New sensor provides easy-to-integrate, cost-effective, triple-redundant IMU hardware and software for guidance and navigation solutions in autonomous machines and vehicles
Photo: Aceinna
Aceinna has launched a new high-accuracy inertial measurement unit (IMU), the IMU383ZA. The sensor integrates triple-redundant, 3-axis micro-electromechanical system (MEMS) accelerometer and gyroscope sensors.
The IMU383ZA is an improved, pin-compatible version of Aceinna’s IMU381ZA. It offers high performance (1.3 deg/hr, 0.08 deg/root-hr) and a triple-redundant sensor architecture for ultra-high reliability.
The miniature module is factory-calibrated over the -40° C to +85° C industrial temperature range to provide consistent performance through extreme operating environments for a wide variety of applications.
Applications include automotive advanced driver-assistance systems (ADAS), autonomous systems, drones, robotics, agricultural, construction and other industrial machines.
The IMU383ZA provides a standard SPI bus for cost-effective board-to-board communications. Other features include advanced synchronization and a bootloader for field upgradeability.
Measuring 24 x 37 x 9.5 millimeters, the IMU383ZA integrates a triple-redundant architecture that — combined with the small, low-cost packaging — meet the challenging performance, reliability and cost requirements of the automotive market including the areas of autonomous vehicles, self-driving taxis/delivery vehicles, ADAS systems, electronic stability control and lane-keep assist applications.
The triple-redundant sensor architecture consists of three independent, 3-axis accelerometer and 3-axis gyros for excellent accuracy and reliability. By embedding a triple-redundant sensor array, the IMU383ZA uses Aceinna’s proprietary voting scheme to utilize only valid sensor data. Any defective sensor output or errant dataset will be ignored or de-rated in importance.
A roundup of recent products in the GNSS and inertial positioning industry from the April 2020 issue of GPS World magazine.
OEM
LPWA module
Collaborative IoT solution
Photo: Quectel
Quectel Wireless Solutions’ LPWA module BG95 is being integrated with Microsoft’s Azure Device software development kit (SDK). The BG95 cellular module is based on the Qualcomm 9205 LTE modem. The integration will provide direct and secure connections to the Azure IoT Hub and provide full support for Azure device management. Customers can connect their BG95 devices to the Microsoft Azure cloud where they can build, manage and deploy internet of things (IoT) solutions at scale, significantly accelerating time to market. The BG95 module is a highly integrated variant supporting integrated GNSS, Cat M1, Cat NB2 and EGPRS (also called edge). The module complies with 3GPP Release 14 and delivers improved capabilities in power consumption, data rates and hardware-based security.
The SARA-R422 product series of LTE-M/NB-IoT and EGPRS cellular modules now include GNSS variants for internet of things (IoT) data, devices and ecosystems. The SARA-R422M8S module is pre-integrated with the u-blox M8 GNSS receiver and a separate GNSS antenna interface. This provides highly reliable, accurate positioning data simultaneously with LTE communications. The module also supports hybrid positioning strategies, in which positioning data provided by satellite constellations is enhanced with data from the u-blox CellLocate service, ensuring that location data is always available everywhere. The SARA-R4 series is designed for a wide range of mission-critical IoT solutions such as connected healthcare, industrial monitoring, point of sale and vending terminals, tracking and telematics devices, as well as smart lighting solutions and building automation.
The new line of Sarbe search and rescue beacons. (Photo: Orolia)
Orolia has improved its Sarbe Evo search-and-rescue (SAR) beacon range line to deliver upgraded operational capabilities. The line offers new operational improvements to meet revised Cospas-Sarsat requirements in operating lifetime, location accuracy, voice signal management, integrated protocols, testability and maintenance. Also a focus of the upgrade was more robust and frequent GPS/GNSS position acquisition with the GPS, Galileo and GLONASS satellite constellations.
ADVA’s GNSS assurance solution could help companies dependent on satellite-based timing. (Photo: Business Wire)
ADVA’s GNSS assurance solution helps companies dependent on satellite-based timing. The centralized GNSS monitoring and assurance tool uses artificial intelligence and machine learning for comprehensive predictive maintenance. The customer-owned tool enables users to collect and analyze huge amounts of information from across the network to remotely identify issues and protect networks from GNSS vulnerabilities, including jamming and spoofing attacks. It also helps to identify GNSS obstruction issues, detect blind/poor spots that appear over time, and enable optimal antenna positioning. Built into ADVA’s Ensemble Controller network management suite with Sync Director, the solution enables customers to detect potential problems in advance and maintain the highest quality of network synchronization. It complements the limited distributed approach to GNSS assurance with a centralized global system, providing a boost to critical infrastructure now dependent on satellite-based timing.
The Locosys MC-1612-DG is a single-band multi-system with an ARM-based processor that supports GPS, GLONASS, Galileo, QZSS and SBAS. The embedded micro-electro-mechanical systems (MEMS) sensor is equipped with dead-reckoning software and provides six-axis accelerometer and gyroscope data. The extended Kalman filter algorithm combines GNSS and MEMS sensor data with a weighting function that relies on GNSS signal quality. In adverse GNSS conditions such as urban canyons, tunnels or parking garages, the dead-reckoning features boost accuracy with the software filling the gaps. It supports three-dimensional dead-reckoning and standard NMEA output, and has Flash memory, TCXO, RTC crystal, LNA and SAW filter.
