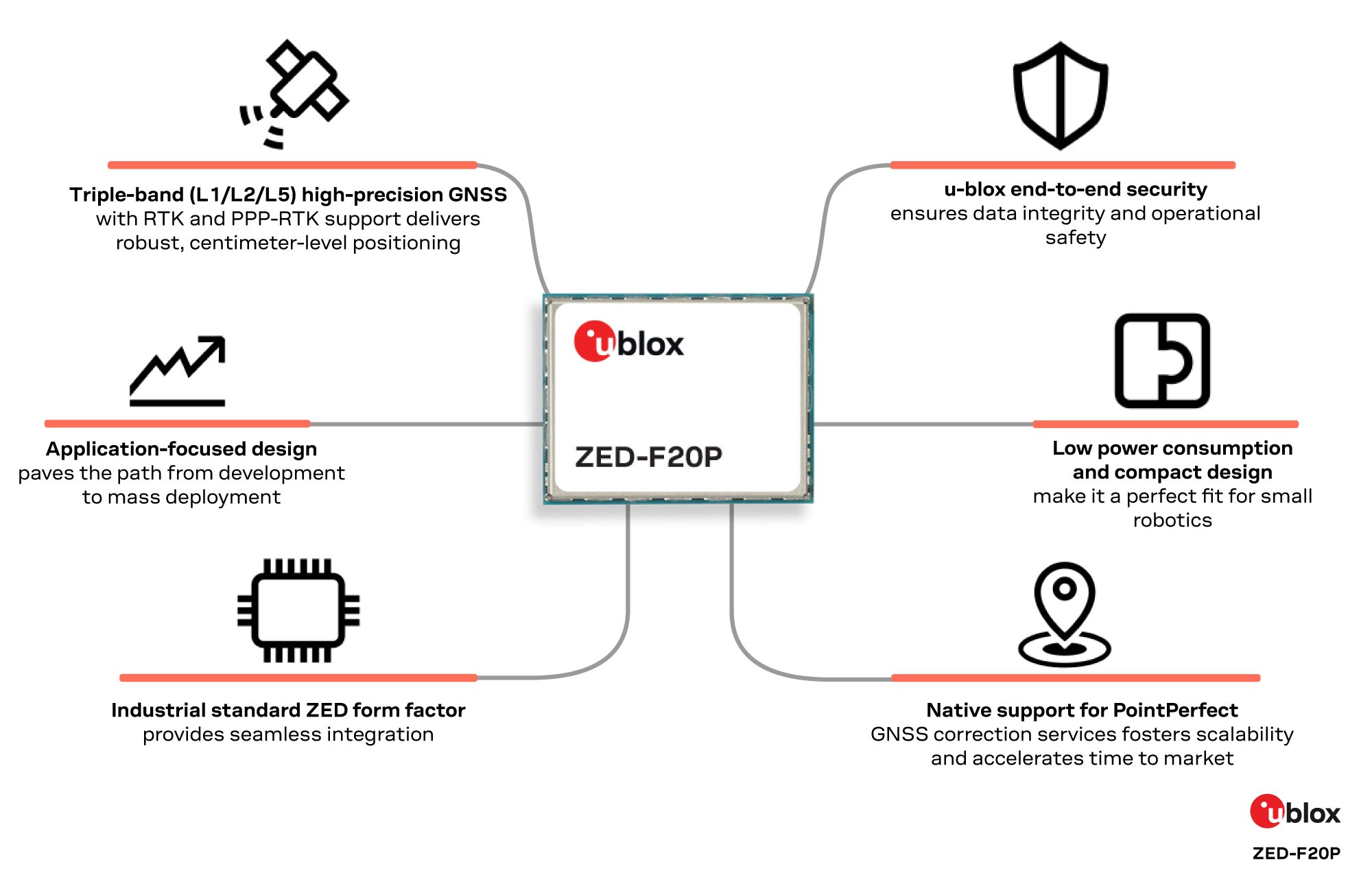
u-blox has expanded its ZED form-factor portfolio with the ZED-F20P, a L1/L2/L5 triple-band GNSS module designed for high precision applications in ground and air robotics.
The ZED-F20P provides OEMs deploying fleets of ground robots, drone light shows, and other dynamic autonomous platforms with centimeter-level RTK and PPP-RTK positioning, fast convergence times, and integrated security features.
Within the u-blox high precision receiver family, the ZED-F20P is a dedicated L1/L2/L5 triple-band specialist. It delivers deterministic, centimeter-level RTK and PPP-RTK accuracy tailored to the needs of lightweight and dynamic platforms. Its end-to-end silicon-to-firmware architecture supports 25 Hz update rates, robust security features, and low power consumption in a streamlined design.
These capabilities combine to deliver industrial-grade reliability and enable smooth scaling from proof-of-concept to high-volume deployment without increasing system cost, power consumption, or integration complexity.
Compatible with the established ZED footprint and UBX protocol, the ZED-F20P fits directly into existing layouts. The expanded ZED portfolio now covers dual-, triple- and all-band GNSS options, giving developers the flexibility to select the best fit while reusing the same board layout. This enables both flexible design choices and a straightforward upgrade from earlier products.
The ZED-F20P pairs with the u-blox ANN-MB2 all-band high precision antenna to ensure optimal RF performance, offering a one-stop solution for streamlined evaluation and integration. This consistent design approach accelerates time to market while preserving hardware and software continuity.
PointPerfect Flex and Live native support:
When combined with u-blox PointPerfect Flex and Live GNSS correction services, the ZED-F20P becomes a complete, production-ready GNSS solution that delivers centimeter-level accuracy in seconds, without the need for a local base station. The triple-band L1/L2/L5 architecture ensures rapid convergence and resilience in challenging environments, while PointPerfect provides reliable corrections across key regions. This tight integration simplifies development and accelerates time-to-market for mass-market autonomous platforms.
“The ZED-F20P delivers the precision and reliability required for today’s ground and air robotics,” said Mårten Ström, director of product management at u-blox. “It strikes a rare balance between performance, integration simplicity, and application-specific focus, enabling engineering teams to move from prototype to fleet deployment with confidence. We’re already seeing strong interest from robotic lawnmower markets preparing for large-scale rollout.”
Engineering samples of the ZED-F20P are available now. Developers can evaluate the module using the EVK-X20P evaluation kit, with a simple configuration.
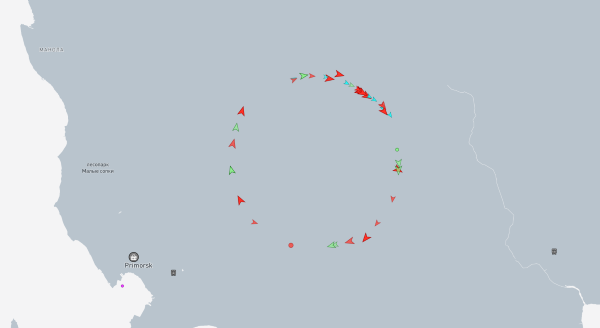
Russian jamming of GPS signals is suspected to be the cause behind a new “Bermuda Triangle” of navigation confusion in the eastern Baltic Sea.
In the Gulf of Finland, ships are disappearing from radar and Russian fighter jets are traveling through NATO airspace, according to Danwatch, a Danish news outlet.
Ship monitoring service MarineTraffic shows the position of ships in completely different places than their actual positions, currently on land east of coastal city Primorsk, Russia.
Experts say that not only is GPS being disrupted, but hackers are also manipulating navigation data. They blame Russia for its hybrid activities and attacks, which it carries out both from its mainland territory and from the Kaliningrad enclave, located between Poland and Lithuania.
