DroneDeploy, an aerial and ground reality capture and robotics platform, has entered a strategic partnership with the GEODNET Foundation to enhance enterprise UAV capabilities by providing access to high-precision positioning data.
The partnership will grant DroneDeploy customers access to GEODNET‘s extensive network of 10,000 registered stations. This access will significantly improve the accuracy of UAV surveys, underground utility mapping and documentation for various industries, including construction, mining, energy, and utilities, according to DroneDeploy. The agreement also includes provisions for DroneDeploy to work with its users to establish additional GEODNET stations in areas currently lacking coverage, further expanding the network’s reach.
“Today’s affordable enterprise drones support sophisticated RTK and PPP survey-grade workflows; however, affordable access to RTK base-station data remains a barrier to efficient usage of these powerful capabilities,” said James Pipe, chief product officer at DroneDeploy. “DroneDeploy is pleased to partner with GEODNET and to offer integrated access to GEODNET’s rapidly growing RTK network.”
In partnership with the European Space Agency (ESA), EnSilica, a maker of mixed-signal application-specific integrated circuits, will design and develop a key silicon component to enable resilient multi-band global navigation satellite system (GNSS) capabilities. These are vital to ensuring the world’s critical infrastructure and services remain robust and secure in the face of evolving global threats, according to the company.
The ESA NAVISP Element 2 program helps to increase the competitiveness of participating European states in the global market for satellite navigation and enables these countries to be positioned to capitalize on emerging market opportunities across positioning, navigation and timing (PNT) technologies and services.
“As we and our infrastructure become ever more dependent on PNT services in everyday life, it is important to have highly integrated, resilient and precise technology sourced in Europe and the UK,” said Paul Morris, vice president of RF and communications business unit at EnSilica. “This collaboration will allow us to accelerate such technology, starting with a next-generation radio design enabling our partners to focus on integrating their custom algorithms.”
EnSilica has a growing satellite communications market footprint and is working with support from ESA and the UK Space Agency (UKSA), with the latter organization awarding the company £10.38 million ($12.8 million) in February 2025 for a development project under its Connectivity in Low-Earth Orbit program. Part of the company’s expertise is in architecting and implementing systems-on-chip with high-performance RF, including mmWave, and complex baseband processing.
Ian Lankshear, CEO of EnSilica, added, “I am extremely proud of our team to have been secured this agreement under the ESA NAVISP Element 2. This project will enable us to further enhance GNSS technology and continue to develop commercial solutions that are critical for resilient and reliable satellite navigation. We are grateful for the ongoing support from ESA and the UKSA, and we continue to focus on PNT and the broader satellite communications market as a key growth driver of our business.”
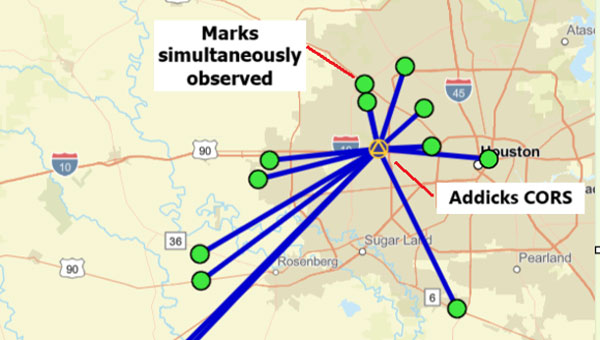
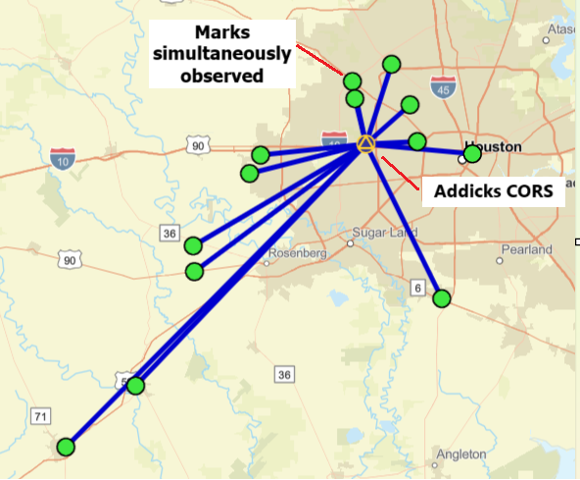
A “GNSS radial survey” is a surveying technique where a central control mark is established within an area, and vectors are measured from the central control mark to various other marks of interest surrounding the central control mark, essentially creating a “spoke-like” network design.
