First off, let me offer my prayers for those who were affected by the powerful earthquake that occurred in Haiti yesterday (Tuesday). You can view USGS maps of the area here. ESRI is offering Disaster Response and Assistance. God Speed.
I received some feedback from last week’s column “PDA vs. Tablet: Is the War Over or Just Starting?” and also some additional comments.
While I focused on the tablet side of the equation last week, it’s prudent to make mention of the PDA side of the equation.
But first, one reader pointed out that they use “convertible” tablet computers for GIS data collection. The reader comments…
“I think it would have been at least worth a mention to bring up the convertible notebooks that operate as tablets in your article. Now that we do all of our inspections electronically, our field inspectors use Panasonic Toughbooks w/the screen rolled around, in the field. Everything they do is w/the pen since the keyboard ends up underneath, so technically, they are using it as a pen based tablet. Also, we are using the handwriting part and it works pretty good, not great – the one place we do use it every time is to capture the signature of the person we inspected (as an image, not to recognize the characters). Finally, they all have and use a Pentax bluetooth printer to leave a paper inspection record at the site when they are done. A pdf copy of the document that prints out is kept in the system as the official record.”
There is a pretty significant manufacturing base of convertible tablet computers. For example, Fujitsu used to have a multi-model line-up of slate tablet computers; now they just have one. But, they have a multi-model line-up of convertible tablets. It didn’t used to be that way. I think the reason is somewhat obvious. The convertible can easily be used as the user’s default notebook computer. Although you can use a slate tablet in the same manner (as your default notebook computer), it just doesn’t work out that way. For me, it was due to the smaller screen size and slower processor that I didn’t use my slate tablet as my default notebook computer.
PDA Side of the Equation
As much as tablet computers have hit a number of speed bumps, the PDA (personal digital assistant) has taken a similar path. They weren’t always popular. Remember the Apple Newton?
Not until the Palm V was introduced in 1999 did the PDA really gain mass popularity. At nearly the same time, Microsoft introduced a Windows Operating System for handhelds called Pocket PC 2000.
From a handheld GIS data collector point of view, mass acceptance of handheld computers has helped pave the way for improved “industrial-strength” handhelds. Whereas there used to be a myriad of industrial handhelds based on proprietary operating systems in the 1990s used for applications such as meter reading, barcode scanning, surveying, and GIS data collection, they have become somewhat standardized on the Windows Mobile operating system and borrowed many developments from their consumer brethren.
However, the handheld GIS data collector business is still fuzzy. Do I use a dedicated industrial handheld (somewhat expensive)? Do I use a consumer PDA (cheaper but more fragile)? Do I use a smartphone (I already have one, so really cheap)?
I’ve used the first two extensively. I’ve never tried using a smartphone to run ArcPad or other GIS data collection program. I’ve known some people who have tried and the problem usually ends up being the lack of system resources to run the phone and a GIS data-collection program at the same time or Bluetooth connectivity problems when using an external GPS receiver.
With a consumer PDA (such as the IPaq), my experiences were so-so. They are small and convenient, but the ruggedness factor always worried me, and I usually had trouble reading the screen in bright sunlight. Battery life was always an issue, and working in the rain was not possible. There are ruggedized cases available for consumer PDAs, but I never purchased one because I have several PDAs and the ruggedized cases are model-specific for the most part.
With industrial PDAs, my experience has been pretty good. The only data I ever lost was when I left the handheld on the roof of my rental car and drove back to the hotel. I found the heldheld, but unfortunately, so had the tires of a half-dozen cars.
Increased competition in the industrial handheld market has brought prices down. TDS/Trimble just reduced the price of its Nomad 800B to $1,449 to compete with Swedish newcomer Handheld. Juniper Systems and Getac/MiTAC are also gaining market share. This is good news for the user community as more competition usually results in better and cheaper products.
A Quick Note on the New 24+3 GPS Constellation
Earlier this week, the US Air Force announced they will be transitioning the GPS constellation to a new configuration. The new constellation will have three new slots for satellites and will improve the quality of GPS coverage worldwide. While there is already 24/7 GPS coverage all over the world, the new configuration will result in more satellites in view at a given time as well as a reduced PDOP. PDOP is a measure of the quality of the GPS constellation being tracking by a GPS receiver at a given time and has a direct affect on GPS accuracy.
For the mapping and surveying community, this is probably the most significant announcement since Selective Availability was turned off nearly 10 years ago.
Not much happened over the Christmas holidays in GIS but this holiday season many of you are experiencing some impact from the down economy or at least know some one who is. Add health care reform, cap and trade, the war, the growing deficit, and climate change, and things look pretty grim. Well, cheer up — things are not as bad as the media paints them.
We are luckier than most since the impact has been less severe on the GIS community. Much of that falls due to the non-cyclical nature of GIS work, and fortunately GIS is no longer a luxury but an integral part of government operations. I was surprised to see that according to the Bureau of Labor and Management, the unemployment level for college-educated workers is only slightly over 4 percent. I can only guess that it is the same or lower for GIS professionals.
We sometimes forget the blessings we have and how much better life is. The news media seem to gravitate toward pictures that are more dramatic and onerous than reality, but many times, reality is actually quite different from our first reaction. Here are some fun geographic examples that have been the subject of heated barroom discussions:
What major U.S. city would you fly over if you flew due west from Rome, Italy? Answer: Boston. It seems counter-intuitive because we think of Rome as being in a warm climate. It is, but its location in the Mediterranean results in a warmer climate than Boston.
What course would you steer from Norfolk, Virginia to reach the Bahamas: south, southeast, or southwest? Answer: south-southwest. We think of the Bahamas as being east of Florida and they are, but few realize how far east the Virginia/North Carolina coast is compared to south Florida.
If you were sailing from the Gulf of Mexico to the Pacific Ocean via the Panama Canal, what approximate course would you steer? Answer: southeast. One thinks of the Pacific being west of the Gulf and it is, but the Isthmus of Panama forms an “S” at the canal location so the canal actually runs southeast heading to the Pacific; parts of it even run east-northeast.
My point? Things are not always as they seem. We in the GIS community have the tools to view the world scientifically as it is, not as one would guess. We have the ability to display complex data accurately and in visually compelling ways. We owe it to our citizens to be thorough from both sides and not just doom and gloom. As a senior citizen I’ve personally seen many changes for the better, not the apocalyptic vision of dystopian worlds such as 1984 or Soylent Green.
Two real-world environmental examples:
The first Navy ship I served on had an overhaul at a Brooklyn shipyard right on the East River. In 1975 the East River was very simply an opaque brown open sewer. My sailors had impromptu contests, as they worked over the side, as to who could count the most condoms or the most t..ds floating past the ship. One day we even saw a face down body in a dark suit floating down the river. The police recovered the stiff, and the event didn’t even make the local news. Things have changed. Last year I was shocked to see the East River with enough clarity to actually see several feet into the water. It was not the same river.
When I was a small boy living in 1950 Chicago, I saw my mother scrubbing the blackened collars of my Dad’s white shirts. “Ring around the collar” was a very significant problem due to the coal dust and soot in the air. Although before my time, I was told that it was even worse in the early 1900s. The air was so dirty that people who wore white dress shirts would have filthy cuffs by the time they arrived at work. To counter the problem they would fold back their cuffs and then unfold the cuff upon arrival at work revealing a clean cuff. I haven’t seen air that dirty in any U.S. city recently. Today the carry-over on many dress shirts is a sewn seam about ¾’ from the base of the cuff that facilitated the folding.
I know that these are only anecdotal observations, but they certainly highlight that things are better in many aspects of the environment. Now let’s consider a transportation-related unintended consequence.
Several years ago there was a bill before Congress to require mothers who travel with infants onboard aircraft to place them in car seats rather than in their lap. On first glance, it sounds like a good idea, but let’s consider the unintended consequence. A study was done to determine the impact of the proposed law. A college research team determined that the number of infants that would be saved with car-seat use would be minimal since most air crashes are catastrophic. However, requiring a mother to buy two tickets would “push a whole bunch of them out the bottom” since many couldn’t afford two seats. Putting those mothers behind the wheel of a car, a much more dangerous travel method, would result in significantly more baby deaths. So the impact of the law would be to kill more babies.
The strong capability of GIS is in data visualization of complex intended and unintended effects. GIS has shown the effects of global warming very clearly, and if we stick to faithfully analyzing and displaying the data, no one can fault our work. I do believe that we need to consider all scientific work in the arena of ideas. Some researchers question the impact and/our ability to mitigate human effects. We also know that the implementation of draconian measures could be worse, having an extremely severe and devastating impact on the poor. It was very disappointing to hear of climate researchers fudging the data or trying to exclude conflicting research. This is too important an issue, and there is too much at stake to undermine the credibility of research on this issue. Winston Churchill once said “With integrity nothing else counts, and without integrity nothing else counts.”
So my wish for 2010 is for everyone to do good work and live by the GISP code of ethics, and for there to be more optimism. History has shown that nature sides with the optimist. Life is good and getting better, so I choose the see the glass as half full.
2010 will be a decisive year for the tablet computer.
Let’s face it, tablet computers have had a tough time gaining traction in past years. For manufacturer’s, it’s been a relatively small niche business. I recall back in the late 90’s I was looking at what was available and there wasn’t much. There were a few smaller companies like Xplore Technologies, Walkabout Computers and some others. The big daddy of that day was Fujitsu. While several large high tech companies (eg. HP) have ventured into the tablet business, most, if not all, have exited the tablet business at some point. Fujitsu is about the only one that has hung around and still in it today. However, just earlier this week. Microsoft CEO Steve Balmer presented at the Consumer Electronics Show (CES) and held up the yet-to-be-introduced HP tablet.
Although tablet computers have been around for many, many years, there is a new breed of manufacturers with some very interesting tablet computers in their pipeline that will cause users to think about tablet computers again.
By tablet computer, I’m referring to the “slate” style tablet computer that uses a pen for data entry because it has no keyboard. Something like these…
Think about the limitations of tablet computers in the past:
1. Size
2. Poor screen readability in various lighting conditions
3. Expensive
4. Poor hand-writing recognition
5. Poor battery life
SIZE
In my personal experience, size and weight was a major deciding factor as to whether I grabbed my tablet (yes, I own one) or a PDA to take into the field for GIS data collection. In my mind, the driving factor would be if I needed the screen size for the particular project. If I could make do with the smaller screen size of the PDA, I’d use the PDA because it was easier to carry, especially if I was using a four-wheeler or driving some other utility vehicle while mapping.
However, this may change. Tablets with smaller screen sizes (eg. 7″) are being introduced. More sophisticated software and more extensive datasets are being carried in the field. If these factors overcome the ergonomic disadvantage, tablet computer use in the field will increase.
POOR SCREEN READABILITY IN VARIOUS LIGHTING CONDITIONS
The readability of tablet screens outdoors is a major issue. In fact, at one point some manufacturer’s forced you decide, when purchasing, whether to select a screen used for “indoor”, “indoor/outdoor” or “outdoor” use. The “outdoor” screen was absolutely useless indoors or even in the outdoors in poorly lit areas.
Some years ago, I purchased a model with the indoor/outdoor screen. It worked fine indoors and I’ve used it outdoors on a number of occasions, but found that it was tough to read in direct sunlight so I found myself trying to shade it so I could read it better. I gave up trying to use an orthophoto in the background because there just wasn’t enough contrast to be able to see the moving cursor and features I was recording.
But thanks to the explosive growth in the notebook computer industry, a lot of research and development money has been spent on improving screen technology. Nevertheless, some tablet manufacturers don’t even attempt to create products with screens that are readable outdoors. It takes a special effort to create such a product.
If you ever consider purchasing a tablet computer for field work, the first test you should conduct is screen readability in the environment we you’ll be collecting data.
EXPENSIVE
Historically and even today, tablet computers are a niche business. The volume of units sold on an annual basis is less than 1% of notebook computer annual volume. But, the development and production costs are higher than a traditional notebook computer. Therefore, the pricing of units is going to be higher. For ruggedized tablet computers, pricing can reach US$5,000. The going rate for my indoor/outdoor (not ruggedized but doable with a sturdy carrying case) tablet was nearly US$3,000 when I purchased it a few years ago.
Ruggedized tablets are still going to command a high price. For example, Trimble Navigation recently introduced the Yuma tablet. It’s got a 7” screen, has a 32GB solid state hard disk and is ruggedized for outdoor use. It’s priced at US$4,000.
However, in 2010 we are going to see many low-priced tablet computers entering the market. Freescale is reportedly going to introduce a sub-US$200 tablet netbook. Mio is working on their own 7” screen tablet. And, of course, Apple has announced their tablet that is rumored to be introduced in March 2010. Just think what the iPhone has done and you can imagine what will happen if Apple hits a homerun with their tablet product.
Even if they aren’t ruggedized, it won’t matter. If the unit prices are cheap enough, companies will designed ruggedized enclosures or special cases just like they did for the consumer PDAs (eg. Ipaq).
POOR HAND-WRITING RECOGNITION
I’m not sure this will ever be perfected. Even an accuracy rate of 98% means it will misinterpret 1 out of 50 words you write. Is that good enough? Personally, I set mine up to maximize “pick-lists” and sketching while minimizing hand-writing. At the end of the day, it’s not a deal-breaker. Users will adapt to the limitation.
