ViaLiteHD Blue OEM module, one of the available formats for the GPS RF over fiber link. (Photo: ViaLink)
Carrying timing signals over optical fiber links to 10+ km, ViaLite’s new GNSS/GPS Fiber Extension Kit has been successfully qualified for use with Microsemi’s timing and synchronization products.
Included in the kit is the ViaLiteHD GPS Link, which is designed for providing a remote GNSS/GPS signal or derived timing reference to equipment located where there is no reception, such as inside buildings, tunnels and mines.
ViaLite designs and manufactures RF over fiber links/systems, support modules, rack chassis and outdoor enclosures. It is a division of Pulse Power & Measurement.
The kit is suitable for GPS, Galileo, GLONASS and BeiDou bands, and the links provide a wide dynamic range with negligible signal degradation from noise or interference.
ViaLite worked closely with Microsemi engineering and product management teams to create the optimized extension kit. Simple single-link extensions are available from both Microsemi and ViaLite, and more complex distributed systems can be defined and supplied by ViaLite.
“We are honored to have been selected by Microsemi as a global supplier for GNSS fiber-optic link equipment,” said ViaLite director of sales Craig Somach.
Microsemi provides synchronization services that assist customers with the planning, deployment and maintenance of synchronization infrastructure.
Their systems need to meet various levels of redundancy, provide multiple timing and frequency outputs, and apply the most accurate GNSS and satcom techniques for measuring offsets between geographically dispersed clocks.
The systems are employed across a wide range of industries, including communications, data centers, aerospace, defense, industrial, financial services, government, oil and gas, power and transportation.
New OEM boards provide next-generation ASIC technology
Phantom 40. (Photo: Hemisphere GNSS)
Hemisphere GNSS has released its next-generation digital and RF ASIC (application-specific integrated circuit) platforms, as well as three new positioning and heading OEM boards – the first products incorporating these technological advancements.
Hemisphere’s new Lyra II digital ASIC and Aquila wideband RF ASIC designs optimize performance and provide the ability to track and process more than 700 channels from all GNSS constellations, the company said. Signals supported including GPS, GLONASS, Galileo, BeiDou, QZSS, SBAS and L-band signal support and tracking for AltBOC and BS-ACEBOC, BeiDou Phase 3, L5, and QZSS/LEX CLAS-D and CLAS-E.
The new ASIC technology offers scalable access to every modern GNSS signal available.
Vega 28. (Photo: Hemisphere GNSS)
Also, the Lyra and Aquila ASIC technology provide the foundation for a new GNSS receiver chipset architecture that significantly reduces the number of board components required, thereby reducing complexity, improving reliability and lowering power consumption.
The powerful technology platform also includes Hemisphere’s new Cygnus interference mitigation technology with built-in digital filtering capabilities and spectrum analysis. The Cygnus technology provides enhanced anti-jamming, interference detection, and mitigation.
“The successful development of these new ASIC platforms is an important milestone on Hemisphere’s technology roadmap,” said Farlin Halsey, president and chief executive officer of Hemisphere. “Lyra, Aquila, and Cygnus-based technologies represent a significant investment and addition to our intellectual property portfolio — one that enables us to continue providing best-in-class GNSS performance and allows our customers and OEM partners to take their solutions to an even higher level.”
Vega 40. (Photo: Hemisphere GNSS)
The new Lyra, Aquila and Cygnus technologies will be made available with the new Phantom 40, Vega 28 and Vega 40 OEM positioning and heading boards.
According to the company, the Phantom 40 positioning board is the first Lyra-based offering in a line of all-new, low-power, high-precision OEM boards. The Phantom 40 is a multi-frequency, multi-GNSS receiver that boasts 700 channels including access to Hemisphere’s Atlas GNSS global corrections network. The 60 mm x 100 mm module with 24-pin and 16-pin headers is a significant upgrade for existing designs using this industry standard form factor.
The Vega 40 and Vega 28 are the first introductions in a new line of low-power, high-precision, positioning and heading OEM boards. The multi-frequency, multi-GNSS Vega 40 and Vega 28 GNSS receivers offer access to 1,100 channels including access to Hemisphere’s Atlas GNSS global corrections network.
The Vega 40 is a 60 mm x 100 mm module with 24-pin and 16-pin headers and is an upgrade for existing designs using this industry-standard form factor. The Vega 28 is a 41 mm x 71 mm positioning and heading module, which represents the smallest GNSS OEM heading module Hemisphere has ever offered to the geospatial market.
Hemisphere is integrating this new technology into other form factors and into many of its existing product portfolios and plans to introduce those products in the coming months.
JEDI-200 reduces the energy of getting one position fix by up to 150 times, according to the company.
Photo: Kolmostar
Kolmostar, a positioning technology company, has launched an ultra-low-power GNSS module at IoT World, which took place May 13-16 in Santa Clara, California.
JEDI-200 reduces the energy for one position fix by up to 150x compared to traditional GNSS sensors, providing a positioning solution for location-based internet-of-things applications, the company said.
