Sometimes hands-on data collection just isn’t good enough. In the busy Shizuoka harbor, Weichao Liu of CHC Navigation used the company’s Apache6 marine drone to take a bathymetric survey of a channel in preparation for dredging at a Shizuoka seaport. The Apache6 also collected 3D lidar data above the water’s surface.
In May, CHC Navigation launched the 2020 Edition of the Apache6 USV (unmanned surface vessel), which combines a dual GNSS positioning and heading receiver, stable and reliable hull attitude sensors, and an inertial measurement unit (IMU). The CHCNAV GNSS/INS control box maintains high accuracy during transient GNSS outage, according to CHC Navigation, such as providing uninterrupted surveying while passing under bridges.
Just like an aerial drone, the Apache6 has an auto return feature, and like it’s much larger manned brothers, it uses sonic radar (sonar) to avoid obstacles. Its fully autonomous survey mode is powered by CHCNAV absolute straight line technology so that the craft follows a predetermined path even in adverse current conditions.
Besides 3D bathymetric surveys, the USV has been used for positioning of underwater objects, offshore construction, underwater archaeology and wreck salvage. It is equipped with a high-performance single-beam echosounder, and can be installed with lidar to create a combined marine and terrestrial 3D high-accuracy survey in a single pass, such as for harbor and river surveys with height clearance evaluation.
Feature image: Weichao Liu, a member of CHC Navigation’s technical support staff, prepares to launch an Apache6 unmanned surface vessel, also known as a marine drone. (Photo: CHC Navigation)
Over the years, contractors involved in underwater excavation projects — dredging, pond/lake expansions, creation of boat landings, waterfront cleanups, etc. — have become some of the most ardent supporters of GNSS-based solutions. They’ve found that the ability to “see” beneath the surface with their machines has proven invaluable in improving efficiency and minimizing the risk of over/under cutting.
The Minnesota Department of Natural Resources (DNR) led the effort to remediate a section of the St. Louis River on Duluth’s waterfront. Midwest Amphibious Equipment (MAE) tackled the huge restoration project, equipping two of its amphibious excavators with Topcon HiPer VR, an FC-5000 field controller and an X-53i system.
MAE began digging out vast amounts of wood waste that had rested at the bottom of the river for more than a century, when sawmills lined the waterfront. By removing the wood waste and building a small island in the Grassy Point area, the DNR hopes to restore the damaged habitat.
The murky water required a precise method of measuring the cuts as debris was removed. “The Topcon solution lets my guys know exactly where the bucket is in relation to the plan provided by the engineers,” said MAE CEO Steve Gilbertson. “There is no guesswork; it is dead-on every time, with tolerances to 1/10 of a foot — far closer than we need it to be.”
Topcon’s SiteLink 3D provides a point-to-point communications solution. “With the click of a button I can do everything from verifying a machine’s position to sending the as-built back to the office to looking at their screen to answer a question the operator might have about the project itself,” Gilbertson said. “We’ve only scratched the surface of what can be done with SiteLink, but it’s still proving a really nice addition to our operation.”
Less than halfway into the project, MAE had removed more than 100,000 cubic yards of material.
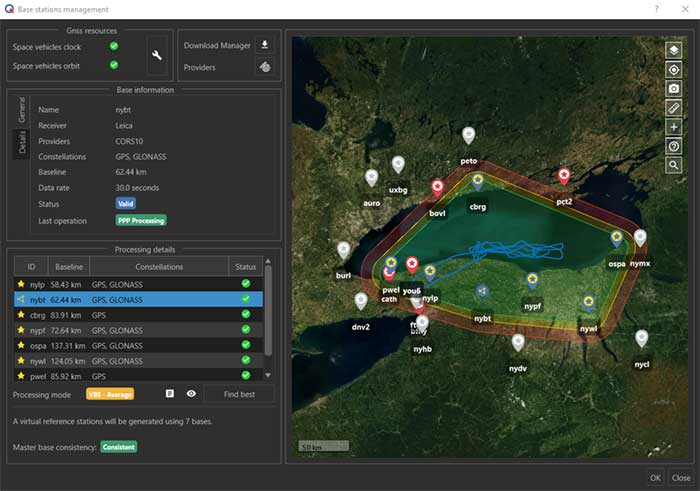
The virtual base station feature in SBG’s Qinertia computes a virtual network around a project in which position accuracy is maximized, homogeneous and robust, the company said. (Photo: SBG Systems)
SBG Systems has released a virtual base station (VBS) feature in Qinertia, its in-house GNSS and inertial navigation system (INS) post-processing software. According to the company, trajectory and orientation are greatly improved by processing inertial data and raw GNSS observables in forward and backward directions.
The VBS computes a virtual network around a project in which position accuracy is maximized, homogeneous and robust like a PPK short baseline, SBG said. Once surveyors collect data, Qinertia chooses the most relevant reference stations, builds a virtual network and brings the project to the centimetric accuracy with no jump on accuracy nor convergence effects, even in urban areas.
According to SBG, it has worked to offer a VBS which takes the most out of any GNSS receivers from different brands and models — with different configurations or constellations — and even with different coordinate systems. Qinertia automatically adjusts the VBS network to compensate for any base station position inaccuracy and provides full quality control indicators to assess the expected accuracy and reliability, the company added. Qinertia VBS technology can mix users base stations with permanent network base stations to improve accuracy in remote locations.
Finally, Qinertia automatically selects the best positioning technology that applies to a user’s project, whether it is a single base station mode, the virtual base stations mode or a precise point positioning computation. Despite this, users can still take control and make adjustments — like — while Qinertia automatically re-checks and re-computes all parameters simultaneously to validate the accuracy and consistency.
Feature image: Smithsonian; Charlie Trimble provides the 4000A GPS Locator to the Smithsonian Museum. Introduced in 1984, the Trimble 4000A was the first commercial GPS positioning product.
Aceinna, a developer of inertial-based guidance and navigation systems for autonomous vehicles and devices, has partnered with Point One Navigation, which delivers precise positioning for the next generation of transportation.