Screenshot of MarineTraffic taken June 4, 2025, shows ships traveling in a circle on land, well east of the Baltic Sea.
Romania also has issues with Russian jamming and spoofing activities. The website Defense Romania quotes Gen. Gheorghiță Vlad, chief of the Romanian Defense Staff, who said jamming and spoofing has occurred on the Black Sea weekly since the start of Russia’s war with Ukraine. Also, Romanian defense forces have discovered 122 floating mines in the sea.
On June 1, 117 drones rose up from wooden boxes inside Russia and attacked bombers parked on runways at military bases. The attack — dubbed Operation Spider Web — startled the world with its audacity.
Approximately 41 planes were struck at four military bases, including the Belaya Air Base in Siberia hundreds of miles from Ukraine’s borders. In all, the attack destroyed a third of the bombers Russia uses as strategic cruise-missile carriers to destroy targets in Ukraine.
The drones were smuggled into Russia via commercial trucking transportation.
According to an analysis by Michael C. Horowitz for the Council on Foreign Relations, the strikes “once again demonstrated Ukraine’s ability to be at the cutting edge of technology and tactics. Ukraine has consistently and successfully leveraged and integrated everything from old military technology and off-the-shelf commercial systems to artificial intelligence (AI) for its military operations. This has been a difference maker in the war since its early days, giving Ukraine new and unexpected vectors to attack Russian forces and territory.”
The analysis, by Michael C. Horowitz, calls this a new era for warfare — the era of precise mass. “The combination of AI and autonomous weapons, precision guidance, and commercial manufacturing mean that low-cost precision strikes are now accessible to almost any state or militant group,” Horowitz writes.
The attack demonstrates that countries can be at risk to drone attacks even deep inside its borders, and precision strikes the capability of any actor. Low-cost off-the-shelf drones can be readily used, along with open-source autopilot software and AI code. Drones can supplement or even replace traditional artillery or expensive cruise missiles.
PEAK System has introduced the PCAN-GPS Pro FD, a configurable sensor module for measuring the position, attitude and acceleration of objects. It has a robust aluminum housing suited for measurement in harsh environments.
The device is equipped with a powerful microcontroller (M7/M4 dual-core), a magnetic field sensor, a three-axis gyroscope, a three-axis accelerometer, and the u-blox NEO-M9N satellite receiver for GPS, Galileo, BeiDou, GLONASS, SBAS and QZSS. It delivers satellite navigation measurement data with update rates of up to 25 Hz.
The module transmits the sensor data via two parallel LEMO circular connectors via CAN 2.0 A/B (40 kbit/s to 1 Mbps) or CAN FD (40 kbit/s to 10 Mbps). The PCAN-GPS Pro FD is configured via USB-C using Windows software (included in delivery), after which the module operates as a standalone CAN node. The aluminum profile housing (IP50/IP54 with sealing connectors) ensures high protection and easy integration.
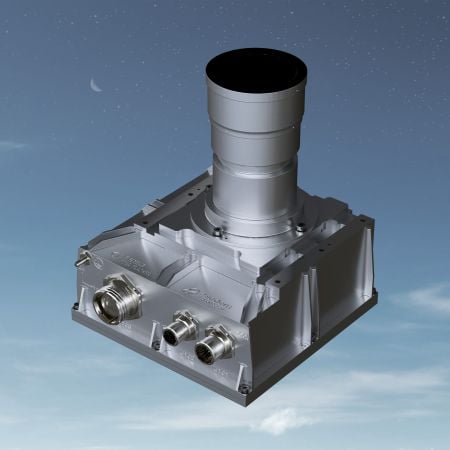
Sodern announces the commercial launch of Astradia, a daytime star tracker which, when combined with an inertial navigation system, allows more precise and robust navigation under GNSS-denied environments.
Specifically designed for civil and military aircraft, Astradia can operate day or night guided by stars. Astradia offers tracking capacity to within a few arc-seconds, equivalent to 1 meter at a distance of 70 km. This function, which is extremely useful for aligning inertial navigation systems or its registration during mission, opens the door to applications with demanding tracking requirements, including stealth missions.
The sensor delivers measurements to the aircraft without interruption, providing operational capacity at any point on Earth, including over the oceans, with no need to update maps or charts in order to carry out the mission. This sensor effectively reduces navigation drift during long flights and more generally improves the security of in-flight positioning.
Astradia is an endo-atmospheric star tracker that provides daytime and nighttime attitude measurement, for precise, robust and reliable onboard geopositioning data. It helps counter the natural drift in inertial navigation systems. It also offers the advantage of emitting no waves, which could otherwise expose an aircraft to detection.
Astradia is compact (176 mm x 185 mm x 207 mm) and weighs less than 3 kg. It was specifically designed for easy integration on all types of aircraft. This optimized design makes Astradia ideal for a wide range of applications, including drones and surveillance aircraft.
Several thousand of Sodern’s star trackers are already in service, along with a star catalogue and proven detection algorithms. This technology has also undergone conclusive in-flight testing.
Astradia will be featured at the Sodern stand during the 2025 International Paris Air Show.
Calian GNSS has released its next-generation anti-jamming controlled reception pattern antenna (CRPA), the CR8894SXF+.
The CR8894SXF+ is an advanced CRPA, engineered to provide efficient interference protection and real-time situational awareness across critical infrastructure, marine, and defense environments where GNSS continuity is mission critical. The CRPA is specifically-designed to provide a low-power and lightweight solution in a compact size.
It features advanced in-band null forming to protect GPS L1/L2 and Galileo E1/E5b signals, helping ensure resilient positioning, navigation and timing in environments with contested, congested or degraded radio frequency conditions. The antenna incorporates Calian’s eXtended Filtering interference mitigation technology to maintain performance and reliability when RF threats are present.
The CRPA supports in-band null-forming of 20 dB to 40 dB and out-of-band rejection up to 80 dB across 700 MHz to 2,500 MHz. It includes two independent low-noise amplifier channels, allowing continued operation if one signal band is compromised.
The antenna forms nulls in both upper (L1/E1) and lower (L2/E5b) GNSS bands to actively suppress jamming sources. A serial output interface provides real-time feedback, enabling users to monitor RF conditions and system status. Outputs include:
CRPA state: open (no jamming), protected (jamming mitigated), or closed (jammed but protected)
Jammer characterization: azimuth and elevation angles of detected interference sources
Summary of threat signals, offering rapid threat assessment for command and control
The CRPA series aims to set a new benchmark in operational resilience, offering advanced protection and intelligence for mission-critical GNSS applications.
My previous newsletter highlighted a National Geodetic Survey (NGS) webinar held on April 25, 2025, titled “Design of Networks Using NOS NGS 92,” given by Dave Zenk, NGS northern plains regional advisory.
[Authors note: Dave Zenk told me that he is retiring from the National Geodetic Survey on May 31, 2025. Dave’s presence will be deeply missed. His dedication and spirit have left a lasting impact on NGS’s products and services. I hope his retirement is filled with joy, relaxation, and new adventures.]
In addition to Dave Zenk’s retirement, several other NGS Regional Geodetic Advisers have retired or left NGS employment over the past several months. Click here for a list of the current advisors, along with the names of interim contacts handling inquiries for those advisors who have retired or departed from government service.
As previously mentioned, Dave showed a well-presented outline of the tables that users need to be familiar with when using OPUS Projects to process and submit GNSS projects to NGS for publication. It should be noted that users submitting data to NGS must follow the guidelines outlined in NOS NGS 92.
