At the Joint Navigation Conference in San Diego, BAE Systems unveiled NavGuide, an assured-positioning, navigation and timing (A-PNT) device featuring M-code GPS technology. NavGuide is a field-installable replacement to the defense advanced GPS receiver (DAGR), designed for quick integration into current DAGR mounts and accessories without mission interruption.
NavGuide features a 3 in, full-color, graphical user interface for dismounted soldiers, and easily integrates with existing mounted platforms and systems. The device leverages the advanced M-code GPS signal with enhanced jamming and spoofing protection.
NavGuide is portable, versatile, and precise, and enables vehicular, handheld, sensor, and gun laying applications that enable the military to defeat adversaries in a variety of challenging threat environments.
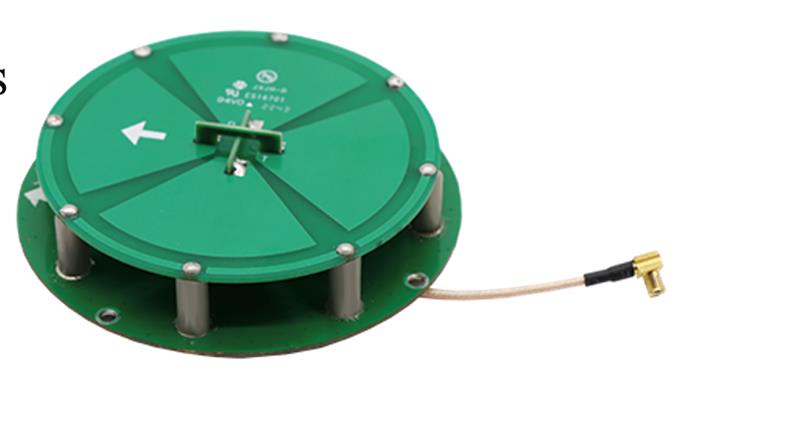
Harxon has released two high-precision GNSS antennas suitable for robotic lawn mowers.
The HX-CSX014A is a high gain, low profile and compact antenna with a new structure that simplifies integration into lawn mowers and minimizes the overall machine dimension. It features small size, high sensitivity and low power consumption.
The HX-CSX231A, is a ready-to-use GNSS antenna with a highly reliable structure that makes it small and lightweight. It exhibits 4.5 dBi high gain performance with ultra-low signal loss. It also delivers wide beam width that covers wide frequencies with high marginal gain, a perfect option in complex environments.
Additionally, the HX-CSX231A’s advanced LNA features improved signal filtering, out-of-band rejection, restrained unwanted electromagnetic interferences and a strong multi-path reduction capacity.
To learn more about Harxon high precision GNSS solutions for lawn mowers, click here.
OceanGate. (Credit: Screenshot of NBC news coverage)
On June 17, an OceanGate Expedition Titan submersible launched off the coast of Newfoundland, Canada, carrying five passengers to the bottom of the Atlantic Ocean to explore the infamous R.M.S. Titanic shipwreck. The U.S. Coast Guard said that the submersible lost contact with the surface vessel about an hour and 45 minutes after the launch and has not been in contact since.
The submersible can support life for 96 hours. As of the afternoon of June 20, it had 40 hours of oxygen left and U.S. and Canadian agencies were still searching for it.
The Titan submersible explained
According to the OceanGate website, the Titan is “a Cyclops-class manned submersible designed to take five people to depths of 4,000 [m] (13,123 [ft]) for site survey and inspection, research and data collection, film and media production, and deep-sea testing of hardware and software.” The Titan is equipped with an inertial navigation system (INS), an ultra-short base line acoustic positioning system, a robotics laser scanner, a Teledyne 2D sonar and more.
While it is equipped with an INS, the Titan relies on messages from a surface ship to guide the submersible to the shipwreck. The submersible and surface vessel rely on Elon Musk’s Starlink satellites for communication.
A part of the Titan worth mentioning, the crew is sealed inside and bolts are applied to the outside — needing an external crew to remove them upon surfacing.
Foreshadowing
The New York Postreported, in 2022, that an OceanGate Expedition to the Titanic lost contact for more than two hours and never found the wreck.
Aboard the submersible was a CBS correspondent, David Pogue, who was filming a segment for CBS Sunday Morning. He tweeted about the incident.
There are 18 planned expeditions to the Titanic with OcenGate Expeditions to survey the shipwreck, collect data, and document high-resolution images and videos.
