reference in one end of the link (located in New Jersey) and the second GNSS receiver was used in the second end of the link to compare to the time reference (located in Chicago). Both GNSS receivers are the same model and have a 15 ns RMS jitter specification. In the second location, the local GNSS reference was compared to the remote time reference originating from New Jersey through the long-distance White Rabbit link.
Image: Seven Solutions
This resulted in a mean offset equal to 2.98 ns, a standard deviation equal to 10.4 ns and a peak-to-peak equal to 83.3 ns. It is noteworthy that due to the time interval counter, some of the samples were filtered. This effect is shown on the histogram but is considered negligible to validate the feasibility of the link.
Image: Seven Solutions
Additionally, the White Rabbit protocol automatically corrects daily effects due to temperature or humidity changes in the link, which are not observed in the measurement even when the GNSS receivers are located more than 1,000 km away from each other. This does not represent the real White Rabbit link error but indicates the limitation of using GNSS receiver to accurately measure the link accuracy.
As can be estimated from the measurements, the previous test and the GNSS specifications, the White Rabbit link maintains an approximately ±1 ns precision. In fact, the results show that the GNSS receivers are outperforming their specifications by almost 50%. The final accuracy is influenced by the GNSS receiver calibration. This link can be calibrated using network effect techniques (as shown in the previous experiment) or using the GNSS receivers themselves.
This experiment complements the results obtained in the U.S. Department of Transportation GPS backup demonstration showing the White Rabbit technology (which was catalogued as the most accurate alternative technology for time distribution) in a real telecommunications network scenario with very long distances. Additionally, it justifies the industrial need to deploy high accuracy time distribution when providing an alternative to GNSS-based timing, as it provides a next generation technology that can benefit other PNT systems and several critical infrastructures that rely on time synchronization for daily operations.
Beyond this, White Rabbit is demonstrated as a disruptive technology that can be used to measure the performance of GNSS in various locations to develop a warning and backup system, to connect high stability time references (for example, atomic clocks) for a suitable long-term ground-based backup to GNSS systems or to connect national metrology institutes around the world to compare different time scales.
This long-distance link represents a new milestone in ultra-accurate time transfer over existing telecom networks that allows cross-validating different linked references or accurately synchronizing them for coordinated actions at tight relative timing.
Furthermore, the deployment through existing telecom network proves its feasibility at affordable cost and opens the door to new disruptive applications. Atomic clocks have evolved to represent very stable references, but it has been typically assumed that time degrades as it is transferred over long distances making accurate comparisons between different references a challenge. This new generation of long-distance links represent a step further into tightly synchronizing different devices over fiber at long distances making them resilient to the vulnerabilities of GNSS timing.
This level of accuracy is key for certain applications and sectors nowadays. Matt Nassr, Data Engineering Lead at Optiver, remarked “Partnering with Seven Solutions has allowed us to better optimize for the highly distributed nature of the financial markets. Being able to establish a nanosecond-level precision link across the Chicago-New Jersey path further improves our ability to provide liquidity across the major US exchanges.”
“This is not a first step on the deployment of long-distance time synchronization networks, this is just one step further,” said Francisco Girela, Americas tech responsible at Seven Solutions. “We have been working for years on improving our devices, easing the monitoring and management, enhancing the resiliency, integrating failover features, adding interoperability with IEEE 1588 (PTP), NTP or PPS and allowing the integration of High Accuracy timing in third party devices thanks to the HATI core. During this journey we have learnt how to integrate the technology to work at its best and we have proved its effectiveness in telecom, data centers, finance, defense, or power grids among others.”
When asked about next steps, Francisco added, “We want to demystify this technology. People think that its deployment is complex or overkill, but that is not true. We see White Rabbit as the core technology to build alternative PNT systems, setting a sub-nanosecond timing foundation that will push the development of a more diverse and more accurate technology ecosystem.
“We have worked to evolve White Rabbit devices to be a market commodity when deploying time synchronization in local areas but providing a level of accuracy that will fulfill the requirements for the current applications and for the next decade. For long distances, complex deployments, or projects we are always happy to assist our customers and partners to get the best from our devices. We are sub-nanosecond natives; we care for every single picosecond.”
Single-base RTK is an excellent choice for many uses but mixing different baseline lengths can yield inconsistent results
By Gavin Schrock, PLS
Gavin Schrock, PLS
The surveying lead for a construction firm started getting calls from his crews — suddenly they were not checking in to existing control with the accuracy required. This presented a conundrum and an immediate resolution was needed to stay on schedule. What had changed? A nearby permanent base, part of the regional real-time GNSS network (RTN), had suddenly gone dark, and when the crews switched to other bases, they got the inconsistent results. Time to call the RTN. (See a primer on RTN.)
I have been operating a regional cooperative RTN for 19 years, and I get these kinds of support calls regularly, but typically only from users of the single-base mountpoints. Most RTN provide, via NTRIP casters, both network RTK (NRTK) solutions — such as master-auxiliary, VRS and FKP — and single-base solutions for each base. The base they had been using was down while the roof of the city building on which it is mounted was undergoing some maintenance.
The construction firm, halfway through a multi-year transportation project, had used the base when they established project control, and for layout and as-built tasks. Using the base, which was slightly more than 4 km from the site, the crews were used to seeing check-in results of 0.3′ (9 mm) or better (horizontal). When they switched to different bases, 23 km and 25 km distant, the results were now inconsistent, and in many instances, double.
This was an easy fix. We met on site and checked results using the network solution; it closely matched the results they were seeing from the original base. Until the original base was restored, this would meet their needs.
It made a lot of sense to use the nearby base, as setting a temporary project base on the congested and sky-view challenged site was impractical. Furthermore, the baseline length of 4 km yields excellent results. Single-base RTK is a powerful tool, and a default for many construction projects, provided that:
the base has an unobstructed view of the sky
the base is free of nearby multi-path hazards
the base receiver and the antenna are of the same or better quality as the rovers
the base receiver and the antenna support the constellations and the signals desired.
In many ways, it is hard to beat single-base RTK. For instance, if you set up a base right on the site, say less than a kilometer away, this should yield the best results possible for RTK, and can be better than network RTK.
However, there are challenges. Single-base, typically “iono-free” solutions common in today’s rovers, degrades over the baseline length. The rule of thumb for many is that the degradation becomes noticeable when baseline lengths exceed 10 km. It is not uncommon for rovers to fix at much longer baseline lengths; 20 km, 30 km, 50 km or more — but results will likely vary from hour to hour or day to day. Changes in ionospheric and tropospheric conditions can bring inconsistencies, particularly over longer baseline lengths.