I found the webinar to be very informative, and I would encourage all users of OPUS Projects to download the presentation. During the webinar, Zenk briefly mentioned three items that I believe deserve more explanation for anyone using OPUS Project. This newsletter will address the following topics in more detail:
The mark’s classification — primary, secondary, and local — will not be included on the NGS datasheet, but the local and network accuracy from the project will be provided on the datasheet. What does this mean to someone who’s using the mark in their project?
OPUS Project uses the F-statistic test to determine if the appropriate constraints were imposed during the horizontally and vertically constrained adjustments. Why does OPUS Project use this statistic?
The Constraint Ratio (CR) test, computed by OPUS Projects, provides a method for identifying which coordinates should be constrained and which should not be considered for constraints in the final horizontally and vertically constrained adjustments. What’s the best way to use this table?
First, the presentation discussed the tables that described the procedures for establishing three different mark classifications — primary, secondary and local. It also mentioned that the classification will not be included on the NGS datasheet but the local and network accuracy from the project will be provided on the datasheet. See the image below.
Photo: NGS website
What does this mean to someone who’s using the mark in their project? Since the NGS data sheet will provide the network and local accuracy from the project, users can determine if the accuracy value of the mark meets the requirements of their project. In my opinion, the network and local accuracy from the project provide a better indication and understanding of the level of trust of the published coordinate.
As previously mentioned, anyone submitting a GNSS project to NGS for publication must adhere to the NOS NGS 92 guidelines. During the presentation, Zenk provided several examples that depicted correct network designs. I would encourage everyone to download the NOS NGS 92 document and Zenk’s presentation to gain an understanding of the classifications and the network design requirements to meet a particular classification.
Adhere to NOS NGS 92 guidelines (Photo: NGS website)
Anyone who submits an OPUS Project to NGS for publication knows that the constrained adjustments must meet the requirements of the F-statistic test. So, what is this test, and why does OPUS Project require this statistic? Essentially, it is a method of verifying whether the appropriate constraints were applied during the horizontally and vertically constrained adjustments. The F-test evaluates the ratio of two variances; that is,
The F-test checks whether this ratio is significantly different from 1, which would suggest the models have significantly different fits to the data. The result is compared against the critical value from the F-distribution based on the degrees of freedom from the constrained adjustment and the degrees of freedom from the minimally constrained adjustment, and a chosen significance level alpha (e.g., 0.01). NGS OPUS Project uses an alpha level of 0.01% or 99% confidence level.
Once the adjustment has been deemed acceptable i.e. all shifts and residuals are reasonable, the F-test should pass. The F-test is a statistical test that helps determine if the variance (variance of unit weight) from a fully constrained adjustment is significantly different from the variance (variance of unit weight) of a minimally constrained adjustment. The variance of unit weight is a critical statistic and should be looked at carefully when evaluating adjustment results. If the fully constrained adjustment fits well with all selected control (the constraints), the value of the variance of unit weight should be close to 1.0. The F-test is performed using a 99% confidence level.
So, if the constrained adjustment statistics differ significantly from the minimally constrained adjustment, then there could be an issue with the constraints. Of course, this is assuming that the minimally constrained adjustment variance of unit weight indicates that all data outliers have been eliminated. So, why are constraints important?
OPUS Project first calculates GNSS coordinates in a minimally (free) network adjustment, which defines relative positions but not their absolute placement in space. Without constraints the entire network can float and/or rotate.
Constraints are important in GNSS network adjustments because they:
Anchor the network in a geodetic datum; in this case, NAD 83 (2011), epoch 2010.0.
Ensure a unique and stable solution that reflects the physical world.
Make the network useful for engineering, mapping, and scientific purposes.
Control point coordinates (from previous surveys or known datums) often have inherent errors or uncertainty. Constraining coordinates exactly assumes zero error, which is rarely true. Weighted constraints let you assign a realistic level of trust to known published coordinates by using error estimates. OPUS Project applies weighted constraints based on input error estimates (OPUS Project denotes these as sigmas of the coordinates), which allow for minor deviations in the constrained coordinates. The weighted constraint methodology provides flexibility to network adjustments by recognizing that published coordinates have some uncertainties and allows constraints to take on small corrections leading to more accurate and consistent network solutions. Although, it should be noted that the adjusted coordinates of the constraints from the final horizontally constrained adjustment are not updated in the NGS database even though there are minor deviations to their final adjusted values.
If the F-test fails, it is due either to the errors (sigmas) of the constraints being overly optimistic (too small) or the constrained coordinates not agreeing with the observations (causing excessively large shifts of the constrained coordinates). Failure of the F-test does not automatically mean the constrained adjustment is bad. It is a flag that indicates there may be a problem with the constraints, and that they should be investigated. In addition, the F-test assumes of a normal (“bell-shaped”) probability distribution of the residuals. Networks with a distribution that is significantly non-normal may fail for that reason, even when a constrained adjustment is acceptable.
if your adjustment fails the F-test, what do you do? How do you determine which constraint or constraints should be unconstrained? OPUS Project provides some information about the constraints that can be helpful in determining a bad constraint. The CR test, computed by OPUS Projects, provides a method for identifying which coordinates should be constrained and which should not be considered for constraints in the final horizontally and vertically constrained adjustments. What’s the best way to use this table? The box titled “Constraint Ratio” from NGS’s Online OPUS Project User Guide — (Section 12.7.3.2. Analyzing the Horizontal Constrained Adjustment) provides a good explanation with an example of using the constraint ratio table (12.7.3.2. Analyzing the Horizontal Constrained Adjustment). Basically, this statistic highlights coordinate shifts that are significantly larger than expected based on the sigma provided by the user. That is, coordinates that have a very small sigma should not be expected to change as much as coordinates with a very large sigma. The CR value is compared to a critical value of 3.0, which corresponds to a t-statistic at the 99% confidence level. Therefore, any constraint ratios greater than three should be investigated and are candidates to be unconstrained (see the box titled “Constraint Ratio”).
Constraint Ratio
If the F-test fails, it is possible that some constraints need to be freed up. It might be the case where some of the shifts are too large. The CR test provides a way of identifying where the bad shift might be. The CR is essentially a Students T Test, with the absolute value of the shift between the adjusted, constrained coordinates and the published coordinates, divided by the sigma (σ, or standard deviation) used to constrain the station. It is computed for each component (north, east, and height):
OP provides the CR for all marks in the final table in the output summary given in the body of the email or in the Processing Report (.txt), as shown below in Fig. 12.21.
Fig. 12.21 Constraint Ratio Test as seen in the Processing Report of the Horizontal Constrained Adjustment. (Photo: NGS)
Computed CRs are compared to the critical value or 3.0, corresponding to a T-statistic at a 99% confidence level. If the value of CR is greater than 3.0 for any of the three components, that indicates that there may be a problem with the constrained station.
I find these statistics very helpful when determining which coordinates should be constrained in the final adjustments. I hear that some users select all possible constraints and then start releasing marks based on the CR table. That certainly is one way of doing it but could be time-consuming and confusing. That said, the first thing I do is compare the minimally constrained adjusted coordinates to the published coordinates to determine if there are any obvious outliers. This has been helpful to me in large GNSS projects located in subsidence regions such as the Harris-Galveston, Texas, region of the United States.
One final note on OPUS Project
On May 22, 2025, NGS issued a notice to users, announcing the implementation of the International Terrestrial Reference Frame 2020 (ITRF2020). The announcement provided the following information addressed to all Active OPUS Project Users.
