Spirent Communications and Oasis Smart SIM have created a strategic partnership to remove connectivity and network provisioning barriers for the rapid development of connected products and devices, such as cameras, smart vehicles, logistics and production goods.
Spirent Communications is a provider of device intelligence solutions, and Oasis Smart SIM is a global Universal Subscriber Identity Module (USIM) connectivity and management provider.
The partnership marks both firms’ entry into the connected Internet of Things (IoT) business, which analyst Gartner forecasts will result in 6.4 billion connected devices worldwide in 2016, reaching 20.8 billion by 2020.
Beefore launching the new product, Spirent and Oasis undertook extensive research into the hurdles that original equipment manufacturers (OEMs) face in making diverse connected products, ranging from white goods in the kitchen to those used in animal management, suitable for sale in world markets. It became clear that old technologies and business models based on use of the traditional SIM were not suitable for IoT device activation and subscription provisioning on a global scale.
The partnership between Spirent and Oasis will introduce a two-click software solution, including USIM functionality, that OEMs can embed into products for seamless cellular service activation in any of the world’s markets, as well as life-cycle management.
The new product will be showcased on the stands of Spirent (Hall 6, Stand 6J37) and Oasis (Hall 2, Stand 2D13/15/19MR) at Mobile World Congress, in Barcelona (22-25 February, 2016).
“Spirent and Oasis have teamed up to help manufacturers build better and smarter products for the connected world,” said Dennis Juul Poulsen, general manager of Spirent’s IoT Connectivity and Subscription Management business. “Be it a connected truck or a pair of smart running shoes, OEMs in whatever vertical market now have a solution that provides customers with seamless instant connectivity and the freedom to choose whatever cellular service provider they wish.”
“Spirent’s unique automatic access point name (APN) setup and remote subscription management solution with Oasis’ embedded smart USIM functionality is a game changer in connected products and devices,” said Olivier Leroux, CEO of Oasis Smart SIM. “OEM vendors now have a leaner way to manufacture, distribute and maintain connected products compared to solutions centered on the traditional SIM.”
Next generation for precise scientific and geodetic applications
The PolaRx5 offers 544 hardware channels for robust and high-quality GNSS tracking. The receiver supports all major satellite signals including GPS, GLONASS, Galileo and BeiDou, as well as regional satellite systems including QZSS and IRSS. Septentrio’s Advanced Interference Mitigation (AIM+) technology enables it to filter out both intentional and unintentional sources of radio interference, from narrowband signals over high-powered pulsed signals to chirp jammers and Iridium interferers. Septentrio’s APME+ multipath mitigation technology eliminates short delay multipath without introduction of bias and guarantees superior measurement quality. The user can deactivate APME+ to obtain unmodified measurements.
Bentoni is a positioning antenna for all of the global public satellite constellations: GPS, GLONASS, BeiDou and Galileo. It is designed to be used in trackers, portable devices, network components, drones and wearable electronics. It offers high performance and maintains good isolation in situ within a device. Bentoni is a flexible FPC antenna in Antenova’s flexiiANT product range. They are supplied with an I-PEX MHF connector and a 1.13 mm RF cable in a choice of three lengths. They can be folded to save space in operation within a device, with the aim being plug-and-play simplicity. The antennas are self-adhesive mounted so that they can easily be fixed inside an electronic device.
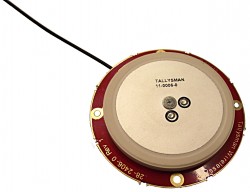
The Tallysman TW2926 antenna is an unhoused OEM version of the TW2920, designed for simultaneous reception of L-band correction signals and all of the upper band GNSS signals, including GPS L1, GLONASS G1, Galileo E1 and BeiDou B1. The TW2926 is 56 millimeters in diameter and has four drilled plated holes for secure mounting within customers’ products. It can be custom tuned to ensure optimal performance within an enclosure. The 1-dB bandwidth of both the TW2920 and TW2926 covers 1525–1559 MHz for the L-band downlink and 1559–1610 MHz for the upper-band GNSS. The LNA provides 28-dB of gain. The antennas employ Tallysman’s Accutenna technology, which provides strong cross-polarization rejection for greatly improved multipath rejection, low axial ratio and tight phase center variation.
The Near Field Communication (NFC) 88NF100 controller with active load modulation (ALM) is desgined to support the smallest antenna sizes critical to mobile, the Internet of Things (IoT), wearable and automotive applications. Adhering to NFC Controller Interface (NCI) Technical Specification version 1.1, the 88NF100 provides an extended operating range and is extremely energy efficient to enable extended battery life for power-critical applications. ALM technology supports the smallest antenna sizes to enable OEMs to implement NFC capabilities into small form-factor designs. The controller has extremely low power operation in polling mode to provide increased battery life for power critical applications and three single-wire protocol (SWP) interfaces to secure element (eSE) devices for secure payments. The two-pin antenna interface supports a maximum distance of two meters between the chip and antenna.
Designing Better Maps: A Guide for GIS Users, second edition, is an updated and comprehensive guide to creating maps that communicate effectively. Cartographer Cynthia A. Brewer covers the basics of good cartography, including layout design, scales, projections, color selection, font choices and symbol placement; she also describes her ColorBrewer application, an online color selection tool. The second edition includes a new chapter on map publishing. One reviewer wrote, “It is also worth a look by experienced cartographers who seek a refresher and a few new tips.” Brewer is a professor and chair of the Department of Geography at Pennsylvania State University and map and atlas design consultant.
