GNSS receivers face the same old challenges (extremely weak received signal, orbit and satellite clock errors, ionospheric and tropospheric delays, multipath, dilution of precision, urban canyons, etc.) and new ones (increased interference). However, compared with just a few years ago, they benefit from new signals, many more satellites, a panoply of options for corrections, and improved integration with inertial navigation systems (INS).
For example, pole-tilt compensation is quickly becoming standard. This feature enables users to locate dangerous or hard-to-reach points by measuring them at an angle with just the tip of the pole to which the receiver is attached.
Pole-tilt compensation also makes surveying and mapping easier by removing, in many situations, the need to use total stations or offsets. Together with improvements in work processes, this makes GNSS receivers more user friendly. This is particularly welcome now that more surveyors are retiring than there are new surveyors entering the profession.
The greater accuracy of GNSS receivers enabled by the increase in the number and quality of satellites, signals, corrections services and integration of GNSS with other sensors is also increasing the number of use cases, especially at the high end of the accuracy requirements, such as lane-level vehicle navigation. (Next month’s cover story will center on this year’s Google Smartphone Decimeter Challenge contest, in which competing teams aim to bring smartphone location down to the decimeter or even centimeter resolution using raw location measurements from Android smartphones. This could enable services that require lane-level accuracy, such as estimated time of arrival when using a high-occupancy vehicle lane.)
This month’s cover story highlights what has changed “inside the box” to improve the accuracy and resilience of GNSS receivers for surveying, mapping and a variety of other applications. Read the success stories from five different companies below.
An interview with Markus Uster, head of product center positioning at u-blox about recent GNSS receiver innovations.
Uster
What was the most significant technical innovation in your GNSS receivers in the past five years?
The u-blox F9, launched in 2018, is our robust and versatile high-precision positioning technology platform. It was the first receiver to enable multi-band high-precision positioning solutions for mass-market industrial and automotive applications — and remains the benchmark for the industry today.
The platform combines multi-constellation (continuous reception of four satellite constellations) GNSS technology with dead reckoning and high-precision algorithms. It is also compatible with a variety of GNSS correction data services to achieve positioning accuracy down to the centimeter level.
The u-blox F9 platform is leading the next generation of high-precision navigation with its augmented reality, unmanned vehicles and various machine automation applications. It has since been integrated into a selection of modules catering to a wide range of applications.
What has it enabled users to do that they could not do before?
The u-blox F9 is a widely adopted multi-band GNSS platform for automotive and industrial applications. (Photo: u-blox)
In a nutshell, the u-blox F9 brought high-precision positioning to the mass market. The demand for scalable high-precision technology is growing rapidly, as evident in the automotive world with next-generation advanced driver-assistance systems (ADAS) and in robotics with applications such as UAVs and robotic lawnmowers. However, due to the complexity, size, power and cost restrictions of existing high-precision solutions, until now it has been difficult to meet the demands of these markets.
u-blox developed the u-blox F9 platform by building on the success of our NEO-M8P high-precision GNSS module series and drawing on our extensive experience in GNSS positioning technologies, including dead reckoning, multi-band, real-time kinematic (RTK) and GNSS correction services. The platform delivers the next level of scalable GNSS high-precision technology and shows how u-blox is consistently addressing challenges and driving the GNSS technology evolution.
What is a good example of this?
Integration of the u-blox F9 platform into various applications has proven quite successful in a diverse range of use cases. In the industrial realm, u-blox F9 technology enables mass adoption of commercial unmanned vehicle applications. One example is precision agriculture, where high-precision positioning cost-effectively enables vehicle guidance solutions to improve pass-to-pass accuracy resulting in improved crop yield and reduced consumption of pesticides, fertilizer and seeds. The u-blox F9 modules also paved the way for autonomous driving, including lane-level navigation for heads-up displays and vehicular infotainment systems, a prerequisite for highly automated and fully autonomous vehicles.
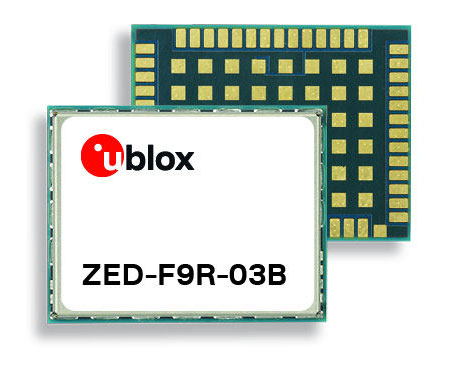
U-blox has released a new firmware update for its ZED-F9R high-precision GNSS dead-reckoning modules. The update extends the range of supported positioning augmentation services.