1-second ultra-fast time to first fix from cold start
2-meter CEP high positioning accuracy
Supports GPS and Beidou constellations
100-byte compressed ephemeris (EPH) to enable A-GPS with speedy download via LPWAN technologies such as LoRaWAN and NBIoT
High-performance cloud computing based on 50-byte raw position files for optimized radio transmission efficiency and minimum endpoint power consumption
Integrated SAW filter, stand-alone LNA and TCXO
12 x 16 millimeter form factor for easy RF integration
“JEDI-200 supports GPS as well as Beidou constellations,” said Tao Tong, co-founder and CEO of Kolmostar. “While achieving industry’s lowest power consumption, it helps our customers to achieve high accuracy even in dense urban canyon environment where existing GNSS modules on the market often drift due to multipath and other errors.”
The JEDI-200 is designed specifically for IoT applications such as human and asset trackers (for bikes, scooters, vehicles, cargo, livestock, pets and more), smart wearables, smart farming and infrastructures,.
Its reduced level of power consumption and its optimized efficiency with LPWAN technologies solve IoT endpoint deployment’s pain-point of needing frequent recharges or a large battery, enabling new possibilities in location-based IoT applications.
The Trimble CenterPoint RTX correction service, enabling centimeter-level absolute positioning around the world without the need for RTK reference-station infrastructure, is now available to many users, including integrators of professional high-precision equipment and consumer products such as in the automotive sector. Access is provided via a software library compatible with any GNSS device. The corrections now contain detailed integrity information for safety-critical applications.
The RTX infrastructure is made up of approximately 120 globally distributed RTX reference stations. Receivers at these stations transmit measurement data at 1 Hz to the RTX server centers, where the correction data is computed. For redundancy purposes, multiple servers in the United States and Europe are operated. A failsafe architecture avoiding any single point of failure in the processing chain has produced a very high availability of corrections. Today the system supports GPS, GLONASS, Galileo, BeiDou and QZSS satellites. It is a multi-frequency system supporting two or more frequencies for each satellite system.
The correction stream is available to users using L-band signals broadcast via geostationary satellites and IP connections. The L-band transmitted RTX data stream uses a bandwidth of 600–2400 baud, and a highly compressed data format with a resolution of 1 millimeter, with an average latency of 8 seconds in L-band mode and 5 seconds in IP mode. The data stream is encrypted via an Advanced Encryption Standard (AES) with a key length of 256 bits to guarantee safe transmission. Data transmission integrity is assured with a 32-bit cyclic redundancy check attached to every message. The RTX correction stream provides information on satellite position, satellite clock, ionospheric and tropospheric models, and code and phase biases.
The orbit determination is done in real time using a reduced dynamic approach with dynamic models and exploiting the accuracy of the phase measurements after ambiguity fixing. Based on the computed orbits, the satellite clocks are estimated at 1 Hz, where integer ambiguity fixing is performed for the different satellite systems.
Next, a single-layer global ionospheric model is computed and represented through spherical harmonics. There are currently two areas with a denser network than the global network; these cover Europe and the mainland U.S. with more than 1,000 base stations. Using these stations, regional ionospheric and tropospheric models are computed, which then provide a fast convergence (RTX-Fast service).
The satellite position and clock information has centimeter accuracy and allows the client to compute precise point positioning (PPP) with carrier-phase ambiguity resolution. Table 1 shows service accuracy.
Table 1. Accuracy of the RTX corrections from more than three years (June 2015–July 2018) of residuals computation in the European RTX-Fast network. (Table data: authors)
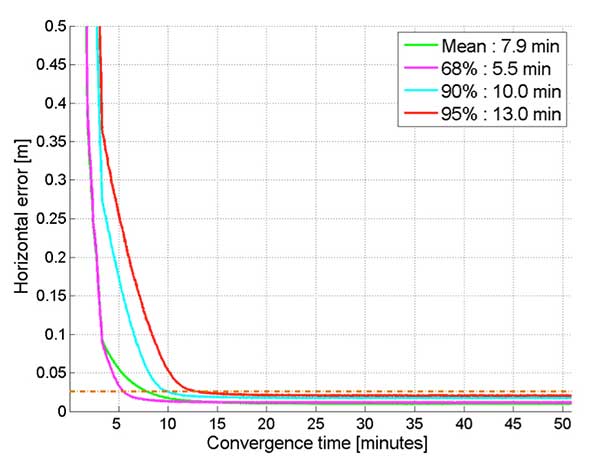
Once the ambiguities are resolved, the position solution is accurate to a few centimeters. The global RTX-Standard service provides convergence times of 7 minutes to 20 centimeters (cm) horizontal error (95%) and to 2.5 cm (95%) in 13 minutes as shown in Figure 2. The regional RTX-Fast service (U.S., Europe) provides convergence times of less than a minute with centimeter accuracy. The warmstart convergence time is approximately 13 seconds.