The entire trip to the Titanic wreck site takes 8 days, and one dive can take up to 10 hours. The expedition is comprised of five legs.
Septentrio’s compact GNSS timing module, mosaic-T, now supports the AtomiChron timing service from Fugro. The mosaic-T module already includes several layers of security against GNSS jamming and spoofing with AIM+ integrated technology and OSNMA Galileo authentication; however, AtomiChron further strengthens the anti-spoofing security of the mosaic-T receiver by offering navigation message authentication on all four major GNSS constellations.
Fugro AtomiChron includes navigation message authentication, which ensures timing resilience through reception of only genuine GNSS signals. The AtomiChron eliminates time drift caused by clocks counting time at slightly different rates. This achieves sub-nanosecond accuracy and provides extreme stability that surpasses current precision frequency standards. This is a lightweight and scalable solution, which removes the need for atomic clocks in critical infrastructure.
The mosaic-T delivers accurate timing with multi-frequency, multi-constellation GNSS technology and offers dedicated timing features and inputs for time and clock synchronization. AtomiChron capability can be obtained via a software upgrade for new receivers or for receivers which are already operational in the field.
The AtomiChron service is optional and can be activated through Fugro. To find out more about mosaic-T or the secure positioning receivers from Septentrio use the Product Finder tool or contact the Septentrio team.
CHC Navigation has released the C5 and C30 orthographic and oblique cameras for aerial surveys. The systems are designed to provide high-quality imaging solutions for photogrammetric applications and to complement lidar survey data.
The C5 camera is an efficient and lightweight system for aerial surveys, weighing 290 g for increased flight endurance. Its compact size of 75 mm x 63.5 mm x 102.5 mm allows easy integration into UAVs. The C30 camera’s weight is 600 g with a size of 110mm x 108 mm x 85 mm. The C30 is also designed for aerial surveying.
The C5 and C30 cameras’ universal installation design makes them compatible with a wide range of fixed-wing and rotor UAV platforms. Both cameras are supported by the CHCNAV’s BB4 Mini and P330 Pro UAVs as well as the DJI’s M300 RTK.
The Alphaport (the A-type hardware interface) enables the C5 and C30 to be easily mounted into various UAVs and converted into the DJI Skyport connector for extended compatibility.
The C5 and C30 cameras give maximum flexibility for photogrammetric applications. They can be used independently on real-time kinematic-enabled UAVs to capture high-resolution imagery or installed directly on the CHCNAV’s lidar series to colorize point cloud data. This feature allows seamless imagery and lidar data integration for a more complete view of the surveyed area.
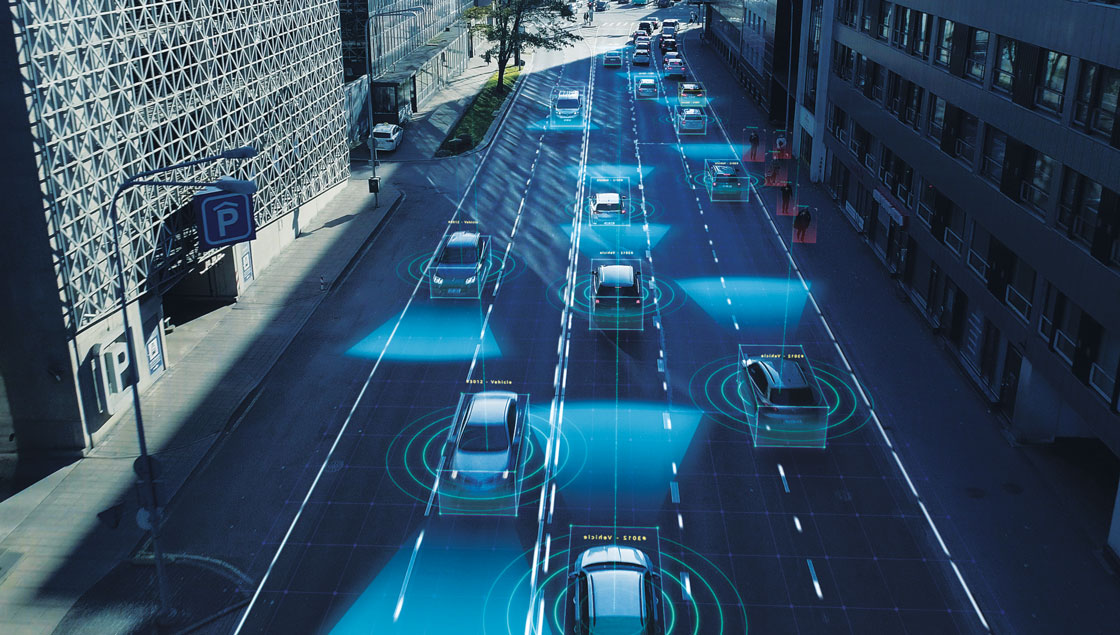
GNSS researchers presented hundreds of papers at the 2022 Institute of Navigation (ION) GNSS+ conference, which took place Sept. 19–23, 2022 in Denver, Colorado, and virtually. The following four papers focused on autonomous applications in transportation. The papers are available here.