According to the companies, the partnership enables a streamlined positioning platform that combines Point One’s Polaris GNSS cloud correction service with Aceinna’s OpenRTK330 hardware and software solution for developers in agriculture, construction, mapping, surveying, robotics and trucking.
OpenRTK330, designed for use in Level 3 ADAS and other high-volume applications requiring precise position information, is a GNSS receiver with a built-in RTK engine and triple redundant inertial sensors. According to Aceinna, it includes a multi-band RTK/GNSS receiver coupled with redundant inertial sensor arrays to provide centimeter-level accuracy, enhanced reliability and superior performance during GNSS outages. OpenRTK300 is supported by Aceinna’s open-source tool chain.
Through backend server synchronization between the companies, activation and authentication will be streamlined. In addition, true centimeter-level accuracy will be attainable and powered by the integration of Point One’s coast-to-coast Polaris network and Aceinna’s OpenRTK platform, the companies said.
“This partnership between Aceinna and Point One harnesses and combines each of our distinct strengths, to offer a solution platform that makes high performance positioning accessible to a variety of industries and applications,” said Yang Zhao, chairman and CEO of Aceinna. “We are thrilled to work with Point One’s technical expertise and execution to advance this technology to the next level of precision.”
The combined offering will be available for purchase beginning December 2020.
Aceinna is headquartered in Andover, Massachusetts, and Point One Navigation is headquartered in San Francisco.
Flight simulators range in price from free to tens of millions of dollars and in purpose from pure entertainment to serious business — such as learning to fly multi-million-dollar aircraft without crashing them in real life and getting anyone killed. Military and commercial pilots spend thousands of hours in simulators learning both routine operations and how to deal with emergency situations. They can become fully proficient through immersive training in these virtual environments. The U.S. Army, Air Force, Navy and Marines all use flight simulators to train pilots to fly in battle, recover in an emergency, and coordinate air support with ground operations. To do this, they use hardware and software developed both by military agencies and by commercial military contractors.
In high-end flight simulators, the trainee steps into a life-size replica of a cockpit, whereas others consist of several monitors that cover the trainee’s field of view, or, at the lowest end, everything is crammed onto a single monitor. All flight simulators, however, are designed to replicate as closely as possible the layout and controls of a real aircraft. (Ironically, the $120 Microsoft Flight Simulator Premium Deluxe Edition lets you fly 35 different planes, while flight simulators that cost tens of millions of dollars are limited to a few models because they have to physically replicate the cockpit layout, which varies from aircraft to aircraft. Some training centers invest in multiple simulators, while others privilege convenience over accuracy and use a single simulator model.)
Most professional flight simulators sit on top of either an electronically-controlled motion base or a hydraulic lift system that rotates the replica cockpit in three dimensions in reaction to both user input and simulated events. This provides trainees with haptic feedback, in other words, feedback they can feel. (Another example of a device that provides haptic feedback is a joystick with force feedback.)
Like when learning to sail offshore or to survive in the wilderness, a large component of any pilot training program is navigation. For flight simulators, this involves detailed aeronautical charts, huge amounts of Earth observation imagery including thousands of airports, and faithful replicas of several cockpit navigation instruments. While aviation programs provide standard training to ensure pilots can handle situations ranging from enemy fighters to bird strikes to engine failure, they may overlook the importance of duplicating actual cockpit instruments rather than relying on facsimile ones.
Simulating GNSS signals
This is where GNSS simulators come into play. They make it possible “to simulate the actual GPS signal required by the cockpit navigation instruments,” according to a case study by Orolia.
This approach, the company points out, offers advantages to both the trainees who use flight simulators and the engineers who develop them. For a trainee, “the advantage is that he is trained using the identical instruments as those in the actual airplane […] providing the same feedback as a real-world experience.” For an engineer developing a flight simulator, GNSS simulators make it possible to “design more effective flight simulation programs without compromising quality.”
Furthermore, “using real navigation instruments may […] reveal unexpected behavior from the instrument, which helps the pilot to be prepared for this possibility. If any conditions involving the plane dynamics are not properly handled by the navigation unit, the pilot can obtain actual feedback from real navigation instruments, which could differ from feedback provided by a facsimile instrument.”
Hardware-in-the-loop (HWIL) techniques enable Orolia to integrate its simulator in a flight simulator to reproduce the GPS/GNSS dynamics for the airplane in real time. “Because the pilot steers the aircraft in real time, the GPS simulator must also simulate GPS signals in real time, forming an HWIL integration,” the company said. “This integration enables the flight simulator to integrate the actual navigation unit to provide a very realistic environment for the trainee.”
Racelogic, another manufacturer of GNSS simulators, is launching a new RealTime LabSat that can connect to Microsoft Flight Simulator, including the new 2020 version. “This will create a live GNSS RF feed that accurately follows the trajectory in the simulator, enabling the testing of any GNSS device as though it were being flown on the aircraft,” said Julian Thomas, the company’s managing director. “To help make this a cost-effective solution, we have recently optimized our SatGen signal simulation software so that a real-time simulation such as this can be carried out on an entry-level PC with a full constellation of simulated satellites.”
The GNSS and flight simulation industries overlap even further. For example, Garmin, which manufactures consumer GPS receivers, makes the avionics used in some professional flight simulators.
Simulator demand on the rise
The utility of simulators is not limited to training human pilots and drivers. The demand for simulation is being sharply increased by the development of autonomous vehicles of every kind — from self-driving cars to unmanned aerial vehicles (UAV), from bathymetric vessels to urban air mobility (UAM) aircraft.
For example, manufacturers of self-driving cars need to simulate driving millions of miles, in all kinds of traffic and weather conditions, to perfect their vehicles’ algorithms. The result of all these simulations is better trained human and robotic pilots and drivers prepared for real situations, superior mission readiness, and maximum safety for both military and civilian operations on land, at sea and in the air.
Feature image: In a simulated G1000 NXi integrated flight deck for a King Air 350, a pilot refers to the Garmin Pilot app, used as a supplement during flight. (Photo: Garmin)
The number of GNSS constellations, satellites and signals is constantly growing. The threats to GNSS — from unintentional radio frequency interference (RFI), jamming, spoofing, multipath… and Federal Communications Commission rulings — are increasing, as are the public’s expectations of GNSS accuracy.
