The PureL5 Customer Evaluation System is being tested by California and Chinese companies
OneNav has announced the commercial availability of its pureL5 GNSS digital IP core.
The pureL5 digital IP core’s architecture enables it to directly acquire and track L5 signals from GPS, Galileo, BeiDou, QZSS and GLONASS without any L1 aiding. This eliminates the entire L1 RF chain, saves space on the printed circuit board, and simplifies the RF front-end and antenna subsystem in smartphones, wearables and trackers.
The pureL5 digital IP core’s massively parallel array processor searches the entire 1-millisecond L5 code space in parallel, delivering 1 second time to first fix (TTFF). The pureL5 digital IP core is 0.28mm2 in the 3-nm semiconductor process and consumes 4.7 mW of power in 1-Hz tracking mode.
OneNav has delivered the pureL5 digital IP core register-transfer level (RTL) to its first system-on-chip (SOC) customer. IP core RTL verification and physical implementation are complete, and oneNav’s SOC licensee will tape out in the first quarter of this year. The pureL5 digital IP core RTL is available for customer licensing and shipment now.
Customer Evaluation System. OneNav’s pureL5 Customer Evaluation System is being tested by companies in California and China. The system is available for smartphone and wearable OEMs and SOC providers who want to evaluate oneNav’s pureL5 in the field and the lab.
PureL5 GNSS Features
Smaller footprint than L1+L5 hybrids, simplifying implementation in highly space-constrained devices such as 5G smartphones and wearables
Lowers bills of material (BOM) cost and simplifies the RF front-end and antenna subsystem by eliminating the entire L1 RF chain
No L1 aiding required: directly acquires L5/E5/B2 with 1-second TTFF
Less software complexity, simplifies RF coexistence engineering
Better interference resiliency
Scalable IP signal processing core is semiconductor process-node independent
The open-source release of FGI-GSRx software receiver widens its user base and offers researchers, students and developers a chance to utilize the research platform for innovations.
The GSRx software receiver, developed by the Finnish Geospatial Research Institute (FGI), is now being released as open source for use by the GNSS community.
FGI-GSRx has been extensively used as a research platform for the last decade in different national and international research projects to develop, test and validate novel receiver processing algorithms for robust, resilient and precise positioning, navigation and timing (PNT).
FGI-GSRx has been used to develop algorithms for detecting GNSS jamming and spoofing events in several past R&D projects. It is also used to develop mitigation algorithms to offer a resilient PNT solution to the user.
The FGI-GSRx software receiver will be discussed in the next edition of the textbook GNSS Software Receivers by Borre, Fernández-Hernández, Lopez-Salcedo and Bhuiyan. The book will be published by Cambridge University Press in August.
Uses of the software receiver
The software receiver can be used in universities and other research institutes to provide graduate-level students and early-stage researchers with hands-on training in GNSS receiver development. It can also be used in the GNSS industry as a benchmark software-defined receiver implementation.
The software receiver is already being used in the “GNSS Technologies” course offered widely in Finland at the University of Vaasa, Tampere University, Aalto University and the Finnish Institute of Technology.
The open-source release of FGI-GSRx will enable any third-party developer, researcher or student to use the platform to develop, test and validate innovative algorithms. It offers a flexible interface and configuration files, so that researchers can further implement their own codes or algorithms at different receiver processing stages. This allows the user to go much deeper into the coding without addressing all the implementation details, explained Research Professor Zahidul Bhuiyan, FGI, National Land Survey of Finland.
Meeting evolving industry needs
The GNSS market has faced a transformation in the past two decades, with new features and signal properties being added to the modernized satellite navigation systems at an increasing pace. A software-defined receiver enables algorithm optimization and testing in this rapidly changing industry.
The multi-constellation FGI-GSRx receiver has evolved to provide diversity and improved accuracy. When the FGI-GSRx was first developed, it was able to track the Galileo test satellites GIOVE A and GIOVE B. Since then, FGI researchers have been continuously developing new capabilities to the software receiver with the inclusion of Galileo in 2013, the Chinese satellite navigation system BeiDou in early 2014, the Indian regional satellite navigation System NavIC in late 2014, and the Russian satellite navigation system GLONASS in 2015.
