Microchip Technology has released the TimePictra 12 platform, a major software upgrade to its synchronization management software to help critical-infrastructure operators manage advanced timing architectures with greater visibility, automation and control. The new version delivers a redesigned graphical user interface (GUI), expanded automation capabilities and enhanced support for the latest high‑accuracy timing technologies.
As telecom, power, transportation, data center and other critical infrastructure networks evolve, operators are increasingly deploying more sophisticated synchronization architectures to improve resilience, reduce dependence on GNSS and maintain precise clock alignment across distributed environments. The TimePictra 12 platform addresses these requirements with enhanced capabilities for managing high-accuracy time transfer connections, monitoring GNSS observables using Microchip’s BlueSky technology, and maintaining clock alignment using SkyWire technology.
The platform is also designed to strengthen GNSS visibility and resiliency by monitoring using BlueSky technology. By enabling centralized monitoring of GNSS-observables, the TimePictra 12 platform helps operators better understand GNSS conditions, identify anomalies, and manage timing infrastructure in environments where GNSS availability, integrity and security are critical.
In addition, the TimePictra 12 platform supports the maintenance of clock alignment using SkyWire technology, helping operators preserve synchronization accuracy across distributed network elements. This capability is especially important as networks become more distributed, automated and dependent on precise phase and frequency alignment.
The TimePictra 12 software suite introduces a refreshed user experience designed to simplify how operators interact with large, meshed synchronization environments. The modernized GUI makes it easier to view network relationships, identify issues and streamline ongoing management, helping reduce operational overhead for telecom, power, data center and other timing‑dependent sectors such as telecom, power, transportation, data centers and AI infrastructure.
To help minimize deployment challenges, the software is designed to accelerate network rollouts, upgrades and configuration activities. The TimePictra 12 platform supports up to 5,000 elements, more than double the network size of earlier versions, providing increased capacity for large-scale synchronization deployments.
The TimePictra 12 platform supports a broad range of Microchip’s synchronization products, including the TimeProvider 4100, 4500 and 5000 grandmaster clocks, SSU-2000, TimeCesium 4400 and 5071 products, Skywire technology and BlueSky GNSS Firewall. It enables centralized monitoring, configuration and management of these devices across critical infrastructure networks such as 5G, utilities, transportation, power substations, AI and datacenters.
Microchip Technology has released its MD-990-0011-B family of plug-in timing modules, delivering turnkey, high-precision synchronization for data center servers and 5G virtualized radio access networks (vRAN).
Developed in collaboration with Intel, the MD-990-0011-B timing module is designed for seamless compatibility with Intel Xeon 6 SoC-powered server platforms, supporting both OEMs and ODMs in building future-ready systems. By leveraging Intel’s foundational vRAN architecture, the module enables robust, low-latency time synchronization, which is essential for distributed AI workloads and real-time applications.
Engineered for the reliability and scalability required by cloud infrastructure, virtualization and high-availability deployments, the MD-990-0011-B supports automatic source selection and locking across GNSS, synchronous Ethernet (SyncE) and precision time protocol (PTP). This flexibility supports continuous, accurate timing even as network demands evolve.
The MD-990-0011-B timing modules are available in two variants. MD-990-0011-BC01 offers eight hours of holdover performance; MD-990-0011-BA01 offers four hours of holdover performance. These timing modules consolidate several of Microchip’s advanced technologies into a single, highly integrated solution. Key components include:
Synchronous Ethernet (SyncE) synthesizer (ZL80132B). Two independent digital phase-locked loop (DPLL) channels for flexible and resilient synchronization
Oven controlled crystal oscillators (OCXOs, OX-22x). Provide up to eight hours of holdover, ensuring stable timing during GNSS outages or network disruptions
MCP9808 temperature sensor. Supports enhanced, environmental monitor 24LC024 EEPROM implementing board configuration and VC-820for low jitter performance
By unifying these critical timing components into a single plug-in module, the MD-990-0011-B streamlines server architecture, reduces design complexity and simplifies the supply chain. Its modular design enables rapid installation and simplified maintenance, minimizing downtime and facilitating effortless upgrades, key advantages for dynamic data center and 5G network environments.
Microchip Technology has released the TimeProvider 4500 v3 grandmaster clock (TP4500) designed to deliver sub-nanosecond accuracy for time distribution across 800 km long-haul optical transmission.
Most current deployments require GNSS at grandmaster sites, but the TP4500 enables highly resilient synchronization without relying on GNSS, providing critical infrastructure operators with complementary positioning, navigation and timing (PNT). The TP4500 is a resilient, terrestrial solution for the absence of GNSS in precise timing, alleviating physical obstruction, security and signal interference costs associated with GNSS-dependent deployments.
The TP4500 supports time reference provided by UTC(k) UTC time provided by national labs. It offers a premium capability that delivers High Accuracy Time Transfer (HA-TT) as defined by ITU-T G.8271.1/Y.1366.1 (01/2024) to meet 5 nanoseconds (ns) time delay over 800 km (equating to 500 picoseconds (ps) average per node, assuming 10 nodes), setting a new industry benchmark for accuracy.
The TP4500 system can be configured with multiple operation modes to form an end-to-end architecture known as virtual PRTC (vPRTC), capable of delivering PRTC accuracy over a long-distance optical network. vPRTC is a carrier-grade architecture for terrestrial distribution of HA-TT, which has been widely deployed in operator networks throughout the world.
