Complexity and Context: Key Challenges of Multisensor Positioning
By Paul D. Groves, Lei Wang, Debbie Walter, Henry Martin, and Kimon Voutsis, University College London
The next generation of navigation and positioning systems must provide greater accuracy and reliability in a range of challenging environments to meet the needs of a variety of mission-critical applications. No single navigation technology is robust enough to meet these requirements on its own, so a multisensor solution is required. Four key challenges must be met: complexity, context, ambiguity, and environmental data handling.
Although many new navigation and positioning methods have been developed in recent years to address GNSS shortcomings in terms of signal penetration and interference vulnerability, little has been done to bring them together into a robust, reliable, and cost-effective integrated system.
New positioning techniques investigated over the past 15 years include:Wi-Fi; ultra-wideband; phone signals; television and other signals of opportunity; Bluetooth; lasers, and dead reckoning; pedestrian dead reckoning (PDR) using step detection; pedestrian and activity-based map matching; magnetic anomaly matching; and GNSS shadow matching.
There have also been improvements to existing technologies: visual navigation, dead-reckoning algorithms, micro-electro-mechanical systems, inertial sensing with cold-atom technology, nuclear magnetic resonance gyros, distance-measuring equipment, Loran, Doppler with Iridium, multiple GNSS constellations, network assistance, and augmentation by commercial pseudolite systems.
In the next generation, a universal navigation system might be expected to provide position within 3 meters at any location with a very high reliability. No single positioning technology is capable of meeting the most demanding application requirements. Radio signals may or may not be subject to obstruction, attenuation, reflection, jamming, and/or interference. Known environmental features, such as signs, buildings, terrain height variation, and magnetic anomalies, may or may not be available for positioning. The system could be stationary, carried by a pedestrian, or on any type of land, sea, or air vehicle. Furthermore, for many applications, the environment and host behavior are subject to change. A multisensor solution is thus required.
A robust, reliable, and cost-effective integrated system must meet four key challenges:
Complexity. How to find the necessary expertise to integrate a diverse range of technologies, how to combine technologies from different organizations that wish to protect their intellectual property, how to incorporate new technologies and methods without having to redesign the whole system, and how to share development effort over a range of different applications.
Context. How to ensure that the navigation system configuration is optimized for the operating environment and host vehicle (or pedestrian) behavior when both are subject to change.
Ambiguity. How to handle multiple hypotheses, including measurements of non-unique environmental features, pattern-matching fixes where the measurements match the database at multiple locations, and uncertain signal properties, such as whether reception is direct or non-line-of-sight (NLOS).
Environmental Data Handling. How to gather, distribute, and store the information needed to identify signals and environmental features and define their points of origin or spatial variation.
Complexity
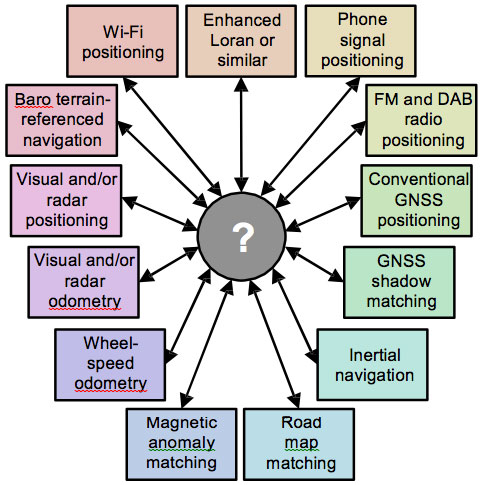
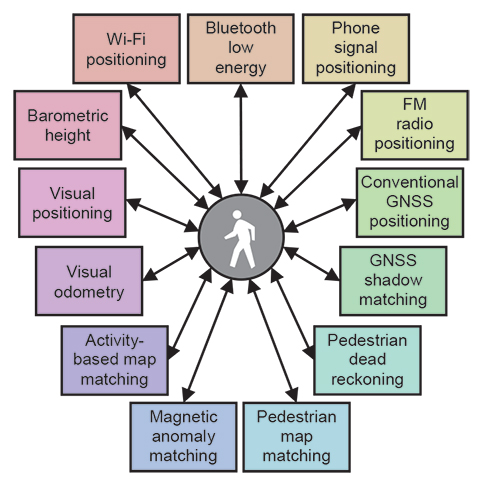
Achieving robust positioning in challenging environments potentially requires a large number of subsystems. For example, Figure 1 shows the possible components of a pedestrian navigation system using sensors found in a typical smartphone. Figure 2 shows possible components of a car navigation system using equipment already common on cars and other suitable low-cost sensors. Some technologies are common to the two platforms, while others differ.

Any multisensor navigation or positioning system needs integration algorithms to obtain the best overall position solution from the constituent subsystems. These algorithms must not only input and combine measurements from a wide range of subsystems, but also calibrate systematic errors in those subsystems. Designing the integration algorithms therefore requires expertise in all of the subsystems, which can be difficult to establish in a single organization. The more subsystems there are, the more of a problem this is.
The expert knowledge problem is compounded by the fact that different modules in an integrated navigation system are often supplied by different organizations, who may be reluctant to share necessary design information if this is considered to be intellectual property that must be protected. In a typical smartphone, one company supplies the GNSS chip, another supplies the Wi-Fi positioning service, a third organization supplies the mapping, the network operator provides the phone-signal positioning, a fifth company provides the inertial and magnetic sensors, and a sixth company produces the operating system. Because of lack of cooperation between these different organizations, useful information gets lost. For example, GNSS pseudo-range measurements are not normally available to application developers.