Figure 2. Global convergence of RTX out of 52 globally distributed stations covering one month of data. (Image: Trimble)
The accuracies specified are achievable with precise Trimble GNSS positioning hardware. For integration into non-Trimble devices, an RTX software library is offered, which gives the user real-time access to the individual data in the RTX correction stream. For use of this library in safety-critical systems such as advanced driving-assisted systems (ADAS) or semi-automated driving, this library was certified to follow the ASIL-B ISO 26262 standard and the automotive ASPICE standard. This library is available for easy integration into third-party applications.
In addition to the real-time RTX solution, a web-based post-processing solution is available for public use free of charge. It is possible to upload static Trimble or RINEX files to the server, post-process the measurement data, and retrieve a precise position in various coordinate frames.
Service integrity is continuously monitored at independent stations from the RTX tracking networks in Europe and the US. The integrity of the service is provided at the correction data domain. The integrity monitoring part of the RTX system minimizes the risk due to events such as unplanned satellite maneuvers or wrong broadcast ephemeris; satellite signal or clock anomalies; ionospheric storms; or problems in transmitting the RTX correction stream.
The monitoring stations compute phase observation residuals (with ambiguity fixing) using the station measurements and the received RTX corrections. These residuals represent the actual errors of the corrections as seen by the monitoring stations at the line-of-sight (Table 1). The thresholds at which corrections are considered as faulty are the following: 0.5 m + QI (quality indicator) for orbit + clock corrections and regional tropospheric models, and 1.0 m + QI for regional ionospheric models.
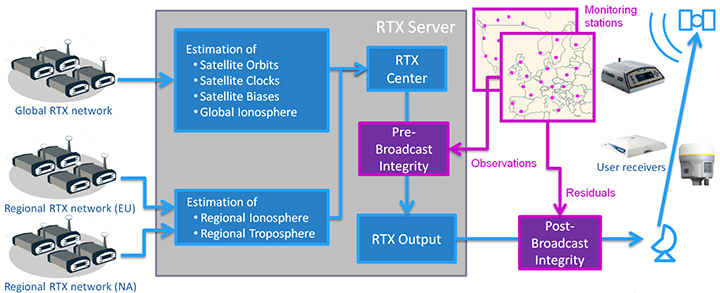
The integrity monitoring consists of two steps (Figure 1): a pre-broadcast check, where potentially faulty corrections are detected and filtered out before leaving the computing server, and a post-broadcast check, where additional errors in the transmission channel are detected and alarms are issued to the users.
Figure 1. Generation and transmission of RTX global and regional corrections, including pre- and post-broadcast integrity monitoring. (Image: Trimble)
Integrity flags and alarms are constantly inserted into the correction stream and output by the RTX client library. The integrity information notifies clients of the presence of integrity monitoring and provides timely alerts in case of detected correction-data integrity violations. The time-to-alert limit goals are 17 seconds for L-band transmission and 13 seconds for IP transmission for the RTX service.
The RTX corrections includes quality indicators. In particular, the quality indicator for the satellite clock includes a “DoNotUse” flag to indicate potential problems with the given satellite. This flag prevents the use of the satellite for positioning when received by the user. The quality indicators of the corrections are indeed a first integrity layer. In 2017 the pre-broadcast integrity monitoring was added to act as a second layer. In 2019, with the addition of the post-broadcast integrity monitoring, a third integrity layer was added to the RTX correction data stream.
The RTX system provides access to centimeter-level corrections allowing centimeter positioning on a global basis. RTX-Fast services are available in Europe and the U.S. with pre- and post-broadcast integrity monitoring currently being deployed.
The authors are engineers with Trimble Terrasat GmbH, Germany.
By Urs Niesen, Jubin Jose, Xinzhou Wu, Qualcomm Technologies Inc.
Emerging automotive applications require reliable but at the same time low-cost positioning solutions. In this paper, we present such a solution by fusing the measurements from several consumer-grade sensors using a tightly coupled centralized filter.
The sensors used are a single-frequency GNSS receiver providing GPS and GLONASS pseudoranges and GPS carrier-phase measurements, a micro-electro-mechanical (MEMS) inertial measurement unit (IMU), a monocular camera, wheel-speed and steering-angle sensors.
We also employ vehicular constraints, integrated as pseudo-measurements. The centralized fusion architecture allows sensor cross-calibration and improves outlier detection. The filter runs in real time on the target platform, producing pose estimates at 30 Hz. Through extensive experimental evaluations, we demonstrate positioning accuracies of sub-meter 95-percentile horizontal errors even in GNSS-challenged deep-urban scenarios.
Conflicting Requirements. Accurate positioning is a requirement for several emerging vehicular applications such as advanced driver-assistance systems (ADAS) and autonomous driving. Positioning solutions for these applications face two competing constraints. To be technically viable, the computed position estimate needs to be reliable in scenarios ranging from open sky to deep urban, with less than 1-meter 95-percentile horizontal error as an often-mentioned target. To be economically viable, the system needs to be built from consumer-grade components.