Active OPUS-Projects Users,
In early June, NGS will implement the new International Terrestrial Reference Frame 2020 (ITRF2020) and IGS20 realizations in the U.S. National Spatial Reference System (NSRS) in order to maintain consistency with the International Earth Rotation and Reference System Service (IERS) and the International GNSS Service (IGS) reference frames. This results in updated North American Datum 1983 (NAD 83) coordinates for stations in the NOAA CORS Network (NCN), kept at epoch 2010.0. This update is called the Multi-Year CORS Solution 3 (MYCS3), and it follows NGS’s MYCS2 effort from 2018.
OPUS-Projects users with active projects are advised that open projects will need to be reprocessed from the beginning in ITRF2020.
If projects are close to completion, users have the option of submitting them to NGS before the transition using the currently published NAD83(2011/MA11/PA11) coordinates transformed from ITRF2014. The deadline for submissions is June 6, 2025 for those wishing to take this route.
Above, I bolded several sentences that will be important to users currently performing projects using OPUS Projects. That is, all projects not submitted by June 6, 2025, will need to be reprocessed from the beginning in ITRF2020.
Users should continue to check NGS’s website for announcements regarding the transition from the alpha site to the beta site. Future newsletters will address the Multi-Year CORS Solution 3 (MYCS3) and will highlight the beta products as they are released.
BAE Systems unveiled a diverse line of M-code GPS receivers at the Joint Navigation Conference in Cincinnati, rounding out an extensive line of products that ensure U.S. warfighters have the most dependable GPS systems available across sea, land and air.
M-code is a military GPS signal designed to improve anti-jamming capabilities and provide enhanced security. BAE Systems’ security-certified Common GPS Modules (CGMs) leverage the robust M-code signal across an all-inclusive GPS receiver line. The portfolio scales from the world’s smallest and lowest-power M-code GPS for size, weight, and power (SWaP)-challenged applications, to highly robust receivers with integrated anti-jam antenna electronics for exceptionally challenging environments.
BAE Systems’ diverse line of M-code receivers are next-generation GPS solutions for airborne, weapon, and ground platforms, including handheld form factors. This includes:
ASR-M
DIGAR-300M
MPE-M
MicroGRAM-M
NavFire-M
NavGuide
NavStrike-M
NavStorm-M
SABR-M
The company anticipates deliveries of the NavGuide handheld to customers will begin this year.
BAE Systems is also set to deliver a future generation of GPS products based on Military GPS User Equipment (MGUE) Increment 2 technology, developed as part of the MGUE Increment 2 Miniature Serial Interface (MSI) program. The technology will improve the performance of military position, navigation, and timing (PNT) equipment and provide resilience against attacks on GPS signals.
BAE Systems has provided selective availability anti-spoofing module products to more than 45 countries and is delivering M-code GPS receivers in multiple form factors and levels of capability to the U.S. armed forces and its allies through foreign military sales.
Honeywell has expanded its navigation portfolio with the HG3900 inertial measurement unit (IMU), a lightweight and low-power tactical-grade device with accuracy and reliability comparable to larger near-navigation-grade IMUs.
Honeywell will showcase the HG3900 IMU, along with the rest of its navigation products, at the Joint Navigation Conference in Cincinnati June 2-5, including a feature session on June 4.
The HG3900 is comprised of all-silicon microelectromechanical system (MEMS) gyroscopes and accelerometers, which enables a significant reduction in size, weight and power from comparable IMUs using traditional technologies. Its advanced sensors significantly boost its performance by offering a 20-time improvement over other Honeywell MEMs.
The HG3900 is designed for backward compatibility. As the highly successful Honeywell HG1900 IMU nears its end of life, the HG3900 will be offered in a nearly identical package to enable an easy transition for existing HG1900 customers.
The HG3900 IMU has successfully completed full environmental testing by the U.S. Army and Navigation Technology Associates (NTA), meeting requirements while under demanding environmental conditions including high vibration and dynamic temperature changes.
“Our HG3900 IMU is an ideal solution for customer applications requiring tactical or near-nav grade performance in a small, lightweight package,” said Matt Picchetti, vice president and general manager, Navigation and Sensors, Honeywell Aerospace Technologies. “Extensive Honeywell and customer testing demonstrates that our new IMU offers superior real-world performance in a smaller package.”
IMUs are widely used on aircraft, ships, spacecraft and other applications where precision positioning and navigation are critical. The importance of these devices has intensified considerably over the past decade with the significant growth in autonomous vehicles and other autonomy use cases. IMUs utilize gyroscopes, accelerometers and electronics to determine where a vehicle is, what direction it is going, at what speed and how far it has travelled.
Advanced MEMS IMUs such as the HG3900 are highly resilient and can provide accurate navigation and orientation data with or without GNSS inputs. They can function independently for extended periods when GNSS signals are jammed, spoofed or unavailable.
The design verification process will continue into 2026 with initial production and deliveries to begin in late 2026 or early 2027. Honeywell is accepting orders for pre-production units for delivery in 2026.
Inertial Labs, a VIAVI Solutions company, has introduced its Visual-Aided Inertial Navigation System (VINS), designed to help aircraft maintain accurate flight paths in environments where GPS/GNSS signals are unreliable.
The launch follows a report from the U.S. Department of Transportation noting a rise in GPS jamming and spoofing incidents across North America and much of Western Europe. These disruptions, which now reach up to 700 cases worldwide each day, impact both commercial and military operations. War zones have seen the highest concentration of interference, with Lithuanian airspace alone recording more than 800 cases in the last three months of 2024. Communications and emergency services, which depend on precise timing and geolocation, are also affected.
VINS is engineered for unmanned aerial vehicles to complete long-range missions in GNSS-challenged environments. The system leverages Maxar Raptor 3D vision-based positioning software, which estimates a vehicle’s absolute 3D position by comparing onboard camera imagery — day or infrared —with Maxar Precision3D satellite-derived maps using Perspective and Point principles.
In GNSS-denied conditions, VINS can maintain a horizontal position within 35 m, a vertical position within 5 m, and velocity within 0.9 m per second of true values. It also holds heading accuracy within 1° and pitch/roll within 0.1°. With GNSS enabled, the system achieves a horizontal position of 1 meter, vertical position under 2 m, velocity accuracy of 0.03 m per second, heading within 0.1 °, and pitch/roll within 0.03°.
The modular system is designed for low-altitude operation and includes processing and sensor modules, a GNSS or CRPA antenna, an air-data computer, and a digital windspeed sensor for use with both fixed-wing and multi-rotor UAVs. Optional features include a commercial off-the-shelf radio for data and absolute positioning in GPS-denied environments, as well as Iridium low-earth orbit (LEO) GNSS and M-Code/SAASM GNSS receivers.
Inertial Labs and VIAVI will demonstrate VINS and the second-generation RSR Transcoder with GPS full constellation simulator at the 2025 Joint Navigation Conference (JNC), held June 2-5 in the Greater Cincinnati area. The products will be on display at the Inertial Labs (booth 430) and VIAVI (booth 406) stands.
VIAVI and its Inertial Labs division will also present three sessions at the conference:
“3D Vision-Based Positioning for Autonomous Aerial Platform Navigation and Human-in-the-Loop Reconnaissance Mission,” presented with Maxar, Monday, June 2 at 1:50 p.m. ET.
“Anti-Jam/Spoof Phased Array Antenna,” Wednesday, June 4 at 10:50 a.m. ET.
“Retrofitting At-Risk GPS Defense Equipment with a Multi-Orbit LEO and GEO Clock System for Resilient PNT Services,” Wednesday, June 4 at 11:30 a.m. ET.