A further issue is reconfigurability. To minimize development costs, manufacturers share algorithms and software across different products, incorporating different subsystems. They also want to minimize the cost of adding new sensors to a product to improve performance. Similarly, researchers want to compare different combinations of subsystems. However, with a conventional system architecture, modifications must be made throughout the integration algorithm each time a subsystem is added, removed, or replaced. The more subsystems there are, the more complex this task becomes.
For a given application, different subsystems may also be used at different times. For example, a smartphone may use Wi-Fi positioning indoors and GNSS outdoors and may deploy different motion constraints and map matching algorithms, depending on whether the device is carried by a pedestrian or traveling in a car. Different integration algorithms for different configurations are more processor efficient, but also require more development effort. Conversely, an all-subsystem integration algorithm is quicker to develop, but can waste processing resources handling inactive subsystems.
Modular Integration. The solution to these problems is a modular integration architecture, consisting of a universal integration filter module and a set of configuration modules, one for each subsystem. The integration filter module would be designed by data fusion experts without the need for detailed knowledge of the subsystems. It would accept a number of generic measurement types, such as position fixes and pseudo-ranges, with associated metadata. The configuration modules would be developed by the subsystem suppliers and would convert the subsystem measurements into a format understood by the filter module and supply the metadata. They would also mediate the feedback of information from the integration filter to the subsystems. The metadata comprises the additional information required to integrate the measurements such as
- the measurement type and any coordinate frame(s) used.
- a sensor identification number (to distinguish measurements of the same type from different sensors).
- statistical properties of the random and systematic measurement errors.
- identification numbers and locations of transmitters and other landmarks.
A key advantage of this approach is that subsystems may be changed without the need to modify the integration filter. Provided the new subsystem is compatible, all that is needed is the corresponding configuration module.
Figure 3 shows an example of a modular integration architecture for a combination of conventional GNSS positioning, GNSS shadow matching, Wi-Fi positioning, and PDR. As well as providing measurements and associated statistical data to the integration filter module, the configuration modules feedback relevant information to the subsystems. Shadow matching works by comparing measured and predicted signal availability over a number of candidate positions, so requires a search area to be specified using other positioning technologies. PDR uses information from other sensors, where available, to calibrate the coefficients of its step length estimation model and correct for heading drift. Conventional GNSS positioning can also benefit from position and velocity aiding to support acquisition and tracking of weak signals in indoor and urban environments.
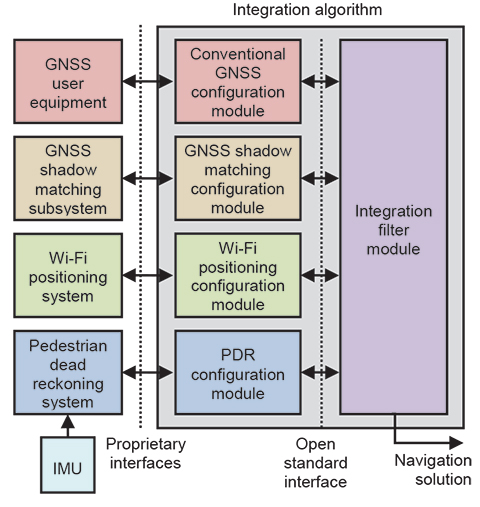
In principle, each subsystem configuration module could simply supply a position fix to the integration filter module with an associated error covariance. However, other forms of measurement generally give better results. For conventional GNSS positioning, the advantages of tightly coupled (range- domain) integration over loosely coupled (position-domain) are well known.
PDR is a dead-reckoning technique, so measures distance traveled rather than position. Consequently, providing measurements of position displacement and direction can avoid cumulative errors in the measurement stream.
GNSS shadow matching and some types of Wi-Fi positioning use the pattern-matching positioning method. This scores an array of candidate position solutions according to the match between the measured and predicted signal availability or signal strength. Although the output of these algorithms is in the position domain, a likelihood distribution can provide more information for the integration filter than a simple mean and covariance.
Other navigation and positioning techniques generate further types of measurement, including velocity, attitude, specific force, angular rate, range rate, and bearings and elevations of features. The types of measurement depend on the positioning method.
A universal integration filter must operate without prior knowledge of which measurements it must process and which states it must estimate. Consequently, it must reconfigure its measurement vector, state vector, and associated matrices according to the measurements available, using the metadata supplied by the configuration module. This capability is sometimes called “plug and play,” and a number of prototypes have been developed by different research groups.
The integration filter must be capable of implementing either error-state or total-state integration, depending on the measurements available. In error-state integration, one of the subsystems, such as inertial navigation, provides a reference navigation solution. The integration filter estimates corrections to that solution using the measurements from other subsystems. In total-state integration, the integration filter estimates the position and velocity directly, and an additional configuration module provides information on the host vehicle (or pedestrian) dynamics.
Modular integration algorithms could form part of a wider modular integrated navigation concept in which subsystem hardware and software is shared across a range of applications.
Issues to Resolve
A critical requirement for the successful implementation of modular integration is an open-standard interface for communication between the universal filter and configuration modules. This enables modules produced by different organizations to work together. To realize the full benefits of modular integration, in terms of interoperability and software re-use, there should be a single standard covering the consumer, professional, research, and military user communities and spanning all of the application domains air, sea, land, indoor, underwater, and so forth. A standard developed by one group in isolation is unlikely to meet the needs of the whole navigation and positioning community, while the development of multiple competing standards defeats the main purpose of modular integration.
This interface should be defined in terms of fundamental measurement types, such as position, velocity, and the ranges, bearings, and elevations of signals and features. However, there are many different coordinate systems that may be used and positioning may be in 2 or 3 dimensions, while ranging measurements may be true ranges or pseudoranges. Ranging and angular positioning measurements may be differenced across transmitters or landmarks, differenced across receivers or sensors, or double differenced across both.