POOR BATTERY LIFE
Like the advancement in screen readability, battery technology has also advanced so this is less of an issue than it used to be. Ideally, the battery would last an entire day on one charge. For GIS users, however, five hours on a charge is the minimum as long as the battery can be easily swapped during lunch-time. I don’t think this is a deal-breaker.
2010 – The Year of the Tablet?
Whereas tablet computers were seen as a higher-end niche business in years past, that will change in 2010. Several high-volume manufacturers like MiTAC, GETAC, ASUS, HP and Toshiba are introducing new tablet computers. In addition to leveraging off of the explosive growth of notebook sales, tablet computer product development is also leveraging off of netbooks, convertible, and UMPC product development efforts. They all have the same basic technology requirements (readable screen in various lighting conditions, battery life, hand-writing recognition, size, low pric
e). This will translate into lower cost of development, which will mean lower prices to the consumer….possibly much lower.
I’ve intended to write about the 2008 Federal Radionavigation Plan (FRP) for quite some time. It is an important document because it is the official policy document that drives the United States’ radio navigation (including GPS) program planning. According to the FRP, it includes the introductions, policies, radionavigation system user requirements, system descriptions, and operating plans of various radionavigation systems. The FRP is updated biennially. The 2008 FRP was approved in January 2009.
The FRP preface states that it is prepared jointly by the Department of Defense, Department of Homeland Security, and Department of Transportation with assistance from other government agencies. The document covers radionavigation systems used by both the civilian and military communities. It does not cover radionavigation systems used exclusively by the U.S. military.
The FRP is a fascinating document because it encompasses GPS, GPS augmentation systems, and “back-up” systems. In this column, I’m going to extract several statements from the FRP and comment on them. If you’d like to read the FRP in full (184 pages), you can do so here. Briefly, the FRP includes the following navigation technologies: GPS, WAAS, DGPS, LORAN, and VOR/DME/TACAN/ILS/MLS/NDB (all aviation-oriented).
By way of background and according to the FRP, the first version of the FRP was released in 1980 as part of a Presidential Report to Congress.
For the remainder of this column, I’ll provide quotes from the FRP that I think are relevant and add some commentary.
From the executive summary:
“A major goal of DoD and DOT is to ensure that a mix of common-use (civil and military) systems is available to meet user requirements for accuracy, reliability, availability, continuity, integrity, coverage, operational utility, and cost; to provide adequate capability for future growth; and to eliminate unnecessary duplication of services. Selecting a future radionavigation systems mix is a complex task, since user requirements vary widely and change with time. While all users require services that are safe, readily available and easy to use, unique requirements exist for military as well as civil users. For example, the military has more stringent requirements including performance under intentional interference, operations in high-performance vehicles, worldwide coverage, and operational capability in severe environmental conditions. Similarly, civil users desire higher accuracy and integrity for future highway, rail, and other safety-of-life applications. Cost is always a major consideration that must be balanced with a needed operational capability.”
EG Comment: As I did, you may think the “civil user desires” described in the executive summary are a small subset of actual consumer users, and that’s true. But, it’s important to remember that this document is focused on U.S. government users rather than commercial users.
However, it does raise a point about the consideration given to civilian users when program decisions are being made regarding GPS such as features, satellite launch schedules, ground infrastructure, and constellation management. I’m sure when a congressperson, who is making decisions regarding budgets, is researching the subject he or she will read this executive summary. The statement “civil users desire higher accuracy…” will mislead the reader. While there is a demand for high accuracy in the commercial civil user community, there is a much larger demand for products in the low and medium accuracy commercial markets.
While I’m not criticizing the executive summary for being incorrect, it seems to me that the people who control the purse strings (Congress) may not be given enough information to grasp the “big picture” regarding the GPS user community.
“Interoperability considerations —
“National and international radionavigation systems are sometimes used in combination with each other or with other systems. These combined systems are often implemented to provide improved or complementary performance. In the case of GPS, the USG encourages future interoperability with foreign space-based PNT systems for civil, commercial, and scientific uses worldwide. Examples of existing or future foreign space-based PNT systems are Russia’s Global Navigation Satellite System (GLONASS), the European Union’s Galileo, Japan’s Quasi Zenith Satellite System (QZSS), China’s Compass, and India’s Regional Navigation Satellite System (RNSS). Properly designed receivers that take advantage of these systems may benefit from additional satellite signals, increased redundancy, and improved performance over that obtained from just one system alone. A critical aspect of system interoperability is ensuring compatibility among radionavigation services. For example, the USG has concerns about radionavigation signal structures that could adversely impact the military and civil use of GPS. The USG has also fostered the use of interoperable augmentations through its adherence to international standards for DGPS and space-based augmentation system services.These include Maritime DGPS and the Wide Area Augmentation System.”
EG Comment: I have to say that the U.S. government has done a good job in the area of interoperability. In the 2001 Federal Radionavigation Plan, interoperability wasn’t discussed nearly to the degree it is in the 2008 FRP.
From the 2001 FRP: “Radionavigation systems are sometimes used in combination with each other or with other systems. These combined systems are often implemented so that a major attribute of one system will offset a weakness of another.…a few manufacturers have of navigation and positioning equipment have developed combined GPS/GLONASS receivers to take advantage of these benefits. Some receivers are on the market with others in the planning stage.”
From 2001 to 2008, the U.S. government’s position has morphed from recognizing that some GPS/GLONASS receivers exist to actually encouraging interoperability with all “foreign-based PNT systems for commercial, civil, and scientific uses worldwide.” That’s quite a transformation.
“General policy statement —
“As the full civil potential of GPS services and its augmentations are implemented, the demand for services provided by other Federally provided radionavigation systems is expected to decrease. The USG will reduce non-GPS-based radionavigation services with the reduction in the demand for those services. However, it is a policy objective of the USG not to be critically dependent upon a single system for PNT. The USG will maintain back-up capabilities to meet: (1) growing national, homeland, and economic security requirements, (2) civil requirements, and (3) commercial and scientific demands. Operational, economic, safety, and security considerations will dictate the need for complementary PNT systems. While some operations may be conducted safely using a single radionavigation system, it is Federal policy to provide redundant radionavigation service where required. Backups to GPS for safety-of-life navigation applications, or other critical applications, can be other radionavigation systems, or operational procedures, or a combination of these systems and procedures to form a safe and effective backup. Backups to GPS for timing applications can be a highly accurate crystal oscillator or atomic clock.”
EG Comment: I wrote to someone the other day about this. Back-ups to GPS is a serious issue. I think very few would argue that it’s not. The reality is that
there is no single back-up for GPS. It depends on the application. In aviation, it’s maintaining a minimal infrastructure of VOR/DME/ILS rather than Loran, according to the FAA. In maritime, it’s the legacy visual aids and charts according to the U.S. Coast Guard. For high precision users, it’s legacy technology like optical instruments and new technology like Locata and pseudolites.
“GPS backup —
“With respect to transportation to include aviation, commercial maritime, rail, and highway, the DOT has determined that sufficient alternative navigation aids currently exist in the event of a loss of GPS-based services, and therefore Loran currently is not needed as a back-up navigation aid for transportation safety-of-life users. However, many transportation safety-of-life applications depend on commercial communication systems and DOT recognizes the importance of the Loran system as a backup to GPS for critical infrastructure applications requiring precise time and frequency.”
EG Comment: The continuing Loran saga.
“Civil Signals —
“In addition to the L1 Coarse/Acquisition (C/A) signal, the USG will add three additional coded signals to support future civil applications:
• L1C, frequency 1575.42 MHz, providing better performance than the current C/A signal being used by civilian receivers;
• L2C, frequency 1227.6 MHz; and
• L5, frequency 1176.45 MHz, to meet the needs of critical safety-of-life applications, such as civil aviation.
“The L1C signal is designed to be interoperable with the European Galileo system and is being promoted as a future world standard for incorporation into Global Navigation Satellite Systems (GNSS). The next generation of GPS satellites, GPS III, will begin broadcasting L1C around 2014.
“The performance specifications in the current SPS PS apply to users of the L1 C/A (1575.42 MHz) signal. As new modernized GPS civil signals (L1C, L2C, and L5) achieve initial operating capability (IOC), performance standards for services utilizing these signals will be developed.”
EG Comment: Nothing new here, but the schedule of actually implementing the new civil signals is a moving target. There are only seven satellites broadcasting L2C at this time. The first Block IIF satellite with L5 should launch in the first or second quarter of this year. Satellites broadcasting L1C (Block III) won’t launch until at least 2014 and a full constellation won’t be operational for many years after that.
“Discontinuation of codeless and semi-codeless GPS access —
“As published in the Federal Register on September 23, 2008 (Volume 73, Number 185), the USG commits to maintaining the existing GPS L1 C/A, L1 P(Y), L2C and L2 P(Y) signal characteristics that enable codeless and semi-codeless GPS access until at least 31 December 2020. To enable an orderly and systematic transition, users of semi-codeless and codeless receiving equipment are expected to transition to using civil-coded signals by this date.”
EG Comment: I’ve written a lot about this. You can read some here.
“Military signals —
“Currently, GPS military users are provided P(Y) code signals on L1 and L2. These will be supplanted in the future by the M-Code, the next generation military GPS signal. The first GPS Block IIR-M satellite began broadcasting M-Code in September 2006. M-Code will significantly improve exclusivity of access because, in addition to being encrypted, it will be spectrally separate from civilian signals and other radionavigation satellite service signals, thereby enabling U.S. navigation warfare operations through spectral separation. Navigation warfare involves protecting U.S. and allied use of GPS while simultaneously preventing hostile forces access to GPS services and preserving peaceful civil GPS use outside of an area of military operations. The M-Code will permit higher power operation than the present signal design and will facilitate localized tactical denial of GPS civil signals to prevent their use by hostile forces. Military GPS receivers, when tracking the encrypted military signals, are much more resistant to interference than commercial GPS equipment. The newest generation of military GPS receivers that can access military GPS signals directly are even more resistant to interference; however, future improvements in signal availability and receiver performance will continue to be necessary.”
EG Comment: The key phrase is “localized tactical denial of GPS civil signals…”. Wow, what can I say about that? Come on GLONASS/CDMA, and Galileo, hurry up!
“Military use of GPS civil signals —
“DoD does not have an operational requirement to use the GPS civil signals, designated L1C, L2C, and L5, or the Wide Area Augmentation System (WAAS), with the exception of the Army validated WAAS requirement documented in the Global Air Traffic Management (GATM) Operational Requirements Document (ORD). Since DoD policy prohibits the use of civil signals or augmentation systems in wartime environments and dual equipage is not fiscally practical, type approval of military aviation receivers is required to eliminate the need for civil GPS equipage on military aircraft. This will provide an enhanced capability to span the operational environment for military aviation—from flight in civil airspace in peacetime to combat operations worldwide. Commercial operators of Civil Reserve Air Fleet (CRAF) airframes may elect to equip with L5 and/or WAAS if there is a demonstrated.”
EG Comment: Interesting.
“Mitigating Disruptions in Aviation Operations —
“A loss of GPS service, due to either intentional or unintentional interference, in the absence of any other means of navigation, would have varying negative effects on air traffic operations. These effects could range from nuisance events requiring standard restoration of capabilities, to an inability to provide normal air traffic control service within one or more sectors of airspace (the NAS is divided into hundreds of air traffic control sectors. A single air traffic controller has the responsibility to keep aircraft safely separated from one another within each sector and from other sectors. Sector dimensions vary, and are established based on predominant traffic flows, altitude, and controller workload) for a significant period of time.
“In addition to FAA plans of retaining a minimum network of VOR, DME, and ILS facilities to serve as a backup to GPS for the
near future, several other solutions have been identified to help mitigate the effects of a satellite navigation (SATNAV) service disruption:
“The L5 civil frequency planned for GPS will help mitigate the impacts of both solar activity and unintentional interference, but it may be 2018 before a full constellation of dual-frequency satellites (L1 and L5) is available. The dual frequency capability with L5 will address ionospheric scintillation by enabling receivers to calculate
actual ionospheric corrections, thereby preserving LPV capability during severe ionospheric storms.
Modern transport-category turbojet aircraft with inertial systems may be able to continue navigating safely for a period of time after losing radionavigation position updating depending on the route or procedure being flown. In some cases, this capability may prove adequate to depart an area with localized jamming or proceed under visual flight rules during good visibility and high ceilings, however, inertial performance without radionavigation updates degrades with time and will eventually fail to meet airspace requirements.
Integrated GPS/inertial avionics having anti-jam capability could reduce the area affected by GPS jamming or unintentional interference. Industry research is proceeding to develop this technology, with an expectation that it might be marketed to the general aviation community at some point in the future.
Users may have an option to equip with instrument flight rules (IFR)-certified Loran avionics, pending the improvements needed to achieve a nonprecision instrument approach capability with eLoran. A combined eLoran/SATNAV receiver could provide navigation and nonprecision instrument approach service throughout any disruption to SATNAV service.
EG Comment: This is a good description of the GPS strategy for aviation operations. But, honestly, if there’s a disruption once the National Airspace System (NAS) is fully reliant on GPS, it’s hard to see there not being major, major hiccups in the air traffic system.
