Three decades after it first entered popular culture during the Gulf War, even a cursory review of articles about GPS aimed at a mass audience still will reveal a plethora of inaccuracies and misunderstandings, ranging from the trivial to the fundamental. Among my pet peeves, some for 20 years, are statements to the effect that GPS:
1. is a tracking technology
2. is the only such system
3. is responsible for routing errors
4. can operate indoors
5. receivers “talk” to the satellites
6. relies on triangulation
7. has 24 satellites in orbit
(For those of you picking up this magazine who are new to satellite navigation, the correct versions of those statements are below.)
Matteo Luccio
Additionally, GPS is taken for granted, with hardly any recognition for the engineers, technicians, U.S. Air Force service members and others who make the miracle happen, and for the fact that U.S. taxpayers foot the nearly $2 billion annual bill for the system, which is offered free to users worldwide. (All GPS program funding comes from general U.S. tax revenues. The bulk of the program is budgeted through the U.S. Department of Defense, which has primary responsibility for developing, acquiring, operating, sustaining and modernizing GPS. The U.S. Department of Transportation is responsible for funding the extra costs associated with new, civilian GPS upgrades beyond the second and third civil signals, and agencies with unique GPS requirements are responsible for funding them.)
While not as deadly as those about vaccines or as consequential as those about elections, misstatements about GPS lead to public confusion about threats to privacy and threats to the system. To help secure GPS, it behooves those of us who understand it the most to help educate the rest about it and correct misstatements, misunderstandings and misperceptions.
Tracking a person, vehicle or other object requires pairing a GPS receiver with a transmitter, typically a cellular phone.
It is one of four complete global navigation satellite systems (GNSS), the other three being the Russian GLONASS, the European Galileo and the Chinese BeiDou-3. There are also two regional systems, one Indian and one Japanese.
Routing errors are caused by bad map data or bad routing algorithms.
It requires a clear view of at least four satellites, unimpeded by terrain, buildings, roofs or even dense tree canopies.
GPS receivers are just that and have neither the need nor the ability to transmit messages back to the satellites.
Triangulation determines position by measuring angles. By contrast, GNSS determine position by measuring distances (between receivers and satellites), which is called trilateration.
The are currently 30 operational GPS satellites and the number varies as some satellites are temporarily removed from service, older ones are decommissioned, and new ones are placed in orbit. Find the current status of the constellation here.
Hemisphere GNSS has announced its new Outback Guidance MaveriX Precision AG Solution.
The new MaveriX Precision AG solution, built around the new MaveriX agriculture application software platform, provides guidance, steering and application control.
The MaveriX application software includes a new user interface that provides a tablet-like user experience with 3D graphics. The included adjustable widgets give users the freedom to customize their UI experience.
Included with MaveriX, the new M7 and M10 terminals with 7- and 10-inch form factors are the centerpiece of the solution. The M-series terminals deliver the latest display technology and provide an enhanced situational awareness for users and preferred features like auto-scaling and pinch-to-zoom capabilities.
The MaveriX solution provides centimeter-level performance via the new eDriveM1 steering controller.
The eDriveM1 offers AB Straight, AB Contour, Freeform Contour, and Circle Pivot guidance modes and supports Shuttle Shift, Reverse Steer, and the Outback Guidance eTurns feature for automated headland turns. The eDriveM1 can be paired with the ESi2 Electric Wheel, existing OEM Steer Ready, or hydraulic retrofit interfaces. Outback Guidance continues to offer machine specific installation kits for more than 1,500 machine models.
The A631 GNSS Smart Antenna delivers unmatched GNSS performance at scalable accuracy levels using RTK, SBAS, and Hemisphere’s Atlas L-Band service. The A631 supports RTK Base functionality when paired with the Outback RTK radio option.
The MaveriX technology platform supports the AC110 Rate and Section control to maximize your implement functions during planting, spraying and application tasks.
Hemisphere GNSS designs and manufactures heading and positioning products, services, and technology for use in agriculture, construction & mining, marine, OEM, L-band correction service markets, and any application that requires high-precision heading and positioning.
How will widespread deployment of 5G most benefit GNSS?
Greg Turetsky
“The connectivity options that widespread 5G offer will accelerate multiple GNSS benefits. The high bandwidth is starting to encourage many into the RTK domain, but I think the bigger opportunity may come from the low power versions that enable IoT applications. The combination of the ubiquity of cellular connectivity with the low power of NB-IoT could truly accelerate the real time asset management sector all the way down to the package/pallet level.” — Greg Turetzky
Allison Brown
“Widespread deployment and adoption of 5G is likely to continue to increase the demand for spectrum as broadband access continues to expand. The recent FCC decision allowing Ligado to operate terrestrial networks in bands near GPS is likely not the last decision that will result from this increasing demand. It is not clear to me that 5G deployment will ‘benefit’ GNSS and chipset vendors may need to prioritize developing products that have improved robustness in the presence of nearby interference.” — Alison Brown
Miguel Amor
“The benefit of 5G will be seen in the long term, when 5G ranging capability is available. Hybrid positioning algorithms using both 5G and GNSS observations will provide significant positioning benefits in challenging urban environments and seamless navigation between indoor and outdoor environments. Applications across markets will see the benefits of hybrid 5G and GNSS navigation, but the real advantage lies in how this hybrid will enable the future of autonomous mobility. We will see both technologies working closer together to deliver a seamless and ubiquitous positioning solution.” — Miguel Amor
Mitch Narins
“Like communications, the ability to precisely and securely position and navigate is an essential part of 21st century life. Together they must support both critical and non-critical operations. This requires finding a common understanding of spectrum needs and how to have the best of both. In the long run, end runs by either side may achieve myopic goals but will damage society. The problem is crying out for an enterprise-level systems engineering leadership that can plot our future spectrum course. Else, the push for spectrum will continue, fueled by ‘entrepreneurial spirit’ and often a lack of understanding of the importance of other spectrum uses.” — Mitch Narins
UNMANNED SOLUTION, a South-Korean company based in Seoul, develops autonomous vehicles, including driverless shuttles, autonomous agricultural equipment, robots, and educational platforms. (Image: SBG Systems)
What is complementary / alternative positioning, navigation, and timing (PNT)? In this month’s cover story, five of our marketing partners share their perspective on this question and explain how their products address it.
The four global navigation satellite systems (GNSS), two regional navigation satellite systems and public and private augmentation services continue to provide exceptional levels of accuracy and reliability for positioning, navigation and timing (PNT). Yet their well-known vulnerabilities also continue to fuel the need for alternative/complementary sources of PNT data, especially for new and rapidly expanding user segments such as autonomous vehicles.
What constitutes a complementary service to GNSS for PNT and what constitutes a true alternative is partly a matter of definition and opinion. In a January report, the U.S. Department of Transportation stated
…suitable and mature technologies are available to owners and operators of critical infrastructure to access complementary PNT services as a backup to GPS. To achieve the parallel objective of resilience, as described in Executive Order (EO) 13905, that path should involve a plurality of diverse PNT technologies. Promoting critical infrastructure owner/operator use of those technologies that show strong performance, operational diversity, operational readiness, and cost-effectiveness is worthwhile. Based on this demonstration, those technologies are LF and UHF terrestrial and L-band satellite broadcasts for PNT functions with supporting fiber optic time services to transmitters/control segments. (Andrew Hansen et al., Complementary PNT and GPS Backup Technologies Demonstration Report, prepared for the Office of the Assistant Secretary for Research and Technology, Department of Transportation, January 2021, p. 195.)
