Several pleasant surprises popped up at this year’s Institute of Navigation’s Joint Navigation Conference (ION JNC) in Orlando, Florida, and the best by far centered on the presenters and the attendees. In a change from recent years due to budget restrictions, better known as sequescastration, this year two senior Air Force generals attended and actively participated in several events.
General (S) John Hyten – Vice Commander AFSPC – Courtesy of the USAF
General (S) John E. Hyten (USAF), currently the Vice and soon to be the Commander of USAF Space Command (AFSPC), participated in two days of ION JNC and was featured as the keynote speaker on the second day of the plenary session. As a senior steward of the Global Positioning System, indeed for all USAF Space Systems, General Hyten has a special place in his heart for GPS, having served as the Commander, 50th Space Wing, Schriever AFB in Colorado, the home of GPS.
The 2nd Space Operations Squadron is a component of the 50th Operations Group, 50th Space Wing, Schriever AFB, CO. The squadron was activated Jan. 30, 1992.
Conference attendees were pleasantly surprised with the access they had to General Hyten as he toured exhibits and joined fellow attendees for lunch, presentations, and discussions in the hallways. General Hyten made it clear that he was there to interact with ION JNC attendees and welcomed everyone to engage him in conversation. A rare invitation from a very busy general officer with huge responsibilities — and an invitation that many attendees clearly took to heart, as General Hyten was continually engaged in discussions during his two-day stay.
In his plenary presentation, General Hyten addressed GPS and the general lack of knowledge in the public today concerning the origins of the system. Hint — the answer is the United States Air Force. More on that later.
Major General (USAF) Robert Wheeler
Major General Robert Wheeler (call sign Wheels) also attended ION JNC this year to speak during the classified day on June 19 and to participate as an ad hoc member of the always-popular War Fighter Crosstalk Panel. General Wheeler currently serves on the staff of the Secretary of Defense (SECDEF) as Deputy Chief Information Officer for Command, Control, Communications and Computers (C4) and Information Infrastructure Capabilities (DCIO for C4IIC). General Wheeler is a command pilot with more than 5,000 hours in multiple aircraft, including the B-2 bomber in which he saw combat time over theater.
It was obvious from his initial comments in the classified sessions that General Wheeler is a warrior and staunch supporter of GPS and all things PNT-related. As much as I would like to relate some of his more pithy remarks, they were made in a classified environment, so sharing them is impossible in this venue. However, suffice it to say the General’s comments were well received by the war fighters who attended as well as the classified session attendees, which included many of our closest international allies.
The comment was made several times in my hearing that “We sure hope General Hyten and General Wheeler are invited back again next year.”
If all goes according to plan, General Hyten will be a four star and a MAJCOM Commander in just a few weeks. If he thought he was busy before . . .
Now let’s utilize that sage observation as a segue to General Hyten’s Plenary remarks at this years ION JNC. Having known John Hyten for over 20 years it has always been my experience that he does things just a bit differently – he hears a slightly different drumbeat and this year’s plenary speech was certainly no exception. Right from the start this speech was a bit different. General Hyten warned his audience he was going to praise them for their hard work and then gently admonish them but in a good way. With that opening statement he certainly had everyone’s attention. General Hyten asked for a show of hands from those attendees who knew that GPS originated with the USAF, the 50th Space Wing at Schriever AFB and particularly the 2SOPS (2nd Space Operations Squadron).
2SOPS operators on the GPS Operations Floor at Schriever AFB, CO
In the GPS/PNT-savvy audience Gen Hyten was addressing, literally every hand went up, and that was evidently what he hoped to see. The response was not a surprise to anyone, however the general went on to make the point that if he went out into the general population in the Renaissance Hotel at SeaWorld he would be lucky to find one in ten who even knew what GPS stood for, and that it came from space, and almost none would know that it was, is, and will for the foreseeable future always be provided free of charge to global users courtesy of the USAF.
GPS has been provided by the USAF free of charge for global users ever since President Ronald Reagan declared it so via a Presidential Decision Directive issued in 1988 shortly after the Soviet military shot down a Korean Air airliner (Flight 007) that had strayed off course and into Soviet Airspace due to a navigation error.
Ironically, General Hyten made the point that if the U.S. Government charged for use of the GPS signals, even at a nickel (5 cents) per user per device per year, it would pay for itself, and everyone would know that the USAF provided the service on behalf of the U.S. Government.
However, since it is free, ubiquitous, and considered almost a utility today, everyone around the world just assumes it will always be there and they don’t think about how or why the signals are provided. GPS is just always there.
GPS Orbitology 101- Courtesy of the USAF
General Hyten went on to make several cogent points concerning current and future use of GPS and other PNT assets. At the same time he warned us that there are those in the Pentagon [Obviously shortsighted, my comment, not the general’s.— DJ] who erroneously question why we still need GPS today. They myopically see it as an antiquated, compromised system. When in fact GPS and multi-GNSS PNT systems are on the cutting edge of technology.
The general made the comparison with WWII bombers that were being shot down at an alarming rate until the War Department (circa 1943) started the practice ofusing fighter escorts to help them fight through and return home safely. The analogy applies to GPS, which even today is being purposefully and at times maliciously attacked by spoofers and jammers.
Augmentations
Fortunately there are numerous actions that can and are being taken to secure GPS as a critical global service — fighter escorts if you will — that will not only help GPS maintain its preeminent Gold Standard position in the world of global PNT, but allow the system to grow and mature, even flourish, with additional high tech capabilities such as CNAV and MNAV (new civilian and military navigation messages).
Indeed the general stated that we have just begun to explore all the transformational capabilities being added to our GPS/PNT and multi-GNSS arsenal with the addition of L1-L2 M-Code (military code) and L2-L5 CNAV signals.
Of additional interest are space-based augmentations (SBAS) such as WAAS (Wide Area Augmentation System) and EGNOS (European Geostationary Navigation Overlay Service) as well as independent regional terrestrial augmentations and backups such as E- and D-LORAN (long range navigation), which today have demonstrated a time stability of 1×10(-12) and a position accuracy of 5-10 meters, an order of magnitude better than LORAN C’s 50-1,000 meters.
General Hyten went on to warn the commercial PNT vendors and government program managers in the 400+ audience that they must cease placing commercial GPS receivers in critical government systems that support the war fighters, government users, and our critical national infrastructure. Indeed he said this is why we have SAASM (Selective Availability Anti-Spoofing Module) and M-Code: to help secure these critical systems against interference, jamming and spoofing, intentional or otherwise. He also pleaded with industry manufacturers and vendors of PNT devices to please build their devices in strict adherence to the U.S. government;s ICD process. While the general declined to mention specific cases or companies, most in the room were aware of the ramifications of ICD non-compliance, from usefulness, mission and financial perspectives.
The general cited several known cases where, due to noncompliance, several systems just never did work well or consistently in a war zone. He said he knew of cases where “…the PNT systems worked fine in Yuma, Arizona but failed to work in Afghanistan. Please do not put commercial systems in critical military equipment.”
Pseudolites
Pseudolites are another area where the general has concerns. This is of course a hotly debated spectrum issue. Whereas we in the United States have been fighting highly-publicized spectrum battles, attempting to preserve the sanctity of the GPS spectrum globally, the Europeans are on the verge of approving pseudolite implementations all over the European continent that could seriously degrade GPS/PNT/Galileo signal reception and make PNT systems unusable or at least undependable in some critical areas, especially around the approaches to airports. Although on the surface pseudolites may seem like a good solution, I always remember what Dr. Bradford Parkinson is fond of saying: “An improperly implemented pseudolite is just another name for a potential GPS or PNT jammer.”
The Unofficial Test
After General Hyten’s comments, I decided to put his theory to the test. Just how many people know GPS is provided free to the world courtesy of the United States Air Force?
As someone who has been working GPS issues since 1975, I find it hard to believe that the American public is so uninformed about a system that is so critical to their everyday existence, because as most of you know, GPS is pervasive in almost all of our critical and not-so-critical national infrastructure. Indeed stealth GPS chips and receivers are embedded in so many devices today that it would be easier to name the devices that don’t use GPS. So I took the General at his word and set out to conduct my own mini-survey.
However, before I even had a chance to think much about what I would ask, I stepped into an elevator at the Sea World Renaissance Hotel where the ION JNC was taking place and found myself face to face with an elevator full of attendees from a major medical convention in the same hotel. They saw the ION JNC patch on my black golf shirt and asked me about it.
I told them and then asked what they knew about GPS. As in, did they know where the GPS signals came from and who provided them? Lots of answers were given and none of them remotely correct.
Frankly I was appalled, and before they exited the elevator I made sure they knew that GPS signals came from space and were provided totally free by the USAF. Mission accomplished. But not so fast; unfortunately the rest of my day and ad hoc surveys went about the same way. Some actually knew that GPS signals were free, some knew or thought they were provided by the government but had not a clue what agency or service.
Most thought they were radio signals from ground transmitters and were provided by the GPS equipment manufacturers. After asking more than 100 people where GPS signals originated and who provided them, I received exactly two correct answers, from wives whose husbands had recently served in the military in theater.
In my informal survey, 2% (two percent) of the respondents knew the right answers — and they had a military background. None of the true civilians had a clue. It was appalling and discouraging! Apparently General Hyten has done his homework and his point is well taken.
We need to get the word out that GPS is totally free, provided to the world by the United States Air Force. A simple but important message. Simple yes, and certainly discouraging at this specific venue, as this is a major part of the mission of ION and JNC — educating the world about the capabilities of GPS. Now I guess we need to emphasize the basics, just as GPS acquisition has reverted to a “back to a basics” approach. I agree with General Hyten that we (all those of us who care about GPS and all that it enables) need to do the same: get out the basic message every chance we get. Join me, won’t you, in getting that simple message across?
The next ION symposium, ION GNSS+ 2014 will take place September 8-12, 2014 at the Tampa Convention Center in Tampa, Florida. I hope to see you there.
Thanks
In closing I tip my hat to Lisa Beaty, the Executive Director of ION, and her entire team especially the new Military Division headed by my good friend and Institute for Defense Analyses (IDA) colleague Jim Doherty. Jim arranged the classified Cross Talk Military Panel this year, which was the hit of the show, as it has been under Jim’s leadership for the past several years. Jim stepped down this year as the Military Division Chair during the ION JNC symposium, and he will be sorely missed, although I suspect he will still be involved in some fashion.
The bottom line is that the ION symposia just keep getting better every year. The venues and the host hotels are first class, the food is excellent, and most of all the speakers and papers presented are scrubbed to the point that you really only get the cream of the crop. Unfortunately, you can’t say that about every GPS/PNT symposium today.
This year the exhibitors were in a large area that allowed everyone more room, and it made for a much more relaxed atmosphere in the exhibit area. I found that I spent a great deal more time with the exhibitors this year than in years past, and what I discovered there will be the subject of several future columns.
Until next time, happy navigating and remember, GPS comes to you courtesy of the United States Air Force.
Aim High!
What’s Don Reading?
Beyond Horizons – A Half Century of Air Force Space Leadership
David N. Spires, PhD – Professor Emeritus University of Colorado, Boulder, CO.
Reading good history volumes is one of my favorite pass times and when it comes to an early history of Air Force Space there is none better than Beyond Horizons.
Dr. Spires does an excellent job of setting the stage and explaining exactly how Air Force Space Command came into existence and why it was so sorely needed. The current volume covers the US Air Force and Air Force Space from its very beginnings at the end of WWII; think Dr. Theodore von Karman (Toward New Horizons) and General of the Army (Five-star) H.H. Arnold.