All these factors contribute to the need for ever more powerful and advanced simulators that can realistically simulate a wide range of optimal and suboptimal environments. That is why simulators are a rapidly growing sector of the GNSS industry.
At present, the main defense against jamming are continuous radiation pattern antennas (CRPA). Therefore, it is essential that simulators be able to accurately reproduce signals from CRPAs. They are even more useful when they can generate M-code (MNSA) signals, which not all simulators do.
Additionally, the development of autonomous vehicles requires engineers to simulate driving millions of miles, under a variety of environmental and traffic circumstances. To accomplish this in a reasonable amount of time requires them to run simulations faster than in real time, or run many simulations in parallel.
Finally, there is an increasing need to simulate alternative positioning, navigation and timing (PNT) signals being developed as supplements to and substitutes for GNSS signals in circumstances that make the latter unavailable or unreliable.
These are some of the challenges facing manufacturers of GNSS simulators. What follows are their brief descriptions of the approaches they are taking and the innovations they are introducing.
What is your most recent innovation?
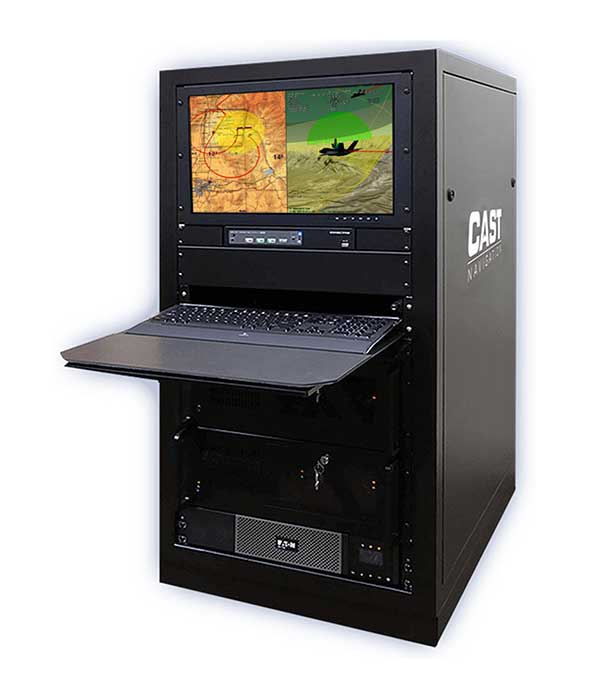
Our latest simulator innovations contain wave-front generation signal technology, which allows you to generate GNSS and interference signals that represent the received signals for each antenna element in a phased array antenna manifold, usually referred to as a controlled radiation pattern antenna (CRPA). Our modular design approach enables users to simulate IMU data commensurate with the wave-front signals for a complete coherent GNSS/IMU simulation that is ideal for stimulating receivers that contain CRPA and IMU capabilities. Our simulators also contain proprietary synchronization technology that allows users to synchronize multiple systems to produce a “wave-front” of GNSS and IMU signals for multiple vehicles, or even an entire fleet.
Photo: CAST Navigation
What is your approach to jamming and spoofing?
CAST Navigations’ family of GNSS simulators are capable of realistically simulating a wide range of suboptimal conditions—such as jamming/spoofing, multipath, RF interference and satellite constellation perturbations—for virtually any commercial or military environment. Our interference signals or “jammers” can be located at any terrestrial location and can be static or dynamic in nature. A distinguishing feature of CAST Navigations’ simulation systems is that our interference signals are phase-controlled and coherent, allowing for proper phase transmission of each signal type for each receiving antenna element. You can also add an INS capability to any of our systems. These types of systems are perfect for testing GNSS and GNSS/INS types of navigation equipment.
What’s coming by 2023?
One of the key trends is the ability to generate M-code (MNSA) signals. Jamming and spoofing are becoming more prevalent, not just to the military but also to consumers. Every day, the military, as well as people like you and me, are starting to encounter more instances of interference that can deny GNSS equipment and even phones the ability to track some GNSS satellites or that transmit incorrect GNSS data, causing receivers to display incorrect position solutions. So, our focus is on products and capabilities that enable our customers to simulate those types of environments and help them to mitigate those kinds of events.
Orolia
Lisa Perdue Product Manager
What is your most recent innovation?
At Orolia we continue to evolve our innovative software-defined simulator approach. Our most recent innovation is our advanced spoofing option. We have taken our ability to define multiple jamming transmitters, each with their own trajectory and antenna pattern, and added the ability for the transmitters to send spoofing signals as well. By utilizing our capability to run multiple simulations on a single system, we give the user the ability to control every parameter of the generated spoofing constellation(s). The system automatically calculates the signal time of flight and the propagation loss, making this advanced capability powerful and easy to use.
What is your approach to jamming and spoofing?
Simulation of threat environments is a critical component of GNSS receiver testing. As awareness of the impact that jamming and spoofing can have on a GNSS-based system rises, so does the need to test. That is why we have implemented advanced jamming and spoofing options into our Skydel simulator’s core engine. Replication of degraded environments with threats ranging from one to hundreds is possible using the same hardware and software used for generating GNSS signals. No third-party hardware or software is required for complete testing against jamming and spoofing because we feel that this capability should be part of the core system, not an afterthought.
Photo: Orolia
What’s coming by 2023?
In the coming years, we expect to see more requirements for simulation of alternative positioning, navigation, and timing (PNT) signals. As governments and organizations continue to investigate alternate technologies, it will become necessary to simulate low Earth orbit (LEO) PNT, ground-based transmitters, and other signals being considered.
Another growing trend is the adoption of controlled reception pattern antennas (CRPAs) for their anti-jam capabilities. These anti-jam antenna systems can only be tested by specialized simulation systems, so we can imagine these simulation systems being commercialized for a broader market around 2023.
Racelogic
Julian Thomas Managing Director
What is your most recent innovation?
Recognizing the need of our customers to test their products with a simple solution that uses the latest GNSS signals, we have updated our SatGen software to create accurate simulations using all satellite data currently being transmitted across the various constellations. We have also optimized the performance of SatGen so that a standard desktop PC can be used to simulate these signals in real time. Also, the simulation can now be driven using an external NMEA stream, allowing full remote control of the trajectory.