With the update, the u-blox ZED-F9R-03B adds support for Japan’s QZSS CLAS correction services, extending the geographical market reach of the ZED-F9R and increasing the scalability of applications using the module. It also now supports SPARTN 2.0, a service from u-blox that delivers correction data based on the SPARTN protocol.
The ZED-F9R module was designed for use in autonomous automotive and industrial applications that require simple and efficient implementation. It is used where rapid access to highly accurate positioning data is key, even in challenging signal environments such as dense cities. Typical applications include slow-moving use cases such as robotic lawnmowers and shared e-scooters.
The module has an integrated inertial measurement unit (IMU) for real-time kinematic (RTK) positioning. It employs sophisticated algorithms to fuse the IMU data with GNSS measurements, wheel ticks, correction service data, and a vehicle dynamics model to provide centimeter-level positioning accuracy even in situations where GNSS alone would fail. It is based on the u-blox F9 multi-band GNSS receiver platform, which concurrently tracks up to four GNSS constellations, providing high-quality positioning accuracy.
Experts at u-blox discuss how they’re creating a hybrid positioning system for automated vehicles using GNSS and terrestrial radio ranging
By David Bartlett, senior principal engineer, Product Center Positioning, and Stefania Sesia, head of Application Marketing, Automotive, u-blox
There’s so much discussion around automated vehicles in the mainstream press these days, that it’s easy to forget some of the critical enabling technology needs to mature significantly before large numbers of people are being whisked from A to B by completely driverless cars.
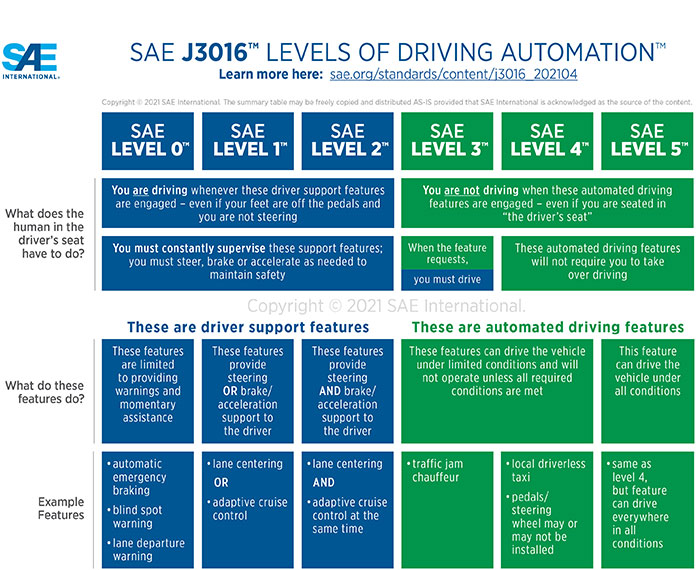
An area demanding particular attention is high-precision positioning. The Society of Automotive Engineers published a six-level automation scale. For vehicles at the higher end of the scale to become reality, they need to be able to reliably pinpoint their location to within centimeters, at all times.
Society of Automotive Engineers’ six-level automation scale. (Image: SAE International)
The positioning systems in most modern cars — which typically use GNSS receivers coupled with an inertial measurement unit (IMU) and the odometer — can’t get close to this level of accuracy. Even in the most favorable conditions for GNSS satellite signal reception, accuracy is between 2 and 5 meters horizontal circular error probable (CEP) without a correction service. In more challenging environments, such as urban areas or indoors, this is significantly reduced.
Using UWB and V2X to complement GNSS
Various solutions are being developed to address this GNSS shortcoming, but all currently have their limitations or don’t offer a solution that’s workable in all environments. Future autonomous vehicles will therefore invariably need to rely on hybrid solutions that blend multiple technologies.
One area where relatively little research has been done to date is in combining GNSS with terrestrial radio signals to enhance automotive positioning accuracy. Cellular vehicle-to-everything (C-V2X), IEEE 802.11p V2X, its successor 802.11bd and ultra-wideband (UWB) can all be used for short-range distance measurements. V2X ITS communications technology is listed as a potential positioning solution in EN 302890 (Intelligent Transport Systems), while UWB technology is gaining momentum for indoor applications, as well as by vehicle manufacturers for keyless entry.