General Arnold actually flew a Wright Flyer back in 1911 and would have retired as a 5-star Army General but on May 7, 1949, Public Law 58-81 changed the designation of Arnold’s final rank and grade to that of General of the Air Force, and he remains the only person to have held the rank. He is also the only person to hold five-star rank in two U.S. military services. General Arnold was instrumental in funding and authorizing research conducted by von Karman, and von Karman was instrumental in research that eventually led to an Air Force and an Air Force Space Command. It is all here in this fascinating book which is edited by longtime friends and colleagues George W. Bradley III (PhD) and Rick W. Sturdevant (PhD), who serve today as the Chief and Deputy Historians respectively at Air Force Space Command.
The only pastime better than reading, this book is talking about it with the author personally, who was also a career Air Force Officer, which I have had the pleasure of doing briefly, on several occasions, and the conversations were fascinating. David is just full of interesting facts and stories concerning Air Force Space. I am convinced that if he were to commit them all to paper, there would be several volumes. I hope you enjoy this fascinating Air Force Space history.
Sometimes the patient has to get sick in order to get better. The eruption of a malady leads to identification of an underlying condition; appropriate treatment can then be devised to cure the body of its ills. Sound like House, M.D.?
As a variant on this plot line, the patient can know full well what is wrong deep down inside, but refuses to acknowledge or deal with it. As in, “I’ll stop smoking when I start coughing,” or “My drinking hasn’t gotten to the problem stage . . . yet.”
Let us examine the patient GNSS. The April signal outage, system-wide on the GLONASS constellation, lasted less than 12 hours. That was long enough to cause consternation for end users around the world, and for several voices to renew their calls for multi-constellation GNSS and alternative PNT. The interruption was also short enough that it has now vanished from most rear-view mirrors. Everything is back to normal and everyone can go about their business.
But the patient is still unhealthy, and vulnerable.
It is easy enough to fault the system operators, who after all are only human, and to say, “That can’t happen here. We have enough safeguards in place. And our guys and gals are just that good.” In other words, we take enough antibiotics and are generally, you know, well, healthy. As healthy as anyone else.
We have yet to see a full-scale jamming or spoofing attack on the order of cyber-security breaches in other targeted areas that have made off with millions or billions of dollars.
We have yet to experience a truly major-league Sun event, when global circumstances would be in dire need of PNT help just when GNSS was least helpful.
We have yet to encounter some other unknown, unexpected event or environment that will reveal in painful detail the vulnerabilities of GNSS.
Which are well known to us at this writing.
This month’s cover story on a new enhanced differential Loran technique represents one arm of geospatial-medical research. Notably, it evinces little concern for GLONASS, the area where the latest malady erupted. No, the Dutch harbor pilots are concerned about over-reliance on GPS, the Gold Standard. The Gold Standard! What could possibly be wrong with the Gold Standard? After all, it’s golden.
GPS III Misses Delivery Date. The U.S. Air Force is shopping for alternative companies to make future GPS III satellites after the first eight birds come through. Current contractor Lockheed Martin Space Systems missed a 2014 delivery date because, although it has three satellites in the production barn and a satellite test-bed vehicle that has successfully passed system tests, it has received no payload from subcontractor Exelis to put aboard same.
Delivery of the first GPS III satellite is now expected to slip from fiscal 2014 as far as fiscal 2016. Then there’s launch to consider, which brings to mind the launch budget and schedule, annually trimmed back by Congress. Then there’s OCX, needed to operate GPS III, also struggling to stand up.
Even once established, GPS III will share the same vulnerabilities of current GNSS.
I’ve written this many, many times in the past eight years that I’ve written for GPS World magazine, but I have to write it again — this is an exciting time for GNSS!
For me, high-precision GNSS is particularly exciting. I’ve been traveling like crazy, and involved in a number of really fun projects that incorporate high-precision GNSS. Of course, on these various projects I usually incorporate many types of technologies that support GNSS, such as computing, communications, power, and mechanical.
Along those lines, I find myself more and more frequently setting up custom RTK bases for companies because they’re getting cheaper and cheaper, regardless of the fact that there are an increasing number of publicly available real-time kinematic (RTK) base stations. Setting one up doesn’t just involve plugging power into a RTK base receiver and hitting the on/off switch. As I mentioned above, setting up an RTK base involves several different types of technologies. Sometimes, I set up a desktop computer next to the RTK base to act as a server to manage the RTK GNSS base and communications (both network and RTK communications) equipment.
In your mind, when you think of a desktop computer, you probably envision something that occupies 2-3 square feet (~one square meter) of desktop space, along with a keyboard and monitor. So, a consideration when deploying an RTK base is finding desk space somewhere in the user’s office to accommodate the desktop PC and other equipment.
Recently, I took a different approach. I found (actually, my client found) an incredibly small computer to be our server. Just as high-precision GNSS receivers are getting smaller and smaller, so are computers. The Intel Mini-PC measures 4 inches x 4 inches (10.16 x 10.16 centimeters) and has no hard disk. It uses solid-state drive (SSD) memory for storage. SSD technology is still somewhat expensive ($1+ per gigabyte), but it is small compared to a classical disk drive, and doesn’t have any moving parts. Furthermore, the Mini-PC has ethernet ports: when we connect a network cable to it, we could access the Mini-PC via Remote Desktop. That meant we didn’t need a keyboard or monitor. The Mini-PC had all the power we needed, and we could load any sort of control software on it because it runs the standard Windows 7 (or 8) operating system. Last but not least, the Mini-PC costs only $149. However, you need to add memory, SSD, and so on, so the real cost is ~$400 depending on your configuration. While not cheaper than similarly performing “boxes” available, it’s certainly one of the smallest.
Intel Mini-PC Measuring 4″ x 4″
In fact, it’s so small that we stuffed it inside a 14” x 12” electronics enclosure box along with the RTK GNSS base and other network equipment, and hung it out of sight on a closet wall. No desktop space required. Without stretching your mind much, you can see where desktop computing is headed; very small and inexpensive enough to be dedicated to specific tasks. Think about this and then consider the Internet of Things concept. It’s very exciting.
More RTK on Mobile Devices
Later this week I’ll be experimenting with RTK on mobile devices with the CRTN (California Real Time Network), a collection of 330 RTK bases located throughout California. I’ll be using a Panasonic ToughPad running ArcGIS Mobile (and maybe ArcPad) and an iPad using a cloud-based mapping service. The latter is particularly interesting because there are lots of cloud-based GIS data collection apps on the market and under development. Specifically, there’s a lot of subscription-based, cloud-based software. The challenge is that they are even less geodesy-intelligent than the “professional grade” GIS data collection software on the market. In other words, they read coordinates (NMEA format) from GNSS receivers and feed them directly into their app. No datum transformations are provided, neither horizontal nor vertical. That’s going to be a problem.
FCC Levies Record Fine Against Chinese Supplier of GPS and Mobile Phone Jammers
The Federal Communications Commission (FCC) announced that it plans to issue the largest fine in its history against C.T.S. Technology Co., Limited, a Chinese electronics manufacturer and online retailer, for allegedly marketing 285 models of signal jamming devices to U.S. consumers for more than two years. The FCC plans to levy a $34.9 million fine against CTS. The FCC reported that CTS sold 10 high-powered signal jammers to undercover FCC personnel.
The FCC is asking people to report the sale or use of an illegal jammer by contacting the FCC Enforcement Bureau through the FCC online complaint portal, or by calling 1-888-CALL-FCC (or 1-888-225-5322). To voluntarily relinquish a signal jammer, e-mail [email protected]. Additional information, including the FCC Consumer Alert on the jamming prohibitions and the FCC Enforcement Advisory to retailers regarding the marketing of illegal signal jammers, is available at www.fcc.gov/jammers.
You can view the FCC enforcement action against C.T.S. here.
Satellite Launch Pads are Warming Up
Two GPS Block IIF satellites, one launched in February and one launched in May, were set healthy in the past three weeks, making a total of six IIF GPS satellites in orbit broadcasting on three civil frequencies; L1, L2C, L5.
On July 31, the seventh GPS IIF satellite is scheduled for launch, followed by an October 2014 scheduled launch of the eighth GPS IIF satellite.
On June 14, Russia launched a GLONASS-M satellite. It has not been set healthy yet. There are a total of 24 healthy GLONASS satellites in orbit. You can check the current status of GLONASS satellites here.
On August 22, Europe is scheduled to launch the first two Galileo FOC (Full Operational Capability) satellites to add to the four test satellites in orbit that will be integrated into the final operational constellation. A second pair of Galileo satellites is scheduled for launch in November 2014. These are projected dates and subject to slippage.
Galileo Satellites in the Clean Room
Live Webinar from the Esri International User Conference on July 17
In a GPS World first, we’ll be producing a live Webinar from the Esri International User Conference next month on Thursday, July 17 @ 10 am Pacific Time in the exhibit hall at the San Diego Convention Center. Of course, the webinar will be focus on one of the hottest topics, high-precision GNSS on mobile devices; from iPads to Android tablets to smartphones.
Tune in or join us live from the exhibit hall floor! Register here.
Calling it an “unprecedented and deeply worrying total disruption . . . [that] shook the industry,” Locata Corporation reiterated its call for redundant terrestrial systems to back up GNSS in the wake of the April 1 11-hour GLONASS system outage.
Nunzio Gambale, Locata CEO, said “We have been telling the industry for years that you cannot have a critically important capability like GPS without also having a backup! What is Plan B if the satellite systems fail? What replaces the space signal when there is a problem? If anyone needed a sign to understand why Locata has spent years inventing and developing the world’s first local terrestrial equivalent of the GPS system, then last week’s meltdown of a complete global satellite navigation system is it. This event should terrify every nation, government, and company that depends on navigation satellites for their business or, in some cases, their very lives.”
The navigation and timing functions of the global positioning systems underpin the world’s banking systems, stock exchanges, digital TV and Internet, cell phone networks, and, in some cases, the national electricity supply, Locata pointed out. GPS, in particular, plays a crucial role in transportation, shipping, and logistics, serving as the enabling technology for critical functions like air traffic control. Reliability is therefore not just important; it is essential across all applications. Locata, the Resilient Navigation and Timing Foundation (RNTF) in Washington, D.C., and others have persistently called attention to the need for redundant terrestrial systems that will back up expensive, vulnerable, and aging global satellite navigation constellations while simultaneously providing the local control and resiliency that satellite-based systems cannot deliver.
Professor Chris Rizos of the School of Civil and Environmental Engineering at the University of New South Wales stated that “This catastrophic failure of one of the world’s two global satellite navigation constellations is a wakeup call for all of us. We ignore the possibility of these ‘Black Swan’ events at our own peril.”
The GLONASS disruption was felt around the world, immediately upon its origination, especially in professional applications, such as tractor automation for farming, machine control and robotics in mining and heavy industry, and in the national infrastructure used by surveyors and industry across many countries.
“This shows just how interlinked the physical and cyber worlds have now become,” added Professor Brett Biddington, a space and cybersecurity expert from the School of Computer and Security Science at Edith Cowan University, Australia. “The prospect of a software glitch, whether unintentional or intentional, seems highly likely [as a cause for the failure]. If it was a deliberate attack, however, it points to a changing face of warfare where the real enemy may be impossible to detect and deter until very damaging strikes, such as an attack on the GPS system, have already taken place.
