Trimble and PTx Trimble have introduced Trimble IonoGuard, a new technology designed to enhance RTK GNSS signal reliability for precision agriculture applications. The system aims to improve positioning accuracy and reduce signal loss during challenging ionospheric conditions.
IonoGuard is now available for users of the PTx Trimble NAV-900 guidance controller and Trimble base stations equipped with the ProPoint positioning engine. The technology was developed to maintain RTK correction integrity and minimize positioning dropouts during periods of high solar activity.
Solar activity peaks every 11 years, with the next maximum predicted in 2025. This phenomenon can significantly impact GNSS signal stability, potentially affecting precision positioning. Solar Cycle 25, which began in 2024 and is expected to continue through 2026, may present substantial challenges with the possibility of global disruptions.
While solar cycle disturbances often go unnoticed by the public, high-precision RTK GNSS users in equatorial regions frequently experience impacts from solar activity throughout the year, which can lead to costly interruptions in agricultural operations.
IonoGuard is accessible through the latest PTx Trimble Precision-IQ firmware release. When used with compatible GNSS hardware, the system aims to deliver improved RTK performance during both routine operations and periods of solar disturbance.
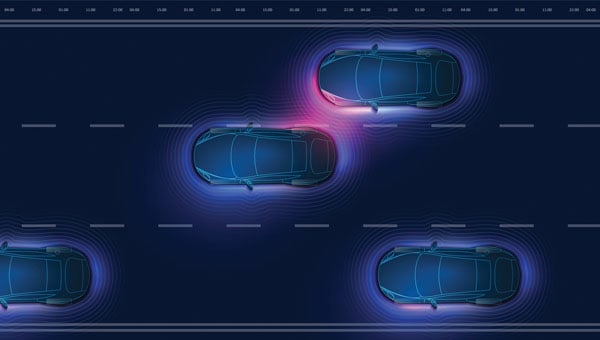
GNSS researchers presented hundreds of papers at the 2024 Institute of Navigation (ION) GNSS+ conference, which took place Sept. 16-20 in Baltimore. The following papers focus on high-accuracy positioning for autonomous vehicles in various environments. The papers are available here.
High-accuracy and resilient GNSS receiver for autonomous vehicles
The G3STAR GNSS receiver, a key component of the GAMMS Horizon 2020 project, is designed to improve high-definition navigation map production for autonomous vehicles. This Galileo-based receiver leverages the constellation’s Open Service features, including the High Accuracy Service (HAS) and Navigation Message Authentication (OSNMA). The research team shared that G3STAR’s ability to obtain and decode HAS messages from Galileo E6-B signals, as well as to process OSNMA bits from live Galileo E1-B I/NAV messages, demonstrates its advanced capabilities in providing secure and precise navigation data.
Preliminary tests highlight G3STAR’s proficiency in utilizing Galileo’s new services. However, the research team shared that further evaluation is necessary to fully assess its impact within the GAMMS project. Plans include validating the HAS data’s effect on navigation accuracy, conducting field tests to evaluate OSNMA availability in various environments and assessing the influence of the Chip Scale Atomic Clock on receiver performance. Additionally, comparing the G3STAR’s performance to commercial off-the-shelf receivers will be crucial in determining its overall contribution to the GAMMS navigation system and HD map generation. These evaluations will be carried out during upcoming test campaigns, providing valuable insights into G3STAR’s potential to advance autonomous vehicle navigation.
Filipe Carvalho, Ricardo Prata, Bruno Cardeira, Carlota Cardoso, Rui Nunes and António Fernández; “High-Accuracy and Resilient GNSS Receiver for an Autonomous Vehicle.”
GNSS/INS positioning software library
The autonomous vehicle industry has seen significant interest and investment throughout the past 15 years, with numerous practical applications emerging in the market. However, the technology for functionally safe GNSS/INS localization in autonomous vehicles is still not fully established. This gap is particularly crucial in safety-critical applications, where positioning algorithms must be robust against potential faults, especially in challenging environments. This paper highlights Hexagon’s Safety-Critical Positioning Solution, which addresses this need by providing both precision and safety for autonomous land vehicles.
The Positioning System is a safety-first software library that integrates GNSS signals, state space corrections from the TerraStar-X Enterprise service, inertial measurement units (IMUs) and additional vehicle sensors. This system employs an extension of Receiver Autonomous Integrity Monitoring techniques, originally developed for the aviation industry. It computes multiple navigation solutions using a solution separation technique, including an “all-in-view” solution and several subset solutions that exclude various fault hypotheses. These solutions are used to calculate Protection Levels (PLs), which provide an estimated upper bound on positioning errors, accounting for systematic biases and measurement faults. The PLs can be compared against alert limits to determine whether the navigation solution is sufficiently accurate for autonomous decision-making.
Eduardo Infante, Rudi Gaum and Laura Norman; “Demonstration of a Functionally Safe GNSS/INS Positioning Software Library for Autonomous Land Vehicles.”
Unmanned ground vehicles in off-road environments
This paper explores the emerging potential of radar for localization in GNSS-denied scenarios, particularly in challenging off-road environments where lidar-based systems struggle. The research focuses on two distinct settings: a dense forest and an underground mine. To address the localization challenges in these environments, the team developed a pipeline that combines an adaptive extended Kalman filter (EKF) for unstructured forested regions with a factor graph approach that fuses EKF estimates and point-to-plane radar iterative closest point (ICP) measurements for structured underground environments. The results demonstrate significant improvements in localization accuracy compared to existing methods, with the adaptive EKF proving particularly effective in forested areas.
The study provides valuable insights into the integration of radar and IMU data for vehicle localization in GPS-denied scenarios. While the adaptive EKF outperformed conventional EKF in structured outdoor settings, the standard EKF showed better performance in the highly dynamic conditions of the underground mine. The factor graph approach exhibited improved tracking performance, especially in reducing lateral drift along straight trajectory segments. The research also highlights the importance of selecting high-quality ICP registrations for radar-based SLAM. These findings pave the way for future research directions, including refining adaptive EKF for varied environments, exploring radar-based navigation on feature-sparse roads and enhancing the factor graph framework to incorporate additional sensor modalities.
Petar Mitrev and Mohamed Atia, “Radar-Inertial Localization for Unmanned Ground Vehicles in GNSS-Denied Off-Road Environments.”
GNSS plays a vital role in autonomous systems, providing essential positioning, velocity and timing (PVT) information for platforms such as autonomous vehicles, UAVs and ships. However, GNSS vulnerability to spoofing attacks poses significant security risks, potentially disrupting decision-making processes in these systems. To address this issue, researchers have developed a novel approach called Clock Drift Monitoring (CDM) for detecting GNSS spoofing in autonomous vehicles. Unlike previous methods that focused on directly detecting Doppler bias from measurements, CDM indirectly monitors the adverse impact of Doppler bias on the PVT solution, overcoming challenges associated with bias extraction from raw measurements.
The CDM technique exploits user clock drift derived from Doppler positioning as a detection metric. Under normal conditions with authentic GNSS signals, the clock drift remains stable, reflecting the user’s frequency source stability. However, spoofing conditions introduce counterfeit signals with consistent Doppler bias across all measurements, resulting in abnormal clock drift variations. A Generalized Likelihood Ratio Test-based detector identifies these variations, offering a practical and flexible method for GNSS spoofing detection. Field tests have validated the CDM technique’s effectiveness in real-world scenarios, demonstrating its robustness as a solution for autonomous vehicles to counter emerging cyber threats. This method’s ease of implementation, broader applicability and inherent robustness make it a promising approach for safeguarding autonomous systems against counterfeit GNSS signals.