The automotive-grade solid-state RS-LiDAR-M1 family has the performance advantages of traditional mechanical lidar, while meeting requirements for mass-produced vehicles. The RS-LiDAR-M1Smart is embedded with an artificial intelligence perception algorithm that transforms conventional 3D lidar sensors into a full data analysis and comprehension system, outputting semantic-level structured environment information in real time for autonomous vehicle decision making. The RS-LiDAR-M1Smart outputs two redundant channels of data: the original point cloud and the object list. The redundacy provides vehicles with a range of sensing results — dynamic, static, inside and outside the road. Also available is the RS-LiDAR-M1Simple.
The Vsx7 multi-frequency position and heading receiver is designed specifically for machine control and can be mounted by bolts or with magnets on heavy equipment. Paired with the Carlson A45 antennas, the Vsx7 features high-precision positioning in Athena RTK, Atlas L-band and SBAS and heading accuracy of up to .01 degrees. The whole Vsx7 system is designed to operate in harsh conditions from –40° F to +158° F. The Vsx7 is primarily used in the mining and construction industries, but can be used in similar industries with companion software, Carlson Grade. Field data can be collected and viewed in real time both at the machine with either the MC8 or MC10 control box as well as in the office with Carlson Command.
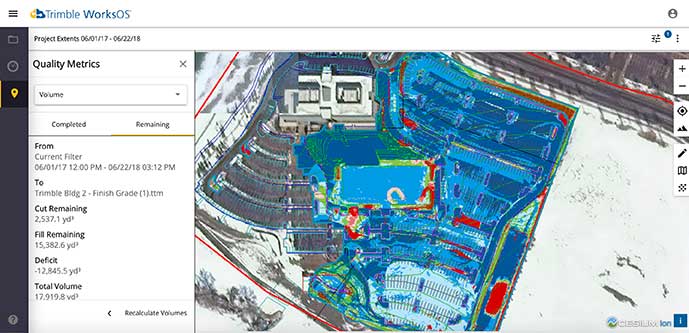
Trimble WorksOS is a new Software-as-a-Service (SaaS) operating system. The cloud-based system will integrate data from Trimble and third-party providers across the entire civil construction project lifecycle, including estimating, scheduling, designs and the field. Currently, site supervisors and project managers jump between multiple systems to keep track of daily production quantities, labor/equipment hours and equipment maintenance schedules. Works OS is designed to bring real-time visibility into jobsite progress, schedule and cost. Users will be able to log into a single application to view real-time visibility of cut, fill, volume and compaction data to maximize jobsite productivity. Site supervisors will see daily volume calculations and compaction quality metrics, and be able to monitor progress and schedules.
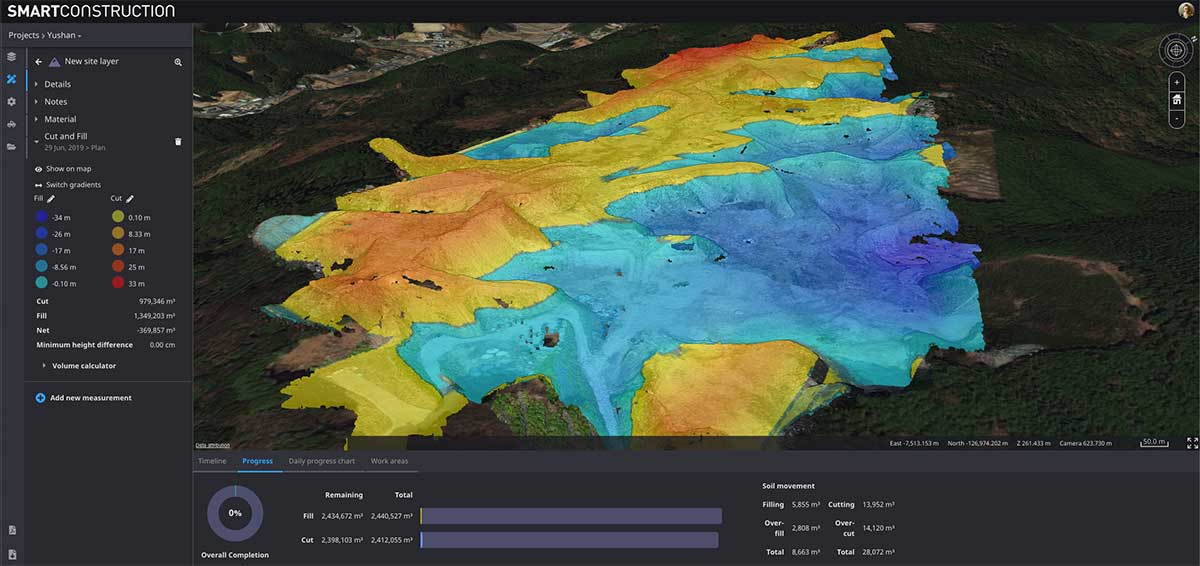
Komatsu’s Smart Construction dashboard includes the 3D visualization power and geospatial accuracy of Cesium, a platform to visualize, analyze and share 3D data. The dashboard enables users to monitor a construction site from anywhere in the world, see how it changes over time, and compare architectural plans with real-world data. It is compatible with data from sensors on construction machines, drone surveys, or computer-generated files like BIM/CAD models . It allows users to visualize projects in a single scene within a web browser, as well as calculate precise measurements for cut and fill, slope, contours and more.