SpaceX successfully launched the GPS III SV-08 satellite into orbit on May 30 from Cape Canaveral Space Force Station, marking a significant milestone for the U.S. Space Force’s rapid-response capabilities. The mission, executed in close coordination with Lockheed Martin and SpaceX, launched the eighth GPS III satellite into the constellation after an accelerated preparation period of just three months, well ahead of the traditional two-year timeline for national security launches.
The GPS III SV-08, named after the pioneering NASA mathematician Ms. Katherine Johnson, is part of the next-generation GPS IIIF satellites designed to enhance accuracy and incorporate advanced anti-jamming features for both military and civilian users. Built by Lockheed Martin, the spacecraft is equipped with M-Code technology, delivering signals that are three times more accurate and eight times more resistant to jamming than previous generations. These improvements are critical as threats to GPS reliability, such as jamming and interference, continue to increase.
In a press statement, Col. Andrew Menschner of the Space Force emphasized the urgency behind the accelerated launch schedule to mitigate increasing GPS jamming and interference: “There are 38 GPS satellites in orbit, 31 of which operate on a daily basis. We have a healthy redundancy in the constellation. But the addition of SV-08 allows the constellation to build resistance against those who would try to interfere with GPS signals.”
This launch marks the second time the Space Force has demonstrated its ability to deploy a GPS satellite on a compressed schedule. The previous rapid-response mission, dubbed Rapid Response Trailblazer, saw the seventh GPS III satellite launched in December 2024 after five months of planning. For SV-08, the team further reduced the schedule by 40%, reflecting lessons learned and increased efficiency.
Looking ahead, the final two GPS III satellites will be launched on United Launch Alliance’s Vulcan rocket, paving the way for the next-generation GPS IIIF satellites. According to Lockheed Martin, these spacecraft will introduce even greater anti-jamming capabilities, fully digital navigation payloads and advanced features such as regional military protection and improved search-and-rescue support, further enhancing the robustness and utility of the GPS constellation.
Anyone who has had to carry cumbersome legacy surveying instruments over rough terrain can probably confess to daydreaming about having something like Mr. Spock’s “Tricorder,” a small device that captures everything about your surroundings. Such sci-fi devices anticipated the “reality capture” wave of the present day.
Multi-sensor stacks have become the norm and are essential for many geospatial applications. Consider vehicular autonomy. For safety-of-life considerations, no single positioning technique could suffice. Each sensor type has strengths and weaknesses. Lidar has good behaviors under certain conditions: radar, GNSS and inertial measurement unit. That is why a typical autonomy stack will include one or more sensor types. More data of different types is better, especially if it can share a common, highly precise spatial reference. Surveying and mapping are benefiting laterally from the research and development for autonomous solutions. In some ways, autonomy solutions have benefited from the long-standing legacy of research and development in geomatics applications.
Platforms, Positioning and Progress
As surveying and mapping practitioners, we are bombarded with news and ads for a seemingly endless parade of the latest reality capture devices: handheld SLAM scanners, drone payloads, mobile mapping systems, backpacks and more. Many are using OEM sensors from a relatively small subset of manufacturers; this trend is similar to the wave of third-party GNSS rovers a decade ago.
While the individual sensors deliver astounding data, integration into field capture devices often shortchanges one crucial element: positioning. There is a tendency to keep cost, size, and power consumption low by including positioning components (e.g., GNSS and IMU) originally developed for mass-market applications like vehicle autonomy. Not every handheld SLAM system can afford to add survey-grade capabilities, like that delivered by dedicated surveying rovers costing tens of thousands of dollars, so users need to have realistic expectations.
A surveyor might wince when they hear a marketing claim from yet another SLAM device manufacturer claiming, “centimeter precision, anywhere!” Even with top-tier survey rovers, skill and experience temper such expectations. But what if the platform of a highly capable, survey-grade rover, packed multiple data capture sensors? This idea is not new, and the evolution of rover-based solutions in many ways, enabled the development of the current wave of reality capture systems.
Positional Integrity Through Motion
It is a prospect that might seem counter-intuitive: deriving a precise position while moving the instrument. Providing tilt compensation for a GNSS survey rover (on a pole/rod) had long been desired. The impetus was to improve efficiency, namely by removing the time spent leveling the rod for each observation. Freeing the user from the tyranny of the bubble was one goal, but it was also the first crucial step in being able to enable further sensor integrations.
Integrity through motion is one of the foundational elements of GPS/GNSS: the trajectories of the navigation satellites can be predicted with high confidence. For example, frequently updated ultra-rapid orbit products utilized in many GNSS solutions rival the “precise” orbit products we used to wait days for. Similar principles apply to modern tilt compensation solutions. The movement of a rover head provides a highly predictable reference trajectory for the orientation of the tilt sensors.
Electronic bubbles and tilt compensation have been around for many years. For example, compensators are standard in many instruments, such as total stations, and tightly coupled GNSS+IMUs in mobile systems for road, sea, and airborne mapping. Consider the SPAN system from Hexagon | NovAtel. Such systems compute centimeter-grade positions for moving cameras, lidar units, and other sensors, while taking into account heading, speed, pitch, yaw, roll, and in the case of marine systems, heave — at highway speeds, plowing through rough seas, or zipping across the sky. The challenge, though, was miniaturization. Could such capabilities be developed to fit into a standard survey rover?
Tilt compensation in rovers began to appear over a decade ago. For example, in some JAVAD rovers of the day; other manufacturers were soon to follow. These were at the time, unfortunately, magnetic-oriented systems. While a noteworthy achievement, the inconsistencies inherent to magnetic reference and cumbersome calibration routines soured a lot of users to the idea of tilt compensation.
The Leica GS18T marked the beginning of the multi-sensor stack trend for GNSS rovers, introducing no-calibration tilt compensation in 2017. This was soon followed by the GS18I, adding a camera for offset points, stakeout, and point cloud creation. Since then, such features are common across the industry. (Photo: Gavin Schrock)
This changed with the announcement by Leica Geosystems at the October 2017 INTERGEO international exhibition and conference in Berlin of the no-calibration tilt-compensated Leica GS18 T GNSS rover. This was one of the first “stacked rovers,” spawning a chain reaction of similar feature integration across the industry.
“The main thing we wanted to do was to make measurements faster for the user,” said Bernhard Richter, vice president of product management geomatics at Leica Geosystems, when I interviewed him at the time of the GS18 T launch. The process was part of a 10-year initiative to improve field efficiency, but it was not the sole goal. Dynamic precise positioning was the first step to enabling the integration of additional features.
After a year or so of end users getting over the skepticism of tilt compensation, you will now find it as a standard feature on nearly all new GNSS rovers. Of course, users need to verify and build confidence in new solutions. Surveyors of a certain age might remember when nervous party chiefs would require taping/chaining of distances to verify if those “new lasers” were working right.
Adding Sensors
GNSS in sky-view-challenged environments was the impetus for the first multi-sensor integrations. Namely, how to get the shot under the adjacent canopy, or roof overhang. While manufacturers and integrators had been offering various ranging lasers as peripherals GNSS rovers since the late 1990s, the Achilles heel was the orientation; limited to magnetic references. Despite this handicap, such offset point solutions were popular for certain applications (e.g., asset inventory, trail mapping).