Ziheng Zhou, Hong Li, Yimin Deng and Mingquan Lu Tsinghua; “Clock Drift Monitoring Based GNSS Spoofing Detection Method for Autonomous Vehicles.”
Since the dawn of GPS, researchers have worked to improve the accuracy of estimated positioning, navigation and timing (PNT) from the receiver-derived pseudorange, carrier-phase and Doppler measurements. While the pseudorange-based accuracy of standard point positioning (SPP) at the level of 1s to 10s of meters sufficed for most users, carrier-phase-based relative positioning, real-time kinematic (RTK), network RTK (NRTK) and precise point positioning (PPP) measurement processing techniques were developed to provide decimeter-to-centimeter-level PNT under various constraints. Of these approaches, PPP — generally based on the state-space reduction of measurement errors to a single GNSS receiver from a wide area calibration network — has evolved dramatically. Why should readers read this article, as PPP has been around for some two decades? Well, some communities may consider old performance specifications of conventional/classical PPP, a rather niche technology, for static use with post-processing of measurements, resulting in tens of minutes for solution convergence to the decimeter level. However, there have been many performance advances, with more coming, affecting who uses the technology and how.
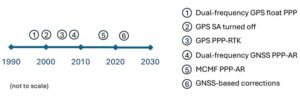
Figure 1: Timeline of PPP evolution.
Figure 1 illustrates the timeline of PPP evolution, from:
The development of the original technique in the late 1990s to reduce static GPS network measurement processing load.
The removal of GPS Selective Availability (SA), simplifying precise satellite clock prediction.
The development of PPP-RTK, in which regional RTK-derived corrections are used to reduce position convergence time and increase accuracy.
Successful isolation of PPP GPS dual-frequency carrier-phase ambiguities to increase accuracy.
Full multi-constellation, multi-frequency (MCMF) processing to greatly reduce position convergence time.
The introduction of GNSS constellation provider corrections. (Individual advances will be discussed in the Elements section.)
From initial scientific uses to becoming the commercial standard in remote areas or regions with limited GNSS terrestrial infrastructure, these research contributions are leading to ubiquitous open sky decimeter to centimeter-level positioning with a range of available corrections, increasing accuracy and reducing initial convergence for more applications.
Essentials
In the late 1990s, to improve positioning accuracy over SPP and avoid the heavy computational burden of network-adjusted relative positioning processing between many receivers, PPP algorithms (detailed in the Elements section) were formulated with undifferenced measurements between tracked satellites and a single receiver (Zumberge et al. 1997). Both pseudorange and carrier-phase measurements are utilized, with the former presenting many decimeter-level references and the latter ambiguous centimeter-level ranging. By filtering continuously tracked measurements over time, decimeter- to centimeter-level positioning is possible, as the state terms, including real-valued estimates of biased carrier-phase ambiguity terms — resulting in tens of minutes to hours of initial convergence time. This approach represents Hatch filtering in the position state rather than the observation domain. Key to PPP is the use of precise satellite orbit and clock estimates derived from a global reference network, which can receive measurements from an entire GNSS constellation. Additionally, to maximize performance, remaining error sources are modeled or estimated. While PPP was initially not as accurate as RTK and, more importantly, took tens of minutes to hours to attain solution convergence, the technique did not have the terrestrial infrastructure constraints of RTK or network RTK, which require reference receivers ~10 km to 15 km and ~75 km away, respectively. Once GPS Selective Availability was turned off in 2000, GPS satellite clock modeling became simpler and more accurate, and scientific and commercial PPP solutions quickly became the standard measurement processing technique for applications requiring decimeter-level accuracy in remote areas or places where it was not economically viable to install (an) RTK base station(s).
In the 2000s, two different approaches were developed to deal with the shortcomings of PPP: PPP-RTK and PPP-AR. In PPP-RTK, state space corrections from a regional NRTK solution are efficiently transmitted and applied as PPP corrections. As NRTK resolves carrier-phase ambiguities and estimates local atmospheric (ionospheric and tropospheric) refraction and reference station position all in a least-squares sense, PPP-RTK can produce centimeter-level positioning in seconds within a reference station network, where stations can be tens to hundreds of kilometers apart. In PPP-AR, the ionosphere-free linear combination of dual-frequency pseudorange and carrier-phase measurements is not employed; rather, the uncombined version, and the pseudorange and carrier-phase observation models, are extended to include and isolate satellite and receiver fractional carrier-phase biases, allowing PPP ambiguity resolution (AR) to integers with additional satellite code and phase biases from the network solution and between satellite single-differencing. Both approaches are having significant scientific and commercial success.
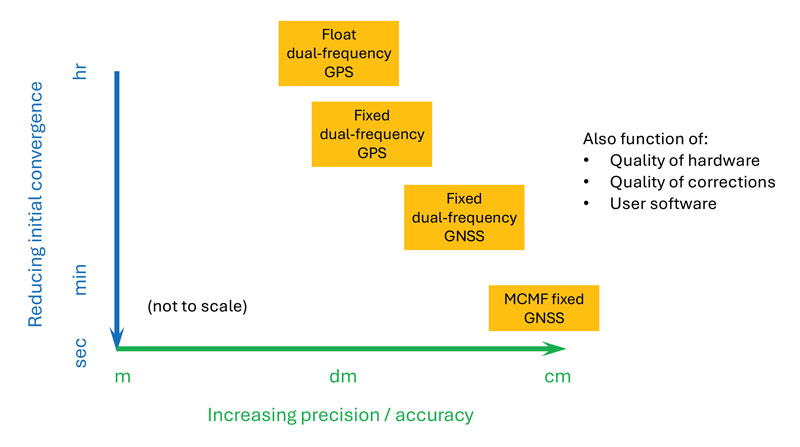
Figure 2: PPP and PPP-AR technology evolution in terms of accuracy versus convergence time.
Unlike RTK, which has the benefit of significant additional calibration information from the reference station, PPP(-AR) must rely only on satellite-based corrections and the strength of the single-receiver observations. In recent years, additional GNSS constellation satellites and frequencies have been brought on-line in large numbers, and GNSS constellation-provided PPP corrections have begun (Xu et al. 2021; Fernandez-Hernandez et al. 2022; Naciri et al. 2023). These developments have greatly increased estimation redundancy, making near-instantaneous PPP without regional reference stations possible (Naciri and Bisnath 2023). This evolution of PPP technology in terms of positional accuracy versus convergence time is illustrated in Figure 2. Therefore, it may be possible to a) dissolve the old GNSS duality of niche, professional-grade versus mass-market, low-cost hardware and software with low-cost hardware utilizing PPP (and RTK and PPP-RTK) software countermeasures to obtain precise PNT; and b) with PPP corrections from GNSS constellations, perhaps, as a reversion to SPP, to have PPP be the natural operational mode of precise GNSS PNT (Bisnath 2020).