Plot of OPUS Projects network diagram. Hub is Addicks CORS, all marks are simultaneously observed during the session. (Photo: Dave Zilkoski)
Why not use a GNSS radial survey when establishing geodetic control networks?
Basically, you cannot directly calculate a “relative accuracy” between two marks if no observations are taken between them. That said, a direct measurement such as a GNSS vector allows error propagation between two marks. Therefore, using the “spoke-like” concept, you know the relative accuracy between the central control mark and a single mark at the end of a single spoke. Still, you don’t know the relative accuracy between marks on the different spokes.
Anyone who has used OPUS Projects or seen presentations on OPUS would think, based on the OPUS Project’s HUB processing strategy, that OPUS Projects was performing a radial survey.
When using OPUS Projects, NGS recommends that users select one CORS as a HUB while processing GNSS session data. In the example here, the Addicks CORS (ADKS) was used as the HUB in data processing. So, why is this not considered a radial survey? It may look like a GNSS radial survey but there’s a lot that goes on behind the scenes.
The bottom line is that OPUS Projects is denoted as a simultaneous (session) processor. This means the vector solution is computed from simultaneous processing of all independent vectors with mathematical correlations between all simultaneously observed vectors. OPUS Projects processing includes all independent vectors along with mathematical correlations to provide the relative connection to marks that are simultaneously observed. In the example above, when processed by OPUS Projects, all the marks occupied (indicated by the lines connecting to the Addicks CORS HUB) will have correlations computed between each other. These correlations are included in the data that is used in the least squares adjustments that are performed during the OPUS Projects workflow (NGS uses a file denoted as the gfile to document the correlations.)
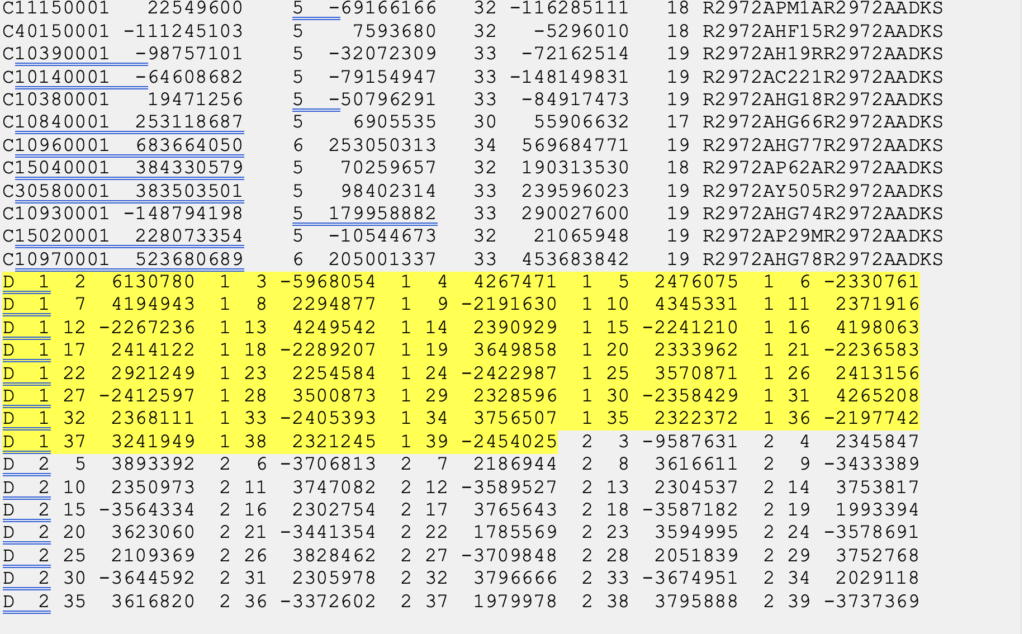
The image below provides a sample of mathematical correlations between marks simultaneously observed during the session. The gfile can be a large file when the survey includes a lot of simultaneously observed marks because there will be correlations between all marks. There were 13 marks simultaneously observed during the sample session, so the “spoke-like” diagram includes imaginary lines between every mark because of the mathematical correlations between these marks.