Eos Pro Tools is tightly integrated with google map
Eos Pro Tools is a comprehensive RTK NTRIP app for Android that works with its Arrow line of RTK GNSS receivers. An Arrow GNSS receiver combined with the NTRIP app turns an Android smartphone or tablet into a powerful data collector capable of recording 1-centimeter accurate GIS data in real-time. The app, named Eos Tools Pro, has user-configurable audible and visual alarms to alert the user of high PDOP, lost RTK correction, unacceptable correction age and several other important metrics. It supports all current and future constellations (GPS, GLONASS, Galileo and Beidou). Detailed satellite information such as a skyplot that plots each visible satellite, whether it’s being used or not, and signal strength bar graphs from each constellation are also displayed. Finally, a terminal screen displays the NMEA data flowing and allows the user to send commands to the receiver.
Lightweight, ergonomic design for the mobile workforce
The 7-inch Algiz RT7 Android tablet is fully rugged, meeting stringent MIL-STD-810G U.S. military standards for protection against drops, vibrations and extreme temperatures. Its IP65 rating means that it’s waterproof as well as fully sealed against sand and dust. The tablet comes with a built-in accelerometer, gyroscope and e-compass as well as a stand-alone u-blox EA-7M GPS receiver for navigation, along with built-in Qualcomm IZat location services.
The i80 GNSS receiver computes a true triple-frequency real-time kinematic (RTK) tilted pole solution using all four worldwide and multiple regional constellations, providing a future-proof sub-centimeter RTK solution to surveyors and contractors. Without the need of a data collector or computer, the i80’s LCD graphic user interface allows for common workflow operations, such as static logging, autobase, autorover and UHF channel selection, to be easily performed. The CHC i80 incorporates dual hot-swappable batteries, allowing for days of uninterrupted work. While small and lightweight, it is packed with a full array of sensors and modules: multiple micro-electrical-mechanical (MEMS), internal Tx/Rx UHF, multiband cellular modem, Wi-Fi, Bluetooth, serial and USB.
All-in-one GPS, GNSS and RTK Data Collector Series
The SXPro series is built for mobile survey and GIS users for applications such as water, electric and gas utilities; transportation; mining; agriculture; and forestry. The professional-grade rugged handheld receivers include a battery life of more than 10 hours on a charge as well as a large outdoor-viewable touchscreen. The handhelds are rated IP65 for protection against water and dust, and equipped with a 5-megapixel autofocus camera and Microsoft utilities. The SXPro RTK (real-time kinematic) model offers 220 multi-constellation channels for centimeter accuracy with RTK networks. The SXPro GNSS offers 372 multi-constellation channels for sub-meter accuracy with SBAS corrections.
New point cloud analysis and visualization capabilities
The latest release of ENVI software adds lidar point cloud analysis and visualization capabilities that previously were only available in the ENVI lidar software package. ENVI 5.3 offers users a single software interface to work with hyper-spectral, multi-spectral, panchromatic and lidar data. The out-of-the-box functionality includes 3D point-cloud visualization, derived terrain product generation (such as digital elevation models) and lidar analytics such as viewshed line-of-sight calculation. For users who need point-cloud or terrain products in an area where collecting lidar is not feasible or is too expensive, the ENVI Photogrammetry Module is able to generate synthetic 3D point clouds from stereo optical imagery to take advantage of existing imagery archives. The dimension of time can be critical for a thorough geospatial analysis of an area, and the new ENVI release has added enhancements to the Spatio-Temporal analysis toolset. Spatio-Temporal analysis visualizes change and derives statistics from data over time, enabling users to observe past events to better predict upcoming activities.
The eight-rotor DJI Agras MG-1 UAV can load more than 10 kilograms of liquid for crop-spraying and can cover between seven and 10 acres per hour — more than 40 times more efficient than manual spraying. It can fly up to eight meters per second and adjusts spraying intensity to flying speed to ensure even coverage. It is dustproof, water-resistant and made of anti-corrosive materials. It features DJI’s flight-control system and microwave radar to ensure centimeter-level accuracy. During flight, the drone scans the terrain below in real time, automatically maintaining its height and distance from plants to ensure application of an optimal amount of liquid. The drone’s intelligent-memory function means after the Agras MG-1 is brought back to base for refill or recharge, it will return to its last memory point to pick up spraying where it left off.
The EXCIPIO is an anti-drone system that uses a drone to shoot out a net to capture another drone.The EXCIPIO Aerial Netting System is comprised of a UAS equipped with a first-person view camera and a net-firing gun. When the EXCIPIO has reached the threat target, it fires a net, then can either release the net with the target ensnared or keep the net tethered. Though the initial system concept was focused on intercepting and neutralizing an airborne UAV, the conceptual applications have expanded to include manned aircraft, ground vehicles, people and animals (whether airborne or on the ground).
Bordelon Marine, providers of vessel services to operators in the Gulf of Mexico and around the world, has selected acoustically aided inertial navigation technology from Sonardyne Inc., Houston, for its new ultra-light intervention vessel (ULIV) Brandon Bordelon.
The dual Ranger 2 Pro DP-INS systems, the highest specification available, will be used to track remotely operated underwater vehicles (ROVs)during inspection, repair and maintenance activities and provide an independent position reference for the vessel’s Marine Technologies Class 2 dynamic positioning system.