Elements
Theoretical development
The PPP measurement processing technique utilizes the GNSS pseudorange (code) and carrier-phase (phase) observables. For receiver r and satellite s, the respective code and phase measurements on frequency can be defined as:
where and Φi : pseudorange and carrier-phase measurements, respectively, in meters; ρ: geometric range between receiver and satellite; c: vacuum speed of light; dtr and dts: receiver and satellite clock offset from GPS Time, respectively; γi = ƒ ⁄ ƒ : ratio of frequencies applied to first frequency ionospheric delay I to recover ionospheric delay at frequency i; Tr : zenith troposphere wet delay; M: mapping function to map to satellite-receiver line-of-sight troposphere delay; λi = c ⁄ƒi: signal’s wavelength; N : integer ambiguity on frequency i; br,i and b: receiver and satellite pseudorange hardware biases, respectively; Br,i and B : receiver and satellite phase biases, respectively; and рi and Φi : residual unmodeled errors such as multipath and noise in code and phase measurements, respectively.
where and Φi : pseudorange and carrier-phase measurements, respectively, in meters; ρ: geometric range between receiver and satellite; c: vacuum speed of light; dtr and dts: receiver and satellite clock offset from GPS Time, respectively; γi = ƒ ⁄ ƒ : ratio of frequencies applied to first frequency ionospheric delay I to recover ionospheric delay at frequency i; Tr : zenith troposphere wet delay; M: mapping function to map to satellite-receiver line-of-sight troposphere delay; λi = c ⁄ƒi: signal’s wavelength; N : integer ambiguity on frequency i; br,i and b: receiver and satellite pseudorange hardware biases, respectively; Br,i and B : receiver and satellite phase biases, respectively; and рi and Φi : residual unmodeled errors such as multipath and noise in code and phase measurements, respectively.
In order to eliminate ionospheric refraction, the original PPP solution forms the ionosphere-free (IF) linear combination of the dual-frequency GPS code and phase measurements:
From this combined form, the IF float PPP equations are (Kouba and Héroux 2001):
where the terms with tildes are biased by other terms from the starting observation equations, but allow for enough redundancy for user position, receiver clock offset, a zenith tropospheric term and real-valued, biased phase ambiguity terms to be estimated. In a sequential least-squares or Kalman filter optimal estimation process, positional accuracy depends on the quality of the satellite orbit and clock corrections, along with applying additional error modeling (including satellite and receiver antenna phase center offset and variation, solid Earth tides, ocean loading and phase wind-up), and, most importantly, the quantity, geometrical distribution and quality of the code and phase measurements. The state is initialized with m-level pseudorange measurements and slowly converges to the centimeter-level over tens of minutes to hours as the real-valued, biased phase ambiguity estimates reach steady state. This original or classic PPP solution, characterized by slow convergence to a fixed ambiguity-like positioning solution, may be what some in the community still think of as PPP.
PPP-RTK was developed as a means to remove these shortcomings of classical, float PPP by supplying PPP-like error state corrections from a regional RTK network to allow near-instantaneous carrier-phase ambiguity resolutionAR, (AR), solving both PPP’s convergence and accuracy problems (Wübbena et al. 2005). Significant operational improvements include increased spacing between (N)RTK reference stations, so less GNSS terrestrial infrastructure is required, and significant reduction in data transmissions from observation space representation (OSR) to state-space representation (SSR). By providing regional atmospheric corrections and ambiguity fixing, RTK-like performance is achieved but with larger CORS spacing. This approach has found commercial success in economically sustainable regions.
In parallel, active research continued in PPP-AR, given its desirable characteristic of not requiring regional reference stations. Multiple solutions were developed (e.g., Collins et al. 2008; Ge et al. 2008; Laurichesse et al. 2009), each of which reformulated the PPP observation equations to isolate the phase ambiguities, while overcoming datum defects in the estimation process. For example, the decoupled clock model (DCM) (Collins et al. 2008) isolates the phase ambiguities and directly estimates them as integers. The DCM does not make any assumptions regarding receiver biases and uses separate terms for code and phase clocks due to the imprecision in their synchronization — hence the model’s name. Satellite code and phase biases are required, along with satellite orbit and clock corrections. Then, standard AR methods, such as LAMBDA, can be applied. In the DCM, the fundamental code and phase equations are altered to:
where dtr, and δtr, are the receiver code and phase clocks, respectively. The receiver pseudorange bias br,i is parameterized in such a way that it is grouped into the receiver pseudorange clock forming dtr and ionospheric delay forming I . These terms are derived to be:
Through substitution, the DCM dual-frequency observation equations become:
In decoupling the receiver clocks, the carrier-phase measurements lose their datum. To remove the estimation singularities, one satellite is selected as the reference satellite, its ambiguities are fixed to arbitrary integer values and used for between-satellite single-differencing. N = N + δN , where N are the arbitrarily set integer ambiguities on frequency i and δ N are the differences between the actual integer ambiguities and the arbitrarily set ones. Carrier-phase cycle slips must be detected and changes to the reference satellite accounted for. While initial solution convergence is still a characteristic of uncombined, dual-frequency PPP-AR, the uncombined model solved the problem of brief data outages (solution re-convergence), as the slant ionosphere estimates are used as a bridging parameter between small data gaps.
The dual-frequency model can be expanded to, e.g., quad-frequencies for multi-constellation, multi-frequency (MCMF) PPP-AR. Accounting for the use of a reference satellite per constellation, accounting for any spatial and temporal reference system differences between constellations, and additional inter-frequency pseudorange biases (IFBs) the up to quad-frequency DCM formulation can be derived as:
with:
There is therefore the need for accurate and consistent MCMF satellite orbit, clock, code bias and phase bias corrections. Some constellation-based corrections, e.g., from QZSS, BDS and Galileo, are appearing.
There is therefore the need for accurate and consistent MCMF satellite orbit, clock, code bias and phase bias corrections. Some constellation-based corrections, e.g., from QZSS, BDS and Galileo, are appearing.
Results and analysis
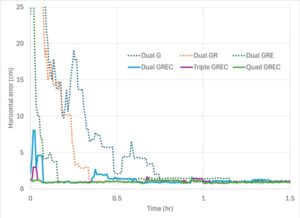
Figure 3: PPP-AR horizontal positioning error for various combinations of GNSS constellations and number of frequencies showing average initial convergence for IGS stations CUSV (Thailand), KIR8 (Sweden) and RABT (Morocco) on day of year 128 in 2024. Results presented are the average of 24 hours of data, reset every three hours.
How has PPP positioning solution convergence and accuracy evolved? The above model is now used to illustrate the performance of MCMF PPP-AR with up to four frequencies. The quad-frequency model has been implemented in the York-PPP client engine developed at York University. For performance illustration purposes, Centre national d’études spatiales (CNES) MCMF correction products are used for consistency and one day (day of year 128 in 2024) of high-quality MCMF GNSS observations are used from each International GNSS Service (IGS) stations CUSV in Bangkok, Thailand, KIR8 in Kiruna, Sweden, and RABT in Rabat, Morocco. Note that data from other days and other comparable stations produce similar positioning results. Simulated real-time, sequential least-squares, kinematic processing was performed for the following observation scenarios: 1) dual-frequency GPS (dual G); 2) dual-frequency GPS and GLONASS (float), with no ambiguity fixing of the frequency-division, multiple access GLONASS signals (dual GR); 3) dual-frequency GPS, GLONASS and Galileo (dual GRE); 4) dual-frequency GPS, GLONASS (float), Galileo and BeiDou (dual GREC); 5) up to triple-frequency GPS, dual-frequency GLONASS (float), triple-frequency Galileo and triple-frequency BeiDou (triple GREC); and 6) up to triple-frequency GPS, dual-frequency GLONASS (float), quadruple-frequency Galileo and quadruple-frequency BeiDou (quad GREC). Operational effects, such as correction latency, are not considered. Figure 3 demonstrates MCMF PPP-AR horizontal error initial solution convergence for these scenarios, averaged from each 24-hour dataset, reset every three hours across the three global stations.