“The vital point here is that this is no longer just a question for scientists and technologists. A locally controlled backup system for this essential signal is a national policy question of the highest order.”
Locata Corporation and other industry authorities have long testified on global satellite navigation vulnerabilities and the need for diverse technology options to strengthen and back up GPS, GLONASS, and other systems. Locata developed a robust solution and has been awarded a sole-source contract by the U.S. Air Force (USAF) to provide its terrestrially based alternative positioning for military applications where GPS has been completely jammed. The first wide-area Locata system is being deployed now at the White Sands Missile Range in New Mexico. The USAF demonstrated that the White Sands Locata network delivers what has been extremely high accuracy over a 2,500-square mile area, positioning aircraft flying up to 35 miles away to an accuracy of better than six inches.
A pair of LocataLite transmit antennas overlook a section of the White Sands Missile Range blanketed by the Locata high-precision ground-based positioning system.
“There is no other technology that can do this, and it’s delivered in the complete absence of GPS,” continued Gambale. “What is being demonstrated at White Sands is that Locata supplies precisely the same function as GPS, even when there is no GPS available. That’s exactly what you need if the satellites fail.
“If this event had been a GPS failure instead of a GLONASS failure – and it could very easily have been – then the entire world would have plunged into a catastrophe. This event is the navigation equivalent of a ‘close call moment,’ and from here on out no one can even question that this is a really serious problem that must be addressed. Another industry expert recently told me, ‘If there was a sustained GPS outage, it would cause a global financial nuclear winter from which it would take us decades to recover.’”
Gambale concluded, “We need action to develop local backups like Locata around places like airports and other strategically important areas – now! We must not wait until we are faced with another seemingly impossible event like a complete satellite constellation failure. We may not dodge this bullet a second time.”
Locata terrestrial positioning technologies complement GPS by setting up ground-based transmitters, called LocataLites, to create a local constellation called a LocataNet. Once properly deployed, Locata’s unique nanosecond-accurate TimeLoc system synchronizes the network, which allows it to replicate the positioning capabilities of GPS, locally. LocataNets operate today in environments ranging from small warehouses to open-cut mines, wide-area aircraft approach-and-landing systems, and wider areas for aircraft and unmanned aerial vehicle (UAV) uses.
Galileo Growth, Constellation Updates, and Jamming
I used to spend quite a lot of time in Munich working on a multi-national, multi-role fighter aircraft program, so returning for this year’s Munich Satellite Navigation Summit stirred some good memories for me.
Held in the opulent Residenz Muenchen March 25-27, the conference always has a special atmosphere that these historic 1385 surroundings convey to the attendees. The former royal palace of Bavarian monarchs, the whole complex has ten courtyards and 130 rooms. The summit was held in the Max-Joseph Hall, which took a little bit of work to find at first, wandering around the huge complex. One wing of the building hosts a theater, and the mainhall is the primary concert venue for the Bavarian Radio Symphony Orchestra. Overall, this is a delightful setting.
Munich is in the Southern German state of Bavaria, and Bavaria has taken a real interest in the promotion and success of Galileo; witness the extensive Bavarian booth at recent European and North American GNSS conferences. Germany has, of course, been one of the principle nations providing significant funding for Galileo from its inception.
Ilse Aigner
So with this backdrop, the summit brings together people involved with GNSS from around the world to report on the current status of GNSS and to relate how their participation in satellite navigation has progressed. And, of course, Europe, Germany, Bavaria and the European GNSS industry, which is now recognized around the world, all take the opportunity to present their capabilities and successes.
The plenary session on the first evening covered GNSS, Earth Observation (EO) and Telecommunications — with the panel headed by Ilse Aigner, Bavarian State Minister of Economic Affairs and Media, Energy and Technology — an extensive mandate, even for a state-certified engineer who used to work for Eurocopter.
Dr. Merith Niehuss, speaking at the opening of the summit. (copyright: Munich Satellite Navigation Summit).
The host of the summit is actually the University of the German Army in Munich, and we received a warm welcome from two leading professors: Dr. Bernd Eissfeller and Dr. Merith Niehuss, the president. The theme of the summit was to move from implementation to utilization, and in typical European form, all parties were looking to shower potential users with funded solutions to problems of which users are not yet aware — so users clearly need government-provided education, pilot projects and funding. Not exactly a North American concept, where we tend to encourage users to buy our innovative stuff by demonstrating how it can save them money or earn them more revenue.
The European Commission, ESA, DLR, European GNSS Agency (GSA), Airbus, OHB, and Telespazio were also represented. The minister did indeed associate with and praise the local area, claimed 1,000 jobs created related to Galileo through an incubation center at Oberpfaffenhofen, and declared Bavarian support for satellite navigation.
Other important things mentioned by the panel at the plenary included an €11B budget for Galileo/EGNOS and Copernicus (EO project) under the Horizon 2020 program, and an intent to declare Early Service for Galileo before the end of this year with two or three dual Galileo satellite launches — the first two FOC (production) SVs should go to the European launch center in Kourou in April in preparation for launch around June. I heard in a corridor that launches may be planned for June, October and December, but an EU spokesman later said that there would only be two launches this year. OHB now has the contract to build 22 FOC Galileo SVs, each with a design life of 14 years, and they are bullish on their ability to deliver on time and budget.
The program continued the following day with constellation updates from GPS, Galileo, Beidou and the UN International Committee on GNSS (ICG) — GLONASS delegates were notably absent. There was much speculation that they declined to attend due to the Crimean situation, and one U.S. delegate even inferred that they were “uninvited.”
Constellation Updates
GPS: It’s estimated that there are ~2B GPS receivers in use, and there may be ~10B by 2020. A return on investment (ROI) analysis is currently underway, but a rough guess is that costs are in the tens of billions, while annual returns are of the order of $60-100B/year. Another IIF satellite (SV) launched last month, bringing the total to five SVs transmitting L1, L2C and L5, with seven more to come, and multiple launches are expected this year. There are 30 operational SVs on orbit, signal performance significantly exceeds the specs, and consistent, dependable performance has been provided for more than 20 years.
Galileo: First fix was achieved March 12, 2013, with four SVs, two (maybe three?) launches of two SVs each planned for 2014, and early operational capability to be declared by end of this year. €7B in funding is provisioned for 2014-2020, with 16-24 operational ground stations, Commercial Service (CS) planned by 2016 (more on this later), and a long-term evolution plan being worked up during this year.
BeiDou: Fourteen SVs are on orbit — five GEO, four MEO and five Inclined Geosynchronous Orbit (IGOS) satellites, providing dual-frequency services. Thirty total SVs are planned, and the intent is to provide open, compatible, interoperable signals with other GNSS free of charge. There was not much other news to report, other than that China intends to invest significantly in BeiDou to keep improving services.
United Nations ICG: Nine nations and European Union = International Committee on GNSS (ICG), with 20 other associate and observer States. Activities include GNSS compatibility/interoperability, GNSS enhancements, information sharing, and reference frames, timing and applications — lots of upcoming meetings and activities.
Regional and Augmentation Updates
WAAS: Phase IV is underway with GEO replenishment begun, introduction of L5 to replace L2, and replacement of obsolete component parts. One hundred GIII receivers were ordered with L1/L2C and L5 capability for delivery by September this year — and have capacity to also add Galileo. GIII receivers have already been fielded in six locations as part of initial integration testing. The Safety computer will also be upgraded starting this year. 3,912 LP/LPV approaches have been approved, of which 3,379 LPVs serve 1,667 airports. GBAS CAT I is progressing with four U.S. airport installations. System design approval began in January this year, and United Airlines has begun equipping over 90 B737/B787 for GPS approach and landing. Alternative Positioning, Navigation and Timing (APNT) investigations are underway (as a backup to GPS) with a hybrid DME-pseudolite configuration currently favored. Stanford University subsequently presented this and other concepts.
EGNOS: A €1.58B budget has been approved, and EGNOS V3 evolution is underway, with L1/L5 and GEO (SES 5 and Astra 5B) replenishment, a requirement to expand East and West and to the North to provide full coverage to all EU States.
About 100 EGNOS LPV approaches are approved — this year, it’s hoped to add 150 more.
QZSS: The operational concept has been proven with the first IGOS SV (Michibiki), so Japan is moving forward quickly to add another three SVs (3xIGOS and 1xGEO) and ultimately would like to have a total of seven SVs in orbit providing QZSS services. L1/L1C/L2C/L5 signals are identical to GPS, and L1s/L5s are augmentation signals, while L6 is proposed to be similar to Galileo E6, providing centimeter-level PPP-type service. QZSS essentially is intended to provide higher elevation satellites to improve urban navigation in dense cities.
IRNSS: Coverage extends 1500 km beyond India. The target is <20-meter accuracy, and signals are in L5 and S band and can be used independently or in dual-frequency combinations. A second IRNSS-1B GEO satellite is scheduled to launch on April 4.
GAGAN: The Indian SBAS was commissioned and certified in February this year with a number of ground stations, redundant uplinks and two on-orbit GSAT 8 and 10 GEOs. Gagan is now qualified to provide RNP0.1 (navigation accuracy to 0.1 miles).
QZSS and Japan’s Space Policy
This session provided some detail on how changes in Japan’s Basic Space Law has lead to efforts to expand the use of space and derive further economic benefits that this provides.
Munich Highlights
A collection of examples of Bavarian GNSS innovations followed in a very interesting session led off by an overview of Business Incubation Centers and their collaboration with government agencies and research centers. Small business start-ups are apparently encouraged to apply during four annual time-slots, and receive two years’ incubation support and cash incentives. This has lead to 81 new ventures and has apparently been the source of the 1,000 new jobs mentioned by the Minister of Economic Affairs. The annual European Satellite Navigation Competition and Galileo Masters competition have also generated a whole bunch of ideas and concepts (8,000), some of which have found support through this incubation process.
Airbus Defence gave a short overview of the testing work it accomplished in supporting the first Galileo fix and has prepared several vehicle test platforms, ready to take the next phase of Galileo testing to the streets in realistic, real-world environments.
DLR provided insights into a number of its activities, namely:
Iono mapping
Signal distortion
Multipath
Jammer mitigation – adaptive antenna and processing
GNSS repeaters – how they can become unintentional jammers
Spoofer and Multipath inbvestigations
Antenna designs
GNSS evolution – Maser and clock combination benefits
Army University of Munich discussed radio science experiments in the Solar System and experiments using Mars Express (above) in polar orbit around Mars and resulting measurements of the moon Phobos. Internal and external outreach efforts with numerous organizations were also mentioned.
IFEN provided more down-to-Earth information on the on-going activities at the GATE ground-based pseudolite range, which has enabled realistic outdoors testing of Galileo receivers, well in advance of signals from orbiting satellites. Recent testing has now been able to include the four operating Galileo SVs on orbit with GATE pseudolite signals. GATE will continue to evolve over the next few years to keep up as more Galileo orbital signals come on-line.
Fraunhofer presented information on its 40-channel GPS/Galileo/GLONASS chip-receiver (above) – claiming 1-meter accuracy, low-cost, robust reliable position solution, small form-factor and low-power. Following PRS test-bed development efforts, Fraunhofer has now received a contract to also deliver 20 pre-operational Galileo PRS receivers for use in initial pilot projects.