What is your approach to jamming and spoofing?
The LabSat 3 Wideband records and replays all available GNSS signals in high fidelity, allowing jamming and spoofing signals to be reproduced accurately on the test bench.
Photo: Racelogic
What’s coming by 2023?
With so many employees now working from home due to COVID-19, the pressing concern for many companies developing GNSS technology is how to provide employees with suitable equipment that is required for them to carry out their jobs efficiently away from the office. Usually these employees would utilize the shared resources of a well-equipped office, with experts on hand to help, but working from home has made access to these devices challenging. Due to LabSat 3’s small size, low cost and ease of use, we have seen a significant increase in sales to companies furnishing their employees with a suitable method of testing their GNSS devices while working from home.
With the advent of a new breed of high-performance, low-cost GNSS receiver, many new applications are being developed in new and exciting sectors, utilizing a level of accuracy previously considered too expensive to be a commercial proposition. The number of GNSS engines will therefore increase rapidly in the marketplace, with a corresponding increase in demand for cost-effective signal simulation for test and development.
Rohde & Schwarz
Markus Irsigler Product Manager Signal Generators, Power Meters
What is your most recent innovation?
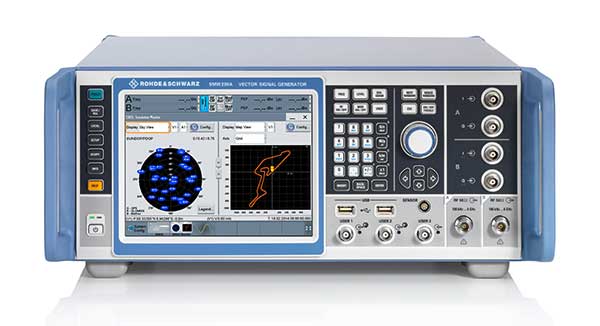
We further improved multi-frequency, multi-constellation simulation capabilities in our high-end segment. The GNSS high-end simulator R&S SMW200A provides signals for all GNSS frequency bands on a single RF output. A second internal RF path can be used for advanced interferer simulation, testing the receiver’s resilience to spoofing or to address dual-antenna scenarios. This keeps setups simple and compact. When more than two RF paths are required, two or more R&S SMW200A can be operated together in a master/slave configuration. Such setups are required for multi-antenna receiver test applications where the signals’ relative carrier phases are analyzed, like CRPA or attitude determination tests. Our new RF ports alignment software automates alignment of the GNSS signals and guarantees correct amplitude, time and phase relations at the RF inputs of the device under test. We also increased the maximum channel count to more than 600 channels to improve testing of multi-constellation, multi-frequency receivers against multipath, jamming and spoofing.
What is your approach to jamming and spoofing?
Besides our recent innovations, Rohde & Schwarz plans to provide new interference simulation capabilities within the GNSS simulator. This new feature will allow the user to replay recorded jammer signals as well as user-defined waveforms. The R&S Pulse Sequencer software helps with the definition of most complex interferer scenarios.
Photo: Rohde & Schwarz
What’s coming by 2023?
Developments in the field of advanced driver-assistance systems (ADAS) aiming for fully autonomous vehicles raise new challenges for reliable PNT solutions. Simulation of interference and jamming scenarios will hence become important in the automotive market. Antenna arrays have proven suitable to counteract RF interference (RFI) by incorporating spatial-processing techniques and might therefore find greater entry into the automotive market. Test solutions must address requirements for simulating all kinds of intentional and unintentional RFI for multi-constellation, multi-frequency and multi-antenna receivers. Apart from simulating GNSS and interference sources, test solutions for autonomous driving will require several other techniques and signals to be applied or simulated, such as RTK/PPP or outputs from other vehicle sensors to perform sensor fusion.
Spirent Federal Systems
Jeff Martin Vice President, Sales
What is your most recent innovation?
Launched in 2018, SimMNSA became the first MNSA simulator to achieve GPS Directorate security approval. The software enables users to simulate true MNSA M-code with real-time code and message generation, removing the constraints imposed by simulator data sets (SDS). SimMNSA v2.0 does even more. It is able to broadcast nominal M-code conditions and recreate SDS-defined events. It incorporates an advanced editor to edit military navigation (MNAV) content, allows users to craft and define scenarios, and much more.
What is your approach to jamming and spoofing?
Spirent offers numerous capabilities for emulating GNSS signals in the presence of interference and spoofing attacks. Our solutions provide accurate, repeatable and quantifiable signals, enabling customers to conduct accurate tests with trusted results. We can test against internally generated interference enabling multiple “fields” of jammers with various interference types; hundreds of interference signals using external IQ blended with simulator-generated GNSS, and Blue Force Electronic Attack jamming waveforms for testing MGUE devices operating in GPS-denied environments. Spoofing capabilities include signal, navigation data and cyber-level attacks via manipulation of up to 12 copies of each primary GNSS constellation, each fully editable; intuitive spoof attack generation via Spirent’s SimSAFE software option — which also allows live sky synchronization/spoofing, and more.
Photo: Spirent
What’s coming by 2023?
Threats to reliable and accurate GNSS navigation and timing are developing rapidly. Fortunately, innovative solutions for resilient PNT are in development and will continue to challenge the industry for years to come. The ability to simulate these threats and the mitigation techniques to overcome them is changing the landscape for the simulator industry. It’s more important than ever to have up-to-date test tools. Robust signals along with frequency and constellation diversity will continue to drive the market in addition to GNSS backup systems, or AltNav. The FCC has certainly presented the GNSS industry with an immense challenge.
Syntony GNSS
Sylvain Daubas Simulator Activity Manager
What is your most recent innovation?
Yesterday, GPS systems had to “work.” Today, they must work fine. This is the difference, and all equipment vendors have realized this. It is no longer acceptable to have 200 meters or more of error in an urban environment. Because of the extreme complexity of the electromagnetic situation in the GNSS spectrum, making a reliable and precise location system requires more and more powerful and advanced simulators. This is why the GNSS simulator market is booming.