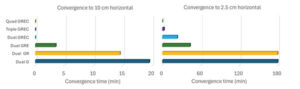
Figure 4: PPP-AR horizontal positioning convergence times for various combinations of GNSS constellations and number of frequencies to 10 cm and 2.5 cm for data used in Figure 3.
The dashed time series in figure show the benefits of adding constellations in the PPP-AR processing. From the average of the dual-frequency GPS solutions, the addition of each constellation reduces convergence time by approximately one-half. Then, by adding additional frequencies, convergence time is further reduced to basically instantaneous convergence using available measurements on up to four frequencies from all four GNSS constellations. These results bode well for GNSS data collection in sky-obstructed areas or with lower-quality hardware. Figure 4 provides the convergence times for the average solutions from each processing scenario to reach and sustain below 10 cm and 2.5 cm horizontal error, respectively. These are typical specifications for numerous static and kinematic applications. Four constellation, dual-frequency data are required to attain 10 cm horizontal positioning error or better near-instantaneously. However, to achieve the 2.5 cm convergence definition, at least triple-frequency data are necessary. The post-10 cm convergence horizontal solution accuracy, as defined by rms error, is 9 cm for dual-frequency GPS and 1 cm for each of the GREC processing scenarios. The post-2.5 cm convergence horizontal solution accuracy, as defined by rms error is 17 cm for dual-frequency GPS and 4 cm for each of the GREC processing scenarios.
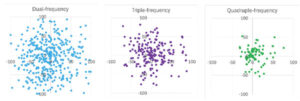
Figure 5: MCMF PPP-AR horizontal positioning error for dual-frequency GNSS (left), up to triple-frequency GNSS (center) and up to quadruple-frequency GNSS (right) for IGS stations CUSV (Thailand), KIR8 (Sweden) and RABT (Morocco) on day-of-year 128 in 2024. Results are epoch-by-epoch solutions in the north and east directions in centimeters with 8,640 position estimates in each scenario.
What if a more robust PPP solution is considered that also further analyzes the introduction of additional frequencies? The same three-station, one-day dataset can be processed in an epoch-by-epoch mode, where all filter states are reset. Therefore, there is no filtering with no assumptions about system dynamics. In this case, using a 30-second sampling rate, results in 8,640 position estimate “snapshots” — a robust process of estimation that can be useful for, e.g., clearly defining integrity for safety-of-life applications. The MCMF PPP-AR results for 1) dual-frequency GPS, GLONASS (float), Galileo and BeiDou (dual GREC); 2) up to triple-frequency GPS, dual-frequency GLONASS (float), triple-frequency Galileo and triple-frequency BeiDou (triple GREC); and 3) up to triple-frequency GPS, dual-frequency GLONASS (float), quadruple-frequency Galileo and quadruple-frequency BeiDou (quad GREC). Figure 5 illustrates the epoch-by-epoch horizontal positioning performance (in cm) for these three scenarios using planimetric subplots. Most position estimates for each scenario are near each subplot center. Adding measurements from the additional frequencies from the dual-frequency base to up to three frequencies and then up to four frequencies for the same four constellations greatly improves horizontal positioning precision and greatly reduces the quantity and magnitude of positioning outliers.
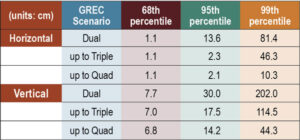
Table 1: MCMF PPP-AR positioning error for 68th, 95th and 99th percentiles (in cm) for data used in Figure 5.
Table 1 provides the epoch-by-epoch MCMF GNSS PPP-AR horizontal and vertical 68th (1-sigma), 95th (2-sigma) and 99th (3-sigma) percentile positioning error statistics for the same dataset. At the 68th percentile, all scenarios produce centimeter-level horizontal and sub-decimeter-level vertical positioning. However, at the 95th percentile, only triple- and quad-frequency processing can produce centimeter-level positioning in the horizontal component and near decimeter-level positioning in the vertical. To assess extreme position estimate outliers, the 99th percentile statistics show that dm-level horizontal positioning can be maintained with quad-frequency processing.
Table 2: Average estimation redundancy for data used in Figure 5.
The MCMF PPP-AR filtered results indicate that near-instantaneous, cm-level PPP is achievable with quality geodetic observations. The epoch-by-epoch, unfiltered results imply that robust, centimeter-level PNT is achievable. Table 2 provides the average redundancy in the epoch-by-epoch processing, where the redundancy is the difference between the number of measurements used and the estimation states. This measure provides insight to how the increase in the number of measurements, while not increasing the number of satellites or the dilution of precision, significantly improves PNT estimation performance for PPP-AR — as this is a measurement-driven technique. The average redundancy increases from 34 to 62 when expanding from dual-frequency GPS to dual-frequency GPS + Galileo and to 121 when using dual-frequency measurements from all constellations. Additionally, increasing processing to include up to triple-frequency measurements and quad-frequency measurements grows this metric to 154 and 183, respectively. The estimation process then becomes more robust against measurement errors and biases. It has more measurement strength to estimate all state parameters, including slant ionosphere refraction terms and integer ambiguities, allowing for improved position estimation precision.
Evolutionary
MCMF PPP-AR performance continues to improve. Positioning performance for quality geodetic measurements can produce horizontal centimeter-level positioning performance nearly instantaneously. Robust performance can be obtained with epoch-by-epoch processing, resulting in centimeter-level and few-centimeter-level horizontal and vertical positioning at the 95th percentile level using up to quadruple frequency measurements. Also, inclusion of additional measurements from additional frequencies greatly improves estimation redundancy, thereby improving state estimation.
Future research developments, testing and implementation include: adding measurements from available fifth frequencies; investigating less reliance on noisy and multipath-prone pseudorange measurements; expanding robust near-instantaneous PPP in urban environments; further defining/characterizing PPP integrity and safety integrity levels; having PPP be an independent or complimentary solution to/with (N)RTK for precise PNT; minimize requirements for atmospheric corrections; further use of PPP in mass-market hardware; and further integration of PPP as part of sensor suite solutions (e.g., automotive, smartphone, UAV, robotics, etc.) for resilient PNT.
Finally, what is the usefulness of the research in our lives? PPP measurement processing for GNSS is the scientific and industry standard for many user applications. There continues to be growing commercial adoption of this evolving technology, including expanded use in traditional (N)RTK precise applications, mass-market applications using low-cost hardware, and safety-of-life applications, including automotive, other passenger vessels, smartphones, robotics, UAVs and for aids to pedestrians.
Read a roundup of recent products in the GNSS and inertial positioning industry from the March 2025 issue of GPS World magazine.
Surveying and Mapping
Photo: Eos Positioning Systems
New Eco-Friendly Carrying Case For Eos Positioning Systems’ receivers
The Skadi Gold, Skadi 300 and Skadi 200 GNSS receivers will now be shipped in a field-rugged carrying case made entirely from recycled materials. The case is designed to meet the demands of professionals who utilize GNSS technology in challenging environments. Its construction incorporates durable, eco-friendly materials that can withstand various field conditions, from remote wilderness areas to urban construction sites.