A portion of the former USCG Loran Support Unit in Wildwood, New Jersey, with its iconic Loran antenna. (Image: UrsaNav, Inc)
For this year’s Q&A on complementary / alternative PNT, I asked five companies in the GNSS/PNT space to tell us how they define the issue, what solutions they prioritize, what markets they target, and which of their products specifically address the need to make PNT more resilient.
Roger Hart: The deep adoption of the state-sponsored, space-based global navigation satellite systems (GNSS) defines them as the primary PNT source at this time. Inertial navigation, long predating GNSS, does provide an independent navigation solution but does not provide time. In today’s conversation, alternative PNT generally refers to deriving position and timing from existing signals not purposed for navigation, to ground-based location systems, and also to emerging satellite systems that operate at higher power — or out of the GNSS band — to provide a diversity of PNT sources.
David Sohn: Simply put, alternative PNT is usually anything that is not GNSS. So, this includes PNT derived from low Earth orbit (LEO) satellites; vision, radar, lidar combined with inertial measurement units (IMUs) and map matching; positioning off cellular WiFi, digital TV signals and other signals of opportunity; legacy nav aids like VORTAC, ILS, DME and eLoran; and new dedicated infrastructure positioning systems like Locata, NextNav or RFID.
Matthieu Noko: Here at SBG Systems, for 15 years we have been developing navigation systems based on smart coupling of GNSS technology and inertial sensors. From our perspective, inertial sensors as well as sensors such as odometers or DVL, combined with high-end algorithms and RAIM, build consistent alternatives to GNSS-only systems in the vast majority of outdoor applications. Inertial sensors dramatically enhance GNSS-only navigation systems, making it possible to provide navigational data during GNSS outages in urban environments or to reject false GNSS measurements due to multipath effects.
As its entry into the driverless category of the Formula Student Germany car race, AMZ modified the car it has used in competition since 2015 to be driverless. (Image: SBG Systems)
The hybridization of several technologies makes it possible to reach a sufficient reliability level for the majority of commercial applications. However, in some indoor applications or in case of intentional jamming or spoofing, a higher resiliency is required. Using visual odometry can then complement quite effectively the navigation system, although this technology is still at a research level. Compared to infrastructure-based alternative PNTs — such as WiFi, Bluetooth or ultra wideband (UWB) ranging — visual odometry has the great advantage of not requiring any infrastructure.
Jacob Amacker: GNSS remains the dominant method of PNT in terms of market applicability and performance, but there are many rival technologies that have great potential and will compete with GNSS going into the future. The most important changes in PNT will be methods of position localization that are able to replace GNSS, and we will likely see these technologies integrated into huge systems, making use of ubiquitous technologies such as lidar. Whereas GNSS still provides the most accurate timing, as systems get more complex, time synchronization becomes a bigger issue, so different methods of this need to be explored.
There are many ways of improving the navigation data overall. Most commonly an IMU and a Kalman filter will be employed to stabilize any errors in the position localization method. A Kalman filter is a method of processing data from a range of sources—say, GNSS, an IMU, and a wheel speed sensor—and using them in such a way as to arrive at the position with a greater accuracy and precision than either source alone would be able to achieve. This process, however, requires precise timing for each data stream. Therefore, one area in which alternative PNT has to compete with GNSS is timing precision. GNSS makes use of atomic clocks used on satellites that are as accurate as you will get. There are also several ways of synchronizing time. A timing system can only be as precise as the most precise clock on the network, but there have been developments, such as Precision Time Protocol (PTP) that can synchronize timings across a network of clocks over Ethernet connections. Traditionally, PPS has been used and whereas this is still very precise it is not able to compete with PTP on convenience or sophistication.
Charles Schue: The common definition these days for “alternative PNT” seems to be with respect to, or as compared to, GPS or GNSS. Even the U.S. DOT’s website speaks to PNT as related to GPS.
I used alternative, complementary and backup somewhat interchangeably during my entire career with the U.S. Coast Guard. In recent years, I injected “co-primary” into the conversation as well. Prior to GNSS becoming ubiquitous, alternative, complementary and backup were not technology-based terms, but were instead operationally based. For example, “the prudent mariner” or “the prudent aviator” should use all means at their disposal to safely navigate their platform. For the navigator, this would include visual, audible and electronic signals or aids. The solution of choice obviously was the one that provided the highest accuracy, availability, integrity and continuity. However, prudence required always checking the solution of choice against other readily available alternatives, preferably that complemented each other, to ensure safety and continuity of operations. At one time, shipboard navigators might have at their disposal Loran-C, OMEGA, GPS, INS, radar, sextant, visual bearings (such as lights and landmarks), beacons, and soundings. Similar alternatives were available on aircraft.
Although always in the mix, timing was often in the background until around 2000. Then it started to become as important as positioning and, in many areas, even more important than positioning. Today’s incredible dependence on technology, and interdependence between technologies, means that knowing your “when” has become as important as knowing your “where”.
Whatever the terminology, the definition of alternative PNT should include some key features. Firstly, we should accept that the solution of choice today is GNSS, and we should define it as primary or co-primary. Next, we should acknowledge that when the primary solution is available and trustworthy, it should always be used, or at least considered. Finally, the primary solution should continually be compared with alternatives to ensure safe and secure provision of PNT to the user. Thus, an alternative PNT solution is one that is readily available; provides an easy and seamless transition to/from the primary or other alternatives; allows continuity of operation at a possibly degraded, yet usable, level of accuracy, availability, integrity or continuity; and is dissimilar enough from alternatives to withstand the effects that might be affecting the primary solution.
Do you agree with the U.S. DOT’s assessment, cited above, of what it will take to make the national PNT much more resilient and reliable? If you do, how do your offerings fit into that framework?
RH: While there are intricate differences in the signals generated by the primary PNT systems, they are all quite similar in terms of frequency and power and are all vulnerable to the same types of interference. Achieving the most resilient solutions will require the use of alternative RF bands and non-RF sources. Having a variety of alternative PNT sources will allow users to integrate the method most applicable to their platform constraints. Integration across the various PNT sources will need time synchronization to take full advantage of the alternate PNT systems. Our offerings work concurrently with GNSS, providing simulation and testing of GNSS and alternative PNT as true complements, while also offering the ability to measure timing accuracy in real time.
DS: Yes, we agree with the DOT’s assessment. However, to be clear, the DOT does not require “LF and UHF terrestrial and L-band satellite broadcasts for PNT functions with supporting fiber-optic time services to transmitters/control segments.” It stated that to achieve resilience, systems “…should involve a plurality of diverse PNT technologies…that show strong performance, operational diversity, operational readiness and cost-effectiveness.” Their demonstrations showed that those technologies they called out meet these criteria. Our solutions have been leading this resilient approach by offering several diverse, alternative PNT references.
We have fielded time-server equipment that operates from both GNSS and eLoran. Our standard offering time servers are equipped with multiple references from GNSS, network-based time services from NTP, PTP and PTP WR; internal references from disciplined atomic clocks; wireline references from IRIG, 1PPS or ASCII time code; and LEO PNT reference from the STL signal.