Addressing integrity monitoring of autonomous navigation
There are critical issues for the integrity monitoring of autonomous navigation applications, which include an adequate uncertainty budget in the observation domain, redundancy for the determination of the navigational states, and the capability of fault detection and exclusion.
Several aspects are addressed in the paper, including how to: determine interval bounds to handle GNSS multipath effects in urban environments, realize fault detection and exclusion based on constraint satisfaction and set membership, and improve the detector using weighting models.
The authors of the paper aim to contribute to the alternative integrity approach based on interval and set representations for bounding and propagating system uncertainty. Simulated and real-world experiments are carried out to demonstrate the feasibility of the authors’ proposed methods.
The authors note that statistical evaluation of integrity will not always suffice due to the presence of remaining systematic uncertainty, but state the alternative integrity approach will contribute to future autonomous navigation applications.
Su, Jingyao; Schön, Steffen; “Advances in Deterministic Approaches for Bounding Uncertainty and Integrity Monitoring of Autonomous Navigation.”
Estimation and reference systems in automation
For a high level of automation, estimation is crucial, and to achieve a full and reliable navigation evaluation, a trustable reference system needs to be developed.
Although the presence of a reference system and of an inertial measurement unit with GNSS through the multi-sensor fusion scheme was integrated, in GNSS-denied or challenging environment the navigation solution could not be accurately estimated and still needs to be fixed.
The authors of the paper propose new strategies to better estimate the lidar-based position uncertainty and to update the reference system.
The first strategy proposed involves determining the appropriate position error covariance matrix, based on the Hessian matrix and the scale of covariance obtained from a normal distribution transform (NDT) scan matching technique and the geometric dilution of precision computed from the distribution of point cloud segments in each scan.
In the second strategy proposed in the paper, the updated reference system was post-processed according to the loosely coupled INS/GNSS/NDT integration scheme with a forward and backward smoothing process.
The results of the proposed strategies indicated that the updated reference system provides more reliable navigation estimation compared to an existing reference system from commercial software and can be used for accurate evaluation of positioning, navigation and timing with automated vehicle applications.
Srinara, Surachet; Chiu, Yu-Ting; “Adaptive Covariance Estimation of Lidar-Based Positioning Error for Multi-Sensor Fusion Scheme with Autonomous Vehicular Navigation System.”
Evaluating TerraStar-X
GNSS performance using typical, low-cost GNSS devices in vehicles is not enough to achieve the positioning and availability needed for lane-level accuracy on autonomous vehicles. The antenna and receiver hardware available in standard vehicles limits the position accuracy and convergence performance. These limitations make the positioning more susceptible to error sources such as receiver multipath, noise, carrier tracking and stability.
GNSS correction services with additional design considerations and sophisticated algorithms are needed to work within the constraints of automotive-grade GNSS devices to achieve the performance required for lane-level positioning.
TerraStar X technology from NovAtel enables these applications. It includes an orbit and clock determination system (OCDS), which produces a set of corrections, precise satellite orbits and clocks, and satellite-specific biases for individual signals augmented by the computation of additional regional corrections.
The authors of the paper outline the design and performance of the combined OCDS and regional correction system. They demonstrate the performance of the TerraStar X technology across a variety of applications.
The addition of regional corrections enables automotive and mass-market applications to achieve in-lane positioning in seconds, using any dual-frequency, dual-constellation GNSS hardware. The result is software that provides a continuous stream of multi-constellation, multi-frequency GNSS corrections — enabling a correction service that makes the affordable GNSS device ecosystem possible.
Regional corrections also improve the performance of survey-grade GNSS receivers.