A key feature is its composition of 100% post-consumer recycled resin, which significantly reduces waste and promotes environmental sustainability, according to the company. It is specifically engineered to be shock-resistant and weatherproof.The case is provided as a standard inclusion with every purchase of the Skadi Gold, Skadi 300 or Skadi 200 GNSS receivers at no additional cost.
Multibeam Sonar Designed for bathymetric surveying
The Gemini 1200id is built on the same robust platform as the Gemini 720is multibeam sonar. The device features a 120° horizontal field of view, operating at both 720 kHz and 1,200 kHz acoustic frequencies.
The Gemini 1200id incorporates advanced noise reduction technology to significantly improve the attenuation of waterborne electrical noise to enhance imaging performance. An integrated speed-of-sound sensor ensures high positional accuracy of displayed targets, while CHIRP processing technology enhances target separation over extended ranges.
Compatibility with Tritech’s Genesis software package allows users to control multiple Tritech products from a single interface to streamline operations. The company has also made software development kits available for Windows and Linux operating systems to integrate into various platforms. The sonar’s design includes a custom-developed analog front-end solution with fully differential receiver channels, making it ideal for longer-range applications.
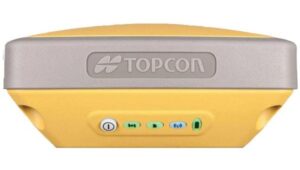
HiPer XRa is a GNSS receiver for surveying, mapping and construction applications. It can benefit a wide variety of users, including construction professionals, surveyors, geographic information systems (GIS) professionals, archeologists, engineering firms and more. The HiPer XR supports GPS, GLONASS, Galileo, BeiDou, IRNSS, QZSS and SBAS.
The new receiver has advanced Topcon Integrated Leveling Technology (TILT) compensation, featuring a calibration-free and magnetic interference-immune integrated IMU that provides up to 60° of tilt for precision measurements in challenging positions. It has signal integrity protection, anti-jamming and anti-spoofing capabilities. Through the myTopcon NOW! website, users can access online training materials, firmware updates and additional software resources.
Airborne Lidar System Ideal for coastline and river surveying
CoastalMapper is an airborne bathymetric lidar system for coastline and river surveying. The CoastalMapper can survey coastlines and rivers 250% faster than previous sensor models, according to Leica Geosystems.
It is suitable for various mapping applications, from assessing infrastructure resilience to monitoring river floods and conducting environmental investigations.
It features a high-performance bathymetric lidar module, a Leica TerrainMapper-3 topographic lidar and an imaging sensor, integrated into a compact and lightweight sensor head. This allows the CoastalMapper to capture up to 1 million bathymetric data points and 2 million topographic data points per second while providing high-resolution imagery with a 5-cm ground sampling distance at typical flying heights.
It integrates with Leica Geosystems’ airborne mapping workflows and offers cluster processing capabilities, allowing users to analyze large datasets and reduce the time from data collection to final deliverables. These outputs can include classified point clouds, digital terrain and surface models, and various imaging products.
Surveying Kit Streamlines base station and checkpoint setup
WingtraGROUND, a comprehensive survey kit, streamlines base station and checkpoint setup for on-site post-processing kinematic surveys with the WingtraONE Gen II, a vertical takeoff and landing UAV. The kit combines receivers, checkpoints and tools into a single, portable workflow.
The system integrates hardware components with a Wingtra tablet interface, which can help surveyors confirm correct receiver placement and avoid common errors associated with improper base station setup and inaccurate coordinates.
Wingtra receivers, equipped with Emlid Reach RS3 technology, provide accuracy within 2 cm, meeting high standards for aerial data validation. These receivers can also function independently for terrestrial surveys in real-time kinematic mode, including point collection and stakeout for various applications.
Galileo HAS-Enabled Receiver Offers positioning capabilities with 20 cm accuracy
The Geode GNS3H supports Galileo High Accuracy Service (HAS). It offers positioning capabilities with 20 cm accuracy worldwide without requiring additional infrastructure or subscriptions.
It is built to withstand tough conditions, making it ideal for demanding fieldwork. The device offers various accessories, including the Geode Grip, which combines the Geode with a data collection device of choice into a single handheld solution. A backpack strap kit and survey pole are also available to enhance mobility and flexibility in the field. The GNS3H can be used for surveying, agriculture, construction, forestry, mining and archaeology.
Expanded Mapping Portfolio 3D mapping technologies and more
Topcon Positioning Systems has become an authorized distributor of Pix4D’s photogrammetry software portfolio.
The partnership aims to enhance reality capture solutions across various industries, including surveying, mapping, utilities infrastructure, public safety, forensics, and architecture, engineering and construction.
The agreement streamlines the procurement process for end users by allowing them to access Pix4D’s advanced photogrammetry software solutions through Topcon’s global distribution network.
The GNSS real-time kinematic (RTK) 5 Click — a compact add-on board for high-precision positioning and navigation demands — features the UM980, an all-constellation multifrequency RTK positioning module from Unicore, with the advanced NebulasIV SoC for enhanced performance.
It supports Swift Navigation’s Skylark precise positioning service, multiple GNSS constellations and RTK positioning for centimeter-level accuracy. The board also features JamShield technology for robust performance in challenging environments, USB connectivity for easy configuration and visual status indicators for module status and GNSS signal reception.
It can be used for a variety of applications, including surveying and mapping, precision agriculture, UAVs, autonomous robots and autonomous driving.
Multi-Band GNSS Antenna Can operate in urban environments
Levity Series’ AHP24510 (L1/L2/L-Band) and AHP54510 (L1/L5/L-Band) directional patch antennas are designed to receive signals from GPS, Galileo, GLONASS and BeiDou satellite constellations.
These antennas offer faster and more accurate signal acquisition and lock, specifically in urban environments. The L-Band capability allows compatibility with high-precision GNSS correction services. The multi-band antennas offer integral redundancy to minimize satellite security blind spots and reduce energy consumption due to faster acquisition, requiring less system uptime to save power.
The Levity Series active antennas feature a 45 mm x 45 mm x 10 mm wide-band, dual-stacked patch design with a dual-feed, low noise amplifier, providing 28 dB to 29 dB gain and filtering. They operate with a maximum antenna VSWR of 1-to-1 from 1,207 MHz to 1,603 MHz, and the passive antenna efficiency ranges from 39.93% to 68.51% in the L1 band. These antennas use right-hand circular polarization to mitigate multi-path interference.
The Levity Series includes other multi-band products for high-precision applications, such as the HP24510A and HP54510A stacked-patch passive components, and the TFM.120A surface-mount front-end module, which covers the full multi-band GNSS spectrum including L-band. These antennas are suitable for various applications, including wearables, transportation, robotics, precision agriculture and autonomous vehicles.
The M9PLUS-HCT-A-SMA is an active multi-frequency GNSS antenna designed for high-accuracy applications. It supports L1/L2/L5 GPS, Galileo, Beidou and GLONASS bands, as well as L-band correction services. The antenna utilizes Maxtena’s proprietary Helicore technology, which offers advanced pattern control, polarization purity and efficiency in a compact form factor.
It integrates a pre-filter specifically engineered to mitigate LTE interference. This is crucial for maintaining signal integrity in environments with dense mobile communication networks, where LTE signals can overlap with GNSS frequencies. The pre-filter can effectively block out-of-band LTE signals, reducing intermodulation risks and ensuring clear GNSS signal reception.