Specialized vessels such as the Brandon Bordelon conventionally rely on GNSS and ultra-short baseline (USBL) acoustics as their primary sources of dynamic positioning reference data.
However, a vessel’s station-keeping capability can be compromised in the event that the USBL is affected by thruster aeration or noise and the GNSS signal is simultaneously interrupted. The latter is particularly common around equatorial regions and during periods of high solar radiation.
Sonardyne’s Ranger 2 Pro DP-INS system addresses this operational vulnerability. It aids vessel positioning by exploiting the long term accuracy of Sonardyne’s Wideband 2 acoustic signal technology with high integrity, high update rate inertial measurements. The resulting navigation output has the ability to ride-through short-term acoustic disruptions and is completely independent from GNSS.
The Brandon Bordelon was delivered at the end of 2015 and is under a 60-day contract with Tidewater Subsea. Designed to support complex inspection, repair and maintenance operations, the vessel features a high-capacity deep-water crane, infrastructure for two work-class ROVs and a large, reconfigurable back-deck area.
In addition to the system’s deep water positioning performance and safety benefits, DP-INS has been proven to deliver valuable time and cost savings for vessel owners. It does not need a full seabed array of transponders to be installed and calibrated before subsea operations can commence.
For most subsea tasks, positioning specifications can be met with only one or two transponders deployed on the seabed. Additionally, as the system needs only occasional aiding from the acoustics, transponder battery life is substantially increased and the need to task an ROV to deploy and recover transponders for servicing is reduced.
The equipment supplied to Bordelon Marine included Sonardyne’s ship-mounted inertial navigation sensor and two HPT 7000 acoustic transceivers. The HPTs have been installed on the Brandon Bordelon through-hull deployment poles and are optimised for tracking and dynamic positioning in ultra-deep water.
Wes Bordelon, President/CEO Bordelon Marine said, “Equipping the Brandon Bordelon with Sonardyne’s Ranger 2 DP-INS, reflects our commitment to providing high-tech, high-spec equipment on our fit-for-purpose Stingray vessels and ensuring our fleet is safe, efficient and cost-effective.
“Ranger 2 DP-INS is a mature, field proven technology that addresses operators’ need for a robust, independent DP reference that provides an update rate and accuracy on par with GNSS,” said Ralph Gall, Technical Sales Manager at Sonardyne in Houston. He added, “The Brandon Bordelon joins a significant fleet of vessels which depend upon our acoustically-aided inertial technology for safer and more efficient dynamic positioning operations.”
u-blox has released new firmware, FW 3.01, for its u-blox M8 concurrent multi-GNSS platform.
u-blox M8 FW 3.01 now also supports Galileo, in addition to GPS, GLONASS, BeiDou, QZSS and SBAS. It can track up to three constellations concurrently and makes use of all SBAS and QZSS augmentation systems at the same time.
With Galileo fully deployed, the European positioning system will provide access to 24 additional satellites, significantly increasing availability of GNSS signals and further improving position accuracy in challenging urban environments. u-blox M8 supports Galileo-based eCall, the European emergency call system, which will be required in new vehicles starting 2018. u-blox M8 is also compliant with ERA-GLONASS, eCall’s Russian equivalent.
In addition, with FW 3.01, u-blox M8 now boosts the BeiDou acquisition sensitivity and adds support to the Indian GAGAN augmentation system.
u-blox M8 chips and modules are able to operate reliably in difficult environmental conditions as well as in a security attack scenario. Because a growing number of wireless systems rely on GNSS positioning, the threat of attacks, such as diversion of drones or hijacking of car electronics, has become very real.
Security mechanisms are now embedded in FW 3.01, the result of years of intense research at u-blox R&D labs. An anti-spoofing feature detects fake GNSS signals, and a message integrity protection system prevents “man-in-the-middle” attacks. Yet another security function detects and suppresses jamming. Since all this functionality is already built into u-blox M8 FW 3.01, these security mechanisms are a lot more effective than an external system implementation.
Automotive-grade u-blox M8 products benefit from an extended operating temperature of -40 to +105°C and are AEC-Q100 Grade 2 qualified. The extended temperature range allows more flexibility in vehicle integration, such as by integrating a u-blox M8 GNSS receiver into a roof-top antenna where temperatures can reach 105°C.
Another feature of FW 3.01 is the 10 percent power reduction compared to earlier firmware versions of u-blox M8.
The u-blox M8 platform supports applications where navigation performance, reliability, and high accuracy are paramount, whereas the recently announced u-blox 8 platform addresses power sensitive applications such as wearables. u-blox M8 and u-blox 8 products are pin- and software compatible.
Firmware to upgrade existing flash-ROM based u-blox M8 products can be downloaded from the u-blox website. Products with FW 3.01 in ROM will become available in Q2′ 2016.
Antenova Ltd., manufacturer of antennas and RF antenna modules for machine-to-machine (M2M) and the Internet of Things, is adding two new positioning antennas to its range of flexible FPC antennas.
Bentoni is a positioning antenna for all of the global public satellite constellations: GPS, GLONASS, BeiDou and Galileo. It is designed to be used in trackers, portable devices, network components, drones and wearable electronics.