(Image: SimonSkafar_E+_Getty Images)
L-band or more generally the use of geostationary satellites was until very recently the only communication link for PNT augmentation services, although these signals are weak and easily disturbed or masked, especially at high latitudes. Resilient navigation will clearly need to allow multiple downlinks for corrections such as terrestrial networks (4G/5G) or satellite-based internet. In the mid-term, we expect the correction delivery over IP to become the standard, and L-band corrections to be used as a backup only. All our high-performance products already include an NTRIP client able to handle the IP corrections very easily.
JA: This is certainly one option. Largely, it is borne out of a need to compensate for the disadvantages of GNSS. This larger range of frequencies would provide a range of satellite-borne signals that have different penetration characteristics and information carrying properties but the same core purpose. Therefore, somebody making use of such a system will be better able to receive these signals even when under obstructions. Of course, some obstructions will still be impenetrable to GNSS signals and there is a long way to go to developing a comprehensive solution that can deal with timing differences when the signals travel through objects. It is likely that some other source of timing information, for example through the proposed fiber-optic services, will be necessary to smooth out these issues. Although we will see this much-needed upgrade to cover the shortfalls of GNSS employed, many other alternatives will start to take prominence. It is difficult to say which solution will win out, and it is likely that an upgraded GNSS will continue to dominate for the next decade or two at least. In terms of our offerings, we are exploring all possibilities and keep our core technology open to any position localization method. Of course, we will welcome any new technology that is a viable and improved method of PNT.
CS: I have long been an advocate of a system-of-systems approach simply because there is no PNT solution available yet that works everywhere, under all conditions, for all users, all the time. Many solutions provide only a component of PNT: an INS provides position (the “PN”), and an atomic clock provides time (the “T”). However, an INS does not know “where” it is without initialization and updates, and an atomic clock does not know “when” it is without initialization and updates. Fiber is awesome but is not wireless. Many alternatives depend upon GPS/GNSS as a necessary input. Others are augmentations that depend upon GPS/GNSS as inputs and not direct alternatives, such as space-based or land-based augmentation systems. Some are mode-dependent — such as VOR, DME, ILS, and TACAN for aviators — and thus not useful to other modes: time/frequency, maritime, land-mobile or handheld.
So, yes, we agree with the government’s assessment that low-frequency (LF), generally referring to eLoran in the United States, is the best, very wide area, terrestrial, wireless alternative, and is an essential component of any resilient PNT framework. Irrespective of whether the implementation is Loran-C, eLoran or LFPhoenix, LF is the lowest cost terrestrial PNT solution per million square miles of coverage. All our offerings are focused on the LF portion of the resilience framework. Our offerings easily integrate with any existing PNT technology and have proven in real-world government testing their ability to survive heavy jamming and spoofing environments.
What markets and applications do you target?
RH: Spirent Federal provides simulation test solutions to U.S. government and affiliated organizations. Applications range from core GNSS receiver development to real-time, hardware-in-the-loop system integrations. We have a long history of supplying the U.S. government and contractors with first-to-market products, from Y-code, SAASM, inertial and M-code, to sensor fusion of the latest alternative signals and sensors. We provide test solutions to safety-critical applications that are expected to have the same level of operational performance both in GNSS-available and GNSS-denied environments. Providing a single test platform that can help validate performance in both environments has received positive responses from users in the autonomous vehicle industry.
DS: Aerospace and defense, data-center and communication networks, public safety, industrial control, search and rescue, and space.
Autonomous self-driving mobility solutions move people and goods at appropriate speeds in urban and campus environments. (Image: SBG Systems)
MN: SBG targets a large range of applications including from a relatively small BVLOS drone for remote operation to large hydrographic vessels or airborne survey. We divide the applications into two main categories:
Surveying and mapping, where the inertial navigation system is used to stabilize the measurements from a lidar, sonar or camera to generate high-precision maps.
Control applications, where the PNT and orientation solution is used in real time to feed autopilot or to stabilize a camera. These applications include unmanned vehicles, machine control, camera pointing and more. High resilience is then critical to ensure safe navigation.
JA: Two main applications we are targeting with alternative PNT are surveying and ADAS systems. Both of these applications often make extensive use of lidar systems. We are therefore looking at lidar-based simultaneous localization and mapping (SLAM) algorithms to aid PNT or to provide relative position localization without GNSS. In cases when GNSS is totally unavailable, it is usually possible to set up ground control points. Although these cases are limited, they give much more flexibility in options. Anticipating a future where autonomous driving is the norm and not the exception, new building projects will need to be planned with the adequate systems in place to allow for them, and this will include a system such as UWB.
CS: Our employees have been involved in the design, development, deployment or sustainment of every Loran-C and eLoran system site in the world (transmission, control or monitor) since the mid-1970s, including components of the Russian Chayka system. Our service provider and end-user technologies are operationally proven in commercial and military environments. We specifically target the maintenance and upgrade of existing systems, as well as the implementation of new systems, globally.
Which of your products directly address the need for alternative PNT?
RH: In a broad sense, Spirent offers a market-proven and innovation-driven solution portfolio for the simulation of inertial sensors through the SimINERTIAL and SimSENSOR product lines, seamlessly integrated with our GNSS simulation. Spirent is actively engaged with several alternative RF vendors to incorporate signal simulation capability and will offer an alternative RF navigation product in 2021 called SimAltNav Replay. This product will allow for concurrent GNSS and alternative RF signal simulation. Additionally, Spirent offers many other alternative PNT solutions for testing resilient systems for connected vehicles and sensor-fusion algorithms for tactical and military-grade systems. We are developing new products to incorporate an open Ethernet interface allowing for open-source Ethernet-based sensor simulation.
Remotely controlled rovers are used to test and practice complex tasks in Mars-like desert environments. (Artist’s Rendering: Stocktrek Images_Stocktrek Images_Getty Images)
DS: Our time servers are equipped with high-quality precise internal time references such as OCXOs or atomic clocks and then disciplined by external references such as GNSS. They are resilient because they can operate precisely for long periods in GNSS-denied situations as standalone devices in holdover mode or from multiple alternative references, such as:
network-based NTP, PTP and PTP WR time services
wireline references from IRIG, 1PPS or ASCII time code
LEO PNT reference from the STL signal
eLoran when available
They are also resilient because they detect and mitigate interference from the GNSS signal before it can corrupt the PNT solution.
Our GNSS simulators are adding alternative PNT features to provide a complete test and evaluation solution for resilient PNT systems. We have recently added INS/IMU test features and have integrated with Anritsu’s cellular test stations to evaluate and qualify combined GNSS/cellular location functions. Orolia GNSS simulators support generation of custom GNSS signals and playback of IQ waveforms, and provide complete toolsets for GNSS jamming and spoofing testing. This allows creation of the threat environment to allow evaluation of alternate PNT signals as backup or alternative to GNSS. Orolia offers an open-source framework allowing any end user to develop their own sensor plug-in leveraging the Skydel simulation engine.
Our Resilient PNT for Defense product line includes the VersaPNT, which uses alternate non-GNSS PNT sensors such as IMUs, barometers, wheel ticks, INS and non-GPS-based LEO satellites. Alternate RF navigation or non-GNSS sources of radio frequency (RF) are of interest in highly degraded or contested signal environments. Interest is focused on low-Earth-orbit (LEO) constellations. These systems offer high receiver signal power (relative to GNSS) and a secure and resilient link to augment GNSS.
