Leica Geosystems, part of Hexagon, has launched the Leica Pegasus TRK300, designed for various mobile mapping applications. As mobile mapping becomes increasingly important for collecting geospatial data, the technology supports smart city projects, infrastructure development and digital twin creation, improving urban planning and operational efficiency across industries.
With this new system, users with varying levels of experience can efficiently capture high-quality point cloud data. “The Pegasus TRK300 opens exciting opportunities for any business looking to enhance and grow their mapping capabilities, from identifying potholes to optimizing city center traffic flows,” says Christian Schäfer, business director mobile mapping at Leica Geosystems. “Because it is lightweight and designed with the user in mind, a single person can easily transport it and mount it to a vehicle, delivering results with minimal effort.”
Photo: Leica Geosystems
The Pegasus TRK300 features a multi-beam scanner system with two scanning heads that quickly collect high-resolution data from multiple angles, minimizing data gaps. With a range of up to 300 meters, the system covers wide corridors and large open areas, reducing the need for multiple passes. This capability allows users to map more ground in less time without sacrificing data quality, resulting in a high-density point cloud suitable for asset mapping and smart city modeling.
The Pegasus TRK300’s robust design allows it to operate in challenging conditions, including heavy rain and dust. Its seven-hour battery life supports a full day of fieldwork without frequent battery changes. The system complements the Pegasus TRK portfolio by offering a portable solution that balances advanced data capture with ease of use.
The Pegasus TRK300 integrates with Leica Pegasus FIELD for data capture and system monitoring and with Leica Pegasus OFFICE for advanced post-processing and final deliverables. This integration seeks to streamline workflows for mapping infrastructure, streets and assets, eliminating complicated file conversions or compatibility issues.
Advanced Navigation has successfully demonstrated a hybrid solution — AdNav OS Fusion — for long endurance GNSS-denied navigation, a software-fused inertial-centered architecture that can be updated or modified for harsh environments and mission requirements, including on the moon.
This advancement is achieved by integrating a strategic-grade fiber-optic gyroscope (FOG) inertial navigation system (INS) with a new class of navigation aid: a laser velocity sensor (LVS). The result is a fused hybrid architecture that delivers precision and reliability in even the most challenging environments.
Advanced Navigation’s FOG INS, which is sensitive enough to detect the Earth’s rotation, provides that foundation by delivering precise attitude. Complementing this, the company’s LVS uses infrared lasers to measure a vehicle’s ground-relative 3D velocity with exceptional accuracy and long-term stability. Unlike conventional sensors, LVS performs reliably on both ground and airborne platforms, as long as it maintains a clear line of sight to the ground or a stationary surface.
Beyond its role as a velocity aid, LVS also enhances navigation resilience by detecting GNSS spoofing. By comparing its independent velocity measurements against GNSS-derived velocity, LVS adds an extra layer of security to assured positioning, navigation, and timing (APNT) strategies.
AdNav OS Fusion draws on sophisticated algorithms to interpret and filter sensor data. The software is designed to dynamically weigh the input from each sensor, adjusting in real time based on reliability scores, environmental conditions and operational context. This ensures continuous, high-confidence state estimation even when signals are lost, degraded or distorted.
Demonstration with real-world data
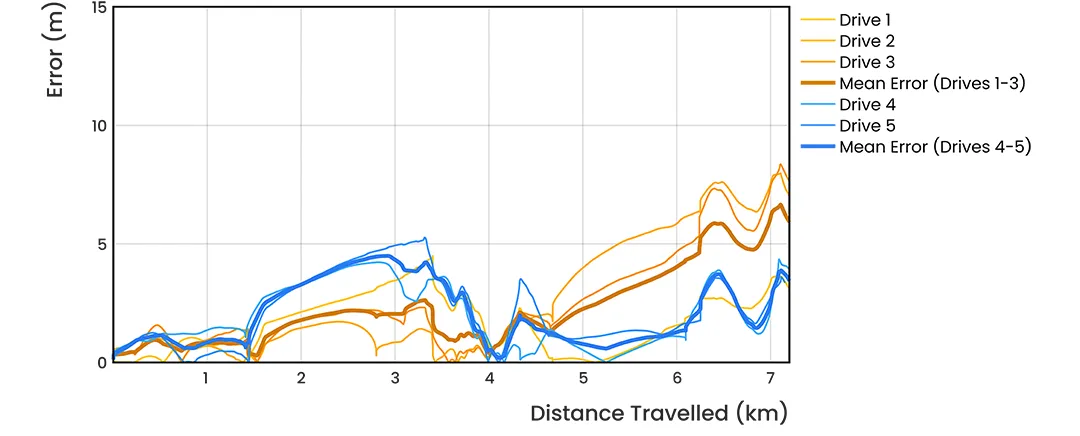
Advanced Navigation conducted a series of rigorous real-world driving tests. Across five trials, the system delivered exceptional performance with an average error per distance traveled of 0.053% compared to a GNSS reference.
At the starting point, GNSS on the INS was disabled in the state estimation process, forcing the system into dead-reckoning mode. RTK GNSS was logged separately as a reference. This approach allows for a direct comparison between the computed dead-reckoning solution and a trusted position reference.
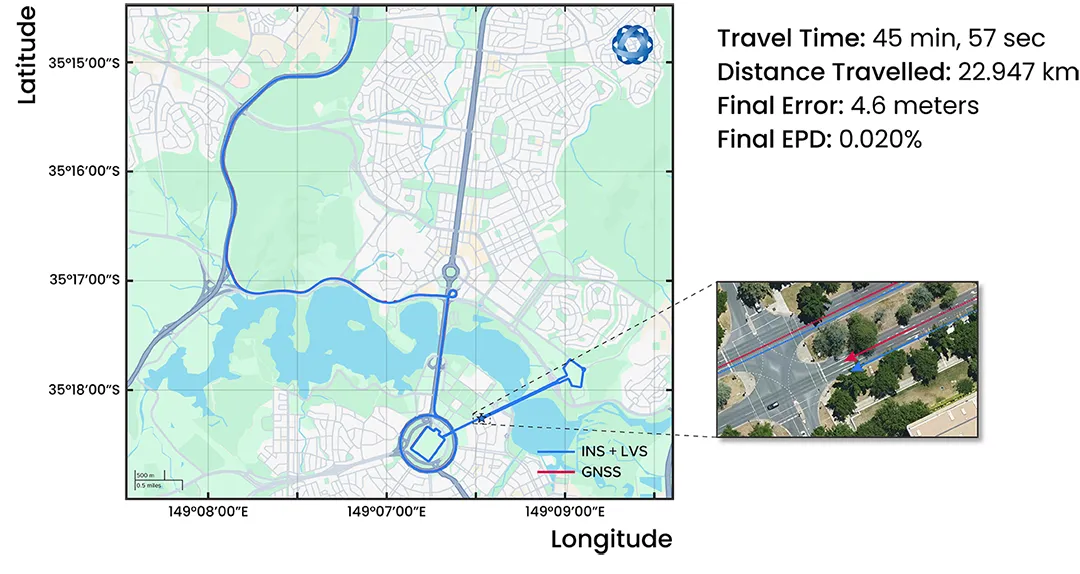
The below data shows dead-reckoning results from a 23 km drive around Canberra, Australia. GNSS was not used at any point in the drive for heading or position. RTK GNSS is shown as the red line, while the hybrid system’s result is shown in blue.