Among the many new features implemented in Syntony’s GNSS simulator this year, two stand out.
First, 1000-Hz hardware-in-the-loop now allows an accurate simulation for high-dynamic receivers (up to more than 100 Gs!), with zero artifact and zero-effective latency. This is the ultimate in trajectory management.
Second, signal computing capacity has made a significant leap forward due to hardware and software optimizations. Constellator can now simultaneously generate up to 660 L1 C/A-equivalent signals. And this level of performance can be unlocked remotely, without a hardware update.
Photo: Syntony GNSS
What is your approach to jamming and spoofing?
Simulating a GNSS environment with a set of jamming or spoofing signal sources today is the standard. But what about a simulation of an extremely complex urban scene with 50 or 100 jamming/spoofing sources? The only reasonable solution to implement this would be a massive parallel software-defined radio (SDR)-based simulator solution. This is what Syntony can and will do, thanks to its full software GNSS simulator architecture, which can be distributed on a server farm.
What’s coming by 2023?
A revolution is arriving: the possibility of generating a full GNSS simulation including many hundreds of satellites and signals, in real time and in pure software. This is now possible, and Syntony has demonstrated it with the Constellator. This will change the simulation world. First of all, Moore’s law will bring significant improvements to this domain year after year. More importantly, new systems and services will be possible: massive parallel scenario simulation including jamming and spoofing, floating simulator licenses, software as a service, etc. In this trend, playback machines will be needed, and obviously a strong internet connection will be necessary to download hundreds of gigabytes of I/Q files overnight.
Feature image: Samuel King Jr./United States Air Force
GNSS has had a major impact on many different industries and market segments, but I believe that the incorporation of GNSS into cell phones has impacted more people around the world than any other. It’s almost hard to remember back in the last millennium when the idea of putting a GPS receiver into a cell phone was first contemplated. Back then, we were just starting the transformation from 1G phones (analog) to 2G phones (digital), and the whole idea of 911 for mobile phones was a huge hurdle facing the entire industry. Three small startups (SiRF, SnapTrack and Global Locate) were all founded with the seemingly impossible dream of putting GPS into every cell phone to provide location information for E911 and other commercial applications. Back in those days, we were trying to convince operators and the FCC that GPS could provide location accuracy better than the 150-meters 67% of the time that the cellular industry was leaning toward with other technologies.
Can you hear me now? A sampling of early cell phones. (Photo: yktr/iStock/Getty Images Plus/Getty Images)
Fortunately for everyone, we were able to convince the industry that GNSS was an answer that should be considered. Today, we see billions of phones around the world with embedded GNSS. Those early phones from Motorola, Nokia, Ericsson and RIM (Blackberry) were truly marvels of engineering development to tightly couple GPS and cellular. Interestingly, none of those phone makers — nor any of those three pioneering companies — exist today, having been subsumed into larger entities due to their success in solving this incredibly complex problem. Those early GPS L1 C/A-only phones have added GLONASS, Galileo, QZSS and BDS, and we are now starting to see support for L5 showing up in smartphones. This has all led to improved availability and accuracy — now not only can we locate E911 calls to the correct civic address for emergency responders, but commercial applications rely on <10-meter accuracy for driving directions, ride sharing and social media applications. Every time I think there is nothing new to do, something always comes along. I’m excited to see what’s next.
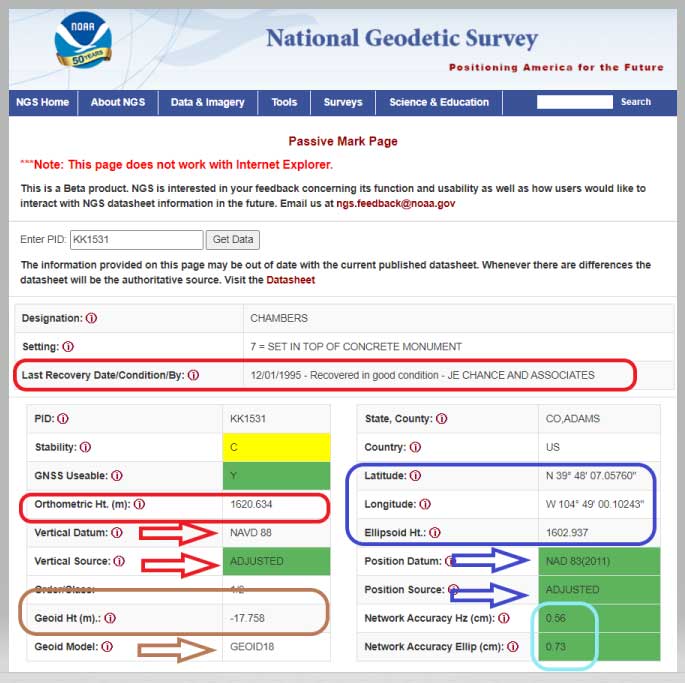
NGS has developed a new beta tool for obtaining geodetic information about a passive mark in their database. This column will highlight some features (available as of Oct. 5, 2020) that may be of interest to GNSS users. It provides all of the information about a station in a more user-friendly format. The box titled “Passive Mark Lookup Tool” is an example of the webtool. The tool provides a lot of information so I have separated the output of the tool into several boxes titled “Passive Mark Lookup Tool — A through D.”
I will highlight several attributes that I believe will be very useful to users, especially users of leveling-derived and GNSS-derived orthometric heights. I’ve highlighted several attributes in the box titled “Passive Mark Lookup Tool — A” that are important to users such as published coordinates, their datum and source, Geoid18 value, GNSS Useable, and the date of last recovery. All of these values are available on a NGS datasheet but, in my opinion, this provides the information in a more user-friendly format.