We reconcile these conflicting requirements by fusing measurements from several low-cost sensors into a single pose estimate using one centralized extended Kalman filter (EKF). A multi-constellation single-frequency GNSS receiver provides GPS pseudorange and carrier-phase measurements and GLONASS pseudorange measurements. These are combined in a tightly coupled integration architecture with a consumer-grade MEMS IMU used to produce the reference navigation solution.
Tight integration enables outlier rejection directly for the raw GNSS measurements. This is crucial in deep-urban scenarios, since many or most raw GNSS measurements could be outliers in these conditions. We use a monocular camera and vehicular sensors, providing four wheel-speed measurements and a steering-angle measurement, as additional aiding sensors.
Constraints. Finally, vehicular constraints are integrated as pseudo-measurements. These sensors have very different noise sources and failure modes, which allows cross-calibration and improves failure and outlier detection. Given the tightly coupled integration in a single EKF, the filter state is quite large and can reach more than 100 dimensions. Despite its size, we are able to run the filter in real time and on target, producing pose outputs at a rate of 30 Hz.
We report the result of extensive experimental evaluations in different scenarios ranging from open sky with good satellite visibility to deep urban with long stretches of no or only limited satellite visibility. In each of these scenarios, we obtain the target accuracy of sub-meter 95% horizontal positioning error.
We show that, in the benign open-sky scenarios, GPS and IMU sensors are sufficient to achieve the target accuracy. However, in challenging deep-urban scenarios, all the integrated sensors are required to attain reliable sub-meter positioning performance.
Sensors and Components. We use Qualcomm SiRFstarV 5e B02 GNSS chipset, a low-cost commercial GNSS product, connected to a NovAtel GPS-702-GG dual-frequency GPS+GLONASS Pinwheel antenna, the only component not consumer-grade, to separate impact of a specific antenna on performance. We plan to evaluate low-cost antennas in the future. We use a TDK InvenSense low-cost MEMS 6-axis IMU (MPU-6150) and a vehicle interface with vehicle sensors through the controller area network bus. Accurate timestamping for tightly coupling sensor measurements is provided by a custom sensor sync board. The processor is a Qualcomm Snapdragon 820 automotive platform for real-time computation. (Qualcomm SiRFstar and Qualcomm Snapdragon are products of Qualcomm Technologies, Inc. and/or its subsidiaries.)
Scientists continue to search for new technologies to serve the PNT mission. One novel way to augment GPS comes from a newly developed technology involving a quantum magnetometer.
Researchers at Lockheed Martin call it Dark Ice; it uses magnetic sensing as an alternative means of determining location without use of satellite signals.
Mike DiMario and his team have developed a prototype magnetometer that uses a synthetic diamond the size of a salt crystal to measure the direction and strength of nearly imperceptible magnetic field anomalies. They overlay that data with maps of Earth’s magnetic field, supplied by the National Oceanic and Atmospheric Association, to produce precise location information.
Special quantum-level impurities in the molecular structure of the diamond, where intermittently a carbon atom drops out and its neighbor is a nitrogen atom, enable the detection of magnetic field waves. These nitrogen vacancy (NV) centers are hyper-sensitive magnetic sensors. When illuminated by a laser, the diamond emits more or less light depending on the surrounding magnetic field’s strength.
The Dark Ice quantum magnetometer measures about 31 centimeters in length. (Image: Lockheed Martin)
Position + Direction. Dark Ice differs from current magnetic sensors aboard ships and planes in that it can measure both the field strength and the direction the field is pointing. “The real advantage of this quantum-based technology is its ability to produce a true magnetic field vector, while at the same time having a very large dynamic range and bandwidth,” DiMario explained.
Project development “was like peeling an onion: with each new layer removed, the team advanced. We had no idea of the expected outcome, other than what system modeling, the laws of physics and good engineering could predict. There was always something we could not have predicted or even thought of.”
In addition to developing this navigational capability, the team has also demonstrated that Dark Ice can harness Earth’s magnetic field to transmit communications across barriers intended to block all traditional signals, and track moving vehicles in real time.
Unjammable. “This project was designed for times when extenuating circumstances might prohibit your use of traditional GPS signals, and you need something that is unjammable, passive and always available. The Earth’s magnetic field meets this description if we can adequately sense and make use of it,” DiMario said.
He wants to downsize Dark Ice to hockey-puck size for convenient use on multiple platforms. “In real-world conditions, if I can get within 200 meters of GPS accuracy, that would be a huge success,” he claimed. Such precision would serve as a backup or verification to GPS, not a sole-means navigation system.
With its powerful sensing capabilities and small size, Dark Ice could function as the most reliable way to do things like identify hard-to-find watercraft in search-and-rescue missions and fly aboard aircraft in the battlefield. Navigation, search and communications — all in one compact sensor.
The ZED-F9K module is designed to keep cars in their lanes. (Photo: u-blox)
The new u‑blox ZED-F9K GNSS and dead-reckoning module is designed to bring continuous lane accurate positioning to challenging urban environments.
The module offers both high-precision multi-band GNSS and inertial sensors. It combines the latest generation of GNSS receiver technology, signal processing algorithms and correction services to deliver down to decimeter-level accuracy within seconds, addressing the evolving needs of advanced driver-assistance systems (ADAS) and automated driving markets.