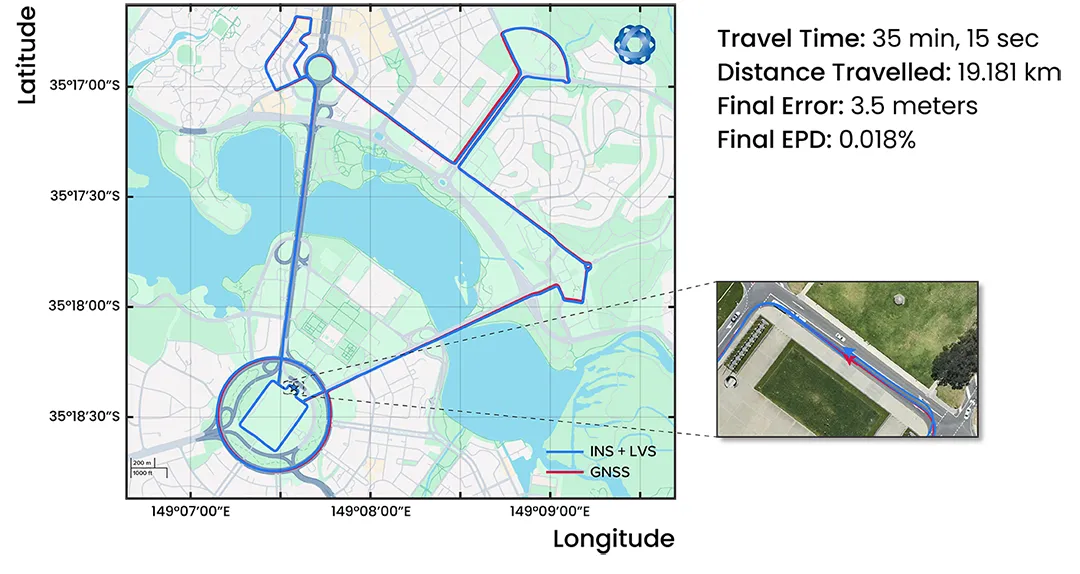
The below results are from a 19.2 km drive around the Parliamentary Triangle in Canberra. GNSS was not used at any point in the drive for heading or position. RTK GNSS is shown as the red line, while the hybrid system’s result is shown in blue.
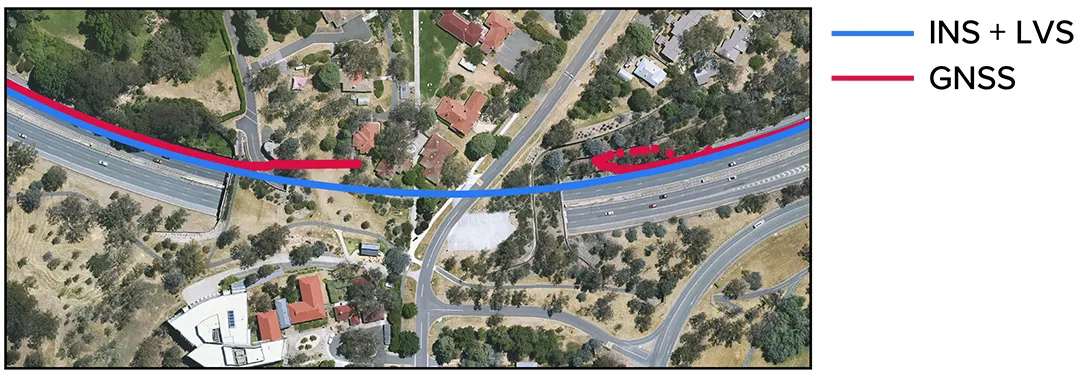
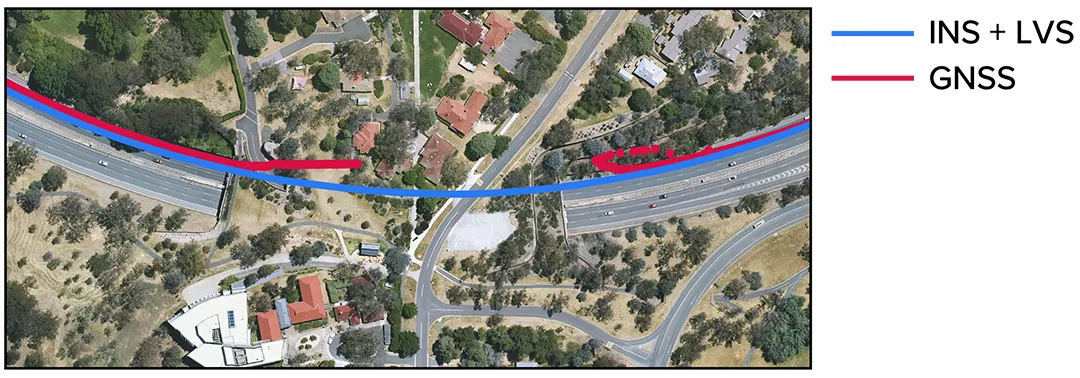
The figure below is a zoomed section from the first test drive, showing GNSS (red) drop out as the test vehicle drove through a tunnel, which completely denied the GNSS reference measurement. The hybrid system’s result can be seen in blue, showing it did not suffer from this error.
These drives were done repeatedly, demonstrating consistent and reliable results each time.
The hybrid system was also tested on a fixed-wing aircraft combined with a tactical-grade INS, demonstrating a final error per distance traveled of 0.045% over the course of a low-altitude flight over 545 km. These results demonstrate the system’s impressive ability to improve navigation performance of the INS in GNSS-denied or contested scenarios. For a more in-depth look into the technology, read the white paper here.
Commercializing space to Earth
LVS is a terrestrial adaptation of LUNA (Laser Unit for Navigation Aid), a space-grade navigation technology developed for autonomous lunar landings. LUNA enables reliable navigation in the harsh environment of space by providing precise three-dimensional velocity and altitude information relative to the Moon’s surface. The result of several years of research and development, LUNA is set to be demonstrated aboard Intuitive Machines’ Nova-C lander as part of NASA’s Commercial Lunar Payload Services (CLPS) program.
By leveraging the engineering insights gained from LUNA, LVS adapts space technology into an Earth-ready solution for terrestrial GNSS-denied navigation.
UK-based Chronos Technology Ltd, an international leader in resilient synchronization and timing solutions, has acquired Norwegian company UpLink A/S.
UpLink is a leading supplier of time and timing systems and test equipment for the Norwegian market. Established in 1990 by owner and Managing Director Joachim Nielsen, UpLink supplies solutions to the telecoms, IT, transport, frequency and timing, power grid, offshore and defence markets.
“This strategic agreement will enhance the Chronos presence in Scandinavia enabling us to deliver Microchip’s solutions into the Norwegian market underpinned by our expertise and professional services,” said Joanne Akers, Managing Director of Chronos Technology. “I am delighted to work with Joachim to further support our Norwegian customers and ensure a seamless integration of business activities.”