Asper is a dual antenna with two separate antenna systems in a single form factor. It combines a 1559–1609 MHz antenna with a 2.4–2.5 GHz antenna in the same part for positioning applications with wireless connectivity as well. This antenna is suitable for sports cameras, trackers, dash cams, portable devices, network devices and wearable electronics.
Both antennas offer high performance and maintain good isolation in situ within a device.
Bentoni and Asper are the latest flexible FPC antennas in Antenova’s flexiiANT product range. They are supplied with an I-PEX MHF connector and a 1.13 mm RF cable in a choice of three lengths. They can be folded to save space in operation within a device.
Antenova’s antenna design team aims to create antennas that a product designer can integrate with the other circuits in a design in a convenient way, rather than designing a product to fit around the antenna. The aim of these antenna designs is plug and play simplicity — they are self-adhesive mounted so that they can easily be fixed inside an electronic device.
Bentoni antenna and Asper antennas are available to order now.
The Association for Unmanned Vehicle Systems International (AUVSI) has renamed its major annual conference — XPONENTIAL — and the 2016 edition will be held in New Orleans at the Morial Convention Center on the west bank of the Mississippi, May 2–5. The huge convention center is hosting the event across two large halls, with more than 350,000 square feet of space for up to 600 exhibits.
With 370 exhibitors already signed up, you might want to decide who to put on your visit list if you’ve never been to one of these AUVSI exhibitions. Because just roaming the show floor without a plan can lead to frustration and exhaustion — the show is huge, not only in square feet, but also in the number and size of the exhibits. Full-size helicopters, Humvee-type vehicles and drones — lots and lots of different types of unmanned air vehicles (UAVs) or drones for any and all applications.
There is everything a drone manufacturer might need to develop and integrate into the latest small (sUAV), medium or large quadcopter, hexcopter, octocopter, fixed wing or STOL (short take-off and landing) air vehicle. Plus, you’ll find ground vehicles and surface and underwater vehicles of all shapes and sizes.
Propellers, engines, payloads of all sorts including cameras, radars, IR and lasers, plus connectors and electrical, mechanical and electro-mechanical components and systems, manufacturing systems, 3D printing, modeling, designing, developing — all in all, too much stuff to even mention everything that goes into, onto and processes/tools for manufacturing a UAV.
But, of course, our interest might be more readily captured by the booths exhibiting flight-control systems, sensors, antennas, autopilots, inertial, satellite and terrestrial radios and services, computing, GNSS and other guidance systems — and even avionics for drones. UAV ground control systems (UAV + ground control system = unmanned air system or UAS) are also present in force, along with all their constituent pieces. A ground control system can be more complex than a larger UAV, or sometimes as simple as an app on a tablet.
Applications are also featured in exhibit groupings for survey and mapping, air and start-up. Also, a large number of U.S. states and related academic, research, test and development organizations are represented this year, along with dedicated Chinese, French, Canadian and UK exhibit areas.
There also seems to be some presence for insurance, legal, certification and training organizations aiming to support the emerging commercial opportunities that Federal Aviation Administration (FAA) Section 333 approvals have enabled. The FAA continues to grant Section 333 exemptions, which have allowed commercial, research and agency drones to fly in the U.S. National Airspace System (NAS) on a trial and operational basis.
The FAA issued a fact sheet in mid-December that outlined safety reasons for federal oversight of aviation and airspace, and explained federal responsibility in this area. The object appears to be to let states know that the FAA has federal jurisdiction, and is therefore in charge of regulating access to and operations in the U.S. NAS. The fact sheet perhaps also aims to slow down recent state and city efforts — such as those in Miami, Albany County and New Jersey — to publish their own ordinances and laws related to UAV activity.
Meanwhile, the FAA’s recent UAV registration requirements for anything unmanned that takes to the air in the U.S. have met with mixed reactions. U.S. drone operators have indeed already complied and registered more than 181,000 UAVs, but one individual has filed a suit against the FAA alleging Section 333 does not allow the FAA to make any new rules or regulations regarding model aircraft if they’re flown for hobby or recreational purposes. We’ll have to see how this all turns out — AUVSI, which represents a good portion of the UAS industry, has already come out supporting the FAA’s UAV registration program.
AUVSI continues to call for the FAA to publish regulations that would allow small UAVs to operate in the U.S. NAS. These small UAV regulations have been in the works for several years and have yet to be formally released or implemented by the FAA. AUVSI argues that if these regulations were to be released, the commercial UAV industry would really take off and produce billions in revenue and create thousands of jobs.
In order to help move UAV integration forward, NASA has been working on traffic management concepts for UAS. The first section of this system was tested in August, looking mostly at topics such as geofencing so drones automatically avoid certain restricted areas, and also trajectory planning.
Google and Amazon have also been looking into UAS Traffic Management (UTM) systems. Amazon has proposed a high-speed UAS transit corridor between 200 and 400 feet, with slower vehicles flying below, and larger ones above it. Verizon has also been exploring how cellular networks could be used to enhance drone safety in the future. The FAA’s Pathfinder Programs also aim to investigate areas, such as beyond-visual-line-of-sight flights, that may assist in the development of UTM.
So, XPONENTIAL 2016 is a great UAV show to put in your calendar (May 2-5 in New Orleans) if you have interest in learning more about UAV/UAS, or in moving further into the growing business of UAVs, plus lots of related activity promising growth for actual UAV commercial operations in the U.S. There is always a lot going on nowadays in the world of unmanned vehicles.