Cesium, cesium.com
The TopoGrafi app has been updated to allow for display of 3D data in real-world models. With enhanced 3D data-processing capabilities, TopoGrafi is an end-to-end platform for capturing buried asset data and processing it for augmented reality visualizations. Designed to be used alongside apps such as Esri Collector for ArcGIS, the TopoGrafi platform uses GNSS data. It applies near-real-time conversions, transforming the recorded positions to local reference systems and aligning it with high-accuracy mapping including Ordnance Survey MasterMap. The TopoGrafi toolkit also includes functionality to snap 3D features to each other and to other spatially referenced data to create a 3D model that can then be used to create augmented reality visualizations accessible from the desktop or in the field.
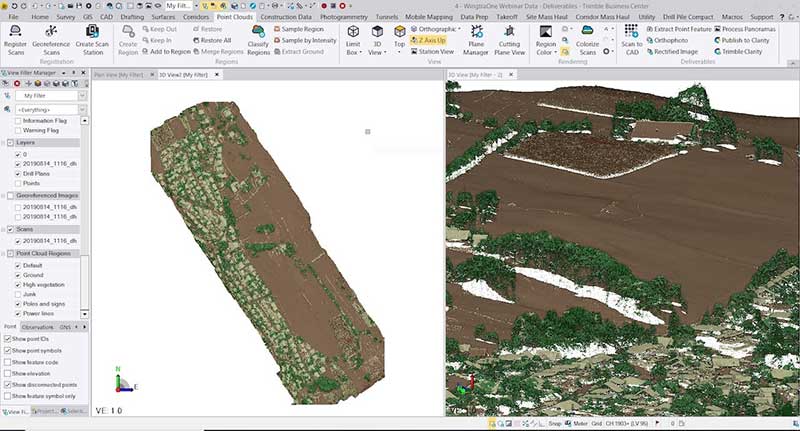
WingtraOne drone data can now be directly imported into the Trimble Business Center (TBC). The new integration combines WingtraOne high-accuracy drone data within TBC, optimizing drone mapping workflows for survey and construction projects within a single software platform. After dragging and dropping the JobXML data file, automated point cloud tools, such as classification and feature extraction, can quickly generate surface models, topographic plans and as-built deliverables. Also new: high-altitude flight capabilities, longer flight times and more intuitive battery-level readings in-flight.
The Snoopy CL-360 lidar scanner. (Photo: Lidar USA)
The Snoopy CL-360 has been meticulously designed for integration on backpack, vehicle and UAV applications. Weighing 5 kilograms fully assembled, the Snoopy CL-360 is capable of delivering highly accurate results, up to +/-0.01 feet on paved surfaces from a vehicle. The system has a scan line rate of 250 Hz with a 500-kHz data rate, giving a uniform result along and across track. The system is easily configurable with multiple scanners (similar to internet of things applications) to avoid occlusions. A UAV deployment achieves scans with usable data as much as 60 degrees off nadir (widths of more than 1,100 feet while scanning at the 400-foot ceiling). The small beam size of 0.3 mrad allows the CL-series to reliably collect ground points (such as on or near the dirt through vegetation) while also providing better detection of fine linear features such as power lines and railroad tracks.
The E300 Pro receiver tracks GNSS with 700 channels and fully supports BDS-3 signals. It supports 31 frequency points, using all GNSS constellations and frequency bands. The E300 interface has a concealed design for better protection. USB type-C charging and transmitting is a two-in-one function. The magnesium-alloy body is rugged, and the battery level can be checked with a unique LED power indicator. The weight of the whole receiver is 940 grams. The E300 Pro supports satellite station differential and satellite chain life, quick connection, intelligent voice and tilt compensation. It integrates multiple sensors including GNSS, an inertial measurement unit (IMU), a magnetometer and a thermometer. With the help of a Kalman filter algorithm, the device can dynamically output position, speed and attitude information. It can measure and make real-time dynamic sampling without the need for leveling. For better radio signal quality, the E300 Pro integrates GNSS, Bluetooth, Wi-Fi, 4G main and auxiliary antennas on the top of the receiver to ensure the best reception in all directions. An RF connector improves connection reliability while reducing loss of gain.
The Nova MS60 MultiStation combines upgraded, fast 3D laser-scanning capabilities, GNSS connectivity and digital imaging with a high-end total station. It features a fast laser-scanning speed of up to 30,000 points per second, optimized scan area definitions, adapted scan managements, and an improved scanning path for zenith scans. Professionals can perform point-cloud analysis in the field. Scan data is combined with traditionally measured points from GNSS receivers to graphically show locations the same day it is collected.