TimeProvider 4500 v3 is a key steppingstone towards support of the ITU-T G.8272.2 standard, which defines a coherent network reference time clock (cnPRTC) in amendment 2 (2024). An cnPRTC architecture ensures highly accurate, resilient, and robust timekeeping throughout a telecom network. This allows stable, network-wide ePRTC time accuracy, even during periods of regional or network-wide GNSS unavailability or other failures and interruptions.
Microchip Technology’s new SkyWire is a time measurement tool embedded in its BlueSky Firewall 2200. It’s designed to measure, align and verify time to within nanoseconds even when clocks are long distances apart. The technology enables highly scalable and precise time traceability to metrology labs to protect critical infrastructure systems.
Network clocks are the backbone of critical infrastructure operations, with the precise alignment of clocks becoming increasingly important for data centers, power utilities, wireless and wireline networks and financial institutions.
For critical infrastructure operators to deploy timing architectures with reliability and resiliency, their clocks and timing references must be measured and verified to an authoritative time source such as Coordinated Universal Time (UTC).
With the BlueSky GNSS Firewall 2200 and SkyWire technology, geographically dispersed timing systems can be compared to each other and compared to the time scale systems deployed at metrology labs within nanoseconds. Measurement of clock alignment and traceability to this level has typically only been done between metrology labs and scientific institutes.
With Microchip’s solution, critical timing networks for air traffic control, transportation, public utilities and financial services can achieve alignment within nanoseconds between its clocks to protect their infrastructure no matter where the clocks are located.
“To ensure timing systems are delivering to stringent accuracy requirements, it’s important to measure and verify in an independent manner relative to UTC as managed by national laboratories and traceable to the Bureau International Poids et Mesures (BIPM),” said Randy Brudzinski, corporate vice president of Microchip’s frequency and timing systems business unit. “With the new SkyWire technology solution, we’re making UTC more widely accessible so that large deployments of clocks can be independently measured and verified against each other across long distances.”
The concept originated as an extension to the National Institute of Standards and Technology’s (NIST’s) pre-existing service called Time Measurement and Analysis Service (TMAS), which is utilized by entities that are required to maintain an accurate local time standard. The BlueSky GNSS Firewall 2200 with SkyWire technology provides a commercial off-the-shelf (COTS) product to enable critical infrastructure operators to connect with the NIST TMAS Data Service for large-volume clock deployments.
“At NIST, our goal is to enable the most accurate time to support our country’s infrastructure,” said, Andrew Novick, NIST engineer. “Our TMAS Data Service, in conjunction with commercial hardware, provides a scalable solution for anyone who needs traceable and accurate timing.”
Nations around the globe can replicate this solution using Microchip’s SkyWire technology capabilities within its TimePictra software suite, which delivers similar features and functionality as that provided by the NIST TMAS Data Service. Metrology labs, government agencies and enterprises worldwide can deploy TimePictra software suite and the BlueSky GNSS Firewall 2200 with SkyWire technology and have their own end-to-end solution for traceable time measurement, alignment and verification.
The TimePictrasoftware suite provides customers with support to deploy BlueSky GNSS Firewalls at scale.
Aerospace and defense applications depend on position, navigation and timing (PNT) technology for mission-critical accuracy and reliability. But integrating PNT into designs requires extensive specialized knowledge.
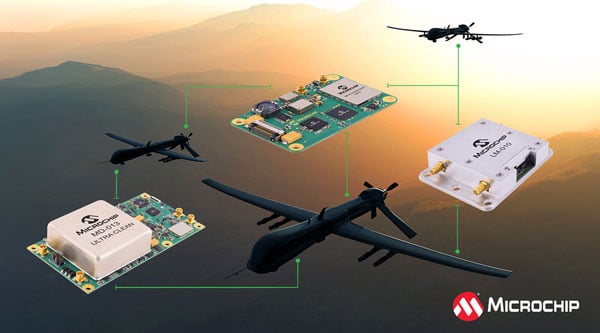
To accelerate development, Microchip Technology has introduced a portfolio of GNSS Disciplined Oscillator (GNSSDO) modules that integrate the company’s atomic clock and oscillator technologies, including the Chip-Scale Atomic Clock, Miniature Atomic Clock and Oven-Controlled Quartz Crystal Oscillators.
The GNSSDO modules process reference signals from GNSS or alternative clock sources and discipline onboard oscillators to reference signals, enabling precise timing, stability and holdover performance based on application requirements. The modules serve military and defense applications including radar, satellite communications, mounted and dismounted radios, vehicle platforms and other critical PNT applications, including GNSS-denied environments.
A GNSSDO module functions as a PNT subsystem within larger system designs or as a standalone system, providing precise timing critical to high-performance systems. Microchip engineers and manufactures the local oscillators used in the modules. Other Microchip components include 32-bit microcontrollers and SmartFusion 2 field-programmable gate arrays.
MD-013 ULTRA CLEAN: Microchip’s highest-performance standard GNSSDO module supports multiple GNSS constellations or external reference input. The module uses a high-performance OCXO that enables outputs with ultra-low phase noise and short-term frequency stability. Phase noise performance specifications are minus 119 dBc/Hz at 1 Hz offset and noise floor of minus 165 dBc/Hz. Short-term frequency stability, measured by Allan Deviation, is 3E-13 at 1-second tau, 6E-13 at 10-second tau and 9E-13 at 100-second tau. The module generates 1 PPS TTL, 10 MHz sine wave and 10 MHz square wave outputs disciplined to an embedded 72-channel single-band GNSS receiver, with optional upgrade to configurable L1/L2 or L1/L5 dual-band, multi-GNSS receiver.