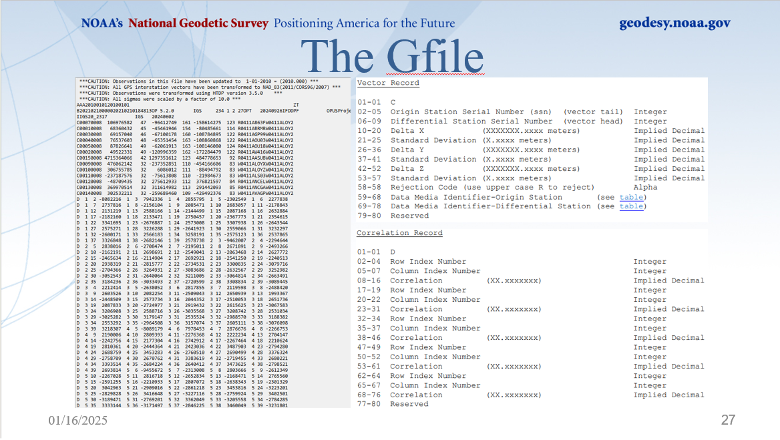
Excerpt from an output from simultaneous (session) processing. (Gfile contains baseline information with mathematical correlations.)
Dan’s presentation included a slide that described the file’s format. The file provides information on the vectors (delta X, delta Y, delta Z and their standard deviations) between the HUB and the individual marks, plus the mathematical correlations between all marks simultaneously observed during the session. I have highlighted a vector’s components and standard deviations and a set of mathematical correlations.
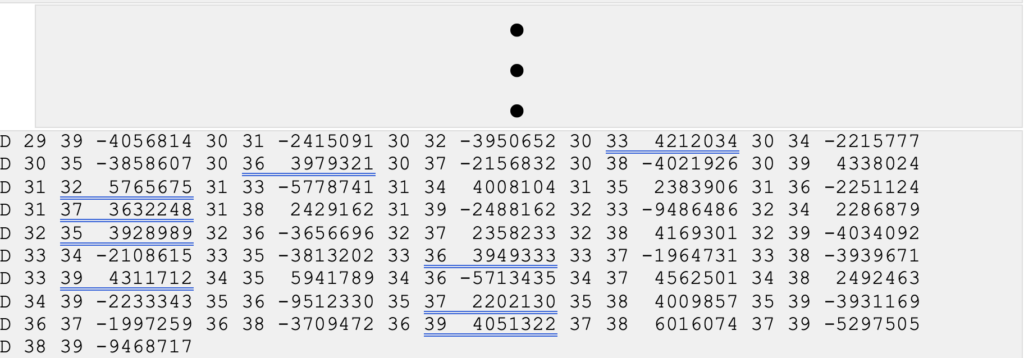
The image below, from Dan’s presentations, describes the format of NGS’s gfile.
Photo: NGS
Some software programs perform what is called sequential (baseline) processing, which involves processing one vector at a time and ignoring the mathematical correlation between baselines observed in the same session. So, what does this mean, and why is it important?