Once dynamic precise positioning was achievable in a rover head, it could become a platform for additional data capture sensors. Cameras were the logical first step. A camera included on some JAVAD rovers was leveraged by some users for photogrammetric computation of offset points. Leica Geosystems soon followed up its GS18 T, with the GS18 I, which added camera-based offset point capabilities. Rather than some early photogrammetric offset point solutions where you took individual static photos, with the GS18 I, you capture a series of precisely spatially registered images while in motion. In the companion Leica Captivate software, you can quickly identify the offset points. The same images can be processed in the software as a 3D point cloud, which many users do.
Again, we started to see camera-based offset point (and stakeout) solutions in nearly every brand of GNSS rover. What’s next? We’re starting to see lidar added to some rovers. But at what point should a field user reach for a dedicated reality capture device, rather than trying to do everything with an enhanced GNSS rover? There’s a lot to consider, so we asked some integrators for insights.
Eric Gakstatter, principal and owner of Discovery Management Group, has been promoting multi-sensor at conferences for decades. His firm also has developed and consulted on such sensors in conjunction with various manufacturers. Gakstatter highlighted some successful sensor integrations.
“There’s a difference between, say, those lidar SLAM devices and rovers,” he said. “With one, you are looking for a point cloud, but with the other, you are more interested in discrete points of interest; you’re very deliberate in measuring specific features.” Gakstatter had recently given me an overview of the Eos Positioning Systems Skadi GNSS rover, a next-generation receiver from the makers of the Arrow GNSS receiver systems. The Skadi features a built-in antenna and full tilt compensation, but also can be paired with a companion smart handle that offers some interesting multi-sensor capabilities. First, there is a “virtual pole” feature that wirelessly measures the distance straight down to the ground, eliminating the pole for certain applications. Another feature is a ranging sensor with a visible laser pointer for offset points and stakeout. “You can pull the trigger and trace along a curb line, collecting points in a continuous mode,” said Gakstatter. “It’s literally point and shoot simplicity.”
The Eos Positioning Systems Skadi rover fits on a pole, or this handle with automated height-above-ground and offset features measurement sensors. (Photo: Eric Gakstatter)
His firm has also developed, in partnership with another manufacturer, an angle encoding peripheral that mounts on the pole. When used in conjunction with a rangefinder-style laser, the GNSS rover can perform traverses in much the same manner as a surveyor’s total station. In a field demonstration for a utility services company, the crew did such a traverse along a roadway, then under canopy, in the shadow of tall buildings, inside a covered parking garage, and then closing back on the beginning outdoor points. This process would have taken much longer with conventional instruments.
While a strong advocate for multi-sensor integration, Gakstatter points out some of the challenges. “It just takes so long to get the right technology, the right packaging, the right power consumption, and then the manufacturers might need years to incorporate it,” said Gakstatter. “You can talk about these future technologies, but it just takes so long. Think about it, why haven’t the iPhone or the iPads become more rugged? Why can’t they make a replaceable battery? You know, all kinds of technology could be done in consumer devices, even multi-frequency GNSS, but they don’t do it. It’s driven by power consumption, real estate inside, size and cost.”
Adding peripherals is another approach for multi-sensor rovers. This system enables sky-view challenge data collection, as in this location between two buildings, with an angle encoder (middle of the pole) and offset rangefinder (under the Eos Skadi rover). With this combination, users can perform the equivalent of closed traverse loops. (Photo: Eric Gakstatter)
“I think you’ll find that some folks who just are going to go after the low-end sort of basic RTK receiver and some simple integration,” said Gakstatter. “But, you’ll always have the manufacturers that are sinking a lot of time and money into research and development, the pioneering stuff. But it is very expensive and for a relatively small market.” When new solutions are developed and integrated by those willing to invest in research and development, users gripe about high prices for the gear, but the payoff is a major increase in productivity and safety. Sure, such features might show up in lower-price-range rovers, but with varying degrees of performance.
Rover Lidar
Lidar can be quite powerful for creating 3D point clouds and models. However, doing a formal scanning campaign with a large-format laser scanner is not always justified. Even if a site is scanned, surveyors might still need to shoot key features with a total station and/or GNSS rover. This practical reality is why limited scanning capabilities (and imaging) were integrated into some total stations. For example, Trimble SX12 total station and the Leica Nova MS60 Multistations. As such instruments provide, by default, highly precise spatial references, any of the selective scans are automatically registered. Users find this aspect highly attractive, capturing rich 3D point cloud data, and images, without the need for extra registration steps.
It was inevitable that GNSS rover manufacturers eventually would seek to add lidar scanners. In what might be one of the first, if not the first such integration (in broadly distributed commercial rover), CHC Navigation (CHCNAV) has its RS10 rover. It is a fully functioning high-performance GNSS rover but with a puck-style scanning head (16 channels or 32 channels for 320K or 640K pulses per second) mounted vertically, offset under the antenna. RTK and PPK workflows are supported.
It can operate as a rover or as a SLAM scanner. It should be noted that the scanner head is of the same quality as similar OEM heads on many SLAM handhelds, small mobile mapping systems, and even drone payloads.
According to Logan Zhou, mobile mapping business director at CHCNAV, when the RS10 was released in 2024, it brought a substantial boost to its mobile 3D sales. I asked what the fundamental differences were between this enhanced rover and a conventional SLAM mapping instrument.
“Compared to a traditional SLAM solution, we have integrated a high-performance receiver and antenna,” said Zhou. “So, the users can acquire the results with geographic coordinates directly.” He added that there are three cameras integrated into the RS10, for image capture and point cloud colorization. There are elements of visual and lidar position stabilization, that are also leveraged in what they call SFIX, to extend positioning capabilities into GNSS challenged areas.
Matt Sibole, PLS, owner of iGage Mid-Atlantic, part of the popular iGage surveying equipment sales and support network, has several RS10s in his rental inventory. He finds the unit very capable as a reality capture system. Sibole also related that his customers are also very pleased with the CHC units that have camera-based offset and stakeout capabilities, like the i89 and i93 (that have forward and downward tilted cameras for stakeout). The i89 and i93 point cloud capabilities utilizing photogrammetry are also quite intriguing to many of his customers.
One consideration of adding a high-precision SLAM scanner to a rover is weight. When using one for standard rover point capture for extended periods, the added weight can become a burden. Sibole prefers a different topography survey workflow. “I’ll go through with my CHC i89 rover, and pick specific points I need, as a check,” said Sibole. “I’ll shoot center and rims of manholes, shoot some property corners, etc. Then, I put that away and grab the RS10. With a connection source from my base, and I set it up for NTRIP, I can just walk around the site and collect the lidar.”
We discussed the growing trend for reality capture systems to have multiple deployment configuration options. You will see some compact systems that can be handheld, mounted on chest or backpack harnesses, attached to vehicles, and even carried as drone payloads. The one element that does, unfortunately, sometimes gets shortchanged is the GNSS component. As I alluded to earlier, there are low-cost GNSS boards that might be suitable for coarse mapping applications, but if you are looking for engineering design or construction quality models, quality makes a big difference.
Cameras Abound
Cameras are relatively small, light and low-cost. They have been a logical integration for at least some models of nearly all GNSS rover brands. Nearly a decade ago at an INTERGEO exhibition, I spoke with Winston Wen, CEO of the then relatively new brand of Tersus GNSS. Wen predicted a great future for multi-sensor GNSS rovers, noting that no-calibration tilt would be the crucial first step, which Tersus would integrate into their line of rovers.
A GNSS+IMU+Camera integration: the Tersus Trek, here shown being used on a survey for a school expansion project. (Photo: Dustin Harr, Desert Creative group)
Next, he wanted to develop enhanced rovers for users who could benefit from not having to pack a bunch of different instruments into the field, especially in remote areas, like for his customers in the Australian outback. Terus now has Trek, essentially a version of their flagship high-performance Oscar rover, but with an integrated camera.