These technologies are all ripe for further investigation as complements to GNSS and IMUs, to ultimately support higher levels of vehicle autonomy. U-blox recently ran a study to evaluate the terrestrial-ranging strengths and weaknesses of IEEE 802.11p V2X and UWB as part of a hybrid solution with GNSS for automotive navigation. Our aim was to establish their feasibility for this application, and identify where further research needs to happen for this type of hybrid navigation solution to become part of future autonomous vehicles.
A terrestrial-ranging system requires a network of fixed ground stations (typically referred to as roadside units, or RSUs, in V2X systems) at known locations. V2X or UWB signals sent out by the vehicle are returned by the RSUs, enabling the vehicle to measure the roundtrip time, and consequently calculate the distance between itself and the anchor point. Do this for three or more RSUs that are geometrically dispersed relative to the vehicle, and you can determine its position.
The need to simulate
Mass deployment of the RSUs required for this type of solution has not yet happened. Installing a suitable network of ground stations in an urban setting on public land wasn’t feasible for our research, in part because the regulatory landscape around UWB in this context is still evolving.
Instead, we set up anchor points around various private estates, from open fields to areas representative of urban environments, such as a business park. We took extensive measurements of the UWB and V2X signals’ behavior in these environments, which enabled us to extract performance statistics such as noise, and subsequently create a behavioral simulation model for the ranging performance.
Our test methodology
Having established our behavioral simulation model for different types of environments, rural, urban and indoor settings, we did a number of real-world test drives. These covered a wide range of driving conditions. We took in high-speed sections of open road, dense urban areas, start-stop congested traffic, numerous corners, and places with limited or no GNSS reception such as tunnels.
During these drives, we collected both GNSS measurements and ground truth. For the former, we used a u-blox NEO-M8L module with built-in IMU. To establish the ground truth, we used a high-grade real-time kinematic (RTK) receiver, GNSS augmentation data service and a high-spec IMU.
We classified each section of the test drives based on the environment — dense urban, tunnel, open countryside and so on — to enable us to apply the appropriate noise models in our simulation.
Next, we allocated RSU positions based on chosen density and placement rules, and added 2 m of random height variation, to ensure we avoided a fully planar deployment. We tested with various numbers of RSUs, to help understand how many would be required to achieve the necessary levels of location precision.
We then set additional simulator variables, such as the accuracy of the timestamp on the ranging measurements.
Having done all of this, we generated simulated ranging measurements between the RSUs and the truth position for every ranging epoch. To these, we added noise on a sample-by-sample basis, and merged the resulting noisy simulator measurements with the GNSS measurements we recorded en route.
Key findings
The output of the simulator enabled us to generate performance statistics that facilitated a comparison between the hybrid GNSS + V2X and GNSS + UWB solutions and a conventional GNSS + IMU solution, similar to those found in mainstream vehicles today.
The table below shows performance of the three solutions.
UWB
V2X (IEEE 802.11p)
GNSS+IMU
Ranging update rate
0.67 Hz
(1.5 s interval)
10 Hz (0.1 s interval)
n/a
Horizontal accuracy
0.1 – 2.5 m (Hybrid)
1.1 – 4.2 m (Hybrid)
1.2 – 5.5 m
Height accuracy
0.4 – 5 m (Hybrid)
5 – 10 m (Hybrid)
2 – 7 m
Frequency of operation
6.5 GHz
5.9 GHz
n/a
Signal bandwidth
500 MHz
10 MHz
n/a
Performance of the three navigation solutions on test.
At a very high level, we found that the GNSS+V2X (IEEE 802.11p) system achieved performance similar to a conventional GNSS+IMU(DR) solution using standard positioning. In situations where there is no GNSS reception, or where this is seriously degraded, an IMU also loses its value, given its reliance on continual GNSS reception to remain aligned. Here, a V2X-based positioning solution would be of value for navigation guidance.
However, more work will need to be done, including into the role of the IMU in high-integrity, high-accuracy positioning, to achieve the levels of accuracy and integrity that autonomous applications require.