MN: All our products are designed to answer to challenging GNSS conditions, starting with our Ellipse series, which includes an industrial-grade IMU capable of coping with short-term GNSS outages. Its miniature size allows integration in robotics and also makes it suitable for cost-sensitive applications. Our Apogee and Horizon series, with their navigation-grade IMUs, are the most resilient systems in the event of GNSS outages. These products reach very high-end performance in real time, but become exceptional when used with our post-processing software Qinertia. Tightly coupled algorithms make the solution capable of coping with long-term GNSS outages.
JA: We have previously created solutions using retroreflective strips for path following with driving robots. and we are also compatible with Locata’s system, a large infrastructure solution popular for automation in shipping ports. More recently, we have released an offering for UWB in an integration with Pozyx. This is perfect for GNSS-denied environments as a direct replacement for what GNSS can provide in terms of position information. We are also exploring alternative ways to synchronize clocks and get timing information. This year we have developed PTP functionality on all of our devices. Alternative PNT is going to be vital as we look to the future of navigation and thinking about how we can navigate flawlessly anywhere and address more complex environments, particularly urban areas.
CS: We are focused on the provision of terrestrial low-frequency equipment and systems for primary, co-primary, alternative, complementary and backup PNT. We provide all the products and services required to design, develop, install, certify, operate and maintain Loran-C, eLoran and LFPhoenix equipment and systems. We provide the technology to perform coverage diagrams and site surveys; all the equipment required at a transmission site; all the equipment required at a differential reference station or quality-of-service site; all the equipment required for a monitor and control site; ASF measurement and analysis equipment; and various models of end-user equipment (including receivers and antennas) for the timing/frequency, maritime, aviation, land-mobile and handheld markets.
Alternative. Complementary. Backup. Co-primary. These are some of the terms used to refer to sources of positioning, navigation and timing (PNT) data other than GNSS satellites.
The four current GNSS constellations — supplemented by two regional ones and by public and private augmentation systems — have firmly established themselves as the primary source of PNT data by virtue of their accuracy, reliability, global coverage and ubiquitous use. Yet, this widespread dependency on them — especially on GPS — coupled with their well-known vulnerabilities to jamming, spoofing, other RF interference, multipath, solar flares and space debris (see page 10) — make the development of alternative sources of PNT data imperative. In fact, the U.S. Congress has repeatedly mandated it.
Typically, when talking about alternative PNT, we are referring to sources of PNT data that either were not originally developed for navigation purposes — such as television broadcast towers used as “beacons of opportunity” — or that use a higher broadcast power or a different frequency band than GNSS. They include legacy systems and new versions of legacy systems, such as eLoran.
“The only replacement for a GNSS is another GNSS.”
Other non-GNSS sources of PNT data have a wide range of benefits, limitations and costs, including infrastructure requirements. Most provide only the P and the N, or only the T, in PNT. Inertial systems, for example, once initialized can provide positioning and navigation, but need to be periodically re-initialized to compensate for their drift. Therefore, while excellent for maintaining the navigation solution during short GNSS outages and very helpful in identifying false GNSS measurements due to multipath, they are no replacement for GNSS. Cameras, radar and lidar, while often excellent sources of relative positioning, cannot provide absolute positioning.
It is even harder to replace GNSS when it comes to timing. Already enormously important in synchronizing the Internet, financial transactions and broadcasting, this service is essential to the development of complex new systems, such as integrating autonomous and legacy vehicles into digital traffic networks.
As in other human enterprises, the key to resiliency in PNT is diversity: a mix of systems based on sufficiently distinct technological foundations so that a threat to one does not imperil the other ones. Additionally, having a variety of available sources of PNT data will enable users to choose the ones most suited to their platforms.
However, we need to distinguish between technologies that can assist GNSS, such as inertial, and those that could substitute GNSS. I agree with Chuck Schue’s definition of the latter (see cover story, page 28): “an alternative PNT solution is one that is readily available; provides an easy and seamless transition to/from the primary or other alternatives; allows continuity of operation at a possibly degraded, yet usable, level of accuracy, availability, integrity or continuity; and is dissimilar enough from the primary solution to withstand the effects that might be affecting it.”
Ultimately, Schue pointed out to me, “the only replacement for a GNSS is another GNSS.” So, let us stop referring to systems that are not true substitutes for GNSS as “alternative PNT.” Complementary is a more appropriate adjective.
The International Marine Contractors Association (IMCA) has published “Guidelines on the use of GNSS for tide calculations” (IMCA S 027). It provides an overview of how GNSS can assist in more accurate real-time direct measurement of tidal changes. IMCA S 027 is available for members to download free of charge, and costs £50 for non-members.
IMCA S 027 includes sections on
tide theory
geodetic reference systems and tidal datums
tides from GNSS
quality assurance and quality control
glossary, references and a list of further reading
“As with horizontal positioning, vertical positioning is referenced to specified datums,” explained Nick Hough, IMCA’s technical adviser for Offshore Survey. “Unlike land surveying, where vertical measurements (elevations) are made from and to a known, fixed position, vertical measurements offshore (depths) are taken against a moving dynamic surface.”
“All absolute depths recorded from survey activities need to be adjusted for tide and reduced to a known constant vertical datum such as Mean Sea Level (MSL) or Lowest Astronomical Tide (LAT),” Hough said. “The effect of tides will result in depth differences at different times of the day, and at the same times on different days.”
“Advances in GNSS technology enable accurate and consistent calculation of height above a known datum, which means reliance on tide gauges or tide prediction tables is no longer necessary,” Hough said.
Autonomous vehicles are being tested both on open roads and in controlled environments. (Photo: Trimble)
The advent of autonomous vehicles (AVs) is one of three revolutions in the automotive industry that will likely change this country as much as cars did over the last century. The other two are the conversion from internal combustion engines to electric ones and the integration of cars into digital traffic networks.
Once mass deployed, AVs promise to dramatically reduce the number of traffic fatalities (42,000 in the United States in 2020, a National Safety Council report shows). They will never be sleepy, distracted, aggressive or drunk — nor will they engage in such inane human driving behaviors as texting while driving, playing chicken with bicyclists, or running red lights. They also promise to reduce fuel consumption, harmful emissions and traffic congestion by optimizing routes and increasing the number of people using car services instead of owning their own car.
To realize this vision, however, cars will have to do a lot more than just find their way on their own. They will have to perform flawlessly in an unpredictable world that includes toddlers, reckless drivers, fallen trees, sinkholes, construction and accidents.
Among the many sensors aboard an AV, the GNSS receiver has a unique role. It is the only one that can provide absolute positioning, in the form of latitude and longitude coordinates, to within a couple of decimeters anywhere on Earth. As such, it is “a key enabler to a lot of the vehicles to know precisely where they are and whether it is safe to activate autonomous systems,” says Gordon Heidinger, automotive segment manager, Autonomy and Positioning division at Hexagon.
A GNSS receiver cannot achieve the level of accuracy required for autonomous driving without robust corrections. Fifteen years ago, the state of the art was real-time kinematic (RTK) corrections. However, “the cost of that equipment exceeded the cost of a small car at that time,” recalled Steve Ruff, general manager, On-Road Autonomy Division at Trimble. “They were targeting a system cost of about $200. Today, that number is below $50, including the antenna, the GNSS positioning engine, and the software that runs on it.”