“Mitigating disruptions in land operations —
“Surface transportation users currently use radionavigation services from GPS and its augmentations to supplement other available nonradionavigation systems. Under this operational paradigm, users seamlessly use other existing techniques to mitigate both the short-term loss of GPS due to obstructions and the longer-term loss due to failed on-board user equipment and adverse operating environments. In future applications, accuracy requirements are expected to become much more stringent, and GPS and its augmentations are likely to play a more critical role. The loss of GPS and its augmentations will be carefully evaluated within the overall operational environment to ensure continued safe and efficient operation of the land transportation system.
“Surface transportation agencies are working with industry to ensure that safety critical systems that use GPS and its augmentations consider the loss of these radionavigation services and are able to mitigate its effects in order to continue safe and efficient operation of the nation’s surface transportation infrastructure. This is accomplished today by outreach to user groups and local transportation agencies and defining minimum operational or functional standards. In the future, training for application developers, state and local highway and transit agencies, and motor carriers on the operational capabilities of GPS as well as what to do when failures occur may be necessary. Finally, since it is expected that signal availability from GPS may not be adequate for surface users experiencing canopy/urban obstructions, alternate systems that perform a verification test on the GPS navigation solution and that support continued operation in the event of a loss of GPS will be employed in a system-of-systems configuration.”
EG Comment: A great argument for multi-constellation receivers.
“Mitigating disruptions in non-navigation applications —
“Common positioning applications include: surveying and mapping; precision agriculture; emergency response and law enforcement; fire services; environmental resource management; utility location and management; asset inventory and management; and logistics. These applications have a highly variable duration and involve sporadic areas of operation. Because of the flexible character of positioning applications, operations will typically be halted until the GPS or GPS Augmentation signal is restored in an area. Optical and inertial surveying equipment are back-up options that could meet the accuracy requirements of these applications, depending on the capabilities and preparation of these operators.”
EG Comment: Multi-constellation receivers have already proven their value in non-navigation applications.
“Operating Plans – GPS —
“DoD will provide a 48-hour advance notice of changes in the constellation operational status that affect the service being provided to GPS SPS users in peacetime, other than planned GPS interference testing. The USG provides notification of changes in constellation operational status that affect the service being provided to GPS users or if a problem in meeting performance standards is anticipated. In the case of a scheduled event affecting service provided to GPS users, the USG will issue an appropriate Notice Advisory to Navstar Users (NANU) at least 48 hours prior to the event, in accordance with the GPS Standard Positioning Service Performance Standard (Ref. 9).
“Coordination of planned interference testing activities nominally begins 60 days before testing events. Users are notified by the USCG as soon as an activity is approved, and by FAA typically not earlier than 72 hours before an activity begins. DoD notice will be given to the USCG Navigation Information Service (NIS) and the FAA Notice to Airmen (NOTAM) system. The NIS and NOTAM systems will announce unplanned system outages resulting from system malfunctions or unscheduled maintenance.
“GPS will be the primary Federally provided radionavigation system for the foreseeable future. GPS will be augmented and improved to satisfy future military and civil requirements for accuracy, coverage, availability, continuity, and integrity. Current policy states that DoD will maintain a nominal 24-satellite constellation, and that replacement satellites will be launched on an anticipated need to maintain the constellation as satellites age and ultimately fail.”
EG Comment: Good policy statement on notification to civil users. You can sign up to receive NANU’s here.
Note the statement regarding maintaining a 24-satellite constellation. There are currently upwards of 30 operational GPS satellites. That’s a healthy number, but the problem is that they are still positioned as 24 satellites. In other words, several are “paired up” so the effective constellation is still only 24. There is discussion within the USG about repositioning some of the satellites to optimize the constellation and improve coverage. More on that soon I hope.
“Maritime and nationwide differential GPS —
“USCG began development of the MDGPS system in the late 1980s to meet the needs of the Coastal and Harbor Entrance and Approach (HEA) phases of
navigation and to enable automated buoy positioning. MDGPS service was certified fully operational in March 1999 after the network met the performance standards required for HEA navigation. PL 105-66, Title III, § 346 (111 Stat. 1449) authorizes the Secretary of Transportation to improve and expand the USCG’s MDGPS into a Nationwide DGPS, or NDGPS, by adding an inland segment. RITA coordinates this inland program and is acting chair of the NDGPS Policy and Implementation Team. Today, multiple Federal agencies, several states, and scientific organizations are cooperating to provide the combined national DGPS utility, with plans to complete NDGPS system coverage throughout the lower 48 states.
“Each NDGPS facility meets all operating parameters established to qualify a MDGPS facility for operational availability, as established by USCG. NDGPS was not designed to meet aviation integrity requirements.
“In addition to providing a real-time broadcast of differential corrections, the U.S. DGPS services provide a robust operational backbone to the DOC’s CORS application for post-processing survey applications and Webenabled location solutions, the National Weather Service’s Forecast Systems Laboratory for short-term precipitation forecasts, and the University NAVSTAR Consortium (UNAVCO) for plate tectonic monitoring. Where operational considerations allow, additional operational capability may be added, such as the broadcast of navigational or meteorological warnings and marine safety information (i.e., NAVTEX data) to support safe navigation at sea.
“Currently 39 USCG and nine USACE broadcast sites provide service for maritime coverage CONUS, the Great Lakes, Puerto Rico, portions of Alaska and Hawaii, and portions of the Mississippi River Basin. The inland NDGPS segment complements the MDGPS segment and is planned to provide dual coverage of the CONUS and selected portions of Hawaii and Alaska as a combined national DGPS utility. There are currently 38 DOT sponsored sites in the NDGPS network providing 92 percent of the contiguous 48 states with single coverage and 65 percent with dual coverage. The combined DGPS service will provide uniform coverage of the CONUS and portions of Hawaii and Alaska, regardless of terrain, or man-made and other surface obstructions. This coverage is achieved by using a medium frequency broadcast optimized for surface applications. The broadcast has been demonstrated to be sufficiently robust to work throughout mountain ranges, difficult terrain and other obstructions. The combined DGPS service will provide a highly reliable GPS integrity function to users to meet the growing requirements of surface users (transportation, precision agriculture, natural resources and environmental management, emergency management and response, and surveying and construction communities).
“As each new Nationwide site is added to the DGPS network, it is evaluated and tested to ensure that it meets the full operational capability specifications commensurate with a safety of life service. Once a site is declared fully operational, the site is monitored and maintained by the USCG to ensure support for safety applications. System coverage for a specific location can be obtained from the USCG Navigation Center (NAVCEN) website, http://www.navcen.uscg.gov.
“The two major deployment milestones have been established as nationwide single station coverage and nationwide dual station coverage (CONUS only). Under single station coverage, predicted to occur no earlier than 2010 (pending funding availability), users anywhere within CONUS will be able to receive at least one DGPS differential correction broadcast. The second major milestone is full coverage by at least two DGPS broadcasts, is expected to occur no earlier than 2012.”
EG Comment: This is a great example of where policy and the presidential budget don’t necessarily agree. NDGPS has been on the budget chopping block for several years. At this point, DOT has only budgeted to maintain the existing system…about $4.6M annually for the 38 DOT-sponsored sites. The 39 USCG and nine USACE sites provide safety-of-life service so their budgets are secure.
“High Accuracy NDGPS —
“The HA-NDGPS research program is sponsored by FHWA and FRA to enhance the performance of NDGPS. The first HA-NDGPS station began broadcasting in a test mode in 2001 with funding from the Interagency GPS Executive Board (IGEB). IGEB recognized the potential benefit to many Federal agencies, states, and the general public of having a nationwide high accuracy system. Two HA-NDGPS reference stations are currently operational and providing 10 to 15 cm accuracy throughout the coverage area. Further improvements to accuracy and the development of 1 to 2 second time-to-alarm integrity are anticipated. Once these improvements are complete, a HA-NDGPS standard will be developed.
“To support this, several approaches are being investigated. They can be grouped into three general categories: improved ionosphere and troposphere prediction; increased data throughput to support broadcast of GPS observables; and the addition of pertinent data to the current broadcast.”
EG Comment: The HA-NDGPS program is one that’s been around a long time. It’s a technology in search of an application. The growth of RTK networks threatens to render HA-NDGPS obsolete. An interesting rumor I heard is that DOT is considering streaming NTRIP data from NDGPS and possibly HA-NDGPS. Essentially, that means one could receive RTCM corrections over the internet via Wi-Fi, mobile phone networks, etc.) and eliminate the bulky and expensive beacon receivers required to use NDGPS today.
“Wide Area Augmentation System (WAAS) —
“WAAS, an SBAS operated by FAA, provides increased navigation accuracy, availability, and integrity for aircraft navigation during departure, en route, arrival, and approach operations. Although designed primarily for aviation applications, WAAS is widely available in receivers manufactured for navigation use by other communities.
“FAA commissioned WAAS in 2003. WAAS service supports departure, en route, arrival, and approach operations, including nonprecision approaches and approach procedures with vertical guidance. The WAAS service may support additional capabilities such as advanced arrival and departure procedures (curved and segmented), more efficient en route navigation and parallel runway operations, runway incursion warnings, high-speed turnoff guidance, and airport surface operations.
“WAAS will be modified to utilize the L5 signal provided by modernized GPS satellites, in lieu of the current semi-codeless L2 signal being utilized to determine ionospheric corrections. New dual-frequency WAAS avionics using L1 and L5 will improve the availability of LPV service.
EG Comment: Note that WAAS is bypassing L2C. It says something about the future of L2C and if it’s really needed. That’s another discussion altogether. Like GPS, WAAS, and SBAS in general is being used in many applications beyond its original intent. There are hundreds of thousands (several million if you include the consumer WAAS users) that outnumber by orders of magnitude the number of WAAS users in aviation.
“The U.S. Continuously Operating Reference Station (CORS) System —
“NOAA’s NGS, an element of DOC, has established a CORS system to support non-navigation post-processing applications of GPS, especially precise 3-dimensional positioning at the few centimeter level. More recently, the CORS network has also served the atmospheric science community as a tr
oposphere and ionosphere monitoring network, and it has served the geophysics community as a crustal motion monitoring network. Additionally, the CORS system is being modernized to serve as the foundation for future applications that support real and near real-time positioning (that differ from navigation applications by the lack of redundancy and integrity monitoring required for safety-of-life applications). The CORS system provides code range and carrier phase data from a nationwide network of GPS stations for access by the Internet.
“As of June 2008, data were being provided from more than 1,200 stations. The NGS manages and coordinates data contributions from GPS tracking stations established by more than 200 other groups rather than by building an independent network of reference stations. In particular, use is being made of data from stations operated by components of DOT and DHS that support real-time navigation requirements (mostly WAAS and NDGPS augmentations). These real-time stations make up approximately 17 percent of all CORS stations. Other stations currently contributing data to CORS include stations operated by NOAA, NSF, and NASA in support of crustal motion activities; stations operated by state and local governments in support of surveying and mapping applications; and stations operated by NOAA’s Earth Systems Research Laboratory, in support of meteorological applications. The breakdown of CORS partners is illustrated in Figure 5-1.
“The national CORS system is a GPS augmentation system managed by NOAA that archives and distributes GPS data for precision positioning and atmospheric modeling applications. It serves as the basis for the National Spatial Reference System, defining high accuracy coordinates for all Federal radionavigation systems. Historically, CORS served postprocessing users of GPS, but is being modernized to support real-time users at a similar level of accuracy.”
EG Comment: What can you say about the CORS system other than that it’s a model for other CORS systems around the world. It says something about the success of the program in that it’s allocated an entire page in the FRP.
Phew, there’s more in the FRP I could quote and discuss but I’ve touched on the major items. Hopefully, this gives you an idea of what the USG thinks about when it makes strategic and tactical decisions about the GPS program. However, keep in mind that in many cases policy and budget don’t match, and if there’s a conflict between the two, budgets usually win.
The Russian space agency Roscosmos launched a venerable Proton rocket carrying three GLONASS-M satellites into orbit on December 14. Each 3,000-pound satellite is designed to last seven years. They join a constellation numbering 19 satellites, although only 16 are healthy.
Russian politicians and satnav system managers had hoped to launch six satellites between September and December, to attain a global service level, which requires 24 satellites, eight each in three orbital planes.
However, a payload glitch found aboard one recent satellite after its launch into space forced a return to the factory of three satellites scheduled for launch in September. The three put into orbit this week will now only bolster continuing GLONASS coverage of Russian sovereign territory, which requires 18 operating spacecraft.
The next GLONASS launch is now scheduled for a February 11–20, 2010, window.
The Block 41 GLONASS-M satellites (Nos. 30, 33, and 34) have been placed in Plane 1, which currently has only four healthy satellites. According to Roscosmos, communication has been established with all of the satellites and performance is nominal.
Next Up. Nikolay Testoedov, head of the Reshetnev satellite manufacturing company, said his enterprise plans to produce 17 more GLONASS-M satellites between now and 2013.
“The preproduction flight tests of new series of GLONASS satellites, GLONASS-K, will start in 2011,” said Andrei Buravin, vice head of Russian Institute of Space Device Engineering. The preproduction flight tests of GLONASS-K will be performed together with Reshetnev company.