“I think photogrammetry could overtake lidar, for many applications, as the sensor fusion gets better, the algorithms get better, and the actual physical hardware gets better,” said Jesse Huff, surveyor, geospatial thought leader, and general manager of Tersus in North America. “Even in the literary world, you know, a picture is worth a thousand words. There’s a lot more information to be gleaned from the images and the stuff that we’re doing with point clouds. The feature recognition revolution is just getting started.
“The point cloud that we’re getting out, I won’t say it’s as clean as some lidar data,” said Huff. “There’s a little bit of noise in that, but it rivals lidar data for most of what folks are doing, save for structural mechanical work.” The camera-based offset point and stakeout workflows of different manufacturers vary. Tersus offers the users three approaches. One is to initiate the automated image capture sequence by picking a target object in the controller, then it will proceed to look for the same point in subsequent images, to perform the triangulation.
The Tersus Trek enables two types of camera-based offset point measurement. The images also can be processed into point clouds for feature modeling and measurement, as shown in this example from a survey for a school expansion project. (Photo: Dustin Harr, Desert Creative Group)
Another is to take the image sequence and pick points in two or more images in the controller. Huff joked that the old-school surveyor in him prefers the latter option, but notes that a feature recognition algorithms improve, the process in such systems will become even more automated. One more option is to create a point cloud from the images and then select points from that.
One characteristic of legacy close-range photogrammetry, that is the source of lingering doubts about its utility, is the cumbersome processing workflows (of the past). Huff pointed out that the creation of the point clouds from the Trek is performed on the data controller, like their TC40. The same Tersus field software can run on an Android tablet or phone.
“I’ve done point cloud generation with Tersus Nuwa field software using my phone,” said Huff.” I’ve got a Samsung Z Fold5; it’s got a better processor, a quad-core processor, than the first computer that I was using for point cloud registration and processing.
That brings up a good point, noted Huff: “When you talk about sensor stacks, it’s not just sensors, it’s technology stacks. It’s not just taking advantage of the tech that’s in the receiver, it’s also taking advantage of the tech that has evolved in terms of mobile computing devices, artificial intelligence (AI), the cloud and more.”
GNSS Quality
For many indoor, GNSS-denied environments, there are reality capture systems that can produce, through visual and SLAM stabilization, highly precise 3D point clouds and downstream models. A good example is the BLK family of reality capture devices from Leica Geosystems. The Leica BLK2GO is a handheld SLAM device that scans up to 420,000 points per second. It employs a tight integration of an internal IMU, a unique camera-based progressive spatial reference technique, and SLAM stabilization (together dubbed “GrandSLAM”).
For indoor applications, the crucial reference is relative to the structure. Outdoors, a SLAM scanner would typically need terrestrial reference points for absolute spatial registration, and/or leverage GNSS. Here is where the quality of the GNSS could mean the difference between having to set many control points with other instruments (substantially adding to project costs), or an appropriate minimum.
For their handheld, camera-based 3D mapping system, Looq AI opted for a high-precision GNSS board from Septentrio to integrate with an IMU for their automated PPK and AI processed workflow. (Photo: Gavin Schrock)
This paradigm was of prime consideration for Looq AI, when they were developing their flagship handheld, camera-based reality capture system. The system is a harbinger of another trend (that would need a separate article), about how close-range photogrammetry is coming into its own, and with recent advancements and techniques, is becoming a serious challenge to lidar, and especially SLAM lidar. I compared point clouds for a small site, between that of the Looq handheld, and a large format terrestrial laser scanner — and could not see any difference. How does it do this? And what role did precise GNSS play in this?
The script has been somewhat flipped. In the case of one recent development, instead of adding cameras to a rover, high-quality GNSS+IMU was added to high-quality and rigorously calibrated camera-based reality capture handheld.
“From a technological foundation, we knew that for triangulating thousands of image features, which are represented by points in the real world, multiple optics were required,” said Dominique Meyer, co-founder and CEO of Looq AI. “We create a triangulation algorithm for the camera system that would provide robustness that is much greater than many of the photogrammetric single-camera solutions out there, and at the same time, exceed the point cloud density of many lidar point clouds. A precise spatial and temporal component is crucial to apply to the observations.
“If you look at computer vision and GNSS independently as two independent sensor stacks, GNSS is robust in very specific environments,” Meyer added. “You have the number of satellite observations, quality of observations, precise time, and a set of corrections. Only when those are all good do you have great GNSS localization capability. The second you lose any of that, because you’re in a forest or under a roof or a bridge, you don’t necessarily know how robust your GNSS localization is.”
This is why Looq decided to make post-processed kinematic (PPK) an integral part of their workflow; PPK is performed automatically for the user, in the cloud, before point cloud processing. “Fundamentally, we knew that post-processing would apply better corrections, because it enables a backward pass in the corrections, fundamentally always exceeding or equating the quality from an RTK solution,” said Meyer. “Because our computer vision algorithms always run after the capture, we knew we could afford to run a PPK service, which would also allow us after the fact to decide which correction services to use. If you have a local base, you can use that. If you don’t have a local base, you can use a public correction service. And if you don’t have that, you can use a PPP solution.”
Another key component was the choice of the GNSS and IMU components of the Looq handheld. “We considered many hardware options. We had a layout of pretty much every GNSS receiver at the time out there. What we cared about was multiple bands, especially the newer bands like L5,” said Meyer. As noted, there are GNSS boards for many different applications, and while some of the lower-cost solutions are “multi-constellation,” they may only support a limited number of signals per constellation. Being able to work in limited sky and high multipath environments was important; low-cost boards can struggle with this.
Looq chose components from Septentrio. “The other part is spoofing and interference,” said Meyer. “Not that it is super common, Septentrio has put a lot of effort into filtering to make sure that you don’t get third-party interference across the RF spectrum that would affect the quality of the GNSS. Tests we had completed demonstrated that with the multiple bands and with the RF reliability, it was the best, which would allow us to produce the best market product.”
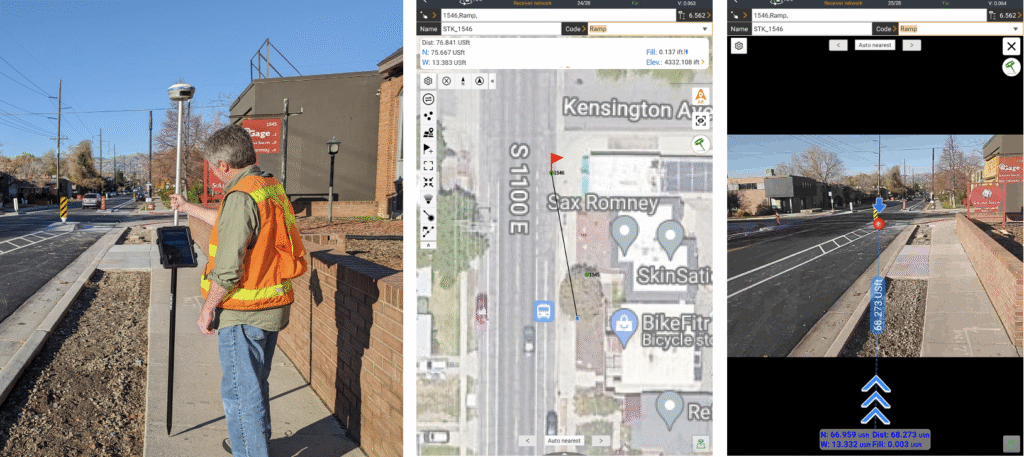
Visual offset point and stakeout with the CHC i89 rover (left), and in the Landstar field software (center and right). (Photo: J. ZoBell, iGage)
Duality
I circled back with Bernhard Richter of Leica Geosystems, who shepherded the development of that pioneering stacked rover, the GS18 T. We discussed the question of GNSS rovers as a multi-sensor platform. Several key themes emerged from the conversation.