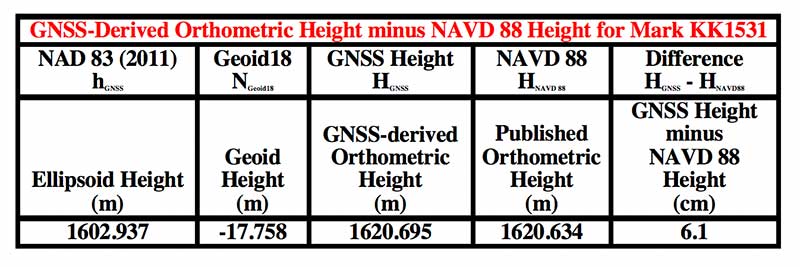
One calculation that the user can easily compute for marks that have been leveled to and occupied by GNSS equipment, is the difference between the published leveling-derived orthometric height and the computed GNSS-derived orthometric height. This may indicate that the mark has moved since the last time it was leveled to or that its height coordinate has been readjusted since the creation of the published geoid model.
The table below provides the calculation using the data from the box titled “Passive Mark Lookup Tool — A.” The calculation [HGNSS = hGNSS — NGeoid18; Difference = HGNSS — HNAVD 88] has been described in several of my previous columns (this one, for example).
Data: National Geodetic Survey
In this example, the difference between the GNSS-derived orthometric height and the Published NAVD 88 height is 6.1 cm. NGS is looking for comments on this beta webtool so if users would like this computation added to the tool, they should send a comment to NGS using the link provided on the site (This is a beta product. NGS is interested in your feedback concerning its function and usability as well as how users would like to interact with NGS datasheet information in the future. Email us at [email protected].) So, the user should ask the question, did the station move since the last time it was leveled?
Another attribute that would be nice to be part of this tool is which station was used to create the hybrid geoid model. As of Oct. 5, 2020, users have to go to the Geoid18 webpage to get the information. The Excel file and shapefiles provide whether the station was used to create the Geoid18 model. In the case of this example, KK1531, CHAMBERS, the mark was not used in the creation of Geoid18 so NGS felt that the station may have moved and/or the GPS on Bench Mark residual was large relative to its neighbors. See NGS’s technical report on Geoid18 for more information on the creation of Geoid18. The GPS on Bench Mark residual analysis was described in several of my previous columns (see “The differences between Geoid18 values and NAD 83, NAVD 88 values” and “NGS 2018 GPS on BMs program in support of NAPGD2022 — Part 6” for examples).
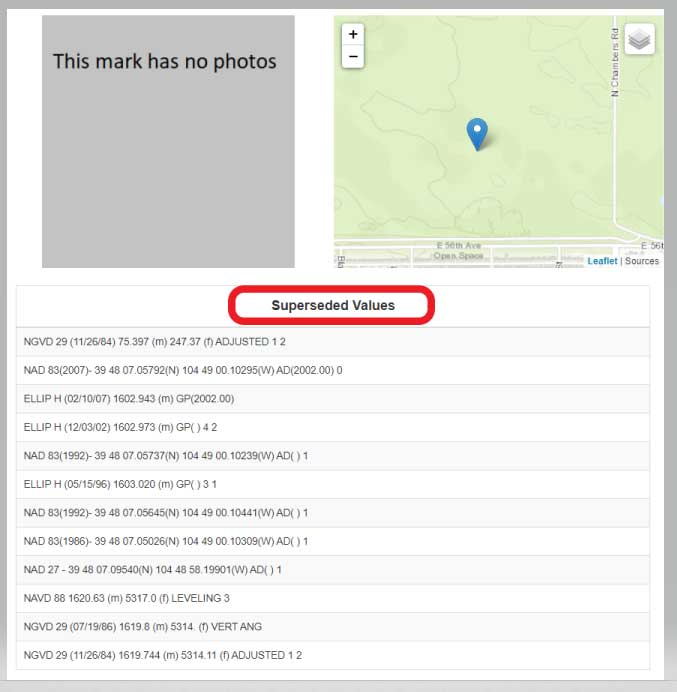
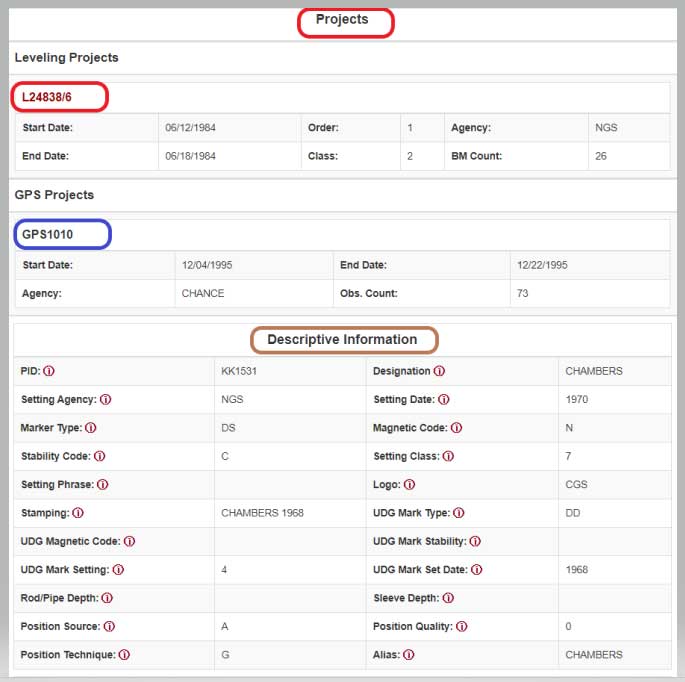
The webtool provides a map depicting the location of the station, photos (if available), and previously published, superceded values of the mark. See the box titled “Passive Mark Lookup Tool — B.”
In the example of Chambers, KK1531, no photos were available. It would be helpful if a user would provide photos to NGS when visiting this station. (Note: NGS has a webtool for users to submit recovery information about a mark as well as to provide current photos of the station.) The new Passive Mark webtool also provides information about the survey projects that the mark has been involved in such as leveling and GNSS projects.