China’s BeiDou satellite navigation system has achieved major breakthroughs and in-depth applications across a wide of range of sectors, according to a white paper issued May 19 and reported by South China Morning Post.
The report was released by the Global Navigation Satellite System (GNSS) and Location Based Services (LBS) Association of China, a semi-official industry body. It reported that BeiDou cemented its leading position in the Chinese market in 2024. , as its economic footprint grew more than 7 percent and it expanded its compatibility to support a broader range of devices.
Key findings from the report:
BeiDou tracks locations more than 1 trillion times every day.
BeiDou drove a total of 575.8 billion yuan (US$79.9 billion) of economic output in 2024, up 7.39 percent year on year.
BeiDou is now compatible with 288 million smartphones, mostly produced by domestic brands like Huawei and Xiaomi.
China’s leading navigation apps – Baidu Maps and Amap – said they used BeiDou to guide users on journeys of a combined 4 billion kilometers per day.
To expand its reach in China’s consumer market, BeiDou is expanding its compatibility from smartphones and in-vehicle satellite navigation systems to wearables, drones, electric bikes and robots.
The China Satellite Navigation Office, aims to replace its existing constellation with new, more advanced satellites by 2035, with the next-gen satellites reportedly supporting real-time positioning accurate to within a centimetre.
The new satellites will provide precision positioning for deep-sea exploration and flights at altitudes far beyond those typically used by commercial aircraft, according to China’s media reports.
The National Association of State Aviation Officials provides opportunities for those engaged in aviation and unmanned aerial vehicles.
NASAO’s Annual Convention & Trade Show provides a space for state aviation directors and their staff to connect, collaborate, and become inspired. Not only does the annual convention provide hundreds of attendees with engaging sessions and demonstrations, it also gives them the chance to experience the state like a local.
The 2025 conference will take place in Grand Forks, North Dakota, Sept. 21-24, at the Dena’ina Civic and Convention Center.
Artificial intelligence (AI) has become part of the daily lexicon, and an endless stream of media reports assert that AI either has affected or will affect most aspects of human life. What is AI and what are its components? How is it being used in GNSS technology? What is the near-term potential of AI in GNSS/PNT? These are weighty, evolving questions for which this column attempts an initial synthesis.
AI definitions and descriptions vary widely. One general and broad definition from IBM (2025) is “Artificial intelligence (AI) is technology that enables computers and machines to simulate human learning, comprehension, problem solving, decision-making, creativity and autonomy.” The idea of thinking machines (Turing, 1950) and the term “artificial intelligence” were introduced in the 1950s (McCarthy, 2007). The 1960s and 1970s saw the development of neural networks. The 1980s brought advances in neural network training and deep learning. The 1990s saw rapid advances in computing power. Big data and cloud computing developments in the 2000s allowed for the management and analysis of large datasets. The 2010s brought deep neural networks/deep learning, and the 2020s have seen the introduction and flourishing of large language models.
This column primarily focuses on the impacts that AI is directly having and could potentially have on GNSS hardware and PNT solutions, including receiver signal acquisition, measurement processing, position estimation, integrity and mitigation of jamming and spoofing. Due to space limitations, it will limit discussion to topics such as GNSS-based sensor fusion, navigation system routing, application-specific customizations, etc., all of which are undergoing significant AI-related infusions. A suitable guide to consider is the list of tasks for which evolving AI approaches can outperform existing methods in meaningful and efficient ways. For example, in error modeling or optimal estimation, can AI-based techniques fill gaps in non- or only partially-deterministic processes?
Essential
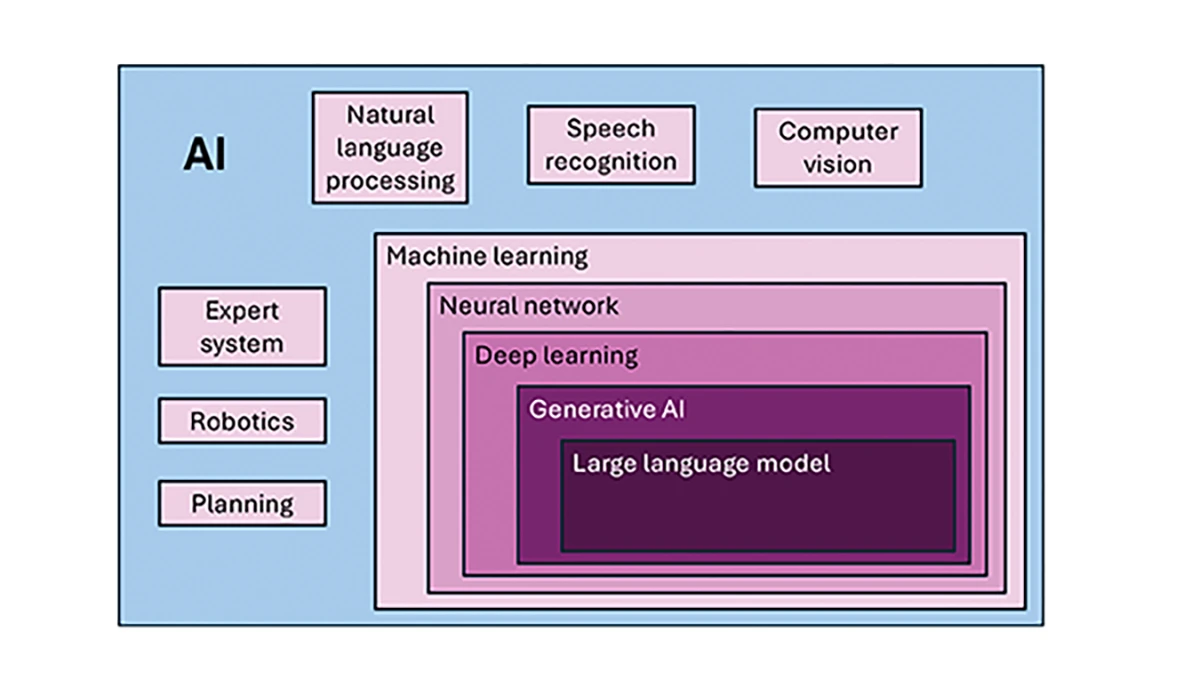
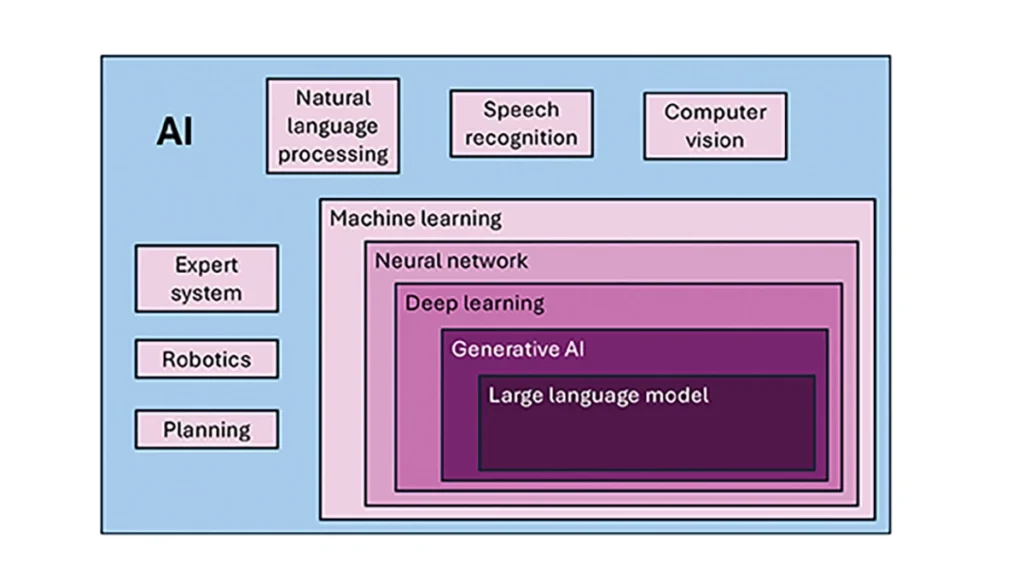
To investigate the current and potential uses of AI in GNSS, it is essential to define its components, especially as some terms are misused or conflated. The presented description is based on a wealth of Internet-based information, including from IBM (2025). Figure 1 illustrates the current broad concepts within, or subsets of, AI based on a synthesis of nomenclature used. In the figure, AI — defined here as a machine that exhibits human-like intelligence — is the superset. Within AI, there are many concepts or subsets that can be categorized, though they can overlap. There is perception intelligence, such as text and space recognition, and there is the broad area of machine learning.