Network RTK may not beat single-base over very short baselines, but as it uses 5 to 15 bases (depending on the implementation) it can better model in the varied conditions. It can provide great consistency and repeatability, even if an individual base is unavailable, as was the case for this conduction site. There are strengths and weaknesses for both. NRTK brings consistency over a wide area, you do not have to set up (and guard) your own base, and the geodetic values are solved.
If you can have an on-site base, you can under certain conditions see a gain in results. This is especially important for certain applications, such as machine control and precision agriculture, for which tight year-to-year and row-to-row repeatability is key. However, if you may need to use another base at some point, you may be better off starting with NRTK, if it yields the results you seek.
Gavin Schrock is a practicing surveyor, technology writer, editor of xyHt Magazine and operator of a cooperative GNSS network.
First, there was one. In July 1995, the U.S. Air Force declared the Global Positioning System had met all the requirements for full operational capability (FOC). Soon thereafter, there were two. In December of that same year, Russia’s Globalnaya Navigazionnaya Sputnikovaya Sistema (Global Navigation Satellite System, or GLONASS), also achieved FOC. For a quarter century, that was it.
Then, last year, the number doubled, as both the European Union’s Galileo and China’s BeiDou Navigation Satellite System (BDS, named after the Big Dipper asterism, which is known in Chinese as Beidou) achieved FOC.
The Indian Regional Navigation Satellite System (IRNSS, aka Navigation Indian Constellation, or NavIC, which means “sailor” or “navigator” in Hindi) and Japan’s Quasi-Zenith Satellite System (QZSS, also known as Michibiki) are not global yet, but plan to become so. Currently, NavIC is an autonomous regional satellite navigation system, and NavIC-based trackers are compulsory on commercial vehicles in India. QZSS currently complements GPS to improve coverage in East Asia and Oceania, but Japan plans to have an operational constellation of seven satellites for autonomous capability by 2023. The Korea Positioning System (KPS) plans to join the party by 2035.
Who’s next? Will it be another country or a private company? Given that the state-sponsored systems are free to end users, I don’t see what the business model would be for a private GNSS constellation, unless it were to piggyback on one built mainly for another purpose.
Surveyors who have begun to routinely use three or more constellations are over the moon. One, quoted in this month’s cover story, recalls that “the use of GPS for construction staking was an extremely risky proposition” because its residuals exceeded most construction tolerances. Using multiple GNSS constellations, however, has increased confidence in the accuracy of results to the point that some construction companies are relying on GNSS receivers for staking. Additionally, multi-constellation receivers can now increasingly be used under tree canopies and against structures, whether natural or built.
Whatever their mix of military, political and commercial motivations for building, deploying and operating their own GNSS constellations in addition to the original two, the European Union, China, India, Japan, Korea and whichever entity may follow are greatly improving satellite-based positioning, navigation and timing (PNT) for all users everywhere — by increasing accuracy, shortening the time to first fix, and making GNSS more impervious to jamming and spoofing.
In 1978, the year that the U.S. Department of Defense launched the first NAVSTAR GPS satellite (“NAVSTAR” was later dropped from the system’s name), Neil Young sang “Four Strong Winds” (originally written by Ian Tyson and performed by him with his wife Sylvia as the Canadian folk-duo Ian and Sylvia).
Now, GNSS has “four strong winds,” two lighter ones and several more breezes to follow. As a sailor and a navigator, I welcome them heartily. As this magazine’s editor-in-chief, I don’t mind that, like Jeep, Kleenex, Popsicle and Xerox, GPS probably will stick in popular culture as a generic term for global satellite navigation systems way past its accurate description of what is in the box.
All four current GNSS and two regional systems have been built and are operated by public agencies. Many correction services and complementary PNT services are operated by private companies.
Going forward, what do you expect the division of labor to be between the public and private sectors in building and maintaining PNT capabilities? What should it be?
Ellen Hall
“The space race was championed by governments. Space travel, communications and other technologies were born from government exploration into space. Today we see many private companies engaged in space. Several are intent on supplementing GNSS navigation, and some envision competing. Private companies have a way to go if they plan to compete with systems like GPS, but competition is often at the center of innovation and may benefit everyone.” — Ellen Hall Spirent Federal Systems
Jules McNeff
“GNSS and regional systems are established and sustained to meet the needs of the governments and public agencies that operate them. They cover wide areas and provide services to extremely diverse user communities at levels of performance based on resources that are justified by user requirements and limited by technical affordability. When the global/regional service levels don’t meet the needs of a particular user group or require backup for security, the opportunity is opened for other agencies or private companies to create augmentations and complements to meet the additional needs. The mix is variable and will be determined by the user groups and the market.” — Jules McNeff Overlook Systems Technologies
F. Michael Swiek
“There is really no single ‘correct’ answer or specific division of labor between public- and private-sector entities in GNSS. The situation we see today is the result of decades of constructive and successful ad hoc evolution of roles among and between public- and private-sector entities. Public agencies are better suited to provide foundation technologies and infrastructure due to the large costs and long timelines associated with establishing the constellations and maintaining stable and consistent service. The private sector is better positioned to provide variety and timely flexibility in developing innovative solutions to the broad range of constantly emerging user requirements across all market segments. This unofficial and continually evolving division of labor has worked successfully and continues to adapt to the evolving world of PNT.” —Michael Swiek GPS Alliance
Simulator vendors explain their evolution in response to changes in GNSS/PNT, comment on technical challenges they face, and outline principal markets.
GNSS receivers — which were never as simple as FM radio receivers or garage door remote controls — are becoming increasingly complex. The causes for this include continuing efforts to:
reduce their size, weight, and power (SWAP)
utilize new signals from up to four GNSS constellations
integrate them with other sensors, such as inertial measurement units (IMUs), cameras, and lidars
take advantage of a growing number of public and private, global, regional, and local correction services
meet the requirements of booming new markets, such as autonomous vehicles
mitigate the threats posed by the proliferation of unintentional and intentional RF interference, the latter better known as jamming, and by spoofing.
In short, receiver manufacturers must constantly adapt to a GNSS/PNT landscape that is, as one of the respondents to this Q&A put it, “ever evolving.”
In turn, the growing complexity of GNSS receivers requires increasingly sophisticated simulators to test receivers and their integrations in controlled conditions before field testing and deployment. Increasingly, this is achieved by replacing with software what was once done in hardware. Simulation remains a vital, though often underappreciated, segment of our industry.