The ZED-F9K builds on the u‑blox F9 technology platform. Compatibility with GNSS correction services further improves positioning accuracy by compensating ionospheric and other errors.
The real-time kinematic (RTK) receiver module receives GNSS signals from all orbiting GNSS constellations. The greater number of visible satellites improves positioning performance in partially obstructed conditions, while increased satellite signals delivers faster convergence times when signals are interrupted.
Inertial sensors integrated into the module constantly monitor changes in the moving vehicle’s trajectory and continue to deliver lane accurate positioning when satellite signals are partially or completely obstructed, as is the case when the vehicle is in parking garages, tunnels, urban canyons or forested areas.
When satellite signals become available again, the module combines inertial sensor data with GNSS signals to deliver fast convergence times and high availability of the decimeter-level solution.
The result of this combination of the latest developments in GNSS technology, correction services and inertial sensing is a tenfold increase in positioning performance over standard precision solutions, according to u-blox.
By robustly providing lane accurate position information, the ZED‑F9K meets the needs of ADAS and autonomous driving applications, as well as head units and advanced navigation systems. The module’s accuracy and low latency also makes it suitable for automotive OEMs and Tier 1 automakers developing V2X (vehicle-to-everything) communication systems. By continuously sharing their location with other traffic participants, V2X systems contribute to increasing overall road safety and reducing traffic congestion.
“We designed the ZED-F9K to be a turnkey high-precision GNSS solution that caters to the needs of today’s and tomorrow’s connected cars,” said Alex Ngi, product manager, product strategy for dead reckoning, u‑blox. “The ZED-F9K is unique in that it integrates a multitude of technologies, from the GNSS receiver to the inertial measurement unit and relevant dead reckoning algorithms into a single device for which we can ensure performance throughout the customer product development cycle.”
Qulsar announces precision time protocol (PTP) software availability for Qualcomm FSM platform.
The QNgine-S precision time protocol (PTP) software by Qulsar is now available on the Qualcomm FSM9xxx platform, which is used in small-cell designs worldwide.
With QNgine-S, products based on the FSM9xxx platform have access to a precision timing solution that will enable indoor and urban canyon deployments of small cells, where GNSS signals are rather weak.
As operators continue to upgrade and modernize their networks, there is an increasing demand for a packet-based timing solution (such as 1588 PTP) to support LTE-TDD and LTE-A deployments.
The QNgine–S made available by Qulsar to use with the FSM9xxx platform is designed to enable operators to deploy small cells cost effectively and without a hardware upgrade to existing networks (such as on an existing timing unaware network), especially in locations where GNSS signals are unavailable or impeded.
Qulsar’s 1588 PTP slave technology already powers many eNodeBs and mobile backhaul infrastructure.
QNgine-S is a software-only solution that integrates with the baseband software of the FSM9xxx platform to provide an IEEE 1588-2008 PTP solution capable of recovering both time and frequency from a remote PTP grandmaster.
According to Minoo Mehta, Qulsar’s VP of Sales and Strategic Partnerships, “QNgine-S is optimized to operate in networks that haven’t implemented full on path PTP support. Qulsar’s advanced time recovery servo uses adaptive algorithms to allow time recovery to better than the required 1.1 μs for TDD applications, coupled with frequency alignment better than 15 ppb to meet the air interface requirements — a level of performance that typically cannot be achieved with unsophisticated servos and/or open source PTP solutions.”
“QNgine-S provides an increasingly important solution for synchronization of small cells and remote radio heads,” said Puneet Sethi, senior director, product management, Qualcomm Atheros, Inc. “We applaud Qulsar’s approach to delivering precise timing performance to customers using the FSM9xxx platform without new specialized hardware requirements, as this will help accelerate the global adoption of these platforms.”
Qulsar also provides design engineering services to tailor QNgine-S to variant architectures and platforms as needed and offers lab testing services to validate PTP performance.
New MTi 600-series with flexible interfacing options is backed by software development suite for easy integration into space-restricted host systems such as drones, Xsens said.
The MTi 600-series is a generation of inertial motion sensors which set a new standard in the market for their small size, industrial-grade performance and competitive pricing, Xsens added.
The new MTi 600-series of inertial sensors, supplied in a 31.5mm x 28.0mm x 13.0mm IP51-rated case, produce roll and pitch readings accurate to ±0.2 degrees. GNSS-assisted heading (yaw) measurements are accurate to ±1.0°. Among the products’ new features are a CAN bus interface and NMEA compatibility.
To achieve this performance, Xsens has applied numerous innovations in its latest sensor fusion algorithms, which optimize the output from new accelerometer, gyroscope and magnetometer components.
Photo: Xsens
The MTi 600-series modules are the first from Xsens to include an NMEA-compatible interface for GNSS receivers. This means that users can choose any GNSS receiver chip, module or system to work alongside the MTi-670, a GNSS/INS device that supplements the pitch, roll and yaw outputs available from other MTi 600-series products with global positioning information.