A universal interface must support every measurement type that requires different processing by the filter module. However, it need not support formats that are easily convertible. Thus, there is no need to support both the north, east, down, and east, north, up conventions. There are two main approaches to defining the fundamental measurement types:
- A minimal number of very generic measurement types with metadata used to describe how these should be processed by the integration filter.
- A large number of more specific measurement types for which the processing methodology is already known.
For each measurement type, an error specification must be defined. For error sources assumed to be white, a standard deviation or power spectral density (PSD) is required. For correlated errors, such as biases, information on the time correlation is required alongside variances and covariance information. The interface standard should include every conceivable error source. Unused errors can simply be zeroed. The filter module should then use the error specification to determine which error sources to model and how.
Obtaining reliable navigation sensor error specifications can be difficult. Manufacturers often provide only limited information, while performance in the field can be different from that in the laboratory due to vibration and electromagnetic interference. For new positioning techniques, the error behavior may not be fully understood, while complex error behavior can be difficult to measure. Adaptive estimation techniques provide only a partial solution. Even where the error behavior is well known, it can be too complex to practically model within the estimation algorithm. This could represent a fifth challenge.
For subsystems used as the reference in an error-state integration filter, such as an inertial navigation system (INS), the errors will typically be correlated across the different components of the subsystem navigation solution, for example position, velocity, and attitude. Furthermore, to represent the error behavior within an integration algorithm, it is necessary to model the error properties of the underlying sensors, accelerometers and gyroscopes in the case of inertial navigation. Thus, it is likely that additional compound measurement types for reference system data will be needed.
For pseudorange measurements, an issue to consider is the synchronization of different transmitter and receiver clocks. Clocks in receivers for different types of signal, such as GNSS and Loran, may or may not be synchronized with each other. Also, the transmitter clocks are typically synchronized in groups. For example, the GPS satellite clocks are synchronized with each other, as are the GLONASS satellite clocks, but GLONASS is not currently synchronized with GPS. For optimal integration of pseudoranges from different sources, this information must be conveyed to the integration filter.
The interface standard for communication between the filter and configuration modules must also support feedback of information from the integration filter to the subsystems, via the configuration modules. The integrated position, velocity, and attitude solution, with its associated error covariance, is useful for aiding many different subsystems. Therefore, a generic standard for this should be defined. Conversely, the feedback to the subsystems of calibration parameters estimated by the integration algorithm is sensor specific, so should be incorporated in the definitions of the fundamental measurement types.
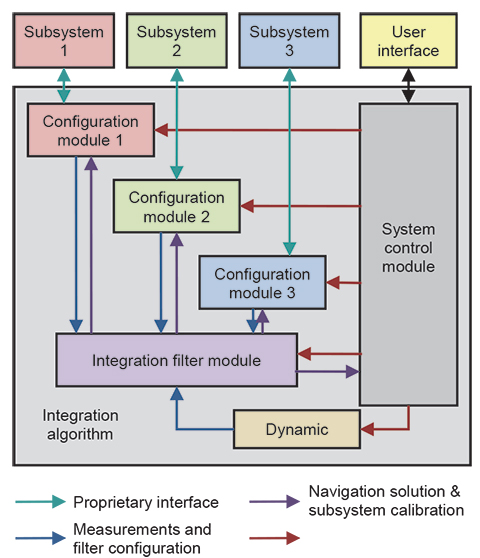
The user requirements, such as accuracy, integrity, continuity, solution availability, update rate, and power consumption, can vary greatly between applications. For example, accuracy is important for surveying, integrity for civil aviation, solution availability for many military applications, and power consumption for many consumer applications. This impacts the design of the whole navigation system. Different modules could be used for different applications. However, it is more efficient if the components adapt to different environments. Figure 4 shows how requirements information can be disseminated in a modular integrated navigation system.
An open-standard interface specification should be able to handle any conceivable navigation and positioning system. However, it is more efficient if the components adapt to different environments. Similarly, there will be differences in the error magnitudes that an integration filter can handle and in its capability to handle non-Gaussian error distributions. Variations in fault detection and integrity monitoring capability can also be expected. Consequently, there must be a capability specification for each filter module and a protocol for handling mismatches between the measurements and the filter module, and a means to certify that a filter module actually has the claimed capabilities. (Further discussion of modular integration may be found in our IEEE/ION PLANS 2014 paper, “The Four Key Challenges of Advanced Multisensor Navigation and Positioning,” and the Journal of Navigation paper, “The Complexity Problem in Future Multisensor Navigation and Positioning Systems: A Modular Solution.”)
Context
Context is the environment that a navigation system operates in and the behavior of its host vehicle or user. Examples include a pedestrian walking (behavior) in an urban street (environment), a car driving at highway speeds on an open road, and an airliner flying high above an ocean.
Context is critical to the operation of a navigation or positioning system. The environment affects the types of signals available. For example, GNSS reception is poor indoors while Wi-Fi is not widely available outside towns and cities. In underwater environments, most radio signals cannot propagate so acoustic signals are used instead. Processing techniques can also be context dependent. For example, in open environments, non-line-of-sight (NLOS) reception of GNSS signals or multipath interference may be detected using consistency checking techniques based on sequential elimination. However, in dense urban areas, more sophisticated algorithms are required and may be enhanced using 3D city models. GNSS shadow matching only works in outdoor urban environments.
Navigation using environmental feature matching is inherently context-dependent as different types of feature are available in different environments. Suitable algorithms, databases, and sensors must be selected. For example, terrain referenced navigation (TRN) uses radar or laser scanning in the air, sonar or echo sounding at sea, and barometric pressure on land. Map matching requires different approaches for cars, trains, and pedestrians. Similarly, algorithms and databases for image-based navigation depend on the types of feature available, which vary with the environment.