The GNSS + UWB hybrid system delivered significantly better performance, approaching the levels that can be achieved using an RTK-based GNSS augmentation service. Our test system ran at 0.67 Hz, and was able to deliver precision close to 10 cm, though we would expect future production systems to align with the more common 10-Hz refresh rate broadly used in V2X.
By pairing a 10-Hz UWB ranging system with a high-accuracy GNSS system using correction data, it should be possible to achieve 10 cm-level accuracy in most situations. GNSS with correction data is already proven to be capable of delivering this level of precision in open areas and motorways. A network of RSUs deployed in urban environments would enable UWB to complement high-accuracy GNSS in situations where satellite reception is challenging.
However, the limited range of UWB, coupled with current regulatory restrictions around outdoor use, limit its usefulness at the present time. That said, micro-navigation in indoor areas, such as parking garages, could be a good fit for this technology.
Other lessons learned
The research brought to light a number of other important findings. First, having even just two RSUs visible, in addition to GNSS, provided significant benefit in the hybrid solution.
Second, height variation in the RSUs is essential if the navigation system is to determine the vehicle’s height accurately, particularly with V2X technology. This will be particularly important when it comes to enabling vehicles to safely operate where there are different levels of road one above the other, such as at multi-level junctions.
Third, we were successfully able to build a hybrid filter to process the signals from the V2X, UWB and GNSS systems, and seamlessly handle the transition between areas with GNSS only (where there were no RSUs deployed) and terrestrial ranging only (such as tunnels).
Fourth, despite the promise it showed for this application, terrestrial ranging is far from immune to environmental effects and multipath. Even UWB would sometimes suffer from non-line-of-sight signal propagation.
Finally, accurate time alignment between the GNSS and terrestrial ranging measurements also emerged as a critical factor. Where we had initially anticipated that alignment to within a few milliseconds would be sufficient, in reality we found we needed to be below 100 microseconds.
What next?
This research has shown the potential of using terrestrial-radio ranging to complement the existing positioning technologies and services being deployed in vehicles today. That said, more needs to happen, not least on the regulatory front, for this technology to genuinely become one of the enablers of future autonomous vehicles.