Xsens is demonstrating the high performance of the new modules at its stand 2627 at AUVSI Xponential, taking place in Chicago this week.
The MTi 600-series modules are available for sampling on request to Xsens. Volume production is expected to begin in July.
The new helical antenna in both housed (right) and unhoused form. (Photo: Allison Barwacz)
Tallysman, a manufacturer of high-performance GNSS and iridium antennas, launched the first three products of a new range of helical antennas. Additional models will be announced in the third quarter of 2019 and onward.
Tallysman exhibited at booth 3739 at AUVSI Xponential 2019, which took place April 29 to May 2 in Chicago.
The first three models of the Tallysman helical family are:
HC871 (25g) – A housed, dual band, active GNSS antenna, supporting GPS L1/L2,
GLONASS G1/G2, Galileo E1, and BeiDou B1.
HC872 (36g) – A housed, dual band, active GNSS antenna, supporting GPS L1/L2,
GLONASS G1/G2, Galileo E1, BeiDou B1, and L-Band services.
HC600 (18g) – A housed, passive Iridium antenna.
The active GNSS helical antennas feature a low-current, low-noise amplifier (LNA), and include integrated low-loss pre-filters, to protect against harmonic interference from high amplitude interfering signals, such as 700-MHz band LTE and other near in-band cellular signals.
Available in both housed and embedded OEM versions, the lightweight Tallysman helical antennas have excellent axial ratios, making them ideal for a variety of high-precision unmanned aerial vehicle (UAV) applications, the company said.
The housed Tallysman helical antenna models feature a robust, military-grade plastic case, while the embedded Tallysman helical antenna models can be custom-tuned for any application and configured with a variety of cables and connectors.
“We think — if anything — the price-performance ratio is the biggest benefit,” Allen Crawford, director of key accounts at Tallysman, told GPS World. “The pre-filter is also unique to us; the robustness of the enclosure is unique to us; and also the shortness, which is important to a lot of aerodynamic vehicles.”
Patents have been applied for with respect to several aspects of these new products.
“There is a clear requirement for lightweight, high performance antennas for the rapidly growing UAV market,” said Tallysman President and CTO Gyles Panther. “These new patented helical products are an extension to our existing range of superlight L1/L2 patch antennas, and will provide customers with a wider choice of antenna formats to suit their specific application requirements. These are the first of a number of new products we plan to introduce for this application to support our already wide customer base for UAV antennas.”
Team to provide all-in-one hardware and software platform for commercial drones.
GE Aviation and Auterion are integrating the Auterion Enterprise PX4 operating system on GE Aviation’s Unmanned Aircraft System avionics platform.
The companies signed a teaming agreement to provide a comprehensive hardware and software solution for drone manufacturers and operators seeking to enable commercial drone operations at scale.
The hardware and software platform is designed with commercial vehicle original equipment manufacturers (OEMs) and service providers in mind. It is being displayed at Auterion’s booth (#2009) at AUVSI Xponential, taking place this week in Chicago.
The teaming enables a full-stack solution with airborne autopilot and application computing hardware, flight management, safety management and integration. GE Aviation is providing the avionics hardware, application computing, flight management and integration into airframes. Auterion is providing Enterprise PX4, the operating system that runs on the vehicle, in the cloud and the ground station.
The core architecture of the hardware and software platform has been implemented with the objective of supporting developers through global open software standards while maintaining an independent and authoritative safety controller.
The combination of the two supports long-term flexibility and a high level of design assurance to enable commercial drone operations beyond visual line of sight (BVLOS) and within complex airspace and obstacle environments.
Flight testing of the hardware and software platform took place over the last three weeks at Reno-Stead airport in Reno, Nevada.
“In demonstrating a seamless integration of ground, cloud and airborne components, we’ve reached another milestone in helping to unlock the value in autonomous and UAS advanced operations,” said Alan Caslavka, president of Avionics Systems for GE Aviation. “Auterion’s open standards leadership and cooperative legacy with the developer community is the foundation to scale a sustainable solution critical for commercial drones.”
“We are excited about the collaboration with GE Aviation that allows us to offer our operating system on high reliability hardware to meet future regulations,” said Kevin Sartori, Co-Founder of Auterion. “With this collaboration, the combined solution will significantly reduce barriers commercial cargo drones face flying in manned airspace or inspection drones to flying in urban areas.”
A roundup of recent products in the GNSS and inertial positioning industry from the April 2019 issue of GPS World magazine.