Behavioral context is also important and can contribute additional information to the navigation solution. For example, cars normally remain on the road, effectively removing one dimension from the position solution. Their wheels also impose constraints on the way they can move, reducing the number of inertial sensors required to measure their motion. Similarly, PDR using step detection depends inherently on the characteristics of human walking. Using PDR for vehicle navigation or vehicle motion constraints for pedestrian navigation will produce errors.
Host vehicle behavior is also important for tuning the dynamic model within a total-state navigation filter and for detecting faults through discrepancies between measured and expected behavior. Within a GNSS receiver, the behavior can be used to set tracking loop bandwidths and coherent correlator accumulation intervals, and to predict the temporal variation of multipath errors. The antenna placement on a vehicle or person can also affect performance.
Historically, context was implicit; a navigation system was designed to be used in a particular type of vehicle, handling its associated behavior and environments. However, many navigation systems now need to operate in a variety of different contexts. For example, a smartphone moves between indoor and outdoor environments and can be stationary, on a pedestrian, or in a vehicle. Similarly, a small surveillance drone may operate from above, amongst buildings, or even indoors. At the same time, most of the new positioning techniques developed to enable navigation in challenging environments, are context-dependent. To make use of these techniques in practical applications (as opposed to research demonstrators), it is necessary to know the context.
Context-Adaptive Navigation
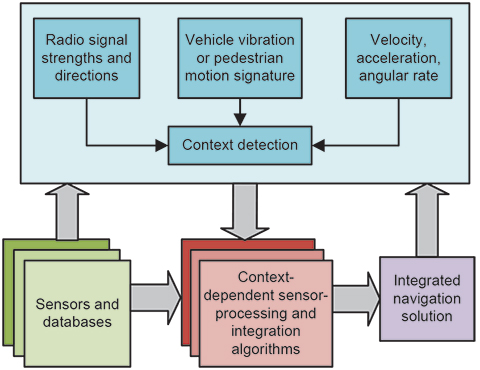
The solution to the problem of using context-dependent navigation techniques in variable-context applications is context-adaptive navigation. As shown in Figure 5, the navigation system detects the current environmental and behavioral context and, in real time, reconfigures its algorithms accordingly. For example, different radio positioning signals and techniques may be selected, inertial sensor data may be processed in different ways, different map-matching algorithms may be selected, and the tuning of the integration algorithms may be varied.
Previous work on context-adaptive navigation and positioning focused on individual subsystems and concerned either behavioral or environmental context, not both.
For example, there has been substantial research into classifying pedestrian motion using inertial sensors to enable PDR algorithms using step detection to estimate the distance travelled from the detected motion. The context information may also be used for non-navigation purposes.
Typically, orientation-independent signals are generated from the accelerometer and gyro outputs. Statistics such as the mean, standard deviation, root mean squared (RMS), inter-quartile range, mean absolute deviation, maximum−minimum, maximum magnitude, number of zero crossings, and number of mean crossings are then determined from a few seconds of data. Frequency-domain statistics may also be used. Finally, a pattern recognition algorithm is used to match these parameters to the stored characteristics of different combinations of activity types and sensor locations.
Detection of road-induced vibration using accelerometers has been used to determine whether or not a land vehicle is stationary, while a calibrated yaw-axis gyro can be used to determine when a vehicle is travelling in a straight line. Indoor and outdoor environments may be distinguished using GNSS carrier-power-to-noise-density ratio (C/N0 ) measurements. Wi-Fi signals might also be used for environmental context detection.
Context Detection Experiments
We have conducted a number of different context-detection experiments using GNSS, Wi-Fi, and accelerometers. Full details are presented in our ION GNSS+ 2013 paper, “Context Detection, Categorization and Connectivity for Advanced Adaptive Integrated Navigation,” and in our PLANS 2014 paper. Here, some highlights from the results are presented.
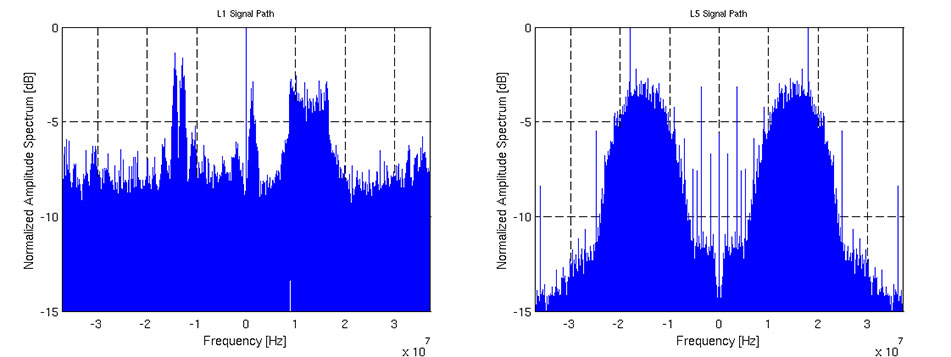
GNSS. GNSS data was collected at five locations inside and immediately outside UCL’s Grant Museum of Zoology; these are shown in Figure 6. C/N0 measurement data was collected from all GPS and GLONASS signals received by a Samsung Galaxy S3 Android smartphone. About 60 seconds of data was collected at each site. Figure 7 presents histograms of the C/N0 measurements and Table 1 lists the means and standard deviations.