In his final State of the Union address, delivered Jan. 12, President Obama signaled his intent to invest in a 21st century transportation system.
U.S. Transportation Secretary Anthony Foxx has revealed part of the president’s proposal: a 10-year, nearly $4 billion investment to accelerate the development and adoption of safe vehicle automation through real-world pilot projects.
Secretary Foxx also announced that the U.S. Department of Transportation (DoT) is removing potential roadblocks to the integration of innovative, transformational automotive technology that can significantly improve safety, mobility and sustainability.
Secretary Foxx made the announcement at the North American International Auto Show in Detroit, where he was joined by leaders in technology, executives of traditional auto manufacturers, and newcomers to the industry.
“We are on the cusp of a new era in automotive technology with enormous potential to save lives, reduce greenhouse gas emissions, and transform mobility for the American people,” said Secretary Foxx. “Today’s actions and those we will pursue in the coming months will provide the foundation and the path forward for manufacturers, state officials, and consumers to use new technologies and achieve their full safety potential.”
The president’s FY17 budget proposal would provide nearly $4 billion over 10 years for pilot programs to test connected vehicle systems in designated corridors throughout the country, and work with industry leaders to ensure a common multistate framework for connected and autonomous vehicles.
Secretary Foxx also unveiled policy guidance that updates the National Highway Traffic Safety Administration’s (NHTSA) 2013 preliminary policy statement on autonomous vehicles. The new guidance, just released, reflects the reality that the widespread deployment of fully autonomous vehicles is now feasible.
“NHTSA is using all of its available tools to accelerate the deployment of technologies that can eliminate 94 percent of fatal crashes involving human error,” said NHTSA Administrator Mark Rosekind. “We will work with state partners toward creating a consistent national policy on these innovations, provide options now and into the future for manufacturers seeking to deploy autonomous vehicles, and keep our safety mission paramount at every stage.”
DOT is committing to the following milestones in 2016:
Within six months, NHTSA will work with industry and other stakeholders to develop guidance on the safe deployment and operation of autonomous vehicles, providing a common understanding of the performance characteristics necessary for fully autonomous vehicles and the testing and analysis methods needed to assess them.
Within six months, NHTSA will work with state partners, the American Association of Motor Vehicle Administrators, and other stakeholders to develop a model state policy on automated vehicles that offers a path to consistent national policy.
Secretary Foxx encouraged manufacturers to submit rule interpretation requests where appropriate to help enable technology innovation. For example, NHTSA responded to an interpretation request from BMW confirming that the company’s remote self-parking system meets federal safety standards. Click here to read this interpretation.
When interpretation authority is not sufficient, Secretary Foxx further encouraged manufacturers to submit requests for use of the agency’s exemption authority to allow the deployment of fully autonomous vehicles. Exemption authority allows NHTSA to enable the deployment of up to 2,500 vehicles for up to two years if the agency determines that an exemption would ease development of new safety features.
DOT and NHTSA will develop the new tools necessary for this new era of vehicle safety and mobility, and will consider seeking new authorities when they are necessary to ensure that fully autonomous vehicles, including those designed without a human driver in mind, are deployable in large numbers when they are demonstrated to provide an equivalent or higher level of safety than is now available.
In 2015, Secretary Foxx refocused the national dialogue about the future needs of our transportation infrastructure by releasing Beyond Traffic, a report examining the challenges facing America’s infrastructure over the next three decades. This draft framework has already influenced decisions by elected officials, planners and stakeholders nationwide, the DOT said.
In December 2015, the Secretary launched the Smart City Challenge, a national competition to implement bold, data-driven ideas that make transportation safer, easier and more reliable. He also worked to accelerate the DOT’s efforts to incorporate vehicle-to-vehicle (V2V) communication technology into new vehicles.
Wavelet Packet Decomposition (WPD) shows promise as an anti-jamming tool.
The WPD is derived from the wavelet transform, which provides a representation of the signal components in a domain spanned by a set of functions that can be seen as band-pass filters with a bandwidth decreasing as their central frequency increases, thus granting a uniform resolution in the decomposition of the signal under analysis.
A paper by Luciano Musumeci and Fabio Dovis of Politecnico di Torino and James T. Curran of the Joint European Commission’s Research Center, titled “A Comparative Analysis of Adaptive Notch Filtering and Wavelet Mitigation against Jammers Interference,” won the Best Paper in Session award in GNSS Vulnerabilities and Anti-Jamming at the ION-GNSS+ 2015 conference.
The paper compares two interference mitigation techniques at the digital signal processing level for jamming signal removal.
The authors compare the traditional adaptive notch filtering scheme, widely discussed in scientific literature, with a new technique based on the use of the WPD. Both techniques are implemented in software, and their performance has been assessed via the use of a fully software GNSS receiver. Both techniques are first applied to a set of simulated GNSS jammed scenarios.
Preliminary results demonstrate that a significant improvement is achieved at both acquisition and tracking level when the WPD algorithm is employed with respect to the application of the classical adaptive notch filtering. In fact, using the adaptive notch filtering, the effective range of the jamming can be reduced from approximately 474 meters up to 127 meters, while when using the WPD-based algorithm, such a range can be further reduced up to approximately 10 meters. These results are also confirmed by successive test campaigns where performance comparison of both software implemented techniques is assessed considering simulated GNSS data.