CP Aeronautics, a new division of CP Technologies, has launched integrated turn-key solutions based on unmanned aerial systems (UAS) platforms, payloads, data links, ground control stations (GCS) and communications for defense and civil applications. The systems offer operationally proven solutions for intelligence, surveillance and reconnaissance (ISR) systems requirements. Its broad product portfolio has demonstrated excellent performance and operability in demanding environments, the company stated in a press release. Backed by continuous research and development, the systems are built on three decades of technological and operational experience. Systems include Orbiter 2 Small UAS, Orbiter 3 Small Tactical UAS, Orbiter 4 Small Tactical UAS (pictured), Aerostar Tactical UAS, Dominator XP (medium-altitude long-endurance) and Pegasus 120 (vertical takeoff and landing).
A new flight control system (FCS) fits and leverages multi-mission, multi-domain UAV platforms. Using the FCS, the new Saker-1B Medium Altitude Long Endurance (MALE) UAV performs with fully autonomous online and offline operation, from takeoff to landing. Testing included more than 500 hours of day and night test missions under various weather conditions, including extremes of dust and heat. A total of 1,000 hours of take-off and landing test missions were successfully performed, with long-endurance flights lasting up to 19 hours. The Saker-1B is equipped with a satellite communication data link for beyond-visual-line-of-sight (BVLOS) operation. The FCS provides sustainability to jamming attacks and advanced data security.
VigilAir is an RF-based system of deployed sensors able to accurately detect, geolocate and track commercial drones and their operators in different environments, including dense urban environments. VigilAir provides extremely sensitive detection and highly accurate geolocation and tracking over very large areas, with virtually zero false-alarms. Being a passive, receive-only system, VigilAir can easily be installed and operated without regulatory or legal limitations. The VigilAir version 2.0 C-UAS (counter unmanned aerial system) is certified by the United Kingdom Center for the Protection of National Infrastructure (CPNI) under the CPNI’s Counter Unmanned Aerial Systems Detect, Track and Identify (DTI) testing and evaluation standard. VigilAir generates a comprehensive drone situational awareness which enables users to proactively and intelligently match correct mitigation actions with actual drone threats, on time and with minimal collateral effects.
Xpeller Rapid — the mobile version of the counter UAV solution Xpeller — uses a combination of radar, electro-optical sensors, rangefinders and jammers to protect against threats posed by over-the-counter drones. Xpeller Rapid is either integrated into a vehicle (mast solution) or comes in transport boxes and can be easily set up on tripods. Based on the Xpeller toolkit, the components follow the detect, identify, control and act workflow, defeating hostile drones at ranges up to several kilometers. The system can locate and classify even small hobby drones at a range of several kilometers. High-resolution cameras make it possible to decide whether there is a serious threat so that it can be countered with appropriate countermeasures.
Garmin International Inc., a unit of Garmin Ltd., has chosen SiTime’s micro-electromechanical system (MEMS) timing solutions for several of Garmin’s automotive, aviation, marine, fitness and outdoor products.
“Garmin makes products that are engineered on the inside for life on the outside,” said Patrick Desbois, Garmin executive vice president of operations. “Our innovation focuses on developing technologies that enable our customers to enrich their experiences as they pursue their passions. SiTime’s MEMS timing solutions help extend battery life across several of our product lines.”
SiTime timing solutions are the heartbeat of customers’ electronic systems. With the deployment of 5G, internet of things (IoT) and automotive electronics in challenging outdoor environments, manufacturers will need timing solutions that enable environmental robustness and solve difficult challenges, such as power, size, and reliability. With the proliferation of electronic devices, the timing market is expected to grow to $10.1 billion by 2024.
“Garmin creates products for active people,” said Piyush Sevalia, executive vice president of marketing at SiTime. “Precise time is at the heart of every GPS receiver and impacts the speed of signal acquisition as well as position accuracy.
“Garmin’s outdoor products encounter many environmental stresses such as shock, vibration, rapid temperature changes and extreme temperatures. SiTime’s MEMS timing solutions are engineered to provide the highest level of robustness to such stressors and provide a powerful value-add to Garmin’s high-performing, robust and reliable products.”
Module designed for developers creating guidance and navigation systems for autonomous vehicles, robots, drones, industrial, construction and agricultural machinery
Aceinna launched its OpenRTK330L at CES 2020, the massive annual consumer electronics show taking place Jan. 7-10 in Las Vegas. The company is located at Booth 6738, CES North Hall, Automotive Pavilion.
OpenRTK330L is a low-cost,high-performance triple-band RTK/GNSS receiver with built-in triple redundant inertial sensors. Designed to replace the expensive and bulky precision RTK/INS systems used in today’s autonomous systems, the compact navigation solution meets the challenging performance, reliability and cost requirements of the automotive market along with the needs of robot, drone, construction and agriculture systems, Aceinna said.
Demonstration Drive
Aceinna is demonstrating its GNSS/INS-based autonomous vehicle localization technologies on its test vehicle, which drove from Silicon Valley to Las Vegas.
The company is recording live drive-test data that demonstrates how its precision positioning solutions provide high accuracy and reliability. Precision location capability is critical for all levels of autonomous driving.