MD-300: Designed for harsh environments in a 1.5 in-by-2.5-in footprint, the MD-300 features an embedded MEMS OCXO or TCXO as the local oscillator, enabling low g-sensitivity, high shock and vibration tolerance and low thermal transient response. Its size, weight, and power performance make it suitable for applicationssuch as drones and manpacks. The module disciplines to embedded GNSS receivers or external references and outputs high-performance 10 MHz and 1 PPS signals.
LM-010: A PPS disciplined module providing precise timing for Low Earth Orbit applications requiring radiation tolerance with stability and holdover capability. The standard platform module provides 1 PPS TTL and 10 MHz sine wave outputs disciplined to an external reference input. The module contains Microchip’s digitally corrected OCXO or low-power CSAC SA.45.
The GNSSDO modules use common serial communication protocols and graphical user interfaces for command and control. Software can configure various parameters, including inputs, outputs, auto switching, holdover parameters, GNSS tracking and observables, and reporting messages from the serial interface.
Microchip Technology has introduced its second-generation Low-Noise Chip-Scale Atomic Clock (LN-CSAC), model SA65-LN. It features a lower profile height and operates in a wider temperature range, providing low-phase noise and atomic clock stability in challenging environments.
Chip-scale atomic clocks (CSACs) offer precise and stable timing in situations where traditional atomic clocks are impractical due to size or power constraints or where satellite-based references may be unreliable.
The SA65-LN, featuring Microchip’s Evacuated Miniature Crystal Oscillator (EMXO) technology, offers significant advancements in oscillator design. With a profile height of less than half an inch, power consumption under 295 mW, and an operating temperature range from −40°C to +80°C, this compact device delivers impressive performance. These enhanced specifications make the SA65-LN an ideal choice for a wide array of aerospace and defense applications. It is particularly well-suited for use in mobile radar systems, dismounted radios, IED jamming equipment, autonomous sensor networks, and unmanned vehicles, where size, power efficiency, and temperature resilience are crucial factors.
The LN-CSAC combines a crystal oscillator and an atomic clock in a single device, offering a low-phase noise of 10 Hz < −120 dBc/Hz, an Allan Deviation (ADEV) stability of < 1E-11 at 1-second averaging time, and an initial accuracy of ±0.5 ppb. The LN-CSAC also demonstrates frequency stability with a < 0.9 ppb/mo drift and maximum temperature-induced errors of < ±0.3ppb. These features contribute to high-quality signal integrity and atomic-level accuracy, potentially extending mission durations and reducing maintenance requirements.
In the early 19th century, as the sun moved across Britain from east to west, people set their clocks to local mean time, so that noon in Greenwich would occur about 16½ minutes before noon in Plymouth. Back then, travel on foot, by horse, or by coach was slow and inconvenient, so having to adjust their pocket watch, for the few who even had one, was the least of travelers’ concerns.
However, with the advent of railway travel, keeping track of time differences became confusing and impractical. In 1845, Henry Booth, a railway businessman involved with the Liverpool and Manchester Railway, petitioned parliament for a “Uniformity of Time,” arguing that when “the great bell of St. Paul’s strikes ONE, simultaneously, every City clock and Village chime, from John of Groat’s to the Land’s End, strikes ONE, also.”
In addition to rail travel, advances in industrialization and automation also increasingly required time standardization, synchronization, and optimization. With the advent of satellite navigation, the requirement for accurate time reached the order of nanoseconds, because a signal delay of one nanosecond corresponds to roughly one foot of distance on the ground. This is why atomic clocks were one of the enabling technologies for GPS.
In turn, atomic clocks on GNSS satellites became the most convenient way to calibrate and synchronize local clocks on the ground and to meet the stringent timing requirements of financial institutions, communication and broadcast networks, power utilities, transportation networks, weather radars, and a variety of scientific, commercial, military and consumer systems. Even though computer networks use PTP and other synchronization protocols, they all ultimately tie back to GNSS timing receivers to synchronize them to a global clock. This has made GNSS timing receivers ubiquitous and indispensable. Yet, the T in PNT (positioning, navigation, and timing) is invisible to most people and often an afterthought even for many of us in the industry.
I discussed some of the challenges of GNSS timing with representatives of five companies:
Paul Skoog and Eric Colard, senior technical engineers of product marketing, Microchip, frequency and time systems business unit
Jeff Gao, GM of communications, enterprise and data centers, SiTime
Farrokh Farrokhi, founder and president, etherWhere
Beacham Still, director of business development and operations lead, SyncWorks
For the full transcripts of my interviews for this article, visit here.
Positioning vs. timing
The first step in using GNSS signals for time synchronization is to process them to extract pseudoranges in the same way as for positioning — except that the signal from a single satellite is usually sufficient, because the position of the phase center of the receiver’s antenna is determined once and for all when it is installed.
However, most timing applications require much more accurate timing than positioning applications. “In GPS, let’s say that position accuracy is one meter with a clear view of the sky,” said Farrokhi. “That translates to a few nanoseconds of error. To achieve that over, say, a 24-hour cycle requires much tighter jitter on the receiver. So, the challenge for a timing application is to do a much better job of removing sources of errors compared to positioning. In the past, a requirement of 20 ns jitter in timing may have been enough for many applications. However, as the communication systems’ bandwidth and throughput increase, the requirement for timing becomes more stringent. We must come up with new algorithms and new architectures to reduce jitter and improve accuracy.”