The WPD-based technique is characterized by a higher computational complexity with respect to the implementation of notch filtering. This is mainly caused by the several filtering operations needed for the time-scale representation computation. Therefore, the number of decomposition stages and the filter length need to be carefully traded off with the jamming detection and removal capability of such a technique.
However, the availability of a high-performing processor together with a jamming detection based on spectral estimation can potentially lead to a faster WPD computation for future real-time applications.
New speakers have been announced for the Jan. 21 webinar “GNSS Receiver Design: New MEMS Components, Optimal Search Strategies.”
The new speakers are Esther Anyaegbu, a senior systems architect at Intel Mobile Communication (UK), and Matthias Overbeck, group manager of the Precise GNSS Receiver program at the Fraunhofer Institute for Integrated Circuits (Germany).
They join Mark Petovello, professor in the Position, Location And Navigation (PLAN) Group in the Department of Geomatics Engineering, University of Calgary, and Sandy Kennedy, director and chief engineer, core receiver cards, from NovAtel, in making presentations during the webinar. Register free here.
Guest speakers for the Jan. 21 webinar are Mark Petovello, Esther Anyaegbu, Matthias Overbeck and Sandy Kennedy.
Anyaegbu’s subject is Optimal Search Strategies in a Multi-constellation Environment. Traditional methods for satellite search and acquisition have been dominated by methods best suited for GPS. The signal performance analyses using five different GNSS constellations are combined to give an optimal search strategy which exploits the advantages of the signal structures of the different GNSS signals.
Overbeck will present on the GNSS Receiver with Open Software Interface (GOOSE) hardware platform, which provides a development chain from experimental PCIe slot card to an embedded GNSS receiver. The main benefits for potential product developers are an improved development process for GNSS receiver firmware, the possibility to embed application-specific software on the receiver, an access to all potentially relevant data for an improved position solution based on open white-box approach and the enabling of deeply coupled inertial sensors.
Petovello will cover the topic of his January cover story in GPS World magazine (with co-author Bernhard Aumayer), MEMS Oscillators on the Move. Advances in micro-electro-mechanical sensors (MEMS) technology include temperature-sensing MEMS oscillators (TSMO). Pairing a TSMO with a GNSS receiver, the authors successfully performed carrier-phase positioning and obtained accuracies better than typically required for automotive applications. MEMS oscillators can present space and cost advantages in integrated circuit assembly.
They will be joined on the webinar panel by Sandy Kennedy of NovAtel, whose topic will be announced soon. Each speaker will talk for 10–12 minutes, with slides, and there will be a question-and-answer period with the audience to conclude the hour.
The Jan. 21 Receiver Design webinar is sponsored by NovAtel.
The Defense Advanced Research Projects Agency (DARPA) is holding a Proposers Day on Feb. 1 to inform potential contractors about the Atomic Clock with Enhanced Stability (ACES) program.
ACES is a potential $50 million program that seeks to develop battery-powered atomic clocks that work to provide warfighters with synchronization and precision timing capabilities during navigation, communications, electronic warfare and reconnaissance missions in the event of a GPS shutdown.
The registration deadline for the Proposers Day is 5 p.m. EST on Jan. 25. The Proposers Day will be held Feb. 1 from 9:30 a.m. to 5 p.m. EST at the DARPA Conference Center, 675 N. Randolph Street, Arlington, Virginia 22203.
The host is Robert Lutwak, ACES program manager at DARPA. In 2012, GPS World awarded Lutwak its Leadership Award for Products.
The meeting will provide information and promote additional discussion on the ACES program, address questions from potential proposers, and provide an opportunity for potential proposers to share their capabilities and ideas for teaming arrangements.
The ACES Proposers Day will include overview presentations by government personnel, technical presentations by potential proposers and collaborators, and an open poster session to facilitate interaction and teaming.
According to the Department of Defense (DoD), “Precision timing and synchronization is essential to DoD communications, navigation, reconnaissance, and electronic warfare systems. The requirements for timing precision and stability have grown increasingly demanding as DoD systems have evolved towards distributed engagement and surveillance architectures, and this trend is expected to continue for the foreseeable future.
“The ACES program aims to develop portable, battery‐powered atomic clocks with stability, repeatability, and environmental sensitivity approaching that of laboratory‐grade cesium beam frequency standards. This will be accomplished through research, development and integration of reduced SWaP components and technologies for advanced atomic physics interrogation techniques. These include, but are not limited to, laser‐cooled and magneto‐optically trapped atomic samples, and RF‐trapped ion samples, as well as interrogation of less environmentally‐sensitive microwave and optical transitions.”
KVH’s new GEO-FOG 3D inertial navigation system (INS) continuously provides extremely accurate measurements that keep applications operating in challenging conditions. (Image: KVH)
KVH Industries has introduced the GEO-FOG 3D inertial navigation system (INS). The new product offers roll, pitch and heading accuracies of .05 degrees for demanding applications in unmanned, autonomous and manned aerial, ground, marine and subsurface platforms, such as subsea remotely operated vehicles or mining systems.
The GEO-FOG 3D is based on the company’s high-performance fiber optic gyro (FOG) technology combined with centimeter-level precision RTK GNSS receivers and advanced sensor fusion algorithms. The result is a solution that continuously provides fast, ultra-accurate position, velocity and attitude measurements that keep applications operating no matter how challenging the conditions, according to KVH Industries.