GNSS Interference
Vidal Ashkenazi, in his inimitable form, lead a panel discussion on interference, jamming (in particular Personal Privacy Devices, or PPD) and spoofing, and coaxed his panel members to provide a whole bunch of information on what’s being done, mitigation capabilities and potential enforcement. Unlike all the other sessions, Vidal’s panel members didn’t use presentations, but rather responded to wide-ranging questions on the subject from the session chair.
David Turner, representing the U.S. State Department, indicated that the ICG will meet shortly in Geneva hosted by the International Telecommunication Union (ITU) to focus on interference, jamming and mitigation. The recourse that nations have for use of PPDs by their people is the law — jammers are illegal, sale and purchase of them is illegal — however, Internet sales are very difficult to police. So detection and mitigation are required to find and shut them down. Dave’s presentation on the GPS.gov website indicates that the ICG is working on an education program for states to inform about GNSS sensitivity to interference and the threat to critical infrastructure if they are allowed to operate. The ICG also has a task force on detection, reporting and systems development.
ISRO indicated that PPD jammers in India are restricted, but permitted for gatherings such as at churches where personal safety may be an issue. Ground-based detection is needed, as well as stronger legal protection that may well prohibit use of PPDs altogether.
Japan Aerospace Exploration Agency (JAXA) indicated that it is working on “signal proofing” for QZSS.
BeiDou said it is building a monitor network in China that will detect jamming.
There was a general discussion on whether receiver manufacturers should be mandated to make receivers that are resilient to jamming – many thought that there have already been significant advances in that direction by manufacturers. The normal approach would be to develop requirements with industry, agency and user inputs, publish them, and call up the requirements in equipment specifications. In the U.S., the Department of Homeland Security is seeking an approach to detection and location.
Legal Impacts of Personal Privacy Devices (PPDs)
While the audience may have had high hopes that the legal eagles could come up with some magic prevention and prosecution solution, the next session was more of a legal background briefing without any concrete conclusions (quite similar to other discussions I’ve had with some lawyers in the past, actually).
The first briefing was from the European Commission/European Union, who indicated that the EU doesn’t own the frequency rights to Galileo (Oh Oh…). They have to operate through a member state, which gets the rights through the International Telecommunication Union (ITU) and then licenses use to the EU — the bottom line being that EU enforcement of jamming protection laws maybe be difficult, as the legal framework only exists at the national level for each state. The EU is trying to get recognition under another class of ITU membership.
EU regulations were presented that state that GNSS re-transmitters can only be operated legally by governments or government contractors. Or can be used indoors for indoor navigation, but only for emergency services at fixed sites which are pre-approved. Pseudolites can only be operated indoors, and there should be no interference to other systems. Jammers are forbidden and cannot be placed on the market for sale.
Eurocontrol had a lot to say about the impact on aviation navigation infrastructure and receivers on aircraft. Existing ground nav aids have limitations, the worldwide equipment infrastructure is becoming quite old — aviation has generally moved away to GNSS and inertial based navigation and uses ground navaids as backup. There is a conflict between regulating GNSS heavily for aviation and how people want to use it in the commercial world. We may have to consider a trade-off between heavily restricted GNSS operations, and wide open commercial GNSS applications.
David Sobel, from Electronic Frontier Foundation in the U.S., presented the contrary case for individual privacy. His argument is that sale of tracking devices is unregulated and can readily be purchased, so people may presumably use them to track others, thereby infringing their privacy. So why shouldn’t people be able to “defend their privacy” by use of PPDs?
Say an employer insists that a vehicle you are driving have a tracking device so he knows where you are. Isn’t the driver also justified in trying to protect his privacy? Since the police in the U.S. can no longer place tracking equipment on suspect vehicles without a warrant, tracking appears to be down to private individuals or companies, who it would appear, have the legal ability to attach tracking devices under most circumstances. So the argument goes that if people have a legitimate concern about privacy, there should be acceptable provisions to allow them to disrupt tracking.
If there is a service such as road tolling, there is an incentive for people to avoid these costs. So systems should be robust enough to avoid disruption. Enforcement is a problem — should police chase people they suspect have jammers, or should they rather chase criminals or help and protect citizens? Mitigation systems need testing, so to test these systems there has to be jamming transmission — which needs to be controlled and regulated. Restricting the import of bad devices into a country might be desired, but the manufacturing countries don’t tend to want to restrict exports as exports help their economy. Again, the argument seems to be that of personal privacy over potential risks and damages to society.
No solutions, but a healthy discussion of views from a legal perspective.
Precise Point Positioning (PPP)
The group discussing PPP options consisted of the GSA (charged with exploitation of Galileo services), several principle industry service providers of PPP, and the federal agency, which provides PPP-like services in Germany.
The GSA presented its ideas concerning the provision of high-accuracy PPP corrections over the Galileo E6 signal – the so-called Commercial Service (CS). The intent, however, would not be to disrupt the commercial marketplace. Nevertheless, GSA is proposing a public-funded service to be sold to users within a market that is already well served by commercial worldwide service providers who charge users for cm-level PPP service.
And while Trimble made a polite presentation on the many levels of capabilities of its TerraSat services, as did Veripos and to some extent Fugro, it was clear that the commercial providers are not eager to find competition in their market from a government entity. NovAtel also chimed in on this conflict as it will be involved in Veripos/TerraStar, following its acquisition by Hexagon. Fugro appeared to be interested in acquiring rights to distribute CS on behalf of GSA.
The German Federal agency promoted open data, source and standards from the IGS network to which it contributes: IGS is supported by numerous national agencies around the world. Orbit and clock PPP service is available 24/7 from multiple sources. However, the service is offered on a best efforts basis without a service guarantee, and cannot achieve the accuracies or convergence times of commercial services.
I talked subsequently with Michael Ritter, CEO of NovAtel, to learn the background to the Veripos/TerraStar acquisition. It’s clear that providing PPP services means added value to NovAtel when they sell receivers with PPP capability, so they will quickly discontinue offering Omnistar subscriptions and will shortly launch NovAtel Correct, offering Veripos (marine) and TerraStar (land) PPP subscription services. NovAtel is making significant inroads in the agriculture segment, and they see PPP service as an essential element of this and other businesses. The acquisition was worth something on the order of $200 million, so there is a vested interest in making these services pay and discouraging GSA entry into this market. Veripos will continue supplying other GNSS OEM receiver manufacturers — notably Septentrio, who use TerraStar services, now also NovAtel, and potentially another major GNSS manufacturer.
Future of GNSS in User Segment
Chaired by Greg Turetzky of Intel, this session opened the third day of the Summit. The presenters offered their concepts for current and future GNSS equipment and systems.
Stanford University outlined its work with FAA on an alternate PNT system to be used as a back-up to GNSS. It used to be that GNSS systems were designed to overcome space-weather effects and faults in equipment design or manufacture — nowadays, there are “bad guys” out there and we need to “protect, toughen and augment” these systems. Antennas can be built that impart a specific signature to the signals they transmit, and this may aid in finding and prosecuting the bad guys, but the main focus of work is development of a hybrid system using Distance Measuring Equipment (DME) and a pseudolite.
Tests have demonstrated good performance, and these prototype efforts could lead to aviation requirements (MOPS) development by 2018 and deployment by 2020.
Septentrio has been involved in Galileo since it began and was the first company with Galileo receivers. Nowadays, they have receivers fielded in multiple commercial applications, including machine control, maritime, aviation, automation, and measurement, delivering accuracies from a meter down to a centimeter. They will add E6 to their AsteRx family of multiple-channel, multi-frequency, multi-constellation receivers, and have developed a number of hardware and software mitigation techniques to combat jamming, interference and multipath, and to integrate receivers with inertial units for aiding.
Furuno is interested in resilient PNT for marine applications, and has examined the use of eLoran as an alternative to GPS, but has moved towards a system of radar beacons that detect radar pulses from passing ships and transmit their positions, enabling position determination. In tests, accuracies of around 2 meters have been obtained with two beacons.
Quascom’s approach is to add firewalls inside receivers, which toughen the processing and prevent distortion of position information. Quascom believes this will be necessary until authentication can be added into the GNSS system itself, so that any data received is validated and is known to be good.
Chris Rizos from the University of New South Wales, Australia, drew attention to the “holes” that exist in GNSS, and reviewed a number of possible “Band-Aid” fixes, such as Wi-Fi especially for indoor location. However, his solution seems to be to establish terrestrial networks transmitting GNSS-like signals.
Eurocontrol indicated that aircraft currently use inertial and DME extensively as a back-up to GNSS navigation. By 2030, there will be multiple constellations, and dual-frequency use should become commonplace in aviation, so GNSS navigation should be much more robust. Aircraft approaches are required to be in conformance with Required Navigation Performance (RNP), so would it be possible to develop RNP procedures for DME and inertial to be used as back-up during approaches in the event GNSS is disrupted?
To conclude the session, Airbus provided a “starter course” overview on inertial systems – how they work, the range of different types available, what they can achieve, costs, strengths and weaknesses and integration with GNSS.
The summit continued with subsequent sessions on:
Space technologies and users
GNSS monitoring of Earth and disaster management
Copernicus – Earth Observation
GNSS Education
Unfortunately, my deadline didn’t allow me to attend these equally interesting presentations.
There is also a manufacturers’ exhibit area at the summit that just fits into a couple of corridors near the main hall – around 20 booths. I talked with several of the manufacturers, including Spirent who has launched its latest GSS9000 multi-frequency-constellation simulator, with a four-fold increase in system iteration rate over the previous model. Exhibitors appeared to be pleased to be at the summit and by the level of interest shown by the attendees.
So, as this year’s Munich Summit concludes, where does this leave us? We’ve learned some new things about several GNSS topics and heard some interesting new concepts. Europe appears to be now focused on users and applications, to ensure there is market growth and use of Galileo. What stands out for me is the contrast between how European governments go about GNSS and how North America and the commercial world does the same thing without as much direct influence. This is nothing new, of course, it’s just the European way…
Applied EM’s anti-jam GPS antenna, AJGPS045, has achieved a four-channel Controlled Radiation Pattern Antenna (CRPA) in a very small size, weight and power (SWAP) particularly suitable for airborne platforms. Its footprint is the same as a standard GPS Fixed Radiation Pattern Antenna (FRPA), the FRPA-3.
This is a key enabler to bringing greatly improved anti-jam performance to smaller platforms and to GPS-equipped platforms that have inadequate anti-jam capability.
When integrated with appropriate four-channel antenna electronics and a military GPS receiver, the AJGPS045 enables L1 and L2 anti-jam performance of typically >80 dB. This is achieved with a passive compact antenna (.7” x 4.6” x 4.6”) that weighs 9 oz.
As the tragedy of Malaysia Airlines Flight 370 riveted our attention, many sprang into action. More than two million volunteers scoured online satellite images for signs of the plane via Tomnod, a crowdsourcing project of DigitalGlobe.
Volunteers like Robert Wilkinson are asked to view satellite photos and tag any signs of wreckage, rafts, oil spills and other objects that may be of interest. “It took me the first hour to understand that I was looking at waves or tidal pools rather than debris or anything useful to the search,” said Wilkinson. “After that, I might have seen one or two things that I couldn’t explain, but I tagged them appropriately.”
All images that are tagged are reviewed by special algorithms before being viewed by experts. Tomnod reported that more than 650,000 objects had been tagged, and the maps had been viewed more than 98 million times.
