A GNSS receiver is scheduled to land on the Moon in 2023, sent by NASA and the Italian Space Agency (ASI). The innovative GPS and Galileo receiver, provided by Qascom, will experiment with satellite-based positioning on the lunar surface.
The project, dubbed NEIL (Navigation Early Investigation on Lunar surface), is at the center of an agreement between ASI and NASA, linked to the CLPS 19-D mission (NASA’s Commercial Lunar Payload Service, Task Order 19).
The NEIL payload will be integrated into the Lunar GNSS Receiver Experiment (LuGRE), an ASI/NASA cooperation framework to develop activities in lunar and cislunar environments.
For the first time in history, GNSS positioning will be tested at almost 400,000 kilometers from Earth. The previous limit was a distance of 200,000 kilometers, tested in the Magnetospheric Multiscale (MMS) project.
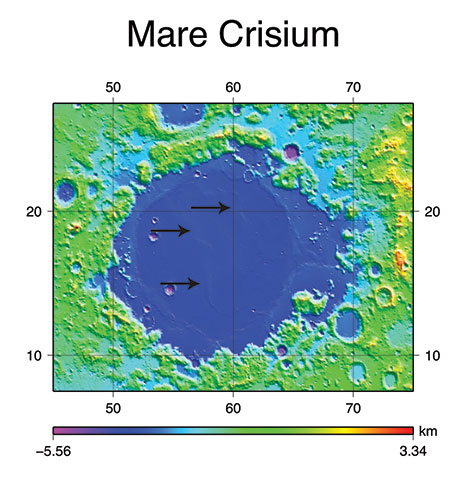
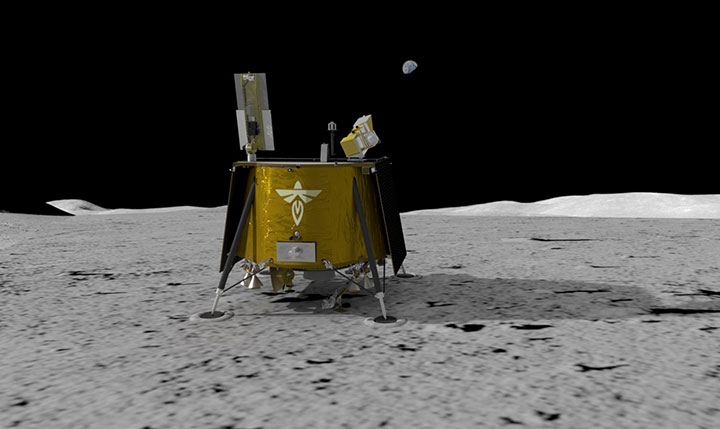
NEIL will be integrated on the NASA’s Blue Ghost lunar lander in 2022. In addition to the NEIL payload, nine other experiments will land on the Moon. The mission is expected to be launched via a SpaceX Falcon 9, and the lander with aim for the Mare Crisium basin.
Image: NASA/Resse Patillo
Moon-Hardened Receiver
Under an ASI contract, Qascom will develop the dual-frequency GPS and Galileo receiver, as well as the entire radiofrequency chain (antenna, LNA, filters), all of which can withstand the extreme environmental conditions of the Moon.
The GPS and Galileo signals received from NEIL will be extremely weak due to the distance from Earth, and will be processed with specific algorithms allowing to calculate position and time, even if with reduced accuracy, both during the Moon transfer orbit and on its surface.
Image: NASA
“This experiment is of strategic importance for Italy, since it will bring our technology to the Moon surface,” stated the Italian Space Agency. “It contributes to strengthening the competitiveness of the Italian space sector and consolidates the strong collaboration between the Italian Space Agency and NASA in the satellite navigation segment as well as in the future Moon and Mars missions.”
NEIL provides also an important technical and scientific contribution to study how GPS and Galileo could be used for positioning and timing in future Moon missions, including for example the deployment of lunar satellite constellations, lunar rovers, the lunar space station Gateway and the infrastructures that are going to be developed in the frame of Artemis programs. The raw measurement collected will be used by the research community to study the lunar and cislunar environment and evaluate the future use of GNSS to support permanent missions.
Soon, global navigation will no longer suffice. Humanity is preparing to return to the Moon after more than half a century. U.S., European, Chinese, Indian, Japanese and Russian governments and companies want a slice of the “eighth continent.”
NASA’s Artemis program, which aims to put astronauts on the Moon’s south pole in 2024, will explore more of the lunar surface than ever before. Robots and humans will search for, and potentially extract, resources such as water, which also can be converted into other usable resources, including oxygen and fuel.
Astronauts searching for spots where robotic spacecraft have pointed to the ice on the lunar map and for equipment sent on ahead of them will need precise navigation guidance. So will astronauts and ground controllers operating the Gateway outpost in Moon orbit and the Orion spacecraft. This will require extending the reach of our Earth-centric positioning, navigation and timing (PNT) systems to cover our planet’s nearest neighbor.
A permanent and reliable source of PNT on the Moon will reduce the amount of gear each mission will have to develop and carry, making more funding and rocket-lift capabilities available for scientific equipment. It also will free bandwidth on NASA’s communications networks, which have historically provided navigation services near the Moon.
NASA and the European Space Agency (ESA) are laying the foundations for this navigation system. Their efforts include the development of a special receiver able to pick up GPS signals that, already very weak on Earth, are extremely so on the Moon; NASA’s LunaNet communications and navigation architecture; ESA’s public-private Pathfinder satellite navigation and communication mission, due to launch into lunar orbit by the end of 2023; and ESA’s Moonlight initiative, which will establish lunar communication and navigation services.
Studies already have proven that it is possible to navigate between Earth and the Moon, as well as on the latter’s surface, using the side lobes of the signals from GNSS satellites. In 2023, the Lunar GNSS Receiver Experiment (LuGRE), developed in partnership with the Italian Space Agency, will demonstrate and refine this capability on the Moon’s Mare Crisium basin. NASA will use data gathered from LuGRE to refine operational lunar GNSS systems for future missions.
Besides the low signal power, other challenges to using GNSS satellites for Moon navigation include geometry, with all the signals coming from a relatively small portion of the sky; the fact that in polar regions the Earth would be low on the horizon and therefore GNSS signals could easily be blocked by hills or crater rims; and the complete occultation of the signals when moving beyond the side of the Moon always facing Earth. Meeting this last challenge will require at least a couple of Moon-orbiting satellites. (Artificial satellites orbiting our planet’s natural satellite as a supplement to the artificial satellites orbiting our planet…)
The Moon will be our steppingstone to Mars. I bet it will not be long before the Institute of Navigation establishes a Planetary Navigation division!
Spire Global, a global provider of space-based data and analytics, has announced the continuation of its participation in NASA’s Commercial Smallsat Data Acquisition (CSDA) Program with a $6 million contract extension.
The contract continuation, Task Order 6 (TO6), is a subscription data solution that includes radio occultation (RO) data, grazing angle GNSS-RO, total electron content (TEC) data, precise orbit determination (POD) data, soil moisture and ocean surface wind speed GNSS-Reflectometry data and magnetometer data.
This data will be available to all federal agencies, NASA-funded researchers and, more broadly, to all U.S. government-funded researchers for scientific purposes.
Under CSDA Program TO6, Spire will deliver a comprehensive catalog of data, associated metadata and ancillary information from its Earth-orbiting small-satellite constellation. The company operates its constellation in low Earth and collects upwards of 10,000 radio occultations per day with consistent global coverage.
For TO6, Spire will provide rolling access to 12 months of radio occultation data with a 30-day latency. This data will be archived and maintained by NASA under the CSDA Program’s SmallSat Data Explorer (SDX) database.
“Programs like CSDA highlight the incredible potential of private-public partnerships in the federal government to drastically accelerate our ability to confront some of the greatest challenges of our time, such as climate change,” said Peter Platzer, CEO of Spire. “With the end-user license agreements, our data is now available to all federal agencies and the larger NASA scientific community to help support Earth observation research across fields.”