It is still unclear whether the next-generation of GLONASS satellites will be launched via blocks of three satellites with Proton rockets from Baikonur, or via blocks of two satellites with Soyuz rockets from Plesetsk.
RTCM Supports Loran
It may be moot by the time you read this — the U.S. Coast Guard (USCG) could unplug Loran on January 4 — but the Radio Technical Commission for Maritime Services (RTCM) wrote to Secretary of Homeland Security Janet Napolitano in support of continuing and enhancing Loran service.
The letter asserts that it cannot be accurately certified that termination of the operation of the Loran-C signal will not adversely affect the safety of maritime navigation — counter to opinion issued by the USCG Commandant. The RTCM president states that the Loran-C infrastructure is needed to complete the eLoran system to serve as a backup to the U.S. Global Positioning System (GPS).
New Technique. Researchers have developed a technique to demonstrate a low-cost backward-compatible way to exploit eLoran to make GPS more robust. The method paves a way for the average GPS user to become a GPS+eLoran user. Go to env-gpsworld-integration.kinsta.cloud/loran for the letter and other Loran stories.
Galileo Contract Award Imminent
A contract award for at least eight of the in-orbit validation satellites had been promised for the end of this year by the European Commission (EC), but as this magazine goes to press on December 16, no official announcement has surfaced.
An unconfirmed report in early December claimed that the European Commission and European Space Agency had awarded a contract for eight Galileo satellites to underdog bidder OHB Technology of Germany. However, this report was privately denied and in fact refuted by an EC representative.
The OHB-led consortium includes small-satellite specialist Surrey Satellite Technology Ltd. of Britain, which built and continues to operate the GIOVE-A satellite, Galileo’s first launch. The competing Astrium-Thales Alenia consortium built the second Galileo satellite now in orbit, GIOVE-B.
The report, published on December 4 on the Space News website, asserted that “the European Commission has selected OHB Technology of Germany to build at least eight Galileo navigation and positioning satellites for about 350 million euros ($525 million) in a decision that postpones any award to competitor Astrium Satellites pending further negotiations with Astrium.” Reporter Peter de Selding cites industry officials as his sources.
An EC representative privately denied the report, asserting “it is not true.” An industry source said “It is not confirmed, we are waiting for the decision.”
The rumor created an uproar in the German state of Bavaria, a center for that country’s aerospace industry and government-aided research. Astrium had reportedly planned to perform much of its Galileo work in that region, and the Space News story holds out the expectation that “political pressure will be applied to reverse the ruling in the coming days.” The region is already home to the Galileo Control Center at a German Aerospace Agency (DLR) site.
Block Approach. The two consortia have been negotiating their bids on the contract with the commission and its technical adviser, the European Space Agency (ESA), for 15 months. Initially, the two European Union bodies set a contract ceiling of 840 million euros to build 28 Galileo satellites; un the past few months they revised the total order to 22 satellites and asked for bids for eight, 14, and 22 satellites. Reportedly, there are price ceilings for each of the three potential order sizes — around 400 million euros for eight satellites, 650 million euros for 14 satellites, and 840 million euros for all 22.
Repeatedly postponed throughout its conceptual phase, the Galileo system now — officially, at least — hopes to achieve initial operational capability by 2014.
Whether or not the Space News report is eventually substantiated, the central European government has already signaled in multiple ways its dissatisfaction with its various member states’ aerospace industry giants, whom it holds responsible for the protracted dysfunctionality of the now-abandoned public-private partnership to build Galileo. The EC has largely wrested control of the satellite award process away from its space agency, and indicated that it intends to maintain a firm grip on the purse strings.
Application Days: Galileo Application Days are set for March 3–5, 2010, in Brussels, Belgium, with live demonstrations of cutting-edge applications developed for GNSS under the European Union’s 7th Research Framework Programme (FP7), former ESNC Competitions, the ESA Technology Transfer Programme, and national and regional initiatives. See www.application-days.eu for details.
Roughly three years ago, the U.S. military conducted the first flex-power test on the L2 GPS codeless signal. Almost immediately, the civilian GPS community expressed concern that future changes to the L2P(Y) signal power levels might cause a signal phase shift; such a phase shift would be incompatible with equipment using the P(Y) signals in a codeless/semicodeless fashion for extremely accurate positioning applications.
Civilian users were naturally upset because they had invested millions of dollars in systems that might not be usable — even if the unusable periods were of a very short duration.
The National Positioning, Navigation, and Timing (PNT) Executive Committee responded by tasking the National PNT Engineering Forum (NPEF) to look at the problem. Within a few months, the NPEF announced a solution: flex power could be used in such a manner that it would not cause a phase shift. At the same time, the military reminded civilian users that the codeless use of L2P(Y), as accurate as it might be, was never intended and should not be a long-term solution.
An agreement was reached between the U.S. government and civilian users that the civilian users of this codeless/semicodeless technique would migrate from using the L2P(Y) carrier to using the new L2C signal to achieve not only the same, but better results. To codify this agreement, a Federal Register Notice was issued in 2008 identifying the terms of this agreement, which guaranteed the phase stability of the current L2P(Y) signal until 2020. This gives civilian users 12 years to figure out a migration plan and to obtain adequate use of the equipment they already have on hand.
In addition, 2020 is not a drop-dead date, but a date when the use of L2P(Y) codeless signals will no longer be guaranteed, though may well still work. Who knows what PNT advancements will take place between now and then? This could very well be a moot point by then, and in my opinion should be one now.
Problem Solved? Apparently not. A lag between the issuance of this national policy and analogous adjustments to interface specifications caused consternation within the civilian community. Misunderstandings added to this perceived impasse. Various solutions were identified to work around this looming quandary. However, given the national policy to support codeless/semicodeless use until 2020, the Air Force Space Command commitment to that policy, and the recommendations of the NPEF, these solutions seem wholly unnecessary to me.
The U.S. government has gone well beyond what is required to insure civilian codeless and semi-codeless users are accommodated.
For the foreseeable future, users will be able to employ L2P(Y) codeless/semicodeless techniques for very accurate position determination and will not have to worry about phase shifts disrupting their work.
— Don Jewell, GPS World Defense PNT Contributing Editor
Enhancing GNSS Receiver Sensitivity by Combining Signals from Multiple Satellites
By Penina Axelrad, James Donna, Megan Mitchell, and Shan Mohiuddin
A new approach to enhancing signal sensitivity combines the received signal power from multiple satellites in a direct-to-navigation solution.
INNOVATION INSIGHTS by Richard Langley
ALTHOUGH I HAVE MANAGED the Innovation column continuously since GPS World’s first issue, it wasn’t until the second issue that I authored a column article. That article, co-written with Alfred Kleusberg, was titled “The Limitations of GPS.” It discussed some of the then-current problems of GPS, including poor signal reception, loss of signal integrity, and limited positioning accuracy.
In the ensuing 20 years, both signal integrity and positioning accuracy have improved significantly. Advances in the GPS control segment’s capabilities to continuously monitor and assess signal performance, together with receiver-autonomous integrity monitoring and integrity enhancement provided by augmentation systems, have reduced worries about loss of signal integrity. The removal of Selective Availability and use of error corrections provided by augmentation systems, among other approaches, have improved positioning accuracy.
But the problem of poor reception due to weak signals is still with us. In that March/April 1990 article, we wrote “[GPS] signals propagate from the satellites to the receiver antenna along the line of sight and cannot penetrate water, soil, walls, or other obstacles very well. … In surface navigation and positioning applications, the signal can be obstructed by trees, buildings, and bridges. … [In] the inner city streets of urban areas lined with skyscrapers, the ‘visibility’ of the GPS satellites is very limited. In such areas, the signals can be obstructed for extended periods of time or even [be] continuously unavailable.”
Poor signal reception in other than open-sky environments is still a problem with conventional GPS receivers. However, extending signal integration times and using assisted-GPS techniques can give GPS some degree of capability to operate indoors and in other restricted environments, albeit typically with reduced positioning accuracy. An antenna with sufficient gain is needed and capable systems are available on the market. The pilot channels of modernized GNSS signals will also benefit signal acquisition and tracking in challenging environments.
In this month’s column, we look at a completely different approach to enhancing signal sensitivity. Rather than requiring each satellite’s signal to be acquired and tracked before it can be used in the navigation solution, the new approach — dubbed “collective detection” — combines the received signal power from multiple satellites in a direct-to-navigation-solution procedure. Besides providing a quick coarse position solution with weak signals, this approach can be used to monitor the signal environment, aid deeply-coupled GPS/inertial navigation, and assist with terrain and feature recognition.
“Innovation” features discussions about advances in GPS technology, its applications, and the fundamentals of GPS positioning. The column is coordinated by Richard Langley, Department of Geodesy and Geomatics Engineering, University of New Brunswick.
Growing interest in navigating indoors and in challenging urban environments is motivating research on techniques for weak GPS signal acquisition and tracking. The standard approach to increasing acquisition and tracking sensitivity is to lengthen the coherent integration times, which can be accomplished by using the pilot channels in the modernized GPS signals or by using assisted GPS (A-GPS) techniques. These techniques operate in the traditional framework of independent signal detection, which requires a weak signal to be acquired and tracked before it is useful for navigation. This article explores a complementary, but fundamentally different, approach that enhances signal sensitivity by combining the received power from multiple GPS satellites in a direct-to-navigation-solution algorithm. As will be discussed in the following sections, this collective detection approach has the advantage of incorporating into the navigation solution information from signals that are too weak to be acquired and tracked, and it does so with a modest amount of computation and with no required hardware changes. This technology is appropriate for any application that requires a navigation solution in a signal environment that challenges traditional acquisition techniques. Collective detection could be used to monitor the signal environment, aid deeply coupled GPS/INS during long outages, and help initiate landmark recognition in an urban environment. These examples are explained further in a subsequent section. In order to understand how the collective detection algorithm works, it is instructive to first consider the traditional approach to acquisition and tracking.
Acquisition Theory and Methods
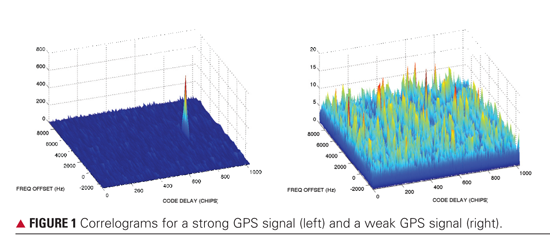
In a typical stand-alone receiver, the acquisition algorithm assesses the signal’s correlation power in discrete bins on a grid of code delay and Doppler frequency (shift). The correlation calculations take the sampled signal from the receiver’s RF front end, mix it with a family of receiver-generated replica signals that span the grid, and sum that product to produce in-phase (I) and quadrature (Q) correlation output. The correlation power is the sum of the I and Q components, I2 + Q2. Plotting the power as a function of delay and frequency shift produces a correlogram, as shown in FIGURE 1. It should be noted that both correlation power and its square root, the correlation amplitude, are found in the GPS literature. For clarity, we will always use the correlation power to describe signal and noise values.
If a sufficiently powerful signal is present, a distinct peak appears in the correlogram bin that corresponds to the GPS signal’s code delay and Doppler frequency. If the peak power exceeds a predefined threshold based on the integration times and the expected carrier-to-noise spectral density, the signal is detected. The code delay and Doppler frequency for the peak are then passed to the tracking loops, which produce more precise measurements of delay — pseudoranges — from which the receiver’s navigation solution is calculated. When the satellite signal is attenuated, however, perhaps due to foliage or building materials, the correlation peak cannot be distinguished and the conventional approach to acquisition fails.
The sensitivity of traditional tracking algorithms is similarly limited by the restrictive practice of treating each signal independently. More advanced tracking algorithms, such as vector delay lock loops or deeply integrated filters, couple the receiver’s tracking algorithms and its navigation solution in order to take advantage of the measurement redundancy and to leverage information gained from tracking strong signals to track weak signals. The combined satellite detection approach presented in this article extends the concept of coupling to acquisition by combining the detection and navigation algorithms into one step.
Collective Detection
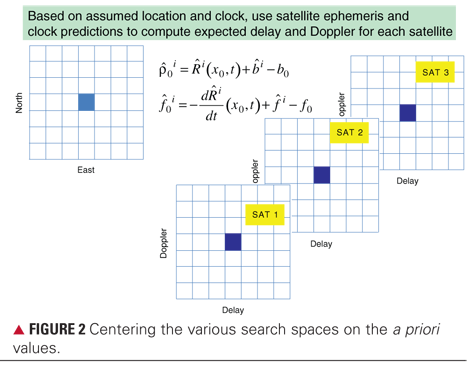
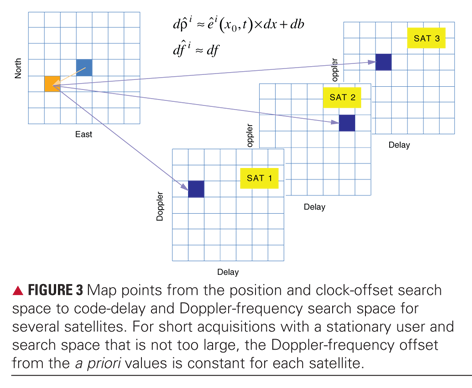
In the collective detection algorithm, a receiver position and clock offset grid is mapped to the individual GPS signal correlations, and the combined correlation power is evaluated on that grid instead of on the conventional independent code delay and Doppler frequency grids. The assessment of the correlation power on the position and clock offset grid leads directly to the navigation solution. The mapping, which is key to the approach, requires the receiver to have reasonably good a priori knowledge of its position, velocity, and clock offset; the GPS ephemerides; and, if necessary, a simplified ionosphere model. Given this knowledge, the algorithm defines the position and clock offset search grid centered on the assumed receiver state and generates predicted ranges and Doppler frequencies for each GPS signal, as illustrated in FIGURE 2. The mapping then relates each one of the position and clock offset grid points to a specific code delay and Doppler frequency for each GPS satellite, as illustrated in FIGURE 3. Aggregating the multiple delay/Doppler search spaces onto a single position/clock offset search space through the mapping allows the navigation algorithm to consider the total correlation power of all the signals simultaneously. The correlation power is summed over all the GPS satellites at each position/clock-offset grid point to create a position domain correlogram. The best position and clock-offset estimates are taken as the grid point that has the highest combined correlation power. This approach has the advantage of incorporating into the position/clock-offset estimate information contained in weak signals that may be undetectable individually using traditional acquisition/tracking techniques.