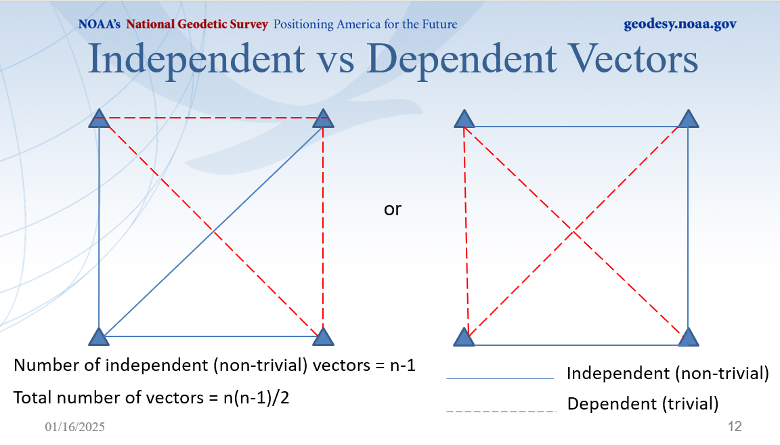
A couple of definitions are necessary to understand the concept. Independent baselines are baselines where no other baseline is a linear combination of another baseline. Linearly dependent (trivial) baselines are baselines that are linear combinations of another baseline. Basically, once you have used a particular set of data to compute a vector, you can’t use the same data to compute a different vector.
Dan did a nice job during his webinar explaining what baselines are considered trivial and what baselines are non-trivial. This is very important because if your software is a sequential (baseline) processor, you must ensure that trivial vectors are not included with the non-trivial vectors. As Dan highlights in his webinar, dependent vectors are not additional observations. But they do offer useful information if treated properly.
Photo: NGS
There was a 1992 study performed by Michael Craymer and Norm Beck, “Session Versus Baseline GPS Processing,” that explained the differences between sequential baseline processing and simultaneous (session) processing, and what the user needed to do to use sequential baseline processing. Basically, when all the trivial vectors are added to the adjustment, they are treated like additional independent observations, resulting in an inflating degree of freedom and overly optimistic error estimates. If all possible vectors are processed, then resulting coordinates may essentially be the same as in simultaneous (session) processing, but statistics will be overly optimistic and misleading. The 1992 paper does state that the two different processing techniques can produce the same results.
“It is shown that using all possible baseline solutions (with the covariance matrix scaled by n/2, where n is the number of simultaneously observing receivers) is mathematically equivalent to session processing with all correlations only under certain conditions. This equivalence is verified empirically using simulated and real data. However, the conditions under which this equivalence holds are difficult to achieve in practice.”
Users who process data using a sequential processor should read the 1992 study by Craymer and Beck to understand the conditions under which the two processes generate the same results.
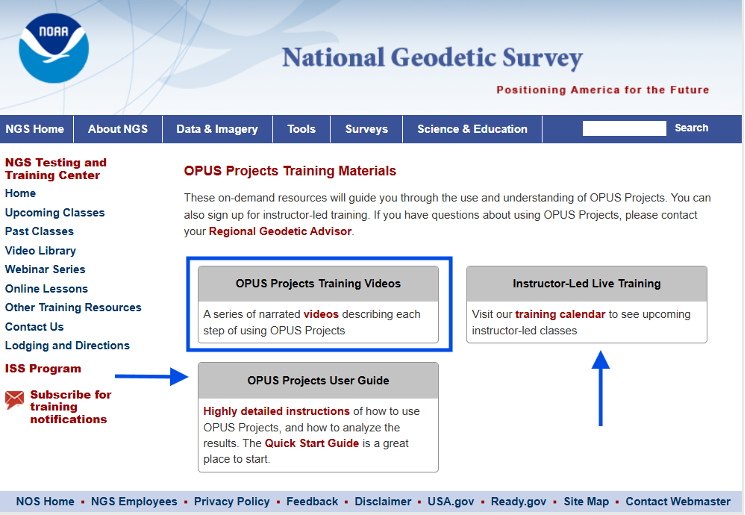
I would encourage all individuals that process GNSS data, regardless of which software you use, to download the NGS OPUS User Forum webinar. NGS also has a website that provides training material on the use of OPUS Projects. The more you know about the software you use, the better you will be prepared to address issues associated with your survey results.