Figure 1: Concepts within/subsets of AI.
Sophisticated processes have been developed and continue to rapidly evolve to give machines the ability to sense, learn and make decisions. Natural language processing (NLP) allows machines to recognize, understand and generate text following human language. Voice recognition is similar, in that the machine transcribes speech to text and back. Computer vision enables machines to interpret and analyze imagery. While robotics is a field of its own, within the superset of AI, it can be seen as an application of AI to motion. Planning refers to autonomously solving planning and scheduling problems. And expert system is the field of AI dedicated to simulating human expertise, judgment and behavior. All of these AI subsets are typically enhanced with machine learning (ML).
ML involves the development of algorithms and statistical models that can infer patterns (i.e., learn) from existing data without explicit instructions (i.e., rote training) and apply this knowledge to new data. Based on the learning approach, there are four types of machine learning algorithms: supervised, semi-supervised, unsupervised and reinforcement. (ML can also be classified by functionality.) Supervised learning uses manually labeled datasets to accurately train algorithms to classify data or predict outcomes. In semi-supervised learning and unsupervised learning, relationships are found with less or no explicit human interaction, respectively. Reinforcement learning combines these approaches with goal optimization. There are many types of ML techniques/algorithms, such as linear regression, logistic regression, decision trees, random forest, support vector machines, k-nearest neighbor and clustering, each designed for different types of problems and data.
Neural networks (NNs) or artificial neural networks are modeled after the human brain. A neural network model contains a given input layer and output layer, each with a set of nodes. These layers and nodes are interconnected with a set of hidden layers of nodes, with each node having a weight and bias, determined (i.e., estimated) based on the specified network inputs and outputs by utilizing one of a selection of optimization techniques. NNs can work well for tasks that involve identifying complex patterns and relationships given large amounts of data, though the details of specific parameter interrelationships cannot necessarily be determined by such models — therefore sometimes referred to as “black box” models. There are several types of neural networks, including convolutional NNs, long short-term memory networks, autoencoders, recurrent NNs, transformers, etc.
Deep learning refers to the depth of layers in a neural network. A deep learning model neural network contains at least three, but typically hundreds of hidden layers. Having many layers allows for unsupervised, fast and accurate identification of complex patterns and relationships. Generative AI can be described as deep learning models that generate new/original content, e.g., text, image or audio data through a variety of training, tuning and generation processes. Finally, large language models can read, understand and generate human language (refer to NLP), making use of all the functionality of ML.
Elements
How machine learning is used in GNSS
So, when should AI be used in GNSS/PNT tasks? A rudimentary answer is whenever AI can perform better (in some specified and measurable sense) than existing methods. The determination of this answer for a particular scenario requires research. From the descriptions of AI and its subsets, GNSS/PNT output is used in myriad AI applications such as sensor fusion, autonomous vehicle navigation, route planning, etc. However, it is primarily the ML subset of AI that is being researched for use in GNSS signal and measurement processing.
ML models can be categorized by their fundamental methodology, as either generative or discriminative, or by the tasks for which they are used: either regression or classification (IBM, 2025). Generative algorithms model the distribution of data points with the goal of predicting the joint probability of a data point appearing in a particular space, whereas discriminative algorithms model the boundaries between classes of data with the goal of predicting the conditional probability of a given data point being in a specific class. Regression models predict continuous values and are mainly used to determine the relationship between one or more independent variables and a dependent variable, whereas classification models predict discrete values and are mainly used to determine a category or class, e.g., binary or multi-class.
Siemuri et al. (2022) provide a comprehensive review of recent research (from 2020 through 2021) in which ML techniques are used in GNSS problem solving and provide a categorization of GNSS use cases. Relevant key findings include: 1) ML is proposed to increase GNSS/ PNT robustness under degraded signal environments; 2) more than 200 studies were assessed; 3) in most cases, the ML approaches outperformed (at varying levels of significance) the traditional GNSS models; and 4) industry adoption of ML in GNSS so far appears limited. The analysis found that neural networks were used in more than half of the studies (55%) — including some deep learning, while support vector machine and decision tree/random forest techniques were used in 19% and 10% of the studies, respectively. Use cases for machine learning in GNSS were categorized as: i) signal acquisition; ii) signal detection and classification; iii) Earth observation and monitoring; iv) navigation and positioning; v) denied environments and indoor navigation; vi) atmospheric effects; vii) spoofing and jamming; viii) GNSS/inertial integration; ix) satellite selection; and x) LEO satellite orbit determination and positioning.
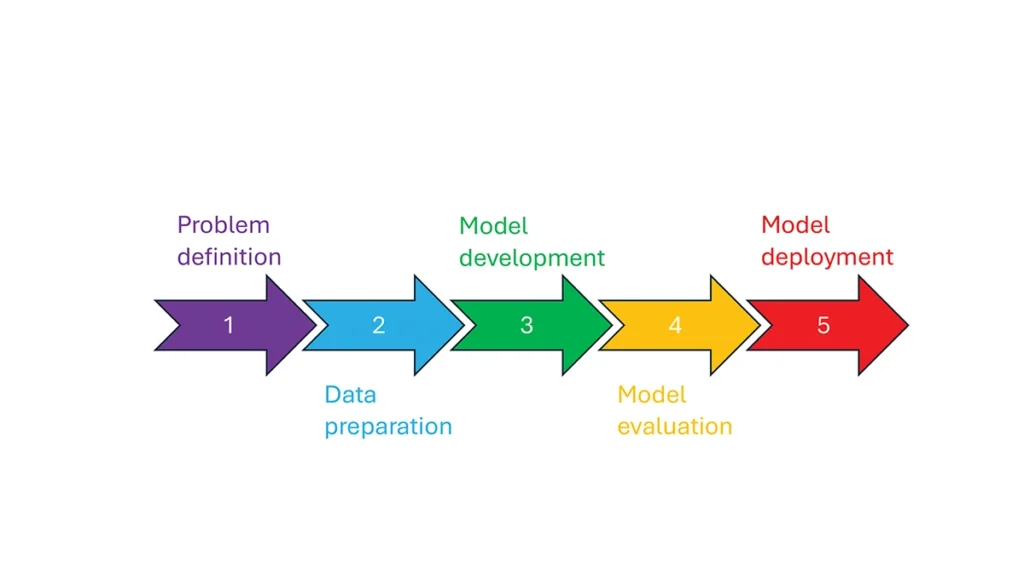
So, how is machine learning used in these GNSS/PNT use cases — and in general? How ML is applied can be described as a set of steps or a cycle with a varying number of components. Figure 2 presents a graphical synthesis from the literature, with a grouping of five core steps.