The program includes end-user license agreements (EULAs) to enable broad levels of dissemination and shareability. All federal agencies and U.S. government-funded researchers will have access to Spire’s data for scientific purposes under TO6 and will be able to request access to the data via the CSDA Program’s Commercial Datasets webpage.
“At NASA, the CSDA Program has continued to blossom as a valuable resource to our team for our Earth observation research and analysis. We are committed to growing the program as well as continuing the work we have started,” said Will McCarty, project scientist at the CSDA Program and research meteorologist at NASA Global Modeling and Assimilation Office. “Spire has been a valued partner through CSDA’s development since its inception, and with this additional task order, we are excited about the new insights and results that will come not only from within NASA, but also through broader collaboration through the domestic government scientific community.”
NASA has used Spire data in its research on water and sea-ice levels in the polar regions, the height of the planetary boundary layer (PBL), and the day-to-day variability of thermospheric density at flight level.
NASA also noted that Spire data has shown positive benefit to its GEOS Atmospheric Data Assimilation System, which uses space-based data to analyze the Earth’s atmosphere and assimilate the data into its Earth observation systems.
As one of the original vendors for the CSDA Program, Spire provides NASA yearly updates to the scope of work under this agreement to ensure alignment of data to the agency’s needs.
Spire Global, a global provider of space-based data and analytics, has announced the continuation of its participation in NASA’s Commercial Smallsat Data Acquisition (CSDA) Program with a $6 million contract extension.
The contract continuation, Task Order 6 (TO6), is a subscription data solution that includes radio occultation (RO) data, grazing angle GNSS-RO, total electron content (TEC) data, precise orbit determination (POD) data, soil moisture and ocean surface wind speed GNSS reflectometry (GNSS-R) data and magnetometer data.
This data will be available to all federal agencies, NASA-funded researchers and, more broadly, to all U.S. government-funded researchers for scientific purposes.
Under CSDA Program TO6, Spire will deliver a comprehensive catalog of data, associated metadata and ancillary information from its Earth-orbiting small-satellite constellation. The company operates its constellation in low Earth orbit and collects upwards of 10,000 radio occultations per day with consistent global coverage.
For TO6, Spire will provide rolling access to 12 months of radio occultation data with a 30-day latency. This data will be archived and maintained by NASA under the CSDA Program’s SmallSat Data Explorer (SDX) database.
“Programs like CSDA highlight the incredible potential of private-public partnerships in the federal government to drastically accelerate our ability to confront some of the greatest challenges of our time, such as climate change,” said Peter Platzer, CEO of Spire. “With the end-user license agreements, our data is now available to all federal agencies and the larger NASA scientific community to help support Earth observation research across fields.”
The program includes end-user license agreements (EULAs) to enable broad levels of dissemination and shareability. All federal agencies and U.S. government-funded researchers will have access to Spire’s data for scientific purposes under TO6 and will be able to request access to the data via the CSDA Program’s Commercial Datasets webpage.
“At NASA, the CSDA Program has continued to blossom as a valuable resource to our team for our Earth observation research and analysis. We are committed to growing the program as well as continuing the work we have started,” said Will McCarty, project scientist at the CSDA Program and research meteorologist at NASA Global Modeling and Assimilation Office. “Spire has been a valued partner through CSDA’s development since its inception, and with this additional task order, we are excited about the new insights and results that will come not only from within NASA, but also through broader collaboration through the domestic government scientific community.”
NASA has used Spire data in its research on water and sea-ice levels in the polar regions, the height of the planetary boundary layer (PBL), and the day-to-day variability of thermospheric density at flight level.
NASA also noted that Spire data has shown positive benefit to its GEOS Atmospheric Data Assimilation System, which uses space-based data to analyze the Earth’s atmosphere and assimilate the data into its Earth observation systems.
As one of the original vendors for the CSDA Program, Spire provides NASA yearly updates to the scope of work under this agreement to ensure alignment of data to the agency’s needs.
19% of tracked space objects threaten GPS and other GNSS satellites. While there are many fewer objects in MEO than in LEO, the risk in the former is arguably greater because GPS is so critical to almost all of our technology.
The Risk
GNSS satellites, especially GPS satellites, are critical to the well-being and smooth functioning of economies and national security. This is especially true in Europe and the United States, which do not have complementary terrestrial systems able to provide vital positioning, navigation and timing (PNT) services when signals from space are not available.
While the probability of debris damage to GNSS in medium Earth orbit (MEO) is much less than for satellites in low Earth orbit (LEO), the consequences of such an event would be much, much higher. The loss of one satellite would be a concern; that of multiple satellites, a major problem. The unthinkable chaos, national security damage, and severe economic impacts to the $21 trillion U.S. GDP make the risk unacceptable.
For those who think we need not worry about the low probability of collisions at MEO, the Galileo collision avoidance maneuver in March 2021 should be a wakeup call. The problem is here. We need to act now.
Background
Much like a nuclear fission reaction, the problem of space debris starts small then grows exponentially, as each collision creates more pieces that, in turn, can collide with other objects.
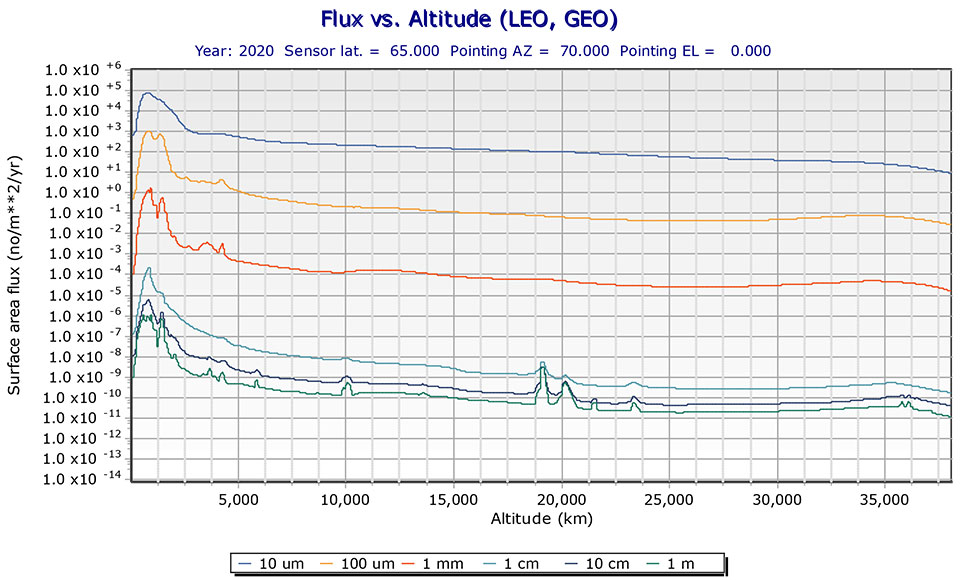
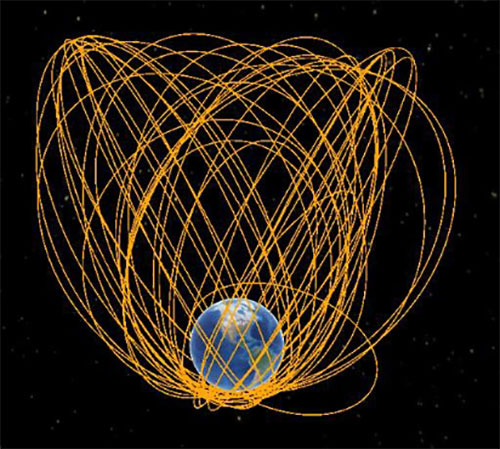
The MEO debris environment is 100 times less dense than the LEO. The spatial density of orbital debris in LEO (up to 2,000 km), shown in Figure 1, suggests that LEO is the likely location where a runaway chain reaction will initiate. This could easily result in a region of space so dangerous that it would effectively deny access to MEO, where the GPS constellation resides.
While the debris situation at MEO is much better, there are still 4,021 tracked debris objects that could impact GPS and other GNSS satellites. Because future orbital debris collisions in LEO will be responsible for more debris in MEO, the situation is guaranteed to get worse. The dead and debris objects in highly elliptical, or Molniya, orbits, shown in Figure 2, could be responsible for such collisions pushing LEO debris into MEO.