TCarta has introduced a new line of Satellite Reconnaissance Charts designed to complement official marine navigation maps in shallow waters. These digital maps, derived from recently acquired satellite imagery, adhere to International Hydrographic Organization S-57 and S-100 data model standards, mirroring the appearance and symbology of official navigation aids.
The TCarta Charts provide up-to-date information on seafloor depths, sandbars, reefs, shoals and other submerged hazards, as well as floating dangers in near-shore environments. The new products are particularly valuable for shallow water navigation, where official nautical map products, primarily designed for commercial shipping lanes, may lack detail.
Available in off-the-shelf 1:20,000 scale and custom 1:4,000 scale, the TCarta Satellite Reconnaissance Charts are delivered in file formats compatible with popular marine navigation software and common GIS platforms. This compatibility ensures easy integration into existing navigation systems.
These charts are designed to serve as a supplementary tool, providing mariners with additional information to navigate potentially hazardous near-shore environments more safely.
[SPONSORED CONTENT] Ensure accurate navigation by avoiding errors in simulated GNSS and INS output. Discover how CAST Navigation’s advanced configurability and synchronization deliver reliable, high-fidelity simulations for precise performance in diverse scenarios.
STMicroelectronics has unveiled the Teseo VI family of GNSS receivers. The new receivers integrate multi-constellation and quad-band signal processing on a single chip, achieving centimeter-level accuracy for various applications.
The Teseo VI family includes the STA8600A and STA8610A models, featuring dual independent Arm Cortex-M7 processing cores. These receivers are designed for automotive applications such as advanced driver assistance systems (ADAS) and autonomous driving, as well as industrial uses including asset tracking, mobile robots and precision agriculture.
The receivers integrate all necessary system elements for centimeter accuracy into one die, supporting simultaneous multi-constellation and quad-band operations. This seeks to simplify product development and enhance reliability in challenging conditions, such as urban canyons.
The Teseo VI+ variant can host enhanced positioning engines developed by third-party companies, providing real-time kinematics for centimeter position accuracy. The Teseo APP2 STA9200MA operates dual cores in lockstep, offering hardware redundancy for applications requiring ISO 26262 ASIL-B functional safety compliance12.
STMicroelectronics’ RF architecture and GNSS baseband design provide quad-band GNSS support (L1, L2, L5 and E6) with the ability to acquire and track only L5, improving performance in difficult conditions.
\All variants include hardware cybersecurity features such as secure boot, over-the-air firmware updates, and output-data protection. The devices comply with UNECE R155 and ISO 21434 specifications for cybersecurity by design. Two new GNSS automotive modules, the Teseo-VIC6A and Teseo-ELE6A, have been introduced to simplify integration of Teseo VI/VI+ ICs on customer platforms and ensure optimal performance.
AgEagle Aerial Systems has introduced version 2.1.0 of its eBee VISION application software, designed to significantly enhance UAV capabilities. The update expands the system’s functionality, introducing circular and grid mapping features. These new mapping capabilities allow users to generate 2D or 3D maps using external post-processing software for more comprehensive geospatial data.
eBee VISION 2.1.0 can continue missions in GNSS-denied environments and allows manual deactivation of GNSS to prevent jamming or spoofing. It implements the STANAG 4609 standard, the official format for motion imagery exchange within the NATO nations. This involves embedding UAV position and camera information into the videos recorded by the UAV and those broadcasted by the Ground Control Station. Its inclusion in the system enhances interoperability with third-party applications, which is key for military-grade UAVs.
Another improvement in the software update is the enhanced control over the Silent Tactical Landing feature. Users can now manually adjust the landing position on the map, with the system providing range estimates to inform operators of the UAV’s reach. This functionality offers greater flexibility in mission planning and execution, particularly in tactical scenarios requiring precise landing control.