Calls on Flight 370. This month, the Internet was full of questions about mobile communications and the missing Malaysia airplane. People didn’t understand why passengers on board the flight hadn’t made mobile emergency calls. On September 11, 2001, it was widely recalled, some passengers were able to make phone calls from the hijacked planes. Flight 370 was likely too high or going too fast to enable phones to register with cell towers. Experts say that planes flying above 5-10,000 feet would have difficulty making connections. Radar analysis estimated that the plane may have been flying as low as 12,000 feet or as high as 45,000 feet. On 9/11, passengers made calls when the plane was low or used satellite air phones available in business class.
GPS and Football. Security at places where large crowds congregate is always a concern. At last month’s Super Bowl, GPS devices tracked and monitored the team vehicles. To protect the GPS, a product from Exelis was used to detect and locate GPS interference sources to protect critical GPS signal-dependent infrastructure. Eight sensors were positioned in an array pattern to detect and locate any jamming sources.
Lost in Space. Google’s Project Tango is showcasing a prototype phone brimming with software and sensors that creates a 3D map of the environment. A select group of developers has been given the device and are expected to create innovative applications, including navigation by sight. We do know that one of these devices will be heading to the International Space Station and will be part of a project to enable robots to explore the inside and outside of the craft. The terrestrial uses of the device will include being able to map the interior of a house (the sofa goes where?), navigate through complicated buildings, provide accessibility for those with impaired vision, and emergency response. Project Tango may find interesting uses with 3D printing, which is riding a wave of interest.
GPS and LED Lights. Philips has been demonstrating an indoor location-based shopping service based on location positioning from LED lighting infrastructure. The system works by using lighting fixtures that form a dense network that not only provides light, but also acts as a positioning grid. Each fixture is identifiable and able to communicate its position to an app on a shopper’s smart device. ByteLight is another company with LED indoor location technology. Wi-Fi and Bluetooth low-energy (BLE) beacons are more established for indoor positioning.
Truck Market on the Move. Market demand remains strong for mobile resource management (MRM) devices, particularly among local fleets, reports C.J. Driscoll & Associates. “Manufacturers of light and heavy commercial vehicles are becoming increasing involved with telematics,” says Clem Driscoll. “Heavy truck manufacturers are primarily focused on enabling remote vehicle diagnostics.” Many of the large MRM companies are establishing added offices around the world.
Awkward Timing. INRIX is launching Russia’s first comprehensive traffic information and driver services platform. Russia has many challenges including difficult traffic conditions. The service, available on Audi cars, was developed through an exclusive partnership with Russia’s navigation services provider cdcom. INRIX XD Traffic in Russia provides real-time traffic and incident information covering more than 236,000 kilometers of roadways across 55 cities.
Nucleus of Four Now Operational: It “Works, and Works Well”
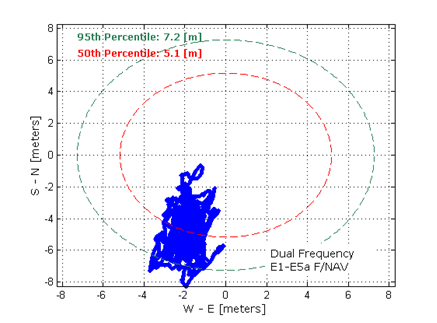
Dual-frequency Galileo positioning performance during the In-Orbit Validation phase: positioning accuracy is an average 8 m horizontal and 9 m vertical (95% of the time). Its average timing accuracy is 10 nanoseconds on average. Plot courtesy of ESA.
“IOV was required to demonstrate that the future performance that we want to meet when the system is deployed is effectively reachable,” said Sylvain Loddo, ESA’s Galileo Ground Segment manager. “It was an intermediate step with a reduced part of the system to effectively give evidence that we are on track.”
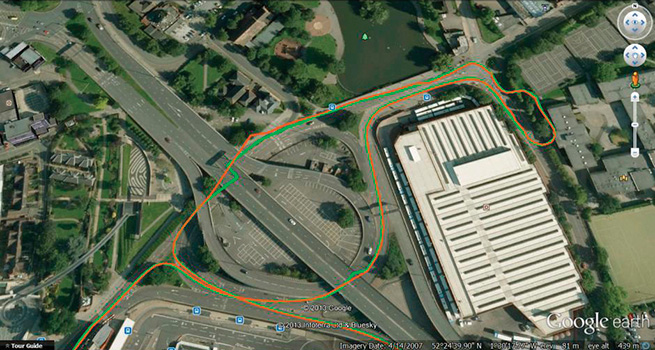
Following a March 2013 first determination of a ground location, jointly by Galileo’s space and ground segments, program managers undertook a wide variety of tests all across Europe.
“More than 10,000 kilometers were driven by test vehicles in the process of picking up signals, along with pedestrian and fixed receiver testing. Many terabytes of IOV data were gathered in all,” said Marco Falcone, ESA’s Galileo System manager.
According to ESA’s elaboration on the test results, the system has proved itself capable of solely performing positioning fixes across the planet.
Galileo’s observed dual-frequency positioning accuracy is an average of 8 meters horizontal and 9 meters vertical, 95 percent of the time. Its average timing accuracy is 10 billionths of a second. Its performance is expected to improve as more satellites are launched and ground stations come on line.
For Galileo’s search-and-rescue function — operating as part of the existing international Cospas–Sarsat programme — 77 percent of simulated distress locations can be pinpointed within 2 kilometers, and 95 percent within 5 kilometers. All alerts are detected and forwarded to the Mission Control Centre within a minute and a half, compared to a design requirement of 10 minutes.
“Europe has proven with IOV that in terms of performance we are at a par with the best international systems of navigation in the world,” said Didier Faivre, ESA director of Galileo and Navigation-related Activities.
Historically Speaking. In a February 2013 GPS World article, Peter Steigenberger, Urs Hugentobler, and Oliver Montenbruck discussed Galileo-only positioning. “Using an ionosphere-free dual-frequency linear combination of pseudorange measurements on the Galileo E1 and E5a frequencies, the position of the TUME reference station [at the Technische Universität München (TUM) in Munich, Germany] could be determined with a 3D position error of less than 1.5 meters,’” the authors said.
Crystal Ball Gazing. The next two Galileo satellites, of the full operational capability (FOC) class, currently complete their testing for flight clearance at ESA’s ESTEC facility.
Six such satellites are destined to rise into space in 2014, according to ESA’s master plan. Should all those launches occur as scheduled, Galileo’s initial services could start by the end of the year.
GNSS Vulnerable: What to Do?
Too Much Sensitivity, Not Enough Robustness, Says Parkinson
Brad Parkinson, the founding architect of GPS, told a UK conference that the system needs to be made more robust to ensure worldwide availability of services to users. His concerns over GPS availability relate to threats such as the loss of authorized frequency spectrum (implicitly creating licensed jammers), space weather due to hyperactive ionospheric conditions, and deliberate or inadvertent jamming of GPS signals.
He warned that GPS is more vulnerable to sabotage or disruption than ever before, and charged that politicians and security chiefs are ignoring the risk. Western governments are “in their infancy in recognizing the problem,” he remarked further in an interview with London’s Financial Times. “[In the United States] I don’t know anyone that is really in charge of it. The Department of Homeland Security should be [but] … they don’t have any people that understand it very well. They’ve got one person without any budget to speak of.”
He also warned that Europe’s €5 billion Galileo system is equally at risk.
Parkinson proposed a three-stage program to:
Protect (legally) the signal and physically eliminate jamming sources;
Toughen the GPS/Galileo receiver’s resistance to interference;
Augment the GPS signals with other satellites or with ground-based transmitters such as eLoran.
To support his proposal, Parkinson stated, “The number one need for all GPS or Galileo users is availability. Over the years, manufacturers of signal receiver technologies have focused too much on sensitivity and not enough on resilience or robustness. The maritime industry is a particular concern where users have taken GPS for granted. They must increase preparedness and backups as they do in aviation or other GNSS-using industries.
“Even today, most ships have only GPS and the vision of their crew to guide them when approaching harbors. As you can see from today’s conference, there are a wealth of solutions to toughen and back up GPS, many of which are not technologically difficult nor expensive, but still their adoption in sectors such as global shipping is certainly not adequate.”
As part of his protection program, Parkinson urged that penalties for jamming GPS networks be coordinated worldwide. “In Australia, if you cause interference likely to cause prejudice to the safe conduct of a vessel, it’s five years in the jug [jail] and $850,000.” Contrasting this with a U.S. case that may simply impose a forfeiture of the culprit’s jamming device, Parkinson added, “I’m calling for the community of nations to move to the Aussie-type penalties.”
In the toughening regard, Parkinson alluded to integration of GPS data with information derived from an inertial positioning system. “If you combine all of these things, a good set should be able to fly within 1 kilometer of a jammer with a 10-kilometer range,” said Parkinson. “That’s what I call toughening.”
Parkinson made his remarks as the keynote speech at GNSS Vulnerabilities and Resilient PNT 2014, hosted by the Royal Institute of Navigation. He will also deliver the keynote address, “Assured PNT: Assured World Economic Benefits,” for the European Navigation Conference on April 15 in The Netherlands.
Russia will deploy as many as seven ground monitoring and augmentation stations for GLONASS outside its national boundaries. GLONASS/GNSS Forum Association Executive Director Vladimir Klimov stated that “It is planned to deploy about six or seven stations on foreign territories this year.” Negotiations for the stations are now taking place with foreign nations.
Currently, there are 46 GLONASS ground stations on Russian territory, eight in neighboring countries, three in Antarctica, and one in Brazil. The United States recently spurned, with some Congressional trumpeting, a Russian tender to site one of the ground stations on U.S. soil.
New Instrument in Space. In mid-February, the most recent GLONASS-M satellite traveled to the Plesetsk cosmodrome for a probable mid-March launch. GLONASS-M 54 will carry a high-accuracy thermal stabilization unit, installed on the spacecraft for testing and flight qualification. The next-generation K-class of GLONASS spacecraft will loft this device to provide increased positioning accuracy.
Five GLONASS-M craft are planned for launch in 2014, in one triple and two single launches.
The design and verification of a new class of portable wideband record-and-playback system considers the relative merits and limitations of both simulator and record/replay approaches. The authors also discuss the benefits of the different test approaches to the development and characterization of various GNSS receiver types.
By Steve Hickling and Tony Haddrell
As new GNSS systems become available, and users take receivers to ever more challenging environments, the need for repetitive and repeatable testing during development grows ever stronger. Simulators have traditionally demonstrated performance and repeatability in the laboratory environment, and this approach remains the only option for planned signals not yet broadcast from space. However, this approach is becoming more complex as the number of GNSS signals and their reception environments increase.
Another way of testing receivers is through field trials. This allows investigation of conditions difficult to simulate, such as multiple reflections and interferers. These environments, however, are time-varying, and thus not repeatable in the true sense. Therefore, proper comparisons can only be made by assessing all competing receivers in the same trial, and any performance anomalies seen cannot necessarily be tracked down by returning to the same location at some point in the future. Furthermore, developers would like to see for themselves any such anomalies and try to understand and correct them, but it is not always desirable or practical (and certainly not economical) to put development engineers in locations scattered all over the globe.
To tackle this problem, GNSS signal record-and-replay capability is gaining acceptance as a practical tool for recording a signal environment at a single point in time and replaying at will. In real terms this means a device must receive the radio signals from the GNSS satellites, reduce them to a form suitable for storage, and then recreate signals from the stored data in a manner that makes them look completely real to any receiver under test or development.