Contributions to the general MEO debris population come from launch systems and other factors. Early GPS satellites (Block II/IIA/IIR) used internal orbital-insertion motors to avoid leaving uncontrolled stages in the operational orbit range when moving from transfer orbit to MEO. For survivability reasons, they were also deployed with sufficient fuel to make several major orbital moves. Unfortunately, later versions used separate orbital-insertion stages, which were left drifting in the orbital neighborhood and carried less fuel, resulting in fewer possible maneuvers to avoid collisions.
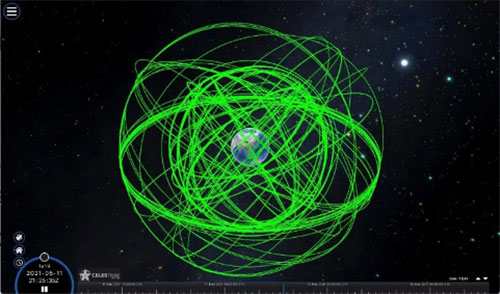
Using the CelesTrak visualization interface to extract space situational awareness data captured by the Combined Force Space Component Command’s 18th Space Control Squadron (18 SPCS) reveals a much more dire image of MEO. Of the 21,266 total tracked objects in Earth’s orbit, 157 are active GNSS satellites, as shown in Figure 3.
Figure 3. Active GNSS satellites. (Image: Celestrak)
However, a total of 4,021 objects reside or pass through MEO, which are either active (331), dead (668), debris (1,761), rocket bodies (1,100) or unknown (161) objects, as shown in this video.
These 4,021 objects represent 19% of the total number of tracked objects from the 18 SPCS space catalog. While the total 21,266 tracked objects is a far cry from the 100 million objects NASA’s Orbital Debris Program Office represents, one can imagine that a significant portion of untracked debris objects, under 10 cm in size, reside or pass through MEO as well. This is significant, according to NASA, which says that objects with a diameter of 1 cm to 10 cm are the most dangerous due to the lack of tracking data, which essentially makes them invisible.
False Sense of Security
The growing orbital-debris concern is a threat too big to ignore. Unfortunately, to date attempts to manage space traffic have amounted to passive measures, such as establishing policy, characterizing the environment, and creating orbital protection guidelines. Even the highly touted, $6 billion U.S. “Space Fence” is a passive measure that contributes nothing active to solve the problem. Not at all a “fence,” it is merely a way to detect the larger and more dangerous debris.
These efforts may, in all actuality, be counterproductive if they instill a false sense of security in the public and government leaders that the problem is being adequately addressed.
A Proactive Solution
Since 1978, the orbital debris population has been touted as our biggest space problem. It is important to do as much as we can with policies and procedures to keep the problem from getting worse faster. However, even if we humans were to completely resist our seemingly natural impulse to pollute everywhere we go, collisions with existing debris would continue to increase the number of dangerous objects in orbit.
Active debris removal (ADR) is the only solution. The sooner it begins, the safer we will all be. Like the oceans and cyberspace, orbital space suffers from the tragedy of the commons. Everyone wants to use it, but no one owns it. No one is responsible for ensuring it is cared for and maintained. As a result, user behavior is difficult to control, and the environment often suffers. Government action, presumably supporting the best interests of all users, is the default answer.
The proposed Space Debris Act of 2021 is a great start. It paves the way for persistent funding and creates an industry responsible for safeguarding humanity’s orbital infrastructure. It would introduce tax credits to incentivize non-government funding contributions and reduce the price of debris removal, so that satellite operators and the emerging space tourism industry can afford to clean up space where they plan to operate.
The bill is currently being presented by OrbitGuardians to members of Congress for sponsorship. Organizations wishing to support these efforts should contact Ken Eppens at OrbitGuardians at [email protected].
GPS/GNSS and other critical space assets are at an unacceptable level of risk from debris. It is time to safeguard orbital infrastructure to protect the interests of the United States and humanity’s future in space.
$50K prize purse for solutions to advance computer vision for time-sensitive mapping
The National Geospatial-Intelligence Agency (NGA), Johns Hopkins University Applied Physics Laboratory and NASA have launched a crowdsourcing competition, the “Overhead Geopose Challenge,” which is being implemented by DrivenData and HeroX.
The challenge seeks solutions that make overhead images more useful for time-sensitive applications like security and disaster response. Participants are competing for a prize purse of $50,000. To accept the challenge, visit this website.
The challenge seeks to build computer-vision algorithms that can effectively model the height and pose of ground objects for monocular satellite images taken from oblique angles.
Overhead satellite imagery provides critical time-sensitive information for disaster response, navigation, and security. Most current methods for using aerial images assume that the images are taken from directly overhead.
However, the first images available are often oblique. These camera orientations complicate useful tasks like image alignment and change detection that are needed to ensure that maps are accurate in dynamic environments.
Solvers will transform RGB images taken from a satellite to accurately determine each object’s real-world 3D structure or “geocentric pose.” Geocentric pose is an object’s height above the ground and its orientation with respect to gravity. Calculating geocentric pose helps with detecting and classifying objects and determining accurate object boundaries.
NGA is continuously seeking novel concepts for assured positioning, navigation, and timing, said NGA Research Chief Scientist John Main. “We think the broader innovation community can help us support disaster response operations more effectively by exploring novel ways to understand where things are happening — or even better where things will be happening — during an emergency event. This is NGA Research’s goal and the reason we tap scientific and technical talent and ideas from national labs, universities, and businesses.”
“This is a hard computer vision problem that will benefit from the diverse approaches that a machine learning challenge can bring to bear,” said Greg Lipstein, co-founder and principal of DrivenData. “This is a great opportunity to bring together a fascinating dataset with a passionate community of experts to generate innovative solutions for disaster response and other time-sensitive needs”
“Our global network of problem-solvers is perfectly suited to support the advancement of state-of-the-art methods for using and understanding satellite imagery,” said Christian Cotichini, CEO, HeroX. “Having great minds come together for an initiative like this will help us more quickly and more effectively support people in times of need.”
Eligibility to Compete and Win Prizes
The challenge is open to anyone aged 18 or older not affiliated with DrivenData or the challenge sponsor and permitted to compete under the laws of the U.S. and their local jurisdictions.
Finalists will be determined by performance on a private test set of historical measurements, and bonus prizes will also be awarded for qualifying scores that reflect innovative approaches. All prize-winning approaches will be shared under an open-source license for learning and use by the community.
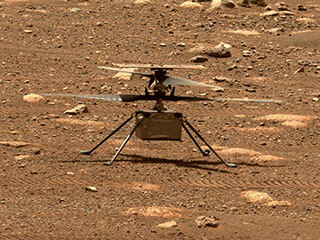
Only if you have been living under a rock will it be a surprise to hear that the unmanned helicopter called Ingenuity has arrived on Mars attached to the SUV-sized rover called Perseverance. Both have been on the Red Planet since they landed on Feb. 18.
NASA has since then been in checkout and test mode for both rover and UAV, but Perseverance got a pretty clean bill of health and was commanded to motor over to a flat piece of adjacent Jexero crater — now referred to as the airfield or heliport. There, Ingenuity was detached from the underbelly of Perseverance. Then the little bird lost its power feed from mama rover. Now it has to rely on its own batteries and a small solar panel. The big SUV rover pulled away to a safe 215-foot distance ,and the folks at NASA set about preparing Ingenuity for flight.
This article was written during the period when things were proceeding with some hesitancy and delay, so things in the article unfold in the same sequence as we all experienced them while we eagerly awaited Integrity’s maiden flight.
The Ingenuity waits to take its first flight. (Photo: NASA)
Countdown to Flight
At only 4 pounds (weighing 1.5 pounds on Mars), the Ingenuity UAV is small, but it’s packed with electronics that allow it to communicate via top-mounted antennas with the rover.
It carries a lithium ion battery recharged by a small solar panel mounted on top (350 watts is required for a 90-second flight). The UAV also contains heaters to maintain the avionics through the cold of the Martian night. It carries two cameras — a black-and-white navigation camera and a high-density color imager — plus sensors for image processing, data collection and storage, navigation processing and vehicle control.
One of the objectives for this first flight demonstration is the miniaturization and weight reduction of all these electronics. The NASA website is a little obscure about how the UAV navigates, but perhaps it uses some form of terrain matching/image processing in conjunction with an onboard inertial sensor and laser altimeter.
Early Shutdown. The UAV had already survived a few nights on its own at around -117F when NASA began to spool up the two four-foot long blades to around 50 rpm during the checkout, and all seemed well until April 9, when a full-speed 2400 rpm spin-test began, and there was an early shut-down due to a watchdog timer — intended to shut things down if something wrong was detected prior to flight. None of this was learned in real time, as radio signal commands take more than 15 minutes to travel the 173-million-miles from Earth to Mars, with the same delay to send back data from what has already happened.
The density of atmosphere on Mars is only 1% that of Earth, so getting Ingenuity off the ground is more complicated than on Earth. The four-foot-long composite carbon blades have much more surface area than here on Earth for a typical UAV. The two contra-rotating blades spin at around 2400 rpm — a drone on Earth would typically spin its rotors at around 450 rpm.
Testing on Earth. NASA tested this configuration in a huge vacuum chamber with 1% air density, and Ingenuity flew just fine. The lower gravity on Mars — about 38% that of on Earth — will also help compensate for the lower level of lift available from the Martian atmosphere.
Because of the radio link delay to and from Mars, Ingenuity can fly and land autonomously only once commands are received. Onboard sensors provide data to enable the vehicle to execute the stored flight profile. The navigation camera provides guidance, and the 13-megapixel color-imaging camera can record the scene. Data and video collected are sent back to the rover for transmission to Earth via the Mars Reconnaissance Orbiter, an Mars satellite that acts as a data relay.
Ingenuity left the rover and rested on the surface of Mars, while NASA ran a slew of preflight checks. (Photo: NASA)
The First Hop. The first‘ hop was planned to last only a few seconds, but subsequent flights promise to be 165-foot plus, at more than 16 feet above the surface. If things go well, NASA might get more adventurous for the planned fourth and fifth flights.
All these flights are supposed to happen during the first month of Ingenuity’s flight activity; then Perseverance has to move on with its real task — searching for signs of ancient life on Mars. With no communications possible without the rover, the current plan is to abandon the little bird, even though it may still be fully functional.
Working to Clear the Watchdog Timer. NASA worked to clear the watchdog-timer problem and give Ingenuity clearance to fly. Over the weekend of April 10–11, the Ingenuity team came up with a fix for flight software. which overcomes the watchdog-timer issue.
However, before the new software could be uploaded to the ground station on Earth and sent to the Perseverance rover for onward transmission to Ingenuity, extensive testing and validation of the software change was necessary. The existing flight software had not been changed for more than two years, so it’s understandable that NASA wanted to be sure before uplinking new software.
Past the April 14 Date. The initially predicted flight date of April 14 came and went, and we still awaited news of the outcome of the next rotor spin-up test. Lift-off and autonomous flight and landing were still to come.
Meanwhile, another team member came up with a fix to the sequencing of commands that would transition Ingenuity from ground to flight mode, the place in the sequence where things had previously hung up. The revised sequence was sent to Mars and on April 16. The subsequent spin test went off successfully with the contra-rotating blades turning at the anticipated flight speed of 2400 rpm. Apparently, the work on the new version of flight control software was still proceeding, but NASA had decided they have sufficient confidence to set a new flight date of April 19.
Monday April 19 — The Integrity photographs its shadow while airborne. (Photo: NASA)
Maiden Flight
Then, while we all slept, on April 19 at 3:30 a.m. Eastern Time, Integrity executed the command. It autonomously took off, hover edat a height of 10 feet for around 60 seconds, and then returned to its Martian airfield.
Above is a picture Integrity took of its own shadow while airborne. it was around noon on Mars in bright sunlight, hence the clear, well-defined shadow. Data received some time later via Perseverance and the Mars Reconnaissance Orbiter contained laser altimeter readings that confirmed this first flight. The color video from Perseverance also shows the spinning rotors and the UAV taking off, hovering at 10ft, descending and landing.
A small patch that Integrity carries is from the Wright Brothers’ flimsy, powered Wright Flyer, which flew for the very first time on Earth on Dec. 17, 1903. Now we have the very first powered flight on another planet. NASA has scheduled another four or five flights for Integrity, so we may soon even see moving panoramas of Mars from Integrity.
So now we can chalk up the first powered flight on another planet as another major human achievement — discounting, of course, that maybe some other species has done it eons ago. But, nah, we all know Mars is a dead planet, now.
The ION GNSS+ 2021 technical program is online, and registration for the event is now open. ION GNSS+ 2021 takes place Sept. 20-24 at the St. Louis Union Station Hotel in St. Louis, Missouri.
ION GNSS+ 2021: GNSS + Other Sensors in Today’s Marketplace, is the 34th International Technical Meeting of the Satellite Division of the Institute of Navigation, and the world’s largest technical meeting and showcase of GNSS and GNSS-related technology, products and services.
“It’s exciting to be meeting in-person in St. Louis,” said Lisa Beaty, ION executive director. “We are expecting a pent-up demand as the community is eager to convene and get caught up. The ION GNSS+ 2021 technical and commercial exhibit is the best opportunity of the year to see what’s been happening in PNT [positioning, navigation and timing].”
ION GNSS+ 2021 features more than 300 technical presentations under two technical tracks: Commercial and Policy, and Research. The opening Plenary Session will feature two keynote addresses: “Towards a Smart Digital Reality: Building a Sustainable Future,” presented by Burkhard Boeckem, and “Artemis: Return to the Moon” presented by Steven Clarke, NASA.
For those unable to attend in person, ION GNSS+ 2021 will include a virtual option. Registration offers access to all on-demand conference content, live streams of select sessions, proceedings, as well as recordings of the sessions that were live streamed during the conference. ION GNSS+ Virtual Registration includes virtual contact with ION GNSS+ exhibitors and CGSIC’s technical program.
To view the ION GNSS+ 2021 technical program and to register, go to ion.org/gnss.
Space communications and navigation engineers at NASA are evaluating the navigation needs for the Artemis program, including identifying the precision navigation capabilities needed to establish the first sustained presence on the lunar surface.
“Artemis engages us to apply creative navigation solutions, choosing the right combination of capabilities for each mission,” said Cheryl Gramling, associate chief for technology in the Mission Engineering and Systems Analysis Division at Goddard Space Flight Center in Greenbelt, Maryland. “NASA has a multitude of navigation tools at its disposal, and Goddard has a half-century of experience navigating space exploration missions in lunar orbit.”
Alongside proven navigation capabilities, NASA will use innovative navigation technologies during the upcoming Artemis missions.
“Lunar missions provide the opportunity to test and refine novel space navigation techniques,” said Ben Ashman, a navigation engineer at Goddard. “The Moon is a fascinating place to explore and can serve as a proving ground that expands our navigation toolkit for more distant destinations like Mars.”
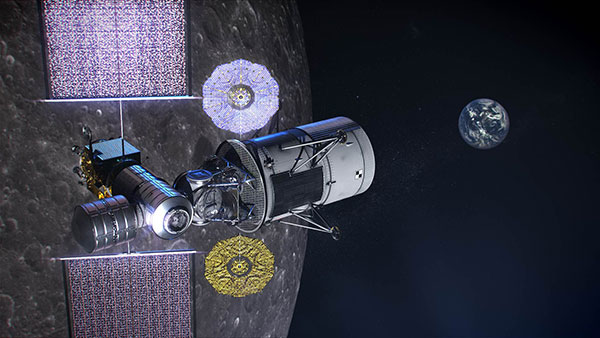
Illustration of NASA’s lunar-orbiting Gateway and a human landing system in orbit around the Moon. (Image: NASA)
Ultimately, exploration missions need a robust combination of capabilities to provide the availability, resiliency, and integrity required from an in-situ navigation system. Some of the navigation techniques being analyzed for Artemis include the following.
Radiometrics, optimetrics and laser altimetry
Radiometrics, optimetrics, and laser altimetry measure distances and velocity using the properties of electromagnetic transmissions. Engineers measure the time it takes for a transmission to reach a spacecraft and divide by the transmission’s rate of travel — the speed of light.
These accurate measurements have been the foundation of space navigation since the launch of the first satellite, giving an accurate and reliable measurement of the distance between the transmitter and spacecraft’s receiver. Simultaneously, the rate of change in the spacecraft’s velocity between the transmitter and spacecraft can be observed due to the Doppler effect.
Radiometrics and optimetrics measure the distances and velocity between a spacecraft and ground antennas or other spacecraft using their radio links and infrared optical communications links, respectively. In laser altimetry and space laser ranging, a spacecraft or ground telescope reflects lasers off the surface of a celestial body or a specially designated reflector to judge distances.
The Lunar Orbiter Laser Altimeter (LOLA) aboard the Lunar Reconnaissance Orbiter (LRO) sends laser pulses down to the surface of the Moon from the orbiting spacecraft. These pulses bounce off of the Moon and return to LRO, providing scientists with measurements of the distance from the spacecraft to the lunar surface. As LRO orbits the Moon, LOLA measures the shape of the lunar surface, which includes information about the Moon’s surface elevations and slopes. This image shows the slopes found near the South Pole of the Moon. (Image: NASA/LRO)
Optical navigation
Optical navigation techniques rely on images from cameras on a spacecraft. There are three main branches of optical navigation.
Star-based optical navigation uses bright celestial objects such as stars, moons, and planets for navigation. Instruments use these objects to determine a spacecrafts’ orientation and can define their distance from the objects using the angles between them.
As a spacecraft approaches a celestial body, the object begins to fill the field of view of the camera. Navigation engineers then derive a spacecraft’s distance from the body using its limb — the apparent edge of the body — and centroid, or geometric center.
At a spacecraft’s closest approach, Terrain Relative Navigation uses camera images and computer processing to identify known surface features and calculate a spacecraft’s course based on the location of those features in reference models or images.
NASA will use data gathered from LuGRE to refine operational lunar GNSS systems for future missions.
Weak-signal GPS and GNSS
NASA is developing capabilities that will allow missions at the Moon to leverage signals from GNSS constellations. These signals — already used on many Earth-orbiting spacecraft — will improve timing, enhance positioning accuracy, and assist autonomous navigation systems in cislunar and lunar space.
In 2023, the Lunar GNSS Receiver Experiment (LuGRE), developed in partnership with the Italian Space Agency, will demonstrate and refine this capability on the Moon’s Mare Crisium basin. LuGRE will fly on a Commercial Lunar Payload Services mission delivered by Firefly Aerospace of Cedar Park, Texas. NASA will use data gathered from LuGRE to refine operational lunar GNSS systems for future missions.
Illustration of Firefly Aerospace’s Blue Ghost lander on the lunar surface. The lander will carry a suite of 10 science investigations and technology demonstrations to the Moon in 2023 as part of NASA’s Commercial Lunar Payload Services (CLPS) initiative.
Autonomous navigation
Autonomous navigation software leverages measurements like radiometrics, celestial navigation, altimetry, terrain-relative navigation, and GNSS to perform navigation onboard without contact with operators or assets on Earth, enabling spacecraft to maneuver independently of terrestrial mission controllers. This level of autonomy enables responsiveness to the dynamic space environment.
Autonomous navigation can be particularly useful for deep space exploration, where the communications delay can hamper in-situ navigation. For example, missions at Mars must wait eight to 48 minutes for round trip communications with Earth depending on orbital dynamics. During critical maneuvers, spacecraft need the immediate decision-making that autonomous software can provide.
LunaNet navigation services
LunaNet is a unique communications and navigation architecture developed by NASA’s Space Communications and Navigation (SCaN) program. LunaNet’s common standards, protocols, and interface requirements will extend internetworking to the Moon, offering unprecedented flexibility and access to data.
For navigation, the LunaNet approach offers operational independence and increased precision by combining many of the methods above into a seamless architecture. LunaNet will provide missions with access to key measurements for precision navigation in lunar space.
Artist’s conceptualization of Artemis astronauts using LunaNet services on the Moon, a unique approach to lunar communications and navigation. The LunaNet communications and navigation architecture will enable the precision navigation required for crewed missions to the Moon and place our astronauts closer to scientifically significant lunar sites, enhancing the our missions’ scientific output. (Image: NASA/Resse Patillo)
NASA’s Space Communications and Navigation (SCaN) program is developing capabilities that will allow missions at high altitudes to take advantage of GNSS signals for timing and navigation, including the Artemis missions to the Moon.
Interoperability of the GNSS constellations will be key for spacecraft at higher altitudes where GNSS signals are less plentiful. The program will rely on the four global constellations (GPS, Galileo, GLONASS and BeiDou) and the two regional systems operated by India and Japan.
SCaN is supporting flight experiments that will help develop multi-GNSS capabilities for spacecraft, such as Bobcat-1, developed by NASA’s Glenn Research Center in Cleveland and Ohio University.
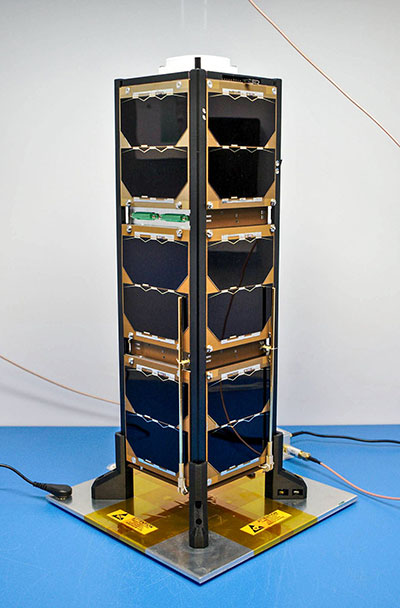
Bobcat on the Prowl
Bobcat-1, shown with its deployable antenna stowed, will experiment with the GNSS inter-constellation time offset from low-Earth orbit. (Photo: NASA)
Bobcat-1 was selected by the CubeSat Launch Initiative in 2018 to study GNSS signals from 250 miles overhead. The small satellite launched to the International Space Station aboard a Northrop Grumman Cygnus spacecraft on Oct. 2, 2020.
On Nov. 5, the space station released the CubeSat to begin its mission. The spacecraft will orbit for about nine months, measuring signals from different GNSS constellations. Engineers will use these measurements to better understand GNSS performance, specifically focusing on timekeeping variations between the constellations.
“GNSS users at high altitudes see fewer satellites,” said Bobcat Co-Principal Investigator Frank Van Grass of Ohio University. “Time offsets between the constellations can be measured by the CubeSat and provided to these users to improve their positioning performance,”
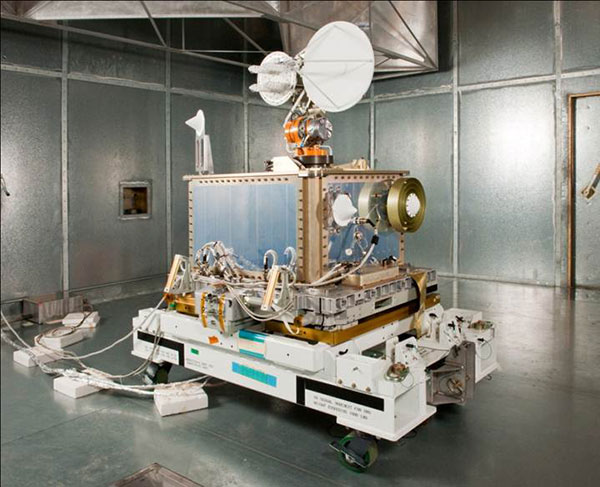
SCaN Testbed
Bobcat-1 builds on the legacy of the SCaN Testbed, which demonstrated multi-GNSS capabilities on the space station from 2012 to 2019. The GPS and Galileo Receiver for the International Space Station (GARISS) — an instrument developed in collaboration between NASA and ESA (European Space Agency) — received signals from both GPS and Galileo, the GNSS constellation operated by the European Union.
The SCaN Testbed prior to launch to the International Space Station. (Photo: NASA)
The SCaN TestBed also laid the foundation for the Lunar GNSS Receiver Experiment (LuGRE), a Commercial Lunar Payload Services payload being developed in partnership with the Italian Space Agency. The payload will receive signals from both GPS and Galileo and is expected to obtain the first-ever GNSS fix on the lunar surface.
GNSS PNT Policy and Advocacy
While NASA engineers develop the technologies necessary for multi-GNSS navigation at ever-higher altitudes, the SCaN team works with stakeholders in the U.S. government and internationally to advance GNSS interoperability in the policy sphere. They consult on the United Nations International Committee on GNSS, helping develop additional capabilities in the Space Service Volume and beyond.
NASA recently worked to publish GPS antenna patterns from GPS satellites that launched between 1997 and 2000, collaborating with the U.S. Space Force, the U.S. Coast Guard and Lockheed Martin, who built the satellites. The PNT team is also working to facilitate publication of antenna patterns for more recent GPS satellites.
With this data, mission planners can better assess the performance of GNSS in high-Earth orbit and lunar space. This forthrightness also encourages other GNSS providers to be similarly transparent.
The Goddard PNT policy team received a 2019 Agency Honor Award for their advocacy of NASA’s interests in GNSS. From let are Frank Bauer, Jenny Donaldson, J.J. Miller, Ben Ashman and Joel Parker. Not pictured, Lauren Schlenker. (Photo: NASA)
“GNSS capabilities continue to revolutionize the ways spacecraft navigate in near-Earth space and beyond,” said NASA navigation engineer Joel Parker. “NASA’s longstanding relationships with the GNSS providers have advanced these capabilities to new heights and support the Artemis missions on and around the Moon.”
We leave as we came, and, God willing, we shall return, with peace and hope for all mankind.” —Astronaut Gene Cernan’s closing words, the twelfth and last person on the moon as he stepped back into the Apollo XVII Lunar Module on December 13, 1972.
Photo: NASA
Apollo was about vision, courage and discovery. Apollo helped unravel the mysteries of the moon — a serene, desolate, and barren place, bleached by the sun, and covered in a pale, gray, abrasive dust made up of microscopic, razor sharp, glass-like shards called regolith that is 60 feet deep in places.
Beneath the regolith is the bedrock of the moon — the Lunafirma.
The next phase of exploration is building a permanent base station on the moon, aptly named Artemis, Apollo’s twin sister. It would be fitting when mankind returns that the next person who steps out onto the lunar surface were a woman.
Artemis Moon Log/Program Entry Date 42: Earth Day is Tuesday, November 4, 2025
The regolith mining operations are proceeding as expected. All operations are 100% solar power until additional mobile thorium reactor units arrive. The only existing thorium reactor unit is the Clavius Crater water extraction operation. Construction of the Selene-1 Moonbase has encountered a setback. No other issues are reported.
The regolith in the surrounding plain is 6 meters deep. The Miners have not experienced any issues. The electrostatic power suits are repelling the abrasive dust better than expected. The Miners have cleared a 50 m2 area down to the bedrock. From the Gateway observation deck, it appears as a small square crater. The Miners are working non-stop on rotating shifts clearing regolith, recharging, replacing parts, or in transit.
Analysis of the regolith reveals a uniform distribution of 21% silica, 13% aluminum, 10% calcium, 10% iron, 5% magnesium, and 2% sodium and titanium. Minor amounts of chromium, phosphorus, and potassium are present. Hydrogen is 0.0027%. The metals are all oxides containing 40% elemental oxygen, which is being separated during processing for later use.
West about 200 km, towards Mare Crisium, the gravitational anomalies increase but within the Selene-1 Moonbase crater the anomalies are negligible. Geospatial analysis of the drill cores show an extensive concentration of lithium beneath a 12-meter-thick layer of basalt east of Ginzel Crater. Towards the south are increased concentrations of titanium and tungsten. Ejection debris discovered during the regolith mining operation showed traces of neodymium. The estimated trajectory of the ejecta points to it coming from the Moiseev Crater complex. An expeditionary rover is in route to collect samples and will arrive in 6 hours. Readings from those samples will be in the next log report.
The Parabolic Solar Powered (PSP) laser torches in the open crater basin are performing as expected. The Constructors are 3D fusing the regolith into silicate glass forms and transporting them to staging areas for later construction. The higher-than-normal content of iron in the regolith is giving the glass forms a reddish hue.
At the south pole, the water extraction operation at Clavius Crater has been operating uninterrupted for 816 hours. The thorium reactor is powering the entire operation. The smelter is distilling volatiles out of the regolith at the rate of 1m3 every 8 hours extracting a liter of water every 24 hours. The operation is on schedule for the two 100-liter tanks of water for delivery to the Selene-1 Moonbase by the due date.
There are five 4G cellular towers around the perimeter of the Selene-1 Moonbase and regolith mining area at 3 km intervals. The cellular array is providing accuracies of 1 millimeter allowing for precision mining, drilling, construction, and transportation. As the operation expands, more towers will be added. Two more towers are stationed at Clavius Crater. The 360° cameras and radar provide continuous surveillance and monitoring.
Testing of the 3D vision and synthetic neural response systems of the robots is complete and all of them are operational. The real-time connectivity with the robots allows controllers onboard the Gateway to remote link into any of the robots using virtual headsets and haptic body suits for full-immersion control. AI is constantly scanning for anything unusual and alerts the controllers to remote in; otherwise, the robots operate continuously and efficiently. The Miners are clearing nearly 5m3 of regolith every 24 hours during light conditions.
Phase I is underway. Miners are leveling off the exposed bedrock to begin construction of the landing pad. Once finished, the Constructors will use the PSP laser torches to begin fusing together the silicate glass blocks to make the landing pad. Afterwards, The Miners will begin Phase II and lay the foundation for the railgun to propel the filled mineral containers back to Earth. Both Phase I and Phase II are on schedule.
The setback encountered during construction of the Selene-1 main base station is due to excessive heat build-up. The Excavators are clearing the floors and shaping the walls within the lava tube. However, the heat from the laser torches is building-up and shutting down the machines prematurely. When the ambient temperatures exceed 160°C the machines shutdown to protect their electrostatic coatings. Having no atmosphere and no wind the heat is not dissipating. The fluid in the heat exchangers is overheating. Until directed otherwise, the Excavators are doing 90-minute shifts and the Torches for 35 minutes. The Torches have to fuse together the support beams and the silicate glass protective layering behind the Excavators to preserve structural integrity. A software update set the laser torches to pulse fire extending the heat build-up for an additional 5 minutes. Only 15 meters have been cleared but the inflatable habitats require at least another 85 meters into the lava tube. The setback pushes back the date for completing the base station by approximately 620 hours. A temporary external module can house the astronauts for their return on April 19, 2026 until Selene-1 is completed.
The above fictional account of a Moon Log entry for the Artemis program is based on NASA’s mid-October announcement selecting Nokia to build a 4G network on the moon.
An in-depth look at the announcement holds interest for the GIS community.
The Artemis program will be heavily dependent on spatial technologies and require a Lunar Spatial Reference System. However, the Moon has significant challenges. There is no constellation of satellites orbiting the Moon to provide precise location data like GPS satellites do on Earth, and it is not possible to develop such a satellite system around the moon because the moon’s gravitational center is lopsided and weighted towards Earth due to tidal lock. This causes orbital decay of lunar satellites until they eventually crash into the lunar surface.
However, there are four orbital inclinations that allow for indefinite low orbits and may provide for a future Lunar Positioning System (LPS). Such a system would be extremely costly, so a less expensive and more immediate LPS will be a ground-based cellular network array; and 4G is preferred over 5G because it offers longer ranges, which is why NASA selected Nokia. NASA is working on other solutions through the Space Communications and Navigation (SCaN) program.
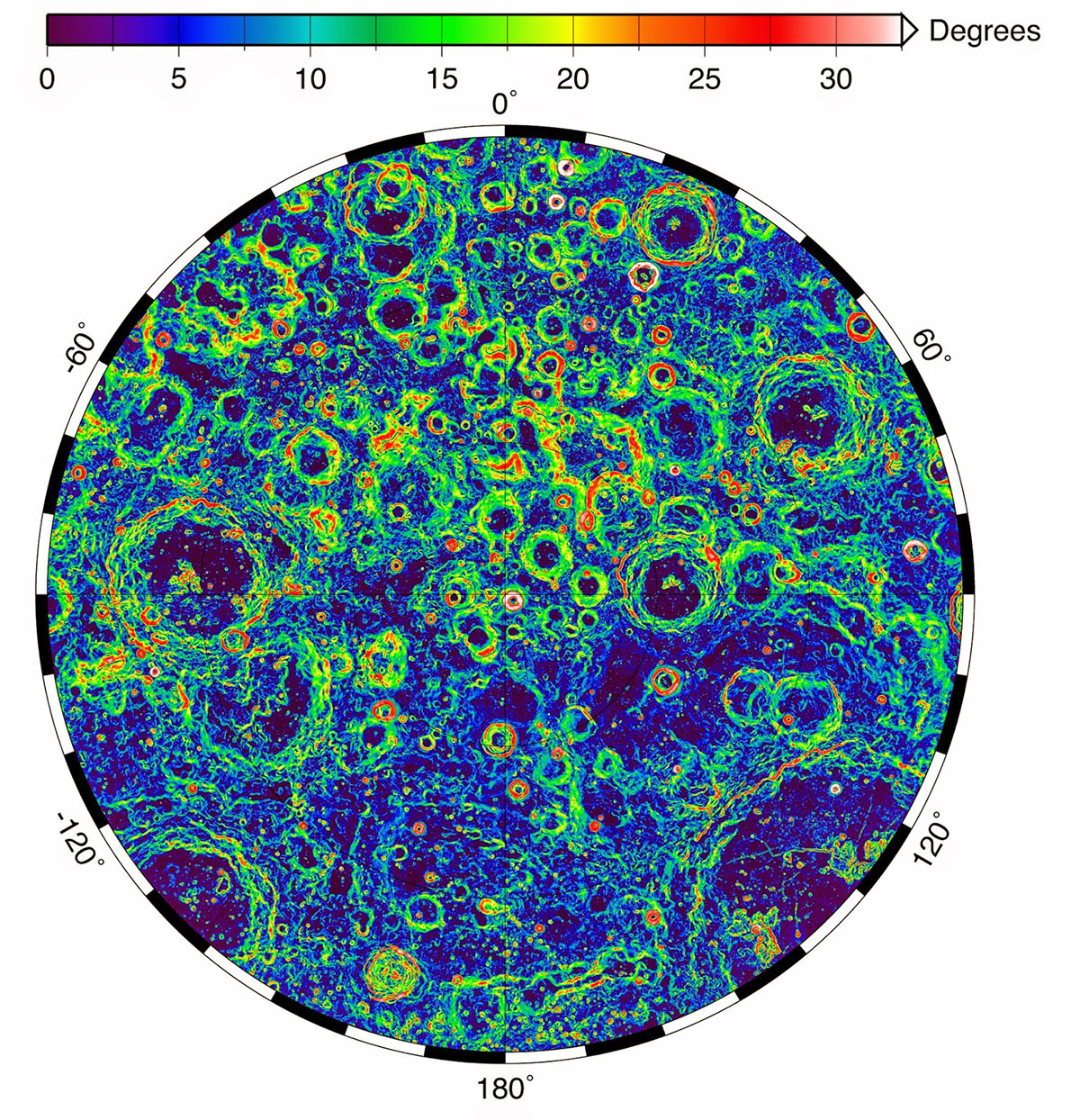
Figure 2: Unified Geologic Map of the Moon. Orthographic projections of the “Unified Geologic Map of the Moon” showing the geology of the Moon’s near side (left) and far side (right) with shaded topography from the Lunar Orbiter Laser Altimeter. It will serve as a reference for lunar science and future human missions to the moon. Gravitational mass concentrations are also depicted in the image showing the majority being on the nearside while the farside is void of gravitational concentrations. Check out a video of rotating sphere. (Image: NASA/GSFC/USGS)
In a blow to science fiction novels, it will not be humans out on the barren, dust covered lunar landscape, or in the cold depths of crater shadows with pickaxes and jackhammers. It will be robots working prolonged periods in extreme temperatures running on solar power or nuclear power while constantly bombarded by cosmic rays and direct solar radiation.
Accomplishing this will require real-time communication with spatially enabled, artificially intelligent machines able to support fully immersive experiences with 3D vision headsets and haptic feedback systems so controllers at the base station wearing special suits can remote into any robot.
Due to a 2.5-second transmission delay between the Earth and the Moon, Ground Control will be limited to observation and analysis. Autonomous rockets will ferry cargo and supplies between more distant locations on the moon and ferry astronauts back and forth to the Gateway space station.
The ground-based 4G cellular towers will be mobile units with retractable towers about 25 meters high with a circular array of solar panels that will unfurl about 10 meters up from the base of the mast to protect them from the abrasive regolith dust.
Beneath the panels rovers and robots will plug in and charge their batteries as they journey to and from the base station. The towers will have 360° cameras and sensors and will provide data links and a localized spatial reference system.
However, objects in flight, such as autonomous rockets, will require other means to navigate across the moon and between the space-based cargo ships and the base station.
One solution is visual-inertial odometry (VIO). It uses one or more cameras and at least one inertial measuring device. Those components are already standard on almost every smartphone. Position accuracy using VIO is derived by feature recognition — the most prominent features on the moon are craters.
In support of this initiative, the National Geospatial Intelligence Agency (NGA) is sponsoring a software developer’s challenge to create algorithms for identifying circular patterns in imagery. It’s harder than you think. Learn more here.
Figure 3. (Photo: NASA/GSFC/Arizona State University)
The base station will be inside a lava tube beneath the moon’s surface to protect astronauts and equipment from solar radiation and micrometeor impacts. Most of the resources for the moon base will be extracted and processed in-situ, which requires spatial analysis of drill core samples to pinpoint where to mine for minerals in the subsurface layers and where to locate scarce resources such as water. The lava tubes on the moon are also valuable for mining operations but navigating an underground environment with autonomous machines poses challenges of its own, some of which are spatial awareness. The Defense Advanced Research Projects Agency (DARPA) recently held a developer’s challenge to address navigating in subterranean domains.
“Reaching the Moon by three-man vessels in one long bound from Earth is like casting a thin thread across space. The main effort, in the coming decades, will be to strengthen this thread; to make it a cord, a cable, and, finally, a broad highway.” —Isaac Asimov
William Tewelow works for the Federal Aviation Administration. He is a graduate of the FAA management fellowship program. He served on special assignment to the U.S. Department of Transportation leading a national strategic geospatial iniative for the White House Open Data Partnership. He is a Geographic Information Systems Professional and a speaker for the Maryland STEMnet Scholar program. He was among the first in the nation to earn a Geospatial Specialist Certification from the U.S. Department of Labor while working at NASA Stennis Space Center. He has degrees in Geographic Information Technology, Intelligence Studies and is completing a masters degree in Organizational Management. William is a 23-year veteran for the U.S. Navy serving as a geospatial specialist, imagery intelligence specialist, a naval aviator, a meteorologist and a tactical oceanographer. He is married, enjoys writing and traveling. His favorite quote is, “A man’s mind changed by a new idea can never go back to its original dimension.” —Oliver Wendell Holmes
By Danny Baird NASA’s Space Communications and Navigation program office
The Artemis generation of lunar explorers will establish a sustained human presence on the Moon, prospecting for resources, making revolutionary discoveries and proving technologies key to future deep space exploration.
To support these ambitions, NASA navigation engineers from the Space Communications and Navigation (SCaN) program are developing a navigation architecture that will provide accurate and robust position, navigation and timing (PNT) services for the Artemis missions. GNSS signals will be one component of that architecture. GNSS use in high-Earth orbit and in lunar space will improve timing, enable precise and responsive maneuvers, reduce costs, and even allow for autonomous, onboard orbit and trajectory determination.
On Earth, GNSS signals enable navigation and provide precise timing in critical applications like banking, financial transactions, power grids, cellular networks, telecommunications and more. In space, spacecraft can use these signals to determine their location, velocity and time, which is critical to mission operations.
“We’re expanding the ways we use GNSS signals in space,” said SCaN Deputy Director for Policy and Strategic Communications J.J. Miller, who coordinates PNT activities across the agency. “This will empower NASA as the agency plans human exploration of the Moon as part of the Artemis program.”
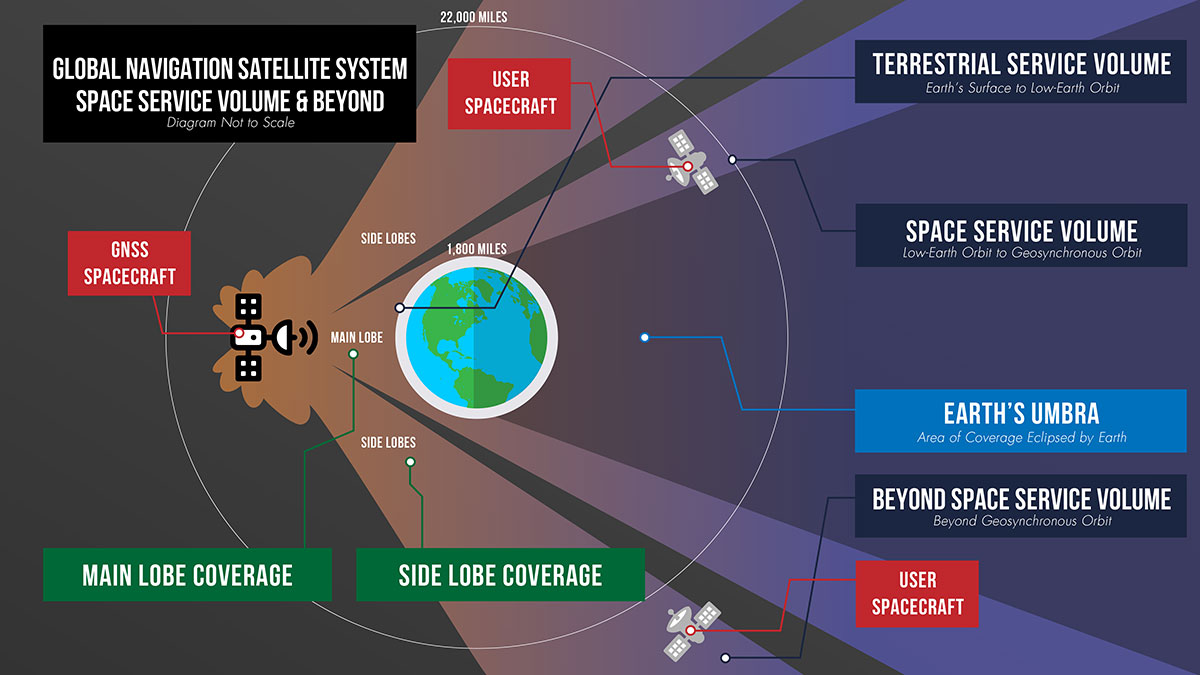
Spacecraft near Earth have long relied on GNSS signals for PNT data. Spacecraft in low-Earth orbit below about 1,800 miles (3,000 km) in altitude can calculate their location using GNSS signals just as users on the ground might use their phones to navigate.
This provides enormous benefits to these missions, allowing many satellites the autonomy to react and respond to unforeseen events in real time, ensuring the safety of the mission. GNSS receivers can also negate the need for an expensive onboard clock and simplifies ground operations, both of which can save missions money. Additionally, GNSS accuracy can help missions take precise measurements from space.
Expanding the Space Service Volume
This photograph of a nearly full Moon was taken from the Apollo 8 spacecraft at a point above 70 degrees east longitude. Mare Crisium, the circular, dark-colored area near the center, is near the eastern edge of the Moon as viewed from Earth. (Image: NASA)
Beyond 1,800 miles in altitude, navigation with GNSS becomes more challenging. This expanse of space is called the Space Service Volume, which extends from 1,800 miles up to about 22,000 miles (36,000 km), or geosynchronous orbit. At altitudes beyond the GNSS constellations themselves users must begin to rely on signals received from the opposite side of the Earth.
From the opposite side of the globe, Earth blocks much of the GNSS signals, so spacecraft in the Space Service Volume must instead “listen” for signals that extend out over the Earth. These signals extend out at an angle from GNSS antennas.
Formally, GNSS reception in the Space Service Volume relies on signals received within about 26 degrees from the antennas’ strongest signal. However, NASA has had marked success using weaker GNSS side lobe signals — which extend out at an even greater angle from the antennas — for navigation in and beyond the Space Service Volume.
Since the 1990s, NASA engineers have worked to understand the capabilities of these side lobes. In preparation for launch of the first Geostationary Operational Environmental Satellite-R weather satellite in 2016, NASA endeavored to better document side lobes’ strength and nature to determine if the satellite could meet its PNT requirements.
“Through early on-orbit measurement and documentation of the GNSS side lobe capabilities, future missions could rest assured that their PNT needs would be met,” said Frank Bauer, who began the GNSS PNT effort at NASA’s Goddard Space Flight Center in Greenbelt, Maryland. “Our understanding of these signal patterns revealed a host of potential new GNSS applications.”
Navigation experts at Goddard reverse-engineered the characteristics of the antennas on GPS satellites by observing the signals from space. By studying the signals satellites received from GPS side lobes, engineers pieced together their structure and strength. Using this data, they developed detailed models of the radiation patterns of GPS satellites in an effort called the GPS Antenna Characterization Experiment.
While documenting these characteristics, NASA explored the feasibility of using side lobe signals for navigation well outside what had been considered the Space Service Volume and in lunar space. In recent years, the Magnetospheric Multiscale Mission (MMS) has even successfully determined its position using GPS signals at distances nearly halfway to the Moon.
A graphic detailing the different areas of GNSS coverage. (Image: NASA)
GNSS at the Moon
To build on the success of MMS, NASA navigation engineers have been simulating GNSS signal availability near the Moon. Their research indicates that these GNSS signals can play a critical role in NASA’s ambitious lunar exploration initiatives, providing unprecedented accuracy and precision.
“Our simulations show that GPS can be extended to lunar distances by simply augmenting existing high-altitude GPS navigation systems with higher-gain antennas on user spacecraft,” said NASA navigation engineer Ben Ashman. “GPS and GNSS could play an important role in the upcoming Artemis missions from launch through lunar surface operations.”
While MMS relied solely on GPS, NASA is working toward an interoperable approach that would allow lunar missions to take advantage of multiple constellations at once. Spacecraft near Earth receive enough signals from a single PNT constellation to calculate their location. However, at lunar distances GNSS signals are less numerous. Simulations show that using signals from multiple constellations would improve missions’ ability to calculate their location consistently.
To prove and test this capability at the Moon, NASA is planning the Lunar GNSS Receiver Experiment (LuGRE), developed in partnership with the Italian Space Agency. LuGRE will fly on one of NASA’s Commercial Lunar Payload Services missions. These missions rely on U.S. companies to deliver lunar payloads that advance science and exploration technologies.
NASA plans to land LuGRE on the Moon’s Mare Crisium basin in 2023. There, LuGRE is expected to obtain the first GNSS fix on the lunar surface. LuGRE will receive signals from both GPS and Galileo, the GNSS operated by the European Union. The data gathered will be used to develop operational lunar GNSS systems for future missions to the Moon.