Step 1 — problem definition: understanding the problem(s) and goals, defining the available data, defining the problem inputs and outputs, determining the category of ML to use and selecting evaluation metrics.
Step 2 — data preparation: collecting the data, editing them, and labeling them if employing supervised classification.
Step 3 — model development: selecting the algorithm, selecting the model, building the model and training the model.
Step 4 — model evaluation: validating the model, tuning the model, analyzing the results, cross-validating the results and applying the evaluation metrics.
Step 5 — model deployment: finalizing the model, applying the model in prediction, and, if necessary, feeding back into the start of the cycle.
Figure 2 Steps in, or cycle of, machine learning implementation.
The scikit-learn (2025) library is a popular resource for Python-based ML information, tools and examples. An illustrative example of how ML can be used in GNSS for signal classification and measurement weighting is given by Li et al. (2023). The authors describe the process for designing the ML problem-solving scenario, selecting the models that are either of the regression or classification type and comparing the performance of many popular ML models to detect direct line-of-sight versus non-line-of-sight and multipath signals in urban environments. Note that most applications of machine learning in GNSS involve some form of supervised classification.
Initial and potential machine learning uses in GNSS
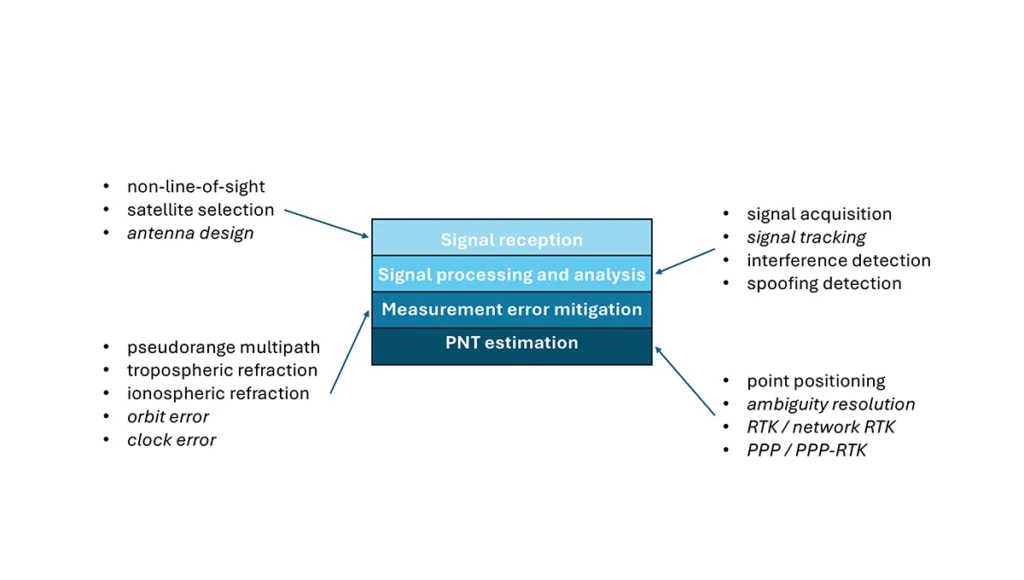
For this column, a brief synopsis is given of the use of machine learning in GNSS in the context of the application themes of signal reception, signal processing, measurement error mitigation and PNT estimation, as illustrated in Figure 3. Correspondingly, potential ML uses are also considered.
Figure 3: Application themes of machine learning in GNSS with initially studied and potential research areas.
Signal reception
Studies including Tsu (2017) and Li et al. (2023) have used various machine learning models to differentiate between line-of-sight, non-line-of-sight and pseudorange multipath GNSS signals in urban environments. Various input features, such as signal strength, are used to train models, resulting in majority accurate classification. ML has been used to optimize satellite selection (rather than using all available tracked satellites) for efficient PNT processing. Radio frequency hardware and software simulators can use ML to improve the realism of propagated signals in various environments and under different dynamics, including multipath, interference and spoofing. There is also the potential for ML to be used to improve antenna design, including for controlled radiation pattern antennas that generate one or multiple nulls.
Signal processing and analysis
Deep learning models have been used for signal acquisition and show improvement over current methods with simulated data (Borhani-Darian et al., 2023). There may be potential for the use of ML in signal tracking or in the design of new tracking algorithms and processes. Studies have shown that ML can be used to detect natural and intentional radio frequency interference. Various ML models have successfully been used to produce accurate classification of radio frequency interference jammer types (e.g., Morales Ferre et al., 2019). ML has also been used to detect signal spoofing with simulated and real signals with high levels of validation (e.g., Semanjski et al., 2020).
Measurement error mitigation
As GNSS multipath is a non-deterministic (and non-zero mean) process, it is a strong candidate for machine learning-based mitigation, especially meter-level pseudorange multipath (compared to centimeter-level carrier-phase multipath). Such studies, combined with non-line-of-sight classification, have been described in the previous section.
Initial investigations of the use of machine learning in the mitigation of tropospheric refraction appear promising (e.g., Łoś, et al., 2020). The wet tropospheric delay on GNSS signals is irregular, making it difficult to predict. Therefore, there is great potential for improved anomaly detection, refraction modeling and more accurate severe weather nowcasting.
As with tropospheric refraction, ionospheric refraction, while well understood, is difficult to model accurately, especially during periods of high solar activity. Machine learning has been shown to accurately detect anomalies and scintillation (e.g., Linty et al., 2018) and potentially for nowcasting.
There is the potential to improve GNSS satellite orbit and clock estimation with ML, as these are both well-defined processes, but also contain levels of process uncertainty. For example, it is usual to include once-per-orbital revolution empirical accelerations in orbit estimation states, and satellite force models can always be improved. Consequently, ML studies may aid in such GNSS network processing to improve the accuracy of real-time and post-processed correction products.
PNT estimation
Well-established optimal estimation techniques such as least-squares and Kalman filtering work extremely well for most GNSS/PNT estimation cases. However, hardware limitations and environmental conditions can lead to measurements not meeting the technical assumptions of these conventional approaches, e.g., the use of independent measurements, the absence of systematic errors, the absence of gross errors, the use of realistic measurement variances, etc. Deep learning models have the potential to improve GNSS point positioning (e.g., Kanhere et al., 2022) in test data, if poor model numerical conditioning, changing satellite visibility and model overfitting are managed. There is potential research in the use of machine learning methods to improve carrier-phase ambiguity resolution, and in the centimeter-level positioning techniques of real-time kinematic (RTK)/network RTK, and precise point positioning (PPP)/PPP-RTK.