On the following pages, five simulator vendors briefly explain their evolution in response to changes in GNSS/PNT, comment on the principal technical challenges they face, and outline their principal markets.
Spirent Federal Systems’ GSS6450 RF record and playback GNSS simulator is portable, for testing automotive applications in the field. (Photo: Spirent Federal)Lisa Perdue Product Line Director, Simulation Orolia
OROLIA
How has your approach to simulation changed over the years and in response to what changes in GNSS/PNT?
We have transitioned away from the GNSS simulator approach of using fixed, allocated hardware that we used in our early simulators to the more modern software-defined approach we use today. Given the ever-evolving PNT landscape, it is difficult to design hardware that will support all future GNSS and PNT simulation needs. Instead, we focus on the development of the Skydel software platform, which can then be used with the supported COTS hardware or turnkey system to generate the necessary signals. This gives us the benefit of maximum scalability and flexibility while being truly future proof.
The software-defined approach also allows us to offer Skydel in new and exciting ways. We aim to make PNT simulation accessible to everyone and we can do that through subscription and cloud-based simulation services.
What are currently the greatest technical challenges to GNSS/PNT simulation?
Today GNSS is only a part of the PNT picture. GNSS receivers are often tightly integrated with other sensors and many times the GNSS receiver cannot be isolated to test it on its own. Other sensors must also be stimulated or simulated and included as part of testing. Correction services are becoming more common, but many are proprietary with no public specification. With no common standards available, it can be technically challenging to create a one-size-fits-all test solution.
We tackle these challenges through our plug-in feature. The plug-in architecture allows you to expand the capabilities of Skydel by adding your own features or complex integration with other systems. It allows you to exchange information with the Skydel Engine and even integrates it into the Skydel UI. With our open-source SDK, which includes example plug-ins, you can create your data outputs synchronized to the GNSS simulation, such as IMU or correction services data.
In what markets and applications are your simulators used? Are they used only in labs or also in the field?
At Orolia, we say ‘Skydel Everywhere.’ Skydel is used in applications ranging from military encrypted receiver testing (SAASM, M-Code, PRS) to commercial applications supporting any of the GNSS signals available.
Skydel is used in systems that are found in labs, but you can also find Skydel at an individual engineer’s desk, or even home offices. In the field, Skydel has provided simulation and threat generation capability to authorized test ranges and field test events.
The broadsim software-defined GNSS is powered by Orolia’s Skydel GNSS simulator engine. (Photo: Orolia)
RACELOGIC
Julian Thomas Managing Director Racelogic
How has your approach to simulation changed over the years and in response to what changes in GNSS/PNT?
Over the years, GNSS technology has changed significantly but our approach of identifying a need and creating a solution hasn’t changed since we launched our first LabSat GNSS simulator. We created LabSat because we needed a cost-effective, accurate and easy to use record and replay simulator that we could use for product development and production line testing for our VBOX Automotive and VBOX Motorsport technologies. This need could not be met by any other simulator manufacturer, so we developed our own solution, which in turn became LabSat. Although our approach has not changed, the needs of users, including our own engineers, have, so we continue to develop and improve LabSat to meet these needs.
With the increasing number of satellite launches in market segments such as communication and navigation, the number of requests for testing space-qualified receivers has increased dramatically. To test these kinds of scenarios, we have been making some major upgrades to simulate rocket launches and Earth orbit trajectories that require very different characteristics from land-based simulation.
As the number of constellations and signals has expanded very rapidly, the number of simultaneous signals that need to be simulated has put a far greater requirement on the computing power needed to render them. We have been working very hard on optimizing our routines to make the most of the new breed of high-performance multi-core processors. The result has been a big decrease in the time taken to create a scenario, and an increase in the number of signals that can be simulated in real-time.
What are currently the greatest technical challenges to GNSS/PNT simulation?
The biggest challenge is in simulating a large number of constellations and signals in real-time without using dedicated, expensive hardware to create them. The good news is that with the latest Intel Xeon processors boasting up to 40 cores and 80 threads, a much larger number of signals can now be created in real-time using off-the-shelf PC components.
In what markets and applications are your simulators used? Are they used only in labs or also in the field?
With the global pandemic causing national lockdowns, many engineers switched to working from home. Our largest growth in the simulator market has therefore been due to providing these engineers with a small, low cost, easy to use simulator that they can have on their desks at home, allowing them to continue to develop GNSS applications without having to go into the office. The markets these engineers work within are as varied as the markets that use GNSS technology.
We have also seen a big increase in the use of our simulators to test mass produced satellites used in providing global internet coverage. These satellites are being produced in large volumes, and the need for a low cost, reliable testing method on the production line has driven strong growth in this area.
Our simulators are often used in the field to gather data for in-lab testing, as small size and battery life are very important factors in this environment.
SPIRENT FEDERAL SYSTEMS
Phillip Bonilla Senior Systems Engineer
How has your approach to simulation changed over the years and in response to what changes in GNSS/PNT?
Spirent has provided highly accurate simulation solutions since the early phases of GPS availability, starting with defined hardware for each signal type. As the GNSS landscape has grown, Spirent has worked closely with leading developers, adding key flexibility and functionality to adapt and provide a growing product portfolio. By adopting a robustly defined system architecture, and employing signal-agnostic hardware, Spirent simulators can generate any of the available constellations and frequencies, with no more than a few clicks of a mouse.
While broadening the support for the increasing number of constellations has been a focus, so too has the necessity to provide users with high numbers of available channels and auxiliary simulation needs. To complement GNSS simulation, significant effort is being devoted to resilient application testing, providing users with flexible solutions for introducing jamming and spoofing to the test environment. Our agnostic hardware supports signal generation using software defined radio (SDR), including interference sources and user-defined IQ signal data. As customer demands have grown, alternative RF and PNT sensors have been—and continue to be—incorporated, allowing users an expanded and comprehensive test environment.
The new spirent simulator generates alternative RF navigation signals concurrently with GNSS signals. (Photo: Spirent Federal)
What are currently the greatest technical challenges to GNSS/PNT simulation?
Today, nearly all industries rely on GNSS or other PNT sources to some extent. With such varied and widespread use, laboratory testing is critical, and maintaining the highest levels of accuracy, reliability and robustness remains one of the greatest challenges. For modern hardware-in-the-loop configurations, simulation systems must be able to keep latency consistent to enable powerful post-processing of results. With this challenge in mind, we at Spirent design and manufacture our own hardware, ensuring precision and ultra-low latency.