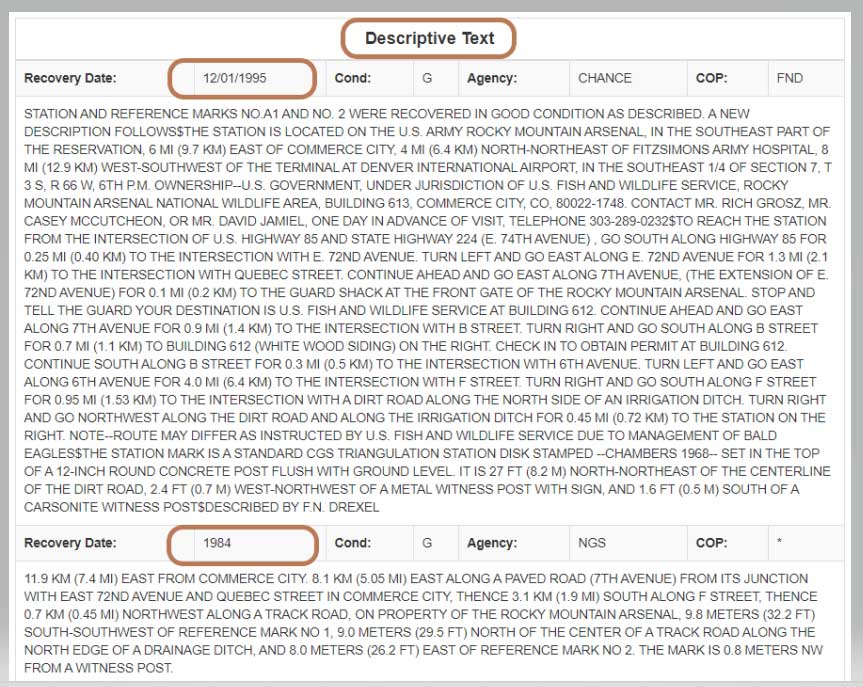
In this example, mark CHAMBERS was leveled to in a 1984 first-order, class 2 leveling project (Leveling Line number L24838/6) and, in 1995, the mark was part of a GNSS project (GNSS Project GPS1010). It also provides all the descriptive text and recovery information (See boxes titled “Passive Mark Lookup Tool – C” and “Passive Mark Lookup Tool – D”).
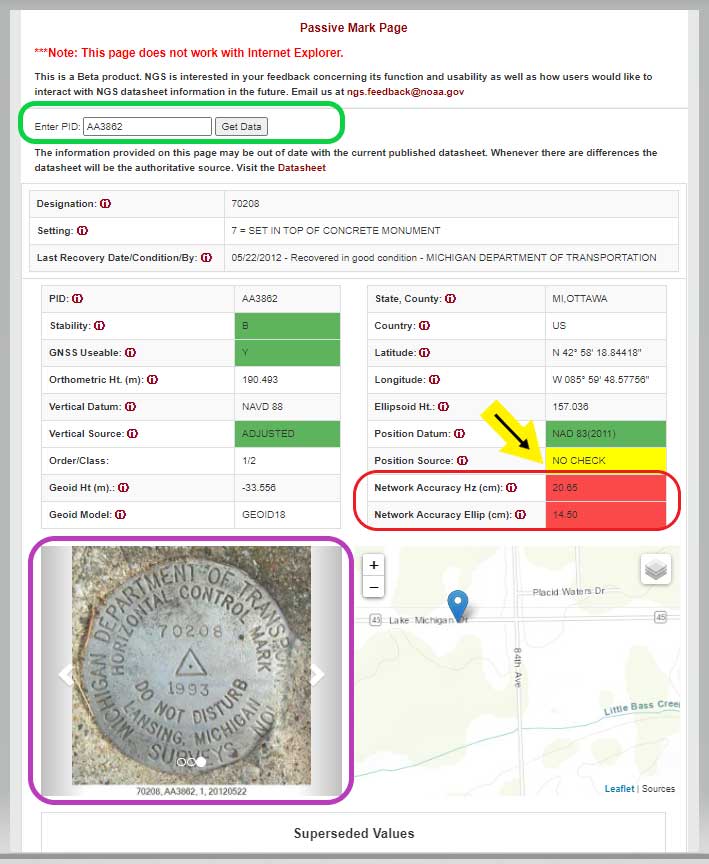
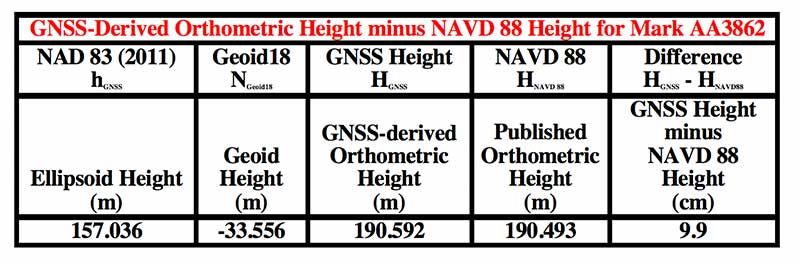
I want to highlight a few other attributes of this webtool. The station, PID AA3862, has an interesting attribute that users should take note of; that is, the NAD 83 (2011) position source is NO CHECK. See box titled “Passive Mark Page for PID AA3862.”
This means that the mark’s NAD 83 (2011) coordinates were determined without redundant observations. This is not a good survey practice but there are times that a project may contain check observations for some purpose or, more likely, the mark did contain other GNSS vector but they were rejected in the final adjustment. Either way, a good survey practice would be for users to verify the coordinates of these marks before using them.
Passive Mark Page for PID AA3862
Data: National Geodetic Survey
As previously mentioned, the tool provides the location of the station on a map and photos if they are available. This is a really nice feature for anyone searching for the mark. The map can be enlarged as well reduced by clicking on the box. See boxes titled “Passive Mark Page for PID AA3862” and “Photos of Mark PID AA3862.” The box titled “Photos of Mark PID AA3862” provides all three photos of mark PID AA3862.
Photos of Mark PID AA3862
Photo: National Geodetic SurveyPhoto: National Geodetic Survey
Photo: National Geodetic Survey
It should be noted, according to the Geoid18 GPS on BMs dataset that users can download, this station, AA3862, was not used in the creation of Geoid18. The table below provides the difference between the GNSS-derived orthometric height and the published NAVD 88 height.