Broader AI/ML use within GNSS-based PNT
Clearly, GNSS/PNT outputs are used in a broad spectrum of applications, for which AI and ML are currently being used or have the potential of being used to attain and enhance goals. Machine learning has been used to improve GNSS-derived position time series analysis for many Earth science applications, including in plate tectonics, tsunami monitoring, vulcanology, subsidence monitor, GNSS reference station monitoring, overall measurement integrity, etc. and in diverse GNSS-enabled techniques such as radio occultation and reflectometry (Siemuri et al., 2022).
ML has the potential to allow for improvements in sensor fusion, chief amongst these being GNSS/inertial measurement unit (IMU) integration. Improvements can be found in IMU calibration and in managing functional and dynamic mismodeling for specific user applications. Wider, multi-sensor fusion, such as for simultaneous location and mapping solutions, rely heavily on ML approaches, such as reinforcement learning.
Finally, GNSS-based PNT is used in most of the non-ML subsets of AI. GNSS-based position information is central to many outdoor robotics, planning and computer vision algorithms, providing either seeding localization information for other sensors or processes, or core position information for the overall AI-driven system.
Machine learning resource considerations
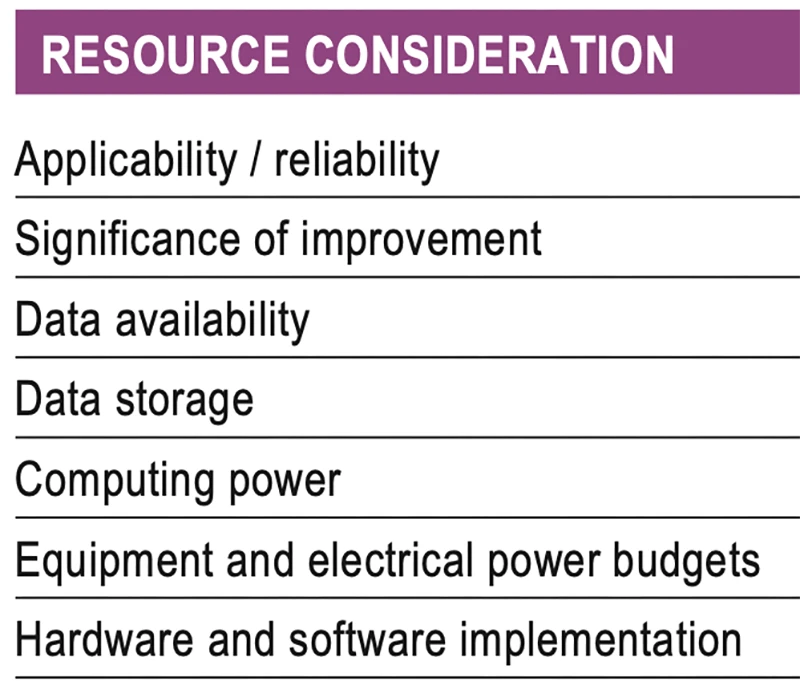
As with all technology, a cost/benefit analysis is required when considering the application of ML in a specific GNSS use case. Table 1 summarizes the broad considerations. Can the problem at hand be reliability mitigated with ML, in the sense that there are complexities that are difficult or impossible to physically model, but sufficient patterns in the data to be modeled by ML? If ML can outperform a conventional approach using specified metrics, is the improvement significant to the user? Are there large enough, i.e., sufficient and varied, datasets to train a model for prediction over expected data variations? As most ML algorithms require large amounts of computing storage for large datasets, typically from data servers, can the necessary computing power be brought to bear? Similarly, given that most ML algorithms require large amounts of computing power for myriad computational operations, typically utilizing graphics processing units (GPUs), is such computing power available? As storage servers for large datasets and GPUs for processing are expensive and require large amounts of electrical power, are the financial and electrical power, environmental and security resources available? And finally, how practical is it to implement the ML model on user equipment or via servers?
Table 1 Resource considerations for machine learning use in GNSS.
Evolutionary
AI is a broad field that is rapidly developing and entering service in most technologies. While AI includes many subsets such as computer vision, natural language processing and robotics, the ML subset (which includes neural networks, deep learning and generative AI) has the most direct applicability to GNSS/PNT. Of the available ML models used in GNSS, most are supervised (i.e., they use labeled training data), and the majority use neural networks. Initial studies of applications such as signal classification and interference detection indicate that supervised ML models perform better than traditional approaches.
Many subsets of AI, such as computer vision and robotics, rely heavily on ML, while GNSS/PNT has only recently seen investigations in ML use. For many applications, it can be that conventional deterministic models, physics-based models or optimal estimation techniques work well and reach desired performance standards. However, as GNSS/PNT continues to trend to lower cost hardware, harsher environmental conditions and increasing safety-of-life usage, PNT outliers and corner cases grow in importance, and ML can potentially provide solutions, as outlined in Figure 3. These are the early days of investigating and applying ML in GNSS/PNT. To use ML or not to use ML — that is the question. There are many factors to consider, as described in Table 1. Performance improvements over current approaches and operational practicality (i.e., costs) will dictate ML adoption. Much more research is required in many GNSS/PNT applications, followed by significant wide-spread testing and tuning of developed ML models. It is difficult not to predict the near-term adoption of ML in at least some GNSS/PNT use cases, if they will benefit our daily lives. Look for future columns that will examine and investigate ML implementations in specific GNSS/PNT applications that prove its efficacy.
Honeywell has expanded its navigation portfolio with the HGuide o480, a high-performance, single-card inertial navigation system (INS) engineered to deliver precise, resilient localization and attitude data in a low size, weight and power package.
“The HGuide o480 is an engineering marvel and a technological breakthrough,” said Matt Picchetti, vice president, Navigation and Sensors, Honeywell Aerospace Technologies. “For the size, there are no competing products in the industry today that can achieve the same high-performance at the price point, in addition to having the ability to be augmented by the wide array of Honeywell alternative navigation capabilities to form a truly remarkable resilient navigation solution.”
The entire HGuide o480 product line is suitable for a wide range of industries, including the emerging small-factor unmanned aerial vehicles, autonomous ground and underwater vehicles, as well as an extensive range of aerial and terrestrial mapping systems for the geodetics industry.
The HGuide o480 can be integrated directly into the electronics stack of a range of applications requiring precise and robust localization. It can also reduce system size and integration complexity, enabling faster deployment and improved performance for unmanned and autonomous systems across air, land and sea. The system is fully compatible with multiple velocity aiding sensors, including the Honeywell Radar Velocity Sensor, and provides GPS-denied localization performance that is typically unavailable in similar systems.