The core inertial sensor for the new system is KVH’s 1750 IMU, an inertial measurement unit incorporating three axes of KVH’s DSP-1750 FOG — a high-performance fiber optic gyro — with three axes of advanced accelerometer technology. The 1750 IMU is then fully integrated with a GNSS receiver and a three-axis magnetometer, a barometric pressure sensor and a triple frequency RTK GNSS receiver to deliver reliable, real-time, centimeter-level positioning and orientation measurements.
The system’s sensor fusion algorithms automatically switch from loosely to tightly coupled filtering for improved performance under poor GNSS signal conditions. The system also offers high-speed update rates and rapid north-seeking gyrocompass capabilities for high-accuracy heading in environments when magnetometers and GNSS-aided heading cannot be used.
The GEO-FOG 3D Dual inertial navigation system (INS) is designed for applications that require heading at system startup or in low dynamic conditions. (Image: KVH)
KVH has also introduced a variant, the GEO-FOG 3D Dual, an INS and attitude and heading reference system (AHRS). This product features two GNSS antennas on a fixed RTK baseline that offers the same reliability and performance levels as the GEO-FOG 3D, with increased heading, pitch, and roll accuracy for static and dynamic applications where single antenna systems can be problematic. The GEO-FOG 3D Dual is a superior choice for applications that require heading at system startup or in low dynamic conditions.
“KVH’s GEO-FOG 3D and GEO-FOG 3D Dual provide exceptional accuracy and outstanding performance in a single, small package (less than 1.6 pounds), at price points never previously achieved in the industry,” said Jay Napoli, KVH’s FOG/OEM vice president. “And, because KVH controls the entire design and production process, from creating its own optical fiber to packaging its FOGs together with other sensors for advanced applications, these new products — and all of our open-loop FOGs, IMUs and INSs — offer outstanding accuracy and excellent durability at a lower cost than competing systems.”
Reliable, high-accuracy navigation and control are essential to unmanned, autonomous and manned platforms that must operate in conditions that include magnetic interference and the absence of reliable satellite navigation data. The integrated FOG, GNSS and sensor fusion technologies allow the GEO-FOG 3D and GEO-FOG 3D Dual to achieve performance levels that are beyond typical INS- or MEMS-based solutions.
Both the GEO-FOG 3D and GEO-FOG 3D Dual are designed to support current and future satellite navigation systems including GPS, GLONASS, Galileo and BeiDou. Both systems offer data rates up to 1000 Hz, and the ability to output data over a high-speed RS-422 interface or RS-232 interface, which ensures the systems can be easily and readily integrated in a wide range of platforms.
The UB380 GPS/GLN/BDS tri-constellation octa-frequency high-precision board.
High-end GNSS board
For high-precision positioning, navigation and GBAS applications
The UB380 multi-GNSS receiver has 384 channels, based on Unicore’s multi-GNSS system on a chip. It features Unicore’s latest real-time kinematic (RTK) engine, which can process triple-frequency BDS and GPS and dual-frequency GLONASS observation data. This can significantly reduce initialization time, improve position accuracy and enhance reliability in difficult environments such as city canyon and canopy, as well as make the long baseline RTK possible. The receiver board can support GPS L1, L2 and L5; GLONASS L1, L2; and BDS B1, B2 and B3. The support of GPS L2P and L2C can satisfy the high-precision requirements of GBAS reference station equipment. The UB380 is compatible with industry-standard GNSS boards in size, interfaces and electrical standards.
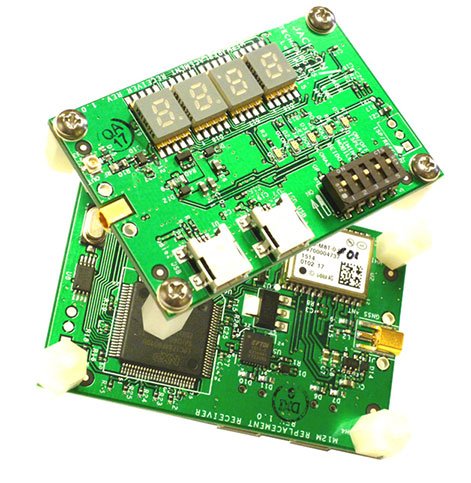
M12M Replacement Receiver GNSS module. Photo: Jackson Labs Technologies
Legacy receiver module
Plug-and-play upgrade for xli server, fury GPSDO
The M12M Replacement Receiver released is form, fit and function compatible to the legacy Motorola M12M and M12+ timing and navigation receivers. It uses an eighth-generation GNSS timing-enabled receiver, allowing 72 GNSS-channel reception with any two GNSS systems being received simultaneously. It adds configurability via USB ports and dual in-line package (DIP) switches and various status displays. GPS, GLONASS, BeiDou, QZSS and SBAS signals can be received. The module supports NMEA, Motorola binary and u-blox binary as well as SCPI (GPIB) communication protocols; is designed to allow plug-and-play retrofit of equipment designed for legacy Motorola receivers; and is certified as a plug-and-play upgrade to the Symmetricom/Microsemi XLI server and the Jackson Labs Technologies Fury GPSDO. It can be used to retrofit products for GLONASS/BeiDou compatibility. The module enhances performance parameters such as time to first fix; position, velocity and timing accuracy; tracking sensitivity; the addition of SBAS (differential compensation) capability; and the addition of external interfaces such as USB and a synthesized frequency output.