Topcon Corporation and FARO Technologies have entered a strategic partnership to develop and distribute laser-scanning technology solutions. The collaboration aims to expand access to advanced digital reality tools and result in complementary product developments, such as integrating Topcon and Sokkia systems with FARO products.
The initiative focuses on advancing laser-scanning technologies across key sectors, including construction, surveying, mapping, architecture, forensics, building information modeling and industrial plant and process applications. By combining their expertise, the companies plan to enhance software integration and develop joint product solutions to address user needs more effectively.
GEODNET Foundation, the organization overseeing the GEODNET positioning network, has secured $8 million in a strategic funding round. This investment, led by Multicoin Capital with participation from ParaFi and DACM, brings the project’s total financing to $15 million. The funds will be allocated to support the network’s expanding customer base and develop new applications in robotics and physical artificial intelligence.
Real-time kinematics (RTK) is a navigation technique that enhances satellite-based positioning systems to achieve centimeter-level accuracy in real time. According to GEODNET, the company has established itself as the world’s largest RTK network, with more than 13,500 user-deployed reference stations across 4,377 cities in more than 142 countries. These stations provide high-precision location services for various autonomous systems, including trucks, construction vehicles, agricultural equipment, UAVs and robotic lawnmowers.
GEODNET said its network had experienced significant growth, with its on-chain annual recurring revenue expected to increase by more than 400% compared to the previous year. This growth is attributed to the onboarding of new users, including large industrial companies, governmental organizations and enterprises.
The robotics market is projected to expand to more than $200 billion in revenue by 2030, according to studies from GlobalData. Precision location services are crucial for the training and operating of autonomous robots, UAVs and humanoid robots in complex environments. GEODNET aims to provide the necessary data for these systems to navigate safely and autonomously, both individually and in cooperative swarms.
The GEODNET network consists of reference stations that receive GNSS signals. Each station can deliver precise RTK correction data to devices within a range of approximately 20 km to 40 km. Any device equipped with a GNSS receiver — such as cars, UAVs, mobile phones, or tractors — can connect to the GEODNET network.
GEODNET supports multiple reference stations, including HYFIX’s MobileCM Triple-Band GNSS base station. Network contributors can earn GEOD tokens for hosting base stations. The GEOD token is live on the Solana blockchain, and the GEODNET Foundation is supported by several prominent blockchain and DePIN investors, including Borderless Capital, Multicoin Capital, ParaFi, DACM, CoinFund, Pantera, VanEck, Animoca Brands, Finality Capital Partners, Tangent, North Island Ventures, Modular Capital, Road Capital, Reflexive Capital, Reverie, IoTeX, JDI, SNZ and Santiago R. Santos.
“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
Autonomous vessel completes sea trials in Norway
Photo: Kongsberg Maritime
The Reach Remote 1, an uncrewed surface vessel developed by Reach Subsea in partnership with Kongsberg Maritime and Massterly, has been officially delivered after extensive sea trials overseen by Det Norske Veritas and the Norwegian Maritime Authority. This 24 m vessel is equipped with advanced hull-mounted survey sensors and a Work Class Electric ROV, designed to enhance subsea operations by improving efficiency, safety and environmental sustainability.
ESA in search of very low-Earth orbit technologies
Photo: VLEO
The European Space Agency (ESA) is seeking innovative space application ideas for very low-Earth orbit (VLEO), an orbital region between 100 km and 450 km. This initiative aims to explore new frontiers in space technology by soliciting creative solutions from researchers and innovators. ESA said VLEO presents several advantages, including reduced launch costs, enhanced Earth observation capabilities and a more harmless radiation environment. ESA is particularly interested in proposals addressing technological challenges specific to this orbital regime, such as atmospheric drag mitigation, advanced propulsion techniques and specialized satellite designs.
Car tracking leads to successful arrest
Photo: StarChase
The Pinole, Calif., Police Department utilized the StarChase GPS-based tracking system to safely apprehend suspects in a stolen vehicle. Instead of engaging in a dangerous high-speed chase, officers launched a GPS-enabled tracker that stuck to the vehicle, offering real-time location tracking. The Pinhole Police Department told The Richmond Standard, “This operation highlights how technology and collaboration keep our community safe — by reducing the dangers of high-speed pursuits while ensuring accountability and swift action.”