In this example, the difference between the GNSS-derived orthometric height and the published NAVD 88 height is 9.9 cm. Also, the webtool provides the network accuracy values for the station. In this example, the horizontal network accuracy is 20.65 cm and the vertical network accuracy value is 14.50 cm (see highlighted values in box titled “Passive Mark Page for PID AA3862”). These are very large network accuracy values. This should be a flag to anyone that is using this station as control.
Data: National Geodetic Survey
As I previously mentioned, as a beta site, users should verify all information from the site. NGS is requesting feedback on this tool so they can improve it and make it an operational webtool. I encourage everyone to access the tool and check out a few of their favorite marks, and then send an email to NGS informing them of what you like, what you would like to change, and what you would like to see added to the tool.
NGS is releasing this tool as a beta product to get feedback from users. As NGS states in the heading of the tool, they are interested in your feedback concerning its function and usability as well as how users would like to interact with NGS datasheet information in the future. Email NGS at [email protected].
One last item that may be of interest to GNSS users is that NGS, working with the University Corporation for Atmospheric Research (UCAR), developed another online GNSS lesson (see box titled “New GNSS Lesson by NGS and UCAR”). These lessons are free but users must sign up to access the website and lesson.
When I started Racelogic nearly 30 years ago, I could not have foreseen how intrinsically embedded GPS would become in my life. I started out with the goal of supplying electronic control systems to the motorsport world. From traction control systems to paddle shifters for automatic cars, our technology rapidly built a reputation for quality and accuracy. It was this pursuit of accuracy that led me to GPS.
GPS can be used for a wide variety of applications, but still not many people realize just how accurate it is for measuring the speed of a moving object. It was whilst looking for a solution to measure ground speed to use as a reference for a traction control system for a 4-wheel drive rally car that we came across an Ashtech 20-Hz GPS engine and were amazed to find out just how accurate the speed output was. This was a turning point in Racelogic’s history, which led to the development of one of our best-known products, the Velocity Box (VBOX), which is used to measure speed, distance and acceleration of vehicles for use in the test and development of new cars.
It is undoubtedly an exciting time for GNSS. New signals and constellations are delivering a huge improvement in performance, which has spurred the release of new, lower cost, game-changing products into the marketplace. With cm-level position now becoming affordable for almost any application, it will be fascinating to follow how this changes the face of the positioning market, and see what innovations and novel applications will appear.
Delivering solutions to these emerging applications will require agility and flexibility to integrate GPS with sector-specific technology. If this can be combined with solutions that overcome some of the limitations of GPS, then the opportunities are boundless. I for one am excited to see where the next 30 years takes us.
Miguel Amor, chief marketing officer, Hexagon’s Autonomy & Positioning Division
GPS World celebrates its 30th anniversary, and together we’ve seen huge leaps of innovation over the years. Reflecting on these developments, I wanted to share some of the contributions Hexagon | NovAtel made to support the evolution of the GNSS industry.
We began in 1978 in Alberta, Canada, in the telecommunications industry. In the 1990s, we shifted our focus to satellite receivers, choosing to forge ahead in GPS/GNSS technology. This decision would see NovAtel become one of the world’s leading manufacturers of high-precision GNSS components and systems developing multiple new patents and innovative solutions.
Our engineers have seen first-hand the growth of GPS and other satellite positioning systems worldwide, GNSS adoption across industries from aerospace to agriculture, and the present-day developments of precise positioning in autonomous applications. A rising tide raises all boats, and we helped foster the evolution of the industry through our goals of assured autonomy and positioning.
GAJT-710ML anti-jam antenna. (Photo: Hexagon)
Assured positioning means a reliable and robust solution you can trust. Technologies we’ve contributed to the broader industry include our GPS Anti-Jam Technology (GAJT) protecting users’ positioning, time and navigation, and SPAN technology, which expertly combines GNSS and inertial navigation systems (INS) measurements for seamless motion observations and a robust positioning solution. The capabilities of these technologies have been major contributors to the evolution of the GNSS industry.
Hexagon acquired NovAtel in 2007, and we’ve continued to grow and develop exciting new opportunities around the world where GNSS can grow, strengthen and improve applications in agriculture, automotive, defense, marine and many other industries. Our mission of assured autonomy and positioning encourages us to continue providing assured positioning in the most demanding environments and begin bringing autonomy to these markets.
GPS World has been a key player in covering these technological advancements for the past three decades. Together as an industry, we’ll continue innovating positioning and autonomy, and I’m excited to see how the industry will evolve over the next 30 years.
Jules McNeff, vice president, strategy & programs, Overlook Systems Technologies
I welcome the opportunity to contribute and congratulate GPS World on your 30th anniversary. Over those 30 years, I have watched GPS influence how the world works. Early on, along with its vital contributions to U.S. and allied military operations, there was great optimism that sharing civil GPS technology openly would bring improved safety and efficiency to people around the world. However, that sense of optimism has dimmed as GPS, and the GNSS construct and PNT enterprise that it spawned, confront evolving real-world events.
Several years ago, I wrote a paper positing that in terms of dual-use utility and risks, GPS and related PNT capabilities are analogous to two other technology innovations that have occurred since the Second World War: atomic energy and the internet. The paper considered GPS/PNT in the context of each, reflecting our experiences with those two dual-use extremes.
The paper concluded that, unlike atomic energy, which has been fairly well controlled, GPS/PNT more closely resembles the internet, which has for better or worse been allowed to grow into a global capability virtually without constraint. For GPS/PNT, a fixation on civil, commercial and scientific uses enabled civil authorities uncomfortable with the military side of the dual-use equation to ignore that reality and focus only on “peaceful” civil and scientific endeavors. Unfortunately, the international comity that participants had hoped for, and that appeared for a time to be real, can no longer be assured.
Where the U.S. has been open and transparent regarding a dual-use GPS, others have not. Now, the open sharing of information that has been the hallmark of the civil GNSS community over the years must be viewed seriously and candidly through the clear lens afforded by the overt actions of GNSS providers.
Collective efforts to improve GNSS for peaceful uses ignore the reality that the information shared can equally and dangerously undermine international security. As with the internet, those who have become dependent on precise GPS/PNT services must now reactively create protections and remediations to deal with increasingly real threats from those we had considered colleagues.
So, naivete and optimism must finally yield in the face of hard reality.