A U.S. Secretary of Defense once predicted that navigation would eventually be based on inertial devices that were set at the factory, and then always knew where they were forever after. Recently published research has reported on steps in that direction. However, according to navigation expert Brad Parkinson, the outlook is not as bright as some might think.
RNT Foundation President Dana A. Goward recently discussed the issue with him.
Goward: Dr. Parkinson, you are well known for your contributions as the chief architect of the Global Positioning System. But you have more than a passing familiarity with inertial systems also, is that right?
Parkinson: I do. Long before I was involved in radio navigation, I was the chief analyst for all the U.S. Air Force testing of inertial navigation systems. I earned my masters degree in Doc Draper’s Inertial Lab at MIT in 1961. I am a major advocate and defender of inertial systems. I also have in-depth understanding of their limitations.
Goward: Have you been following the recent media coverage about advances with inertial systems?
Parkinson: I enjoy reading about these advances in physics devices. At the same time, I am a little impatient with media articles that do not appreciate the differences between building a device that measures specific force (or senses rotation) and a working inertial navigation system.
Goward: What are some of the inherent limitations of these systems?
Parkinson: I find it interesting that some of the articles speculate they may be able to supplant GPS and other GNSS. There is no way an inertial navigation system, even with perfect gyros and force sensors, can provide its accurate position (say, better than 10 meters) after extended periods (hours to days). In fact, attaining better than 200 meters accuracy after a few hours will be very difficult in a moving vehicle.
Today, farmers require even greater accuracy from GPS. They routinely use GPS for row operations, with accuracies of a few centimeters. The economic value is indirectly measured by the farmer’s purchase of such equipment — the agriculture market for GPS equipment is well over a billion dollars a year. Thus, a general replacement for GPS must provide centimeter accuracies.
Goward: So, what is it about inertial systems that stands in the way of them becoming autonomous substitutes for GPS?
Parkinson: There are some very simple and fundamental reasons that inertial positioning systems cannot hope to deliver such capability.
First, force sensors are not accelerometers, because they cannot sense gravity. To find acceleration, one needs to add vector gravity to their outputs. But gravity, or g force, varies a lot at the micro-g levels, and the inaccuracies are fed to the double integration that produces position. Errors grow as time or time squared and, without outside reset, are essentially unbounded. The physics devices described in some of these articles are definitely instruments that Doc Draper described as “specific force sensors.”
What we loosely call g force, or just g, is actually the inverse of the reaction to maintain stationarity on Earth. G is defined to include the centrifugal force due to Earth’s rotation, which varies greatly as a function of latitude — the radius of the merry-go-round called Earth. Mountains and chasms affect the local g. Further, it is a vector quantity: its direction can change locally by many arc seconds. In other words, down does not generally point to Earth’s center. Gravity gradiometers might be of limited help, but they are very large and not made for dynamic environments.
In a nutshell, estimating acceleration requires calculating and adding gravity to the three-dimensional specific force sensor.
Second, to use these devices for extended navigation, coordinate frames would have to be defined and stable to milli-arc seconds. All instruments would have to have input axes and cross-axis sensitivity calibrated to corresponding levels. Generally, this problem is ignored in many lab projects.
Third, for inertial navigation sensors to work, they need to accurately know their initial position. Any initial velocity or position errors will grow as a function of time.
Fourth, the vertical position axis is inherently unstable and diverges exponentially.
Physicists have been enamored with instruments that can use atoms to sense specific force and rotation. While scientifically interesting, even if perfect they cannot overcome these challenges.
Goward: But there is still a role for inertial systems in navigation, isn’t there? How good are they, and what are some of the applications?
Parkinson: I suspect the best inertial systems of today (which are in nuclear submarines) can maintain an accuracy of about 0.1 nautical miles or about 200 meters for a few days. I am sure the real number is classified. These systems are very large, expensive and complicated. They rely on a very low acceleration environment and are periodically reset with GPS. Furthermore, they probably use gravity gradiometry to calculate the local variations in gravity to the first order. They do not calculate the vertical position, and use water density and knowledge of the local geoid to keep the vertical axis stable.