Today, all automotive manufacturers are using a form of precise point positioning (PPP) corrections, which is a one-way broadcast, as opposed to the two-way communication between a base station and a rover required for RTK. This means that a single correction stream can serve an entire continent, Ruff pointed out. “Once a vehicle is manufactured, we will support it with our PPP corrections stream for at least 10 years, which is the typical service life of a vehicle.”
Obstacles to Adoption
To achieve mass-market adoption, AVs will have to overcome numerous and complex obstacles:
The technical difficulty of dealing with a limitless number of unanticipated challenges, such as poor visibility because of weather conditions, unpredictable human behaviors, complicated obstructions, detours and potholes
The need to map millions of miles of roads, develop vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communications, and protect vehicle software from hackers
The difficulty, if not the impossibility, of handing off control to a human quickly enough to be safe when the system is unable to deal with a complex situation
Questions about legal responsibility and insurance liability
Ethical dilemmas about how to program the system to respond in emergencies
The development of appropriate federal and state regulations
Resistance from paid drivers who fear losing their jobs, including 3 million U.S. truckers, and from many other drivers, who fear losing control over their safety.
Trimble has approached all the major car manufacturers, has several programs in development, and has received multiple positioning requests for information (RFIs), Ruff said. “In 2018, Trimble’s RTX corrections service was the first solution adopted for production use in passenger vehicles, providing absolute precise positioning for General Motors’ Super Cruise system.”
Additionally, Trimble is working with Qualcomm and with SiriusXM, which will deliver Trimble’s RTX corrections over its satellite network, just like it does with music. “It is a good partnership because about 80% of the vehicles in North America are coming equipped with SiriusXM radio technology,” Ruff said. “The OEMs do not have to buy any additional hardware.” RTX corrections can also enter a vehicle via cellular IP, L-band satellite broadcasts and, potentially, over a V2I link.
Hexagon has proposed a PPP solution for automotive, “mainly because we essentially have the world covered with base stations, and that is a hard thing to do,” Heidinger said. “We have been running a corrections network for a very long time.” PPP’s one-way broadcast offers better cybersecurity because the GNSS receiver does not have to disclose its position, he added.
Swift Navigation is building a global corrections network. To make it suitable for the automotive market, the company is aiming to make its corrections service affordable and scalable. “We realized quickly that neither of the traditional RTK and PPP approaches were going to meet those requirements,” said Fergus Noble, company co-founder and CTO, “so we invested in developing a corrections service pretty much from the ground up.”
RTK provides high accuracy and short convergence times but is typically costly to deploy because it requires a very high density of stations, Fergus explained. As a consequence, most providers do not have continuous coverage over a wide area. Conversely, while PPP is a true global solution, it is less accurate and takes a long time to converge. “That may be fine in a marine or land-surveying application, but not if you are driving through city tunnels and bridges and need it to be able to reacquire a high-accuracy position within a matter of seconds. Therefore, we took a hybrid approach, together with a lot of new IP that we developed.” The service provides coverage in all the United States and most of Europe, and is being tested in Japan, South Korea and Australia.
Accuracy and Integrity
A common target accuracy for lane-level positioning is 20 cm 95% of the time. That means that AVs need to know when their positioning accuracy falls beneath that threshold. “We are building into our positioning solutions an accuracy metric that is output along with the position information we are providing,” Ruff said. “[The metric] can be used by the intelligence in the system to decide whether it can rely on the GNSS solution or needs to switch to one of the other complementary technologies because GNSS accuracy is not fulfilling its lane discipline.”
Heidinger noted the importance of economies of scale when mass-producing vehicles, where cost and ease of manufacturing become factors. “We can take some of our high-end equipment and get you 2 cm of accuracy with this technology, but the price point and the feasibility of this going into mass production for automotive is not favorable,” he said. “So, we’ve taken the approach of providing a software positioning engine that can be fit onto any hardware.”
Hexagon is developing products in partnership with STMicroelectronics, using the company’s Teseo V family of measurement engines. “ST is one of the established leaders of automotive GNSS solutions,” Heidinger said. “We take their measurements and put our positioning and corrections solution behind that to give positioning with lane-level accuracy.”
Noble agrees on the importance of knowing the reliability of a vehicle’s GNSS-based lane accuracy. The prevailing approach, which fuses data from GNSS and other sensors, makes it acceptable for one data source to be temporarily unavailable if the system is aware of that outage, he said. “That is where you start to see Swift, and others as well, focusing on the notion of integrity.”
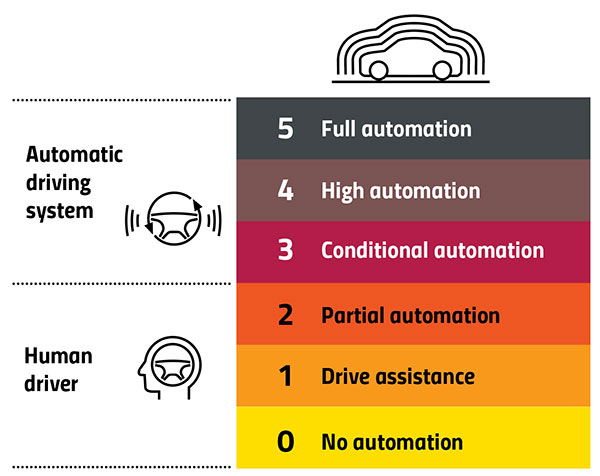
An AV’s level of autonomy determines its behavior during GNSS outages. For systems with Level 2 autonomy and below, the driver must remain engaged, while Level 2+ and Level 3 systems will alert the driver to retake control when needed. If a driver of a Level 2+ or higher system fails to reengage, the AV’s reaction depends on the system and manufacturer.
“When we start to see Level 3 or above self-driving systems come onto the market, they will require that the GNSS component has an ISO 26262 safety certification,” Ruff said. “Many companies, including Trimble, are going through, or have gone through, the process of safety-certifying their offerings. As part of the AV system’s safety architecture, they will build in the capability to safely curb the vehicle if the system detects a malfunction or a spoof or some other type of problem.”
Automation Levels
In 2014, the international Society of Automotive Engineers released a standard, adopted in 2016 by the U.S. National Highway Traffic Safety Administration, that classifies cars in six levels, ranging from Level 0 (no automation) to Level 5 (full automation, meaning vehicles that can handle the full spectrum of road and traffic scenarios without any assistance from the driver). While many production models already incorporate various forms of Level 1 driver assistance, no current production car exceeds Level 2, or partial automation, which requires the driver to monitor the vehicle’s surroundings and take over as necessary. No test vehicle has yet achieved Level 5.
Image: GPS World
Other Sensors
Beyond lane-level positional accuracy, safe driving also requires avoiding collisions with other vehicles in the same lane or straying into it. Cameras, lidar and radar will detect other vehicles as well as fixed infrastructure and random obstacles, measure their distance, and monitor their movement.
While lidar scanners are better than cameras as detecting sharp-edged features, such as curbs, cameras are better at detecting and interpreting visual cues, such as road signs and the location and curvature of lane markers. In bad weather, radar is essential, because radio waves, unlike light waves, can penetrate rain, snow, fog and even dust, enabling radar to “see” where cameras and lidar cannot. However, radar sensors cannot see much detail, and cameras do not perform well in conditions with low light or glare.