Some receiver manufacturers developed their own capability to do this. Early devices were of necessity restricted in the signals they could handle and store, limited both by budget and available technologies. The basic problems are the amount of data to be stored in real time and the ability to recover it in real time. Even the GPS L1-only low bandwidth C/A code requires at least 2 Mbytes per single second of recording, or more than 100 Mbytes per minute.
Fortunately, with digital storage technology advances, we can now make use of higher storage capacities (1 TByte of storage is readily available at reasonable cost) and also higher write/read bandwidths (100 MBytes per second is realistic). All we need is some hardware and a processor that can handle the data rates.
Once we have our wanted signals reduced to some form of digital representation, we can simply store and retrieve them at will, handling the recordings as simple, if somewhat large, data files. This allows file distribution between equipments, and a split between making the recording in the field and replaying it in the laboratory. In fact, many manufacturers have dedicated field recording teams who send the files back to the engineers interested in the signal environments.
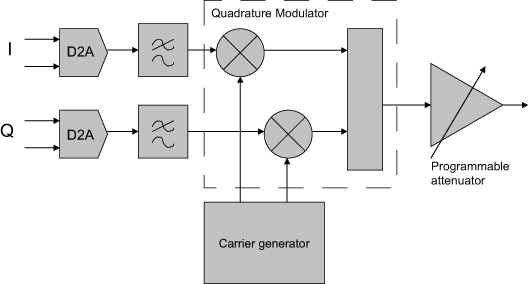
Replaying the signals is in some ways similar to generating simulated signals. In both cases, the starting point is digital data, on the one hand recorded in the field, on the other hand calculated by mathematical algorithms using the scenario specified in the simulator. In both cases the signal is created by generating radio frequency (RF) carriers and modulating them according to the GNSS signal formats.
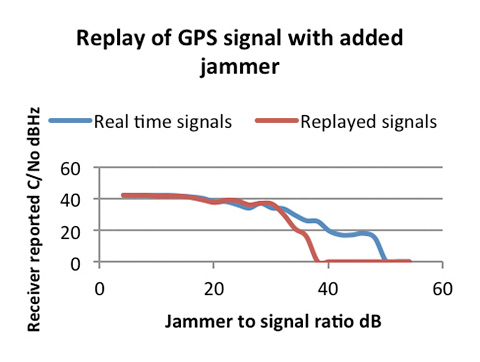
Contrast of Two Approaches. None of the characteristics of the record/replay device replace the functionality of the simulator; in fact, both are valid tools for development and testing. For instance, it is not possible with a record/replay device to manipulate individual satellite signals, nor to introduce specific errors in the radio signals. Equally, it is not really possible with a simulator to recreate a particular physical environment made up of many reflected signals, jammers, manmade noise, and moving scenery. With a simulator, the user has control over the power of the received satellite signal, whereas in the recorder the entire signal-to-noise ratio observed at the point of reception has been recorded, and the user can only control the amplitude of the entire noise plus signal.
Permanent Signal Monitoring
One other aspect of raw signal recording lies outside the receiver testing topic, but is of interest for GNSS signal monitoring. It uses the ability to record GNSS signals all of the time, in this case from a good signal environment, and then to retain any time spans where an anomaly in the signals has been detected by a monitor receiver. This is comparable to recording security CCTV pictures, where we expect nearly all of the resulting files to be redundant, but can retain the interesting bits to replay over and over for further analysis. For example, if it is known that a given timing receiver installation suffers periodic loss of lock, it is possible to make a recording using the loss of lock to signpost the interesting region in much the same way as a reverse trigger on an oscilloscope.
Limitations and Compromises
The sheer function of recording GNSS signals off-air has some built-in limitations. First, the signal recorded represents only a snapshot of the environment, although numerous recordings can be made at, say, busy and quiet times, day and night, etc. This is really a reversal of the “non repeatability” aspect of measuring performance in a particular location. In the recording sense, we only get repeatability, with no guarantee that the scenario captured represents worst case conditions. Thus, going back to the location in the future may or may not provide similar results.
In addition to this, there are some signal processing aspects that limit the fidelity of the replayed signals. The first is that any recorder must have an external GNSS antenna and a GNSS receiver front-end built in, and this combination will receive both the satellite signals and thermal noise. The level of the noise is much higher than that of the signals if we don’t do any correlation related processing, and the receiver will contribute some more noise of its own (the noise figure of the system). The second aspect is that in downconverting the radio signals to a usable frequency for sampling and storage, the recorder must use some frequency reference of its own, which will contribute some frequency uncertainty and some phase noise (or jitter on the frequency). The final aspect is the digitization of the downconverted signal to get it into a suitable form for manipulation and storage. Since we are essentially sampling noise here (with the GNSS signal buried in it) we need to look at fidelity in reproduction of the noise during playback, and the effect of any signal (a jammer or interferer) that is above the amplitude of the noise. In analyzing this last aspect, we may include the effect of any automatic gain control (AGC) used to present the correct amplitude signal to the analog to digital (A2D) converter.
A New Simulation Requirement
We wanted to create a much more comprehensive and flexible device than hitherto available, going part way towards the much more general (and expensive) instrumentation recorders that are currently the only alternative.
The requirement is for a flexible, self-contained device that can be easily carried or transported for recording purposes, so having an internal battery and built-in control functionality, and simultaneously a device that fits neatly into a networked and externally controlled laboratory environment.
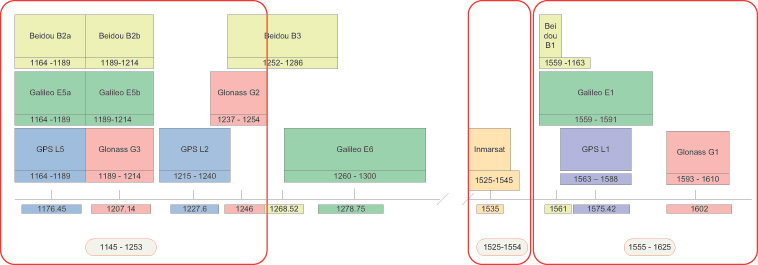
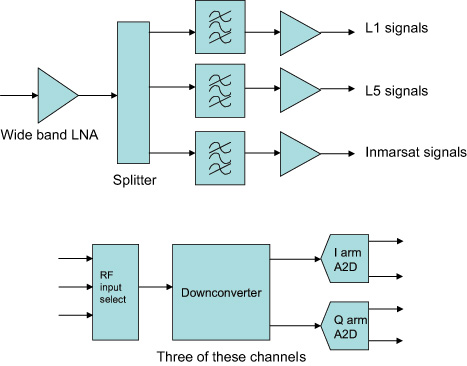
The first approach was to cover all of the possible GNSS frequency bands, although as more are added with time, we realized that this needed to be moderated somewhat. So the product covers L1, L2, L5 and their derivatives for the differing GNSS systems GPS, GLONASS, Galileo, and BeiDou, and also the Inmarsat commercial band to cover the proprietary augmentation signals used by many high-accuracy receivers (see Figure 1, red outlines).
FIGURE 1. Frequency bands, outlined in red, supported by the new record-and-replay device.
The next decision was what bandwidths to allow at each frequency, and how much of this bandwidth could be covered at once. The limitations here are driven by the data storage requirements of the signals being recorded, and the speed that they can be written to disk. The resulting solution allows bandwidths (BW) of up to 30 MHz at each frequency, and any three such bandwidths to be recorded at once. Physically, this is implemented with three channels with the ability to record any of the available frequencies or bandwidths. The user has, therefore, flexibility to set up recording for his particular needs, which may be just L1 covering BeiDou, GPS, Galileo, and GLONASS, or an L1,L2,L5, combination for a survey type application.
Of course, there are always requests for more capability, and we envisaged early on the ability to stack two devices to give six channels of 30-MHz BW for recording, say, GPS/Galileo and GLONASS at L1, GPS and GLONASS at L2, Galileo/GPS at L5, and an Inmarsat data carrier. See later for how this is achieved.
The whole product has to fit in a portable box with enough battery power for more than one-hour field campaigns, and also be capable of running from mains or vehicle power. The associated antenna needs to cover all of the frequency bands. Figure 2 shows the end result in its standalone configuration.
Figure 2. Portable solution for recording.
One additional requirement was placed upon the design, and that is the ability to record and replay non-GNSS data simultaneously with the GNSS signals, and reproduce them, if desired, in synchronism with the replayed signals. This allows time ticks, events, assistance data, sensor data, or even video to be stored and replayed along with the raw signals.
Architecture and Implementation
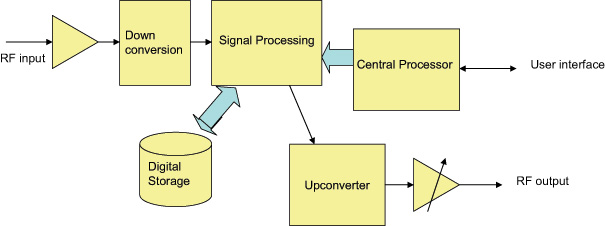
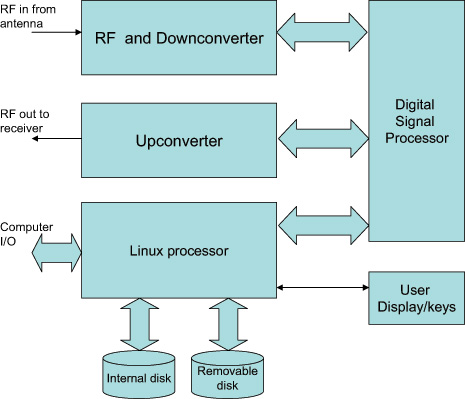
The new record-and-replay device uses a fast computer running the Linux operating system as its control center and storage/retrieval engine. Dedicated hardware is used to format or recover the raw data, and this has access directly to the computer bus to minimize the delays in writing or reading the mass storage, which in this case is a solid state hard drive (SSD). The overall architecture is shown in Figure 3.
Figure 3. Concept-level architecture.
The signal recording capability hinges around the RF planning, which has the task of supplying the necessary flexibility without adding more than minimal signal degradation.
For the RF functionality, the device contains a broadband front end and a three-channel RF amplifier (L1, Imarsat, and L2/L5), filtering the signal down to reasonable bandwidths for later downconversion. Three independent channels of downconversion to baseband I and Q analog signals have access to any of the RF channels and are based upon satellite TV technology architectures. The downconverters have baseband filters that can be commanded to a desired bandwidth by the control processor. This allows the use of narrower bandwidths where possible, allowing more recording time for a lower sampling rate. The baseband signals are sampled at 10 MHz or 30 MHz, paying attention to the Nyquist requirements for pre-digitisation filtering. Two bits for each of the I and Q signals are utilized for packing into the recorded file format. Figure 4 shows the arrangement.
Figure 4 . The RF architecture.
At this stage any additional synchronous data to be recorded, such as truth or assitance data, is inserted into the bit stream, and the data from all the channels in use is combined in a pre-determined format. Dedicated hardware is used for this, and large data buffers are provided to alleviate bottlenecks in sending data to the disks. Each file has an associated definition in a header, and contains synchronization data to allow the device to set up the replay path and recover the data bits in order to reproduce whatever combination was recorded. Note that resulting data files are given the same extension, regardless of content. Data files can be very big (at maximum bandwidth we record about 2.7 Gbytes per minute) and may be difficult to handle once recorded. To assist with this, the device has a second, removable SSD on board, allowing recorded files to be simply popped out of the caddy and shared with another device, or even mailed or couriered. The RF path for the replay consists again of three independent channels, able to generate any of the supported frequencies and modulate upon them the original signals recovered from the stored file. Once again, dedicated hardware and large buffers are needed to unpack the files and send the RF data to the correct channels or to the synchronous data outputs in the case of recorded digital data, as determined by the file header.