OEM
GNSS receiver
With embedded 9-DOF IMU
Photo: Rokubun
The Argonaut GNSS receiver is able to provide geo-location with real-time accuracy of 2 meters and off-line accuracy better than 0.4 meters using Argonaut PaaS. This is possible because GNSS raw measurements, together with inertial measurement unit (IMU) nine-degrees-of-freedom (9-DOF) measurements, are stored for offline GNSS processing (PPK, RTK, DGNSS). Argonaut will also register external events such as camera triggers within microsecond resolution and decimetric geo-location accuracy. The embedded IMU allows for an increased rate of navigation fixes as well as robust solutions in scenarios with impaired GNSS availability. Rokubun, rokubun.cat
Galileo AltBOC addition
Plus atmospheric corrections
Photo: Skydel Solutions
SDX GNSS simulator update version 19.1 adds Galileo AltBOC signal generation, new atmospheric errors, SBAS improvements and SV antenna patterns. SDX users licensed with the Galileo E5 signal will be able to generate 8 Phase Shift Keying (8-PSK) constant envelope AltBOC after upgrading to SDX 19.1. Version 19.1 also adds a new error type to all SDX users: atmospheric delays. These errors can be compensated for with the SBAS option installed. Skydel Solutions, skydelsolutions.com
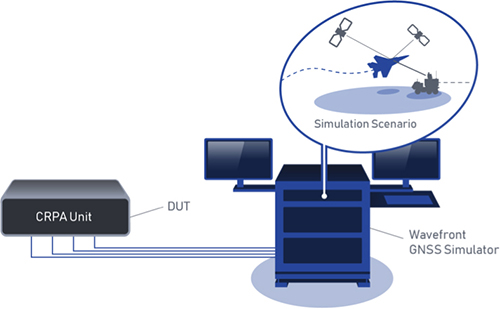
Wavefront simulator
Added to software-defined platform
Photo: Skydel Solutions
The BroadSim Wavefront Simulator is a new addition to Skydel’s software-defined platform. The BroadSim Wavefront further extends the capabilities achieved by BroadSim Anechoic, incorporating support for controlled radiation pattern antenna (CRPA) and multi-element receiver testing. Powered by Skydel SDX, the simulator’s features include phase-coherent simulation, real-time automated phase calibration, scalability from 4 to 16 elements, and advanced jamming and spoofing scenarios. Talen-X, www.talen-x.com
GNSS antenna
For high-precision and autonomous applications
Photo: Maxtena
The M7HCT-A-SMA is a high-accuracy, multi-frequency active quadrifilar helix GNSS antenna designed for high-precision and autonomous multi-frequency applications. The design offers concurrent GNSS reception on L1 (GPS, GLONASS, Galileo, Beidou) and L2 (GPS L2C, Galileo E5B and GLONASS L3OC) in a rugged, compact and ultra lightweight form factor. The antenna is designed for GIS, RTK and other high-accuracy GNSS applications such as the drone and automotive markets. Helicore technology provides exceptional pattern control, polarization purity and high efficiency in a 25-gram form factor. The antenna offers up to 30-dB gain for GNSS applications in one radome housing with a single SMA connector. Maxtena, maxtena.com
Portable simulation
Solution for field-test requirements
Photo: CAST Navigation
The CAST-1000 duplicates GPS RF signals and uses dual-frequency signal generation technology. This allows for duplicate testing in the laboratory or the field and real-time or configured control. The CAST-1000 is mobile and portable, which makes it the ideal solution for field test requirements. Producing GPS and GLONASS signals with up to 12 satellites in view, the CAST-1000 simulates signals for satellites of P code on L1 and L2 and C/A code on L1. The GPS RF signal is dual-frequency and has a 12-channel configuration for any combination of visible space vehicles. The system is highly programmable — operators can choose from an array of vehicle types and replicate dynamic motion for all kinds of vehicles, from terrestrial to aquatic, airborne to space-based. By utilizing 6-DOF dynamic profile data collected in the field and through profile configuration, a trajectory can be created. The CAST-1000 also features a performance evaluation module, allowing for comparisons between raw and filtered data. CAST Navigation, www.castnav.com
Survey & Mapping
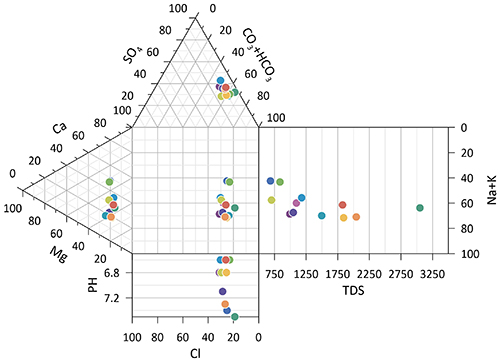
Graphing software
New plotting features
Photo: Golden Software
Version 14 of the Grapher scientific graphing package offers new plotting and customizing functionality based on user feedback. The Grapher software gives users deeper insights into their data by providing them with 80 flexible and easy-to-use 2D and 3D graphing tools for plotting, analyzing and displaying scientific data sets. The package is used extensively by scientists and engineers in oil & gas operations, hydrologic/geochemical studies, environmental consulting, mineral exploration and academic research. New or upgraded features include Enhanced Plotting (the ability to plot data in rows and columns, perform one-button Durov class plots, and easily generate multi-plot reports); and Improved Bar Charts (bar charts are more versatile, offering variable bar widths and differentiated fill colors for negative and positive). Golden Software, www.goldensoftware.com
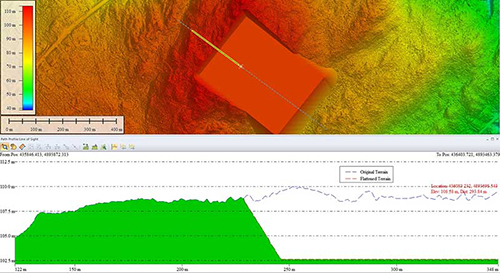
GIS software update
New lidar functionality
Photo: Blue Marble Geographics
Global Mapper version 20.1 offers new and updated geospatial tools, as well as performance improvements throughout the application. Enhancements to version 20.1 include a new zooming function in the path profile window, a digitizer tool for automatically closing gaps between features and, for lidar module users, a point proximity query function. Blue Marble Geographics, www.bluemarblegeo.com