An aircraft with inertial can, to some extent, keep the vertical dimension errors bounded, provided it has knowledge from elsewhere of local sea-level barometer settings and by assuming adiabatic pressure variations.
I strongly support the inertial/GPS/directional antenna marriage for users who want assured PNT. Aviation is a good use case for this. Inexpensive inertial components (called micro-electromechanical systems, or MEMS) can improve the jamming resistance of the GPS receiver by 15 dB or more. This step alone can reduce the effective line-of-sight jammer denial area by more than 95%.
Goward: So, inertials can be a good part of the solution but are not necessarily the whole solution themselves.
Parkinson: Exactly. Despite what some media outlets might publish to lure in readers.
At the ION GNSS+ 2021 conference in St. Louis, Missouri, the annual meeting of the Satellite Division of the Institute of Navigation, Brad Parkinson bestowed Lakshay Narula with the division’s Bradford W. Parkinson Award for his Ph.D. thesis “Towards Secure & Robust PNT for Automated Systems” at the University of Texas at Austin. The award honors Parkinson, known as the “father of GPS,” for his leadership in establishing both GPS and the Satellite Division of the ION. Narula is now an applied scientist at Amazon Lab126 in Sunnyvale, California, where he researches robust navigation and state estimation methods for robots, from self-driving cars to aerospace applications. (Photo: ION)
A roundup of recent products in the GNSS and inertial positioning industry from the February 2022 issue of GPS World magazine.
OEM
GNSS Receiver
For tracking, telematics
Photo: u-blox
The LENA-R8 GNSS receiver is based on the u-blox M10 platform. The compact module balances cost and performance with a single antenna and primarily targets customer deployments in the Europe, Middle East, Africa, Asia, and South America regions. Designed for tracking and telematics, the module series was designed to minimize material costs and data charges. The LENA-R8 supports a broad range of frequency bands with 2G fallback, providing maximum roaming coverage for global tracking applications using a single stock keeping unit (SKU).
The low-profile triple-band HC997EXF embedded helical GNSS antenna features eXtended Filtering (XF). It is designed for precise positioning, covering the GPS/QZSS-L1/L2/L5, GLONASS-G1/G2/G3, Galileo-E1/E5a/E5b, BeiDou-B1/B2/B2a, and NavIC-L5 frequency bands. It also covers regional satellite-based augmentation systems (WAAS, EGNOS, MSAS, GAGAN) and L-band correction services. It is packaged in a light (11 g), compact form factor (60 x 25 mm). Its precision-tuned, high-accuracy helical element provides an excellent axial ratio and operates without a ground plane, making it suitable for lightweight unmanned aerial vehicle (UAV) navigation and a wide variety of precision applications.
The SX-124 ruggedized 3U OpenVPX high-performance positioning, navigation and timing (PNT) card can provide timing and positioning information in a GPS-denied environment through sensor fusion. It is designed for highly integrated systems with a requirement for the U.S. Army’s C5ISR Modular Open Suite of Standards (CMOSS) and alignment with the Open Group Sensor Open Systems Architecture (SOSA) technical standard. The SX-124 can accept external sources or use its onboard GNSS receivers as reference inputs for timing and positioning data. The positioning data can be fused with internal and external inertial measurement units.