Additionally, security is built into the fabric of the HGuide o480. Designed to perform in contested and GPS-challenged environments, the system features anti-jamming and anti-spoofing capabilities via Septentrio’s AIM+ technology included with the Mosaic global navigation satellite system (GNSS) receiver. The HGuide o480 is offered with both the triple-frequency Mosaic X5 in a single-antenna configuration and with the dual-frequency, dual-antenna Mosaic H for when GNSS attitude aiding is required. In both cases, the Mosaic delivers best-in-class real-time kinematic (RTK) GNSS performance.
The Department of Homeland Security’s Science and Technology Directorate has released a new tool designed to help protect critical infrastructure that relies on GNSS: The GNSS Test Vector Suite and Distribution Methodology.
The GNSS Test Vector Suite and Distribution Methodology, now available on GitHub, is designed to help infrastructure operators assess and improve the resilience of their positioning, navigation and timing (PNT) systems. These systems are essential for sectors such as energy, transportation and telecommunications, and are vulnerable to disruptions from natural events, technical failures or cyber threats.
The tool suite provides standardized test scenarios and simulated data, allowing users to evaluate how their equipment responds to challenges such as signal interference or spoofing. By generating and converting simulated data into signals that mimic real-world GNSS systems, the tool enables independent testing of devices and systems for conformity to resilience standards.
“Accurate and precise Positioning, Navigation, and Timing information is vital to the nation’s critical infrastructure and is the backbone of the many services we depend on daily, from keeping our lights on to ensuring planes land safely,” said Julie Brewer, DHS acting under secretary for science and technology. “This new toolset gives people responsible for safeguarding these systems a way to independently test and strengthen them, ensuring our nation’s infrastructure is more secure against potential disruptions.”
The release of the GNSS Test Vector Suite supports Executive Order 13905, which seeks to protect essential PNT services across critical industries.
The combination of ST’s Teseo chipsets with FocalPoint’s S-GNSS Auto software delivers enhanced GNSS accuracy in challenging environments
FocalPoint, a UK software company providing next-gen positioning solutions for automotive, wearables and smartphones, has announced a strategic collaboration with STMicroelectronics, a global semiconductor leader serving customers across the spectrum of electronics applications.
The joint offering provides automotive OEMs a combined solution that enhances navigation performance by improving GNSS reliability and accuracy — key to making autonomous vehicles safer.
Within this collaboration, FocalPoint will integrate its S-GNSS Auto software, powered by Supercorrelation technology, onto ST’s Teseo devices, known for their high performance and multi-constellation support. Combined with S-GNSS Auto, they will offer next-level industry-leading reliability and accuracy, surpassing other commercially available options.
GNSS is an important component in advanced driver assistance systems (ADAS), providing absolute location data. However, its accuracy is compromised in urban canyons and forested roads due to signal interference. S-GNSS Auto transforms GNSS into a reliable, high-performance sensor in these challenging scenarios. This allows automakers to harness the full potential of GNSS and confidently extend the operational range of hands-free driving beyond open-sky roads. Delivered as a simple firmware update to the Teseo device, S-GNSS Auto is cost-effective and easy to adopt.
This engagement is a significant milestone in the growth and demand for FocalPoint technology that follows a recent strategic investment from GM Ventures and collaboration with General Motors.
Key findings from the collaboration show that the combined solution of ST’s Teseo devices and FocalPoint’s S-GNSS Auto enhances measurement accuracy by up to four times and position accuracy by up to three times (in challenging multipath environments).
Contact FocalPoint at [email protected] for the full results report.
PTx Trimble, formed as a joint venture in 2024 by AGCO and Trimble, is providing a new GNSS receiver for precision autoguidance: the NAV-960 guidance controller. The agriculture controller improves positioning accuracy and availability to deliver greater uptime while providing the computing power to support complex field operations and handle future developments.
The PTx Trimble NAV-960 offers farmers an upgrade to its predecessor, the NAV-900, with a host of improvements, including enhanced speed, higher processing power and improved positioning performance. Using this receiver, farmers can handle the most complex and demanding applications for guidance and steering, creating improved uptime and the flexibility to seamlessly run field operations. This enables greater efficiency and boosts productivity.
Benefits to farmers include saving on inputs from reduced overlap and less downtime that decreases operational delays and improves machine utilization, aimed at reducing operator fatigue during long planting days and improving overall productivity. Using the NAV-960 as part of a complete autosteering solution allows operators to focus on the fieldwork as it happens and allows growers to get work done faster, reducing wear and tear on equipment.
With its cast aluminum base and sleek design, the NAV-960 is built to withstand tough farming environments, including searing heat, freezing cold, driving rain, persistent dust and everything in between. The additional processing power of the upgraded CPU ensures compatibility and readiness for fieldwork.
New features include:
Patented industrial design with rugged, dust-, water- and vibration-resistant base
Enhanced GNSS engine to track more satellites than ever before, paired with enhanced inertial sensors, provides up to 50% improved vehicle positioning and line following performance compared to the NAV-900
Onboard Trimble ProPoint® technology with Trimble IonoGuard™ for maximum resistance to downtime caused by solar events and scintillation
Centimeter-level accuracy when used in combination with Trimble CenterPoint® RTX or RTK correction signals
Advanced quad core processor for extra power, faster calculations and improved data delivery speeds
Complete compatibility with current PTx Trimble steering systems, utilizing the same cables as the NAV-900 guidance controller
Onboard Wi-Fi and Bluetooth will make the NAV-960 easier to support for service teams and ready to embrace future enhancements across the PTx Trimble solution portfolio. As part of the company’s commitment to its retrofit-first, mixed-fleet strategy, the NAV-960 is fully compatible with all GFX series displays including the GFX-350, -1060 and -1260 models.
How Farmers Benefit
Farmers who implement the new receiver will see improvements from the start, including:
Increased uptime and profitability
Reduced overlap and lower input costs
Reduced labor costs by maximizing operator effectiveness and eliminating idle time
Reduced stress and fatigue during long days in the cab, decreasing operator mistakes and errors in judgement
The NAV-960 is available worldwide, providing a solid foundation for fieldwork today and is ready to handle technology developments in the future for both aftermarket and OEM installations.
For anyone out there who has ever worked through a formal process of equipment development for subsequent FAA/military or other national certification, you would likely appreciate the significance of a UAV approval milestone.
General Atomics (GA-ASI) has just provided notice that the Royal Air Force (RAF) Protector RG Mk1 — based on the MQ-9A Reaper unmanned aircraft system (UAS) — has been granted a Military Type Certificate, having demonstrated compliance based on the requirements of STANAG 4671, NATO’s UAS airworthiness standard.
RAF Protector RG Mk-1 (Photo: GA-ASI)
This is big news for the RAF and GA-ASI, which enables this large Class III UAS to fly almost anywhere, without restricting flight over cities and other densely populated areas, and most importantly, facilitating flight within civil airspace. New capabilities that have been added include lightning and fire protection, as well as anti-icing systems. The strong airframe is designed to withstand long-term operational stress and exhibit a level of resilience against the effects of multiple airborne combat missions.
The software and electronic hardware were developed in accordance with current industry standards, which are intended to ensure the safety and reliability of systems. However, overall, GA-ASI has invested more than half a million dollars of its own money over 11 years to achieve this approval. Extensive environmental testing included lengthy, complex static and dynamic load tests, and extensive simulations were undertaken to verify performance over the operating envelope of the aircraft.