OpenRTK330L includes a triple-band RTK/GNSS receiver coupled with redundant inertial sensor arrays to provide cm-level accuracy, enhanced reliability, and superior performance during GNSS outages.
The OpenRTK330L integrates a precise 2 Degree/Hour IMU to offer ten to 30 seconds of high accuracy localization during full GNSS denial. This enables autonomous system developers to safely deliver highly accurate localization and position capabilities in their vehicles at prices that meet their budgets.
Image: Aceinna
OpenRTK330L’s embedded Ethernet interface allows easy and direct connection to GNSS correction networks around the world. OpenRTK330L’s CAN bus interface allows simple integration into existing vehicle architectures.
The multi-band GNSS receiver can monitor all global constellations (GPS, GLONASS, BeiDou, Galileo, QZSS, NAVIC, SBAS) and simultaneously track up to 80 channels. The module has RF and baseband support for the L1, L2 and L5 GPS bands and their international constellation signal equivalents.
The inertial measurement unit and dead reckoning function contains a total of 9 accelerometer and 9 rate gyro channels based on Aceinna’s unique triple redundant six-axis IMU array. By integrating a triple-redundant IMU array, the OpenRTK330L is able to recognize and utilize only valid sensor data, ensuring high-accuracy protection limits and certifiability under ISO26262 standards.
Open Navigation Platform
“The combination of a triple-band GNSS receiver and a high-precision IMU has enabled us to make a remarkably accurate, small, reliable and cost-effective GNSS/INS solution,” said Mike Horton, CTO of Aceinna. “The OpenRTK Precise Positioning Engine optimizes satellite tracking and high RTK fixes rates while integrating seamlessly with Aceinna’s open-source, developer-friendly Open Navigation Platform.”
The Open Navigation Platform allows custom embedded application development on top of Aceinna’s positioning engine and dead-reckoning algorithms. Autonomous solution developers have full access to all resources on the OpenRTK330L module including the GNSS receiver measurement data, IMU measurement data and all interfaces.
The OpenRTK330L GNSS receiver supports GPS (L1 C/A, L2C and L5), GLONASS (L1OF, L2OF), BeiDou (B1I, B2I), GALILEO (E1, E5a, E5b, E6) QZSS (L1 C/A), and NAVIC. The IMU sensor array includes a triple-redundant, 3-axis MEMS angular rate sensor, and a triple-redundant, 3-axis MEMS accelerometer.
Hardware also includes, Ethernet, UART, SPI and CAN interfaces for versatile integration into a host system. Additional specifications include operating temperature range of -40C to +85C, and qualification to standard automotive shock and vibration levels.
CHC Navigation has released and is immediately shipping its new i90 IMU-RTK GNSS Series receiver. The i90 IMU-RTK GNSS Series is designed to dramatically increase GNSS real-time kinematic (RTK) availability and reliability.
The i90 is powered by the company’s latest inertial measurement unit (IMU) and RTK technology to provide robust and accurate GNSS positioning in any circumstances.
Unlike standard micro-electro-mechanical (MEMS)-based GNSS receivers, the i90 GNSS IMU-RTK combines a high-end calibration and interference-free IMU sensor with a state-of-the-art GNSS RTK engine and advanced GNSS tracking capabilities.
The i90 is designed to increase productivity and reliability of survey projects. No complicated calibration process, rotation, leveling or accessories are necessary with the i90 GNSS Series. Just a few meters’ walk will initialize the i90 internal IMU sensor and enable RTK survey in difficult field environments. The i90 GNSS automatic pole-tilt compensation boosts survey and stakeout speed by up to 20%.
“Our new i90 IMU-RTK GNSS Series is pushing the boundaries of conventional GNSS survey by extending RTK positioning availability and reliability,” said George Zhao, CEO of CHC Navigation. “CHCNAV is the GNSS technology enabler, making high-end GNSS solutions available for every surveyor.”
SiTime Corp. has unveiled its Endura micro-electro-mechanical system (MEMS) timing solutions for aerospace and defense applications including precision GNSS, as well as field and satellite communications, avionics and space.
The Endura products are engineered to provide high performance in harsh conditions — severe shock, vibration and extreme temperature — that are routinely experienced in these applications.
SiTime offers customers 5 million possible part numbers that can be created from 17 programmable products.
“When exposed to high levels of shock, vibration, and extreme temperatures, legacy timing components have been prone to failure, degrading system performance and reliability,” said Piyush Sevalia, executive vice president of marketing. “To solve these problems, SiTime created an oscillator system of silicon MEMS, analog circuits, compensation algorithms, and advanced packaging, which is designed to outperform any other available timing solution in harsh environments.
“For example, Endura precision TCXOs deliver 4 parts per trillion per g (ppt/g) of acceleration sensitivity, which is 50 times better than legacy quartz-based solutions. With such performance, we believe that Endura will transform the oscillator landscape in aerospace and defense.”