Another significant test challenge posed by modern applications is the growth in vehicle speed and maneuverability. Creating a truly realistic test environment for supersonic and even hypersonic vehicles with high rates of spin and jerk places huge demands on a simulator. Spirent recently has introduced the industry’s first 2 kHz update rate, enabling the most accurate trajectories for the most mobile technologies.
Lastly, positioning engines are becoming more complex. In addition to GNSS and inertial, vision systems and a range of other sensors and signals-of-opportunity are providing developers greater opportunity for precision and robustness. Therefore, a core part of Spirent’s mission statement is delivering test equipment that is designed to be integrated into wider test benches and ensuring that equipment is always orders of magnitude more accurate than any device under test.
In what markets and applications are your simulators used? Are they used only in labs or also in the field?
Spirent simulators are used in all phases of the product life cycle across nearly all applications. Receiver manufacturers use our solutions beginning with initial research and development, throughout product development, and well into production and field testing. Along with the ability to use Spirent’s simulators for live range testing, Spirent’s GSS6450 record and playback system enables users to record the real world in high dynamic detail for repeatable lab testing.
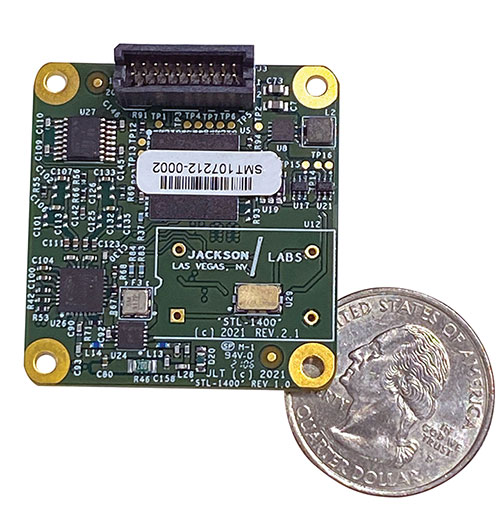
JACKSON LABS
Gregor Said Jackson President and CTO
How has your approach to simulation changed over the years and in response to what changes in GNSS/PNT?
Initially, we saw a large demand for GPS-only solutions. We are shipping units into this market and it is growing more than 30% year over year for us. Recently, customers are looking to also supporting other constellations. There is an emerging market for LEO simulation capability. Many LEO constellations are becoming reality, such as OneWeb, Kuiper, Starlink, Iridium, Xona, and others, and customers are more frequently asking if we can support these types of signals in our simulators. Demand also is arising for additional base-band signals to accommodate the RF signals, such as synchronized raw IMU data and other observables. Jamming and spoofing signals also are being requested and reproducing these as faithfully as possible is a big challenge for synthesized simulation. Lastly, we see demand rising for mil-type secure applications, such as M-Code, PRS (Galileo) and P(Y) code SAASM of course. The complexity of future simulators will rise in lockstep with the complexity of the RF spectrum coming to us from space.
What are currently the greatest technical challenges to GNSS/PNT simulation?
The STL-1400 positioning and timing receiver is designed for battery-operated low SWaP-C applications. (Photo: Jackson Labs)
A faithful reproduction of the real live-sky RF signals would rank high on this list. There are almost an unlimited number of out-of-band and in-band benign and adversary RF signals on a typical GNSS antenna these days, and more recently the sun has been acting up with solar flare activity that can disrupt GNSS signals. As GNSS receivers mature and become capable of tracking four, five or more carrier frequencies and constellations at once it becomes increasingly challenging to supply these types of signals from a simulator, and at a reasonable price-point. Sometimes, a wideband recording and playback system can do a better job at reproducing live-sky signals, however these systems are limited to playing back the same exact mission over and over again of course, and thus are not very flexible.
In what markets and applications are your simulators used? Are they used only in labs or also in the field?
Our simulators are built for two different applications: the first is a traditional type of GPS signal simulation where a Windows application allows a user to set up static or dynamic scenarios, allows them to upload NMEA playback files, create jamming or spoofing signals, and generally tweak the RF signal in many ways, such as modifying power levels and antenna patterns and even creating space vehicle failures in real time. Our customers range from car, aircraft, and avionics manufacturers, to R&D labs, to the government and academia.
Our simulators also are used for a hardware-in-the-loop application that we call transcoding. It allows glueless retrofitting of existing GPS equipment with any and all the emerging PNT solutions such as LEO positioning and timing, celestial navigation, INS/IMU, CSAC holdover, and concurrent/multi-frequency GNSS using a 1×1-in. transcoder module. Our transcoders fly on Air Force aircraft, are used to retrofit telecom equipment, and allow deep-indoors and underground GPS reception. Transcoders created an entirely new market for simulators.
SYNTONY GNSS
Sylvain Daubas GNSS Simulators R&D Teams
How has your approach to simulation changed over the years and in response to what changes in GNSS/PNT?
Manufacturers of GNSS receivers are targeting more precision and availability, especially in urban areas, which require acquiring more signals from more constellations and greater effort to minimize multipath errors. This confirms that an SDR design for signal generation is decisive to keep systems cost-efficient, as it directly benefits from Moore’s law. For instance, our new RTGS4-12 configuration is about four times more powerful (240 channels) than our previous standard configuration, for a similar budget level.
Regarding precision and RF quality, our simulators benefit from the same RF cards as Echo, our high-fidelity record and playback equipment, with a state-of-the-art RF front end: three channels at a 100 MHz sampling rate and a 16 bit IQ. The capacity to simulate protected signals is also crucial: with PRN Link, Constellator is ready for any present or future signal with encrypted spreading codes.
What are currently the greatest technical challenges to GNSS/PNT simulation?
Building a CRPA simulator is not an easy task, as this requires extreme levels of phase and time synchronization between several RF outputs, typically four, seven or more. This can be done in two ways: with a dedicated new RF board running with a single synthesizer for all channels or using the classical one, to which one should add a complex calibration mechanism. SYNTONY has made the tough choice, investing more at first in a mono-synthesizer version. However, this will benefit our customers, for which the usage will be simplified and it will save them a lot of time by shortening the calibration phase. This version already is available for sale.
On another note, it is a significant challenge to keep our product and its interfaces user friendly while also enabling our clients to configure each of the more than 500 parameters available (at the last count). We also keep in mind that new signals may appear, from LEO constellations for instance, answering to new needs such as autonomous driving. Constellator is HW ready for them, only requiring a software update.
In what markets and applications are your simulators used? Are they used only in labs or also in the field?
Constellator currently is mainly used in laboratories, in many market segments. Because it was initially built in partnership with spacecraft manufacturers, it benefits from the high standards of performance of space industries and includes several advanced space-dedicated features.