It should be noted that a reasonable a priori receiver state estimate restricts the size of the position and clock-offset grid such that a linear mapping, based on the standard measurement sensitivity matrix used in GPS positioning, from the individual signal correlations, is reasonable. Also, rather than attempt to align the satellite correlations precisely enough to perform coherent sums, noncoherent sums of the individual satellite correlations are used. This seems reasonable, given the uncertainties in ranging biases between satellites, differences and variability of the signal paths through the ionosphere and neutral atmosphere, and the large number of phases that would have to be aligned.
Applications
The most obvious application for collective detection is enabling a navigation fix in circumstances where degraded signals cause traditional acquisition to fail. The sweet spot of collective detection is providing a rapid but coarse position solution in a weak signal environment. The solution can be found in less time because information is evaluated cohesively across satellites. This is especially clear when the algorithm is compared to computationally intensive long integration techniques.
There are several ways that collective detection can support urban navigation. This capability benefits long endurance users who desire a moderate accuracy periodic fix for monitoring purposes. In some circumstances, the user may wish to initiate traditional tracking loops for a refined position estimate. However, if the signal environment is unfavorable at the time, this operation will waste valuable power. The collective detection response indicates the nature of the current signal environment, such as indoors or outdoors, and can inform the decision of whether to spend the power to transition to full GPS capabilities.
In urban applications, deeply integrated GPS/INS solutions tolerate GPS outages by design. However, if the outage duration is too long, the estimate uncertainty will eventually become too large to allow conclusive signal detection to be restored. Running collective detection as a background process could keep deeply integrated filters centered even in long periods of signal degradation. Because collective detection approaches the acquisition problem from a position space instead of the individual satellite line-of-sight space, it provides inherent integrity protection. In the traditional approach, acquiring a multipath signal will pollute the overall position fix. In collective detection, such signals are naturally exposed as inconsistent with the position estimate.
Another use would be to initialize landmark correlation algorithms in vision navigation. Landmark correlation associates street-level video with 3D urban models as an alternative to (GPS) absolute position and orientation updates. This technique associates landmarks observed from ground-level imagery with a database of landmarks extracted from overhead-derived 3D urban models. Having a coarse position (about 100 meters accuracy) enhances initialization and restart of the landmark correlation process. Draper Laboratory is planning to demonstrate the utility of using collective detection to enable and enhance landmark correlation techniques for urban navigation.
In all of these applications, collective detection is straightforward to implement because it simply uses the output of correlation functions already performed on GPS receivers.
Simulations and Processing
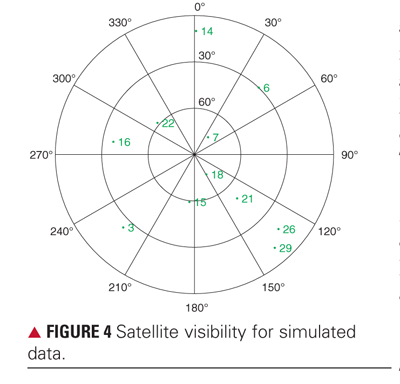
The new algorithm has been tested using live-sky and simulated data collected by a Draper Laboratory wideband data recorder. A hardware GPS signal simulator was used to simulate a stationary observer receiving 11 equally powered GPS signals that were broadcast from the satellite geometry shown in FIGURE 4. The data recorder and the signal simulator were set up in a locked-clock configuration with all of the simulator’s modeled errors set to zero. No frequency offsets should exist between the satellites and the receiver. A clock bias, however, does exist because of cable and other fixed delays between the two units. The data recorder houses a four-channel, 14-bit A/D module. It can support sample rates up to 100 MHz. For this work, it was configured to downconvert the signal to an IF of 420 kHz and to produce in-phase and quadrature samples at 10 MHz.
Results and Discussion
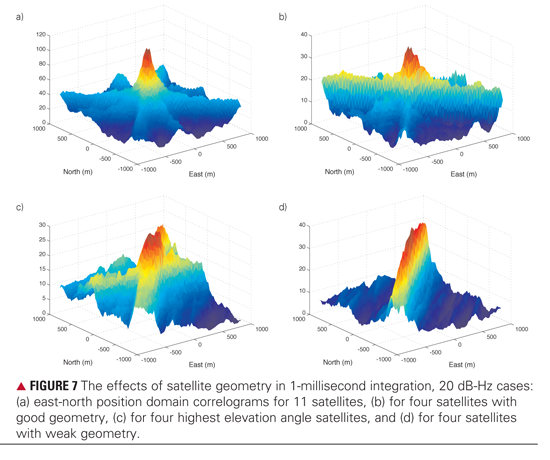
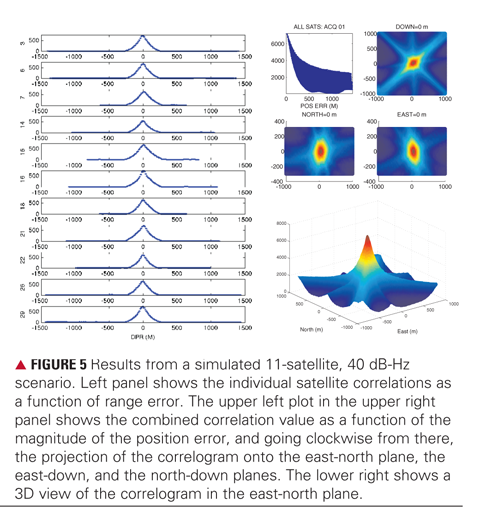
To combine satellites, a position domain search space is established, centered on the correct location and receiver clock bias. A grid spacing of 30 meters over a range of ± 900 meters in north and east directions, and ± 300 meters in the vertical. In the first simulated example, the correlation power for all the satellites is summed on the position grid using a single 1-millisecond integration period. In this case, the true carrier-to-noise-density ratio for each signal is 40 dB-Hz. The results are shown in FIGURE 5. The plots in the left panel show the individual signal correlations as a function of range error. The four plots in the upper-right panel show several views of the combined correlation as a function of position error. The upper-left plot in the panel shows the correlation value as a function of the magnitude of the position error. The upper-right plot shows the correlation as a function of the north-east error, the lower-left the north-down error, and the lower-right the east-down error. Notice how the shape of the constant power contours resembles the shape of the constant probability contours that would result from a least-squares solution’s covariance matrix. The final plot, the bottom-right panel, shows a 3D image of the correlation power as a function of the north-east error. It is clear in these images that in the 40 dB-Hz case each satellite individually reaches the highest correlation power in the correct bin and that the combined result also peaks in the correct bin. In the combined satellite results, each individual satellite’s correlation power enters the correlogram as the ridge that runs in a direction perpendicular to the receiver-satellite line-of-sight vector and represents a line of constant pseudorange.
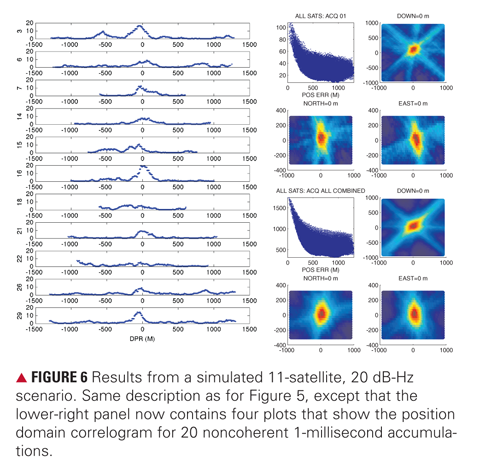
FIGURE 6 shows a similar set of graphs for a simulator run at 20 dB-Hz. The plots in the left panel and the four plots in the upper-right panel show the individual and combined correlations, as in Figure 5. In the lower-right panel, the 3D image has been replaced with correlations calculated using 20 noncoherent 1-millisecond accumulations. The indistinct peaks in many of the individual correlations (left panel) suggest that these signals may not be acquired and tracked using traditional methods. Those signals, therefore, would not contribute to the navigation solution. Yet in the combined case, those indistinct peaks tend to add up and contribute to the navigation solution. These results indicate the feasibility of using the information in weak signals that may not be detectable using traditional methods and short acquisition times. The situation is further improved by increasing the number of noncoherent integration periods.
Impact of Reduced Geometry. Of course, it is a bit unrealistic to have 11 satellites available, particularly in restricted environments, so we also considered three subsets of four-satellite acquisitions, under the same signal levels. FIGURE 7 compares the position domain correlograms for the following 20 dB-Hz cases: (1) a good geometry case (PRNs 3, 14, 18, 26), (2) an urban canyon case where only the highest 4 satellites are visible (PRNs 15, 18, 21, 22), and (3) a weak geometry case where just a narrow wedge of visibility is available (PRNs 18, 21, 26, 29). As expected, the correlation power peak becomes less distinct as the satellite geometry deteriorates. The pattern of degradation, morphing from a distinct peak to a ridge, reveals that the position solution remains well constrained in some directions, but becomes poorly constrained in others. Again, this result is expected and is consistent with the behavior of conventional positioning techniques under similar conditions.
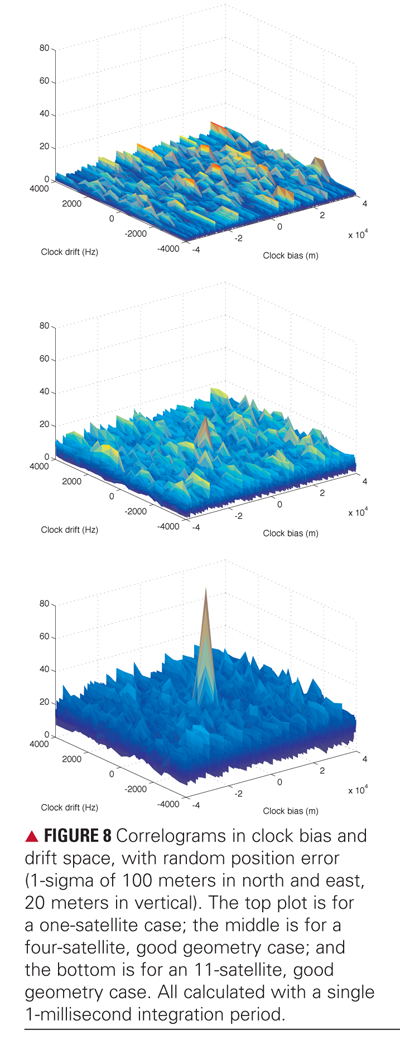
Focusing on Clock Errors. In some real-world situations, for example, a situation where a receiver is operating in an urban environment, it is possible for the position to be fairly well known, but the clock offset and frequency to have substantial uncertainty. FIGURE 8 shows how the combined satellites approach can be used to improve sensitivity when viewed from the clock bias and frequency domain. The figure presents example 1-millisecond correlograms of clock bias and clock drift for three 20 dB-Hz cases: (1) a single GPS satellite case; (2) a four-satellite, good geometry case; and (3) an 11-satellite, good geometry case. The assumed position solution has been offset by a random amount (generated with a 1-sigma of 100 meters in the north and east components, and 20 meters in the up component), but no individual satellite errors are introduced. These plots clearly show the improved capability for acquisition of the clock errors through the combining process.
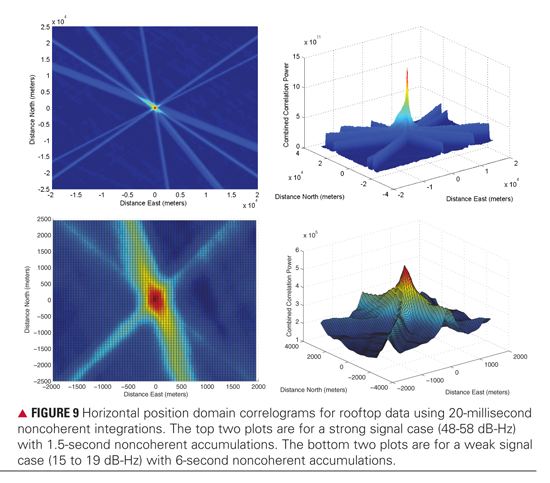
Live Satellite Signals. FIGURE 9 shows combined correlograms derived from real data recorded using an outdoor antenna. The first example includes high-signal-level satellites with 1.5-second noncoherent integration. The second example includes extremely attenuated satellite signals with a long noncoherent integration period of six seconds.