Highlights of the company’s solutions include:
4 parts per trillion per g force of acceleration (50 times better than quartz)
Supports –55 degreesCelsius and +125 degrees Celsius operation
Key timing specifications conform to MIL-PRF-55310
Five million possible part numbers
Endura Super-TCXOs (temperature compensated oscillators) for use in high-speed communications and GNSS applications include:
SiT5146/SiT5147 – 1 to 220 MHz, ±0.5 to ±2.5 ppm, -40 degrees Celsius to +105 degrees Celsius
SiT5346/SiT5347 – 1 to 220 MHz, precision ±0.1 to ±0.25 ppm, -40 degrees Celsius to +105 degrees Celsius
SiT5348/SiT5349 – 1 to 220 MHz, ultra-precision ±0.05 ppm
SiTime’s portfolio of commercial off-the-shelf (COTS) Endura products spans six oscillator types and 17 products. All devices offer programmable options such as frequency, operating voltage and stability.
In addition, some devices offer specialized programmable features such as spread spectrum, pull-range, and differential output type.
Endura products are available with up to two grades of acceleration sensitivity, as low as 4 ppt/g (typical). This breadth of products provides customers with a large selection and the ability to configure each device for their application requirements.
Endura products are also designed for continuity of supply for long-life programs.
By Urs Niesen, Jubin Jose, Xinzhou Wu, Qualcomm Technologies Inc.
Emerging automotive applications require reliable but at the same time low-cost positioning solutions. In this paper, we present such a solution by fusing the measurements from several consumer-grade sensors using a tightly coupled centralized filter.
The sensors used are a single-frequency GNSS receiver providing GPS and GLONASS pseudoranges and GPS carrier-phase measurements, a micro-electro-mechanical (MEMS) inertial measurement unit (IMU), a monocular camera, wheel-speed and steering-angle sensors.
We also employ vehicular constraints, integrated as pseudo-measurements. The centralized fusion architecture allows sensor cross-calibration and improves outlier detection. The filter runs in real time on the target platform, producing pose estimates at 30 Hz. Through extensive experimental evaluations, we demonstrate positioning accuracies of sub-meter 95-percentile horizontal errors even in GNSS-challenged deep-urban scenarios.
Conflicting Requirements. Accurate positioning is a requirement for several emerging vehicular applications such as advanced driver-assistance systems (ADAS) and autonomous driving. Positioning solutions for these applications face two competing constraints. To be technically viable, the computed position estimate needs to be reliable in scenarios ranging from open sky to deep urban, with less than 1-meter 95-percentile horizontal error as an often-mentioned target. To be economically viable, the system needs to be built from consumer-grade components.
We reconcile these conflicting requirements by fusing measurements from several low-cost sensors into a single pose estimate using one centralized extended Kalman filter (EKF). A multi-constellation single-frequency GNSS receiver provides GPS pseudorange and carrier-phase measurements and GLONASS pseudorange measurements. These are combined in a tightly coupled integration architecture with a consumer-grade MEMS IMU used to produce the reference navigation solution.
Tight integration enables outlier rejection directly for the raw GNSS measurements. This is crucial in deep-urban scenarios, since many or most raw GNSS measurements could be outliers in these conditions. We use a monocular camera and vehicular sensors, providing four wheel-speed measurements and a steering-angle measurement, as additional aiding sensors.
Constraints. Finally, vehicular constraints are integrated as pseudo-measurements. These sensors have very different noise sources and failure modes, which allows cross-calibration and improves failure and outlier detection. Given the tightly coupled integration in a single EKF, the filter state is quite large and can reach more than 100 dimensions. Despite its size, we are able to run the filter in real time and on target, producing pose outputs at a rate of 30 Hz.
We report the result of extensive experimental evaluations in different scenarios ranging from open sky with good satellite visibility to deep urban with long stretches of no or only limited satellite visibility. In each of these scenarios, we obtain the target accuracy of sub-meter 95% horizontal positioning error.
We show that, in the benign open-sky scenarios, GPS and IMU sensors are sufficient to achieve the target accuracy. However, in challenging deep-urban scenarios, all the integrated sensors are required to attain reliable sub-meter positioning performance.
Sensors and Components. We use Qualcomm SiRFstarV 5e B02 GNSS chipset, a low-cost commercial GNSS product, connected to a NovAtel GPS-702-GG dual-frequency GPS+GLONASS Pinwheel antenna, the only component not consumer-grade, to separate impact of a specific antenna on performance. We plan to evaluate low-cost antennas in the future. We use a TDK InvenSense low-cost MEMS 6-axis IMU (MPU-6150) and a vehicle interface with vehicle sensors through the controller area network bus. Accurate timestamping for tightly coupling sensor measurements is provided by a custom sensor sync board. The processor is a Qualcomm Snapdragon 820 automotive platform for real-time computation. (Qualcomm SiRFstar and Qualcomm Snapdragon are products of Qualcomm Technologies, Inc. and/or its subsidiaries.)
Honeywell displayed its HG4930 MEMS-based inertial measurement unit (IMU) at Xponential 2019, which took place April 29-May 2 in Chicago.
The company emphasized the IMU’s rugged design, which the company says allows the IMU to meet the needs of the most demanding users. The HG4930 also features gyroscopes, accelerometers and an internal environmental isolation system.
Check out the video below, which showcases the HG4930 being treated as a hockey puck.
According to Honeywell, the HG4930 can be used for applications in the agriculture, automotive, communication, construction, energy, inspection, mapping, marine, mining, robotics, surveillance and transportation industries.
