Several interesting things, according to geologists who study data from the global network of geodetic-quality receivers. A team at the University of the Basque Country found the Iberian Peninsula rotating clockwise as Africa closes on Eurasia by 0.2 inches per year (5 mm), near Gibraltar and the Alboran region. Meanwhile, in a process called lithospheric dripping, Earth’s crust is sinking under Central Turkey despite being part of a broader region that has been uplifting for millions of years, according to University of Toronto researchers. Meanwhile, in the U.S. Pacific Northwest, seismic data collected during a National Science Foundation study shows the Cascadia subduction zone actively breaking apart.
Making better robots with GNSS
Image: Robosat Project
Autonomous robot navigation in the wild using satellite-based 3D geographical information (Robosat) aims to provide a scalable multi-GIS high-quality data collection platform through using a quadrupedal robot that can autonomously perform long-distance missions in challenging environments, such as the Alps or Finnish forests. Researchers from Finland, Switzerland, Spain and Romania gathered at Tampere University in Finland to share data, identify relevant GIS and GNSS datasets, and leverage AI for autonomous labeling of large-scale data. Key topics included integrating multi-sensor and multi-GIS data to enhance positioning, planning pilot tests with ETH’s ANYmal robot (pictured) and TAU’s new I/Q GNSS grabber device, and discussing methods for AI-driven data labeling for massive datasets collected in field trials.
It’s all happening downtown
Image: Getty Images / Ivan Pantic
Researchers from Shandong Jianzhu University and the China University of Mining and Technology describe a new smartphone positioning strategy in the Dec. 15, 2025, issue of Satellite Navigation. They use a positioning framework that combines 3D map constraints with multiple GNSS observations. By integrating time-differenced carrier-phase information with probabilistic road matching and factor graph optimization, the approach reduces ambiguity in candidate positions and enhances robustness against non-line-of-sight signals. In field tests, the method outperformed existing smartphone GNSS techniques, delivering more reliable location estimates and smoother trajectories even in severe urban canyon conditions.
2,000 and counting
Image: Getty Images / rvimages
The International Air Transport Association (IATA) has called for vigilance following the increasing number of GNSS spoofing and jamming incidents worldwide. The growing interference poses a significant risk to flight navigation and pilot safety. Of note is a spike in incidents at major Indian airports. Almost 2,000 GNSS interference incidents have been logged at airports in India since 2023, including the airports in Delhi, Mumbai, Kolkata, Amritsar, Hyderabad, Bengaluru and Chennai. IATA represents more than 360 airlines, accounting for 80% of global air traffic.
Ionospheric delay remains a significant error source in GNSS positioning, particularly for single-frequency users and during periods of enhanced space weather activity (Dabbakuti, 2021). While global and regional ionospheric models provide large-scale corrections, they often fail to represent localized ionospheric variability at individual receiver locations (Jee et al., 2010; Osanyin et al, 2025).
Consequently, residual ionospheric errors persist in positioning solutions, degrading accuracy for applications including precise point positioning (PPP), real-time navigation, and single-frequency GPS users (Biswas et al., 2022). Hence, accurate modeling of the ionosphere is essential in tackling the principal challenges in high-precision GNSS positioning.
Vertical total electron content (VTEC), a key driver of ionospheric delay, exhibits strong nonlinear temporal variability controlled by solar radiation, geomagnetic activity, seasonal effects, and local electrodynamics (Osanyin et al., 2023; Seemala et al., 2023). Capturing this variability at individual GNSS stations poses a significant challenge. Advances in artificial intelligence (AI), i.e., machine learning (ML) techniques have emerged over the decades as powerful tools for approximating complex non-linear systems and deterministic geophysical processes, while significantly reducing computational cost (Sarker, 2021). As such, they have successfully replaced repeated full-scale numerical simulations by learning input-output relationships directly from data (Zhang et al., 2025). This paradigm shift is particularly relevant for ionospheric modeling, where long-term GNSS observations provide rich time series well suited for data-driven learning.
Time series forecasting traditionally relies on statistical models such as autoregressive (AR), moving average (MA), autoregressive moving average (ARMA), and autoregressive integrated moving average (ARIMA), which model future values as linear functions of past observations (Kaselimi et al., 2020). They have been widely employed to predict VTEC by extrapolating historical observations. Nonetheless, the classical approaches are inherently limited by assumptions of linearity, stationarity and short-term memory, which restrict their ability to capture complex ionospheric dynamics, particularly during disturbed conditions and over longer prediction horizons. To address these limitations, this study adopts a deep learning-based framework using long short-term memory (LSTM) neural networks for station -pecific VTEC prediction. Unlike conventional statistical models, LSTM networks are specifically designed to learn non-linear temporal relationships and retain long-term memory in sequential data (Hochreiter and Schmidhuber, 1997).
Essentials
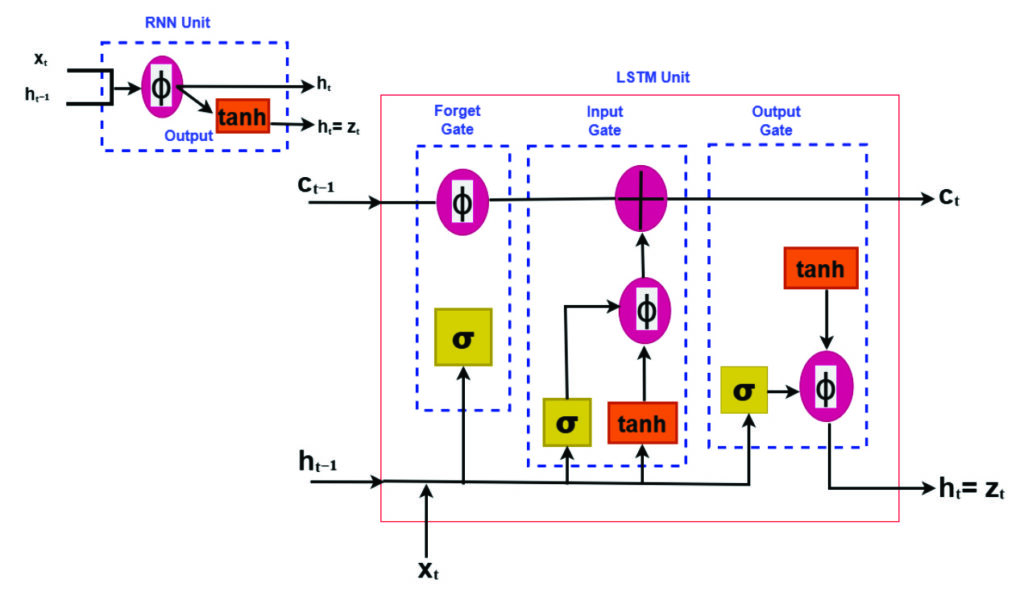
LSTM neural networks for prediction have emerged as a powerful tool for time-series prediction (Hochreiter and Schmidhuber, 1997). LSTM is a type of recurrent neural networks (RNNs) that takes sequences of information and uses recurrent mechanisms and gate techniques (see Figure 1). RNNs are well known for their ability to process single data points and entire data sequences (Gonzalez and Yu, 2018). The LSTM model has various forms for different types of data inputs. The basic condition of LSTM modeling is that all inputs and outputs are independent of each other. The key to the LSTMs is the cell state, which is protected and controlled by the forget, input and output gates, respectively (Gonzalez and Yu, 2018).
FIGURE 1 Comparison of recurrent neural network (RNN) and long short-term memory (LSTM) structures.
Training deep learning modelsremains computationally demanding despite their fast prediction capability. LSTM networks consist of interconnected layers with numerous trainable parameters that must be optimized iteratively to accurately capture temporal dependencies in the data. Training typically involves large historical datasets spanning multiple years, which is necessary to expose the model to varying ionospheric conditions, but also increases computational effort (Thompson et al., 2020). The optimization process relies on iterative algorithms such as stochastic gradient descent and variants, requiring repeated forward and backward passes through the network. As the depth of the model and the length of input sequences increase, so does the demand for memory and processing power. These challenges are particularly relevant when training is performed using graphics processing units (GPUs), where memory limitations and data transfer overhead must be carefully managed (Sarker, 2021).
Like all neural networks, LSTM has trainable parameters (weights and biases). These parameters are optimized by minimizing a loss function using gradient-based optimization. Due to its ability to learn time sequences, gradients must be propagated across time steps, not only across layers. This process is accomplished using backpropagation through time, which computes gradients of the loss with respect to all parameters and accumulates gradients across the sequence. The major advantage of LSTM is the use of its gating mechanism in mitigating vanishing gradients, making backpropagation practical for long time series such as VTEC (Adekunle et al., 2025; Hochreiter and Schmidhuber, 1997; Noor and Ige, 2025).
In recent years, LSTM networks have achieved impressive results in modeling complex physical systems characterized by strong non-linearity and long-term temporal dependencies. Notably, LSTM-based approaches have been successfully applied to atmospheric and geophysical time series, demonstrating superiority in predictive skill compared to traditional empirical and statistical models (see Reddybattula et al. (2022 and references therein). These research results show the capability of LSTM to capture diurnal, seasonal, and storm-time variations. By leveraging historical GNSS-derived VTEC time series, LSTM-based models can adaptively capture both regular ionospheric patterns and transient disturbances, enabling more accurate and robust VTEC forecasts. This data-driven approach directly supports improved ionospheric correction in GNSS positioning, offering a practical and scalable solution to overcome the shortcomings of traditional time series methods.
This study focuses a station-specific vertical total electron content (VTEC) prediction framework based on long short-term time series. The proposed framework treats VTEC prediction as a supervised regression problem. A sequence of past VTEC observations is used to predict future values over one or multiple forecast horizons. Also, emphasis is placed on methodology clarity, practical implementation, and positioning relevance.
Elements: TEC estimation from GNSS measurements
For the purpose of forecasting local VTEC using time series analysis, this study utilized the GPS dataset provided by the Brazilian Institute for Geography and Statistics (RBGE; www.ibge.gov.br/en/) over Santa Maria (SMAR; -20.72o, 306.28o), a station located in Brazil over the period of 10 years from January 2010 to December 2019.
VTEC data were derived from dual-frequency GPS observations at the selected station using the standard ionospheric processing techniques, including slant TEC estimation, instrumental bias correction, and mapping to vertical TEC. For more details, readers can consult the GPS-TEC analysis software developed by Seemala and Valladares (2011), which has been employed in this study for TEC processing. The time resolution is selected to be 15 minutes following an average over a sampling interval of 30 seconds. The resulting VTEC time series provides a continuous record of ionospheric variability with a fixed temporal resolution.