Another difference is that most timing receivers — such as those in a cellular base station — are stationary and connected to an antenna with a clear view of the sky. “There are methods to extract and remove most uncertainties and inaccuracies,” said Farrokhi.
“Since it’s not moving, many satellites feed into the equations that help you solve the math to get you very accurate timing,” said Skoog.
”Finally, most GNSS positioning applications don’t require holdover, while for GNSS timing “holdover is a universal requirement,” said Gao, “ranging from four hours, for an edge data center or a small facility, all the way to 24 hours for a large cluster of servers or, in some extreme cases, even 48 to 72 hours for deployment in or near a hostile environment, where you expect jamming and all those bad things to happen.”
Accuracy requirements
etherWhere’s ew 6181 multi-GNSS timing receiver has a very low jitter across a wide range of temperatures.
The main critical applications for GNSS timing can be roughly grouped by the accuracy they require — but they are changing. “For example, for cellular systems up to 30 ns jitter used to be enough,” said Farrokhi.
“As we move to 5G and 6G, this spec becomes tighter and tighter. We now must be below 5 ns for 6G. As we increase the bandwidth and must support higher throughput, we are more sensitive to timing inaccuracies.”
“5G probably has the clearest requirement because you need 130 ns of relative time accuracy from one tower to another, mostly for handoff,” said Gao. “The accuracy requirements increase as you start to provide different services. For example, if different carriers want to aggregate some services, you start moving from 130 ns down to 65 ns, maybe even down to something more accurate.
“Today, what’s driving the growth of our business is all in data centers and artificial intelligence (AI),” said Gao. “That ranges from traditional front-end server infrastructure and back-end AI workloads to edge data centers.” Timing requirements for data centers differ from those for other applications in terms of accuracy, reliability, and distribution to different locations, not all of which can have an antenna on the roof. “It’s a very interesting, multi-dimensional problem.”
The requirements for financial services are defined in the United States by the Securities and Exchange Commission (SEC) and in Europe by the European Securities and Markets Authority (ESMA). To be legal, timing must have an audit trail all the way back to UTC and not diverge from it by more than 100 μs at the transaction level — the servers and the routers, said Gao.
Additionally, in the United States, the Financial Industry Regulatory Authority (FINRA) requires financial institutions to be 50 ms to the National Institute of Standards and Technology (NIST). “That’s a hole so big you can drive a bus through it,” said Skoog. “However, if you want to trade on a stock exchange in Europe, you’re down to 100 µs. People typically will get a time server that will get them down to where they’re doing all their time stamping at better than a microsecond, but they put in a rubidium oscillator, so that if GPS goes away they can still finish that trading day and be better than 100 µs to UTC.”
“For the bigger data centers there are no industry-wide standards,” said Gao. “Cloud service providers can each define their own requirements. What they care about is the window of time uncertainty: whether at the server level I have an error of 1 ms or 5 ms. You can go to 1 μs of error or down to 10 ns of error, each of which will enable you to provide a set of services. At 100 μs, for example, 99% of all your services are running. At 5 ms, you may have to start shutting down some services. More accurate time on the server also enables you to minimize the network traffic. So, conceptually, you can look at data center requirements anywhere from 5 ms all the way down to hundreds of nanoseconds, or even more accurate.”
“Many markets have a lot in common, because they have communication networks,” said Colard. “For example, train and subway networks have communication networks very similar to those of telecoms. In the power industry, you have a communication network and a substation network. In the defense sector, you have confidential communication networks that are very similar to those from AT&T or Verizon. So, all these markets have the same requirements and the same features and challenges.”
“Probably the number one reason why people put in a Stratum 1 NTP time server is to make sure that their log file time stamps are accurate,” said Skoog, “because that makes their network management systems more accurate and reliable.” However, accuracy is not the only concern. “The clocks are pretty accurate, but they connect to the network. All the network guys — the people who manage these networks — cannot plug this clock in until the security people give their stamp of approval.”
Microchip Technology’s Precise Time Scale System (PTSS) is traceable to Universal Coordinated Time (UTC) and does not depend on GNSS.
Clocks and oscillators
For all these accuracies, the key mechanism is GNSS timing. “In a typical data center,” said Gao, “you’re going to start with two grandmaster clocks, which are boxes that combine GNSS timing with locally accurate timing. That’s probably going to provide 5 ns to 10 ns of accuracy. More importantly, in addition to that, they have extremely good local oscillators that could be OCXOs, even some atomic clocks, that enable them to hold over if they lose GNSS timing for four, five hours, or 10 hours — up to 24 hours or 48 hours for a huge facility with many AI clusters.”
Likewise, many financial services units don’t have GNSS antennas for every server, router and network card. “It just gets tremendously expensive to distribute the signal to each server,” said Gao, “because most of them are housed in huge warehouses that don’t have access to an antenna. They typically have a grandmaster clock.”
“The GPS receiver itself is one product for all the segments that we sell into, but configured depending on how many timing outputs the customer wants and which frequency outputs,” said Tommey. “We also put a holdover oscillator into the unit that — if, for whatever reason, the GPS signal is lost — continues to provide valid time outputs for days, weeks, or even months.”