Inertial 2019, the sixth annual Institute of Electrical and Electronics Engineers (IEEE) International Symposium on Inertial Sensors and Systems, took place in Florida earlier this month. Events of particular note included two keynote talks from experts at the U.S. Defense Advanced Research Projects Agency (DARPA) and the Air Force Institute of Technology (AFIT), and a technical paper on the “Design and Performance of Wheel-mounted MEMS Inertial Measurement Unit (IMU) for Vehicular Navigation.”
Miniature Sensors. Ronald Polcawich from DARPA addressed “Miniature Navigation Grade Inertial Sensors: Status and Outlook.” The agency’s Precise Robust Inertial Guidance for Munitions (PRIGM) program has focused for more than three years on developing inertial sensor technologies to enable PNT in GPS-denied environments. PRIGM has developed a navigation-grade inertial measurement unit (NGIMU) based on micro-electromechanical systems (MEMS) platforms. The device has a mechanical/electronic interface compatible with drop-in replacement for existing tactical-grade IMUs on legacy U.S. Department of Defense (DoD) platforms.
PRIGM’s second main area of interest is advanced inertial micro sensor (AIMS) technologies for future gun-hard, high-bandwidth, high-dynamic-range, GPS-free navigation. It explores alternative technologies and modalities for inertial sensing, including photonic and MEMS-photonic integration, as well as novel architectures and materials systems.
Map-Matching. Aaron Canciani from AFIT educated the many computer scientists, software developers, information technology professionals, physicists and electrical and electronics engineering attendees on “The Importance of INS Accuracy for Map-Matching Navigation.”
The GPS-alternative technique matches measurements from a sensor to a map to provide navigation information. With repeatable measurements, almost any map may be used to navigate. Common maps used for navigation include terrain height, gravity, magnetic fields, Wi-Fi RSS and more. The inertial navigation system often plays a critical role in the accuracy of these methods, and increased INS accuracy plays a synergistic role in an overall map-matching navigation system.
WHEEL-MOUNTED IMUS
In today’s automobiles, MEMS gyroscopes and accelerometers provide essential measurements for enhancing stability and control. Both types of sensors have significant noise at low frequencies, limiting the measurement accuracy, particularly in low-dynamic conditions. Further, uncompensated accelerometer tilt causes large bias to acceleration estimates. For gyroscopes, physical rotation of the sensor can remove the constant part of the gyro errors and reduce low-frequency noise. In ground vehicles, such rotation occurs conveniently in wheels.
When inertial sensors are attached to the wheel, both types of sensors provide information on the rotation, gyroscopes naturally and accelerometers via specific force measurement. As a result of carouseling, accurate wheel heading, roll and pitch estimation can be estimated with high resolution, and the result is nearly bias-free. Combining the wheel orientation to distance traveled via known radius enables classic dead-reckoning mechanization (assuming zero slip) and other vehicle dynamics monitoring systems (considering wheel slip as unknown to be solved).
Authors Jussi Collin of JC Inertial Oy, Finland, and Oleg Mezentsev, Pacific Inertial Systems Inc., Canada, provided details of wheel-mounted inertial system hardware and algorithms and showed test results for several system configurations and applications. They discussed future system improvements — in particular, system miniaturization and an energy-harvesting development progress for next-generation inertial systems.
They have designed a wheel-mountable sensor system that contains MEMS sensors, battery, Bluetooth module and electronics to run computations and navigation algorithms on board. It operates in several programmable modes:
Computes navigation parameters real time and sends them via Bluetooth to an onboard computer (can be any other integrated system, data logger or a tablet).
Sends real-time raw data to an onboard computer.
Records high-rate raw sensor data (up to 2 kHz) to an embedded micro-SD card.
The onboard computer is a MEMS-array IMU with 48 gyro and accelerometer channels, with a BT receiving and sync controller, data storage and Wi-Fi interface. They can connect up to four such units to one onboard computer and have all their data in sync with the in-cabin inertial data. All of this data can be used for navigation, wheel dynamics measurements or road quality monitoring applications.
A roundup of recent products in the GNSS and inertial positioning industry from the March 2019 issue of GPS World magazine.
MEMS INS/GPS
Update improves heading performance and reduces jitter
Photo: Systron Donner
The SDN500 digital quartz micro-electro-mechanical systems (MEMS) GPS inertial navigation system (GPS/INS) has been updated. Model SDN500-xE provides a newer generation JF2 (C/A) code GPS receiver and tightly couples the 1 PPS GPS signal to the SDI505 IMU synch pulse to improve heading performance and reduce jitter after long periods of operation without dynamic inputs. The 25-inch-square SDN500 provides for maximum packaging flexibility in dense systems and delivers accuracies to within 1.0 mrad in attitude, 0.1 m/s in velocity and 3.9 meters spherical error probability (SEP). It offers tactical-grade performance, integrating SDI’s latest quartz gyros capable of 0.5°/hr. bias in-run stability and low angular random walk (ARW, 0.02°/√ hr), quartz accelerometers delivering 0.5 milli-g in-run bias stability and low velocity random walk (VRW, 80 µg/√ Hz), plus high-speed digital signal into a tightly coupled GPS/INS for tactical navigation and geo-location applications.