The data representing the recorded RF is converted back to analog form and filtered before being applied to modulators which regenerate the original channelized signals. Each channel has a programmable attenuator to “level” the amplitude, and the three channels are then combined together before passing through a common attenuator to provide user control over the replayed carrier to noise ratio (C/N0). Figure 5 shows the upconverter arrangement.
Figure 5. An upconverter channel.
All frequencies created within the device need to be traceable to a common reference. In addition, this reference needs to be at least as good as the reference in any receiver to be tested, since both its offset from true frequency and its rates of change will be superimposed on the replayed data. Many commercial-grade GNSS receivers (such as those used in mobile phone) are specifically designed to cope with poor oscillators, for instance a low-grade temperature controlled crystal oscillator (TCXO), whereas more professional receivers may expect a couple of orders of magnitude better performance. We decided, therefore, to include an ovenized oscillator (OCXO) for use both in record and playback modes. One challenge presented by this decision is that the oven is necessarily thirsty for power, and therefore a bigger battery is needed than would otherwise be the case.
The OCXO used is a 10.23-MHz component, thus allowing direct generation of the wanted GNSS frequencies using integer ratios and avoiding as much phase noise as possible in the various RF channels. A dedicated phase locked loop (PLL) generates a reference for output to other devices, and a 10-MHz input connector is provided to lock the OCXO to an external reference. These capabilities are utilized when combining two such devices, since we must have the same frequency reference in each. Apart from locking the two oscillators together, this configuration also needs time synchronization between the sampling in both devices, and this is achieved via an additional cable connected between the accessory connectors. Once time and frequency synchronized, the devices behave as a single six-channel unit, using external RF splitter/combiners for the RF connections.
Design Challenges
RF Total Bandwidth. The GNSS bands covered by the device range from the L5 band to the GLONASS L1 band, a total range of 480 MHz allowing for signal bandwidths. Table 1 shows the relevant bands.
Whilst the RF front end must be wide open to this range, assuming the use of a single RF input port, it is obviously necessary to provide bandwidth narrowing by filtering as soon as possible, to exclude jammers or carriers using the space between the GNSS bands, and to avoid the sheer noise power overwhelming the RF circuits. Examination of the supported GNSS services shows them essentially packed into two clusters of frequencies, which provide a convenient way of filtering down the RF input into two RF “channels.” This gets the total bandwidth down to about 180 MHz. Figure 1, the opening graphic for this article, shows the groupings. Beidou B3 and Galileo E6 are currently out of scope for this product, but will be supported in a later version.
The Inmarsat-supported signals are assigned their own RF path, since their structure is data modulated carriers, usually with low SNR. Elsewhere in the Inmarsat band there are more powerful carriers supporting comms traffic, which can “grab” the AGC and therefore cause loss of SNR during the digitization process. Hence this band is processed though its own RF path, maintaining as low a bandwidth as possible consistent with the frequency allocations of the various (proprietary) GNSS augmentation data carriers.
Tradeoffs. Throughput of the recording or replay paths is the performance limitation of the current architecture. Thus a lot of discussions and simulations concerning possible bandwidth, sampling rates, and bit depth tradeoffs was undertaken at the outset of the design. In addition, we needed to decide whether to sample signals at an IF frequency or at baseband. Trials were conducted to determine the real rates of disk access, which are different to the often quoted write and read speeds of computer interfaces.
The results of the trials and simulation led us to adopt a maximum average data rate to/from the storage system of 50 Mbytes/second, this being shown to be available over a period of many hours. Actually, at this rate we fill up a 1-Tbyte disk in about five hours.
To service the GNSS signal bandwidths of interest, again there are two groups of signals. This time we are looking at either the commercial signals (“open service signals” in some systems’ parlance) used by consumer-type receivers, which are relatively narrow band, and the military, high-accuracy, or resilient signals of interest to surveying and precision applications. Therefore, we offer two sampling rates, approximately 10 and 30 MHz, to avoid building large files where more than half of the bandwidth was of no interest to the user.
Next, we have to look at bit resolution. Given that we have generally a noise-like signal with Gaussian characteristics, if we were looking at digitizing at an intermediate frequency (IF), it can be shown that a 2-bit analog-to-digital converter (A2D) would be sufficient to keep the digitization losses to less than 1dB. Obviously, the fewer number of bits we need to store the better, commensurate with achieving the performance targets.
Frequency planning for all of the possible frequencies and bandwidths of interest is a complex task. The requirement here was to downconvert each signal of interest to a low IF suitable for digitizing, whilst having control of the bandwidth to eliminate unwanted signals and fulfill the Nyquist criterion. In addition, we wanted each channel to be isolated from the others even when the replay path involving the generation of the IF carriers was considered.
We therefore decided to downconvert to baseband for each channel, to avoid cross-contamination via the various IFs that would have to be generated for replay. In other words, we adopted an IF of zero Hz. This in turn means that the final bandwidth-determining filters are at baseband, and can readily be controlled by software means rather than having to switch RF paths. By downconverting into quadrature baseband channels, all stored signals are at the same (zero) IF, and crosstalk and imaging during upconversion is avoided.
Thus the A2D architecture of 2 bits in the inphase (I) and 2 bits in the quadrature (Q) arms of the downconverted signal was adopted. Doing the calculation in terms of stored data, we see that we can operate three channels inside our target storage bandwidth, with a margin left for other features such as storing video at the same time.
For 30M samples per second (SPS), each channel has 4 bits or 0.5 bytes
Therefore, for three channels the storage bandwidth is 0.5 * 3 * 30 MSPS, or 45 Mbytes/s
To keep the optimum A2D characteristics, the AGC is designed to adjust the signal amplitude at the converter to give a Gaussian response to the four states determined by the two bits in each arm. The AGC operates independently in each channel. Figure 6 shows the final architecture for the device in block diagram form.
Figure 6. Final architecture.
Real-Time Data Handling. Storage and retrieval of the digitized signals is carried out by dedicated hardware connected to the RF downconverter, the playback upconverter, and the main computer that “owns” the storage media. Large buffers allow the storage media to lag (record) and lead (playback) the real-time signals in time, and to take short breaks for housekeeping functions. Data is packed into a binary file according to a pre-determined sequence, which in turn is set by the number of channels and bandwidths in use. A file header is generated which contains all of the information necessary for reconstructing the data streams for replay. A synchronization sequence is added at the start of the file to allow recovery of the correct bits for each channel and each baseband quadrature arm, and to the correct timeslots for each component. Destroying the correct time reproduction is the most likely issue to cause faulty replay in any record/replay device. GNSS receivers don’t like discontinuous or slewing time!
This approach also allows the insertion of external digital data into the file. Providing the data processing hardware is aware of the individual bits into which this data is placed, digital data recorded at the same time as the raw signals may be regenerated synchronously during replay. Thus any data that is applied to a receiver in a real time trial can be available for the same trial any time after the event. Two streams of synchronous data can be recorded per channel potentially making six serial data streams per chassis available.
User Interfaces
A final challenge presents itself in the case of user interfaces. Although the operational options of the device are quite complex, there is a requirement to be able to capture field data with just the equipment itself and any necessary antenna setup. Consequently, the product has a display and control keys implemented on the front panel, allowing the user comprehensive access to the internal functions using a menu system and scrolling displays. Alternatively, for operation in a lab environment, a network connected user interface is specified, and this requirement is supported by a webserver running on the main processor in the device. Thus, simply opening a web browser and connecting to the device’s IP address allows full functional control.
In addition, connecting a mouse, keyboard, and monitor to the device allows access to the main processor, allowing the running of scripts thus providing full control of replays and receiver functions for running continuous tests in an automated laboratory environment. Using this approach, receiver modifications can be tested over many scenarios and locations many times each, to provide statistically relevant results, without taking up operator time. Remote monitoring is possible using the webserver.
Performance Testing
A range of tests and trials have been carried out to verify that the product meets its specifications, and to measure the performance in a number of real life scenarios.
Repeatability, Degradation, Attenuation. The first and most obvious thing to explore is the effect of the record and playback on signal-to-noise ratio. Since the RF circuits add some noise to the signal recorded, we would expect some degradation to take place here. Also, during replay, the receiver under test adds more noise, depending on its noise figure, although this should be the same as would be added when using “live” signals. Many receivers adjust for their noise figure when reporting C/N0 numbers (C/N0 is a signal to noise measurement normalized to a 1-Hz bandwidth and is the standard reported measurement for most GNSS receivers). However, by replaying back the recorded signal and noise at a higher level than would have been received in “live” conditions, we can eliminate almost all of the degradation. In live versus replayed tests for individual satellites using a JAVAD receiver, which allows us to test all of the supported bands and constellations, we found that replay is possible within ±1 dB of the original live signals. Replayed signals were about 10 dB above the original recorded level to achieve this, effectively swamping the receiver’s noise contribution.
An interesting aspect of controlling the C/N0 this way is the ability to attenuate the replayed signal and, therefore, increase the contribution of the test receiver’s noise figure. Thus, although the recorded C/N0 hasn’t changed, we can attenuate the replay level and use the receiver to add noise.
This process is not linear, and we obviously have to remove nearly all of the 10-dB excess to get started. The device keeps a table of attenuation vs C/N0 reduction, allowing the user to simply dial up the required C/N0 loss. Since this depends on the receiver noise figure, effects may differ slightly from receiver to receiver. Usefully the table is user definable allowing tailoring to a specific receiver.
Losses from Phase Noise, Other Factors. This category of degradation is more difficult to quantify, since the effects are on tracking and therefore range and phase measurement rather than signal to noise ratio. One way of looking at this is, therefore, to establish the positioning performance during live and replayed sessions, and measure the differences. This has some complexity, though, since putting the same signals into a receiver multiple times yields differing performance each time, meaning that we have to use some statistical analysis. Of course this isn’t possible on live signals, and is one reason why repeatable replayed signals are so important in developing GNSS receivers. Another aspect is the fact that some of the effects are differential among frequency bands (filter delays, for instance) and across bands as well (group delay) and also occur in the receiver under test, which will have been calibrated to mitigate its own contribution.
Figure 7 shows a comparison of static positioning for live and replayed signals using only GPS L1 and a 10-MHz sampling rate with an ST-Ericsson receiver, whilst Figure 8 is from a JAVAD receiver using all possible signals in live mode and GPS L1/L2 and GLONASS L1 in replay. In both cases the degradation is within 1 meter always, and much less than this when statistically analyzed.
Figure 7. Static position GPS L1 comparison: live left, replayed right.Figure 8. GPS L1/ L2 with GLONASS L1 comparison.
Another opportunity to measure the effects is to run a zero baseline phase solution, whereby the receiver is used as the “base station” when receiving live signals which are simultaneously recorded. During replay, the same receiver is used as the “rover” with RTK corrections coming from the previously captured live session. In this setup, therefore, we are really only measuring differences in the replayed and live signals, and the usual measurement limitations of the receiver.
Figure 9 shows the results of one such test, with the pseudorange and carrier phase residuals plotted. This was carried out using two devices in master/slave mode recording GPS L1, L2, L5, and GLONASS L1, L2. As can be seen, the residuals are within “normal” expectations and are measured as 0.42 m RMS for the pseudorange and 1mm RMS for the carrier phase.