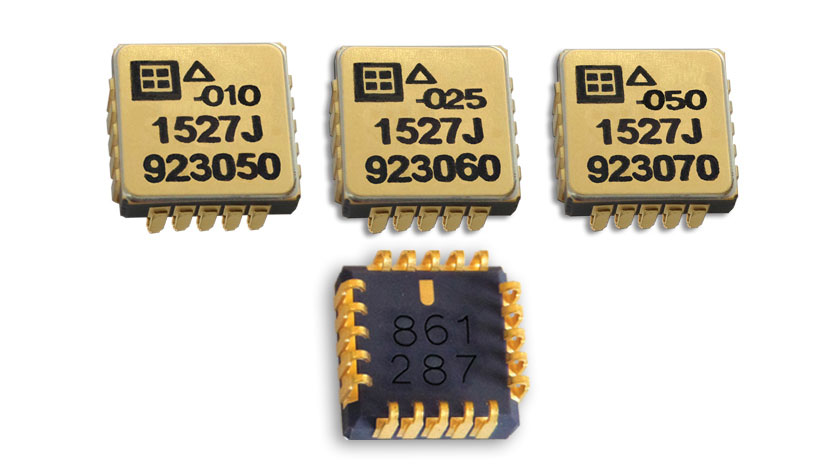
The Model 1527 series is a family of miniature, radiation-tested, tactical-grade micro-electromechanical (MEMS) accelerometers. Offered in three full-scale acceleration ranges — ±10 g, ±25 g and ±50 g — the series is designed to support a variety of critical space electronics testing requirements, including those of spacecraft, satellites and CubeSats. Their small bias and scale-factor temperature coefficients, excellent in-run bias stability and zero cross-coupling make the Model 1527 series particularly well-suited for spacecraft electronics testing applications requiring low power consumption (+5 VDC, 6.5 mA), low noise, long-term measurement stability in –55° C to +125° C environments, and performance reliability under intermittent radiation exposures.
The STA8135GA automotive-qualified GNSS receiver is designed to deliver the high-quality position data needed by advanced driving systems. Part of the Teseo V family, the STA8135GA integrates a triple-band positioning measurement engine. It also provides standard multi-band position-velocity-time (PVT) and dead reckoning. The multi-constellation receiver delivers raw information for the host system to run any precise-positioning algorithm, such as PPP/RTK (precise point positioning/real-time kinematic). The receiver can track satellites in the GPS, GLONASS, BeiDou, Galileo, QZSS and NAVIC/IRNSS constellations.
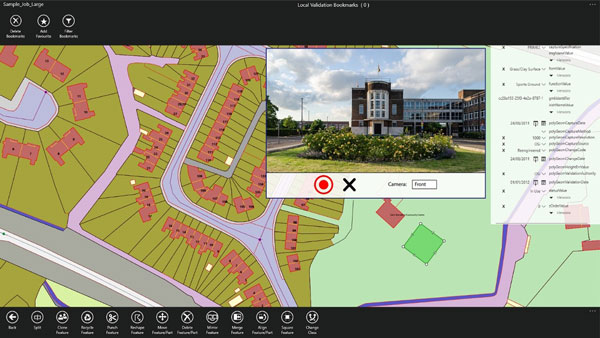
Survey application 1Edit now has increased support for photos and 2.5D data. 1Edit 3.1 allows users to attach feature photos, including automated geotagging, which enables surveyors to visualize assets and fine tune observations. Also included are new validation functions and improved handling for heights (2.5D data), typically useful for detailed asset and land-management surveys. Enhanced styling, including bitmap fills and dashed lines, make it easier to identify and classify different asset types during surveys. Additional control of editable layers and fields provides protection for non-editable data and protects the data quality. Significant improvements to rendering of thematic mapping enhances the speed and fluidity of the intuitive user interface.
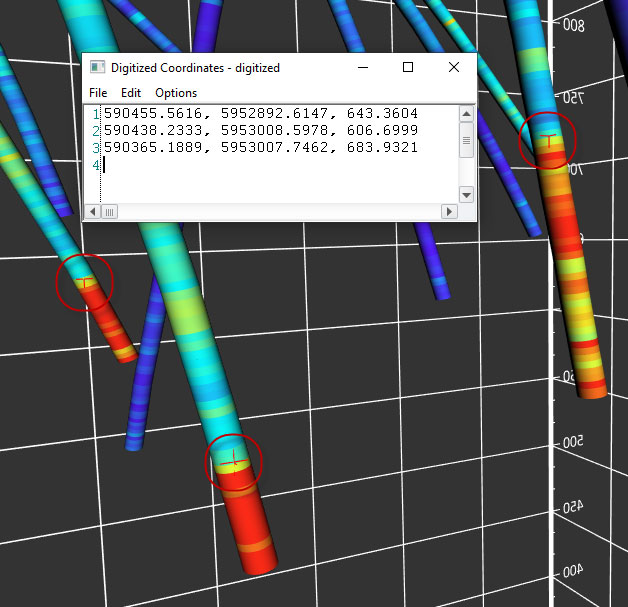
The latest version of Surfer surface mapping software has improved map-making functionality and data exporting capabilities. Surfer is used by more than 100,000 people worldwide, many involved in oil and gas exploration, environmental consulting, mining, engineering and geospatial projects. It provides fast and powerful contouring algorithms, enabling users to model data sets, apply an array of advanced analytics tools, and graphically communicate the results. Frames now have outlines and background fill colors to make them easier to read when placed on top of maps and attribute data can now be exported as numeric data.