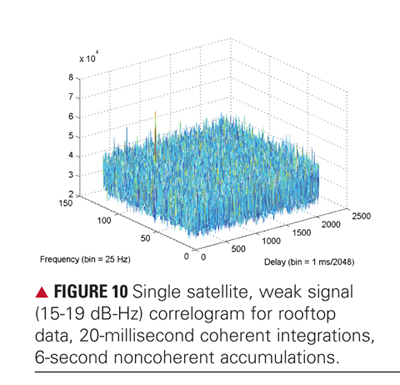
The plots in the upper-left and upper-right panels show combined correlograms as a function of the north-east position error for satellite signals with carrier-to-noise-density ratios of 48 dB-Hz or higher. The plots in the lower-left and lower-right panels show combined correlograms resulting from much weaker satellites with carrier-to-noise-density ratios of roughly 15 to 19 dB-Hz, using a coherent integration interval of 20 milliseconds and a noncoherent interval of six seconds. FIGURE 10 shows one of the individual single-satellite correlograms. In this attenuated case, the individual satellite power levels are just barely high enough to make them individually detectable. This is the situation in which collective detection is most valuable.
Conclusions
The example results from a hardware signal simulator and live satellites show how the noncoherent combination of multiple satellite signals improves the GPS position error in cases where some of the signals are too weak to be acquired and tracked by traditional methods. This capability is particularly useful to a user who benefits from a rapid, but coarse, position solution in a weak signal environment. It may be used to monitor the quality of the signal environment, to aid deeply coupled navigation, and to initiate landmark recognition techniques in urban canyons. The approach does require that the user have some a priori information, such as a reasonable estimate of the receiver’s location and fairly accurate knowledge of the GPS ephemerides. Degradation in performance should be expected if the errors in these models are large enough to produce pseudorange prediction errors that are a significant fraction of a C/A-code chip. Absent that issue, the combined acquisition does not add significant complexity compared to the traditional approach to data processing. It can be used to enhance performance of existing acquisition techniques either by improving sensitivity for the current noncoherent integration times or by reducing the required integration time for a given sensitivity. Further development and testing is planned using multiple signals and frequencies.
Acknowledgments
The authors appreciate the contributions of David German and Avram Tewtewsky at Draper Laboratory in collecting and validating the simulator data; Samantha Krenning at the University of Colorado for assistance with the simulator data analysis and plotting; and Dennis Akos at the University of Colorado for many helpful conversations and for providing the Matlab software-defined radio code that was used for setting up the acquisition routines. This article is based on the paper “Enhancing GNSS Acquisition by Combining Signals from Multiple Channels and Satellites” presented at ION GNSS 2009, the 22nd International Technical Meeting of the Satellite Division of The Institute of Navigation, held in Savannah, Georgia, September 22–25, 2009.
The work reported in the article was funded by the Charles Stark Draper Laboratory Internal Research and Development program.
Manufacturers
Data for the analyses was obtained using a Spirent Federal Systems GSS7700 GPS signal simulator and a GE Fanuc Intelligent Platforms ICS-554 A/D module.
PENINA AXELRAD is a professor of aerospace engineering sciences at the University of Colorado at Boulder. She has been involved in GPS-related research since 1986 and is a fellow of The Institute of Navigation and the American Institute of Aeronautics and Astronautics.
JAMES DONNA is a distinguished member of the technical staff at the Charles Stark Draper Laboratory in Cambridge, Massachusetts, where he has worked since 1980. His interests include GNSS navigation in weak signal environments and integrated inertial-GNSS navigation.
MEGAN MITCHELL is a senior member of the technical staff at the Charles Stark Draper Laboratory. She is involved with receiver customization for reentry applications and GPS threat detection.
SHAN MOHIUDDIN is a senior member of the technical staff at the Charles Stark Draper Laboratory. His interests include GNSS technology, estimation theory, and navigation algorithms.
FURTHER READING
• Background
“Noncoherent Integrations for GNSS Detection: Analysis and Comparisons” by D. Borio and D. Akos in IEEE Transactions on Aerospace and Electronic Systems, Vol. 45, No. 1, January 2009, pp. 360–375 (doi: 10.1109/TAES.2009.4805285).
“Impact of GPS Acquisition Strategy on Decision Probabilities” by D. Borio, L. Camoriano, and L. Lo Presti in IEEE Transactions on Aerospace and Electronic Systems, Vol. 44, No. 3, July 2008, pp. 996–1011 (doi:10.1109/TAES.2008.4655359).
“Understanding the Indoor GPS Signal” by T. Haddrell and A.R. Pratt in Proceedings of ION GPS 2001, the 14th International Technical Meeting of the Satellite Division of The Institute of Navigation, Salt Lake City, Utah, September 11–14, 2001, pp. 1487–1499.
“The Calculation of the Probability of Detection and the Generalized Marcum Q-Function” by D.A. Shnidman in IEEE Transactions on Information Theory, Vol. 35, No. 2, March 1989, pp. 389–400 (doi: 10.1109/18.32133).
• Weak Signal Acquisition and Tracking
“Software Receiver Strategies for the Acquisition and Re-Acquisition of Weak GPS Signals” by C. O’Driscoll, M.G. Petovello, and G. Lachapelle in Proceedings of The Institute of Navigation 2008 National Technical Meeting, San Diego, California, January 28-30, 2008, pp. 843–854.
“Deep Integration of Navigation Solution and Signal Processing” by T. Pany, R. Kaniuth, and B. Eissfeller in Proceedings of ION GNSS 2005, the 18th International Technical Meeting of the Satellite Division of The Institute of Navigation, Long Beach, California, September 13–16, 2005, pp. 1095–1102.
“Deeply Integrated Code Tracking: Comparative Performance Analysis” by D. Gustafson and J. Dowdle in Proceedings of ION GPS 2003, the 16th International Technical Meeting of the Satellite Division of The Institute of Navigation, Portland, Oregon, September 9–12, 2003, pp. 2553–2561.
“Block Acquisition of Weak GPS Signals in a Software Receiver” by M.L. Psiaki in Proceedings of ION GPS 2001, the 14th International Technical Meeting of the Satellite Division of The Institute of Navigation, Salt Lake City, Utah, September 11–14, 2001, pp. 2838–2850.
• General Combining Techniques
“Coherent, Non-Coherent, and Differentially Coherent Combining Techniques for the Acquisition of New Composite GNSS Signals” by D. Borio, C. O’Driscoll, and G. Lachapelle, in IEEE Transactions on Aerospace and Electronic Systems, Vol. 45, No. 3, July 2009, pp. 1227–1240.
“Comparison of L1 C/A-L2C Combined Acquisition Techniques” by C. Gernot, K. O’Keefe, and G. Lachapelle in Proceedings of the European Navigation Conference ENC-GNSS 2008, Toulouse, France, April 23–25, 2008, 9 pp.
Performance Analysis of the Parallel Acquisition of Weak GPS Signals by C. O’Driscoll, Ph.D. dissertation, National University of Ireland, Cork, 2007; available on line: <http://plan.geomatics.ucalgary.ca/papers/phd_thesis_cillian_odriscoll_jan07.pdf>.
• Coherent Combining of Signals from Multiple Satellites
“GPS PRN Code Signal Processing and Receiver Design for Simultaneous All-in-View Coherent Signal Acquisition and Navigation Solution Determination” by R. DiEsposti in Proceedings of The Institute of Navigation 2007 National Technical Meeting, San Diego, California, January 22–24, 2007, pp. 91–103.
This magazine, the very one you hold in your hand or peruse digitally, hereby celebrates its 20th birthday. Hooray!
Since its inception in 1989 and first appearance in the public eye in 1990, GPS World has provided — and continues to provide — technical and business information on global navigation satellite systems (GNSS) to engineers, product designers, manufacturers, researchers, system developers, executives, and high-level managers around the world who incorporate global positioning, navigation, and timing (PNT) technologies into their corporate strategies, operations, and product offerings to maximize profit and performance.
Many things have changed since our birth: changes in the world, changes in GPS itself and now in GNSS, and changes in this magazine.
The book has repositioned itself over the years from its early focus on applications to the present comprehensive yet detailed grasp of design concepts at both the space system and integrated circuit level.
We can still say, as Glen Gibbons wrote in the inaugural issue, “Perhaps the most remarkable thing about GPS today is the enthusiasm that we find
everywhere among people involved with the field. We want to share that enthusiasm with our readers. GPS — our world and welcome to it.”
Double-Decade Insights
Richard Langley: in the fall of 1989, GPS World’s founding editor, Glen Gibbons, approached Dave Wells, Alfred Kleusberg, and me — faculty members in the then Department of Surveying Engineering at the University of New Brunswick — about editing a “technology/product development column” in a new magazine. Since readers would have marked differences in their knowledge and expertise in the GPS area, “the column should deal with issues that have broad application and interest and are presented in terms that are accessible to as wide a range of readers as possible,” he wrote. The column was to be called simply Innovation.
We decided that Alfred Kleusberg and I would manage the column, with Dave Wells serving as one of the inaugural members of the magazine’s Editorial Advisory Board. I took over sole responsibility for the column in 1997.
Many Innovation columns have been tutorials including the one in the very first issue of the magazine. Written by Dave Wells and Alfred Kleusberg and titled “GPS: A Multipurpose System,” it used three different positioning scenarios to explain how GPS could provide positioning accuracies all the way from a Selective Availability-constrained 100 meters down to the sub-centimeter level. It also outlined GPS’s ability to determine platform attitude with multiple antennas and its use for accurate time transfer.
The Innovation column has run continuously in every issue of the magazine except for August and December, when it gives way to the Almanac GNSS information pages. Next April’s column will be the 200th!
Ed Aster, Founding Publisher: 20 Years Ago, GPS World almost didn’t happen. The idea of a magazine focussed on an unknown technology shrouded in military guise was turned down by 10 publishers before the idea was thrown at me while developing our international offices in Chester, England. It immediately made sense, as long as you had long eyes. A technology that has changed the world almost as much as the invention of the telephone. Who woulda thought. GPS leads the world and allows all countries to benefit from its quite simple premise, “Where am I?”
GPS World: That Was Then
During the last decade of the 20th century, the U.S. Global Positioning System achieved full operational capability. Prior to and after that key 1995 event, the technology saw active use and growth, primarily in the fields of surveying, mapping, and high-precision positioning. The technology most often took the form of a GPS receiver, frequently a stand-alone box, although active research and development into smaller form factors and integration with other technologies began.
A 1996 Presidential Decision Directive reiterated GPS’ global availability for peaceful use. Russia’s GLONASS became irregularly active.
Marking the practical — that is, the true — start of the GNSS era, the first integrated GPS+GLONASS RTK surveying system appeared in 1997: the GG-24 from Ashtech. The first GPS IIR (for replenishment) satellite rose that year, proving that satnav was not only here to stay, but to improve.
Europe’s Galileo became a topic of earnest discussion.
Double-Decade Insights
Jules McNeff: Twenty Years ago, GPS was just a promise. The first Block II satellite was not yet a year old. GPS was known to only a few. It had not contributed to victory on the battlefield; it had not revolutionized earth science nor changed the way businesses and people conduct their daily activities. Now it has done all of that. It has awakened a global awareness of precise and ubiquitous position and time and of their value as essential elements of every human endeavor.
I look forward to its next 20 years with the same anticipation and excitement I felt then.
Gerard Lachapelle: The Launch of the Block II satellites, starting in February 1989 after a hiatus of more than three years, was the most remarkable, exciting news of the time. By January 1990, six satellites had been launched with four more to come throughout 1990, an impressive accelerated schedule that had a major impact on equipment manufacturers, technology, performance, and users. It accelerated investments in research and development, and in long-term planning of major users and suppliers of positioning services.
GPS would be a reality! The world has never been the same since!
First Advertisers
These companies advertised in the inaugural January 1990 issue — and we thank them!
Three Full Pages
Ashtech
Two Full Pages
Trimble
Full Page
McDonnell Douglas
Magellan
Geodimeter
Wild Leitz
Interstate Electronics Corp.
Ball Aerospace
Oscilloquartz
Navstar
Stanford Telecom
Plessey/ITT
GE Astro Space
Odetics
CAST
ITT Defense
Fractional Ads: Holden GPS, Sensor Systems, Racal, Alcatel, FTS/Austron, Allen Osborne Associates, Datum, McIntosh & McIntosh, Intermetrics, Piezo Crystal, Van Martin Systems, Navtech Seminars, GEOSurv.
Map these companies onto their present names/ownership and enter to win the editor’s Happy Anniversary to Us Prize! Send your answers to [email protected].
GPS World: This is Now
During the first decade of the 21st century, the GPS industry entered early maturity and saw action in an ever-increasing number of fields: avionics, transportation, wireless communication, burgeoning consumer devices, and location-based services. Emphasis in product design shifted to the board and chip level, and GPS chips began “disappearing inside the application,” going inside other boxes fo
r integration with other technologies.
GLONASS declined, then rose again; Galileo got underway in fits and starts; international regional augmentations began.