The M9PLUS-HCT-A-SMA is built with rugged, IP67 automotive-grade components and includes an integrated SMA connector. It also features an O-ring for enhanced environmental sealing. Weighing only 24 grams, the antenna is ground plane-independent, making it versatile for various installations. It is particularly well-suited for GIS and RTK applications where high accuracy and reliability are crucial.
The MostaTech G321M is a three-axis fiber optic gyroscope (FOG) that offers high-precision navigation and orientation measurement capabilities. This advanced sensor features a data rate of 8 kHz.
Key features of the G321M include an input range of 400° per second, a bias RMS of 1° per hour and an angular random walk of 0.025 °/√h. Additionally, it has a power consumption of 2 W and an initialization time of 1 second. The G321M is designed with a compact form factor, making it suitable for various applications where size and weight are critical factors.
It is ideal for UAVs, robotics, borehole surveys, image stabilization, gimbal stabilization and underwater vehicles.
High-Precision Lidar Designed for precision applications
The TV1 Lite and the TV1 UAV systems are designed for various precision applications, such as mapping and data collection.
The TV1 Lite features TrueNav technology, a Hesai 32-channel laser scanner and a FLIR 5MP global shutter camera with a 90° field of view. It also includes one year of TV1 Lite Annual Processing with support and maintenance.
TV1 offers customization options, allowing users to choose from 26 MP, 45 MP or 61 MP cameras and various Trajectory Correction Service options.
Flight Control System With autopilot functionality
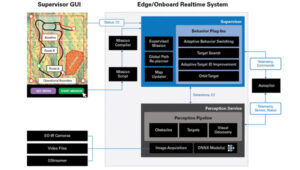
The Prism Supervisor software combines UAV autopilot flight control systems with AI-based observations processed in real time, aiming to enhance UAV operations.
The system provides a programming framework and software development kit for users to create custom mission scenarios. During flight, Prism Supervisor can adapt its autopilot functionality in real time, generating mission segments and flight plans as needed.
The software features a user-friendly graphic interface for mission planning, real-time visualization and execution. It supports Windows, Linux, macOS, iOS and Android.
Remote ID Receiver Enhances airspace awareness and UAV safety
RIDER is designed to enhance situational awareness by providing real-time detection of UAV activity in sensitive areas. It also seeks to provide a clear visibility of surrounding UAV operations to help avoid potential collisions and ensure safer flight experiences.
The device features a built-in industrial chip SIM that provides global coverage through LTE-M and NB-IoT, ensuring connectivity in various environments.
It operates effectively within a temperature range of -20 °C to +60 °C and is rated IP54 for dust and water resistance. The device complies with ASTM F3411-22A and ASD-STAN EN 4709-002 standards, making it suitable for regulatory environments.
The RIDER can detect signals from up to 5 km with its default antennas and up to 10 km when using an optional high-performance antenna. It is equipped with an internal cellular and Bluetooth antenna, along with an integrated GNSS antenna that provides precise positioning and timestamping capabilities. It supports multiple GNSS frequencies and utilizes Bluetooth and Wi-Fi technologies for Remote ID communications.
Streamlined BVLOS Operations For a variety of applications
The Sentaero 6 UAV is designed for advanced over-the-horizon operations beyond visual line of sight (OTH-BVLOS). It features built-in AI and machine learning capabilities for real-time data processing. The system can be used for surveying, mapping, inspection, asset monitoring and more.
Engineered to streamline operations, the Sentaero 6 offers more accurate and up-to-date intelligence on assets. Its onboard computer can processes data mid-flight.
Future developments will include swarm operations, enabling one human to control multiple UAVs simultaneously; fully remote operations and higher safety standards, such as a parachute for urban missions, according to Censys Technologies.
SBG Systems has significantly updated its Ellipse series sensors, incorporating the latest World Magnetic Model (WMM) to enhance accuracy and reliability in navigation applications. This upgrade is available for all Ellipse sensors, including first-generation models.
Designed for unmanned systems such as UAVs, UGVs and marine platforms, the Ellipse series comprises compact, high-precision inertial sensors. These devices feature built-in three-axis magnetometers that measure Earth’s magnetic field, crucial for accurate heading and positioning data.
Updated every five years, the WMM is a globally recognized mathematical representation of Earth’s magnetic field. The latest version, released in December 2024, ensures precise heading and positioning corrections to account for ongoing geomagnetic changes.
NDAA-Compliant UAV Now integrated with ArcGIS Flight
Esri now supports the Astro Max UAV in its ArcGIS Flight application. The Astro Max is the first Blue UAS-cleared and NDAA-compliant UAV to integrate with Esri’s platform.
The Astro Max, developed by Esri partner Freefly Systems, adheres to the security and performance standards set by the National Defense Authorization Act and the Defense Innovation Unit’s Blue UAS initiative. This industrial UAV is designed to enhance the capabilities of government and enterprise users utilizing ArcGIS Flight.
Autonomous Swarm Control Controls various autonomous platforms
The Autonomous Multi-Domain Operations Resiliency Platform for Heterogeneous Unmanned Swarms (AMORPHOUS) software features a single-user interface to operate thousands of autonomous assets simultaneously. Designed with an open architecture, this software enables the U.S. and allied militaries to control a mix of uncrewed platforms, payloads and systems.
AMORPHOUS includes an intuitive and distributed command-and-control interface to give operators the flexibility to conduct a wider array of intricate military missions. This collaborative autonomy at scale will provide warfighters with a decisive overmatch capability.
L3Harris is developing prototypes using the AMORPHOUS architecture on contracts for the U.S. Army and the Defense Innovation Unit. AMORPHOUS has demonstrated flexibility and interoperability by controlling multiple, separate assets across multiple vehicle types operating in different domains during government-managed tests.
AMORPHOUS supports decentralized decision-making, which enables individual, uncrewed assets to perform tasks autonomously and make real-time tactical decisions inside the network.
Advanced Counter-UAV Radar Multi-console radar control and display system
Cambridge Pixel has developed a radar control and display system for Weibel Scientific’s XENTA surveillance radar, which is designed for modern air defense and counter-unmanned aerial systems (C-UAS) applications.
The XENTA radar includes 3D target tracking, continuous target illumination and synthetic receiver beamforming. It is available in two configurations: the XENTA-M for short-range air defense and the XENTA-C for C-UAS operations.
The system is designed to work seamlessly with third-party command-and-control systems, enhancing operational efficiency.
Cambridge Pixel’s library of radar processing software allows users to develop a tailored radar controller specific to the XENTA radar’s requirements. Enhancements were made to existing functionalities, such as improved MIL-STD-2525 overlay graphics and support for dual-redundant operator consoles.
The XENTA radar system can detect small UAVs at distances exceeding 7 km and classify them beyond 5 km. This capability makes it suitable for various applications, including airport security, border control, critical infrastructure protection and event security.
The Pelican 2 agricultural spray UAV has an expanded 300-liter payload capacity and can cover up to 5.3 ha/hr.
It incorporates several technological enhancements designed to meet the demands of agriculture applications. The aircraft features an upgraded four-motor electric propulsion system, a wider 18-m spray swath and advanced lidar and radar systems for fully autonomous day-and-night spraying. These improvements aim to increase efficiency and precision in aerial application while reducing operational costs for farmers.
The Pelican 2’s airframe and structural components are constructed from carbon fiber composites, corrosion-resistant metallic components and 3D-printed assemblies.
Hexagon has finalized its acquisition of Septentrio NV. By integrating Septentrio’s GNSS platforms with Hexagon’s existing portfolio, the company aims to enhance access to high-accuracy and high-performance positioning technology designed for Size, Weight and Power (SWaP) efficiency.