The Multi-Sensor (MS-) RTK/PPP device is a turnkey system easily integrated into surveying applications. The module includes up to three multi-frequency, multi-GNSS (GPS + Galileo + Glonass + BeiDou) receivers, a MEMS IMU, a barometer, a CAN interface for reception of vehicle data (wheel odometry and steering angle), and an LTE module for reception of RTK/PPP corrections. ANavS sensor fusion performs tight coupling of all sensor data with an Extended Kalman Filter (EKF). Various interfaces can connect additional sensors (such as camera or lidar) or output position information.
The HD-MapBox integrates high-precision map data based on high-precision positioning. Fusing data from a GNSS receiver, IMU, ADAS camera, vehicle dynamics and HD maps, the HD-MapBox can achieve a lateral error of less than 8 inches (0.2 meters) and a longitudinal error of less than 6.5 feet (2 meters) with a 95% confidence interval, providing an accurate reference for highway pilots and automated valet parking. Even if both GNSS and lane line detection are not available, the HD-MapBox can still enable vehicles to keep inside the lane for at least a quarter mile (400 meters).
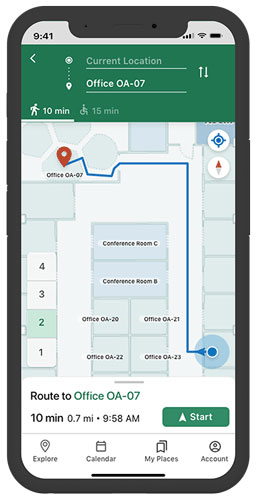
Esri ArcGIS IPS is an indoor positioning system that adds a blue dot to indoor maps, enabling users to locate their current position inside a building in the same way GPS enables outdoor location indicators. It uses an alternative technology to enable real-time positioning and navigation inside buildings. It also provides live location sharing and tracking, location data capture and analytical insights. ArcGIS IPS is available for users of ArcGIS Indoors, an indoor mapping system for smart building management, and ArcGIS Runtime SDKs, which enable the indoor positioning capability in custom-built apps.
Registration has now opened for the Applanix User Group Meeting and Conference, focused on Air and Land solutions, taking place in Fremont, California, Sept. 20-22. Discounted early bird prices will be available until May 22. The conference is also currently accepting speaker proposals.
This meeting will give you the opportunity to hear the latest news from Applanix, take in-depth product training, meet with product and customer support experts, and network with other industry leaders from around the world.
The conference will take place over three days and will have four main goals:
• Deliver an information-filled training experience on all of our software, as well as the APX series of boards, POS products, and the latest developments in the Autonomy field
• Present the new Land Mobile Mapping line of OEM and plug-and-play products
• Give customers and partners an opportunity to share their most recent projects and experiences
• Provide networking opportunities
To register and purchase tickets for the conference or to submit a proposal, visit Applanix’s website.
Hemisphere GNSS has added to its lineup another Vega heading and positioning OEM board that uses Lyra II and Aquila chipset technology — the Vega 34. The Vega 60 board was previously announced as using the Lyra II and Aquila chipsets.
Hemisphere’s Lyra II and Aquila application-specific integrated circuit (ASIC) designs simultaneously track and process more than 1,100 channels from all GNSS constellations and signals including GPS, GLONASS, Galileo, BeiDou, QZSS, NavIC, SBAS and L-band.
Integrators who use predecessor Hemisphere 34-pin products, such as Crescent Vector H220 and Phantom 34 OEM boards, can easily transition to the improved positioning performance and the superior satellite tracking abilities of the Vega series, the company said.