Mervart, Leos; Lukes, Zdenek; Alves, Paul; “TerraStar X Technology: Design of GNSS Corrections for Instantaneous Lane-Level Accuracy on Large Scale Connected Vehicles and Devices.”
Solving the localization problem in autonomous driving
The localization problem in autonomous driving imposes two criteria on the navigation solution: accuracy and reliability or integrity. According to the authors of this paper, solving the localization problem is a key requirement to enabling the development of autonomous platforms.
This paper presents AUTO, a real-time integrated navigation system that tightly integrates INS, GNSS-RTK, odometer, and multiple radars sensors with high-definition maps to achieve a high-rate, accurate, continuous, and reliable navigation solution. It also shows how AUTO leverages a tight integration of imaging radars with other traditional sensors to provide a robust navigation solution with corresponding estimates of the uncertainty.
The AUTO solution was tested in a variety of environments and locations, including a range of conditions such as winter weather, to assure the robustness and reliability required by autonomous applications.
The results demonstrate the lane level accuracy of the solution in a variety of challenging urban and downtown environments. Additionally, the tight integration enables the determination of protection levels to describe upper bounds on the uncertainty.
The results in the paper are illustrated using a Stanford Diagram, along with a user-defined alert limit to describe the solution integrity and availability. The proposed algorithm uses a map matching technique between the imaging radar data and a globally referenced high-definition map to better estimate the solution uncertainty and protection levels.
AUTO’s tightly integrated approach to integrity monitoring means uncertainties and protection levels can be determined even in areas where the system may experience extended periods of GNSS unavailability.
Krupity, Dylan; Chan, Billy; Ali, Abdelrahman; Salib, Abanob; Georgy, Jacques; Goodall, Christopher; “Integrity Monitoring and Uncertainty Estimation with AUTO’s Non-linear Integration of Multiple Imaging Radars and INS/GNSS for Autonomous Vehicles and Robots.”
Now the most impactful GPS receiver upgrade comes with the smallest mission interruption. Learn how the portable NavGuide GPS receiver delivers secure M-Code PNT data.
A business-to-business, controlled-circulation magazine such as this one is a three-way partnership between the companies that support it by buying ads; the staff who write, edit and lay out the magazine’s editorial content, write a steady stream of posts for our website and digital newsletters, and sell advertising; and you, the readers, without whom we would not exist.
There are more than 30,000 of you who subscribe to the magazine (more than 17,000 to the print edition and more than 18,000 to the digital edition, with some overlap). Additionally, our website has about 97,000 unique monthly visitors, our e-newsletters have about 92,000 monthly subscribers, and we have about 46,000 social media followers. About 30% of you are in surveying and mapping, 18% in defense and government, 13% in professional and consumer OEM, and others in transportation, wireless/location-based services, distribution and resale, machine control and precision agriculture, and system design and testing.
You’re a large pool of knowledge, experience, and insight. I want to invite you to contribute to GPS World as sources, advisers and writers.
Perhaps you are a retired engineer with decades of experience designing receivers, antennas, or navigation systems and would like to share a few of the lessons you’ve learned. Perhaps you are a surveyor with a wish list of features for the next generation of rovers. Perhaps you are the manager of a port that uses GNSS to automate ship loading and unloading operations, or of a farm that relies on precision agriculture, and you have some observations worth sharing about your return on investment.
If you are a professor of engineering, you might want to bring to my attention a particularly promising student project. If you develop consumer products or positioning and navigation solutions for mass transit, or timing solutions for the financial sector, you might have interesting insights to share.
Alternatively, perhaps you would like to propose a question for our editorial advisory board, or a topic for the next installment of our “Authoritative Reference” series. Of course, occasionally you might also want to point out errors or omissions in one of our published articles or online posts. I welcome that feedback, too.
We already work with the marketing and media relations staff of our marketing partners, as well as public relations firms that represent GNSS/PNT companies. I always welcome their email messages and calls. This is not intended as an additional channel for them. I am also not setting up a discussion forum, because that would require content moderation and backend IT resources. Rather, I want to solicit comments, suggestions and interesting, useful content from people throughout the industry — some of which will guide or inspire my editorial choices and some of which I will publish.
We have limited room in print, but plenty online. Therefore, while I will occasionally work with the author of a particularly interesting or informative piece to generate an article for print publication, I will much more often choose articles, columns, and comments for online publication.