On top of the typical usage inside the labs, two other SYNTONY simulator products that are directly derived from Constellator are used in the field:
ECHO Recorder & Playback is used to record the GNSS environment with ultra-high fidelity: today @ 100Mhz, and before the end of 2021 even up to @ 200Mhz. ECHO has been used by our customers in cars, trains and often in aircraft test flights. Another usage of ECHO is to detect and record scintillation phenomena, as we will soon do in Brazil.
SubWAVE (GNSS coverage extension for underground places) allows indoor positioning with precision, directly compatible with standard GPS receivers, which can be crucial for safety or operational reasons. We have installed SubWAVE inside subways stations and tunnels (for example, in Stockholm, Paris and New York), in road tunnels (soon in France, in the “Tunnel du Mont Blanc”), in an underground bus terminal (also in Stockholm), in underground train stations (in Switzerland), and before the end of 2021 also in an underground mine (in Finland).
A roundup of recent products in the GNSS and inertial positioning industry from the September 2021 issue of GPS World magazine.
OEM
Network Expansion
Provides precision timing over fiber
Photo: Huber+Suhner
Direct GPS-over-Fiber is a copper-free GNSS remote antenna that eliminates the need for costly power infrastructure. It uses power-over-fiber technology to distribute both the timing signal and power for the remote device. It is designed for telecommunication and data-center customers in need of scalable timing infrastructure solutions for outdoor remote antenna applications. It is fast and easy to install, with flexible, space-saving configurations that eliminate the need for power infrastructure at the remote end. The product makes network expansion achievable with a compact design and integrated transmitters, eliminating the need for multiple GPS antennas and maximizing the available space. It also extends the signal range between the antenna and the receiver.
The cost-effective EdgeSync network timing platform provides NTP and PTP grandmaster and boundary clock functionality for real-time edge applications. High performance, scalability, ease of use and manageability make EdgeSync suitable for data centers, finance, mobile edge computing, enterprise, smart grid, industrial IoT, process control and telecommunications. EdgeSync uses a multi-GNSS receiver (GPS, Galileo, GLONASS, BeiDou and QZSS), PTP and Synchronous Ethernet as input references and generates PTP, SyncE, NTP and timing signals (10 MHz, 1 PPS and Time of Day message) as outputs. It also can provide IEEE 1588-2008 (PTP) grandmaster and boundary clock functionality and leverages unique PTP algorithms to deliver stringent timing for demanding, precise applications.
The P-1750 IMU and the P-1725 IMU complement the previously released P-1775 IMU to create a full line of IMUs with high-performance accelerometers and photonic integrated chip (PIC) technology. The P-series IMUs are offered in the same compact IMU housing design, and now offer more dynamic and accurate sensor performance, delivering improved navigation capability and more environmental robustness in vibration and shock capability for more challenging applications. PIC technology features an integrated planar optical chip that replaces individual fiber-optic components to simplify production and increase reliability. The accelerometers used in the P-series IMUs offer greater sensitivity and accuracy in their dynamic ranges. The IMUs are designed for challenging applications on land, sea and air, including autonomous trucks and people movers, drones, autonomous underwater vehicles and platform stabilization. Industries include transportation, military, agriculture, construction and mining.
The HC860 and HC860E active GNSS/Iridium antennas are designed for precise positioning, covering the GPS/QZSS-L1/L2, GLONASS-G1/G2, Galileo-E1 and BeiDou-B1 bands, including regional SBAS. The antennas also support active Iridium reception in the 1616.0-1626.5 MHz band. The HC860 housed and HC860E embedded helical antennas are designed for high-accuracy positioning. They are packaged in a light, compact form factor suitable for a variety of applications, including autonomous vehicle navigation (land, sea and air), handheld survey devices, automotive positioning, timing and other precise-positioning applications.
The Panasonic Toughbook G2 is a fully rugged 2-in-1 detachable tablet with optional keyboard that features an innovative modular design and user-removable expansion packs (xPAKs). With three modular expansion areas and up to 36 xPAK combinations, users can customize the Toughbook G2 to suit their needs with options including a 4G LTE-A multi-carrier with GPS or a dedicated U-blox NEO M8N receiver. The device is backward compatible with most Toughbook 20 and G1 docks. It has a 10.1-inch display, an Intel Core i5 and i7 vPro processor and runs on Windows 10 Pro. It has an 18.5-hour battery life. The 2-in-1 detachable design allows users to operate the device both in laptop and tablet modes.
The WASSP S3r multibeam sounder combines data from a multibeam sounder transducer with 224 beams covering a 120° swath port to starboard along with position, heading and motion to create an accurate survey situations and environmental conditions. WASSP S3r is able to survey areas up to 10 times faster than a single-beam sounder. The S3r uses an SBG Ellipse-D Inertial Navigation System for its RTK + INS. The Ellipse-D allows the sounder to create accurately positioned 3D bathymetric representations of the seafloor, down to centimeter accuracy with minimal passes. WASSP has also incorporated the Ellipse-D into its S3Pr portable survey package. The SBG Ellipse-D was able to fit into a covered housing that allows quick setup on small vessels and interface with the WASSP DRX processing unit and CDX software. Ellipse-D integrates a dual-antenna, multi-band GNSS receiver, and is capable of delivering precise heading as well as centimeter-level position accuracy in challenging GNSS conditions.