The Vega 34 board connectors have no circuitry changes and are identical for all Vector users, enabling them to add Atlas H10 and H30 precise point positioning (PPP) into their solutions.
“Vega 34 gives our integrators an easy path forward to enrich their own product offerings,” said Miles Ware, director of marketing at Hemisphere. “For the first time, Crescent Vector integrators can upgrade to multi-frequency without changing pinouts. They can also take advantage of other standard features like more than 1,100 tracking channels, Cygnus interference mitigation technology and spectral analysis.”
NavIC Upgrade. The introduction of the Vega 34 board also brings a new firmware release. Version 6.05 extends several features and improvements and introduces NavIC (IRNSS) tracking and positioning across the entire Vega and Phantom product lines.
Both real-time kinematic and Atlas positioning solutions are enhanced with improved performance in challenging environments. Users of the BeiDou satellite systems and B2b PPP integrators also will see significant advances in their solutions.
SBG Systems is introducing the Pulse-40 inertial measurement unit (IMU), a tactical-grade IMU designed for high performance in harsh conditions, but miniaturized for applications where precision and robustness matter in all conditions.
Use cases include warfare systems, satellite communications, robotics, lidar devices, gimbals, cameras and inertial navigation systems (INS).
The Pulse-40 IMU provides six-degrees-of-freedom. It integrates micro-electromechanical (MEMS) three-axes accelerometers and gyroscopes in a unique redundant design that allows the device size to shrink while pushing performance to its maximum.
The Pulse-40 on a development board. (Photo: SBG Systems)
Among the performance specifications, the Pulse-40 features excellent gyro and accelerometer bias instability of 0.8°/h and 6 µg respectively, enabling long dead-reckoning and maintaining excellent heading performance. With sensors featuring extremely low vibration rectification error (VRE), the Pulse-40 is able to sustain high vibration environments, up to 10 g root-mean-squared.
An embedded continuous built-in-test ensures data reliability during operation, a key parameter for critical applications. The Pulse-40 requires no periodic maintenance. An intensive qualification process — including accelerated aging — guarantees that the sensor behavior is stable over time.
Photo: SBG Systems
Main Features
Size, weight and power (SWaP) design: 12 grams, 0.3W Power consumption
Ultra-low noise gyro (0.08°/√h) and excellent gyro bias instability (0.8°/h)
High-precision accelerometers (6 µg)
Low vibration rectification error: shocks and vibrations MIL-STD 810 qualified
High bandwidth (480Hz) and high data rate (2KHz)
Highly tested and calibrated from –40° C to 85° C
No export restrictions
Research Result
SBG Systems’ sensor calibration and validation tools, initially based on a single axis motion simulator with a temperature chamber, have evolved over the years and are now based on 100% automated, multi-axis motion simulators with temperature chambers. The high level of automation mitigates human-error risk and ensures that all the delivered products meet their specifications. Its INS are the result of extensive research in signal processing, micro-electronics, calibration algorithms and sensor qualification, the company said.
With very low gyro noise and bias instability, the navigation performance is maximized in GNSS-disturbed or -denied environments. The Pulse-40 is export license free and ITAR free.
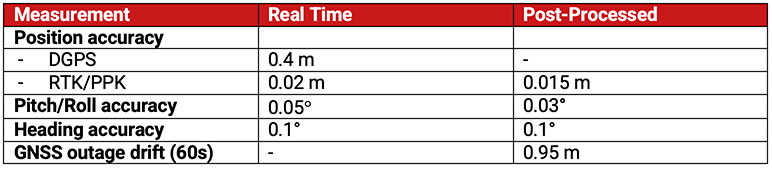
In 2021, OxTS released its smallest, lightest and most affordable inertial navigation system (INS) to date — the xNAV650.
At release, the xNAV650 detailed real-time specifications only. However, after additional testing, OxTS has announced post-processed specifications.
Because of its small size and low weight, the xNAV650 is suitable for SWaP-constrained applications. It is also used in many mobile-mapping scenarios. Alongside OxTS Georeferencer, measurements created by the xNAV650 can be used to georeference point clouds from multiple lidar sensors.