Besides providing data about a vehicle’s trajectory, inertial navigation systems (INS) also measure its attitude (roll, pitch and yaw), enabling the software to better correlate and interpret data from the other sensors.
For example, when a car brakes sharply, its front end goes down; any forward-facing sensors measure distances to points closer to the car than they did a moment earlier, when its chassis was parallel to the street surface.
INS can also detect unsafe conditions, such as excessive slip angle, which is the angle between the direction of the rolling wheels and the vehicle’s true heading. A slip angle as small as 0.5 degrees can trigger skidding, spins or rollover, especially in the case of SUVs and tall trucks. Wheel-speed sensors also help verify the vehicle’s movement.
“All these technologies have their limitations,” Ruff said. “However, if you design the system, including all these technologies, then you can come up with a robust, safe combination that will enable autonomous driving.”
In addition to helping to avoid collisions, these other sensors provide relative positioning by comparing the images they acquire with highly precise maps to help locate the vehicle, especially in urban environments, which are well mapped and rich in recognizable landmarks.
Imagine an AV moving through different environments. It might travel from a city with urban canyons that degrade GNSS navigation, yet with landmarks that help relative positioning, to a rural environment devoid of both. The AVs’ algorithms must constantly weigh how much to rely on the different sensors. “Many of the OEMs and car companies are seeing that even rain mist on a highway is very bad for lidar and cameras, because it creates a big blur, but that is where GNSS will perform really well because it is open sky,” Heidinger said. “So, the two types of sensor systems complement each other very well.”
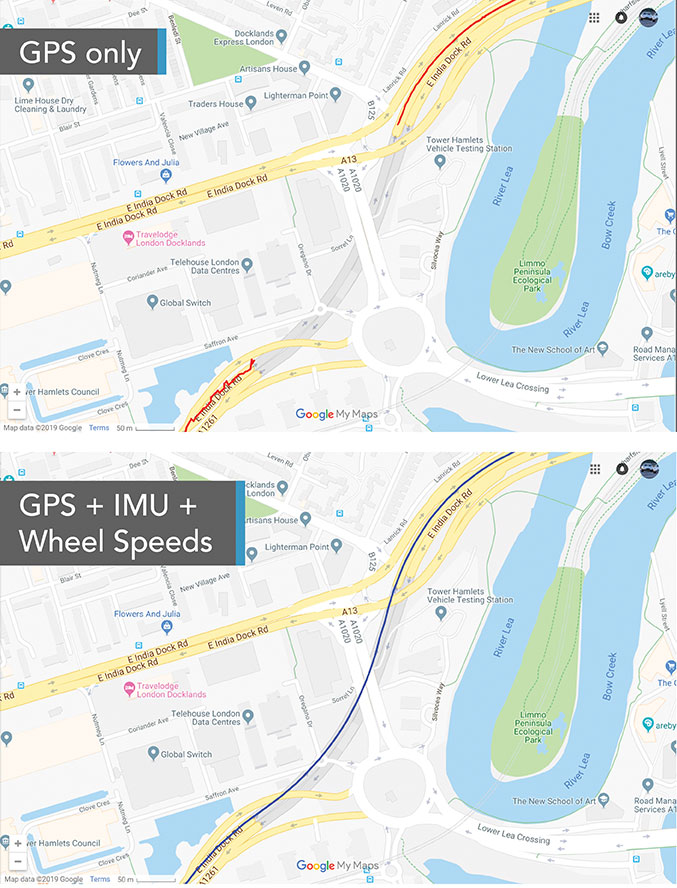
“Odometry sensors, such as a wheel-speed sensors, minimize any potential drift and add robustness to data that may have a GNSS outage of greater than 5 seconds, such as longer tunnels,” said Wesley Hulshof, principal engineer – ADAS Testing at Racelogic.
Photo: Racelogic
Noble sees a split in the industry. Companies such as Waymo and Cruise are pursuing Level 5 autonomy and are “heavy users of lidar” as well as other sensors. Companies such as Swift are focusing on Level 2 and Level 3 series production vehicles. “If you are making a mass manufactured vehicle for the production market, it rules out using a lidar sensor,” Noble said. “It is just too costly and complex right now to use. So, typically, if you look at the systems that are out on the market today, such as a Tesla Autopilot or a GM Super Cruise, they are very reliant on the camera as the primary sensor. Obviously, also inertial and some use of radar.”
Maps and Communications
While accurate and up-to-date maps have an important role to play in making autonomous driving possible, the more detailed maps are, the more the world they describe is constantly changing.
Meanwhile, the sensors keep improving and dropping in price, making maps less important. In the end, AVs — like human drivers — will probably rely much more on their ability to “see” and analyze their environment moment-to-moment.
Also like their human counterparts, they will gain experience. Unlike human drivers, however, AVs will be able to instantly share their experience with every other vehicle in their area via vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communications.
V2V communications will enhance safety by informing AVs of the trajectories of nearby vehicles. If a vehicle is speeding toward an intersection and not slowing for a red light, it will be communicating its position and trajectory to other cars over a V2V link, Ruff explained.
“Then your car can make the intelligent decision to pump the brakes and avoid that collision. The same positioning stack that operates as part of the AV stack can also be used to support V2V-type applications, and the position of the vehicle will be much better than what the current V2V spec states.”
Different Approaches
Each GNSS manufacturer is taking a different approach to AV positioning.
The worlds of traditional automotive positioning and the products on which NovAtel has historically focused are coming together, Heidinger said. “The autonomous technology is demanding it and pushing for higher performance and safety-of-life functionality. Hexagon is bringing high-performance positioning solutions to the automotive industry in a manner that accepts automotive manufacturability, quality and efficiency.”
The company has also joined the 5G Automotive Association (5GAA), a large consortium developing AV solutions. “There are probably 100 companies in the industry coming together and helping to develop that vehicle-to-network communications solution, including telecom partners and automotive partners, and we are providing the GNSS expertise,” Heidinger said. “To meet the high-volume production-intent applications, including automotive quality, we recently developed a receiver based off the ST Teseo V family of measurement engines. We have an ST Teseo V set of chips on the PIM 222A product that launched in May geared exactly toward the automotive market.”
By contrast, Trimble is not focused on providing GNSS receivers or other hardware. “We allow the Tier 1 automotive manufacturers to architect the system using the components that they have selected from their preferred suppliers,” Ruff said. “We tailor our positioning solution to work with their architecture. So, we are agnostic as to the selection of the GNSS receiver, the IMU, the operating system running on the host system, and the host processor that runs the software. We can adapt our stack to run on virtually any system, using measurements from any GNSS source that meets our API requirements.”
For Swift, its “vision from day one has been to bring this type of precise positioning technology to mass market applications, such as automotive, which is a big focus for us,” Noble said. “That includes autonomy, but also ADAS, HD navigation and V2X. We do not want to be a hardware supplier in the automotive supply chain. Our boards are focused on professional and industrial markets.”
Swift’s automotive software, called Starling, runs on the vehicle’s computer. To generate a precise position, it ingests raw sensor data, as well as corrections data from the company’s Skylark network. “We focus on providing a precise-positioning stack that layers on top of any of this current generation of low-cost, automotive-grade receiver hardware from companies like STMicroelectronics.”