Outdoor UWB use needs to be permitted for this application, for example, and there needs to be widespread deployment of UWB-capable RSUs. Moreover, when RSUs of any kind are being deployed, thought needs to be given to their possible use as positioning anchors, rather than simply as communication devices.
In addition, more spectrum and wider channels need to be allocated to V2X. And we need to see positioning primitives and signals incorporated into the V2X standards. (Positioning primitives allow a car to know in what direction it is headed — up/down/left/right — relative to a point of reference. It uses signals from the sensors to calculate these values.)
A related area that merits further investigation is the use of UWB ranging to protect vulnerable road users such as people walking, wheeling and cycling. With modern smartphones and cars both now including UWB technology, there are opportunities to use this to make autonomous vehicles more aware of the position of people in their surroundings.
If you’d like to find out more about the research, our methodology, or the results, we’d be delighted to discuss these with you. Please email [email protected] to get in touch.
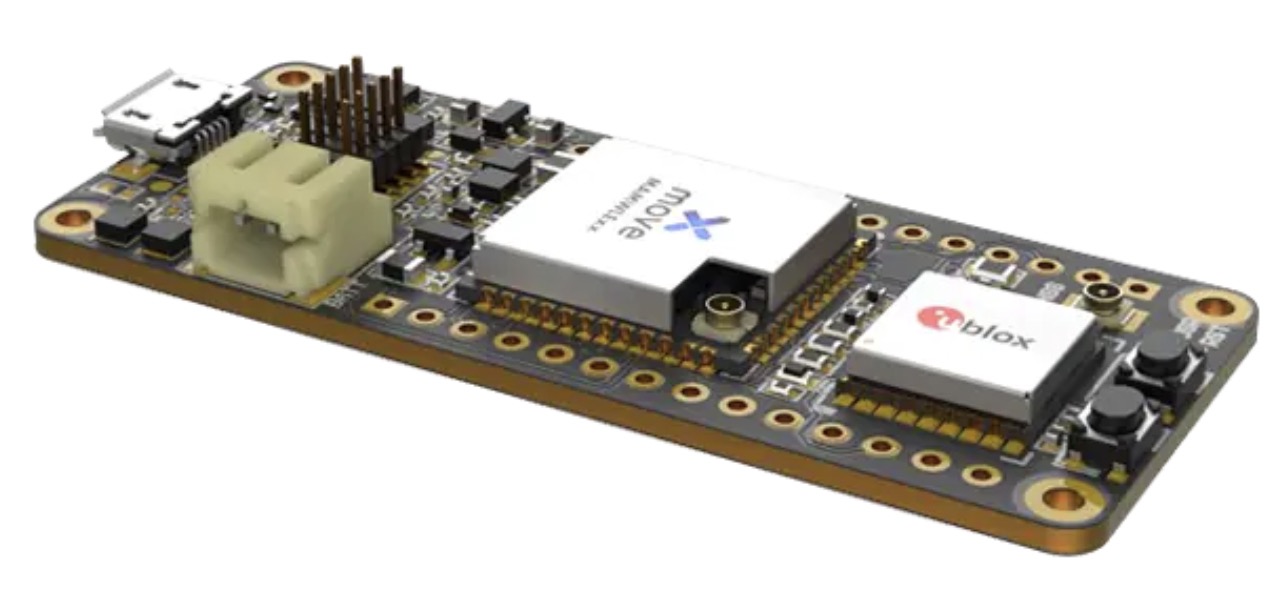
Telecommunication electronics company Move-X is offering a new LoRa/GNSS board. The Cicerone LoRa/GNSS board is a high-performance, low-power, Arduino MKR-compatible development board based on the u-blox MAX-M10S GNSS module and the MAMWLE LoRa module.
The Cicerone board delivers high-performance GNSS, long-range wireless connection, and high-performance MCU processing in a low-power solution for optimal battery life.
The board allows users to build tracking applications worldwide with meter-level accuracy and to communicate long-range, low-power data via LoRaWAN. The integrated Li-Po charging circuit enables the Cicerone board to manage battery charging through the USB port.
The Move-X Cicerone LoRa/GNSS board has a compact 63 x 25 mm form factor and is compatible with all Arduino MKR shield boards. These boards all share a common pinout to enable developers to easily add expansions with minimal software changes.
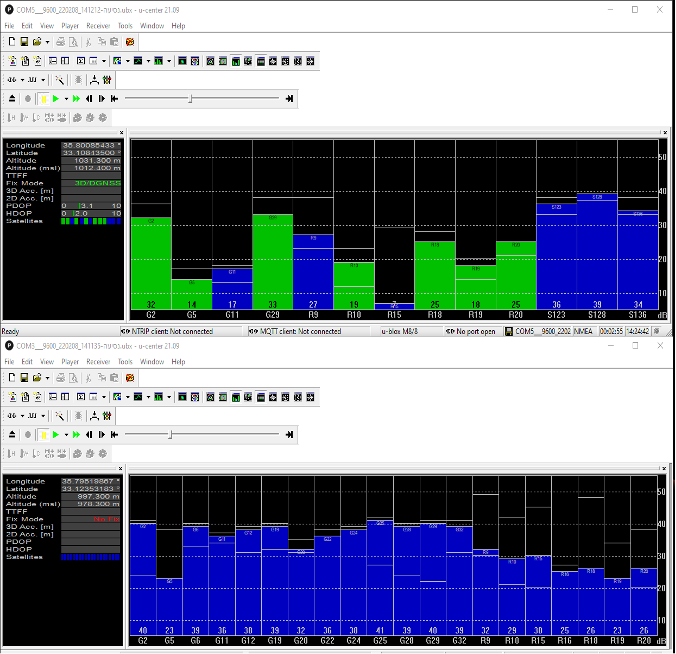
InfiniDome has conducted testing and measurements in the Golan Heights along the Israel-Syria border. The goal of the tests was to hunt down jamming events, record them, see how they affect both protected and unprotected receivers, and then compare the results.
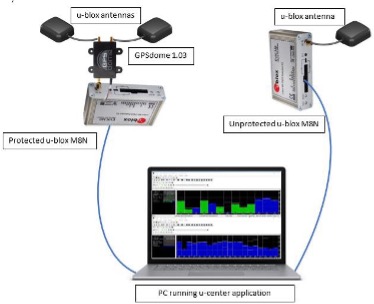
Two identical u-blox M8N receivers aboard a UAV were tested side by side, with one protected by GPSdome technology.
The GPSdome anti-jammer is a retrofit module that can be easily integrated to protect any GNSS-based system. It combines patterns from two omnidirectional antennas to create a null in the direction of the jamming signal, thus attenuating its power, making any GPS receiver about 50 times more resilient to jamming.