By announcing these new specifications, OxTS aims to keep surveyors informed of the performance they can expect from the xNAV650 in both real time and post-processing.
OxTS has been manufacturing INS for more than 20 years. Their INS are widely used in both the automotive testing and survey and mapping industries.
Tallysman Wireless is introducing a north orientation mark to its TW3000 family of Accutenna precision antennas and its TW5000 family of smart antennas.
The new feature will allow customers to align their antennas, standardize radiation patterns, and increase the synchronicity of their azimuth gain readings across multiple devices.
The new north mark design has been thoroughly tested to ensure it conforms to or exceeds customer expectations and maintains each antenna’s stringent IP69K rating.
The new design will be introduced on Feb. 20 in all Tallysman TW3000 and TW5000 antennas’ radome options (flat and conical) and available colors (white, grey and black).
Hexagon AB, a global leader in digital-reality solutions, has announced the following organizational changes to meet the fast-growing demand for real-time digital worlds.
Juergen Dold, employed with Hexagon since 1995 and most recently serving in a strategic leadership role across Hexagon’s Geosystems, Geospatial and Safety & Infrastructure divisions, will assume the role of executive vice president to lead key enterprise-wide initiatives.
Dold will oversee Hexagon’s focus on the content and platforms necessary to power and operate Smart Digital Reality applications and experiences that empower growth within Hexagon’s existing markets and offer rapid expansion into new market segments.
“Bringing together data sets of all types and formats where you can build, store and share digitalized objects and environments is our sweet spot.”
“Driving company strategy and growth in the metaverse ecosystem — the new digital reality that is emerging in both the professional and consumer markets — is key to Hexagon’s future,” said Hexagon President and CEO Ola Rollén. “Bringing together data sets of all types and formats where you can build, store and share digitalized objects and environments is our sweet spot.”
Dold’s focus will include advancing and expanding the market penetration of Hexagon’s HxDR ecosystem, which includes the HxDR digital reality platform and related business models. The platform allows the convergence and visualization of almost any geospatial or reality-capture data or file format for improved collaboration and decision making.
Artificial-intelligence-driven photogrammetry and point-cloud meshing of terrestrial and aerial data enables a geo “supermesh,” essentially creating the visual foundation for any smart digital reality. Such realities can be put to industry use, analyzing and interpreting infinite data inputs from the real or digital world to solve business problems.
The data can also be leveraged in the metaverse, described by many as the “quasi successor state” of the internet that focuses on social interaction.
Image: Thinkhubstudio/iStock/Getty Images Plus
“The metaverse isn’t a single place, but many digital-reality spaces and experiences that companies like Hexagon are working to make more accessible and immersive,” Rollén said. “Through virtual, mixed or augmented reality functionalities, we can provide a higher sense of presence and engagement.
“Additionally, by providing a connected space built from crowdsourced or professionally captured data, we can improve collaboration and productivity, especially for remote users and teams.
“The digital worlds and objects can be used in everything from filmmaking, gaming and tourism applications to architecture, real estate, land or utilities management, city services and more.”
Dold will continue to report directly to Rollén as a member of Hexagon’s executive management team.
Thomas Harring, president of Hexagon’s Geosystems division, and Steven Cost, president of Hexagon’s Safety, Infrastructure and Geospatial division, will join the Hexagon executive management team, reporting directly to Rollén.
Harring will also assume responsibilities for Hexagon’s Architecture, Engineering and Construction (AEC) business. This includes the software AEC business, which comprises the HxGN Smart Build portfolio previously managed under the PPM division and reported under IES, as well as Hexagon’s complementary sensor-software reality-capture and visualization solutions, such as the award-winning BLK line, already managed by the Geosystems division and reported under GES.
Hexagon’s financial reporting structure consisting of IES and GES will remain the same.
Inertial Labs has launched a new GNSS-aided inertial navigation system. INS-DM is an IP68-rated version of the company’s new generation of super ruggedized units, shielded from electromagnetic interference. The fully integrated device combines the inertial navigation system (INS) with an attitude and heading reference system (AHRS) and air data computer (ADC).