Leica Geosystems, part of Hexagon, has released the Leica CountryMapper for large-area imaging and lidar mapping. Combining a large-format photogrammetric camera with a high-performance lidar unit into a single system, the CountryMapper collects foundational geospatial data simultaneously to support a wide variety of user applications.
The CountryMapper combines imaging and lidar sensor modules into a highly efficient hybrid airborne system. The sensor features CMOS-based Leica MFC150 camera modules that leverage true mechanical forward-motion-compensation to deliver high image quality.
The sensor’s new Hyperion3 lidar unit features 60° field of view, improving the performance and flexibility of the system compared to previous lidar modules, while reduced laser divergence provides greater planimetric accuracy and better foliage penetration. The CountryMapper fully integrates with Leica HxMap multi-sensor end-to-end processing workflow, enabling distributed processing of images and point clouds to optimize productivity for very large data sets.
The CountryMapper supports applications such as orthophoto generation, terrain mapping, hydrography, forestry monitoring and infrastructure management. Users of previous-generation sensors can leverage their initial investment and upgrade their systems to the CountryMapper configuration.
Tallysman’s custom XF filtering has been tested to mitigate new (Europe and Japan) and existing LTE signals, enabling the XF antennas to produce clean and pure GNSS radio frequency data.
Image: Tallysman Wireless
The TW7972XF surface mount Accutenna antenna has a metal base and robust IP67 military-grade radome. Attachment methods include screws, adhesive tape, and magnet mount.
Many antenna connectors and cable options are available.
The Safran Navigation & Timing critical infrastructure solution, White Rabbit, has received high praise in a report published by the European Commission (EC) Joint Research Center (JRC) that evaluates the effectiveness of alternative positioning, navigation and timing (APNT) platforms.
For more than eight months, the commission studied a variety of available solutions to assess the performance of APNT demonstration platforms in a variety of situations where there is signal loss, and a backup system is necessary. The selected solutions were evaluated for precise and robust timing and positioning services in challenging indoor and outdoor environments.
Safran’s White Rabbit is a high-accuracy time and frequency distribution protocol, which combines precise time protocol (PTP) packets with the frequency base of Synchronous Ethernet (SyncE) to provide sub-nanosecond time transfer accuracy over an optical fiber. While the results of the test campaign showed that all APNT platforms under evaluation demonstrated performances in compliance with the requirements set, White Rabbit excelled in its performance.
Safran demonstrated White Rabbit’s ultra-accurate time transfer over fiber optics, its high-performance time generation, resiliency (based on failover and holdover), interoperability, and user-friendly monitoring capabilities.
As stated in the report, Safran demonstrated, “the ability to handle multiple master clock inputs with voting and seamless switchovers. Interconnecting as many NMIs as possible, with possible local atomic clock backups, would result in a very robust and resilient time architecture, independent from GNSS across Europe. The ability to provide resilient and accurate time through the EU communication infrastructure, ideally on the nanosecond level, would also enable robust positioning, using a combination of signals.”
The European Union Agency for the Space Programme (EUSPA) has announced that as of June 1, the latest European Geostationary Navigation Overlay Service (EGNOS) payload is operational ahead of the first V3 test signals.
Launched onboard the EUTELSAT Hotbird 13G satellite in November 2022, the payload underwent a rigorous testing phase before entering service. It is expected to have a 15-year life span.
EGNOS V3 will augment both GPS and Galileo in the L1 and L5 bands. It is also set to provide additional satellite-based augmentation system (SBAS) service capabilities through a new SBAS channel on L5 and will deliver increased EGNOS service availability within and beyond the EU, supporting a growing number of users.
Aviation has benefitted greatly from the EGNOS safety of life service. This has enabled better access to small and regional airports, increased safety, and facilitated more sustainable flight routes across Europe. Other industries, such as maritime and rail, also benefit from the EGNOS safety of life service.
In addition, with its Open Service, EGNOS increases the positioning accuracy for other land-based applications including precision farming, geomatics and land management.
About EGNOS
EGNOS is Europe’s regional SBAS. It is used to improve the performance of GPS and will augment Galileo from 2025 onwards. EGNOS was deployed to provide safety of life navigation services to aviation, maritime and land-based users.
The information provided by EGNOS improves the accuracy and reliability of GNSS positioning information while also providing a crucial integrity message. In addition, EGNOS also transmits an accurate time signal.