Surveying is, in many ways, reality capture, but it is handled in a different, more selective and focused manner. Features observed must often meet very tight precision and integrity expectations: property marks, control for engineering and construction, monitoring, and more. Reality capture is about mass data capture. While there are advantages for certain applications in the proximal richness of mass data capture, there always may be the need for discrete points.
“When we designed the GS18 T, we recognized a challenge in bridging the gap between single-point measurement and reality capture,” said Richter. “Our goal was to improve the efficiency of discrete point collection while maintaining survey level quality.” With tilt achieved, the later addition of camera-based offset point capabilities to the GS18 I, was simply to improve efficiency even further.
“One of the main concepts behind the GS18 I is that everything you capture through photogrammetry is immediately aligned with the same reference frame or coordinate system as your normal GNSS points,” said Richter. “This additional feature does not put any extra burden on your hardware, and if you work in the conventional way, it performs just as well as any other method.” While you can produce point clouds from the images, that was not the primary goal, but a nice feature for certain situations. This raised another consideration: is capturing potential excess data a wise move?
“You can use mobile scanners, or sensors on your rovers, and generate point clouds of everything,” said Richter. “Capturing massive amounts of data is easy from a hardware perspective. But then you have to process and use all of this data. Right now, the software side of the industry is playing catch up. There just isn’t enough automation yet, though AI will certainly help with that moving forward.” It is a common complaint in the geospatial sector that there are substantial backlogs in the office processing of reality capture data.
“Yes, you can scan everything and then have someone extract the needed data from the point cloud,” said Richter. “But depending on the application, your client might be better off with a more conventional survey of discrete points chosen in the field. That said, for capturing large areas or long road corridors, a terrestrial scanner, mobile mapping system, or drone may be the most efficient option.”
Those applications aside, I hear misgivings among surveyors about the “scan everything” approach. They often can meet the needs of clients with conventional topo, mapping right there in the field, and that reduces the office component dramatically compared to a scanning workflow. So, is there a compelling need (for now) to add mass data capture sensors to survey rovers? Perhaps not. As prices for reality capture devices, SLAM scanners, drones, etc., drop over time, they become part of a firm’s standard kit, along with a rover and total station.
“We’ve always been keenly aware of the technology hype cycle,” said Richter. “There’s the initial excitement, then a trough of disillusionment, but if a solution truly improves productivity, adoption comes later. We could have added magnetic oriented tilt compensation long ago, but recognized that we could not rely on the Earth’s inconsistent magnetic field. It could have resulted in a substandard product. It was best to invest our efforts into the type of tilt used in the GS18 T.” While I did not press for any details about what might be next for their research and development, I sensed that the subject of additional sensors for rovers would keep the same principal in mind.
“At the end of the day, you need to solve specific customer problems,” said Richter. “There’s a lot that can be done, but not everything adds efficiency in the way people might expect. Often, the downstream automation isn’t there yet to handle a flood of additional data. Integrating additional sensors can require tradeoffs, and in many cases, there may already be more efficient options available. Not every application benefits from a mass data capture approach.”
What If?
Manufacturers can be averse to revealing what they’re working on next but watching lateral developments in the world of geospatial sensors, certain moves might seem inevitable. We’ve seen how disruptive the addition of various types of Time-of-Flight (ToF) sensors, to consumer tablets and phones, has been. For certain (very short-range) applications, the point cloud quality from some phone sensors rivals, or even bests that of some lidar systems. There are also examples of highly refined ToF sensor implementations in reality capture devices, such as the Leica BLK2GO PULSE.
Approaches to adding multiple sensors, be that to GNSS rovers, or dedicated reality capture devices, may someday merge as newer, smaller, and more capable sensors are added to the former, and improved positioning capabilities are added to the latter. The Leica BLK2GO PULSE is an example of where solid-state time-of-flight sensors can be leveraged, rather than traditional laser scanning profilers (that have moving parts). (Photo: Gavin Schrock)
There has even been a wave of devices that allow you to attach your ToF-enabled phone to the handle, which also features an RTK-capable GNSS antenna and receiver. These have become popular, for instance, capturing utilities in an open trench before they are buried. One concern is that there is a tendency to skimp on the GNSS hardware. You only get to measure those pipes once. Why not get the best-quality data?
So, why not put the ToF sensors on a high-performance rover? Someone is bound to do it; it is just a matter of time. The same applies to other solid-state lidars. There are some types of what folks call solid-state lidar that have moving parts on the MEMS. But now we are seeing true solid-state lidar (no moving parts), for instance, that are integrated into mobile mapping and road inspection systems by XenomatiX. There are still some miniaturization and power budget issues ahead, but we will likely see solid-state lidar on rovers at some point, which would overcome the weight handicap of SLAM lidar heads attached to rovers.
Then we can look ahead to the near-sci-fi realm of quantum sensors. Read more on this subject at: gogeomatics.ca/quantum-surveying. Quantum technologies could someday upend imaging and lidar approaches, and other sensor types. For example, quantum radar could employ more bands on a single, smaller antenna than the large separate antennas required of conventional radars. Radar has particular advantages for foliage penetration. Imagine scanning a roadside with solid-state lidar, and then radar enhances what you can see under and behind the vegetation.
Relatively small quantum antennas have been demonstrated to detect the entire RF spectrum; these could be super-sensitive to specific bands and help mitigate multipath, spoofing and jamming hazards. On the subject of commonly mentioned vulnerabilities to GNSS, quantum magnetometry is showing promise for not only an alternate navigation approach but could act as a “canary in a coal mine” for GNSS applications, detecting offsets that would indicate spoofing.
Within the last month, a functioning and commercially offered quantum navigation device was announced, and it is nearly pocket-sized. Sorry for the geek detour, but there could be fascinating things ahead.
The compact ComNav Technology Venus rover has tilt compensation and a ranging/tracking laser that can be used to do measure-ups when on a pole or offset point/stakeout as shown in this example of measuring a drainage hole invert. (Photo: Gavin Schrock)
Some folks dismiss the prospect of a multi-sensor GNSS rover as being like a multi-tool, like a Leatherman or Swiss-style military knife. Super handy when you need it, but the individual tools might not ever match the utility of a dedicated tool. I’m among those who, to some degree, disagree with that analogy. Unless it is a case of some slapped together systems (with the lowest cost components possible), for many systems, the added-on features can boost productivity and deliver precise data (with careful and appropriate practices).
Sometimes, the zeal to stack rovers is not always successful. There was the case of a manufacturer embarking on an earnest initiative to build a sensor-rich add-on for a GNSS rover, which some envisioned as a way to match the capabilities of a total station. However, it appears that the initiative has been suspended.
There’s a lot for users to consider: do they invest in multiple dedicated instruments, and can they afford the best of each? But on the other hand, is the stacking of multiple sensors on a GNSS rover really warranted or even practical? Can combo systems effectively meet most of your needs? Do you consider fit-for-purpose solutions? The good news is that the progression of innovation in hardware and software is continuous. There are a lot of intriguing options already out there, with more to come.