Station-specific LSTM modeling framework
A structured deep learning workflow for station-specific VTEC prediction has been adopted using the LSTM framework. The overall methodology follows a sequential pipeline consisting of data collection, preprocessing, feature engineering, model training, evaluation, validation, and deployment. This workflow ensures reproducibility, minimizes information leakage, and facilitates integration into GPS positioning engines. The focus is on time series learning at a single station, where temporal dependencies dominate and spatial smoothing from regional or global models is undesirable.
Data preparation and model training
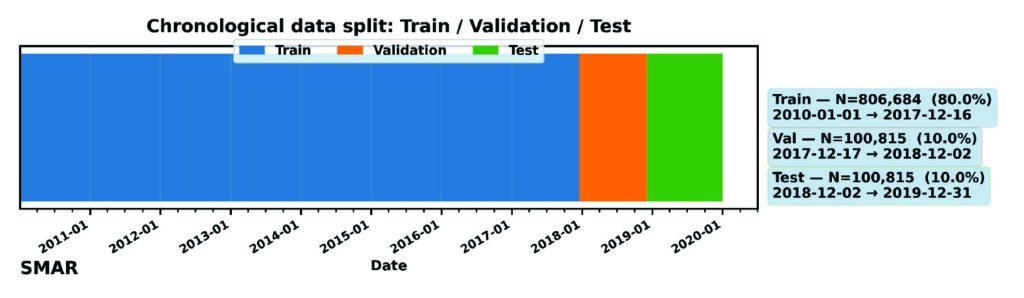
High-quality input data are essential for stable LSTM training. The extracted VTEC time series are preprocessed to remove cycle slips, mitigate differential code biases, and ensure consistent temporal sampling. As shown in Figure 2, for this model (as variations can be considered), the dataset has been divided into training (80%), validation (10%), and testing (10%). The validation is mostly required during training the LSTM deep learning model to ensure generalization and prevent overfitting. Furthermore, preprocessing aims at ensuring capability of the model in handling missing data and temporal consistency checks.
FIGURE 2 Chronological splitting of VTEC dataset for machine learning.
Feature engineering mainly converts raw VTEC observations into structured model inputs such as local time (LT) and day-of-year (DOY) features. These features are normalized prior to training, although normalization is applicable to only the training dataset to avoid future leakage. The model consists of an input layer whose dimension equals the number of input features, followed by a single LSTM layer with 64 memory cells to learn temporal dependencies in the input sequence. A dropout layer with a rate of 0.2 is applied to mitigate overfitting during training. The LSTM representation is then passed to a fully connected (Dense) regression head with nout neurons, where nout equals the number of forecast lead times. Model training minimizes the Huber loss function using gradient-based optimization, while performance is evaluated using RMSE. The optimizer updates the network weights iteratively to reduce the forecast error across the training samples. Early stopping and regularization are applied to further prevent overfitting, particularly during periods of low ionospheric variability. The final outputs are the predicted VTEC at multiple lead times (in this experiment: 30, 60, 120 and 180 minutes). The trained model is suitable for deployment in near real-time ionospheric correction systems: once operational, it ingests the most recent VTEC observations and produces short-term forecasts that can be integrated into GNSS positioning workflows, particularly for single-frequency applications and PPP.
Performance evaluation and baseline comparison
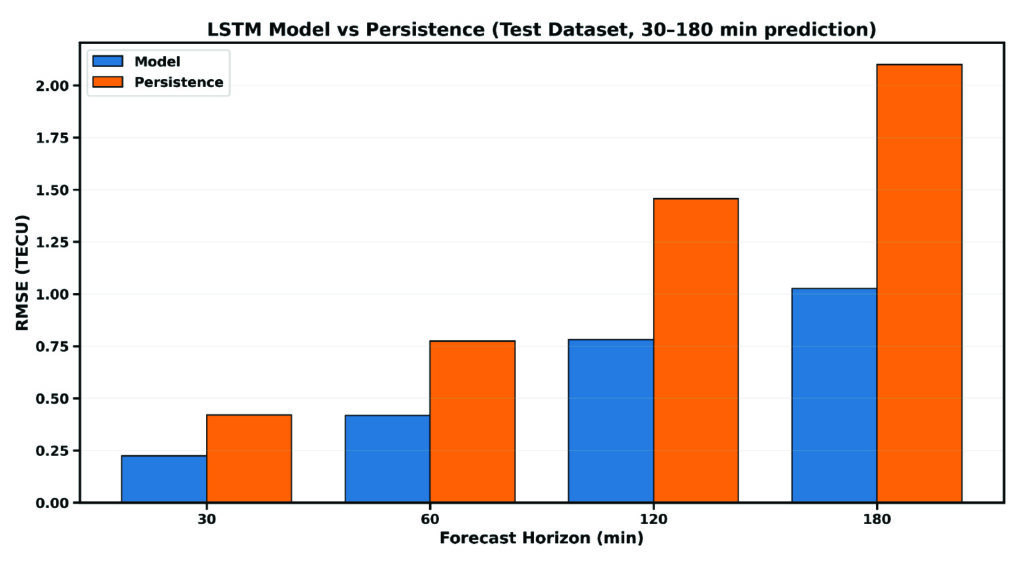
For practical assessment, the LSTM-based predictions are evaluated against commonly used baseline models, including persistence (using the trained model with new data) and skill (the ability of the model to make predictions). These baselines represent the minimum performance expected in operational GNSS ionospheric modeling and serves as internal validation of the overall model’s performance. Evaluation metrics include, but are not limited to, root mean square error (RMSE), mean absolute error (MAE), and relative improvement over persistence (skill). Figure 3 compares the predictive performance of the proposed LSTM model against the persistence baseline on the independent dataset. RMSE increases over time, while persistence largely deviates from the LSTM model, showing the great strength and capability of the LSTM model for time series prediction over the Santa Maria station. For instance, the RMSE of the LSTM model increases from 0.24 TECU to 1.15 TECU from 30 minutes to 3 hours lead time, while that of persistence ranges from 0.41 TECU to 2.25 TECU, respectively.
FIGURE 3 Comparison between the RMSE of the LSTM model and persistence for single-station VTEC prediction.
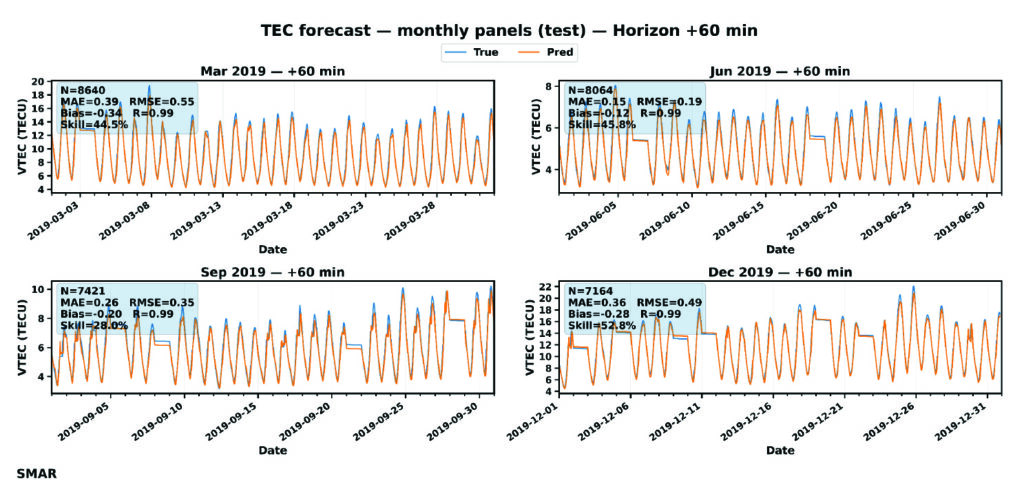
For further evaluation, day-to-day variation of VTEC at 60 minutes lead time is shown in FIGURE 4. GPS TEC (orange curves) shows a strong diurnal cycle with expected daily peaks, while forecast (blue curves) matches these peaks across months, indicating that the LSTM captures the key deterministic component of TEC variability. TABLE 1 or the embedded metrics in Figure 4 summarizes an overall accuracy of the LSTM model using the performance metrics: MAE, RMSE, Bias, R, and skill. MAE and RMSE values change with season — with the lowest reported in July.
FIGURE 4 Day-to-day variation of VTEC at 60 minutes forecast during July to December 2019. The embedded metrics show the performance of the LSTM model for each month of the testing dataset.
Error increases toward December with the largest RMSE in March (0.549 TECU). September shows moderate error levels. Also, correlation is consistent across all months, which confirms the model’s capability to capture TEC changes and day-to-day variability patterns. The model is nearly unbiased as the bias is consistently close to zero, meaning that the LSTM does not drift systematically and shows that the model underpredicts GPS VTEC. This characteristic is important for operational GNSS corrections, because biased VTEC forecasts would translate to persistence positioning errors. Going by the skill values, even at 60 minutes forecast, the model provides ~27%-52% improvement over persistence. This result implies a major indicator of real predictive ability, especially for GNSS applications.
Statistical validation
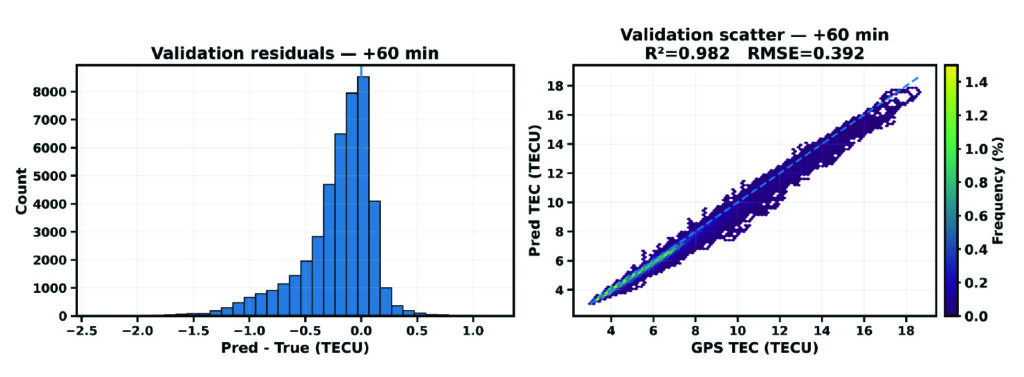
Figure 5 presents the diagnostic of the validation dataset for the SMAR station at a 60-minute forecast horizon. It combines the distribution of prediction residuals (left) and density-based scatter comparison between predicted and observed VTEC values. These analyses help explain the overall agreement of the LSTM model forecast during validation.