Figure 9. Residuals from zero baseline replay.
Drive Test
One of the most common uses for the recorder is to capture the signals at a particular time in a chosen “difficult” environment, A number of representative trials were carried out and we were able to demonstrate consistent results and repeatability. In some cases, the replayed signals yield better performance than live ones, which of course is possible given the differing receiver responses per signal run.
Also, the more times a receivers sees the same time span, the more ephemeris and iono data it can build up, especially true of built up areas where data acquisition is difficult. Figure 10 shows a small section of the City of Coventry in the UK, where the green trace is the “live” plot and the replayed one is in orange. Much of this route is under roads or buildings.
Figure 10. Live and replayed drive around in Coventry.
Dynamic Range and Fidelity
When jamming signals are introduced, the dynamic range comes into play. The earlier discussion of the 2-bit I and 2-bit Q architecture is tested here as the performance of the AGC and A2D is critical in maintaining the fidelity of the GNSS signals in a jamming environment. Note that we are not addressing deliberate jamming here, any “controlled” jammers can be added with an RF mixer at replay. Instead, we are concerned with the everyday jamming environment encountered just about everywhere electronic equipment is deployed.
A test was carried out to determine the dynamic range of record/playback paths. A simulator was used as a GPS L1 signals source, and progressively larger jamming signal added via an RF power combiner. The resultant C/N0 in a test receiver was plotted using the live signals which were recorded at the same time. A subsequent replay of those signals was then plotted on top of the original C/N0s. The result is in Figure 11.
Figure 11. Results of the increasing jammer test.
As can be seen, with low jammer powers the real-time and replayed C/N0s track very closely. The ST-Ericsson receiver we used has some signal processing mitigation built in, and so only shows slow degradation as the jammer power is increased. In the real-time run, it was able to track satellites with the J/S ratio greater than 44 dB (and therefore >25 dB above the noise)
On the replayed line, we see the dynamic range limitations start to dominate the replayed signal when the J/S reaches about 30 dB, or 11 dB above the noise, which aligns well with the theoretical analysis of the digitization strategy. This range is sufficient for most environments encountered in real tests.
In Use and Additional Capabilities
With so much flexibility we find that users have a diverse range of applications for the device. These range from multi-constellation usage at L1 only, allowing BeiDou, Galileo, GLONASS, and GPS to be captured, to full six-channel recordings using GPS, GLONASS, and Galileo at L1, L2, and L5 along with an Inmarsat-based assistance channel. For the first time in this class of device, recording of the “military” bandwidth signals is possible. User feedback has been favorable, especially since the unit opens up new capabilities for receiver development and testing.
A small margin of recording bandwidth has been put to use with the ability to record video alongside the raw GNSS signals, and to replay it simultaneously. This allows developers not only to see the performance of their receiver in difficult signal environments, but also to gain a visual idea of the physical environment. Figure 12 shows a receiver control panel along with video pictures of the recorded environment.
Figure 12. GPS L1 and video synchronized replay
Conclusion
Early user feedback has validated the concept behind the device. Although the device will cover additional GNSS constellations and bands as they become operational, for the present the technology is stretched about as far as it can be consistent with the development of a timely and cost effective device. We will continue to address the compromises in the search for more performance, no doubt pushed by user demands.
Acknowledgment
The authors thank their colleagues at Integrated Navigation Systems and Spirent UK for support and access to design and user information.
Steve Hickling obtained his joint physics and electronics degree from the University of Birmingham. He is responsible for Spirent’s GNSS test solutions as lead product manager in the positioning business.
Tony Haddrell obtained his degree in physics at Imperial College, London, and is technical director at integrated Navigation Systems. He is a consultant to GNSS companies and a visiting lecturer at Nottingham University.
Too Much Sensitivity, Not Enough Robustness, Says Parkinson
Brad Parkinson, the founding architect of GPS, told a UK conference that the system needs to be made more robust to ensure worldwide availability of services to users. His concerns over GPS availability relate to threats such as the loss of authorized frequency spectrum (implicitly creating licensed jammers), space weather due to hyperactive ionospheric conditions, and deliberate or inadvertent jamming of GPS signals.
He warned that GPS is more vulnerable to sabotage or disruption than ever before, and charged that politicians and security chiefs are ignoring the risk. Western governments are “in their infancy in recognizing the problem,” he remarked further in an interview with London’s Financial Times. “[In the United States] I don’t know anyone that is really in charge of it. The Department of Homeland Security should be [but] … they don’t have any people that understand it very well. They’ve got one person without any budget to speak of.”
He also warned that Europe’s €5 billion Galileo system is equally at risk.
Parkinson proposed a three-stage program to:
Protect (legally) the signal and physically eliminate jamming sources;
Toughen the GPS/Galileo receiver’s resistance to interference;
Augment the GPS signals with other satellites or with ground-based transmitters such as eLoran.
To support his proposal, Parkinson stated, “The number one need for all GPS or Galileo users is availability. Over the years, manufacturers of signal receiver technologies have focused too much on sensitivity and not enough on resilience or robustness. The maritime industry is a particular concern where users have taken GPS for granted. They must increase preparedness and backups as they do in aviation or other GNSS using industries.
“Even today, most ships have only GPS and the vision of their crew to guide them when approaching harbours. As you can see from today’s conference there are a wealth of solutions to toughen and backup GPS, many of which are not technologically difficult nor expensive, but still their adoption in sectors such as global shipping is certainly not adequate.”
As part of his protection program, Parkinson urged that penalties for jamming GPS networks be coordinated worldwide. “In Australia, if you cause interference likely to cause prejudice to the safe conduct of a vessel, it’s five years in the jug [jail] and $850,000.” Contrasting this with a U.S. case that may simply impose a forfeiture of the culprit’s jamming device, Parkinson added, “I’m calling for the community of nations to move to the Aussie-type penalties.”
In the toughening regard, Parkinson alluded to integration of GPS data with information derived from an inertial positioning system. “If you combine all of these things, a good set should be able to fly within 1 kilometer of a jammer with a 10-kilometer range,” said Parkinson. “That’s what I call toughening.”
Parkinson made his remarks as the keynote speech at GNSS Vulnerabilities and Resilient PNT 2014, hosted by the Royal Institute of Navigation. He will also deliver the keynote address, “Assured PNT: Assured World Economic Benefits,” for the European Navigation Conference on April 15 in the Netherlands.
Spirent Communications, a testing navigation and positioning systems company, today announced the introduction of Spirent SimSAFE, a software solution that concurrently simulates legitimate Global Navigation Satellite System (GNSS) constellations and spoofed or hoax signals to evaluate receiver resilience and help develop counter measures. SimSAFE was developed in conjunction with Qascom, GNSS signal security and authentication experts.
As GNSS become increasingly embedded in modern infrastructure for application timing and device positioning, the opportunities for interference and spoofing attacks become greater, Spirent said. Hoax or spoofing attacks work by mimicking genuine GNSS signals, which mislead GNSS receivers. From mobile telephony to Internet banking, GNSS timing signals are used in many key systems, and yet there is no requirement on GNSS equipment to demonstrate any degree of robustness to block or even detect malicious attacks that disrupt performance. Often, affected receivers do not recognize when they are receiving fake signals and continue to operate normally, but provide false time or position information.
“GNSS signal vulnerability is becoming a significant issue,” said John Pottle, marketing director of Spirent’s Positioning Division. “SimSAFE is the first tool to help develop systems that will detect and counter spoofing attacks. This solution is unique in being able to provide a means of both emulating a spoof attack and monitoring a receiver under attack to evaluate mitigation strategies and countermeasures.”
SimSAFE is a fully controllable laboratory-based, non-radiated test solution to evaluate a receiver’s response to a wide range of spoofing attacks. The test tool generates simulated spoofing attacks that can be aligned with genuine signals from an antenna or locally generated “genuine” signals using a Spirent GNSS simulator. This allows users to simulate a wide range of sophisticated attacks, monitor the response of the receiver under attack and evaluate the effectiveness of proposed countermeasures to then improve resilience against such attacks.
screenshot: Spirent’s SimSAFE
In essence Spirent’s SimSAFE spoofing test bed does two things:
Generates simulated spoofing attacks where a Spirent RFCS is controlled to represent a hoax signal synchronized with a “genuine” signal which can be ambient GNSS or itself generated by simulation.
Monitors a GNSS receiver subject to simulated spoofing attack in order to evaluate and refine mitigation strategies or countermeasures.
The two principal applications of SimSAFE are:
The evaluation of the vulnerability of a user’s receiver when exposed to a wide range of simulated spoofing attacks.
The evaluation and refinement of spoofing mitigation techniques, signal authentication strategies or countermeasures. This work can be conducted using any receiver of the user’s choice; however, a range of receiver monitoring tools supplied with SimSAFE are enabled if the receiver supports Septentrio Binary File (SBF). A suitable Septentrio receiver is supplied in the standard configurations for this purpose.
In the wake of last month’s Expert Advice column on eLoran — “The Low Cost of Protecting America” by Dana Goward of the Resilient Navigation and Timing Foundation — come several positive comments and encouraging developments. Rather than rehearse all the arguments why we should care about this, I’ll repeat the one word that I heard most often in GNSS circles in 2013: jamming. Followed closely by: spoofing.
“I have been advocating strongly for reconsideration of the government’s domestic Loran decision for the last year or so,” writes one reader positioned on Washington’s Beltway, “and specifically working within the Department of Defense (DoD) to ensure it is aware of international developments for eLoran in the UK and South Korea, and the possibilities inherent in other former Loran chains.
“The DoD is beginning to recognize the value of eLoran as a complement to GPS, not only for international missions, but in cooperation with the departments of Transportation and Homeland Security for domestic critical infrastructure.”
Last fall, Don Jewell’s Defense PNT newsletter on the same subject drew this reply from another well-known expert:
“One of the key short-term actions is to prevent the decommissioned [Loran] sites from being sold off for subdivisions. These sites are a national treasure with unique properties: soil conductivity, water content, metal content, and more that are hugely important in siting low-frequency positioning systems. Those long-gone engineers of the 1940s and ’50s knew this and chose accordingly.”
Before last month’s issue appeared but after it had gone to press, President Obama signed the National Defense Authorization Act (NDAA) for 2014. It contained several favorable New Year’s auguries for positioners, navigators, and timers.The act evinced an acute awareness of the vulnerability of space systems to disruption. The act is also a law governing the land. Through it Congress requires the administration to, among other things, explain biennially in its “Space Protection Strategy” report exactly how, in the event space systems are disrupted, DOD and the intelligence community “plan to provide necessary national security capabilities through alternative space, airborne, or ground systems.”
Since said administration acted early in its first term to decommission Loran-C, the congressional directive is pointed.
The next big thing coming up on the GNSS international horizon takes place in Rotterdam, the Netherlands, April 15–17: the European Navigation Conference, ENC-GNSS 2014. It includes a track session on “eLoran and other Low-Frequency Systems,” and I’ll be there with pencil sharpened.
Brad Parkinson will give the ENC keynote, and he is on record as one of an august group of Institute for Defense Analyses experts who unanimously recommended that the existing Loran-C be greatly updated and modernized to eLoran. We should hear more from him on this subject amid the wharves, waterways, and docks of Europe’s largest port (world’s third busiest).
There’s barely room left to report the successful tests of Enhanced Differential Loran (eDLoran) by Dutch specialists Reelektronika: absolute accuracy of 5 meters in the North Sea and in the Rotterdam Europort harbor area.