High-gain, high-rejection family designed for cell and telecom
The TW3150/52 antennas feature a 50-dB low-noise amplifier (LNA) gain to handle long cable runs often associated with installation on telecommunications towers. They cover the GPS L1 and SBAS (WAAS, EGNOS and MSAS) frequency bands and provide excellent cross-polarization rejection and enhanced multipath rejection.The TW3150 antenna features a four-stage dual-filtered LNA, while the TW3152 antenna includes an additional SAW pre-filter. This provides better than 80-dB of signal rejection above 1610 MHz and below 1545 MHz. The antennas are IP67 and MIL-STD-801F Section 509.4 compliant to withstand challenging environmental conditions.
Provides support for GPS, GLONASS and BeiDou with MediaTek
The ORG1510-MK Multi Micro Hornet is a fully integrated multi-GNSS (GPS, GLONASS and BeiDou) module. The miniature low-power architecture is designed to provide a GNSS component to devices that require fully featured components with small footprints, such as UAVs designed to follow action sports and other fast-moving activities or wearables. The ORG1510-MK contains the MediaTek MT3333 chip, which supports a fast update position calculation rate, and contains an onboard flash memory that does not erase when power is off. It consumes little power with the use of both standby mode and backup mode, and, in advanced applications, a periodic mode that can turn the device on and off when in backup or standby.
Designed for recording sports activities, the FLYPRO XEagle UAV has replaced traditional UAV remote controllers with the XWatch, a smartwatch designed to control the XEagle. Users can control the devices to take off, land and follow, as well as adjust flight height with one click on the wrist within 300 meters. The smartwatch design enables users to fly the aerial vehicles to take high-definition pictures and videos while engaging in intense sports. A voice-control feature allows users to fly the XEagle without moving their hands using commands such as “FLYPRO, take off” and “FLYPRO, follow me”.
Thermal imaging camera core designed for integration
FLIR Tau 2 thermal imaging cameras are suited for demanding applications like UAVs, thermal weapon sights and handheld imagers. Improved electronics now give Tau 2 even more capabilities, including radiometry, increased sensitivity (<30 mK), 640/60 Hz frame rates, and powerful image processing modes that dramatically improve detail and contrast. Since the electrical functions are common between the Tau 2 640, 336 and 324, integrators have direct compatibility between the different camera formats, and Tau camera versions share many of the same lens options.
Amazon’s latest version is designed to deliver packages in 30 minutes
Source: Amazon
A new drone design introduced by Amazon for its planned Prime Air Delivery service is larger than the previous quadcopter and has a more advanced design, including the ability to operate with an auto-loading system that sets the payload inside an internal carrier bay. The hybrid design combines vertical lift and horizontal flight capabilities using lift fans and a pusher prop. The drone is capable of flying at an altitude of about 400 feet (122 meters) at about 55 mph (88 km/h) for a range of 15 miles (24 kilometers). It has sense-and-avoid situational awareness technology and is designed to deliver small packages in under 30 minutes.
The M300 Pro is a multi-purpose CORS GNSS receiver designed for applications such as positioning infrastructure, active geodetic network, deformation monitoring, machine guidance, harbor construction, land surveying and marine surveying. Designed for reference stations, the M300 Pro tracks GPS, GLONASS and BeiDou (B1, B2, B3), and will track Galileo, QZSS and other coming constellations. Its web server function enables remote control for access, configuration, programming, data download, reboot/restart, firmware update and code registration. It is compatible with many kinds of CORS software, using the standard data format RTCM and the various data transfer protocols such as UDP, TCP and NTRIP. Raw GNSS observation data can be saved in RINEX format and remotely downloaded. Multiple ports can be configured and connected with external sensors such as meteorological sensors, barographs and inclinometers. The PPS output function provides a guarantee for precision timing. It also has the functionality of event mark and external memory.
The Leica Velocity and Displacement Autonomous Solution Engine (VADASE) detects fast movements of man-made and natural structures in real time, running on board Leica reference stations and monitoring receivers. VADASE provides an in-depth look at accurate, high-rate velocity and displacement information of various activities and structures. It gives engineers and researchers complete, precise and reliable monitoring information. VADASE delivers actionable information independent of any GNSS real-time kinematic (RTK) correction service.
GNSS receiver with onboard memory for data storage
The DELTA-3 receiver has 864 GNSS channels, along with three powerful processors and program memory in a single chip, which uses less power and makes the total system less expensive. The 864 channels allow tracking of all current and future satellite signals. Delta-3 can track and decode the QZSS LEX signal messages. It is a powerful and reliable receiver for high-precision navigation systems, including high-dynamic systems, for machine and traffic control, high-precision surveying, and geodynamics and aerogeophysics applications. Delta-3 can operate as a receiver for post-processing, as a Continuously Operating Reference Station (CORS), or as a portable base station for real-time kinematic (RTK) applications, and as a scientific station collecting information for special studies such as ionosphere monitoring.
A configuration of ArcGIS and a JavaScript application
Photo Survey is designed for local governments to publish street-level photo collections and conduct focused property surveys that can identify blight, damaged structures or construction activity. It leverages location-enabled photos produced by many commercially available cameras and simplifies data processing so street-level photo collections can be gathered on a regular basis. Photo collections can then be combined with relevant survey questions in an ArcGIS Online map, and shared with the Photo Survey application. Once complete, the Photo Survey application can be used by the general public or local government staff to review street-level photos and complete property surveys.