FIGURE 5 Validation diagnostics at 60 minutes forecast horizon. (Left) Histogram of prediction residuals. (Right) Density scatter of predicted versus observed TEC.
The residual distribution is mostly concentrated near zero, which implies that most predictions deviate only slightly from observations. The right plot shows the scatter density plot of predicted VTEC against observed GPS VTEC. The points are tightly clustered along the dashed line, indicating that the model corresponds very well (98.2%) to the TEC variance in the validation period. Also, a RMSE of 0.39 TECU reflects a relatively low magnitude error. These findings support the reliability of the proposed LSTM model for VTEC forecasting.
Implications for GNSS Positioning
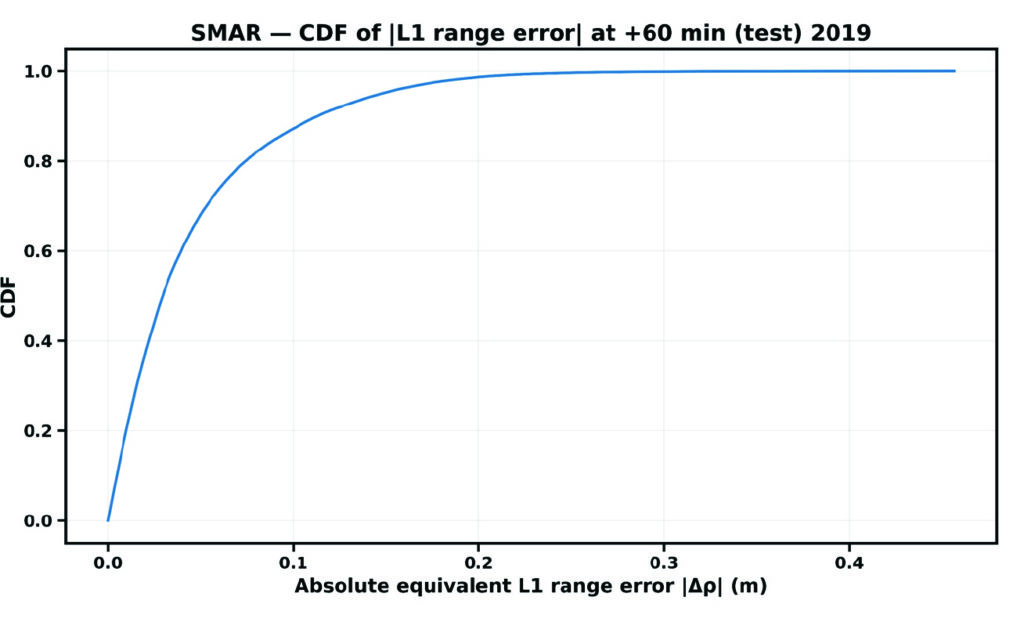
The cumulative distribution function (CDF) of the absolute equivalent L1 error, denoted by |∆ρ|, for the Santa Maria station at a forecast horizon of 60 minutes is shown in Figure 6.
FIGURE 6 CDF of residual VTEC equivalent L1 ranging error at the single station.
The CDF provides a direct positioning-relevant interpretation of model performance. The steep rise at small error values indicates that most samples exhibit low residual range errors, demonstrating strong correlation performance.
Evolutionary
This study demonstrates that LSTM-based machine learning provides a practical and effective approach for station-specific GNSS VTEC prediction during low solar activity. The LSTM model accurately reproduces diurnal and seasonal VTEC variability at the station level. Forecast skill remains stable across increasing horizons, while significant RMSE reductions over persistence confirm the model’s predictive value, supporting the feasibility of LSTM-based station-specific VTEC forecasting for operational GNSS applications. By leveraging historical GPS-derived VTEC time series, LSTM neural networks capture complex temporal dependencies that are difficult to model using conventional techniques. This approach offers a valuable complement to existing ionospheric correction models and represents a promising direction for future GNSS positioning systems. The results presented in Table 1 confirm that the proposed LSTM algorithm can derive an accurate predictive model as far as a 3-hour forecast. The proposed approach improves long-term ionospheric prediction and enhances positioning accuracy.
Month
MAE (TECU)
RMSE (TECU)
Bias (TECU)
R
Skill
Mar
0.39
0.55
-0.34
0.993
44.5
June
0.15
0.18
-0.12
0.994
25.8
Sep
0.26
0.35
-0.20
0.986
28.0
Dec
0.36
0.49
-0.28
0.994
52.8
Table 1 Comparison of VTEC performance metrics of the LSTM model at 60 minutes forecast.
While the results demonstrate the potential of AI-based modeling for station-specific VTEC prediction, further investigation is required to assess its limitations. Future research will investigate the sensitivity and robustness of the data-driven approach under extreme geomagnetic storm conditions and maximum solar activity considering multiple stations over the same region. These experiments will help evaluate the LSTM-based modeling reliance for a better positioning GPS accuracy. In addition, combining efficient training strategies with LSTM-based temporal learning offers a practical and scalable solution to station-specific VTEC prediction. The resulting models will bridge the gap between computationally expensive physics-based approaches and overly simplified empirical models, providing accurate, localized ionospheric corrections that directly enhance GPS positioning performance. Therefore, the Bayesian optimization technique would be integrated during model’s training to tune LSTM hyperparameters (Adekunle et al., 2025), with the aim of reducing computational cost and improving convergence and generalization in station-specific ionospheric modeling. It is very likely that machine learning will play a significant role in near-term ionospheric modeling/prediction for GNSS.
Dr. Taiwo Osanyin is a Ph.D. visitor at York University, Toronto, Canada. Her research interests include space physics, atmospheric sciences, statistics, and modeling of the upper atmosphere. Osanyin received a Ph.D. in space geophysics from the National Institute for Space Research, Brazil, an M.Sc. in nuclear science and engineering from Obafemi Awolow University, Nigeria, and a B.Sc. in engineering physics from Obafemi Awolow University, Nigeria.
Sunil Bisnath is a full professor in the Department of Earth and Space Science and Engineering at York University in Toronto. For more than 25 years, he has been actively researching precise GNSS-focused positioning and navigation solutions and applications. He holds an Honors Bachelor of Science degree and master of science degree in surveying science from the University of Toronto and a Ph.D. in geodesy and geomtics engineering from the University of New Brunswick.
• Adekunle AA, Fofana I, Picher P, Rodriguez-Celis EM, Arroyo-Fernandez OH, Zemouri R. (2025). Optimizing deep learning predictive models: A comprehensive review of RNN and its variant architectures. Applied Soft Computing. Oct 9:114015.
• Biswas T, Banerjee P and Paul A (2022). Impact of low-latitude ionospheric effects on precise position determination. Radio Science, 57(4): 1-11.
• Dabbakuti JK (2021). Modeling and optimization of ionospheric model coefficients based on adjusted spherical harmonics function. Acta Astronautica, 182: 286-294.
• Gonzalez J and Yu W (2018). Non-linear system modeling using LSTM neural networks. IFAC-PapersOnLine, 51(13): 485-489.
• Hochreiter S and Schmidhuber J (1997). Long short-term memory. Neural Computation, 9:1735-1780.
• Jee G, Lee HB, Kim YH, Chung JK, Cho J (2010). Assessment of GPS global ionosphere maps (GIM) by comparison between CODE GIM and TOPEX/Jason TEC data: Ionospheric perspective. Journal of Geophysical Research: Space Physics. 115: A10.
• Kaselimi M, Voulodimos A, Doulamis N, Doulamis A, Delikaraoglou D. (2020). A causal long short-term memory sequence to sequence model for TEC prediction using GNSS observations. Remote Sensing. 12(9): 1354.
• Noor MH and Ige AO (2025). A survey on state-of-the-art deep learning applications and challenges. Engineering Applications of Artificial Intelligence. 159: 111225.
• Osanyin TO, Candido CM, Becker-Guedes F, Migoya-Orue Y, Habarulema JB, Obafaye AA, Chingarandi FS, Moraes-Santos SP (2023). Performance of a locally adapted NeQuick-2 model during high solar activity over the Brazilian equatorial and low-latitude region. Advances in Space Research. 72(12): 5520-38.
• Osanyin TO, Maria Nicoli Candido C, Becker-Guedes F, Migoya-Orue Y, Habarulema JB (2025). Ingestion of GNSS-Derived-TEC Into NeQuick 2 Model Over South America. Space Weather. 23(12): e2024SW004212.
• Reddybattula KD, Nelapudi LS, Moses M, Devanaboyina VR, Ali MA, Jamjareegulgarn P, Panda SK (2022). Ionospheric TEC forecasting over an Indian low latitude location using long short-term memory (LSTM) deep learning network. Universe. 8(11): 562.
• Sarker IH (2021). Deep learning: a comprehensive overview on techniques, taxonomy, applications and research directions. SN Computer Science. 2(6): 1-20.
• Seemala GK, Katual I, Kapil C, Vichare G (2023). Seasonal and solar activity dependence of TEC over Bharati station, Antarctica. Polar Science. 38: 101001.
• Seemala GK, Valladares CE. Statistics of total electron content depletions observed over the South American continent for the year 2008 (2011). Radio Science. 46(05): 1-4.
• Thompson Neil C, Kristjan G, Keeheon L, Manso Gabriel F (202). The computational limits of deep learning. Cornell University, arXiv:2007.05558, 10: 2.
• Zhang R, Li H, Shen Y, Yang J, Li W, Zhao D, Hu A (2025). Deep learning applications in ionospheric modeling: progress, challenges, and opportunities. Remote Sensing. 17(1): 124.
Among the technical approaches being researched this year for GNSS/PNT protection, which do you consider most effective or promising?
Photo: Jules McNeff
“The simple answer is what I have been saying many times before. The most effective way to back up GPS/GNSS is to use the terrestrial technology available from eLoran. It is affordable, long-range, precise and essentially unjammable. However, it’s not what I would call ‘promising’ because that’s not what the government wants to hear. In fact, the government is in the process of dismantling the existing Loran infrastructure that could easily be recapitalized as autonomous eLoran stations. eLoran could provide robust nationwide timing and positioning preservation, including in the northern Pacific Ocean and Alaska, as well as across the Arctic, with Canada, to link up with our allies in the UK and Europe, who are also investing in eLoran. There is no real commercial market in the far north and there are no commercial systems proposed that can provide such coverage in those areas where we are facing challenges from Russia and China today and that will only increase into the future.”