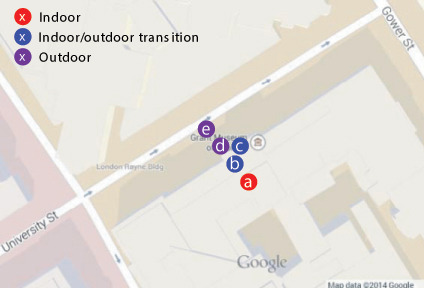
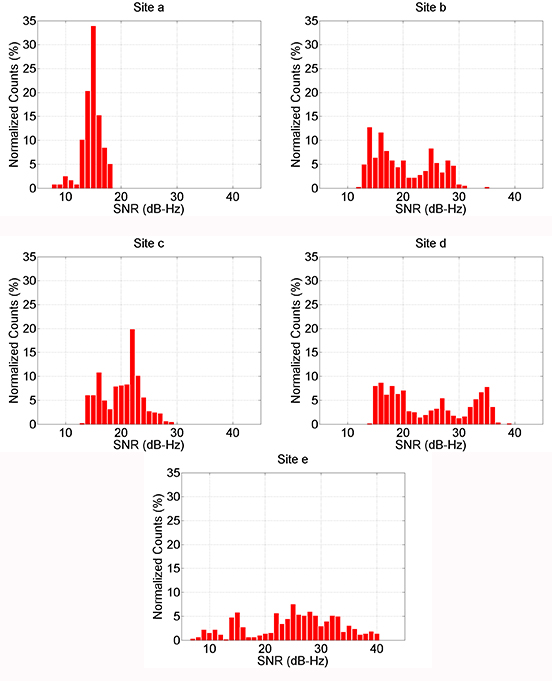
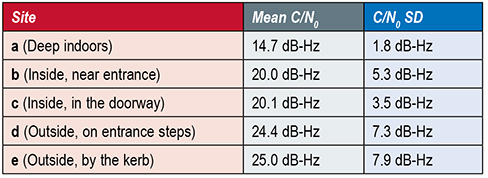
As expected, the average received C/N0 is lower indoors than outdoors and lower deep indoors than near the entrance. Furthermore, the standard deviation of the C/N0 measurements is larger outdoors than indoors and also larger near the entrance to the building than deep indoors. Thus, both the mean and the standard deviation of the measured C/N0 across all GNSS satellites tracked are useful both for detecting indoor and outdoor contexts and for distinguishing between different types of indoor environment.
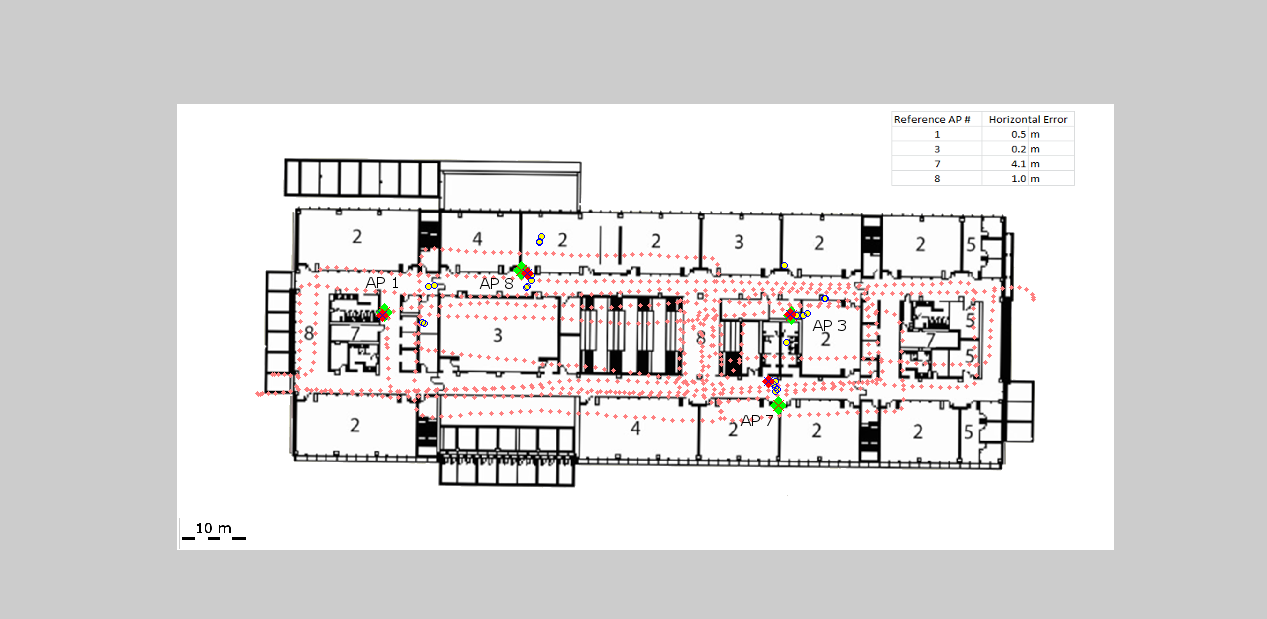
Indoor/Outdoor Detection, Wi-Fi. Tests in and around several UCL buildings have shown no clear relationship between Wi-Fi SNRs and environmental context. However, as the environment changes, there is a rapid change in the Wi-Fi SNRs over a few epochs. For a user moving from inside to outside of a particular building, those signals which originate inside go from strong to weak, while many of those from neighboring buildings become stronger. Consequently, Wi-Fi signals could potentially be used to detect context changes instead of the absolute context. This is useful for improving the overall robustness of context determination.