In a video of the tests, the GNSS receiver protected by GPSdome can be seen maintaining the GPS signal along the border, enabling uninterrupted navigation.
In contrast, the unprotected GNSS receiver loses the GPS signal during the attack, which can easily result in the drone becoming completely jammed, aggressively drifting and eventually crashing.
The Israel-Syria border experiences frequent jamming from Russian forces positioned in Syria, affecting critical border surveillance operations in the Golan Heights. Other global hotspots for jamming include the U.S.-Mexico border, where drug cartels use jammers on U.S. border surveillance drones, and the Shanghai port in China, where pirates may be the cause of ship and plane navigation confusion through use of jammers.
Jamming in Ukraine has also been well documented, with attacks from Russian forces taking down any plane, drone and even critical infrastructure asset in proximity, according to infiniDome.
Two screenshots of recordings during the event: The top image is of the GNSS receiver (u-blox M8N) protected with the GPSdome, ensuring continuous navigation. The bottom is unprotected and shows how the M8N was completely blocked for the entire route. (Images: InfiniDome)
The jamming attack was analyzed and appears not to have been a brute force attack, but rather a slightly more sophisticated signal, causing the receivers to “see” satellites but not be able to sync their signals and track them. The receiver protected by the GPSdome was able to distinguish between the real GNSS signals and the jamming signals.
In addition, GPSdome was able to attenuate the jamming signals sufficiently to be able to continue tracking the real GNSS signals while at the same time reporting the attack via its dedicated alert output.
Because GPSdome is both lightweight and easy to integrate (see integration diagram below), it can effectively provide much-needed resilience to drones and UAVs from widely available jammers, enabling drone operators to carry out missions safely and reliably.
U-blox has announced its smallest GNSS module series to date, the u-blox MIA-M10.
Built on the ultra-low-power u-blox M10 GNSS platform, MIA-M10 offers a power-efficient solution for size-constrained battery-powered asset tracking devices. The module targets an expanding market for people, pet and livestock trackers, as well as industrial sensors and consumer goods.
The 4.5 x 4.5-mm form factor of the M1A-M10 allows developers to design more attractive and comfortable solutions, further driving the adoption of positioning technology in consumer and industrial solutions. The module offers ultra-low power consumption without compromising GNSS performance, the company said. Moreover, its power-save modes can double the battery life by optimally balancing position accuracy and power consumption.
Like all u-blox M10 modules, the MIA-M10 concurrently receives four GNSS constellations (GPS, Galileo, BeiDou and GLONASS) for maximum satellite signal availability. Combined with its superior RF sensitivity, the module offers robust positioning performance for solutions with small antennas as well as for devices operating in weak signal environments such as deep urban canyons.
Support for u-blox AssistNow assisted GNSS service, which delivers orbital data via the internet, cuts the time it takes the MIA-M10 to determine its initial position at startup, allowing it to immediately track satellites without having to wait for slow satellite data downloads to complete. And applications requiring extra-long power autonomy can use u-blox’s CloudLocate service, which extends the life of internet-of-things applications by offloading power-hungry position calculation to the cloud.
The chip-sized, ready-to-use GNSS module requires no external components, reducing engineering and testing efforts, saving costs and resources, and speeding time to market.
Two Variants
MIA-M10 is available in two product variants.
The MIA-M10Q is for a growing market of highly size-constrained battery-powered tracking devices, wearable devices and highly dynamic applications such as small drones, cameras, bike computers and battery-powered sensors.
The MIA-M10C targets customers requiring more flexibility to combine the module with an active or custom antenna circuit.
The MIA-M10 will be on display at the Sensors Converge and Embedded Technologies trade show in San Jose, California, at booth 1228. First samples will be available in July.
ArduSimple has announced the availability of a range of GNSS starter kits for anyone in Europe or the United States who is interested in testing or integrating high-precision centimeter accuracy for a service or product proof of concept (PoC).
Building a PoC for increasingly common applications such as autonomous vehicles, where high levels of positioning accuracy are required, is often a complex process. Finding compatible antennas that are tuned correctly, CPUs, modems that connect to GSM, sourcing a global SIM, finding a suitable real-time kinematic correction engine that works in multiple regions, and mounting it all on a board is a lengthy and costly process, according to ArduSimple.