—Jules McNeff
Allison Brown
“L-band jamming and spoofing is now prevalent in many parts of the world. It has now been confirmed that space-based jammers have been active, as well as conventional terrestrial jamming. Anti-jam solutions can only provide protection up to a certain jammer power level and are not a ‘silver bullet’ solution. Moreover, nulling of space-based jammers will also have the effect of nulling parts of the sky where GPS satellites are in view, degrading performance by reducing DOP. Alternative PNT solutions that are not relying on L-band signals are the most effective solution for operations in highly contested, jammed or spoofed L-band environments.”
— Allison Brown
Mitch Narins
“I believe that both orbital and ground-based PNT systems, operating in tandem and integrated properly, are the ultimate solution for critical infrastructure applications, but to get there, ‘the budget-office-inspired problem’ of having to pick one and only one must be abandoned: prevention is usually cheaper than curation. Only after space-based and ground-based PNT designers, developers, regulators and users understand and welcome the essential nature of PNT source diversity will we actually achieve the resilient PNT capabilities that we all need.”
Instead, the ANPR-FASTag hybrid system will continue to rely on ground-based high-speed cameras to identify vehicles and radio-frequency-identification FASTag readers to charge them.
The Ministry of Road Transport and Highways is proceeding with corridor projects relying on automatic number-plate recognition (ANPR) and FASTag systems, which don’t require vehicles to stop. A GNSS toll system tracks the exact location of the vehicle and calculates the distance traveled on a toll roll, ensuring that users end up paying for just the distance they actually traveled.
For several years, the Indian government had intended to implement a GNSS-based toll system based on real-time location tracking. Now, it looks like these plans have been scrapped.
Promoting precious pollinators
Washington State University (WSU) is leading the Pacific Northwest Pollen Atlas (bees.wsu.edu) to map and describe pollen. It aims to determine pollinator health and thus food humans eat that depend on pollination. Honey bees and other pollinators collect pollen from plants within a two-mile radius of their hive.
“We hope to create a database of plants and share the nutrient content in their pollen so gardeners can plant a healthy variety,” said Priya Chakrabarti Basu, WSU assistant professor, Entomology.
Researchers will map pollen varieties collected by citizen scientists in every Washington county over a four-year period and colleagues around the Pacific Northwest are also recruiting to increase the project’s scope. Expected to take decades to complete, the efforts are part of Basu’s larger effort to map pollen nutrition across North America.
How’s the weather out there?
High-resolution atmospheric data is the missing link in forecasting weather. A new approach sharpens GNSS tomography, while showing how the model makes decisions — a transparency critical for building trust as AI enters weather forecasting.
By revealing the hidden details of storms and humidity patterns, the new method can give forecasters the tools needed to anticipate extreme events with greater confidence, according to researchers at Wrocław University, Poland. The team described their deep-learning framework in a paper published in Satellite Navigation in August.
With sharper GNSS tomography, meteorologists can feed more accurate humidity fields into both physics-based and AI-driven forecasting models, significantly improving storm prediction and early-warning systems.
Africa is really huge
Photo: Equal Earth, Strebe / CC BY-SA 4.0
A Correct the Map campaign aims to replace the 16th-century Mercator map because it doesn’t show the true size of Africa, which is three times as large as Europe. Supporters say the historic map — created to guide European explorers — promotes a false view of the continent and its size, fostering a false impression that Africa is “marginal.”
In August, the 55-country African Union endorsed the campaign to have organizations around the world replace the Mercator with alternatives such as the 2018 Equal Earth projection. The African Union is expected to make an official decision to adopt the Equal Earth map in February. The campaign also asks the United Nations and the BBC to adopt the Equal Earth map.
The demand for efficient transportation systems extends beyond traditional development projects, such as subsea transportation tunnels or deployment scenarios where positioning technology delivers centimeter-level accuracy for fleet vehicles. In active conflict zones, positioning signals are more susceptible to jamming and spoofing, which disrupts civilians’ daily activities.
In the northern Israeli city of Haifa, after decades of relying on digital navigation, shopkeepers have started stocking paper maps again. The reason is not nostalgia, but survival in an age of electronic warfare.
The coastal city has become a testing ground for advanced GNSS technologies, where traditional satellite navigation systems regularly fail due to sophisticated spoofing attacks. These attacks not only disrupt military operations but also affect every smartphone, smartwatch and navigation device that relies on standard GPS signals.
Dror Meiri, business development and strategy advisor at oneNav, said that in Haifa, “You start driving. Everything is fine. You know that the drive is going to last for 37 minutes or so, and then all of a sudden, you lose your location.”
Researchers from oneNav conducted a comprehensive GPS resilience test in an active conflict zone near Haifa. The company’s mission was to compare how different navigation technologies perform when under electronic attack.
The Journey North
For the test, four devices were mounted side-by-side on a car dashboard: three leading smartphones and one device equipped with experimental L5-direct receiver technology. All four would make the same journey from south of Haifa toward the city center, passing through zones where GPS spoofing is known to occur.
The drive began in an area free from interference, where all devices accurately displayed their location in northern Israel. But as the car moved north toward Haifa, it entered what researchers describe as a “spoofed zone” — an area where military defense systems actively jam and spoof GPS signals.
While still physically driving through Haifa’s streets, the three commercial smartphones suddenly began displaying a location more than 100 km away in Beirut, Lebanon. A fitness smartwatch included in the test showed the same false location. Only the L5-direct enabled device maintained accuracy to within 1 m of the actual position.
The Technical Challenge
OneNav explains the vulnerability stems from the aging L1 GPS signal on which most consumer devices rely. First deployed decades ago, L1 signals are relatively easy to spoof with commercially available equipment. According to U.S. Federal Communications Commission (FCC) documentation, spoofing has become so prevalent that it affects devices across vast geographical areas; in some cases, every smartphone and smartwatch tested was spoofed across distances exceeding 120 km.
In response to the March 6 FCC inquiry on “Promoting the Development of Positioning, Navigation, and Timing Technologies and Solutions,” oneNav provided technical insights into spoofing vulnerabilities across different satellite navigation bands. The company explained that “spoofing in the L5 band will be much more difficult because the spoofing transmitter must have 10x wider bandwidth and 10x more precise spoofing correlator peaks to capture the L5 receiver. Spoofing transmitter power needs to be 20x higher in the L5 (GPS) band and 40x higher in the E5 band (Galileo) compared to spoofing L1C/A.”
This technical assessment highlights why the newer L5 signal represents a significant advancement in navigation security. The enhanced signal architecture, with its wider bandwidth and more sophisticated coding structure, creates substantial barriers for potential attackers. The exponentially higher power requirements — 20 times greater for GPS L5 and 40 times greater for Galileo E5 compared to legacy L1 signals — combined with the demanding technical specifications, make widespread L5 spoofing both technically challenging and prohibitively expensive for most threat actors.
Beyond the Battlefield
While Haifa’s situation is tied to regional security concerns, the implications extend far beyond conflict zones and affect autonomous vehicles, ride-sharing services, and logistics networks that have become essential infrastructure in modern cities.
“When I want to wait for a bus or public transportation, for gas or something like that, my phone tells me exactly where the bus is and how long it will take to reach the station,” Meiri said. “But the core system for that is the GPS, which is based on the bus, so the bus cannot send the right information to the server.”
Local businesses are grappling with the unreliable GPS environment. According to oneNav researchers, companies in the region — including one that uses drones to clean windows on Haifa’s skyscrapers — face significant operational challenges when their navigation systems are deceived into believing they are operating in a different country entirely.
Meiri, who conducted the oneNav test, notes the challenging conditions affecting transportation in Haifa could emerge in other urban areas as spoofing technology becomes more accessible.
The ground transportation implications are particularly concerning for emergency services. When 911 calls are placed in areas experiencing GPS spoofing, emergency responders may be directed to locations hundreds of kilometers from the actual emergency. This challenge has prompted regulatory discussions about upgrading emergency location accuracy requirements. Current GPS emergency location systems can achieve accuracy within 50 m in ideal conditions, but dense urban environments and electronic warfare zones significantly degrade this performance.
As spoofing technology proliferates beyond military applications, transportation systems worldwide may face the same navigational chaos currently seen in Haifa.
Artificial intelligence (AI) has become part of the daily lexicon, and an endless stream of media reports assert that AI either has affected or will affect most aspects of human life. What is AI and what are its components? How is it being used in GNSS technology? What is the near-term potential of AI in GNSS/PNT? These are weighty, evolving questions for which this column attempts an initial synthesis.
AI definitions and descriptions vary widely. One general and broad definition from IBM (2025) is “Artificial intelligence (AI) is technology that enables computers and machines to simulate human learning, comprehension, problem solving, decision-making, creativity and autonomy.” The idea of thinking machines (Turing, 1950) and the term “artificial intelligence” were introduced in the 1950s (McCarthy, 2007). The 1960s and 1970s saw the development of neural networks. The 1980s brought advances in neural network training and deep learning. The 1990s saw rapid advances in computing power. Big data and cloud computing developments in the 2000s allowed for the management and analysis of large datasets. The 2010s brought deep neural networks/deep learning, and the 2020s have seen the introduction and flourishing of large language models.
This column primarily focuses on the impacts that AI is directly having and could potentially have on GNSS hardware and PNT solutions, including receiver signal acquisition, measurement processing, position estimation, integrity and mitigation of jamming and spoofing. Due to space limitations, it will limit discussion to topics such as GNSS-based sensor fusion, navigation system routing, application-specific customizations, etc., all of which are undergoing significant AI-related infusions. A suitable guide to consider is the list of tasks for which evolving AI approaches can outperform existing methods in meaningful and efficient ways. For example, in error modeling or optimal estimation, can AI-based techniques fill gaps in non- or only partially-deterministic processes?