“The advantage of GNSS is that over a long period of time it is extremely accurate,” said Gao. “The accuracy of an oscillator depends on how much holdover time you require. GNSS has a natural resolution of roughly 20 ns. At 5 ns, you start to rely on your local oscillator to do the next level filtering. For a base station or a core router, you need to get to 5 ns or better. So, you have GNSS native, you have an oscillator to do filtering to get a better accuracy and holdover, then you have network-based timing in a time scale of some sort.”
“A data center, core network, or edge network never relies on a single source for timing,” said Gao. “GNSS is always viewed as extremely stable timing that everybody needs when you have access to the receiver and the antenna. Then you rely on the local oscillators and 1588 network timing as complementary technologies to ensure that you will always have timing all the time at a given accuracy.”
Networks
Increasingly, timing is distributed over a network. Some markets are more focused on Network Time Protocol (NTP), which has an accuracy of a few milliseconds, while others, such as telecoms, are more focused on Precision Time Protocol (PTP), which follows IEEE standard 1588 and is traceable all the way to a grand master somewhere. If someone just needs NTP, “it’s pretty easy to get 1 µs to 10 µs time accuracy between an NTP server and an NTP client,” said Skoog. “They may not even need 1 µs to 10 µs, but they’re going to take it if they get it, because log file correlation is very useful. Then when you get to PTP, it brings in a lot of hardware, time stamping and on-path assistance to get rid of some of that asymmetric delay. Now you’re down to sub-microseconds, and even approaching low nanoseconds. Then, if you must be down to 1 ns or something smaller, you’re into a 1 PPS application.”
PFT3207A GNSS receivers in 1+1 configuration with a ptf1207A redundancy switch to provide timing and frequency reference signals to sub-systems in a satellite Earth station installation.
Jamming and spoofing
Any infrastructure that must always be in service requires redundancy and resiliency. “We build rubidiums, cesiums, hydrogen masers and so forth,” said Skoog. “For years, the cesium was the domain of the metrologist. Those days have passed. Sure, metrologists buy them. But you need a plan B for what you’re going to do if GPS goes away, so you can connect pretty much all our products to a cesium clock.”
When it comes to the impact of jamming and spoofing on timing, perspectives vary substantially between companies. “We’ve only ever had one customer who thought they’d been jammed or spoofed,” said Tommey. “We honestly don’t see very much of that at all.” However, according to Still, in the United States, a common problem is the proliferation of personal GPS jammers. “You see this through people with corporate vehicles and a fear of being tracked — similar to the rise of VPNs. Our power distribution systems, our substations, our telco central offices are in the communities they serve.” The problem arises, for example, “at substations located next to truck stops, night clubs, bars, all the different places that folks might not want to have pop up on their corporately tracked vehicles.”
Often, when network operators see anomalies on their GNSS-based timing systems, it is challenging for them to identify and effectively mitigate the source of that interference. “You can naturally go to the site and try to do audits, and there are tools to try to measure and monitor this,” said Still. “What is more common and practical for network operators is designing and deploying their GNSS networks with the expectation that they’re going to encounter some form of interference.”
Current wars have spurred great interest in distribution of timing over optical networks, said Colard. “Close to Russia, China, Israel, any of the conflicts in the world, there have been attacks on these networks every day. Spoofing is the main concern that I’ve seen. Anti-spoofing or anti-jamming are not enough. You need to find alternate time references for when GPS fails for any reason, so it’s an architecture discussion. For example, assisted partial timing support (APTS) has been used for years. It connects to other PTP grandmasters in the network and provides PTP input while GPS is down. Another alternative is to rely less and less on GNSS in general.
“The alternative to using GPS receivers everywhere is to limit them to very specific strategic points and distribute time over optical networks,” said Colard. “There are segments of hundreds of kilometers in many countries without any GPS receivers. There are also enhanced primary reference time clocks (ePRTCs), which are usually connected to GPS and cesium clocks for resiliency. Often, carriers now are not even using GPS there. They’re using metrology labs and the national time coming from NIST or similar national time agencies as the time reference, instead of GPS, to limit the use of GPS as much as possible across the network.”
A traditional GNSS-based clock for time-division multiplexing (TDM) services in a telecom’s central office.
Multipath
As with the impact of jamming and spoofing, perspectives vary regarding the impact of multipath on timing. “We haven’t seen issues with multipath, except where users don’t do a good job of positioning their antenna or antennas,” said Tommey. Conversely, Gao said that “multipath is extremely relevant to timing. Let’s say, to give an extreme example, that you’re locking onto a single satellite. Depending on whether you have an unimpeded line of sight and no multipath or the signals are bouncing off a building, the difference could be 100 ns to 500 ns.”
“Multipath might be a problem in a GPS antenna for timing, which usually sits on the roof,” said Skoog. “If you can keep this signal from reflecting up to the antenna in the first place with an adequate ground plane, that’s probably the singularly most effective thing you can do. I’ve been in GPS a long time. It used to be a very big deal. I never get asked about it anymore. It’s an old problem that’s sort of been solved.”
Many people who have static antennas do not understand “that their sky view changes over the course of the year, and their visibility throughout the seasons and the winter solstice will be different than in the summer,” said Still.
Transition
The telecom industry is transitioning how it times and synchronizes networks from the time-division multiplexing (TDM) method that it has used for decades to IP and packet-based networks. “Particularly in TDM networks, the idea of UTC-traceable time of day was not really a focus until the advent of NTP, but ultimately it was all frequency synchronization,” said Still. “The idea was that if your network was in a frequency lock, and the phased alignment was good, your network would all drift together. So, TDM networks were also inherently synchronous, in a Synchronous Optical Networking (SONET) environment. You can distribute that frequency again throughout your network and pull it down from the overhead. By comparison, packet networks are inherently asynchronous, so it breaks the frequency chains that we’ve long relied on to distribute and synchronize our networks, and ultimately requires a new approach.