GPS World held its first Summit for 1001 GNSS VIPs with a top-level panel during the 2002 ION-GNSS conference, and a second Summit in 2004. It became the Leadership Dinner in 2006, with a Great Debate in 2007, a GNSS Election in 2008, and Brad Parkinson’s “True History of the Origins of GPS” in 2009. In each case, proceedings were subsequently shared with all our readers.
The magazine became more than a magazine, redesigning its website to track developments in ever-diverging industry sectors, and launching e-mail newsletters focused on these specialized interests, followed by discussion forums, webinars, video interviews, job listings, and more.
Double-Decade Insights
Vidal Ashkenazi: As a geodesist, I consider GPS as the natural follow-on to satellite triangulation-trilateration and Transit Doppler (in the 1960s), when navigation and timing were added to straight positioning, and geodetic concepts of accuracy and reliability (renamed integrity) were adopted. We still had some difficulties in convincing the navigation community of the need to adopt a precise geodetic coordinate system (like WGS84), instead of just latitudes and longitudes.
The imposition of Selective Availability led civilian ingenuity to come up with differential GPS, carrier-phase, and RTK. Who could have predicted in the 1990s that countless GPS applications would develop, benefiting business, governments and citizens everywhere?
Stephen Colwell: I started GPS World back in 1989. With a $1,200 investment and business plan in hand, I struggled through 43 investor presentations until finally receiving an approval nod for funds to launch the magazine. What I remember most during these times was invariably a potential investor would say “Now explain this to me again — what is GPS, and why does it need a magazine?”
LONG HAULERS
These memoirs come from founding members of our Editorial Advisory Board who still serve in that capacity! Jules McNeff is now vice president, strategy and programs, Overlook Systems Technologies; Gérard Lachapelle is professor and CRC/iCORE chair in wireless location, Department of Geomatics Engineering, University of Calgary; Vidal Ashkenazi is CEO, Nottingham Scientific Ltd. Other advisors still on board from that first issue are Paul Cross, Larry Hothem, William Klepczynski, Keith McDonald, and Brad Parkinson.Richard Langley is, as ever, a professor of geodesy and geomatics at the University of New Brunswick; Ed Aster is a vineyard owner and entrepreneur in New Zealand; Stephen Colwell writes a monthly e-mail column on the Consumer OEM sector; Glen Gibbons is a publisher in his own write, familiar to many readers.
GPS World: Behold the Future
In this nascent decade, the GNSS industry will enter its full maturity as truly an indispensable utility for everyday life, at individual consumer, industrial enterprise, and government organization levels. Multi-technology circuitry, which now integrates positioning with other capabilities on a single chip, will only continue its astonishing march.
Galileo and GLONASS will achieve their promise, and Compass will join the family, forming together with GPS a veritable system of systems with highly accessible and accurate coverage and availability even in challenging environments. GPS itself will modernize, strengthen, and expand its considerable capabilities.
As ever, GPS World will be there, up close and personal with the technology and the business, providing eyewitness accounts by researchers, product designers, program managers, and end users.
The magazine will continue serving its international readers and advertisers, accomplishing its mission through an integrated information system of print, e-mail newsletters, websites, webinars, and videos, all communicating critical intelligence to decision-makers and technical experts.
GPS World’s media platform, designed for and dedicated to industry’s use, is a searchable, application-specific knowledge base of GPS/GNSS-related technologies that is mapped to the markets and needs of the community’s core purchasing audience.
Despite its name — and names may change — the magazine has never limited itself to coverage of the U.S. Global Positioning System. We chronicle the development of all GNSS: Galileo, GLONASS, and Compass; of augmentations WAAS, EGNOS, MSAS, NDGPS, QZSS, GAGAN, and GRAS. We track the integration of GNSS with other PNT technologies, such as inertial, laser, Loran, and radio frequency fields such as wireless communications, RFID, Bluetooth, ultra-wideband, and others.
While busy writing and talking, we are also busy listening. We encourage online comments to articles appearing at env-gpsworld-integration.kinsta.cloud. We’ve started one technical discussion forum, Tech Talk, and plan to have another, on chip and circuitry design, flying within months. We administer a LinkedIn network for GNSS professionals to communicate interests, leads, queries, referrals, and open positions; our Facebook page enables members to create unique user content to build meaningful and resource-full discussion.
We have unparalleled personal reach in every industry sector. You’ll find one or more of GPS World’s dozen correspondents and business development consultants at every important technical and business conference. Come right up and give us a piece of your mind. Please.
GNSS — your world. We feel privileged to play a key part in it. — Alan Cameron, Editor-in-Chief
A team will attempt to shatter the world land speed record, with a GPS/GLONASS receiver riding the controls.
photo: GPS/GLONASS
In summer 2010, a team of 44 volunteers will attempt to shatter the world land speed record of 763 miles per hour (2 mph faster than sound) by hitting 800 on the speedometer. To ensure that the North American Eagle takes it to the limit efficiently and safely, the team captures performance data from 70 sensors, locked to position, velocity, and time coordinates by an onboard GNSS receiver.
An old Lockheed F-104, a ’60s era Mach II fighter, rescued from a scrap dealer in Maine seemed to have the mark of greatness somehow still on it, amid the fuselage holes and grafitti. A team of volunteers converted the plane into a supersonic car: one expert machined the solid billet aluminum wheels, another rebuilt the General Electric J-79 engine, another devised a magnetic braking system. Over three years, the team replaced 40 percent of the plane’s skin panels, 5,000 rivets, the front suspension, and the steering and hydraulics systems.
The 56-feet-long, 13,000-pound car features Magna Force Lev-X magnetic brakes, a stock engine that outputs 42,500 horsepower, burning 160 gallons of fuel per minute in afterburner mode, and a backup 52,000-hp engine.
At supersonic speeds, anticipating and controlling the car’s reactions to physical stresses become critical. explains Steve Wallace, data-acquisition engineer: “Stuff happens when you get up to the speed of sound. Shock waves affect the aerodynamic balance of the vehicle, and when you’re flying six inches from the ground, aerodynamic unbalance becomes very important.” Wallace and the team must ensure that the car does not burrow into the ground or lift any of its wheels while in motion; either would be detrimental to record-setting and driver safety.
Accelerometers, strain gauges, piezoelectric sensors, inertial gyros, airspeed and air-pressure sensors, and more all generate streams of data, stored on a laptop computer mounted behind the car’s cockpit. Wallace accesses the system in real time via an Ethernet wireless umbrella of routers mounted on 20-foot-tall towers spaced at 2½-mile intervals alongside a 14-mile track at Black Rock Desert, Nevada. After a test run, he downloads the data to his computer, correlates time and location, then exports to a spreadsheet.
GNSS makes speed measurement more reliable and accurate. “We have a lot of sensors, but one sensor I don’t have is for vehicle speed,” he says. “This is a thrust vehicle; the wheels aren’t driven, so realistically, the wheels are never going as fast as the ground. Measuring airspeed is not a bad way of [measuring vehicle speed], but it’s very noisy. The data are all over the place and you have to do a lot of smoothing and averaging. With GNSS, it’s dead nuts — a great way of getting information I need, fast, without looking at accelerometer data. I can’t think of a more valuable tool to understand what’s happening from a sense of motion of the vehicle in general.
“If we had a $10 million budget, we could buy a ground-tracking radar unit like the Air Force uses, but that ain’t gonna happen. We can get just as good data with this as with a $10 million system, so why go any further?”
The project could provide further practical engineering benefits. The team likens this research to that of the 1960s space program, which benefited development of computers, cellular phones, and microwave ovens.
Manufacturers
A dual-frequency Topcon PG-A1 antenna and Euro 160T OEM receiver collect GPS/GLONASS signals at 20 Hz. A Euro 160T mobile control board rides in the car’s electronics bay. A GB-1000 receiver collects static reference data.
Nice article on “The Smartphone Revolution” in the December issue. I am not so tech-y about the working of GPS/indoor GPS, but I am interested more in this technology specific to indoor GPS (repeaters).
Can the smartphones get indoor GPS signals correctly and quickly? If the smart phones are really smart that they can connect to GPS satellite from indoor locations, then do the GPS repeater products become obsolete?
— Saad B.
Author Frank van Diggelen replies:
The simple answer to your first question is yes, many of these smartphones can get GPS signals indoors. But indoors is a big and varied place, and the more complete answer is that the term “indoor GPS,” like “offroad vehicle,” describes the presence of a capability, not the absence of all limitations. So even if your GPS receiver works indoors in some locations, there will always be other places it doesn’t. And it will generally work better where there are stronger signals, like outdoors.
Similarly, for your second question, high-sensitivity GPS will work some places indoors, but not everywhere, so there is a role for repeaters. However, GPS repeaters are like a long cable from the repeater’s receiving GPS antenna; so any GPS receiver that gets signals from a repeater will compute the position of the repeater’s receiving GPS antenna.
Nice article. One comment and one question.
Comment: The IGS ultra-rapids that started in 1999–2000 were from the beginning available for the future. They always contained 24 hours of estimated orbits and 24 hours of predicted orbits usable in real time. As I was responsible for generating these products within the IGS at that time, I am pretty sure that was the case.
Question: I do not understand why you write that turning off SA (Seletive Availability) was an enabler for A-GPS!? I know that one possible feature of SA was an artificial degradation of the satellite ephemerides but this option was never exercised to my knowledge. So using a global network to obtain broadcast ephemerides and predict them into the future was always possible. Nothing fundamentally changed when SA was turned off!?
— Tim Springer
Frank van Diggelen replies:
Just to be clear, the article enumerated seven enabling technologies for the revolution of GPS in cell phones (they are: A-GPS; massive parallel correlation; high sensitivity; coarse-time navigation; low-power TOW decoding; host-based GPS; and RF-CMOS), and a dominant spin-off technology: long-term orbits good for many days into the future.
The demise of SA made it easier to predict long-term orbits for two reasons: technical and commercial.
Technically, if you used the code- or carrier-phase measurements in your orbit modeling, then it was easier if these measurements were not degraded. Of course, you could have corrected them differentially, but the article makes the point that things were harder (not impossible) when SA was on.
On the other hand, if all you did was use the broadcast ephemeris in your predictions, then as you suggest nothing changed, technically, if the ephemeris degradation option was not exercised. But the fact that this degradation option existed made it a more difficult commercial proposition to develop a system for predicting many days of ephemeris. Thus the end of SA certainly helped facilitate the commercial availability of predicted ephemeris that is valid for many days into the future.
Actually, I created a Twitter account a few months ago but only started actively using it a couple of days ago. Mind you, I don’t change my habits easily. I’m almost never the first person to try something new. I wait for others to play the guinea pig and see if the idea is going to catch on to the mass market before I invest my time. For example, I never created a MySpace page, and I’m glad I didn’t. I do participate in Facebook to keep up with friends and relatives, but that’s a passive thing that requires very little time. The upside is really good if you like staying current with friends/family.
Twittering and blogging are very different than passive social networking tools like Facebook or MySpace or even a website. The fact is that Twittering and blogging require regular attention in order for them to have value, in my opinion. Twitter more so than blogs.
What is Twitter?
Twitter is what I call one-line zingers that people send out. It’s sort of like text messaging in its brevity. Each Twitter message is limited to 140 characters. Twitter messages can be news events (Accenture dumped Tiger), comments on personal status (I’m getting a lobotomy), and so on. People who are interested in what you are doing can decide to follow your Twitter, which means that their Twitter messages will be sent to your Twitter account. Those who are really, really interested in what you are doing can also receive Twitter messages on their phone via text message.
You can send Twitter messages from your computer or from your phone via text messaging. According to Twitter co-founder Evan Williams, up to 60,000 people (assuming they’ve decided to follow you) receive your Twitter message in a matter of seconds after you send it. Click here for a short presentation on Twitter at the TED conference by Williams.
In months past, I’ve asked myself what value Twitter could add to my personal life. My conclusion at that time was and still today, is not much. I’m connected with my friends and family, who live all over the continent and in other countries, via Facebook. I don’t need real-time info about what my family and friends are doing and I’m really not interested in providing real-time info to them about what I’m doing. If there’s an urgent matter, they call me or I call them.
If I didn’t see the value of Twitter in my life, then why did I sign up for it?
For me, I see Twitter as a potentially valuable tool in my job. However, you have to realize that I’m in the gossip business (self-deprecating definition of a journalism) so its value may be more for me than you depending on the value you place on near-real-time information. From my activity on it these past few days, I see the upside. I’m not sure how good of a Twitter provider I’ll be yet, but I’m following about 64 other Twitter-ers and find the information they are providing useful.
I’m far from optimizing my use of Twitter. The people I’m following are providing news updates for the most part, not personal updates, which is the way I like it. If I find that people are sending personal updates, I “unfollow” them. I really don’t care to know if someone is at the dentist’s office. To decide who to follow, I searched for terms such as “GIS,” “GPS,” “mapping,” and similar, as well as for particular companies I want to follow. I spent an hour or so doing this. I’m sure I will add and subtract many more Tweeters, but this is a start and I’m already receiving a wide array of Tweets. Following is what I’ve got on my Twitter list right now, at least the first six entries:
If you want to follow my Twitter, my Twitter name is GPSGIS_Eric. I promise to keep my Tweets relevant and frequently infrequent.