To solve this issue, ArduSimple pulled together the components and services required into a range of starter kits that work out of the box. The simpleSSR Starter Kit works anywhere in Europe and the United States that has a 4G signal.
“Bringing together the components, high-precision accuracy and connectivity in Europe and the United States in one simple out-of-the-box solution will significantly speed up the process of PoC projects,” said Marc Castillo, senior consultant at ArduSimple. “We’ve reduced the complexity, enabling engineers to focus on the feasibility of their projects.”
The kit includes:
1 simpleRTK2B-F9P V3 board
1 u-blox ANN-MB-00 Antenna for GNSS Dual Band with cable (IP67)
4G radio module with NTRIP client including RTK-SSR engine (XBee socket compatible)
Featuring the full gamut of u-blox technologies and services, the XPLR-IOT-1 enables end-to-end proofs of concepts for IoT products and applications
The u-blox XPLR-IOT-1 IoT explorer kit. (Image: u-blox)
U-blox has announced the u-blox XPLR-IOT-1 IoT explorer kit, an all-in-one package to test, evaluate and validate applications for the internet of things (IoT).
The board hosts an ultra-low-power MAX-M10S positioning module capable of concurrently tracking four GNSS constellations, delivering highly reliable location data wherever GNSS coverage is available.
Integrating all relevant u-blox technologies and services into a capable prototyping platform with a vast selection of sensors and interfaces as well as cloud connectivity, XPLR-IOT-1 makes it easier to explore the potential of IoT applications.
The increasing complexity of IoT devices, which often require satellite-based positioning, Bluetooth low energy, Wi-Fi, and cellular connectivity via, for example, LTE-M is raising the importance of prototyping and validating ideas before bringing them to production. This trend is driving demand for multifunctional application boards like the u-blox XPLR-IOT-1 over evaluation kits (EVKs), intended to comprehensively test a product’s entire feature set.
Prototyping platform
The XPLR-IOT-1 gives users everything they need to prototype low-power IoT use cases such as logistics container trackers, industrial automation, sensor-to-cloud applications, and fleet management solutions. Besides the MAX-M10S positioning module, the board has a u-blox NORA-B106 Bluetooth LE 5.2 radio module that doubles as its main MCU, hosting the application software and controlling the other modules.
Other modules include a u-blox SARA-R510S for LTE-M and NB-IoT cellular connectivity with built-in cloud security, as well as a u-blox NINA-W156 for 2.4 GHz Wi-Fi.
The hardware is complemented by a broad selection of sensors commonly used in IoT applications, including accelerometers and gyroscopes, a magnetometer, and temperature, humidity, pressure and ambient light sensors. A power-on switch, LEDs and user buttons make it easy for users to interact with the device.
The NORA-B106’s powerful Arm Cortex M33 MCU is solely dedicated to running the application software. Clocked at 128 MHz, with 1 MB of embedded flash and 512 kB of RAM, and 8 MB of external flash memory, it offers a solid foundation for development of highly capable solutions.
Integrated antennas for featured technologies, a USB interface and USB charging, a Sparkfun Qwiic I2C connector, and a debug interface contribute to a smooth product development experience, u-blox said.
Native support for u-blox services
The XPLR-IOT-1 offers engineers an easy way to start working with u-blox’s services offering. Included with the kit is a trial of MQTT Anywhere, which delivers ultra-low power by communicating data between the device and the enterprise using the MQTT-SN (MQTT for sensor networks) protocol.
Tracking applications with the most stringent power requirements such as freight container trackers can realize four times longer battery life with u-blox’s positioning in cloud service, CloudLocate, while the CellLocate mobile-network-based location service extends tracking beyond the reach of GNSS signals.
A starting point for commercial end-products
Developers working with XPLR-IOT-1 can use code from u-blox’s ubxlib GitHub repository, a library of software examples for key use cases, to speed up the prototyping of solutions, which can range from wireless sensor networks to indoor and outdoor tracking solutions to industrial or smart building gateways.
Because all hardware design files, software, smartphone app, and online dashboard source code are shared, the XPLR-IOT-1 can also serve as a starting point for commercial end-product design.
“The XPLR-IOT-1 is fully geared towards rapid development, testing, and validation of IoT solutions,” said Pelle Svensson, senior principal, Product Strategy Short Range Radio, u-blox. “Offering a single platform to develop a variety of IoT use cases, the versatile explorer kit reduces the expertise required for hardware, software, and service integration and code development.”