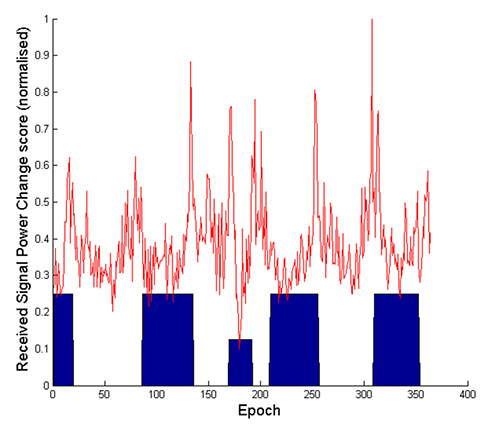
To test this, Wi-Fi data was collected using a Samsung Galaxy S3 smartphone along a route with both indoor and outdoor sections and a context-change score calculated from the last six epochs of data at 1-second intervals.
Context-change score results are presented in Figure 8. The large blue blocks indicate when the user was outside and the smaller blue block shows when the user was in the building’s basement, a very different Wi-Fi environment. As can be seen, there are clear peaks in the “context change” score whenever the user moves between indoor and outdoor contexts.
However, there are also peaks when the user enters and leaves the basement, so the technique is sensitive to false positives and must be combined with other context detection techniques to be used reliably.
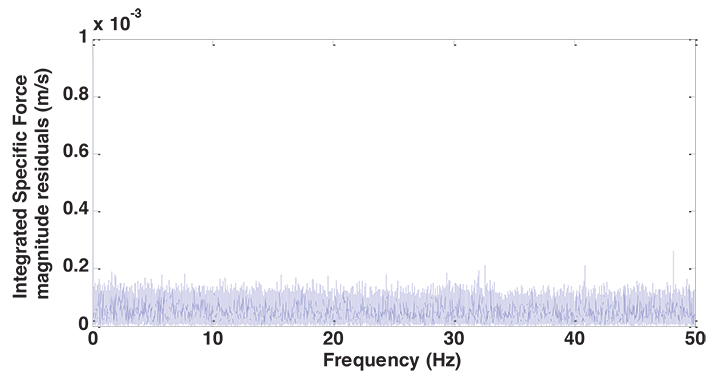
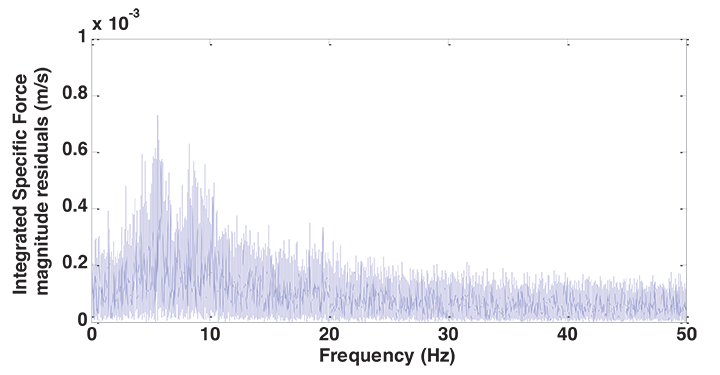
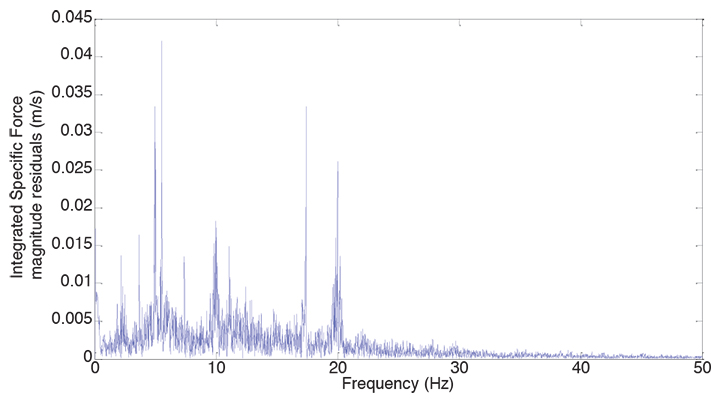
Behavioral Detection, Accelerometers. The use of accelerometers to detect behavioral context is well established. However, by looking at the vibration spectra, more information can be extracted. For these experiments, specific force data was collected using an Xsens MTi-G IMU/GNSS device, the mean subtracted to remove most of the gravity, and a discrete Fourier transform obtained using the MATLAB function fft. Figures 9 and 10 respectively show the vibration spectra of the specific force magnitude for an IMU on a table and held by a stationary pedestrian. The table spectrum is approximately white, whereas the pedestrian data shows peaks between 6 and 10 Hz.
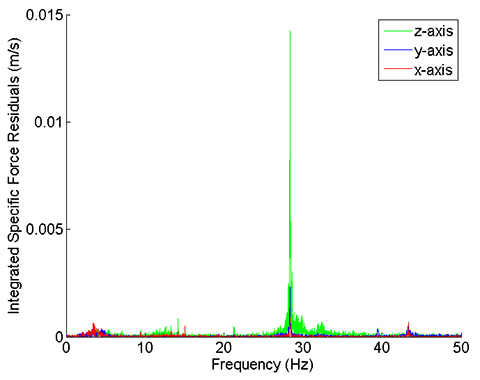
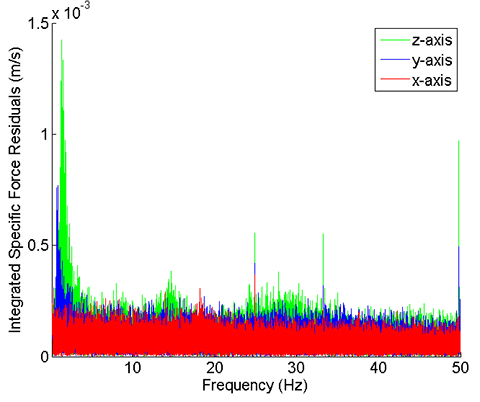
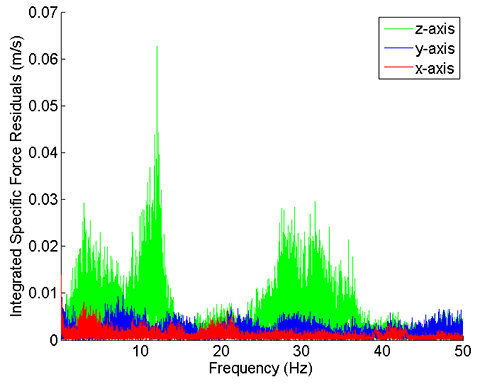
Figures 11 and 12 respectively show the vibration spectra of a stationary Vauxhall Insignia car, and a stationary urban electric train. Here, the individual accelerometer spectra are shown. In each case, the x-axis was pointing forward, the y-axis to the right and the z-axis down. The car exhibits a lot of vibration at frequencies above 10 Hz due to its engine, whereas the dominant train vibration peak is around 1.5 Hz, with smaller peaks at 15 Hz, 25 Hz, 33 Hz, and 50 Hz, the mains power frequency. Thus, the two vehicles are very different from each other and also from the pedestrian. Figure 13 then shows the vibration spectrum of the car moving on a high-speed road. As might be expected, there is much more vibration when moving with broad peaks below 15 Hz due to road vibration and above 15 Hz due to engine vibration.