“Modern networks and applications are increasingly reliant on precision time from GNSS-derived sources — high speed, low latency, high throughput, all being deployed to meet current and future needs,” said Still. This requires new sources of time, such as UTC-traceable time of day. Global networks and edge applications will all rely on time of day. “Not only are you trying to keep all your own networks synchronized, you must also have a relative accuracy to the rest of the world. So, some significant changes are taking place, particularly for engineers who have spent their whole career on TDM or SONET networks.”
Now, Still said, “we can be more accurate using PTP on the edge than we can be with GPS. On the edge GPS now is an option. We keep those in place, distributed throughout the network, in case of bi-directional fiber cuts or losing some of the transport that we use to distribute precision timing, but you can be more accurate, more secure and more stable by using PTP than we can by relying on GPS.”
Conclusions
GNSS timing receivers are central to timing vast swaths of our industrial societies. Yet, as with positioning and navigation, growing concerns about jamming and spoofing are motivating some sectors to reduce their reliance on GNSS for timing and to develop alternative time references, including low-Earth orbit (LEO) satellites and eLoran. Meanwhile, many networks are transitioning to a new way of distributing timing.
Building a solid foundation for any construction requires that the ground be adequately compacted and leveled. Construction workers and contractors operating earthmoving machines know it is nearly impossible to do that by eyesight alone. For a few decades, leveling was accomplished using rotating lasers mounted on tall tripods, which could typically cover a little more than 1,500 ft on a job site and laser receivers mounted on masts on the earth-moving machines. However, these systems only provide elevation, not position, and must be repositioned frequently.
Photo: Steer
In recent years, laser leveling has been increasingly replaced by machine control systems that enable operators to compare the position of their machine’s blade with a digital grading map, and then guide it very precisely to cut the proper elevation. These machine control systems combine global navigation satellite system (GNSS) receivers, to provide the position of the machine; inertial navigation systems (INS), to bridge short gaps in GNSS availability and to provide the platform’s attitude (pitch, roll, and yaw); and a variety of other sensors, to determine the movement of the machine’s attachments, such as booms, arms and buckets.
In this month’s cover story, we feature perspectives on machine control from:
Microchip, which makes inductive position sensors that monitor the angular and linear movements of the attachments.
Septentrio, which makes the AntaRX series of smart antennas.
Besides grading, other areas for machine control include trenching at a specific depth, spot-bulldozing to better prepare a site for grading, mass excavation and contouring edges. Artificial intelligence (AI) will soon start taking over the operators’ duties, but that’s for a future article.
Controlling an earthmoving machine to perform a task requires knowing exactly where its bucket or blade contacts the dirt. Therefore, in addition to knowing the machine’s position, it is necessary to model, in real-time, the rotation at each pivot point and apply some mathematics and trigonometry.
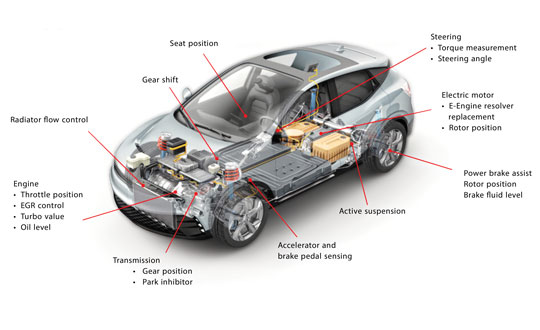
Microchip makes an integrated circuit, known as an inductive position sensor, that is very well suited for machine control because it is not affected by the harsh conditions on most construction sites — temperature extremes, water, dust and dirt — and the vibrations caused by the machine itself. Additionally, it is not affected by the stray magnetic fields generated by electric motors, which are increasingly common on those machines.
Inductive position sensors are used in many automotive systems. (Photo: Microchip)
“We use our inductive position sensing to measure the angle or the linear movement of some sort of target to get a machine to perform its task,” said Mark Smith, product line manager for many different mixed signal products at Microchip. “For example, to control a blade on an earthmoving machine to do something, you need to have feedback about its current angle.”
Microchip also makes sensors for human interfaces, such as accelerator pedals in cars, which no longer have cables that run up to the motor. “Any sort of movement, such as the angles of rotation of a robotic arm, must be monitored and measured. Inductive position sensing is one of the up-and-coming ways to do it,” said Smith.
To direct a task, a central processing unit must then analyze and integrate the data from the sensors. For that, Microchip makes many types of computing elements — including mini-computers and microcontrollers.
“One of the things that’s coming up with many of these vehicles is ambient magnetic noise in the system,” said Smith, “because you’re next to electric motors these days. You want sensors that are immune to stray magnetic fields. We started with automotive, but we’re also seeing it now in industrial environments, including earthmoving vehicles.” Inductive position sensors, Smith said, are simpler, cheaper, lighter, and better able to withstand extreme temperatures than what they are replacing. “Also, because they are non-contact, the circuit board can be environmentally protected.”
Vibrations also are a concern. “There is an air gap between the target and the sensor itself,” Smith said. “We have an automatic gain control at the sensing side that is constantly adjusting the gain to get the maximum signal strength. This is a fast-moving control algorithm that can adjust the gain to ensure that the vibration does not affect the performance. When everything is operating at its maximum torque, this starts to matter.”