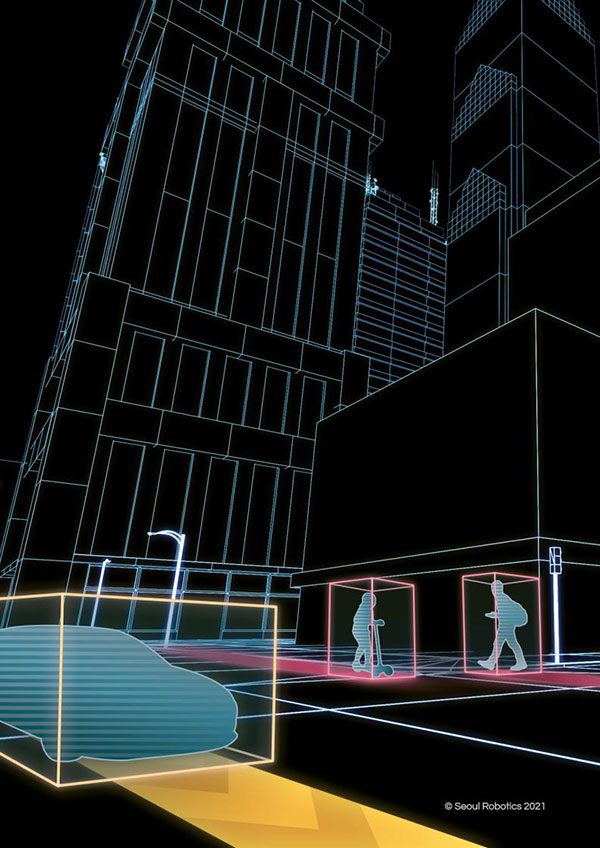
Voyage is a plug-and-play lidar perception system that delivers highly accurate object detection, tracking and classification capabilities. The deployment kit is equipped with SENSR2 software, lidar sensors and a lidar processing unit. Voyage provides volumetric profiling and motion-prediction capabilities, regardless of lighting conditions, and can collect and process data from up to four sensors for insights across the sensor coverage zones. Voyage does not capture, show or store any biometric and otherwise identifying data to maximize the protection of people’s privacy when installed as part of smart-city and security systems. The company’s sensor-agnostic perception software is available worldwide and is deployed by top-tier organizations such as BMW, Mercedes-Benz, the Chattanooga Department of Transportation and Emart, among others.
The TinySurveyor is a high-precision instrument for the surveying and infrastructure industries, able to execute large tasks up to 10 times faster than traditional methods. The machine pairs with a GNSS receiver to accomplish large-scale stake-outs, road pre-marking, as-built surveys and topographic surveys. Its ability to mark out existing data or collect new data at high speed and with high accuracy makes the TinySurveyor suitable for repetitive, time-consuming and labor-intensive tasks. With a GNSS receiver, repeatable results ensure accuracy of 1-2 cm. The TinySurveyor integrates with any GNSS receiver and has been tested with units from Topcon, Trimble and Leica.
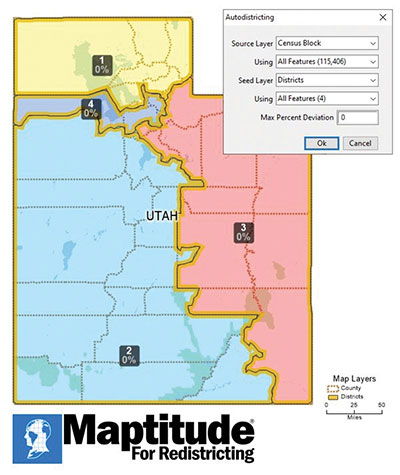
Maptitude for Redistricting 2021 is a specialized tool for political redistricting that enables state legislatures, political and public interest groups, local governments and private citizens to create and advocate redistricting plans that meet their goals, adhere to legal requirements, and stand up to public scrutiny and legal challenges. Unlike a general-purpose GIS, Maptitude for Redistricting streamlines the plan creation process for all types of political boundary definitions and provides all of the calculations and reports needed. It is suitable for congressional redistricting as well as state legislative districts, city councils and local school board districts.
With the Luciad 2021 platform, defense, aviation, maritime and other organizations can develop effective and reliable web applications. LuciadFusion, an all-in-one server solution for geospatial data management, has two new types of data streaming, resulting in faster streaming of imagery and point cloud data. LuciadRIA supports Web Assembly to bring desktop-like calculations to the browser. Luciad 2021 also features enhancements to software development kits for desktop and on-board vehicle applications. LuciadLightspeed seamlessly integrates into JavaFX-based applications, making it easier to embed its map components into user interfaces, and now provides for high-resolution map printing. LuciadCPillar, an API for C++ and C# developers, was updated with labeling support and other new features.
The Ping200XR integrates the capability of the Ping200X TSO Certified Mode S ADS-B OUT transponder with the high-integrity truFYX TSO-certified GPS position source into a single enclosure. The integration simplifies installation and allows the customer to choose between the installed GPS antenna or one provided with the Ping200XR. The integrated GPS ensures maximum safety by providing Source Integrity Level (SIL) 3 RTCA DO-229D and TSO-C145e Class Beta 1 performance, a requirement for Mode S and ADS-B airspace access, and for reception and processing by certified avionics and traffic collision avoidance systems in other aircraft as well as air traffic control. SIL 3 performance is not available from non-aviation certified GPS receivers, which often are used as an autopilot navigation source.
The RTL-450 lidar sensor incorporates a lightweight MEMS mirror and a precision navigation system to generate accurate data for demanding aerial surveying missions. The high-resolution, three-dimensional point clouds it creates enables operators to conduct advanced analytics of geographic and manmade features. Made in the United States, the RTL-450 incorporates patented lidar sensor technology. It weighs just over 4 pounds and is designed to operate independently of a drone platform, providing great flexibility for drone integration. Its modular design facilitates quick, efficient integration onto user-selected platforms.
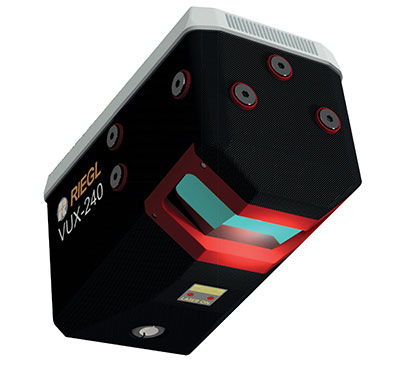
The RIEGL VUX-240 is a lightweight airborne laser scanner, especially designed for use on UAS/UAV/RPAS and small manned airplanes or helicopters. With its wide field of view of 75° and a data acquisition rate of up to 1.8 MHz, the instrument is suitable for high-point-density corridor mapping applications. The VUX-240 uses Riegl’s Waveform-Lidar technology, allowing echo digitization and online waveform processing. Multi-target resolution is the basis for penetrating even dense foliage. A continuously rotating polygon mirror wheel enables scan speeds of up to 400 lines per second, for efficiently covering large areas when operated from fast UAVs or aircrafts. The scanner stores 1 terabyte of data internally and is equipped with interfaces for an external IMU/GNSS system to control up to four external cameras.
The Carrier H6 Hybrid is a heavy-lift gas-electric hybrid drone powered by either the H2400 (Carrier H6 HE+) or H5000 (Carrier H6 HL) hybrid drone generator. The Carrier H6 Hybrid HE+ is equipped with the H2400 generator providing 2400W of continuous power. The recommended payload is 4 kg allowing for up to 2.5 hours of flight. The maximum payload of 6 kg allows up to 1.5 hours of flight. The Carrier H6 Hybrid HL has a maximum payload capacity of 15 kg and can be configured to carry more robust scientific-grade sensors, such as multispectral cameras, professional DSLRs for cinematography and lidar. The H6 Hybrid HL also can be used in heavy-lift applications involving asset transportation and delivery, agricultural spraying and search and rescue.