Finally, Figure 14 shows the vibration spectra on an escalator at an underground rail station. The IMU was in the trouser pocket of a pedestrian. Vibration at a range of frequencies below 30 Hz can be seen and it was observed that the resonant frequencies vary between individual escalators.
Issues to Resolve
Despite the work done with individual sensors, a multisensor integrated navigation system that adapts to both environmental and behavioral context remains at the concept stage. Realizing this in a practical system requires both effective context determination and a set of context categories standardized across the whole navigation and positioning community.
The first step in the standardization process is to establish a framework suitable for navigation and positioning. Each context category must map to a configuration of the navigation system; otherwise, it serves no purpose. Multiple categories may map to the same configuration as different navigation systems will respond to different context information. In an autonomous context-adaptive navigation system, the context categories must also be distinguishable from each other.
Figure 15 shows the relationships in a five-attribute framework, comprising environment class, environment type, behavior class, vehicle type, and activity type. The environmental and behavioral contexts are treated separately because they perform fundamentally different roles in navigation. Environmental context concerns the availability of signals and other features that may be used for determining position whereas behavioral context is concerned with motion.
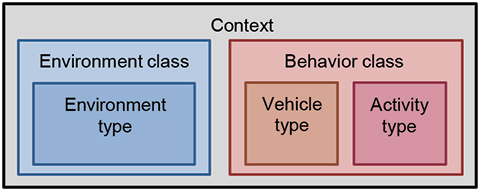
Context may be considered at different levels. Sometimes it is sufficient to consider broad classes such as indoor or aircraft. In other cases, more detail is needed, specifying the type of indoor environment or the type of aircraft. Therefore, a two-level categorization framework, comprising class and type is proposed. The behavioral context comprises the vehicle type and the activity undertaken by that vehicle. A common set of classes containing separate vehicle and activity types is thus proposed. For pedestrian navigation, different parts of the body move quite differently, so the sensor location on the body is analogous to the vehicle type.
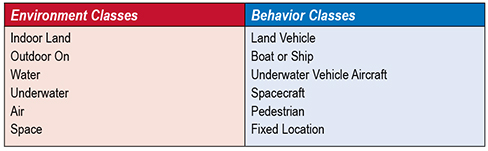
The broad classes of environmental and behavioral context are relatively obvious. We therefore propose that the community adopts the classes in Table 2. Standardization at the type level requires further research to determine:
- which context categories a navigation system needs to distinguish between in order to optimally configure itself;
- which context categories may be distinguished reliably by context detection and determination algorithms.
Effective Context Determination. The reliability of current context detection techniques is typically 90−99%, with some context categories easier to detect than others. For the purposes of controlling a navigation system, this is relatively poor. Furthermore, context detection research projects have typically considered a much smaller range of context categories than a practical context-adaptive navigation system would need. Generally, the more categories there are, the harder it is to distinguish between them.
To make context determination reliable enough for context- adaptive navigation to be practical, a new approach is needed. Firstly, the context should be detected using as much information as possible, maximizing both the range of sensors used and the number of parameters derived from each sensor.
Environmental context detection experiments have largely focused on GNSS and Wi-Fi signals. Other types of radio signal; environmental features detected using cameras, laser scanners, radar, or sonar; ambient light; sounds; odors; magnetic anomalies, and air pressure could all be used. Context may also be inferred by comparing the position solution with a map, provided both are sufficiently accurate.
Behavioral context detection experiments have generally used inertial sensors. As shown earlier, this could be taken further by analyzing different frequency bands and, where possible, separating the forward, transverse, and vertical components. Other motion sensing techniques, such as visual odometry and wheel-speed odometry could be used. Context information, such as vehicle type, can also be determined from the velocity, attitude, and acceleration solutions.
Considering every combination of environment type, vehicle type (or pedestrian sensor location), and activity type produces potentially tens of thousands of different context categories — too many to practically distinguish using context detection techniques alone. However, the number of context categories that must be considered may be reduced substantially by using association, scope, and connectivity information, making the determination process much more reliable.
Association is the connection between the different attributes of context. Certain activities are associated with certain vehicle types and certain behaviors are associated with certain environments; an airliner flies, while a train does not, and flying takes place in the air, not at the bottom of the sea.
For a particular application, the scope defines each context category to be required, unsupported, or forbidden. This enables forbidden context categories to be eliminated from the context determination process and required categories to be treated as more likely than unsupported categories.