GPS World Editor-in-Chief, Matteo Luccio, met with Will Krzewick, Principal Engineer Product Marketing, Microchip Technology, to discuss remote sensing, new atomic clocks, and more products featured at their booth at ION GNSS+ 2023.
A roundup of recent products in the GNSS and inertial positioning industry from the August 2023 issue of GPS World magazine.
SURVEYING & MAPPING
Laser Scanner With several integration options
The VQ-840-G is a fully integrated compact airborne laser scanner designed for combined topographic and bathymetric airborne and UAV-based surveying. The system is offered with an optionally integrated and factory-calibrated inertial measurement unit/GNSS system and can be complemented with an optional camera or IR rangefinder. It also has an optional integrated inertial navigation system. The scanner carries out laser range measurements for high resolution surveying of underwater topography with a narrow, visible green laser beam, emitted from a pulsed laser source. The VQ-840-G has high spatial resolution due to a measurement rate of 200 kHz and high scanning speed of up to 100 scans/second. Riegl, riegl.com
Laser Scanning System A versatile reality capture solution suitable for surveying, construction and engineering users
The X9 is designed to enhance performance in more environments while leveraging Trimble’s X-Drive technology for automatic instrument calibration, survey-grade self-leveling and laser pointer for georeferencing. The X9 expands on Trimble’s X7, delivering longer range, higher accuracy, shorter scan times and sensitivity, improving scan results. Advanced processing and a high-performance laser increase the sensitivity of all scans, enabling the X9 to capture difficult dark or reflective surfaces. A new center unit design also improves signal transmission for better scan quality. The X9 provides accurate and dependable data, enabling confident decision making both in the field and in the office through in-field registration with Trimble Perspective and FieldLink software by minimizing the need for target deployment. The auto-calibration eliminates the need for annual calibration. In addition, the X9 includes survey-grade self-leveling with the industry’s widest compensation range for fast, easy setup. The X9 data can be delivered directly from the Perspective or FieldLink software to Trimble’s office software — including the Realworks 3D scanning software — business center office software, SketchUp and Tekla, or exported to industry-standard formats to produce application-specific deliverables. Trimble, trimble.com
Survey Cameras For photogrammetric applications and to complement lidar survey data
The C5 and C30 orthographic and oblique cameras are designed for aerial surveys. The systems provide high-quality imaging solutions for photogrammetric applications and to complement lidar survey data. The C5 camera is an efficient and lightweight system for aerial surveys, weighing 290 g for increased flight endurance. Its compact size of 75 mm x 63.5 mm x 102.5 mm allows easy integration into UAVs. The C30 camera’s weight is 600 g with a size of 110mm x 108 mm x 85 mm. The C30 is also designed for aerial surveying. The C5 and C30 cameras’ universal installation design makes them compatible with a wide range of fixed-wing and rotor UAV platforms. Both cameras are supported by the CHCNAV’s BB4 Mini and P330 Pro UAVs as well as the DJI’s M300 RTK. The C5 and C30 cameras give maximum flexibility for photogrammetric applications. They can be used independently on real-time kinematic-enabled UAVs to capture high-resolution imagery or installed directly on the CHCNAV’s lidar series to colorize point cloud data. This feature allows seamless imagery and lidar data integration for a more complete view of the surveyed area. CHC Navigation, chcnav.com
GNSS Palm RTK For surveying and mapping, GIS and more
The T20 is light, weighing 0.68 kg, and has low power consumption with 12 hours of battery life. It integrates functions such as a GNSS module, datalink module, 4G, 5.0 dual-mode Bluetooth, data memory system and more. Powered by the SinoGNSS K8 high precision module, the T20 has 1,590 channels and can track all running and planned constellations including GPS, BDS, GLONASS, Galileo, QZSS and satellite-based augmentation systems. Additionally, the anti-interference algorithm enables the T20 to maintain accurate positioning and perform well in complex environments, providing surveyors with high-quality measurements. The T20 is equipped with a third-generation inertial measurement unit from ComNav, which can be tilted and measured at an angle up to 60°. The T20 is also equipped with a U50 datalink module, which enables it to switch between base and rover. The T20 is compatible with mainstream real-time kinematic receivers on the market. ComNav Technology, comnavtech.com
Hybrid Imaging and Lidar Sensor Designed for airborne mapping
The CountryMapper is designed for large-area imaging and lidar mapping. Combining a large-format photogrammetric camera with a high-performance lidar unit into a single system, the CountryMapper collects foundational geospatial data simultaneously to support a wide variety of user applications. The CountryMapper combines imaging and lidar sensor modules into a highly efficient hybrid airborne system. The sensor features CMOS-based Leica MFC150 camera modules that leverage true mechanical forward-motion-compensation to deliver high image quality. The sensor’s new Hyperion3 lidar unit features 60° field of view, improving the performance and flexibility of the system compared to previous lidar modules, while reduced laser divergence provides greater planimetric accuracy and better foliage penetration. The CountryMapper fully integrates with Leica HxMap multi-sensor end-to-end processing workflow, enabling distributed processing of images and point clouds to optimize productivity for very large data sets. The CountryMapper supports applications such as orthophoto generation, terrain mapping, hydrography, forestry monitoring and infrastructure management. Users of previous-generation sensors can leverage their initial investment and upgrade their systems to the CountryMapper configuration. Leica Geosystems, leica-geosystems.com
MOBILE