Harris Aerial, harrisaerial.com
Industrial drone system
Autonomous ops from a dock
Photo: PowerVision
The PowerVision True Unmanned Aerial System combines the PowerEgg X 8K drone, PowerEgg Dock and the PowerVision Cloud web-based software platform. The integration provides a turnkey solution for remote, autonomous data-collection missions. With the system, drones can be deployed at scale as data-acquisition infrastructure, instead of tools to be operated on individual missions. Powered by artificial intelligence, the system streamlines the drone’s takeoff, flight, dynamic mission and return to the charging dock autonomously. The system weighs 34.8 pounds (15.8 kg) in a 570 x 400 x 250-millimeter form factor, allowing it to be deployed by a single person without special tools or equipment. The solution can be used for powerline inspections, environmental compliance, asset inspection, facility security, GIS, surveying and mapping.
The StarCourse service provides real-time extended ephemeris data for GNSS chipsets in connected mobile devices, giving them a headstart in determining position accurately and quickly. For devices with limited connectivity, typical extended ephemeris solutions have provided a headstart with 7¬–14 days of ephemeris data. StarCourse provides a 50% reduction in RAM requirements, 90% reduction in CPU cycles, and high location accuracy. Full data customization is provided to StarCourse subscribers, allowing them to create optimal solutions for their needs. The service enables autonomous positioning on connected GNSS IoT devices including asset tracking, wearables, in-dash navigation and mobile devices. For situations where accuracy is paramount, StarCourse Premium provides ultra-precise predicted ephemeris for the first 24 hours.
Trailer management solution FleetLocate captures data at the trailer level and translates it into actionable business intelligence to increase trailer productivity while reducing waste and costs. Telematics devices deliver core trailer insights that help automate yard checks and maximize use. Advanced trailer technologies are available, such as solar power management, tethered/untethered configurations, IntelliScan cargo sensing, cargo image capture and retrieval, door sensors, liftgate battery monitoring and more.
Geospatial mapping company GeoSLAM has expanded its mining offerings.
The company also announced an automated processing platform, GeoSLAM Connect, which provides users with the flexibility to process data to their specifications through interactive, customizable script-based workflows.
The new innovations can be used alongside GeoSLAM solutions already available, including GeoSLAM Volumes for stockpile volumetric calculations.
GeoSLAM Production Progress Mapping allows operators to make short-term decisions on newly mined production areas when coupled with the ZEB scanner and its own internal coordinate system. Once the data from each scan has been automatically processed and georeferenced using GeoSLAM Connect, it can be uploaded to compatible third-party software. Operators can overlap collected data and precisely visualize changes over time to compare with project plans.
Convergence Analysis provides mine owners with a rapid and cost-effective way to understand the environment while keeping miners safe by measuring rock support at a safe distance.
A shaft inspection cradle is built for collecting data during inspections and analyzing change. It allows users to understand the erosion of a shaft wall, view blockages and identify hanging points for ore in hard-to-reach shafts.
Of the hundreds of papers researchers presented at 2020’s annual Institute of Navigation (ION) GNSS+ conference, which took place virtually Sept. 21–25, the following six focused on combating jamming and spoofing. The papers are available at www.ion.org/publications/browse.cfm.
Using Direction of Arrival
The author presents a scheme to combine multiple measurements for GNSS spoof detection for safety-of-life applications. The author’s algorithm combines both independent and correlated direction of arrival measurements that result in an analytic solution for the detection threshold, which can be computed online by the receiver. The scheme is validated for correlated azimuth measurements with data recorded by a dual-polarization antenna mounted on a C12 aircraft in flight, and applied to data from a live spoofing event. Results show an increase in detections of 47% using just two sequential measurements, with equal robustness for false alerts compared to snapshot-based detection. The results also show using sequential spoof detection is a powerful way to improve the detection capability of an anti-spoof defense, costing only added computational complexity while introducing a timely component to the detection.
Citation. Rothmaier, Fabian; “Optimal Sequential Spoof Detection Based on Direction of Arrival Measurements.” https://doi.org/10.33012/2020.17538
Using Neural Networks
Spoofing attacks are difficult to model and counteract. Data-driven schemes become useful if enough training data is available. This article explores such an approach using the cross-ambiguity function delay/Doppler map as input to a deep neural network for classification purposes. Several neural network models are trained, and their performance compared for detection and false-alarm probabilities. Results are promising, particularly with more complex neural networks, which are able to capture the nature of spoofing attacks. The method operates on a per-satellite basis.
Information cross-validation can be a powerful tool to detect manipulated, dubious GNSS timing data. Opportunistic time providers, Wi-Fi beacons and dedicated timing infrastructures provide largely available, precise sources of time information. A promising approach is to leverage time obtained over networks to which a mobile device can connect, and detect discrepancies between the GNSS-provided time and the network time. The paper investigates different options to secure augmentation time information, notably Network Time Security (NTS) and modified Wi-Fi beacons to support authentication. This scheme requires limited overhead, does not disrupt the normal operation of the Wi-Fi access points, and can be readily deployed.
Citation. Spanghero, Marco; Zhang, Kewei; Papadimitratos, Panagiotis; “Authenticated Time for Detecting GNSS Attacks.”
Using Cooperative Positioning
This paper highlights possible metrics to be checked to identify malicious attacks to the positioning and navigation systems in mass-market connected devices. The network-based exchange of GNSS data — such as GNSS raw measurements recently disclosed in Android smart devices — could offer the possibility to compare or combine such metrics to better identify spoofing and meaconing attacks.
This paper provides experimental tests and analysis toward devising an anti-spoofing strategy in connected GNSS devices. Included are a classical spoofing approach (simplistic RF attack) and its effects on the raw GNSS observables. With two synchronized devices in a cooperative framework, possible metrics are highlighted to identify a spoofing attack to one of the devices by observing anomalies.
Also included is work on simulated meaconing of an already-developed collaborative positioning framework based on the exchange of raw GNSS measurements through the network. The different approaches of an attack to the framework are laid down, and the anomalies to be considered to detect an attack in a network of cooperating devices are presented.
This paper represents a part of a larger goal to develop an anti-spoofing detection and coping mechanism in connected commercial GNSS devices.