According to Gordon Dale, President of Hexagon’s Autonomous Solutions division, the collaboration will enable the delivery of advanced solutions for autonomy and mission-critical applications across various industries.
The combined expertise of both companies is expected to accelerate the adoption of autonomous systems while addressing the needs of emerging sectors such as robotics, UAVs and other mission-critical technologies. Septentrio, headquartered in Leuven, Belgium, will maintain its existing business model of providing GNSS technology to a broad base of original equipment manufacturers.
A brand-new innovation in the world of unmanned aircraft is becoming more rare as the industry matures. However, a Denver, Colorado company has been innovating continuously since 2017, patenting a new approach to vertical take-off and landing (VTOL) for a different, ground-breaking design.
The PteroDynamics’ Transwing UAV is not only autonomous but also uses a folded wing design that enables vertical take-off and virtually seamless transition to horizontal flight — sometimes compared to the simplicity of how a bird unfolds its wings to become airborne.
Transwing UAV climbs out on another logistics mission. (Photo: Ptero) Transwing in forward flight. (Photo: Ptero)
According to the company, Its unique “transverse, folded wing design” allows an extremely fast change from vertical to horizontal flight without almost any loss of momentum. Then horizontal flight can be rapid, with four powerful electric motor-driven props providing an initial dash speed of up to 100 knots, an economic cruise of 65 knots with the two outer props neatly folded out of the slipstream, and a range of 60 nm. However, endurance is not so hot currently.
Throughout the years, Ptero has carefully protected Transwing technologies by filing many patents — four of which have been granted and 15 are pending — in 11 jurisdictions around the world.
The target applications have been shore-to-ship, ship-to-ship, and ship-to-shore automated cargo transport of essential small packages (up to 15 lb) for fleet sustainment. The U.S. Navy has now contracted to evolve the existing P4 UAV variant to a P5 design carrying 50 lb payloads. This recent development contract is anticipated to result in a fully loaded 350 lb vehicle with around 400 nm range and an enhanced endurance of up to 10 hours, using a hybrid gas/electric power plant.
The U.S. Navy has observed the operation of earlier Transwing versions during several exercises, including an October 2023 demonstration off the deck of USNS Burlington in Key West, Florida. Then again, in June 2024, off the deck of the USS Curtis Wilbur guided-missile destroyer while the ship was at sea around Hawaii. In this latest demonstration, three Transwing vehicles flew 12 autonomous flights, each carrying around 15 lb cargo, with more than 20 knots winds during takeoff and landing. Although labeled as “flying autonomously,” two Transwing aircraft were controlled by one operator. Ptero says that flights from take-off to landing were fully autonomous – so load the route and operational parameters and go – this appears to be how they were flown.
Photo: Ptero
The unique transition mechanism appears to involve cables or rods pulling each wing around a pivot, which seems to have a cog simultaneously traveling along a ramp inside the fuselage end of each wing—effectively moving both wings from a stowed to horizontal position. However, this is just a supposition, as Ptero did not provide details.
Ptero also has big plans for a P7 huge cargo Transwing — 3,600 lb loaded weight, 620 lb payload, 1,000 nm range, and 9 hours endurance.
A fascinating new UAV initiative, which has the potential to not only fulfill the U.S. Navy’s need for essential small package delivery at sea but also fill this need for other friendly navies around the world. Afterward, hopefully, the many thousands (118,928 Merchant Ships) of commercial ships plying the oceans worldwide might want essential package transport. And once the barrier to the commercial market is broken, perhaps many other long-distance transport applications could emerge.
Meanwhile, Amazon is having a few difficulties with drone deliveries in College Station, Texas. Residents have been complaining about noise from drones performing over 600 round trips daily, so Amazon has recently discontinued its drone deliveries.
Amazon MK30 drone is quieter (Photo: Amazon)
With an improved propeller design, Amazon claims its new MK30 drone is around half as noisy as before, and the company intends to resume operations when new software changes aimed at improvements to enhance safety are available. The MK30 also has twice the range and is equipped with sense and avoid capability.
The company shared that two drones collided during testing at the Amazon private testing location. Analyzing and correcting this issue has taken a while, but quieter, safer deliveries are expected to resume shortly in Phoenix, Arizona and Texas.
A new VTOL vertical to horizontal UAV transition capability leading to ship-to-shore essential package deliveries is apparently in the early stages, and another few teething troubles for Amazon package deliveries — signs that there is still lots of life in this industry.
For our March 2025 issue, Professor Washington Ochieng proposed the following question to members of our editorial advisory board: When we discuss the security of GNSS/PNT systems, we nearly always focus on interference — i.e., meaconing, intrusion, jamming or spoofing. However, GNSS/PNT systems are embedded in systems of systems that also offer many other opportunities for cyberattacks. What should we do about it?
Miguel Armor
“As a GNSS receiver manufacturer and correction service provider, cyber attacks are a risk we must consider seriously that arises from our customers’ integration of our solutions into complex systems. At the receiver level, it is important to make risk assessments to identify vulnerabilities across all components and implement a robust, multi-layered security strategy that includes physical, network and software components. At the core, our strategy incorporates cybersecurity considerations into our product/service development processes. We utilize the ASPICE framework for our engineering processes and we layer into that process the ISO21434 standard to ensure that we take steps all along the development path to consider cybersecurity. We selected this standard from the automotive industry due to the connected car use case, which is now in the front of cybersecurity development. ISO21434 covers the entire development life cycle — from system, to hardware and software, to verification and validation — in a way that many other standards do not. As a correction service provider, we ensure our data streams are secure and reliable, maintaining the highest standards of accuracy and availability. We also use ISO27001 as an IT framework for our correction network infrastructure. Continuous monitoring and iterative improvements are crucial to maintaining a secure and resilient GNSS/PNT infrastructure. It is key also to prioritize redundancy and backup systems to ensure continuity and resilience, to develop a comprehensive incident response plan that allows for rapid action in case of a breach and to conduct regular employee training to promote cybersecurity awareness across all products and platforms.” – Miguel Amor, Hexagon Positioning Intelligence
Alison Brown
“Cyberattacks are a credible threat to all existing GNSS systems and certainly need to be taken into account when considering alternative resilient PNT solutions. In fact, Goal 3 of the recently released U.S. Department of Transportation PNT Strategic Plan identifies PNT cybersecurity as a critical element of PNT resilience. The National Institute of Standards and Technology (NIST) provided a report titled Foundational PNT Profile: Applying the Cybersecurity Framework for the Responsible Use of Positioning, Navigation, and Timing (PNT) Services. This cybersecurity framework was created for both users of PNT services to manage risks when using PNT signals or data, and for operators of alternative PNT services to leverage when providing PNT signals or services. It was created by applying the NIST Cybersecurity Framework (CSF) and provides approaches for cybersecurity for PNT by continuously monitoring for attacks (e.g., denial of service, jamming), false data, and other malicious behavior within the systems and across the PNT services, using data-driven methods and solutions. This Cybersecurity Framework should be routinely adopted by both users and providers of PNT services.” – Alison Brown, NAVSYS Corp.
SparkFun Electronics has introduced its first ultra-high-precision GNSS timing product, the SparkPNT GNSS Disciplined Oscillator (GNSSDO). Designed for applications requiring sub-nanosecond timing and frequency precision, the GNSSDO is built around Septentrio’s multi-constellation, multi-frequency, L1/L2/L5-ready mosaic-T module.