What’s this got to do with GIS and Geospatial technology?
If you’ve followed this column, you’ll recall I’ve mentioned social networking on one or more occasions. Geospatial data and positioning technology (eg. GPS) are a huge part of Location-Based Services (LBS) that will be a significant technology in our lives in the next five years.
Last August, Twitter announced they were working on a Geotagging API that would provide developers the ability to geotag Tweets. As of now, the release is official and they have announced that Twitter developers such as (quote from Twitter blog):
“Birdfeed, Seesmic Web, Foursquare, Gowalla, Twidroid, Twittelator Pro and others are already supporting this new functionality (go try them out now!) in interesting ways that include geotagging your tweets and displaying the location from where a tweet was posted. The added information provides valuable context when reading your friends tweets and allows you to better focus in on local conversations. Now you can find out what live music is playing right now in your neighborhood or what people visiting Checkpoint Charlie are saying today about the anniversary of the Berlin Wall. These are only the beginning and we are really looking forward to seeing the creative uses emerge from the developer community.”
I’m not sure where Twitter is going to end up yet. Maybe it will morph into something different. The entire LBS landscape is really wide open right now. A lot of people will make a lot of money off of different LBS applications. Some will stick, most will not. The challenge for me (and you) is to decide which ones to invest our time in.
Just this morning, I received an email invite from my son to join him on…
P.S. I received an email from Jon Sperling, who contributed an article on TIGER data earlier this Fall, with a link to a paper he co-wrote on using Twitter to “…demonstrate how to use Twitter to automatically obtain breaking news from the tweets posted by Twitter users, and to provide a map interface for reading this news, since the geographic location of the user as well as the geographic terms comprising the tweets play an important role in clustering tweets and establishing clusters’ geographic foci.”
At the end of every year, I devote this column to Directions 2010 in which I discuss significant developments, trends, technologies, and companies in the GNSS industry.
Two years ago, I wrote about the Year of the Who. Not GNSS technology; rather, the people and companies they run.
Last year, I highlighted 2009 as being the Year of the Other GNSS. The little brother of GPS…GLONASS.
I’ve thought a lot about this year’s column. Some have said that next year will be the Golden Year for GNSS with the launch of the first Block IIF satellite, possibly the launch of the first GLONASS-K satellite (broadcasting CDMA), launch of Japan’s first QZSS satellite, launch of a GAGAN geostationary satellite, yada, yada, yada.
The problem with this, as I see it, is that these developments will have very little impact on GNSS users in 2010. All of them have been on the drawing board for years, all have been vetted, and most of them are behind schedule. In a nutshell, it’s beating a dead horse. How many times can one talk about Galileo? Even I get tired of writing about the next satellite launch, the next signal to be broadcast, the next GNSS to be developed, etc.
From a GNSS technology perspective, do you know what excites me? Optimizing the current constellation of satellites that are already in orbit. That’s where the “rubber hits the road.” With a few tweaks of the GPS constellation, our “brownout” periods would largely disappear immediately. No waiting for new satellite launches, no waiting for new GPS receiver technology to purchase. Just like when Selective Availability (SA) was turned off…boom…an overnight difference. Of course, I know it’s not quite as easy as turning off SA, but I think you see my point.
However, even though it’s likely that the Air Force will reconfigure the GPS constellation to reduce the GPS brownouts in 2010, that’s not the focus of this column (although it’s a close second).
Nope. The statement that best defines the GNSS industry for 2010 is one I’ll borrow from Bill Clinton that he used during his campaign for the U.S. presidency in 1992…
”It’s the economy, stupid.”
Why? The current economy is beating the tar out of the GNSS industry.
Revenue for high-precision GPS/GNSS systems is down significantly. Revenues from Trimble’s Engineering & Construction division were down 22 percent in the third quarter compared to the same period last year. Revenues for Hemisphere GPS, a GPS manufacturer focused on the agriculture industry, were down 31 percent in the third quarter compared to the same period last year.
When revenue decreases significantly, companies typically react by cutting costs. Some of the first expenses cut are research projects that can lead to revolutionary developments. Companies also review personnel requirements and subsequently reduce headcount.
Decrease in corporate revenues also trickles down to the distribution channel. The GNSS distribution channel (surveying equipment dealers) have taken a big hit. Layoffs are prevalent and many dealers are reduced to operating with “skeleton crews.”
In the service sector, I’ve heard from several companies that bid pricing on construction projects is coming in at 20 to 30 percent less than the pre-recession period and bid competition for each project has increased. This results in a lower profit margin for the successful bidder and, as a result, there is less money available in capital equipment budgets for contractors.
On the flip side, the market for used surveying equipment is hot, GPS/GNSS equipment included. Companies and individuals looking to trade equipment for cash or going out of business altogether are pushing their equipment to the market, primarily using eBay. This flood of “fire-sale” surveying equipment contributes somewhat to the declining revenue for new GPS/GNSS equipment.
It’s a vicious cycle that’s difficult to recover from.
In 2005, economics Professor’s Hugh Patrick and David Weinstein from Columbia University and economics Professor Takatoshi Ito from the University of Tokyo wrote about “…a prolonged period of stagnation and malaise…Subpar growth, failing banks, plummeting real estate and stock prices, deflation, unprecedented unemployment, and huge government liabilities have persisted, despite extraordinary fiscal and monetary policy fixes.”
It reads as though they were writing about today’s U.S. economy, but they were actually writing about the Japanese economy which has been stagnant since 1991. Their book is titled “Reviving Japan’s Economy.”
It’s a little disconcerting to think about the U.S. recession lasting that long, but I do have a hard time seeing the light at the end of the tunnel. I think real estate prices will continue to depreciate and the effects of the commercial real estate market will reverberate through the economy for several years.
Let’s face it: high-precision GNSS receivers are a luxury item for the most part. In some cases, the argument can be made that the investment has a ROI (Return on Investment) that justifies the capital expenditure. But in many instances, companies and individuals might decide to save the cash and forego the efficiency that GNSS equipment offers or continue using their legacy GPS equipment that may not be the most efficient technology, but it does the job.
That, my friends, is the reason that the economy, and not a GNSS technology development or trend, will be the most significant factor in the GNSS industry in 2010.
From the Mailbox
We received a Letter to the Editor regarding my last column titled “As Loran Fades, Attention Shifts to DGPS and SBAS.” Following is the letter:
As I read the title of this month’s Survey newsletter column, “As Loran Fades, Attention Shifts to DGPS and SBAS,” it came to my mind that there are many people around the world who do not recognize the difference between a position, navigation, and time (PNT) system and an augmentation of a PNT system — a difference that was not clearly pointed out. I have heard many PNT users expound on how good an augmentation is and, to my amazement, how the augmentation could provide service despite a GNSS outage. I’ve stopped being surprised. After all, I still remember the days when Galileo was being touted as a backup to GPS.
Unfortunately, the leadership worldwide has become decidingly less technical over the last decade, and without proper explanation from staffers (who have also become decidingly less technical), the point is lost.
The simple fact is that augmentations are of little or no use if the system they augment is unavailable. Perhaps this point should be made, and made loudly and strongly — particularly in the case of the scheduled termination of Loran. The same holds for the respective differences between real-time navigation, long-term positioning, and time and frequency — distinctions, again, that are lost to many. While WAAS, NDGPS, and even HA-NDGPS are admirable efforts that highlight what a group of talented, dedicated engineers can do, maybe what we need is a PNT 101 course/flash card set for those “technically challenged” so they can better understand the ramifications of their decisions. It took me and millions of others five years to get a bachelor’s of engineering degree; we cannot expect the leadership to learn engineering overnight.
I remember fondly the times when, as a junior engineer, I had five layers of management above me that all held engineering degrees. Today I ca
n’t go up to any level and find a single one. What went wrong? I do not know, but I do not think it bodes well for the world.
In any event, best regards to GPS World, and Happy Holidays
— a wistful engineer
Thanks for the note.
I believe there are some very smart people in the federal government running these programs. Sadly, I think the demise of programs like Loran are largely the result of political efforts, or lack thereof, rather than a lack of technical understanding. If no one is going to fight for the program, most likely it’s not going to be funded. Furthermore, I think most people agree, engineering educated or not, that GPS is a venerable system. However, it’s debatable whether Loran is a suitable back-up or not.
Perhaps the title of my article was a bit misleading, too. I don’t think anyone would claim that GPS augmentation is a back-up for GPS. My point was that resources (energy and money) and focus would shift to GPS augmentation as it has become the replacement for Loran in the marine and aviation industries.
It used to be relatively easy to compartmentalize what GIS was and who were the major players in the industry. It’s not so easy any longer.
Take a look at the following graphic published in a market research abstract from Daratech, Inc., a firm from Cambridge, Massachusetts. When one thinks of traditional GIS software providers, this list covers the major ones. As you would surmise, ESRI is the top dog for pure-play GIS software sales.
Intergraph #2? Naaaah. I don’t believe it. Last decade, Intergraph was trying to compete with ESRI in the pure-play GIS software business. But in 2000 Intergraph made a major strategic shift. It bailed out of the hardware business (thanks, in part, to litigation with Intel) and then began focusing on providing software and consulting for vertical markets. Next, after years of being a publicly traded company, Intergraph was “taken private” by Hellman & Friedman LLC, Texas Pacific Group and JMI Equity. In 2010, it nearly reach $1B in revenue, the same revenue number it reached in 1990, 20 years earlier. It’s impressive considering the company significantly shifted its focus and exited the hardware business. But, the company isn’t a factor in the pure-play GIS software business any longer. It’s tough to try to compare it to ESRI, Smallworld, MapInfo, and even Autodesk.
Smallworld (GE Energy), Bentley, MapInfo (PB), and Autodesk offer pure-play GIS software. While the Daratech reports that ESRI has about 30 percent of the GIS software market, it’s a lot higher than that thanks to a grassroots distribution channel that reaches nearly every corner of the globe.
One of the more interesting thoughts in looking at the list of GIS software vendors above is the GIS vs. CAD approach. Clearly, Autodesk, Intergraph, and Bentley design their software from the CAD perspective while ESRI, Smallworld, and MapInfo design their software from the world of GIS. With that in mind, it’s natural that when these companies think about expansion, the GIS-centric suppliers to want to invade the CAD market and for CAD-centric suppliers to want to invade the GIS market. This battle has been going on for many years with no company having the ability to become a dominant player in both CAD and GIS. This is not for lack of trying. Autodesk, who in my opinion is in the best position to invade the GIS space given its worldwide presence and heavy penetration in the AEC (architectural, engineering, construction) market, has plowed a ton of resource into their GIS offerings, it seems to have reached a plateau in terms of market share.
Anyway, I digress. On to the next Daratech chart. The following graphic, according to Daratech, encompasses a larger “umbrella” than just GIS to include “data, geo-enabled engineering, GPS, photogrammetry, and remote sensing.”
After viewing this chart, my first thought was “Where’s Google, GeoEye/Spot Image/DigitalGlobe/RapidEye?” My intention is not to criticize Daratech, but to ask the question “Who is geospatial?” The answer is not clear.
Whereas GIS is and will continue to be a highly technical profession in which the geospatial infrastructure is based, geospatial data and services are weaving their way into the lives of the consumer. Obviously, Mapquest/Google Earth/Bing Maps/Yahoo Maps paved the way and then were followed by GPS navigators. However, what will dwarf the MDAs, ESRIs, Autodesks, and Intergraphs of the world are when the wireless service providers (think mobile phones) really kick it in gear. Some already have. A company called TeleNav writes navigation software for mobile phones. TeleNav’s product is what Sprint sells to their customers for GPS navigation on their mobile phones for $10/month. Even in these dire economic times, TeleNav filed for an Initial Public Offering (IPO) last month. They are growing like crazy…~700 employees. Are they a geospatial services company? I think so. The Verizon VZ Navigator application written by Networks In Motion Inc. (NIM) boasts millions of paying subscribers. Let’s see….$10/month * 5 million subscribers = REAL MONEY. Not surprisingly, NIM was acquired just last week by TeleCommunication Systems for US$170M.
Navigation applications are just the tip of the iceberg for mobile phone users. There is a ton of software development going on in the social networking arena, which is under the LBS (location-based services) umbrella. Social networking applications are going to be huge. Look at Loopt. Their application is available on AT&T, Sprint, Verizon, Metro PCS, T-Mobile, and Boost for $4/month. ABI Research estimates that the value of location-based social network companies like Loopt will be $3.3B by 2013.
Of course, one can already see the writing on the wall. The $10/month price for a navigation application or $4/month for a social networking application won’t remain that high. As competition heats up, the giveaways and bundling will begin. That’s when the volume will really crank up into the hundreds of millions of users.
Now, I’m even confusing myself. Who is geospatial?








 However, a payload glitch found aboard one recent satellite after its launch into space forced a return to the factory of three satellites scheduled for launch in September. The three put into orbit this week will now only bolster continuing GLONASS coverage of Russian sovereign territory, which requires 18 operating spacecraft.
However, a payload glitch found aboard one recent satellite after its launch into space forced a return to the factory of three satellites scheduled for launch in September. The three put into orbit this week will now only bolster continuing GLONASS coverage of Russian sovereign territory, which requires 18 operating spacecraft.