Survey application
For the geospatial industry
Photo: Global GNSS
The GNSS Surveyor mobile application provides location information and quality position data in real time with sub-meter to centimeter accuracy. It connects to any external GNSS receiver via Bluetooth. Features include a one-touch configured command to communicate directly with the GNSS Bluetooth device; location information and quality of the position data in real time with centimeter accuracy; GPS data such as position, height, satellites and velocity; and constellation information for GPS, GLONASS, Galileo, BeiDou, QZSS and SBAS satellites. It also includes a direct IP feature for real-time kinematic (RTK) corrections data. An internal NTRIP client loads RTCM data from the internet. Location information is collected as latitude and longitude, altitude, speed or pace, bearing and UTC time. GNSS precision includes global coverage, centimeter-level accuracy, fast time to first fix, multi-constellation and multi-band, and highest security. Navigation uses include ground robotics navigation, lane-level navigation, heavy machine navigation, industrial navigation and tracking, and commercial UAV. Global GNSS, globalgnss.com
Indoor mapping
Slam technology removes point cloud artifacts
Photo: NavVis
The SLAM-based NavVis M6 Indoor Mobile Mapping System (IMMS) now automatically detects and removes point cloud artifacts, including moving objects in static scenes. The latest IMMS release removes artifacts from point clouds during the post-processing of scan data (see before and after image above). Fringe points and dynamic objects are two common types of point cloud artifacts that affect all 3D laser scanning devices. The NavVis M6 IMMS uses laser scanners to capture a high volume of measurement points of an environment. With the latest software update, the algorithms applied during the post-processing of scan data uses the multiple observations to detect whether measurement points actually exist in the physical space. If it is determined that the point does not exist and is instead resulting from the laser beam hitting an edge or an object moving through the space, this point is automatically removed. The result is a much cleaner, crisper point cloud that requires less clean-up time in point-cloud editing software and that is easier to use for applications such as BIM modeling. NavVis, www.navvis.com
Mobile & UAV
Adventure handhelds
Larger display, improved access to Satellite imagery
Photo: Garmin
Garmin has updated two premium adventure-oriented handhelds, the GPSMAP 66s and the GPSMAP 66st, with expanded wireless connectivity, direct-to-device access to BirdsEye satellite imagery, weather forecasting and a larger 3-inch sunlight-readable color display. The GPSMAP 66st offers preloaded topographic maps for U.S. and Canada, with detail of coastlines, rivers, summits, terrain contours and geographical points. Connectivity to the new Garmin Explore app and the BirdsEye Satellite Imagery (no annual subscription) bring high-resolution photo-realistic route views. Weather updates come via Bluetooth to a compatible mobile device. The Explore app includes features for outdoor navigation, trip planning, mapping and data sharing. Features include multi-GNSS satellite support and altimeter, barometer and compass sensor capabilities; 16 hours of battery life in full GPS mode; LED flashlight and SOS beacon; built to military standards for thermal, shock and water performance (MIL-STD-810G); RINEX data logging that enables sub-meter accuracy of GPS position after post processing. Garmin, garmin.com
RTK Hexacopter
Integrated GNSS improves accuracy
Photo: Yuneec International
The H520 hexacopter is now available with a real-time kinematic (RTK) system. The fully integrated RTK satellite navigation enables extremely accurate recurring images and faster 3D mapping. It also makes automated inspection flights easier and more precise. The H520 RTK is suitable for commercial applications that require maximum precision. By using RTK technology, the H520 can now fly much closer to objects for inspection because the UAV positions itself precisely in the centimeter range (1 cm + ppm horizontal / 1.5 cm + ppm vertical) rather than in the meter range, which is standard for the H520. Yuneec International, us.yuneec.com
Web-based data service
Enables sharing of UAV data sets
MAGNET Collage Web is a web-based service enabling the sharing and collaboration of UAV and scanning data sets. Version 1.3 allows operators to work with more types of data with greater flexibility, including the ability to import BIM models, as well as CAD and GIS data. It can be used to overlay as-built laser scans and design data to visualize proposed changes and detect construction issues. The software supports OBJ, FBX and 3DS formats. The upgrade also includes new direct publishing functionality for CAD and GIS data files through the browser. Topcon, topconpositioning.com