3D mapping of New Zealand coastline
Photo: nazar_ab / E+ / Getty Images
New Zealand has launched a coastal mapping project to help communities understand and mitigate climate change impacts. Led by Toitū Te Whenua Land Information New Zealand, the initiative will use lidar technology to create detailed 3D maps of up to 40% of the country’s coastline throughout three years. The $30.2 million project involves mapping 4,780 square km of coastal and seafloor terrain using specially equipped planes with high-resolution scanning equipment. Two suppliers, Woolpert NZ and NV5 Geospatial, will conduct the mapping across the North and South Islands, beginning in regions such as the Bay of Plenty and Invercargill.
The Air Force Research Laboratory awarded Xona Space Systems a contract to demonstrate and refine its commercial positioning, navigation and timing (PNT) solutions for Department of Defense (DOD) missions. The agreement, facilitated through the Space Technology Advanced Research — Fast-tracking Innovative Software and Hardware (STAR-FISH) program, increases Xona’s total contracted commitments to more than $20 million.
Under the contract, Xona will evaluate its PULSAR satellite navigation service across commercial user devices in scenarios where GPS/GNSS signals may be denied or challenged. Testing will focus on assessing resistance to jamming and spoofing, reducing multipath interference and implementing secure key distribution protocols. The initiative aims to expedite the development of advanced alternative PNT capabilities in commercial off-the-shelf equipment, aligning with DOD requirements for rapid deployment.
Xona has collaborated with GPS/GNSS hardware providers QinetiQ, StarNav and Locus Lock to integrate PULSAR-enabled devices. These partners will participate in performance demonstrations as part of the multi-year effort, which includes leveraging Xona’s simulation tools and plans to utilize the first PULSAR satellite scheduled for launch in June 2025.
When we discuss the security of GNSS/PNT systems, we nearly always focus on interference — i.e., meaconing, intrusion, jamming or spoofing. However, GNSS/PNT systems are embedded in systems of systems that also offer many other opportunities for cyberattacks.
What should we do about it?
Ellen Hall
“The key is platform architecture, specifically ensuring robust spatial and temporal partitioning between safety-critical and non-safety-critical functions. Safety-critical functions, such as navigation and autopilot, must be isolated from non-safety-critical functions, such as mission compute, where artificial intelligence typically operates. This partitioning minimizes the scope and effort required to produce design assurance artifacts for airworthiness certification. Additionally, it enhances security by reducing potential attack vectors through the isolation of safety-critical and mission-critical capabilities.”
— Ellen Hall Imminent Federal
Mitch Narins
“An old mariner’s proverb is: ‘The prudent mariner never relies solely on any single aid to navigation.’ A more recent statement offers: ‘With so many pieces of sophisticated electronic equipment at our beck and call it would seem some are lulled into complacency and are ignoring basic seamanship.’ In September 2018, the U.S. Naval Institute published an article titled, ‘Professional Mariners Cannot Rely on Electronics Alone.’ The recent news that the U.S. ITAR restrictions on multi-element antenna arrays will be lifted (thanks to many in our community who have lobbied hard for this for many, many years) is excellent news. It will help and was a necessary change — but it is not sufficient. It certainly does not remove the need to pursue complementary, PNT solutions that will ensure the safety, security, and economic well-being of PNT users and their PNT-dependent systems worldwide. From a basic systems engineering perspective, incorporating multiple solutions with independent failure mechanisms is ultimately the end product that we in the PNT community should all be seeking. We must not forget, however, a key element of many of these systems: the human in the loop, who, if continually provided the opportunity to train in PNT-challenged environments, often can be the ultimate system safety element. This will require the design of our PNT services to ensure that the human factors designed into these systems include sufficient information for the human component to understand an off-normal situation and have the training and skills to take the appropriate corrective actions.”