Citation. Rustamov, Akmal; Gogoi, Neil; Minetto, Alex; Dovis, Fabio; “GNSS Anti-Spoofing Defense Based on Cooperative Positioning.”
Using OSNMA in the GIANO GNSS receiver
In recent years, the awareness about jamming and spoofing risks has been increasing, particularly in the timing community because they may cause the disruption of critical services and infrastructures in the telecommunication, energy and finance sectors, which rely on GNSS timing to operate. To overcome these hazards, the European GNSS Agency (GSA) has funded the development of timing receivers for professional applications, with the aim to address specifically the above vulnerabilities, improving the receiver’s robustness and the accuracy and reliability of time transfer.
In this context, the GIANO (Galileo-based timing receiver for critical infrastructures robustness) project consortium, coordinated by Thales Alenia Space Italy and with the support of Deimos Engenharia S.A. (Portugal), the Space Research Centre PAS in Poznan (Poland), Piktime System SP. Zoo (Poland) and Business Integration Partner S.p.A. (Italy), has been awarded a contract in the framework of the GSA’s “Fundamental Elements” program to develop a timing receiver for critical infrastructure applications. Besides the implementation of some interference and spoofing detection and mitigation techniques, the GIANO receiver makes use of Galileo’s authentication service OSNMA (Open Service Navigation Message Authentication), which can be employed as an added defense against some types of spoofing.
OSNMA exploits the TESLA (Time Efficient Stream Loss-tolerant Authentication) scheme, which is a protocol based on the transmission of message authentication codes generated with a key broadcast with some delay. The receiver authenticates the satellite messages through a digital signature algorithm and a public key known by the receivers, which also validates the root key of the TESLA chain, and through message authentication codes (MAC) used to authenticate specific fields of the navigation message. The receiver will also support public key renewals over the air.
This paper presents the OSNMA implementation within GIANO receiver, including the cryptographic operations required. The GIANO OSNMA capability will be extensively tested and validated with the support of the European Commission Joint Research Centre (Ispra, Italy).
Chimera is a signal authentication enhancement suitable for protecting the L1C GPS signal. As specified by the acronym itself (chips-message robust authentication), Chimera is based on the insertion of authentication features both at the message and spreading code levels. The data are digitally signed, while the spreading code is protected by the insertion of cryptographically generated punctures.
The Chimera interface specification document was made public in 2019, while its first transmission is expected to be broadcast from the Navigation Technology Satellite 3 (NTS-3) satellite, set for launch in 2023.
This paper describes the software implementation of the functions required to enable a GNSS software receiver to elaborate the Chimera authentication service. It includes a description of the development work and a detailed software profiling analysis, allowing for evaluation of the additional computational burden required by the Chimera verification and useful for providing important guidelines for receiver implementation.
Three decades after it first entered popular culture during the Gulf War, even a cursory review of articles about GPS aimed at a mass audience still will reveal a plethora of inaccuracies and misunderstandings, ranging from the trivial to the fundamental. Among my pet peeves, some for 20 years, are statements to the effect that GPS:
1. is a tracking technology
2. is the only such system
3. is responsible for routing errors
4. can operate indoors
5. receivers “talk” to the satellites
6. relies on triangulation
7. has 24 satellites in orbit
(For those of you picking up this magazine who are new to satellite navigation, the correct versions of those statements are below.)
Matteo Luccio
Additionally, GPS is taken for granted, with hardly any recognition for the engineers, technicians, U.S. Air Force service members and others who make the miracle happen, and for the fact that U.S. taxpayers foot the nearly $2 billion annual bill for the system, which is offered free to users worldwide. (All GPS program funding comes from general U.S. tax revenues. The bulk of the program is budgeted through the U.S. Department of Defense, which has primary responsibility for developing, acquiring, operating, sustaining and modernizing GPS. The U.S. Department of Transportation is responsible for funding the extra costs associated with new, civilian GPS upgrades beyond the second and third civil signals, and agencies with unique GPS requirements are responsible for funding them.)
While not as deadly as those about vaccines or as consequential as those about elections, misstatements about GPS lead to public confusion about threats to privacy and threats to the system. To help secure GPS, it behooves those of us who understand it the most to help educate the rest about it and correct misstatements, misunderstandings and misperceptions.
Tracking a person, vehicle or other object requires pairing a GPS receiver with a transmitter, typically a cellular phone.
It is one of four complete global navigation satellite systems (GNSS), the other three being the Russian GLONASS, the European Galileo and the Chinese BeiDou-3. There are also two regional systems, one Indian and one Japanese.
Routing errors are caused by bad map data or bad routing algorithms.
It requires a clear view of at least four satellites, unimpeded by terrain, buildings, roofs or even dense tree canopies.
GPS receivers are just that and have neither the need nor the ability to transmit messages back to the satellites.
Triangulation determines position by measuring angles. By contrast, GNSS determine position by measuring distances (between receivers and satellites), which is called trilateration.
The are currently 30 operational GPS satellites and the number varies as some satellites are temporarily removed from service, older ones are decommissioned, and new ones are placed in orbit. Find the current status of the constellation here.
Septentrio, a leader in high-precision GNSS positioning solutions, has launched the AsteRx SB3 receiver family, enclosed in an IP68 housing. The receiver offers superior availability of RTK high-accuracy positioning because of its ability to track a wide variety of signals from all currently operating GNSS (GPS, GLONASS, Galileo and BeiDou).
Even in dual-antenna mode, AsteRx SB3 uses triple-frequency tracking to maximize robustness and availability of its heading angles.
“The AsteRx SB3 brings state-of-the-art GNSS positioning and heading performance in a very compact and rugged enclosure that is fully certified and ready to use,” said Silviu Taujan, product manager at Septentrio. “Its simplicity and ease of use make it a truly plug-and-play device, allowing customers to have a fully operational system within minutes.”
The new line includes two types of receivers, both offering unique triple-band sub-degree GNSS heading.
AsteRx SB3 Pro is a high-performance rover receiver featuring the latest core GNSS+ algorithms for maximal reliability and availability in challenging environments, such as near high structures or under foliage.
AsteRx SB3 Pro+ adds value to the Pro version with base station functionality and internal logging. It also offers higher update rates and ultra-low latency, both important factors for fast-moving vehicles or mechanical components in automation or guidance systems.
AsteRx SB3 products are pin-to-pin compatible with Septentrio’s AsteRx SB ProDirect receiver and with the recently released AsteRx SBi3 GNSS/INS system, making it simple to change receivers.
The Septentrio AsteRx SB3 Pro is ruggedized for tough environments. (Image: Septentrio)