Testing location accuracy performance of mobile devices
Photo: Rohde & Schwarz
To create test concepts for over-the-air (OTA) antenna measurements, Rohde & Schwarz and Bluetest have integrated the R&S LBS Server, a software component running on the R&S CMW500 wideband radio communication tester, and the Bluetest over-the-air (OTA) test solution for A-GNSS systems based on Bluetest’s RTS65 reverberation chamber and Bluetest’s Flow measurement software. The R&S LBS Server controls the Rohde & Schwarz base-station simulator R&S CMW500 for LTE, WCDMA and GSM, and uses the R&S SMBV100B vector signal generator for simulation of GNSS and metropolitan beacon systems (MBS) signals. An upgrade for 5G will be available soon. The R&S LBS Server is an essential part of the R&S TS8991 OTA Performance Test System.
Brings Navsight technology to the most demanding environments
Photo: SBG Systems
The Horizon IMU adds a third choice to SBG System’s Navsight Land/Air Solution. It is a FOG-based high-performance inertial measurement unit (IMU) designed for highly demanding surveying applications such as high-altitude data collection or mobile mapping in dense areas such as urban canyons. The Horizon IMU joins the Ekinox and Apogee IMUs as options for Navsight. The different levels of accuracy enable the solution to meet various application requirements and can be connected to various external equipment such as odometer, lidar and more. The Horizon IMU allows customers to use Navsight in high-altitude and highly dense areas, as well as where only a single antenna can be used. It is based on closed-loop FOG technology that enables ultra-low bias and noise levels. The Navsight solution can be installed in a plane or car — the sensor alignment and lever arms are automatically estimated and validated. The Navsight unit also integrates LED indicators for satellite availability, real-time kinematic (RTK) corrections and power. Qinertia post-processing software provides access to offline RTK corrections from more than 7,000 base stations in 164 countries.
The Coach 4×4 Wi-Fi/DSRC GNSS multi-band antenna enables smart grids, mobile workforce communications, and advanced automation technologies. The dual-band 802.11ac/p MIMO antenna helps boost data rates and reliability for utility networks, intelligent transportation systems and other industrial internet of things (IoT) applications. The low-profile antenna features four-port 2.4/5-GHz coverage along with PCTEL’s high-rejection GPS/GLONASS technology for network timing and tracking in a single IP67-rated housing.
The module was introduced at the Electronica 2018 show, held Nov. 13-16 in Munich, Germany.
As the latest addition to Quectel’s GNSS portfolio, L26-DR is a concurrent multi-GNSS receiver module embedded with dead-reckoning solution, which greatly improves the positioning accuracy and speed while simplifying customer designs, the company said.
The dead-reckoning capability ensures the module delivers the highest performance positioning solution available, even when GNSS signal is absent or compromised, the company said.
Equipped with six-axis sensor MEMs and a powerful GNSS core, the module provides high sensitivity, fast GNSS signal acquisition and tracking with low system integration effort.
Moreover, the built-in low-noise amplifier offers the module with improved RF sensitivity and exceptional acquisition and tracking performances even in weak signal areas.
L26-DR is able to acquire and track any mix of GPS, GLONASS, BeiDou, Galileo and QZSS signals, which allows accurate navigation in harsh environments such as urban canyons, the company added. Compared with using GPS only, enabling multiple GNSS systems generally increases the number of visible satellites, reduces the time to first fix and improves positioning accuracy, especially when driving in rough urban environments.
Designed for automotive and industrial applications, the L26-DR comes in an ultra-compact size of 12.2 × 16.0 × 2.3 millimeters. The compact GNSS module also supports other precise positioning technologies, including differential GPS (RTCM) and SBAS (WAAS/EGNOS/MSAS/GAGAN).
According to the company, engineering samples of Quectel L26-DR will be available in December.
Unicore Communications has launched CLAP-B, a multi-GNSS/MEMS integrated inertial navigation board, which integrates a miniaturized high-performance inertial measurement unit (IMU) on a compact high performance GNSS board.
The high-accuracy GNSS positioning coupled with a high-precision gyro and accelerometer provides stable, continuous three-dimensional position, velocity and attitude, as well as original acceleration and angular velocity measurements, even in GNSS-denied environments, the company said.
CLAP (Concurrent Localization & Attitude Pilot) technology is a high-precision multi-sensor fusion positioning and orientation technology developed by Unicore.
The CLAP- B, along with all the UM and UB family of receivers, are on display at BDStar booth C12.0C.022 for the duration of Intergeo 2018 starting Oct. 16 in Frankfurt, Germany.
Key features of the CLAP-B include:
Compact size: 46 × 71 × 17.1 mm
5-ns RMS PPS output
0.1 degree (1σ) pitch and roll
WINS optimized technology (wheel INS) for vehicles, wheeled robotics
With the features of compact size, light weight, low power consumption, and easy for integration and mass production, CLAP-B is suitable for applications such as autonomous driving, smart surveying, unmanned aerial vehicles and various attitude stabilization platforms. Customer samples will be available by the first quarter of 2019.