Essential
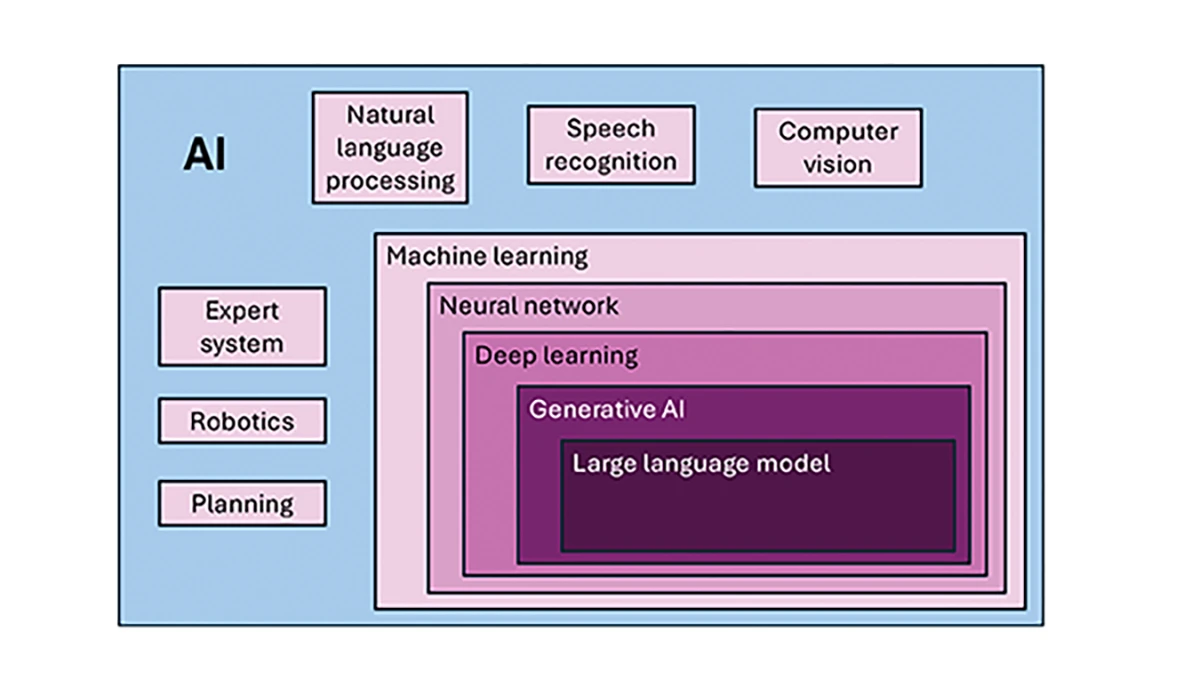
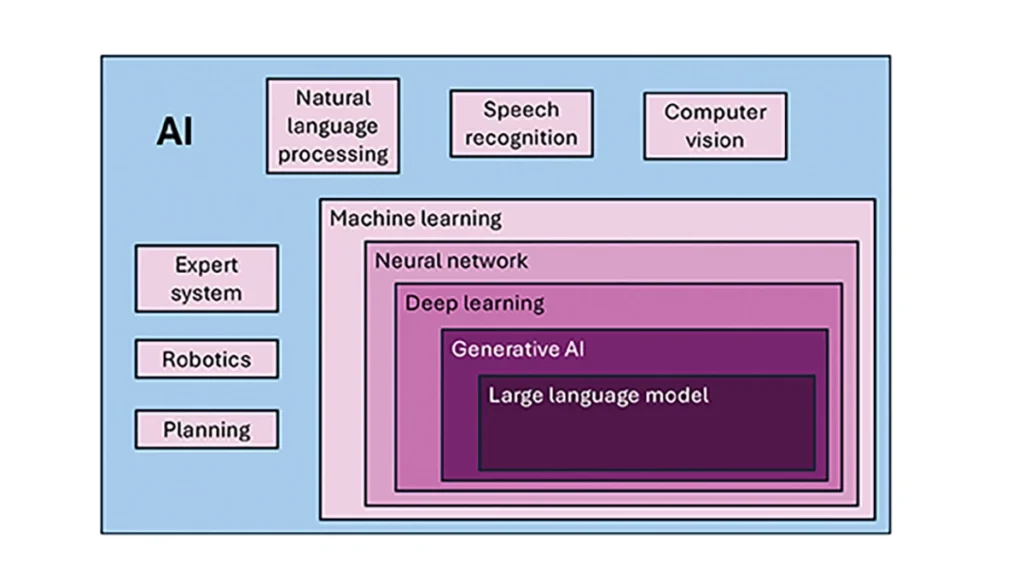
To investigate the current and potential uses of AI in GNSS, it is essential to define its components, especially as some terms are misused or conflated. The presented description is based on a wealth of Internet-based information, including from IBM (2025). Figure 1 illustrates the current broad concepts within, or subsets of, AI based on a synthesis of nomenclature used. In the figure, AI — defined here as a machine that exhibits human-like intelligence — is the superset. Within AI, there are many concepts or subsets that can be categorized, though they can overlap. There is perception intelligence, such as text and space recognition, and there is the broad area of machine learning.
Figure 1: Concepts within/subsets of AI.
Sophisticated processes have been developed and continue to rapidly evolve to give machines the ability to sense, learn and make decisions. Natural language processing (NLP) allows machines to recognize, understand and generate text following human language. Voice recognition is similar, in that the machine transcribes speech to text and back. Computer vision enables machines to interpret and analyze imagery. While robotics is a field of its own, within the superset of AI, it can be seen as an application of AI to motion. Planning refers to autonomously solving planning and scheduling problems. And expert system is the field of AI dedicated to simulating human expertise, judgment and behavior. All of these AI subsets are typically enhanced with machine learning (ML).
ML involves the development of algorithms and statistical models that can infer patterns (i.e., learn) from existing data without explicit instructions (i.e., rote training) and apply this knowledge to new data. Based on the learning approach, there are four types of machine learning algorithms: supervised, semi-supervised, unsupervised and reinforcement. (ML can also be classified by functionality.) Supervised learning uses manually labeled datasets to accurately train algorithms to classify data or predict outcomes. In semi-supervised learning and unsupervised learning, relationships are found with less or no explicit human interaction, respectively. Reinforcement learning combines these approaches with goal optimization. There are many types of ML techniques/algorithms, such as linear regression, logistic regression, decision trees, random forest, support vector machines, k-nearest neighbor and clustering, each designed for different types of problems and data.
Neural networks (NNs) or artificial neural networks are modeled after the human brain. A neural network model contains a given input layer and output layer, each with a set of nodes. These layers and nodes are interconnected with a set of hidden layers of nodes, with each node having a weight and bias, determined (i.e., estimated) based on the specified network inputs and outputs by utilizing one of a selection of optimization techniques. NNs can work well for tasks that involve identifying complex patterns and relationships given large amounts of data, though the details of specific parameter interrelationships cannot necessarily be determined by such models — therefore sometimes referred to as “black box” models. There are several types of neural networks, including convolutional NNs, long short-term memory networks, autoencoders, recurrent NNs, transformers, etc.
Deep learning refers to the depth of layers in a neural network. A deep learning model neural network contains at least three, but typically hundreds of hidden layers. Having many layers allows for unsupervised, fast and accurate identification of complex patterns and relationships. Generative AI can be described as deep learning models that generate new/original content, e.g., text, image or audio data through a variety of training, tuning and generation processes. Finally, large language models can read, understand and generate human language (refer to NLP), making use of all the functionality of ML.
Elements
How machine learning is used in GNSS
So, when should AI be used in GNSS/PNT tasks? A rudimentary answer is whenever AI can perform better (in some specified and measurable sense) than existing methods. The determination of this answer for a particular scenario requires research. From the descriptions of AI and its subsets, GNSS/PNT output is used in myriad AI applications such as sensor fusion, autonomous vehicle navigation, route planning, etc. However, it is primarily the ML subset of AI that is being researched for use in GNSS signal and measurement processing.
ML models can be categorized by their fundamental methodology, as either generative or discriminative, or by the tasks for which they are used: either regression or classification (IBM, 2025). Generative algorithms model the distribution of data points with the goal of predicting the joint probability of a data point appearing in a particular space, whereas discriminative algorithms model the boundaries between classes of data with the goal of predicting the conditional probability of a given data point being in a specific class. Regression models predict continuous values and are mainly used to determine the relationship between one or more independent variables and a dependent variable, whereas classification models predict discrete values and are mainly used to determine a category or class, e.g., binary or multi-class.
Siemuri et al. (2022) provide a comprehensive review of recent research (from 2020 through 2021) in which ML techniques are used in GNSS problem solving and provide a categorization of GNSS use cases. Relevant key findings include: 1) ML is proposed to increase GNSS/ PNT robustness under degraded signal environments; 2) more than 200 studies were assessed; 3) in most cases, the ML approaches outperformed (at varying levels of significance) the traditional GNSS models; and 4) industry adoption of ML in GNSS so far appears limited. The analysis found that neural networks were used in more than half of the studies (55%) — including some deep learning, while support vector machine and decision tree/random forest techniques were used in 19% and 10% of the studies, respectively. Use cases for machine learning in GNSS were categorized as: i) signal acquisition; ii) signal detection and classification; iii) Earth observation and monitoring; iv) navigation and positioning; v) denied environments and indoor navigation; vi) atmospheric effects; vii) spoofing and jamming; viii) GNSS/inertial integration; ix) satellite selection; and x) LEO satellite orbit determination and positioning.
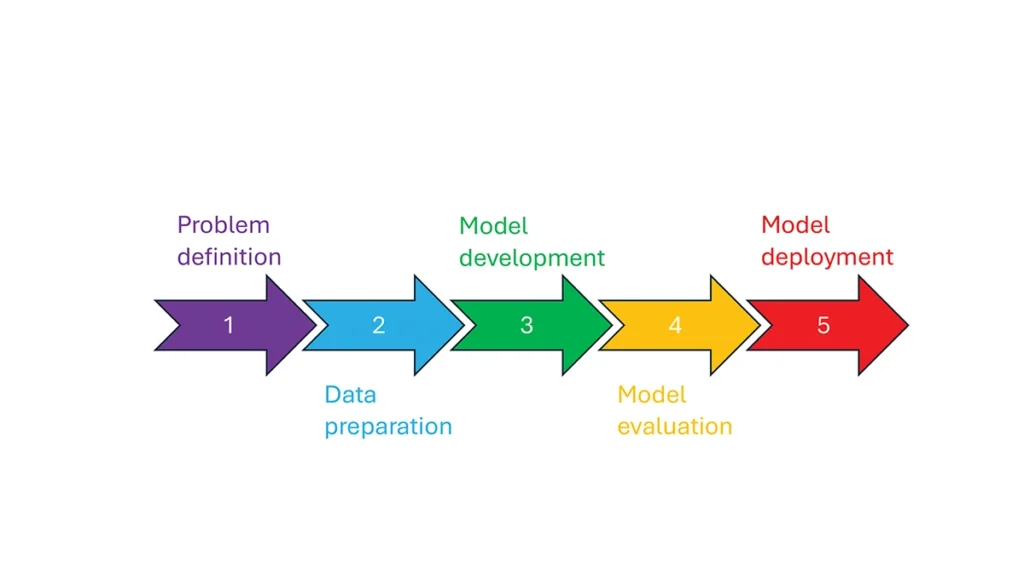
So, how is machine learning used in these GNSS/PNT use cases — and in general? How ML is applied can be described as a set of steps or a cycle with a varying number of components. Figure 2 presents a graphical synthesis from the literature, with a grouping of five core steps.