Connectivity describes the relationship between context categories. If a direct transition between two categories can occur, they are connected. Otherwise, they are not. Thus, stationary vehicle behavior is connected to pedestrian behavior, whereas moving vehicle behavior is not because a vehicle must normally stop to enable a person to get in or out. Context connectivity is directly analogous to the road link connectivity used in map matching and a similar mathematical formulation may be used. In practice, it is best to represent the connectivity as continuously valued transition probabilities rather than in Boolean terms. This facilitates recovery from incorrect context determination and enables rare transitions between context categories to be represented.
Location-dependent connectivity takes the concept a stage further by considering that many transitions between context categories happen at specific places. For example, people normally board and leave trains at stations and fixed-wing aircraft typically require an airstrip to take off and land. Thus context transition probabilities may be modeled as functions of the position solution, provided the positioning and mapping error distributions are adequately modeled and the probability of transitions occurring at unusual locations is considered.
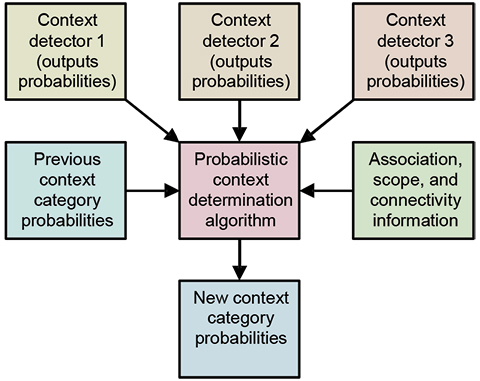
Finally, for maximum robustness, the whole context determination process should be probabilistic, not discrete. The system should maintain a list of possible context category hypotheses, each with an associated probability. Multiple context detection algorithms should be used, each based on different sensor information. The detection algorithms should also output multiple context category hypotheses with associated probabilities. The context determination algorithm should then produce a new list of context category hypotheses and their probabilities by combining:
- the previous list of hypotheses and their probabilities;
- the hypotheses and probabilities output by the context detection algorithms;
- context association, scope, and connectivity information.
Figure 16 illustrates the concept. When there is insufficient information to determine a clear context category, the list of context hypotheses and their probabilities will be output to the navigation algorithms. The handling of ambiguous information in navigation systems is discussed in Part 2.
Context Adaptivity and Integration
The practical implementation of a complex multisensor navigation system for a multi-context application requires context-adaptive navigation to be incorporated into a modular multisensor integration architecture as described earlier. To enable different modules to adapt to changes in context, the architecture shown in Figure 4 should be extended to supply context information to the configuration modules, integration filter, and dynamic model from the system control module, alongside the user requirements. The configuration modules can then pass the context information onto the subsystems where necessary. Standardization of context categories and definitions across the navigation and positioning community is essential for this. Distribution of context information is useful even for single-context applications as it enables suppliers to provide modules that are optimized for multiple contexts.
The modular integration architecture must also support the context detection and determination process, allowing all subsystems to contribute. The configuration modules should therefore provide context detection information to a context determination module, as shown in Figure 17. The scope information should be supplied by the system control module.
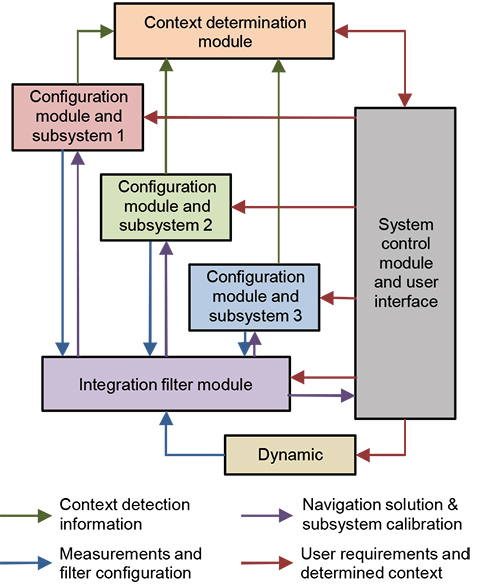
Potential architectures for this are discussed in our PLANS 2014 paper.
Ambiguity and Environmental Data
Part 2 of this article, appearing in the November issue, explores the two remaining key challenges and forms conclusions and recommendations.
Paul Groves is a lecturer at University College London (UCL), where he leads a program of research into robust positioning and navigation. He is an author of more than 50 technical publications, including the book Principles of GNSS, Inertial and Multi-Sensor Integrated Navigation Systems, now in its second edition. He is a Fellow of the Royal Institute of Navigation and holds a doctorate in physics from the University of Oxford.
Lei Wang is a Ph.D. student at UCL. He received a bachelor’s degree in geodesy and geomatics from Wuhan University. He is interested in GNSS-based positioning techniques for urban canyons.
Debbie Walter is a Ph.D. student at UCL. She is interested in navigation techniques not reliant on GNSS, multi-sensor integration and robust navigation. She has an MSci from Imperial College London in physics and has worked as an IT software testing manager.
Henry Martin is a Ph.D. student at UCL. His project is concerned with improving navigation performance from a low-cost MEMS IMU. He is interested in inertial navigation, IMU error modelling, multi-sensor integration and calibration algorithms. He holds a master of mathematics degree from Trinity College at the University of Oxford and an MSc in advanced mechanical engineering from Cranfield University.
Kimon Voutsis is a Ph.D. student at UCL. He is interested in pedestrian routing models, human biomechanics, and positioning sensor performance under high accelerations, particularly IMUs and GNSS. He holds an MSc in geographic information science (UCL). His Ph.D. project investigates the effects of pedestrian motion on positioning.
All authors are members of UCL Engineering’s Space Geodesy and Navigation Laboratory (SGNL).