Once launched in June 2022, the XPLR-IOT-1 will initially be sold via Digi-Key.
The Drone Tournament has relaunched following the COVID pandemic, and will take place June 8-10 in Helsinki, Finland.
In the competition, drones will compete to prove precision-control drones over land and sea. GNSS companies Septentrio, Spirent and u-blox will take part.
Sponsored by Ultrahack, the competition seeks to boost use of drone technology, including for 5G networks and satellites. The challenges are especially related to landing and precision flight in demanding and changing environments. Contestant drones will use a wide spectrum of navigation and sensor technology, including GNSS.
U-blox, Spirent and Septentrio are offering their GNSS technology for the participants.
Septentrio and u-blox will provide GNSS services that teams can use to increase performance as they land their drones on a moving boat. To help improve performance, Septentrio and u-blox will provide access to data streams from a base station on the shore and on the boat.
The streams will provide raw observations in RTCM3 format via NTRIP (which can be used to compute a real-time kinematic, or RTK, position of the drone). The stream from the boat will also provide position, heading and speed of the boat over an IP connection in NMEA or binary format.
Using these streams can help to obtain an RTK solution on the drone or to know the relative position between the drone and the boat.
The winners will receive monetary prizes and the possibility of negotiating commercial agreements for further development of their solutions.
The partnership will help to grow global adoption of the u-blox PointPerfect high-precision positioning service, in particular for automotive applications.
U-blox and Geespace have signed a memorandum of understanding (MOU) on the expansion of their respective augmentation services for high-precision applications.
Geespace is a provider of aerospace information and communications infrastructure and application solutions. Both partners will be able to extend their service offering to the U.S., European and Chinese markets, primarily in the automotive sector.
The rise of reliable and cost-effective high-precision positioning has improved the accuracy of GNSS solutions to the order of tens of centimeters, enabling a plethora of new applications in automotive, as well as industrial and robotics segments. Global adoption has, however, been hampered by a fragmentation of the augmentation services landscape, thee companies said.
For global adoption to become a reality, worldwide coverage is required, as is unified pricing and business models designed to serve mass-market high-precision solutions for automotive and industrial customers operating on a global scale. The resulting differences in technical specifications have also made development of such solutions requiring different services complex.
The MoU between u-blox and Geespace seeks to create a combined offering that will enable both companies to offer full-stack high-precision positioning software and hardware solutions to customers across the U.S., European and Chinese markets.
Also, it will enable Geespace, which provides automotive GNSS augmentation services to its parent company Geely Group, to use the u-blox PointPerfect GNSS augmentation service to grow its coverage to serve Geely’s automotive brands. Headquartered in Hangzhou, China, Geely Group brands include Geely Auto, Lynk & Co, Zeekr, Volvo Cars, Polestar, Lotus, London Electric Vehicle Company, Farizon Auto and CAOCAO Mobility.
The MOU also will enable u-blox to expand coverage of PointPerfect to offer customers a comprehensive high-precision solution for products sold in China, and benefit from simplified development and logistics efforts.
U-blox and Geespace have signed a memorandum of understanding to expand their respective augmentation services for high-precision applications. Both partners will be able to extend their service offering to the U.S., European and Chinese markets, primarily in the automotive sector.
Geespace is provider of aerospace information and communications (AICT) infrastructure and application solutions.
The agreement between u-blox and Geespace seeks to create a combined offering that will enable both companies to offer full-stack high-precision positioning software and hardware solutions to customers across the United States, Europe and China. It will enable Geespace, which provides automotive GNSS augmentation services to its parent company Geely Group, to use the u-blox PointPerfect GNSS augmentation service to grow its coverage to serve Geely’s automotive brands.
Meanwhile, it will enable u-blox to expand the coverage of the PointPerfect service to offer customers a comprehensive high-precision solution for products sold in China, and benefit from simplified development and logistics efforts.
The rise of reliable and cost-effective high-precision positioning has improved the accuracy of GNSS solutions to the order of tens of centimeters, enabling new applications in the automotive, industrial and robotics industries. Global adoption has, however, been hampered by a fragmentation of the augmentation services landscape, the companies stated in a press release.
For global adoption to become a reality, worldwide coverage is required, as is unified pricing and business models designed to serve mass-market high-precision solutions for automotive and industrial customers operating on a global scale, the companies said.