Step 1 — problem definition: understanding the problem(s) and goals, defining the available data, defining the problem inputs and outputs, determining the category of ML to use and selecting evaluation metrics.
Step 2 — data preparation: collecting the data, editing them, and labeling them if employing supervised classification.
Step 3 — model development: selecting the algorithm, selecting the model, building the model and training the model.
Step 4 — model evaluation: validating the model, tuning the model, analyzing the results, cross-validating the results and applying the evaluation metrics.
Step 5 — model deployment: finalizing the model, applying the model in prediction, and, if necessary, feeding back into the start of the cycle.
Figure 2 Steps in, or cycle of, machine learning implementation.
The scikit-learn (2025) library is a popular resource for Python-based ML information, tools and examples. An illustrative example of how ML can be used in GNSS for signal classification and measurement weighting is given by Li et al. (2023). The authors describe the process for designing the ML problem-solving scenario, selecting the models that are either of the regression or classification type and comparing the performance of many popular ML models to detect direct line-of-sight versus non-line-of-sight and multipath signals in urban environments. Note that most applications of machine learning in GNSS involve some form of supervised classification.
Initial and potential machine learning uses in GNSS
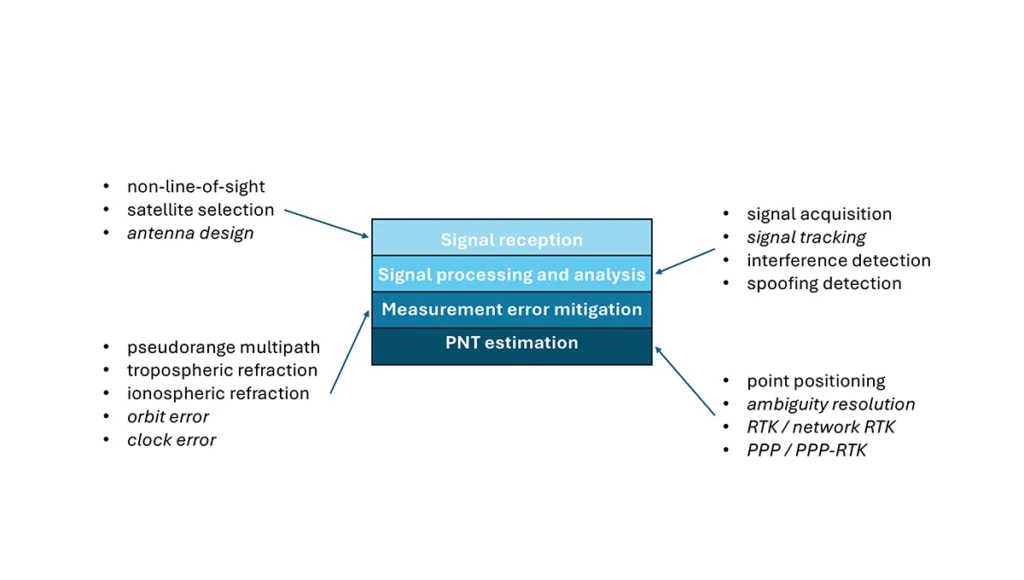
For this column, a brief synopsis is given of the use of machine learning in GNSS in the context of the application themes of signal reception, signal processing, measurement error mitigation and PNT estimation, as illustrated in Figure 3. Correspondingly, potential ML uses are also considered.
Figure 3: Application themes of machine learning in GNSS with initially studied and potential research areas.
Signal reception
Studies including Tsu (2017) and Li et al. (2023) have used various machine learning models to differentiate between line-of-sight, non-line-of-sight and pseudorange multipath GNSS signals in urban environments. Various input features, such as signal strength, are used to train models, resulting in majority accurate classification. ML has been used to optimize satellite selection (rather than using all available tracked satellites) for efficient PNT processing. Radio frequency hardware and software simulators can use ML to improve the realism of propagated signals in various environments and under different dynamics, including multipath, interference and spoofing. There is also the potential for ML to be used to improve antenna design, including for controlled radiation pattern antennas that generate one or multiple nulls.
Signal processing and analysis
Deep learning models have been used for signal acquisition and show improvement over current methods with simulated data (Borhani-Darian et al., 2023). There may be potential for the use of ML in signal tracking or in the design of new tracking algorithms and processes. Studies have shown that ML can be used to detect natural and intentional radio frequency interference. Various ML models have successfully been used to produce accurate classification of radio frequency interference jammer types (e.g., Morales Ferre et al., 2019). ML has also been used to detect signal spoofing with simulated and real signals with high levels of validation (e.g., Semanjski et al., 2020).
Measurement error mitigation
As GNSS multipath is a non-deterministic (and non-zero mean) process, it is a strong candidate for machine learning-based mitigation, especially meter-level pseudorange multipath (compared to centimeter-level carrier-phase multipath). Such studies, combined with non-line-of-sight classification, have been described in the previous section.
Initial investigations of the use of machine learning in the mitigation of tropospheric refraction appear promising (e.g., Łoś, et al., 2020). The wet tropospheric delay on GNSS signals is irregular, making it difficult to predict. Therefore, there is great potential for improved anomaly detection, refraction modeling and more accurate severe weather nowcasting.
As with tropospheric refraction, ionospheric refraction, while well understood, is difficult to model accurately, especially during periods of high solar activity. Machine learning has been shown to accurately detect anomalies and scintillation (e.g., Linty et al., 2018) and potentially for nowcasting.
There is the potential to improve GNSS satellite orbit and clock estimation with ML, as these are both well-defined processes, but also contain levels of process uncertainty. For example, it is usual to include once-per-orbital revolution empirical accelerations in orbit estimation states, and satellite force models can always be improved. Consequently, ML studies may aid in such GNSS network processing to improve the accuracy of real-time and post-processed correction products.
PNT estimation
Well-established optimal estimation techniques such as least-squares and Kalman filtering work extremely well for most GNSS/PNT estimation cases. However, hardware limitations and environmental conditions can lead to measurements not meeting the technical assumptions of these conventional approaches, e.g., the use of independent measurements, the absence of systematic errors, the absence of gross errors, the use of realistic measurement variances, etc. Deep learning models have the potential to improve GNSS point positioning (e.g., Kanhere et al., 2022) in test data, if poor model numerical conditioning, changing satellite visibility and model overfitting are managed. There is potential research in the use of machine learning methods to improve carrier-phase ambiguity resolution, and in the centimeter-level positioning techniques of real-time kinematic (RTK)/network RTK, and precise point positioning (PPP)/PPP-RTK.
Broader AI/ML use within GNSS-based PNT
Clearly, GNSS/PNT outputs are used in a broad spectrum of applications, for which AI and ML are currently being used or have the potential of being used to attain and enhance goals. Machine learning has been used to improve GNSS-derived position time series analysis for many Earth science applications, including in plate tectonics, tsunami monitoring, vulcanology, subsidence monitor, GNSS reference station monitoring, overall measurement integrity, etc. and in diverse GNSS-enabled techniques such as radio occultation and reflectometry (Siemuri et al., 2022).
ML has the potential to allow for improvements in sensor fusion, chief amongst these being GNSS/inertial measurement unit (IMU) integration. Improvements can be found in IMU calibration and in managing functional and dynamic mismodeling for specific user applications. Wider, multi-sensor fusion, such as for simultaneous location and mapping solutions, rely heavily on ML approaches, such as reinforcement learning.
Finally, GNSS-based PNT is used in most of the non-ML subsets of AI. GNSS-based position information is central to many outdoor robotics, planning and computer vision algorithms, providing either seeding localization information for other sensors or processes, or core position information for the overall AI-driven system.
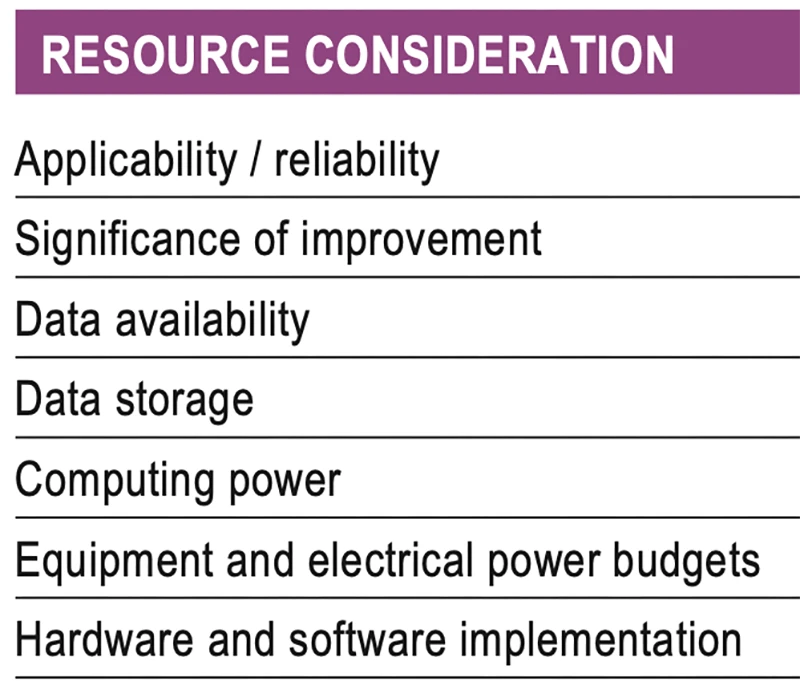
Machine learning resource considerations
As with all technology, a cost/benefit analysis is required when considering the application of ML in a specific GNSS use case. Table 1 summarizes the broad considerations. Can the problem at hand be reliability mitigated with ML, in the sense that there are complexities that are difficult or impossible to physically model, but sufficient patterns in the data to be modeled by ML? If ML can outperform a conventional approach using specified metrics, is the improvement significant to the user? Are there large enough, i.e., sufficient and varied, datasets to train a model for prediction over expected data variations? As most ML algorithms require large amounts of computing storage for large datasets, typically from data servers, can the necessary computing power be brought to bear? Similarly, given that most ML algorithms require large amounts of computing power for myriad computational operations, typically utilizing graphics processing units (GPUs), is such computing power available? As storage servers for large datasets and GPUs for processing are expensive and require large amounts of electrical power, are the financial and electrical power, environmental and security resources available? And finally, how practical is it to implement the ML model on user equipment or via servers?