This test in London shows the value of inertial and wheel speed sensors. (Image: Racelogic)
The Future
Speculation abounds as to when AVs will enter mass production and how the transition from human to robotic drivers will take place. “There might be a ‘classics only’ lane in the future,” Heidinger said “that will be the only place where cars are allowed to be driven manually.”
Safety-enhancing automotive devices typically start out as optional extras, then get incorporated into best-practice standards promoted by independent bodies. Eventually, they become compulsory.
Some automakers have committed to creating their own AVs, while others are intent on creating a turnkey solution to transform conventional cars into driverless models. However, the initial market for AVs likely will be commercial fleets rather than individual consumers.
“It will still take quite a few years before we see cars take over and drive themselves, because legislation, insurance and these sorts of things will have to happen along with the technological advances,” Heidinger said. “But the positioning side is becoming more defined. We are seeing things like L5, the Galileo constellation, coming in and becoming more available. There are more constellations providing more data for use in our solutions, so that is promising.”
Swift’s Noble said, “Most of the major manufacturers working on Level 2+ and Level 3 systems are realizing that precision GNSS will be a key component of their architecture. Most of the major OEMs have signaled some level of intent to integrate this technology. Most are tracking to start the program next year,” he added.
“We envision that in five or six years every vehicle will have a single positioning utility on board that will serve all the location-aware applications on the car — whether it is an autonomous vehicle, V2V or V2I,” Ruff said. “It will meet the most stringent accuracy requirements from all the applications and serve navigation, telematics, security, V2X and AV/ADAS applications.”
CHC Navigation (CHCNAV) has released the AlphaAir 450 (AA450) lidar system, a lightweight, compact all-in-one sensor for unmanned aerial vehicles (UAVs).
Featuring an inertial measurement unit (IMU), GNSS, 3D scanner and camera, the AlphaAir 450 solution is suitable for power-line inspections, topographic mapping, emergency response, agricultural and forestry surveys. The unit is easy to use, and can be rapidly deployed in the field to collect geospatial data.
“Despite the fact that the lidar scanning is an efficient technology to capture 3D data, it still often remains costly and complex to operate,” said Andrei Gorb, product manager of CHC Navigation’s Mobile Mapping Division. “Taking that into account, we introduce the AlphaAir 450 (AA450), a breakthrough lidar scanner that delivers user-friendly and high-accuracy capabilities at a reasonable price.”
Key aspects of the AlphaAir 450
Lightweight. The lidar’s weight is a constraint for any drone. The AlphaAir 450 weighs 1 kg, which is suitable to most drones’ payload requirements. The lighter the unit, the longer the operating time of the drone, and the greater the productivity. The AlphaAir 450 can be easily mounted on UAVs, making data capture efficient.
Advanced Accuracy. By combining industrial-grade GNSS with a high-precision IMU, the AlphaAir 450 can easily achieve an absolute accuracy of 5 cm (vertical) and 10 cm (horizontal) for small survey areas — typically adequate for the most use cases. To further improve precision and accuracy, users can apply adjustment algorithms in the CHCNAV CoPre software.
Industrial Reliability. Featuring IP64 high-level protection, the AlphaAir 450 extends its operating temperature capabilities, down to –20° C and up to +50° C in any field environment. This can increase users’ return on investment by providing more field survey days in a year.
Centimeter-level positioning and high-accuracy orientation of machinery enable automation of many construction, mining and farming tasks, and take them one step closer to being performed by autonomous machines. Machine control increases jobsite safety, operational efficiency and productivity.
Using data from GNSS satellites, total stations and 3D models, machine-control hardware and software solutions determine a machine’s current position on the Earth and compare it with the desired design surface, mining task or cultivation technique. They also monitor and sometimes control the position and orientation of implements — such as blades, buckets and seeders — with respect to the machine. By talking directly to the machine’s hydraulics, machine automation shifts responsibility for accuracy and speed from the operator to the technology.
On construction sites, automation guides motor graders, excavators, dozers and other heavy machines, making operations easier to manage. This makes contractors more productive and experienced operators more efficient. With this technology, less experienced operators are able to take on more complex tasks, and all operators become more accurate. Machine automation also increases the capabilities of the machines themselves, so that excavators and compact machines are now doing finish grade work once reserved for larger and more expensive dozers.
Operators in the cab and engineers and supervisors at their desks can control and monitor progress in real time, with views of the whole layout as well as specific slopes, roads, ditches and other elements, including those under water.
Using GNSS guidance to aid application of fertilizer, pesticides and herbicides saves time and money. (Photo: Septentrio)
About half of all motor graders and a third of all dozers use positioning sensors and a display to provide operators with the position of the blade with reference to the target grade. A typical machine control set-up consists of a GNSS receiver and a display (jointly referred to as a “cab kit”) and inertial measurement units (IMUs) on the blades and other implements.
From the display, the operator loads a project design, which tells the system the cut, fill and other design information it needs. The operator then chooses a lane and may choose a vertical offset, which temporarily adjusts the design grade, making it possible to accomplish the work in steps, from rough to finish grading. Operators can also record points and scan a pavement in real time as they repair it.
While used by the construction industry on earthworks equipment since the late 1990s, machine control has recently benefited from:
The increase in the number of GNSS signals available, particularly on the new L5 frequency
IMUs, which measure blade movements with respect to the machine 100 times per second, one order of magnitude more than non-IMU grade-control systems
The growing availability of continuously operating reference stations (CORS) and other GPS networks, which eliminate the need to set up a base
New mastless systems, which integrate a receiver into the top of the cab and connect it wirelessly with IMUs to orient the blade, obviating the need to install a long mast pole on the blade and connect it by cable to the receiver and improving safety, visibility and equipment durability
New interfaces designed to be as easy to use as a cell phone, shortening the operators’ learning curve.
While these developments are hastening the advent of autonomous construction, mining and farming machines, remaining barriers to this vision include hardware and software issues as well as questions of data exchange, legal liability and operator training — issues analogous to those facing the development of autonomous cars and trucks.
The DINO is a one-ton farming robot made by NAIO Technologies that operates autonomously using GNSS positioning and maps for navigation. Of the 170 NAIO farming robots currently in operation, about 30% are DINOs, which are typically used on large farms.
In 2016, NAIO and Septentrio, a manufacturer of industrial high-end GNSS technologies, began to research the integration of full GNSS solutions into NAIO’s robots.
Today, the DINO carries a Septentrio NR3, consisting of a GNSS receiver and antenna in a single housing, which provides it with RTK centimeter-level positioning accuracy. Farmers can use the NR3 to map their fields, then attach it to the DINO to guide it.
The DINO automates weeding within complex and quickly changing environments. NAIO plans to soon add seeding and fertilization to its robot’s capabilities.
To operate reliably in the narrow lanes between crops, the DINO requires an accurate GNSS receiver with strong resistance to multipath and jamming.
The safety of field hands and the protection of the crops also require the receiver to have good integrity, which is a measure of the trust that can be placed in the correctness of the information it supplies. Accuracy, robustness, and integrity are all strong suits of Septentrio’s NR3.
While the DINO mostly operates continuously, it sometimes stops to avoid animals or humans, or for other safety reasons. A major advantage of the NR3 and other sensors that NAIO is using, is that they enable the robot to perform cold-starts very rapidly and with a stable heading.