GNSS Network Rover Complete with an integrated MEMS IMU
The Triumph-3NR (T3-NR) is a small, lightweight GNSS network rover with more than 25 hours of run time on a single charge. The T3-NR easily connects to real-time networks for corrections to get GNSS real-time kinematic with inertial measurement unit tilt compensation. The network rover has 874 channels and can track all constellations. It features an internal GNSS antenna, Wi-Fi, Bluetooth, and is USB compatible. The T3-NR is suitable for demanding industrial applications. JAVAD, javad.com
Antennas Suitable for lawn mowers and other mobile applications
The HX-CSX014A is a high gain, low profile and compact antenna with a new structure that simplifies integration into lawn mowers and minimizes the overall machine dimension. It features small size, high sensitivity and low power consumption. The HX-CSX231A, is a ready-to-use GNSS antenna with a highly reliable structure that makes it small and lightweight. It exhibits 4.5 dBi high gain performance with ultra-low signal loss. It also delivers wide beam width that covers wide frequencies with high marginal gain, a perfect option in complex environments. Additionally, the HX-CSX231A’s advanced LNA features improved signal filtering, out-of-band rejection, restrained unwanted electromagnetic interferences and a strong multi-path reduction capacity. Harxon, en.harxon.com
DEFENSE
PNT Device Enables dismounted maneuver operations even where GPS is compromised or denied
The TRX DAPS II provides assured positioning, navigation, and timing (PNT) to dismounted users by disseminating assured position and time to dependent devices in GPS-challenged environments. TRX DAPS II fuses inputs from M-code GPS, inertial sensors, and complementary PNT sources. It is a small, lightweight PNT device that supports both standalone operation and integration with the Nett Warrior ensemble. It also can distribute PNT information to a customized tactical watch. The TRX DAPS II solution employs a modular architecture and adheres to Army PNT interface standards, facilitating the addition of new PNT sensors as threats evolve. This device will be in production for the Army later this year. TRX Systems, trxsystems.com
TIMING
Image: Microchip Technology
Atomic Clock Maintains system synchronization when GNSS signals are denied
The 5071B cesium atomic clock can perform autonomous time keeping for months in the event of GNSS denials. This device is the next-generation commercial cesium clock to the 5071A. The 5071B is available in a three-unit height, 19-in rackmount enclosure, providing a compact product to work in environments where it can be easily transported and secured versus a larger alternative designed specifically for laboratory environments. The 5071B has upgraded electronic components to address possible obsolescence or non-RoHS circuitry. The clock provides 100 ns holdover for more than two months, maintaining system synchronization when GNSS signals, such as GPS, are denied. As a cesium beam tube product with no deterministic long-term frequency drift, the 5071B provides absolute frequency accuracy of 5E-13 or 500 quadrillionths over all specified environmental conditions for the life of the product. For military applications requiring rapid deployments for system radars, 5E-13 stability eliminates the need for the acquisition of external synchronization sources prior to radiating. Microchip Technology, microchip.com
OEM
GNSS Positioning Modules
For multiple applications
automation of moving industrial machinery, and the ZED-F9P-15B provides customers in the mobile robotics market with an L1/L5 option in addition to the L1/L2 bands. These two modules are based on the u-blox F9 high-precision GNSS platform. The NEO-F9P and the ZED-F9P-15B GNSS modules feature concurrent reception of GPS, Galileo, and BeiDou; multi-band L1/L5 real-time kinematic; short convergence times; and reliable performance. The modules deliver centimeter-level accuracy in seconds and come in small, high-precision form factors.
Its small size, coupled with very low power consumption and ANN-MB1 antenna compatibility, makes the NEO-F9P suitable for a wide range of uses. Offering reliable and efficient positioning, the module supports open as well as standards-based correction services for enhanced performance, such as the u-blox PointPerfect GNSS augmentation service. u-blox, u-blox.com
Image: Septentrio
GNSS Receiver Module
Features built-in AIM+ technology for interference mitigation
The mosaic-X5 is a multi-band, multi-constellation GNSS receiver in a low power surface mount module with a wide array of interfaces. It is designed for mass market applications such as robotics and autonomous systems — capable of tracking all GNSS constellations, supporting current and future signals. The mosaic-X5 has an update rate of 100 Hz, is easy to integrate, and is optimized for automated assembly. The mosaic-x5 is suitable for autonomous vehicles, logistics and port operations, mining and construction, precision agriculture, rail, robotics, surveying and mapping, UAVs and more. Septentrio, spetentrio.com
Microchip Technology has released the 5071B cesium atomic clock that can perform autonomous timekeeping for months in the event of GNSS denials.
The 5071B is the next-generation commercial cesium clock to the 5071A. The 5071B is available in a three-unit height, 19-inch rackmount enclosure, making it a compact product for environments where it can be easily transported and secured.
The 5071B has upgraded electronic components to address possible obsolescence or non-RoHS circuitry. The clock provides 100 ns holdover for more than two months, maintaining system synchronization when GNSS signals, like GPS, are denied.
As a cesium beam tube product with no deterministic long-term frequency drift, the 5071B provides absolute frequency accuracy of 5E-13 or 500 quadrillionths over all specified environmental conditions for the life of the product. For military applications requiring rapid deployments for system radars, 5E-13 stability eliminates the need for the acquisition of external synchronization sources prior to radiating.
The 5071B is now fully compliant with the Restriction of Hazardous Substances Directive, making this device available in regions where regulatory policies are in place.