Table 1 Resource considerations for machine learning use in GNSS.
Evolutionary
AI is a broad field that is rapidly developing and entering service in most technologies. While AI includes many subsets such as computer vision, natural language processing and robotics, the ML subset (which includes neural networks, deep learning and generative AI) has the most direct applicability to GNSS/PNT. Of the available ML models used in GNSS, most are supervised (i.e., they use labeled training data), and the majority use neural networks. Initial studies of applications such as signal classification and interference detection indicate that supervised ML models perform better than traditional approaches.
Many subsets of AI, such as computer vision and robotics, rely heavily on ML, while GNSS/PNT has only recently seen investigations in ML use. For many applications, it can be that conventional deterministic models, physics-based models or optimal estimation techniques work well and reach desired performance standards. However, as GNSS/PNT continues to trend to lower cost hardware, harsher environmental conditions and increasing safety-of-life usage, PNT outliers and corner cases grow in importance, and ML can potentially provide solutions, as outlined in Figure 3. These are the early days of investigating and applying ML in GNSS/PNT. To use ML or not to use ML — that is the question. There are many factors to consider, as described in Table 1. Performance improvements over current approaches and operational practicality (i.e., costs) will dictate ML adoption. Much more research is required in many GNSS/PNT applications, followed by significant wide-spread testing and tuning of developed ML models. It is difficult not to predict the near-term adoption of ML in at least some GNSS/PNT use cases, if they will benefit our daily lives. Look for future columns that will examine and investigate ML implementations in specific GNSS/PNT applications that prove its efficacy.
Question: What are the main challenges facing GNSS/GPS-based autonomous solutions in terms of signal integrity, jamming and spoofing, and how are these being addressed?
Answer: Outside of the military, interference is the most common threat to GNSS, with the dominant source being cellular transmission harmonics. It is commonly addressed with out-of-band filters. Non-terrestrial networks (NTN), like Global Star uplink at 1.6 GHz, are gaining traction in more mobile and wearable devices to fill gaps in cellular availability. However, it can create coexistence issues for devices for concurrent L1 GNSS reception during NTN uplink.
In military cases, while intentional interference is effective, the increasing number of GNSS bands to cover requires more transmission power. Modernized GNSS signals with wider bandwidth signals require more jamming power, which risks detection by radiofrequency emission satellite systems such as Hawkeye 360. The frequency of spoofing events will likely continue to increase and spill over into civilian domains.
Thanks to the increasing number of test ranges being made available to commercial GNSS developers, anti-spoofing technology is making some gains, at least in the high-end systems used for autonomous GNSS.
Q: What are the most impactful use cases and sectors benefiting from recent advancements in autonomous solutions?
A: Ride sharing and transport are the likely winners in exploiting the cost savings of driverless systems with autonomous navigation. The past 15 years’ investments in the development of augmented navigation systems — mainly lidar and vision-based — are finally paying off as we see Waymo in service, and soon Uber and Tesla in commercial deployments. Still, these systems depend solely on GNSS as the absolute positioning system, used for navigation in non-urban environments, but also fallback in certain cases where the sensors are problematic, as well as system calibration.
Agriculture, being one of the first segments to exploit autonomous solutions, can still see incremental gains as GNSS corrections systems move RTK from local to regional, allowing some monthly service margin improvements. High-precision consumer products like robotic lawn mowers will be enabled with similar infrastructure. Data services are a key part of infrastructure, for communication as well as precision navigation enablement. Companies such as Swift Navigation, Point One Navigation and RxN networks are expanding their networks and competing with the likes of Trimble and Hexagon.
In partnership with the European Space Agency (ESA), EnSilica, a maker of mixed-signal application-specific integrated circuits, will design and develop a key silicon component to enable resilient multi-band global navigation satellite system (GNSS) capabilities. These are vital to ensuring the world’s critical infrastructure and services remain robust and secure in the face of evolving global threats, according to the company.
The ESA NAVISP Element 2 program helps to increase the competitiveness of participating European states in the global market for satellite navigation and enables these countries to be positioned to capitalize on emerging market opportunities across positioning, navigation and timing (PNT) technologies and services.
“As we and our infrastructure become ever more dependent on PNT services in everyday life, it is important to have highly integrated, resilient and precise technology sourced in Europe and the UK,” said Paul Morris, vice president of RF and communications business unit at EnSilica. “This collaboration will allow us to accelerate such technology, starting with a next-generation radio design enabling our partners to focus on integrating their custom algorithms.”
EnSilica has a growing satellite communications market footprint and is working with support from ESA and the UK Space Agency (UKSA), with the latter organization awarding the company £10.38 million ($12.8 million) in February 2025 for a development project under its Connectivity in Low-Earth Orbit program. Part of the company’s expertise is in architecting and implementing systems-on-chip with high-performance RF, including mmWave, and complex baseband processing.
Ian Lankshear, CEO of EnSilica, added, “I am extremely proud of our team to have been secured this agreement under the ESA NAVISP Element 2. This project will enable us to further enhance GNSS technology and continue to develop commercial solutions that are critical for resilient and reliable satellite navigation. We are grateful for the ongoing support from ESA and the UKSA, and we continue to focus on PNT and the broader satellite communications market as a key growth driver of our business.”
GNSS researchers presented hundreds of papers at the 2023 Institute of Navigation (ION) GNSS+ conference, which took place Sept. 11-15, 2023, in Denver, Colo., and virtually.
The following four papers focused on ways to combat GNSS jamming and spoofing. The papers are available here.
GPS World will attend this year’s ION conference in Baltimore, Maryland on Sept. 16-20.
Approximating Regional GNSS Interference Sources Using ADS-B Data
The Automatic Dependent Surveillance-Broadcast (ADS-B) system, widely used for air traffic operations and management, also has potential applications in identifying, detecting and localizing (IDL) GNSS/RFI jamming sources in regions with high air traffic. With the rise in global GNSS interference reports, it is crucial to identify and eliminate jammers to ensure safe air travel operations.
The Navigational Integrity Category (NIC) value included in the ADS-B message is a key indicator for detecting potential jamming from ADS-B data. Although NIC is not the most effective metric for interference detection, it can still signal the presence of jamming and offer a means to localize the source in real time.
This research aims to approximate the area of GNSS/RFI interference by fitting a Euclidean Cone to ADS-B data that reports low NIC values. The problem is formulated as a convex optimization problem, derived from an alternative version of the maximum inscribed ellipsoid approach. By fitting an optimal cone to the data affected by interference, the cone’s apex indicates the estimated jamming location. The research team processed, decoded, interpolated and filtered ADS-B data to enhance localization accuracy.
The proposed convex formulation was tested on two reported interference events: one near Denver International Airport in January 2022, for 36 hours, and another near the Dallas-Fort Worth area in October 2022, over roughly eight hours. In Denver, four estimated jamming locations, calculated from four six-hour time windows, were grouped between downtown Denver and the airport. In Dallas, three estimated jamming locations, determined from three one-hour windows, showed a tighter grouping on the southern side of the Dallas/Fort Worth area, indicating spoofing was nearby.
Michael Dacus, Zixi Liu, Sherman Lo and Todd Walter, “Approximating Regional GNSS Interference Sources as a Convex Optimization Problem Using ADS-B Data.”
Hybrid Autoencoder for Interference Detection
Malfunctions or failures in GNSS services can result in significant personal, material, and financial damages. Early identification of anomalous behavior in GNSS signals can enable timely countermeasures. However, many interference monitoring or mitigation techniques are only feasible with high-end receivers and demand a certain level of expertise to be used effectively.
This paper presents a GNSS interference monitoring approach employing machine learning methodologies for users of any expertise level and with any type of GNSS receiver capable of outputting raw GNSS observations. The research team used simple signal-to-noise ratio (SNR) observations and different hybrid autoencoder models, including denoising or variational autoencoder combined with recurrent neural network (RNN) models, which are trained and tested on real jamming and spoofing events. The developed monitoring system is represented by a “traffic lights” system, indicating the severity or level of concern associated with each detected anomaly.
The results compare different RNN-based autoencoder implementations and have been tested on input data from high-end to low-end GNSS receivers. The analysis of the test set showed that there is a 95 percent probability of catching anomalies. Additionally, similar results were achieved when applied to other geodetic receiver types such as u-blox or JAVAD GNSS receivers. However, smartphone data is subject to some limitations. Notably, missed anomalies are primarily attributed to the low transmitting power from the jamming and spoofing devices, which poses challenges for detection.
Karin Mascher, Stefan Laller and Philipp Berglez, “Hybrid Autoencoder for Interference Detection in Raw GNSS Observations.”
A Tool to Monitor, Analyze and Record Navigation Signals
Given the heavy reliance on GNSS for numerous critical applications, any disruption caused by intentional or unintentional RFI could pose significant threats to operations that depend on these systems, from transportation and logistics to emergency services and national security. Developing advanced countermeasures against RFI has become a priority to ensure the functionality and resilience of GNSS-dependent systems.
This paper presents an architecture for real-time detection and classification of RFI affecting multi-band GNSS signals based on a machine learning method. The study proposes an architecture combining an actual GNSS monitoring station for recording GNSS signals — a Navigation Signals Monitoring, Analysis, and Recording Tool (N-SMART) system — with a deep neural network approach to detect and classify different classes of interferences.
Researchers propose a novel architecture for real-time interference detection and classification of RFI, which can continuously monitor and record multi-band GNSS signals and provide timely warnings in case of RFI. The proposed architecture utilizes the N-SMART system to capture and store the GNSS signals, while detection and classification are implemented using a deep neural network technique. The core principle of the suggested method is to implement a convolutional neural network (CNN) classifier inside a Docker container, running on top of the N-SMART system.
The results of the experimental test campaign on real interfered GNSS signals showed an overall accuracy of 85 percent, demonstrating the potential for effective, real-time classification of RFIs in GNSS. The research team explains that future work could focus on optimizing the model or exploring new architectures of CNN to improve accuracy and reduce task completion time across a variety of applications.
Iman Ebrahimi Mehr, Alex Minetto and Fabio Dovis, “A Navigation Signals Monitoring, Analysis and Recording Tool: Application to Real-Time Interference Detection and Classification.”