Machine control, guidance and automation defined
Using GNSS guidance to aid application of fertilizer, pesticides and herbicides saves time and money. (Photo: fotokostic/iStock/Getty Images Plus/Getty Images)
The terms machine control, machine guidance and machine automation are not interchangeable.
Machine control is a generic term that refers to the integration of positioning tools into a construction, mining or farming machine to determine its position on the Earth and relative to a desired design surface, mining task or cultivation technique.
Within machine control, machine guidancesystems display these data in the cab — assisting the machine’s operator in steering the machine and in maneuvering its implements to shape the ground, mine minerals, plant seeds or perform other related tasks — while machine automation systems directly steer the machine, achieving greater levels of precision than human operators could. The term automated machine guidance (AMG) is sometimes also used.
Abstracts for the ION GNSS+ 2021 show, “GNSS + Other Sensors in Today’s Marketplace,” are due March 5.
ION GNSS+ 2021 will be held Sept. 20-24 at the St. Louis Union Station Hotel. The show will also include a virtual option.
The 2021 show will feature in-person presentations with video presentations for remote viewers. It’ll also cover two tracks: commercial and policy tracks, and research tracks.
The commercial and policy tracks will include high performance and safety critical applications, status and future trends in GNSS, and mass market and commercial applications. The research tracks will include multisensor and autonomous navigation, algorithms and methods, and advanced GNSS technologies.
Authors whose abstracts are accepted in these sessions (either as a primary or as an alternate presenter) will have the option to have their papers peer-reviewed.
Photo: Philipp Berezhnoy/iStock / Getty Images Plus/Getty Images
According to a new research report, “GNSS Simulators Market by Component Type (Single Channel and Multichannel), GNSS Receiver (GPS, Galileo, GLONASS and BeiDou), Application (Vehicle Assistance Systems, Location-based Services and Mapping), Vertical, and Region — Global Forecast to 2025,” the market is estimated to grow from $106 million in 2020 to $165 million by 2025, at a compound annual growth rate (CAGR) of 9.3% during the forecast period.
Factors such as rapid penetration of consumer internet of things, the contribution of 5G in enabling ubiquitous connectivity and increasing use of wearable devices utilizing location information are expected to drive the adoption of the GNSS simulators hardware, software and services, the MarketsandMarkets report said.
Market segments
The report stressed several key points in regard to the hardware segment, automotive vertical segment and GPS segment.
The GNSS simulators market, by component, is segmented into hardware, software and services. Of these three, the hardware segment is expected to account for a larger market size in the coming years in the GNSS simulators market as it enables signal simulations and plays a key role in the simulation process.
The GNSS simulators market, by vertical, is segmented into military and defense, automotive, consumer electronics, aerospace, marine and other verticals (agriculture, construction, and rail and road). According to the report, the automotive vertical segment is expected to hold a higher CAGR during the forecast period in the GNSS simulators market.
“GNSS offers a cost-effective and accurate way of determining position in real-time,” the report said. “Ride-sharing apps, such as Uber and Lyft, car-sharing, usage-based insurance apps, dynamic toll charging and parking apps all depend on the real-time location of the car. GNSS offers sufficient accuracy for all these apps by providing location coordinates leading to its adoption in the automotive vertical.”
Next, GNSS receivers are segmented into GPS, GLONASS, Galileo, BeiDou and others, with the others comprised of NavIC and QZSS receivers. The satellite tracking service provided by GPS is useful in various commercial and personal applications. The increasing commercial application of GPS vehicle tracking system for taxi companies and cab services is contributing to the rising adoption of GPS location services. It makes the navigation easier by providing relevant details, such as distance and shortest route to the desired location, the report said.
Market size and location
North America is expected to have the largest market size during the forecast period, with the key factor favoring the growth of the GNSS simulators market in North America being the increase in technological advancements coupled with the rise in government support for the adoption of UAVs. The increasing number of players across different regions is also further expected to drive the GNSS simulators market globally, the report said.
In addition, Asia-Pacific is projected to grow at the highest CAGR during the forecast period, as it has witnessed considerable developments and adoption of solutions across the region. According to the report, Asia-Pacific has a large potential for GNSS and space-enabled applications, and it has a wide consumer base due to its booming economies accompanied by an increasing share of local R&D and technology innovations.
Major players
Major vendors in the global GNSS simulators market include Spirent Communications, Rohde & Schwarz, VIAVI Solutions, Hexagon, Keysight Technologies, u-blox, Orolia, Cast Navigation, Accord Software and System, IFEN, Racelogic, Syntony GNSS, Teleorbit, iP-Solutions, Pendulum Instruments, Saluki Technology, Shanghai Huace Navigation Technology, Averna, GMV NSL, Brandywine Communications, Jackson Labs Technologies, Hunan Shuangln Electronic Technology, Work Microwave, Qascom and M3 Systems.
The Empire State Building sits atop a massive and solid foundation that hardly anyone ever sees. Above ground it has 2.8 million square feet of offices and hundreds of businesses. It houses 15,000 workers. Yet it would all come crashing down if the underlying and unseen foundation weren’t incredibly strong and dependable.
Timing is the unseen foundation of every networked technology, digital broadcast, financial transaction, electrical grid management and of most navigation systems, just to name a few applications. Yet, as GPS World readers know, signals from our dominant source of timing — GPS — are very faint and easily disrupted.
Short term, localized disruptions happen all the time, and many systems have adapted. A delivery driver using a jammer to hide from his boss is unlikely to disrupt a cell base station as he passes by, for example.
Photo: Georgijevic/E+/Getty Images
But more serious threats are out there. More and more hobbyists are finding ways to spoof receivers. Every few decades the sun flares strongly enough to fry satellites or charge the ionosphere. And because there are so few alternatives, GPS and other GNSS have become huge, tempting targets for adversary nations, terrorists, and sophisticated hackers.
Instead of Manhattan bedrock, our timing foundation is sometimes more like shifting sands.
Systems engineering tells us that, if something is essential, there ought to be two, three or more independent ways of receiving it. Most aircraft, for example, have two or three systems powering the flight controls — because controlled flight is important!
The white paper “A Resilient National Timing Architecture” outlines how the United States can leverage existing infrastructure and provide all citizens two, and many of them three, independent paths to coordinated universal time (UTC).
It proposes a national timing back- bone of mature technologies with very different failure modes — GNSS, eLoran and fiber. This combination will provide rock-solid timing at the 500 ns or better level of accuracy relative to UTC everywhere across the nation, and at 100 ns or better in major metro areas. Users accessing two or more systems would be nearly bulletproof to timing service disruptions.
The National Timing Resilience and Security Act of 2018 mandated a terrestrial system to back up GPS timing. Our white paper provides a path forward.
Complying with the law while benefiting current and future technologies should be sufficient motivation. If it isn’t, we must also realize that not acting on this will continue to place us behind other nations such as the United Kingdom, South Korea, Russia and China — all of whom are actively reinforcing their national timing systems.
The task will not be a simple one. Yet America was able to overcome the expense and difficulties of building GPS, at the time the world’s most refined and complex technology, and put it in space. By comparison, establishing a resilient national timing architecture using existing technology in our homeland would be child’s play.
Timing is essential. It is infrastructure for our infrastructure. If our national timing is weak, so is everything that is built upon it.
We will profit from ensuring our timing is as strong, resilient, and easily accessed as possible.