The high-performance strapdown system determines position, velocity and absolute orientation (heading, pitch and roll) for any device on which it is mounted. Horizontal and vertical position, velocity and orientation are determined with high accuracy for both motionless and dynamic applications.
The INS-DM can support multiple types of micro-electromechanical (MEMS) inertial measurement units (IMU) developed by Inertial Labs. The INS-DM also supports other IMUs like the Honeywell HG4930.
The INS-DM uses different multi-constellation (GPS, GLONASS, Galileo, BeiDou and QZSS) GNSS receivers such as the NovAtel OEM7 series or the u-blox F9 series.
The optional ADC is supported by two Honeywell barometric sensors and the ability to support an internal fluxgate or external stand-alone magnetic compass. The INS-DM contains Inertial Labs’ new onboard sensor-fusion filter, state-of-the-art navigation and guidance algorithms, and calibration software.
Key Features
Commercially exportable GNSS-aided INS
3-in-1 strapdown system: INS + AHRS + ADC
Embedded industrial, tactical or navigation-grade Honeywell or Inertial Labs MEMS IMU
Novatel OEM7 or u-blox ZED-F9P high-precision GNSS receiver
GPS, GLONASS, Galileo, BeiDou, QZSS and real-time kinematic signals supported
Total and static pressure sensors for calculating indicated airspeed
SBAS, DGPS, RTK and PPP corrections supported for precise real-time operation
GNSS measurements and IMU raw data for post processing
Advanced, extendable (based on application) embedded Kalman-filter-based sensor fusion algorithms
State-of-the-art algorithms for different dynamic motions of helicopters, UAVs, marine vessels and ground vehicles
Full temperature calibration of all sensing elements
EMC, EMI and ERD protection (MIL-STD-1275)
Environmentally sealed (IP68)
Aiding data: wind sensor, air-speed sensor, Doppler shift from locator (for long-term GPS-denied environments), external position and external heading.
The INS-DM is the result of more than 20 years of Inertial Labs’ experience developing and supplying INS solutions to land, marine and aerial platforms around the world.
Today, many field operations — sowing, tilling, planting, cultivating, weeding and harvesting — rely on satellite-based autonomous guidance technology for agricultural machines. Yet farmers are still challenged by poor signal tracking, signal interference, communication instability and heading inaccuracy in tough environments, such as on uneven ground or slopes or under dense tree canopy. Because of insufficiently advanced navigation technology, ordinary machines fail to achieve the high efficiency expected and might even cause safety hazards. Therefore, the market has been awaiting a high-performance smart antenna with centimeter-level accuracy.
Harxon’s Smart Antenna TS112 PRO provides scalable and reliable positioning solutions for tough agricultural environments, such as uneven ground or fields with underground cables, as well as complicated weather conditions, including rain, fog and dust clouds.
The TS112 PRO integrates in one compact enclosure Harxon’s four-in-one GNSS/4G/Bluetooth/Wi-Fi antenna and a Hexagon | NovAtel OEM GNSS module. The multi-constellation GNSS antenna is designed with Harxon X-Survey technology and features multi-point feeding with high gain and wide beam width, which ensures high phase-center stability for ultimate RTK centimeter-level positioning accuracy. This is realized by subscribing to the Ntrip service via the LTE network to receive corrections or by setting up a local base station to broadcast corrections by radio.
The Hexagon | NovAtel OEM GNSS module is default-enabled for RTK, offering precise positioning and advanced interference mitigation for space-constrained applications and challenging environments. Additionally, users can achieve globally available centimeter-level positioning accuracy by using TerraStar satellite-delivered L-band correction services, with no need to set up an expensive network infrastructure.
TS112 PRO guarantees pass-to-pass accuracy down to 20 centimeters, where relative positioning is critical. It can also provide smoother steering and straighter rows by reducing positioning jumps that might occur during RTK signal outages or when a smart antenna changes positioning modes. Its terrain compensation algorithm is capable of correcting deviations caused by a vehicle’s roll and pitch while working on uneven ground or slopes.