GNSS RFI Mitigation in Commercial Airborne Receivers
Reports from air navigation service providers worldwide indicate that commercial airborne GNSS receivers are increasingly being subjected to jamming and spoofing attacks. Consequently, there is a growing need to ensure that the raw GNSS measurements provided to aircraft systems are not compromised by spoofing. Validating these measurements is critical to maintaining the integrity and reliability of navigation systems used in aviation.
This paper focuses on two techniques under development by Collins Aerospace to be incorporated via a field-loadable software update to the Collins GLU-2100 multi-mode receiver to combat spoofing attacks. The first method, Receiver Autonomous Signal Authentication (RASA), uses the known characteristics of the GNSS receiver oscillator to detect whether the received signals are from a spoofer.
A second technique, Staggered Examination of Non-Trusted Receiver Information (SENTRI), uses the inertial sensor data already available from the aircraft’s IRS/INS, to monitor the coherence between pure GNSS, pure inertial (INS) navigation solutions or tightly coupled inertial GNSS hybrid solutions without augmentation. SENTRI further allows the computation of position integrity levels (HPL and VPL) in the presence of GNSS spoofers. The paper will describe the overall RFI mitigation architecture that is implemented on the GLU-2100.
RASA and SENTRI can be used together in a complementary fashion to detect the presence of spoofers reliably. It will also provide improved robustness to data spoofing attacks that induce errors in ephemeris, almanacs, GPS time jumps, etc., and will enable the GLU-2100 to coast through GNSS outages that are induced due to spoofing or jamming.
Future technologies will use antenna techniques, signal analysis, DFMC signals and APNT to increase the robustness to new and evolving threats. The goal of this RFI mitigation roadmap is to continue to ensure that GNSS can be used safely and reliably in civil aviation.
Angelo Joseph, Joseph Griggs, Patrick Bartolone, Bernard Schnaufer, Huan Phan, Vikram Malhotra, “GNSS Radio Frequency Interference Mitigation in Collins Commercial Airborne Receivers.”
In one way or another, GNSS is constantly in the news, even though it rarely makes the headlines. Three recent articles prove this point.
Matteo Luccio
The article “Starburst” in the March 4 issue of The New Yorker, written by staff writer Kathryn Schulz, details how the next big solar storm could devastate the U.S. power grid and communication systems and questions whether we are prepared for it. Schulz focuses repeatedly on the key role of GNSS and how devastating it would be if their signals were disrupted by a solar storm. She points out that a large solar storm has not occurred since widespread electrification, let alone in the digital age, and that some scientists now believe there is an approximately 12% chance of an extreme geomagnetic storm striking Earth in the next decade. “The Army,” Schulz wrote, “concerned about overreliance on vulnerable technologies, has reinstated courses in orienteering, and the Navy has resumed teaching sailors how to use a sextant.”
A March 12 article in WISPOLITICS — which bills itself as “Wisconsin’s Premier Political News Service” — reports on a letter from the chairman of the U.S. House Select Committee on the Strategic Competition between the United States and the Chinese Communist Party, Mike Gallagher, to Federal Communications Commission (FCC) Chairwoman Jessica Rosenworcel. Following reports that U.S. cell phones and other devices are receiving and processing signals from Chinese and Russian GNSS satellites, Gallagher asked Rosenworcel whether it is “contrary to FCC rules for handsets and other devices to receive and process signals from unauthorized GNSS constellations.” I have long wondered the same thing. If any of you readers has a firm understanding of this issue, please let me know. Gallagher also asked whether it is “the responsibility of component vendors, device makers, or carriers to ensure that such signals are not received and processed by devices that use GNSS” and whether the FCC has taken any enforcement actions on this matter.
A March 14 article by Elliot Ackerman and James Stavridis in The Wall Street Journal warns that, as its headline says, “Drone Swarms Are About to Change the Balance of Military Power.” Ackerman, a Marine veteran, is the author of numerous books and a senior fellow at Yale’s Jackson School of Global Affairs. Admiral Stavridis, U.S. Navy (ret.), was the 16th Supreme Allied Commander of the North Atlantic Treaty Organization (NATO) and is a partner at the Carlyle Group. “Drones have become suddenly ubiquitous on the battlefield — but we are only at the dawn of this new age in warfare,” they wrote. “[D]ozens or hundreds of drones in AI-directed swarms will have the capacity to overwhelm defenses and destroy even advanced platforms. Nations that depend on large, expensive systems like aircraft carriers, stealth aircraft or even battle tanks could find themselves vulnerable against an adversary who deploys a variety of low-cost, easily-dispersed and long-range unmanned weapons.” While the article focuses on AI and does not mention GNSS, the latter is a key enabling technology for UAVs, as readers of this magazine know well.
Current state of the art multi-frequency GNSS receivers operate by receiving L1 first and then L5. L5-first is a viable answer to the call for more resilience in GNSS as is being discussed in government and technical circles to protect vital national infrastructure. It is suggested as part of “Toughening Category 4: Signal Alternatives” to protect, toughen and augment (PTA) the current GNSS systems described by Brad Parkinson’s article in the March 2022 issue of GPS World.
Paul McBurney
The need arises from attacks directed by bad actors on a large scale, such as electronic warfare, and on a more humane scale, by bad actors such as self-jammers and spoofers. On top of that, normal interference can cause desensitization and denial of service on GNSS receivers from myriad terrestrial and satellite communications.
The PTA plan presents the Denial Radius Reduction Ratio (DRRR) figure of merit and shows that a J/S increase of 15 dB produces a DRRR of 0.18. Whereas a receiver without this additional 15 dB of J/S could be denied fixing out to 1 km from a given transmitter, a receiver with an additional 15 dB J/S would be denied out to only 180 m from the same transmitter.
The improvement in terms of area is proportional to radius squared. The article identifies that the J/S capability is different among GNSS signals and the best performance is obtained with L5, mainly because it has the highest chipping rate. L1C has a code length of 10,230 chips, the same as L5, but it is spread over 10 msec and has the same chipping rate as L1 C/A.
There are currently 72 L5 signals between GPS, Galileo, BeiDou and QZSS transmitting the same physical layer features of 10.23 MHz chipping rate, 1 kHz overlay codes and higher transmit power compared to nearly all L1 signals with a 1.023 MHz chipping rate and lower transmit power. The combination of these features at L5 is close to achieving this 15 dB performance level over L1.
Unlike current hybrid receivers, L5-first survives L1 jamming. (Photo: Carkhe / iStock / Getty Images Plus / Getty Images)
One might conclude that the current start of the art of a receiver with both frequencies (aka, a hybrid L1+L5) has this resilience. However, the market does not currently offer the ability to directly acquire L5 signals overall use cases of GNSS assistance without first acquiring signals at L1. This means they can only achieve this resilience when the interference is encountered after acquiring and fixing at L1. As soon as the L1 is lost and the position and time uncertainty grow beyond the receiver’s capacity to autonomously search for L5 signals, the receiver is denied service at the interference level tolerable at L1. If you cut the receiver into L1 and L5 pieces, only the L1 side is capable of fixing autonomously. As noted by Dennis Akos et al. (“Testing COTS GNSS Receivers Using Only a Subset of Supported Signals,” ION JNC 2023), “support for several signals/frequencies provides integrity and robustness.” Specifically, “under jamming scenarios, signal diversity can allow a receiver to still generate an accurate position solution.”
Current receivers are not able to acquire L5 for reasons related to history, cost and power consumption. Historically, the promise of L5 accuracy was so attractive that it was added to legacy chipsets based on L1 even when it was only partially deployed. It was impractical at that time to require L5 acquisition when there were fewer L5 satellites than at L1. Cost and power are related to the fact that L1 receivers’ acquisition methods are sized to acquire the L1, E1, B1 and G1 signals. Memory and compute capacities, including the digital clock speed, are sized for slower chipping rates and hence shorter code lengths. At this performance level, conventional time domain correlation is adequate. Some receivers deploy frequency domain methods at L1 and achieve a lower cost and power than time domain methods with similar capacity. However, the L5 acquisition complexity with time domain correlation is 100 times more than L1 as its complexity increases with N2, meaning the cost and power to acquire L5 is out of reach. While using a time domain acquisition engine to acquire L5 may be possible for strong signals when the code and frequency search space is constrained for those signals, directly acquiring L5 with conventional methods would have serious shortcomings in many use cases.
Interestingly, the signal designers across all GNSS systems have cleverly designed the L5 signals so they can be easily acquired after acquiring their counterparts on L1. The L5 primary and secondary code is predictable based on learning the L1 primary code and navigation data bit phase. E5a and B2a primary and secondary codes can be predicted by learning the well-designed E1/B1 primary and secondary code phases that have the same total period: the combination of the 4 msec code lengths synchronous with 25 bits of secondary code are in phase with the E5a 100 msec overlay code. After an L1 fix with fine time, L5 can similarly be directly acquired easily with limited searching.
Surveyors for architecture, engineering, and construction projects require GNSS receivers that have high accuracy and are rugged enough to survive the dust, water, and inevitable drops that they will endure at construction sites. They also need to be able to easily share data with architects, engineers, planners, and tradespeople, both at the sites and at the office.
Photo: Juniper Systems
Juniper Systems, which has more than 30 years of experience in mapping and data collection in a wide variety of applications across industries, recently released a real time-kinematics (RTK) activation for its Geode GNSS receiver that allows mapping accuracy down to a centimeter. Pairing a Geode with the company’s Uinta mapping and data collection software and a Mesa rugged tablet makes it easy for users to share their data — such as the locations of fiberoptic telecommunication lines or of utility manhole covers — with other people working on site or at the office. The Geode and the Mesa meet IP68 protection certification for water and dust ingress; they also have MIL-STD-810G certification against drops, vibration, and extreme temperatures.
In this month’s cover image, the Geode is at the top of the survey pole, the Mesa Rugged Tablet is mounted near the user’s hand, and the screen on the Mesa depicts the Uinta mapping software.
On construction sites, surveying is an ongoing process. Surveyors are the first on the site, before any other work begins, and the last ones there, to map the project “as built.” Total stations with GNSS receivers, as well as tablets and other mobile digital devices are their essential tools, increasingly complemented by unmanned aerial vehicles (UAV) and lidar scanners. Accuracy is their key contribution. In this month’s cover story on GNSS for architecture, engineering, and construction (AEC), we highlight three building projects: a skyscraper in Sweden, a highway in China, and a luxury resort in the Caribbean.
Check out these perspectives on architecture, engineering and construction: