eLORAN Initial Operational Capability at the Port of Dover
An overview of the work of the General Lighthouse Authorities of the United Kingdom and Ireland on the implementation of Enhanced Loran Initial Operational Capability (IOC) in the waters around Great Britain. eLoran is the latest in the longstanding and proven series of low-frequency, LOng-RAnge Navigation systems. It evolved from Loran-C in response to the 2001 Volpe Report on GPS vulnerability. It vastly improves upon previous Loran systems with updated equipment, signals, and operating procedures.
By Paul Williams and Chris Hargreaves
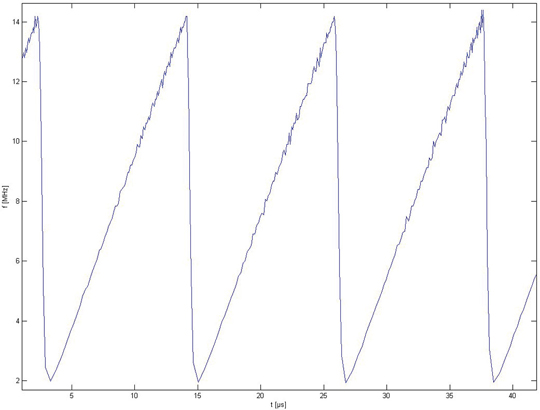
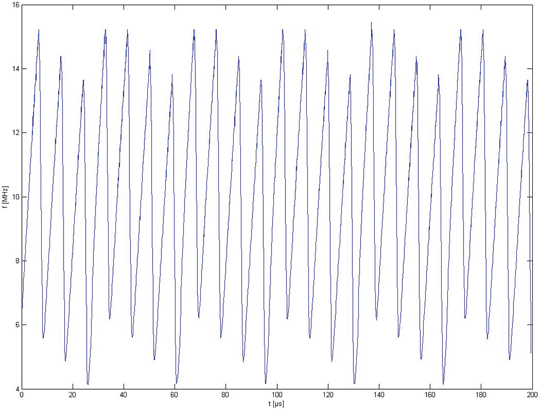
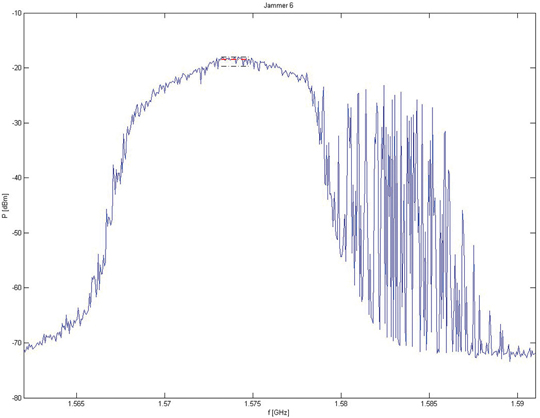
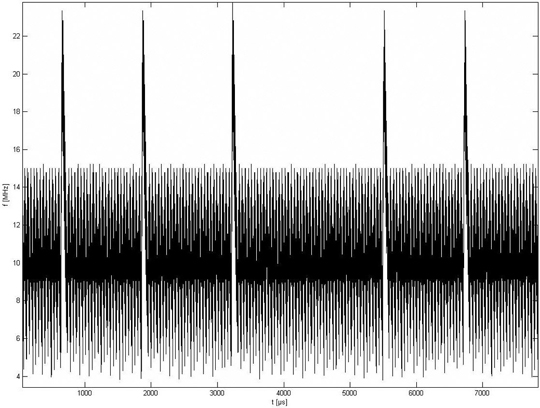
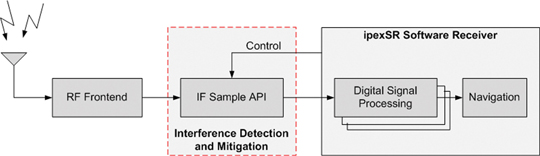
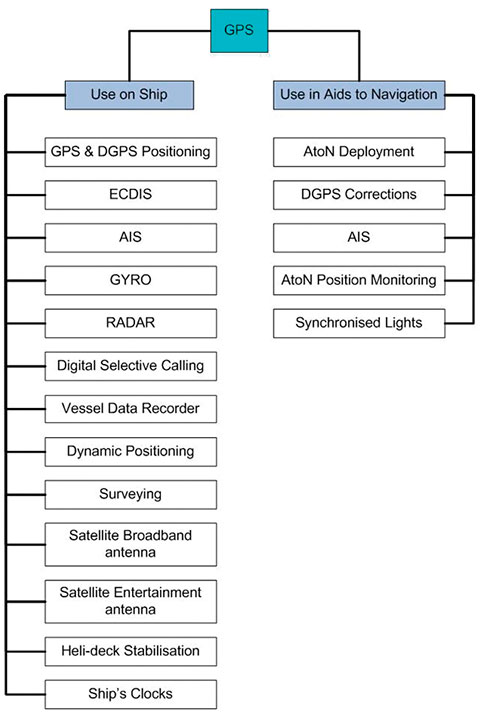
GPS/GNSS is everywhere! It is used in many ship’s systems (Figure 1), but it is vulnerable to interference both intentional and unintentional.
Its output is displayed on the electronic chart display and information system; is transmitted to other vessels using the Automatic Identification System (AIS); is used to calibrate the gyro compass; is used in the radar; is connected to the digital selective calling, its reported position transmitted at the push of the emergency button for search-and-rescue; is in the vessel data recorder, the dynamic positioning system, surveying equipment, the ship’s entertainment system for aiming the satellite dish; and it even synchronizes the ship’s clocks!
GNSS is also used in marine Aids-to-Navigation (AtoN) provision, for deploying buoys and lights, AIS transponders, and AtoN position monitoring, and its precise timing capabilities are used to synchronise the lights along an approach channel to improve conspicuity.
GNSS (effectively GPS) has become the primary Aid-to-Navigation (AtoN) used by all professional and most other mariners. The vulnerability of GNSS to space weather and interference (unintentional and criminal jamming) means that a backup system is needed to achieve resilient Position, Navigation, and Timing (PNT) for e-Navigation. Though the probability of losing GNSS may be low, the consequential impact could be very high, and maintaining an appropriate balance of physical and radionavigation AtoNs is vital for e-Navigation.
The International Maritime Organisation seeks to develop a strategic vision for e-Navigation, integrating existing and new navigational tools in an all-embracing system, contributing to enhanced navigational safety and environmental protection, while reducing the burden on the navigator. One of IMO’s requirements for e-Navigation is that it should be resilient — robust, reliable and dependable.
The General Lighthouse Authorities of the United Kingdom and Ireland (GLAs) have the statutory responsibility to provide marine AtoNs around the coast of England, Wales, Ireland, and Scotland. It has become clear over recent years that if the GLA chose to implement eLoran, it could rationalize its physical AtoN infrastructure, removing some lights and other physical aids, and on balance actually reduce costs by implementing eLoran. Indeed, compared to other possible resilient PNT options such as GNSS hardening, radar absolute positioning, increasing physical AtoN provision, eLoran would save the GLAs £25.6M over a nominal system lifespan of 10 years from the introduction of e-Navigation services in 2018 to 2028.
Not So Old-Fashioned. How does the new eLoran differ from the old, outdated, Loran-C system? The core signal of eLoran is pretty much the same as Loran-C, but tolerances have been tightened up. Things like carrier zero crossing points, half-cycle peaks, ECDs, transmission timing, signal power, signal availability, power supply resilience have all been upgraded, taking advantage of improvements in technology allowing us to better appease the so-called four horsemen of navigation: accuracy, availability, continuity, and integrity.
SAM control is a thing of the past, and eLoran transmitters are synchronised directly to UTC. This means that their times of transmission can be predicted. Having stations independently synchronised to UTC means that the mariner no longer has to rely on old-fashioned hyperbolic navigation. Charts with hyperbolic lines of position on them are also a thing of the past. A modern eLoran receiver works just like a GPS receiver, employing signals from all available transmitters in its position solution. With GPS those transmitters are moving in space; in eLoran the transmitters are fixed onto the surface of the Earth.
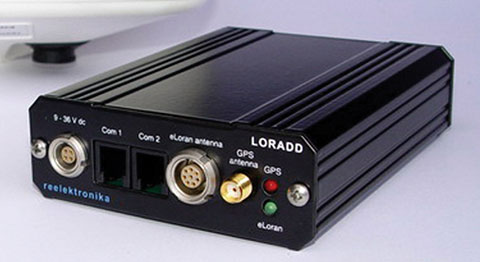
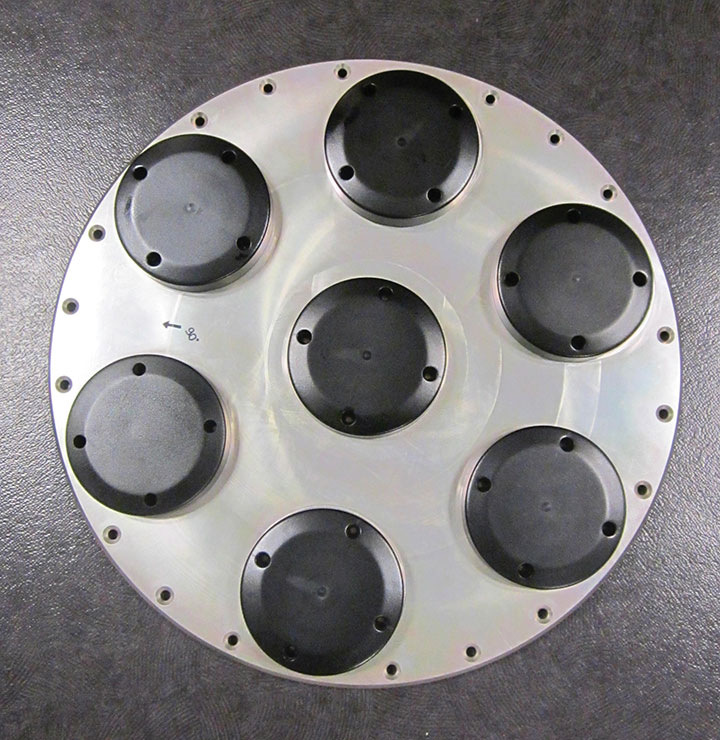
Modern receivers are small (photo). They use off-the-shelf, high-performance processors, and the receiver is written in software, allowing a lot of flexibility.
Three transmitters are sufficient to give you position; four or preferably five signals are better for integrity. But for timing and frequency applications you only need one transmitter. The Anthorn station in the UK can cover the entire UK and Ireland with a radio signal that has stability enough to satisfy the Stratum 1 frequency source requirement for steering the clocks of telecom networks, and Anthorn has not even been upgraded to full eLoran standard yet!
One of the big differences between Loran-C and eLoran is that eLoran now has a data channel. Some of the Loran pulses of each pulse group are modulated so that data can be sent over the 100kHz signal. This allows service providers to send integrity alerts, and application-specific data, like UTC time, and differential-Loran (DLoran) and DGPS corrections. In Europe this is implemented by the already internationally standardised Eurofix system.
A parallel can be drawn with GPS signals, which contain a navigation component (pseudorandom noise code and/or carrier phase) and modulated data. Some options for data channel technology are still evolving with 1500 bits per second demonstrated, and 3000 bps possible. That may not sound very much to salt-of-the-earth communications engineers, but for Loran it’s pretty impressive, especially when you consider prototype attempts at Loran data communications in the past have been limited to 30 to 250 bps.
Maritime Applications Services
How do we apply eLoran to something like the maritime application of port approach? It is important to remember that the receiver operates by measuring how long it takes a groundwave radio signal to travel over the surface of the earth. An eLoran receiver assumes that the world is made entirely of seawater, for which it has a very accurate propagation model built in. The receiver does not, and indeed cannot, know about any land along the propagation path; and land slows the signal down, perhaps by as much as a few microseconds, over typical propagation distances.
So the service provider must survey the effects of the land masses in the area of coverage. The Additional Secondary Factors (ASFs) of all the stations across the proposed service area are therefore mapped. The ASF survey is a once-and-for-all task, but it needs to be done and the ASFs published. In the old days, hyperbolic lines would be “grid warped,” or tables would be published on paper for the navigator to enter values manually. But with modern eLoran receivers containing large amounts of memory, quite detailed ASF maps can be stored in the mariner’s receiver.
ASFs depend on the electrical conductivity of the surface over which the eLoran signal travels. The conductivity changes with the constitution and moisture content of the earth. This means that the ASF along a path varies over a period of time —perhaps by as much as a few hundred nanoseconds over a year. Because the ASFs in a receiver are fixed, a method is needed to correct for this temporal ASF variation. In order to monitor this variation, a reference station is installed close to the harbor or point of use of the eLoran service. This DLoran reference station measures the temporal changes in the signals’ arrival times due to changing ASFs, transmitter variations, and weather effects.
The phrase “reference station” conjures up images of expensive buildings, amenities, and hordes of personnel and associated support services. However, a DLoran reference station is a small box sitting in the corner of a room connected to a small eLoran receive antenna on the roof, and to the Internet. It sends differential corrections over the Internet to an eLoran transmitter, which then broadcasts them to the mariner’s receiver over the Loran Data Channel, for example Eurofix.
Note that a DLoran reference station does not transmit a radio signal. It does not need a transmitter itself; it uses the Internet and the eLoran signal to disseminate its real time data. The mariner uses the same eLoran receiver to receive both the navigation signal AND the differential corrections.
So the process is: map ASFs once; run a reference station; and broadcast corrections. That’s it! With good signal-to-noise ratio and transmitter geometry, 10-meter or better accuracy can be obtained.
Measuring ASFs
The GLA have had the ability to measure ASFs for several years, using a combination of commercial hardware and proprietary software (Figure 2).
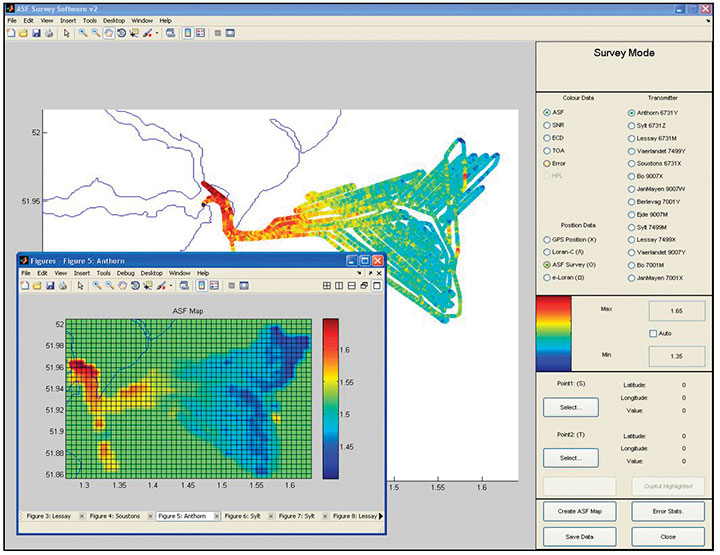
The software, written in Matlab, shows a real-time plot of the survey as it progresses. The ASF values are color-coded according to magnitude. The software can also process the ASF data once it has been measured, to get the best performance out of it. The real-time capabilities of the software allow the determination of the quality of the data while aboard the ship, rather than having to wait until back in the laboratory. Statistical analysis of the data can also show where the ship should go to gather more data in a particular area.
Once the survey is complete, the software can be used to generate interpolated grids of ASF data — the most convenient and accurate form of ASF data storage.
It is important with any scientific or engineering measurement to establish the error on that measurement. The same can be said of ASFs, and so the software can calculate the error bounds on ASF measurements. This “ASF error” data can again be published in grid form alongside the ASF database. This allows it to be used as one component of an Integrity Equation, implemented within the mariner’s receiver, to calculate Horizontal Protection Level (HPL).
After processing, the ASF data should be validated by performing a harbor approach or other maneuver that requires a particular positioning accuracy. For this, the software can be switched to “Validation” mode. Once the validation is successful, the data can be output in a publication format (RTCM SC-127 format for example).
The plot in Figure 2 shows part of an ASF database for Harwich and Felixstowe, major ports on the east coast of the UK. Using this data and DLoran in the Harwich and Felixstowe approach provides 10-meter (95 percent) positioning accuracy.
UK eLoran Prototype
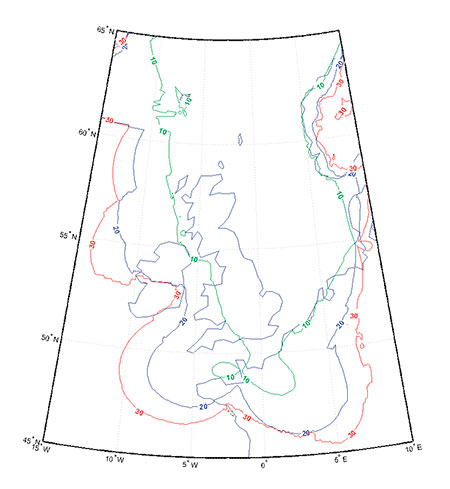
This prototype eLoran system works alongside GPS. It has been in operation 24 hours a day since May 2010. It is “prototype” because it demonstrates the concept of eLoran using signals from existing Loran-C stations in Norway, the Faroe Islands, Germany, and France plus the UK’s station at Anthorn; see Figure 3.

These stations, together with ASF measurements and DLoran, can deliver a high-precision eLoran service in ports where 10-20 meter accuracy is needed, across the area enclosed by the green contour in Figure 4.
It is very impressive, yet the full availability and accuracy benefits of eLoran are still to come as these stations are eventually upgraded to full eLoran capability. And for the last year or so, the GLA have begun to move beyond the confines of the Harwich and Felixstowe approaches and implement initial eLoran services in other regions around the GLA service area.
The GLA aim to do this in two stages. In the first stage Initial Operational Capability (IOC) service will be installed by mid-2014, with the second stage Full Operational Capability (FOC) service covering all major ports in the UK and Ireland, plus Traffic Separation Schemes, installed by 2019 or so in time for e-Navigation.
Initial Operational Capability
IOC involves upgrading the installation at Harwich and Felixstowe and new installations in the approaches to another six of the busiest ports in the UK: Aberdeen, Grangemouth, Middlesbrough, Immingham, Tilbury, and Dover. For each of these areas an ASF survey and a DLoran reference station will be required.
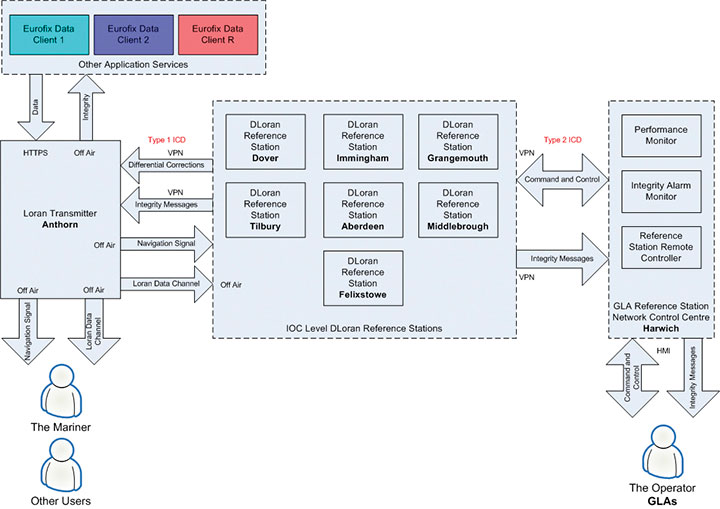
The corrections for these reference stations will be broadcast using the Anthorn Loran Data Channel. There is also the need for a Monitoring and Control System for the network of DLoran Reference Stations, and it is envisaged that this will be based in Harwich. Figure 5 illustrates the architecture of the Initial Operational Capability system. The diagram shows the major components: eLoran transmitter, DLoran reference station network, monitor, and control system. Also shown are the interfaces between the components, which provide not only operational data but also include the ability to monitor the integrity of the system. Also note that the Loran Data Channel is capable of supporting third-party messaging applications using a client “logon” facility. This is already being done at Anthorn.
The European tender process for seven operational reference stations and the control system is almost complete.
The aim of IOC is to provide areas for demonstrations and trials, so that the mariner can gain experience of the system and its capabilities and provide feedback to the GLA on its performance.
eLoran at the Port of Dover
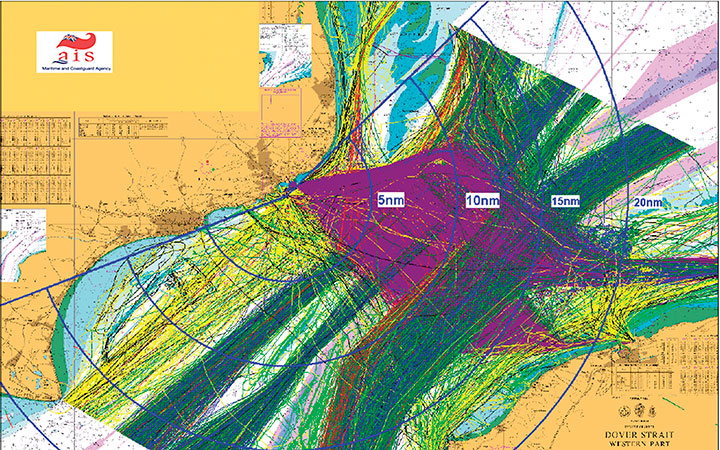
In the absence of the final operational reference stations, the GLA decided to perform an early implementation using prototype equipment that was already available at the GLA. The choice for this implementation was obvious: the iconic Port of Dover, a major port on the southeast coast of the UK and the Dover Strait, one of the busiest seaways in the world. Some 500-plus vessels travel through the Strait each day on their way to or from the North Sea region; see Opening Figure.
The GLA have, with the agreement of Port of Dover Operations, installed a prototype DLoran Reference Station within the port’s Terminal Control building. The roof of the building is an ideal location for the reference station receiver antenna as the location demonstrates low noise in the eLoran band and has easy access to mains power, cable runs, antenna mounts, and Internet access.
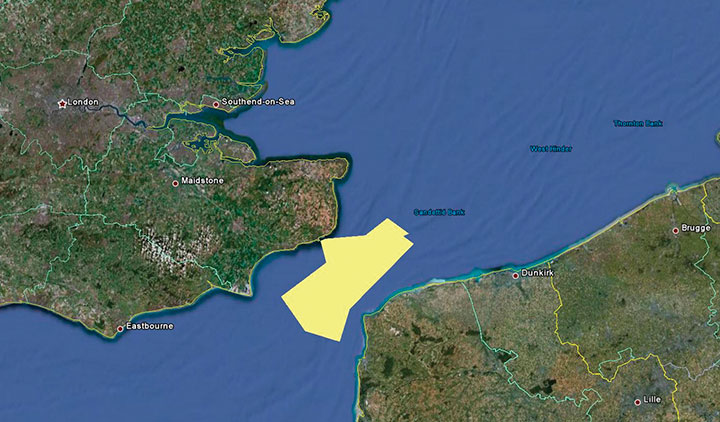
The ASF survey took place in March 2012, and covers the area outlined by the yellow polygon in Figure 6.
Accuracy Performance Validation
Once the ASFs had been measured and the prototype reference station installed, the performance needed to be tested. This was accomplished through a validation run of the vessel through the area.
Figure 7 shows a screenshot of the GLA ASF measurement software running in validation mode. The colored track shows the path of the vessel, with the color indicating the positioning error compared to differential GPS. The vessel travels through an area of extrapolated and interpolated ASF data, so the positioning error at the northern end of the track is higher than the lower end of the track.
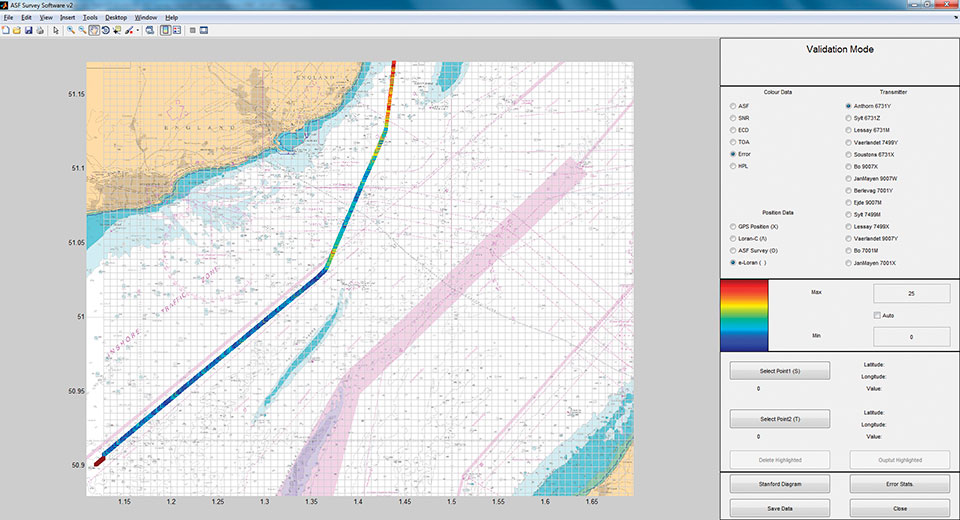
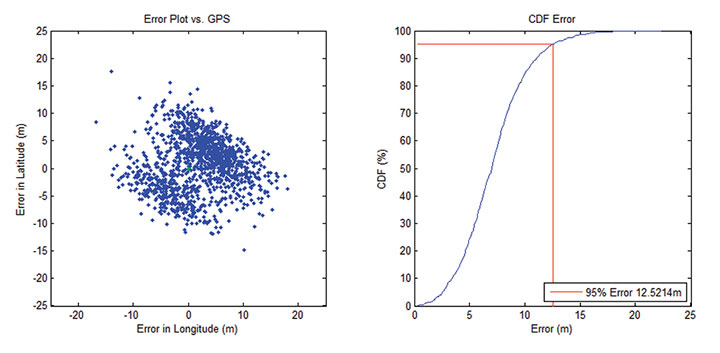
Figure 8 shows a comparison of eLoran positioning against DGPS positioning along the route as a scatter plot. The associated Cumulative Distribution Function (CDF) is shown on the right of the diagram. From this it can be seen that the positioning accuracy obtained along this particular route was 12.5 meters (95 percent).
Dover to Calais Ferry Installation. Further validation and demonstrations will take place aboard a cross-Channel ferry. P&O Ferries in the UK has installed a receiver aboard their vessel, The Spirit of Britain. This relatively new vessel is one of the largest passenger ships to operate along the iconic Dover to Calais route. Data will be collected and feedback obtained on the eLoran service’s performance over the coming months.
Other Areas
The GLA continue their work towards IOC-level eLoran. Dover was the first port of call for the GLA eLoran Initial Operational Capability — the ASFs have been mapped and a prototype DLoran reference station has been installed. The final operational DLoran reference stations should be available this time next year.
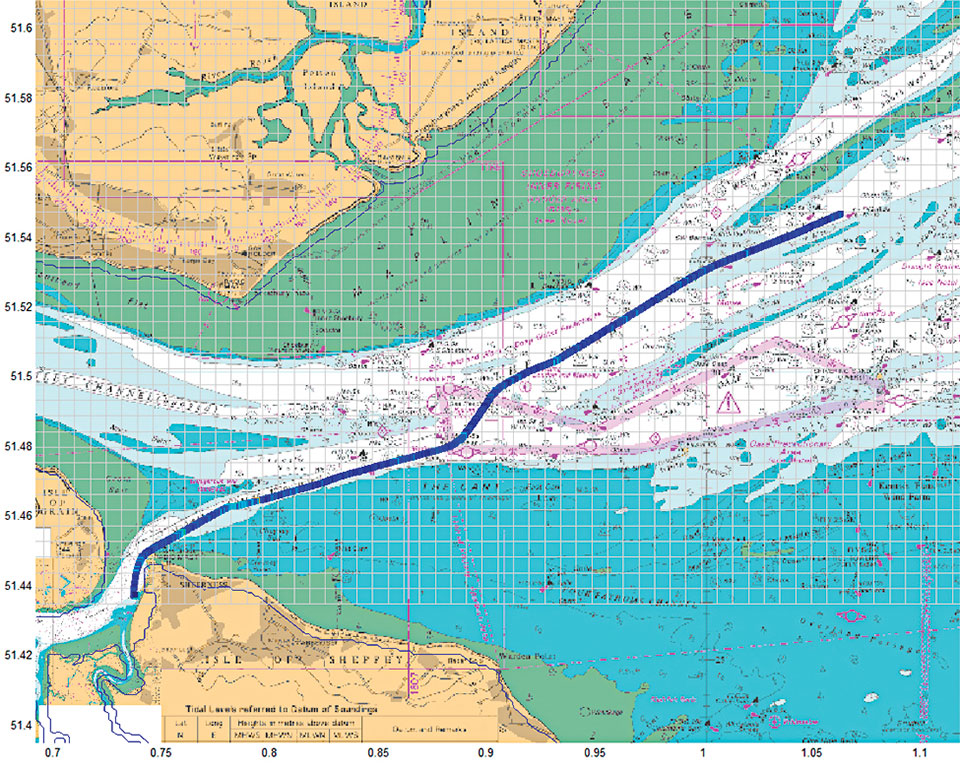
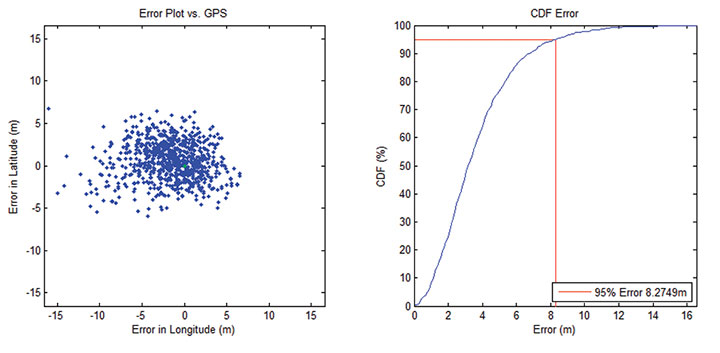
The next area the GLA have concentrated upon is the Thames Estuary up to Tilbury. Although the GLA have not yet installed a permanent DLoran reference station, the ASF survey was performed in November 2012 using a temporary reference station installed at Medway. Along the route shown in Figure 9, a validation trial demonstrated 8.3 meters (95 percent) accuracy (Figure 10). The GLA have also recently surveyed the River Humber, including its approaches, up to the port of Hull. The data is currently in the process of being validated.
Status and Next Steps
The next steps are to continue the implementation of IOC eLoran at the remaining port approaches for this phase. It is the aim that all ASF surveys will have been performed by the middle of 2014 in readiness for the installation of the operational DLoran reference stations at each candidate port. Licence agreements are being established with the various port authorities involved in order to allow this.
All ports that have been approached are positive and are keen to assist in the GLA eLoran implementations. eLoran noise surveys have been performed at all ports and locations for all DLoran reference stations have been found.
The Port of Dover has prototype eLoran up and running and has demonstrated 12.5-meter (95 percent) accuracy during the limited validation performed so far; however, further validation continues aboard the Spirit of Britain ferry.
The Thames Estuary ASF Survey has been performed, and 8-meter (95 percent) accuracy has been demonstrated in the area. The River Humber and its approaches have also been surveyed with validation in progress.
IOC-level DLoran reference stations should be available mid-2014, ready for installation.
The methods and processes employed during this work will be proposed for inclusion within the next version of the eLoran receiver Minimum Performance Specification as determined by Radio Technical Commission for Maritime Services (RTCM) Special Committee 27. These include techniques and algorithms used for ASF measurement processing, the preferred ASF file format, guidelines on the usage of ASF data, and integrity computation.
Acknowledgments
The GLA acknowledge the assistance of the crew of THV Alert, the Dover Harbour Board, Peel Ports (Medway), Associated British Ports (Humber), Aberdeen Harbour Authority, Forth Ports, PD Ports (Middlesbrough).
This article is based on a presentation made at the Institute of Navigation International Technical Meeting, January 2013, in San Diego, California.
Paul Williams is a principal development engineer with the Research and Radionavigation Directorate of the GLA, and technical lead of the GLA’s eLoran Work Programme, responsible for the ongoing roll-out of the GLA’s eLoran Initial Operational Capability (IOC). He holds a Ph.D. in electronic engineering from the University of Wales.
Chris Hargreaves is is a research and development engineer with the Research and Radionavigation Directorate Directorate of the GLA. His work focuses on eLoran in measurement trials, software development, and data analysis. He holds a masters’ degrees in mathematics and physics from the University of Durham and in navigation technology from the University of Nottingham.





 This year’s GPS Partnership Council provided among other highlights a discussion of the tensions between commercial off-the-shelf (COTS) receiver systems used in tactical combat operations versus official military GPS user equipment (MGUE), and an enthralling warfighters’ panel that revealed much of those COTS/MGUE dilemmas. The event, held May 1–2 in El Segundo, California, drew an enthusiastic and involved audience, including many GPS veterans. I was struck by the graying of the clan as well as the practiced and confident presentations of current civilian and military program staffs.
This year’s GPS Partnership Council provided among other highlights a discussion of the tensions between commercial off-the-shelf (COTS) receiver systems used in tactical combat operations versus official military GPS user equipment (MGUE), and an enthralling warfighters’ panel that revealed much of those COTS/MGUE dilemmas. The event, held May 1–2 in El Segundo, California, drew an enthusiastic and involved audience, including many GPS veterans. I was struck by the graying of the clan as well as the practiced and confident presentations of current civilian and military program staffs.