If you have ever seen a static ground test rig for stressing and even over-stressing an airframe, the significant number of hydraulic jacks within a massive steel girder enclosure is something to behold. Just building the structure and tuning the electronic systems which drive it, and fixing things on the rig and the airframe as tests progress over many months — this is a significant undertaking and investment.
The RAF has so far taken delivery of 11 of the 16 Protector UAS under order, and this certification is a major milestone on the way toward operational deployment. For General Atomics, this initiative hopes to not only lead to further military organizations purchasing an MTC-qualified UAS but also to open the door for civilian qualification options.
In the meantime, Joby Aviation in Santa Cruz, California, has just achieved a major milestone on the way to civil certification of its electric Vertical Take Off and Landing (eVTOL) passenger aircraft. With orders and sponsorship from Delta, Toyota, Uber and many others, the company is working toward piloted and autonomous flying taxis.
Joby’s eVTOL piloted transition from vertical to horizontal (Photo: Joby)
The major event involved an onboard pilot flying the eVTOL from a vertical takeoff through the transition to horizontal, wing-borne flight. This clears a major hurdle along the path to civil certification, enabling FAA pilots to be on board to monitor operations and fly the eVTOL.
The Joby test pilot first flew this production aircraft on April 22, with all the propellers horizontal and lifted off to about 30ft, just as a helicopter would take off. After a brief pause, the engine nacelles were rotated gradually forward and the eVTOL slowly crept forward. Traveling approximately 500 yards, the transition to wing-borne flight occurred as speed increased, and eventually, the climb-out began.
After several repetitions with two other test pilots, the piloted transition process was considered ready for operations and the next chapter was on the way to initial validation testing and air-taxi operations, which will be in Dubai.
Since 2017, Joby has flown a number of its eVTOL aircraft for a total of over 40,000 flight hours, with ground-pilot control, and with an onboard pilot in hover and forward flight. However, the transition phase has never been flown with an onboard pilot in full control. So that means presumably that all previous transitions had been controlled externally from the ground. This puts Joby well on the road to certification — other eVTOL manufacturers have made crewed transitions, but with separate propellers for lift and for forward flight – this is the first with one set of tilting propellers which is a principle operational feature of the Joby eVTOL.
AeroVironment (AV) supplies a wide variety of UAS to the U.S. and other militaries. Nevertheless, the company has recently released information about a new one-way drone, which features enhanced capabilities, bringing forward “new, innovative solutions and improvements,” according to the release. This latest contender is apparently equipped to accept software upgrades throughout its design lifetime to continuously add more capabilities and specializations.
The Red Dragon UAV differs in that it is claimed to be fully autonomous (when circumstances require it) and can navigate in GPS-denied environments.
Red Dragon UAV illustration (Image: AV)
Given that modern battlefields are an electronic nightmare for GNSS navigation and control/data channels, AV has endowed Red Dragon with a hardened GPS baseline system, augmented by visual navigation, digital scene matching and automatic target recognition, and also using airspeed and laser rangefinder inputs. When necessary, the UAV can continue to track its target without requiring satellite control signals. There is a return link back to the operator, but when that link goes down, Red could proceed alone, or optionally crash-land if targeting doesn’t meet pre-programmed parameters.
Carrying a 5lb charge, Red is not designed to return to its owner, rather to deliver a penetrating destructive explosion. Even if doesn’t self-destruct, no-one wants this package back, its completely disposable. With a 250-mile range flying at 50 mph to 60 mph, the UAV can accelerate at up to 100 mph in the final phase of its attack.
Built simply for ready use in the field and to greatly reduce unit volume manufacturing cost, this new one-way munition may be the result of lessons learned during recent battles – possibly just what forces think they need through the use of already combat-proven attack drones such as the AV Puma and Switchblade. It is reported that Red Dragon may have already experienced actual combat.
To recap, General Atomics’ most recent Reaper variant is now ready to fly almost anywhere with its very own UK MTC certification, Joby’s tilt-rotor eVTOL has cleared the piloted transition hurdle and AeroVironment has released a new kind of loitering munition with autonomy and GPS-denied navigation capability — both military and civilian UAVs at the forefront of unmanned evolution.
SpaceX has submitted reply comments to the Federal Communications Commission (FCC) detailing how its Starlink low-Earth orbit (LEO) satellite system currently provides, and could further support, positioning, navigation, and timing (PNT) services. The filing is part of the FCC’s ongoing Notice of Inquiry (WT Docket No. 25-110), which seeks to promote resilient and diverse PNT capabilities across the United States in response to vulnerabilities associated with the nation’s reliance on GPS, such as the risks of jamming and spoofing.
The FCC’s initiative, titled “Promoting the Development of Positioning, Navigation and Timing Technologies and Solutions,” aims to explore both space-based and terrestrial alternatives to ensure the continuity of critical PNT functions for national security, public safety, and economic stability. The agency is soliciting input from stakeholders on technologies that could complement or serve as alternatives to GPS, with a focus on robustness, geographic coverage and resilience to interference.
In response, SpaceX noted in its comments: “One opportunity stands out as a particularly ripe, low-hanging fruit: facilitating the rapid deployment of next-generation LEO satellite constellations that can deliver PNT as a service alongside high-speed, low-latency broadband and ubiquitous mobile connectivity.”
SpaceX also states that it has already been working on a PNT system for its cellular Starlink service, which is currently in public beta and is set to launch through T-Mobile in July. SpaceX outlines several technical features of the Starlink system that they argue are relevant to PNT applications.
Starlink Architecture and Features
SpaceX also noted that Starlink terminals can already provide nanosecond-level timing accuracy and meter-level positioning by using time-of-arrival measurements from its satellites. These capabilities allow the network to support precise timing applications, such as cellular network synchronization, without relying on external GPS sources. Timing signals are derived from the LEO constellation and synchronized through Starlink’s broadband infrastructure.
The filing highlights the Starlink system’s architecture, which includes thousands of satellites in low Earth orbit for global coverage and short signal travel times. SpaceX points to its phased-array user terminals, which use directional antennas to enhance signal integrity and mitigate interference. The company also notes that Starlink employs end-to-end encryption, making its timing and positioning information less susceptible to spoofing or tampering. According to SpaceX, Starlink is already in commercial use by a variety of customers and has been tested by U.S. military and civilian users in environments where traditional GNSS signals are degraded. The company emphasizes that these capabilities have been demonstrated under real-world conditions, not just in theory.
A Layered Approach to PNT
Addressing the FCC’s interest in a “layered” approach to national PNT resilience, SpaceX positions Starlink as one of several complementary solutions to enhance national PNT resilience. The company argues that using diverse, independently operated systems — both satellite and terrestrial — can provide redundancy and reduce dependence on any single technology or spectrum band.
SpaceX also responds to concerns from other stakeholders about whether Starlink qualifies as a PNT system, reiterating that the system was developed independently of government funding and can scale rapidly due to SpaceX’s vertically integrated manufacturing and launch model.
SpaceX confirms that Starlink operates in Ku- and Ka-band spectrum allocated for broadband services and is not proposing new spectrum allocations for PNT-specific use. It asserts that PNT functionality can be delivered within existing allocation.