The device integrates Septentrio’s mosaic-T GNSS timing receiver, Espressif’s ESP32-WROVER processor and the SiTime SiT5358 disciplined 10 MHz oscillator on a single circuit board. It is housed in a custom extruded aluminum case with machined end panels and slotted flanges, making it suitable for installation in weatherproof enclosures or server racks.
The GNSSDO offers impressive timing precision. Its time pulse accuracy is 5 ns, which improves to under 1 ns with an optional subscription to Fugro AtomiChron via L-Band. Event accuracy is less than 20 nanoseconds.
To ensure reliability and security, the Septentrio mosaic-T module provides robust performance even under challenging conditions such as GNSS jamming or spoofing. The system’s multi-constellation and multi-frequency capabilities, combined with AIM+ technology, are designed to enhance resilience. Additionally, the integration of SiTime’s Super-TCXO ensures superior clock frequency stability and accuracy during GNSS outages.
SBG Systems has upgraded its inertial navigation systems — Ekinox, Apogee and Navsight— with new GNSS receiver options designed to offer greater flexibility while maintaining high precision and reliability.
Previously, SBG Systems integrated a triple-band GNSS receiver with RTK and Fugro Marinestar capabilities into its navigation solutions. The latest update introduces three additional GNSS receiver variants, each tailored to specific regional and application needs. These include:
Marinestar: This variant supports Fugro Marinestar, delivering precise point positioning (PPP) with centimeter-level accuracy via L-band corrections without requiring a base station. It is optimized for marine applications such as hydrographic surveys and dredging.
HAS Ready / NavIC: Designed for future compatibility, this variant includes Galileo E6 support for the upcoming Galileo High Accuracy Service (HAS), offering free decimeter-level PPP corrections globally. Additionally, it supports the Indian NavIC system, making it suitable for applications in urban environments, aviation and operations in India.
Centimeter-Level Augmentation Service(CLAS): Tailored for users in Japan, this variant utilizes QZSS L6 signals to provide free PPP corrections without external services. It is ideal for land and marine navigation in Japan.
All GNSS variants integrate seamlessly with SBG Systems’ antenna portfolio and Qinertia post-processing software. Users select the appropriate GNSS variant at purchase to match their operational requirements. These enhancements aim to provide versatile solutions across diverse industries while ensuring reliable performance.
The European Union Agency for the Space Programme (EUSPA) has awarded GMV a framework contract to advance the Galileo Reference Centre (GRC), a key facility for monitoring and evaluating the performance of the Galileo satellite navigation system. Located in Noordwijk, the Netherlands, the GRC independently assesses Galileo’s operations, signal quality, and user-level service performance and compares its performance with that of other GNSS.
The upcoming GRC V2 version will introduce real-time monitoring capabilities, enhancing EUSPA’s ability to oversee GNSS services. This evolution will support additional Galileo services, including:
Signal Authentication Service (SAS): Strengthening trust in Galileo signals.
Time Dissemination Service: Enabling precise synchronization for critical infrastructure.
Search and Rescue (SAR): Improving emergency response operations.
Emergency Warning Satellite Service (EWSS): Facilitating public alerts for natural disasters and emergencies.
Key operational improvements in GRC V2 include:
Enhanced monitoring using data from multiple institutions.
Real-time processing for faster user notifications.
Seamless system upgrades without disrupting operations.
Advanced cybersecurity measures integrated into a platform-as-a-service model.
The upgraded GRC is expected to be operational by 2026 without impacting ongoing functions.
GPS World is a business-to-business magazine, and most of our readers are engineers, surveyors and other professionals specializing in geospatial technologies. In general, we do not cover consumer applications. Nevertheless, it is important to remember that, while GPS was designed and built, and is managed, by the U.S. military (from 1973 to 2020 by the U.S. Air Force, since then by the U.S. Space Force), more than 99.9% of its users are not members of the U.S. military, nor surveyors, but consumers. They benefit from GPS — and the three other GNSS, namely Russia’s GLONASS, China’s BeiDou and Europe’s Galileo — in many ways and are unaware of most of them, such as the fact that GNSS receivers provide essential timing for radio and television broadcasts, cellphone communications and financial transactions.
The vast majority of consumers access GNSS via their smartphones. We are all familiar with the myriad smartphone applications that rely on GNSS for positioning and navigation — from Google Maps and Apple Maps to Waze and social media platforms such as Instagram. Additionally, weather apps, such as the Apple Weather app, and parking apps utilize GNSS to enhance user experience and functionality. Nearly all smartphones today use at least three of the GNSS constellations — GPS, GLONASS and Galileo — and some use all four. (The use of BeiDou in the United States is a controversial topic that we will explore soon.)
For most people, smartphones have replaced such previously separate electronic devices as calculators, digital cameras and car navigators. (A freestanding GNSS-based car navigation device is still useful, however, when you travel in areas with spotty or nonexistent cell phone coverage, because it relies on maps stored on the device, so it does not require an Internet connection. That is why I still carry a nearly 20-year-old Garmin nüvi in my car.)
For a few years, there were even handheld televisions. (My 1989 Casio TV-400 LCD Pocket Color handheld VHF-UHF TV has a 4 cm x 3 cm LCD screen. It is analog, however, so it stopped working when U.S. television broadcasts switched to digital in 2009.) Now, many people watch news, shows and movies on their phones.
Nevertheless, there are still many freestanding GNSS-based devices. For example:
Handheld receivers for hikers and boaters that display your position and heading on topographic maps or nautical charts, as well as such information as elevation, speed, distance to your destination, number of GNSS satellites in view, tides, and sunset and sunrise times.
Cyclometers that show bicyclists their speed, pace and position on a map.
Fitness trackers and smartwatches that track your exercise, sleep, heart rate and biometric data.
Tracking devices that monitor the movements of people, such as children and Alzheimer’s patients, and help recover stolen vehicles and boats.
Additionally, many digital cameras have GNSS receivers that insert the location of each photo into their metadata.
Since I began working in this industry 25 years ago, I have always detested the term “GPS tracker” because it reinforces the already widely held misperception that a GPS receiver somehow “tracks” its user. As most readers of this magazine know, GPS receivers only display and/or store location data for the user, without sharing it with anyone else, let alone broadcasting it. Tracking something requires coupling a GPS receiver with a way to transmit the location data — typically, using a cellphone connection. Plus, nowadays, the word GPS should in most cases be replaced with GNSS. Therefore, I am always careful to say or write “GNSS-based devices.”
What follows highlights three very different GNSS applications in consumer devices:
Handheld receivers and smartwatches by Garmin for outdoor recreation and fitness.
GNSS-based tracking of vulnerable people.
A smartphone application from Google to monitor jamming and spoofing.
— Matteo Luccio, Editor-in-Chief
A nearly 20-year-old Garmin nüvi still provides the author navigation in areas without cellphone reception. (Photo: Matteo Luccio)
Handheld GNSS Receivers
Garmin, founded in 1989, is the 800-pound gorilla in the consumer GNSS market. The company’s annual revenue of more than $5 billion is comparable to the nearly $4 billion annual revenue of Trimble, founded in 1978, which is the 800-pound gorilla in industrial GNSS markets.
Garmin sells a vast array of handheld receivers, smartwatches and other devices for outdoor recreation and fitness, as well as GNSS receivers for general aviation and marine navigation.
In remote areas with scant or no cellphone reception, Garmin’s GNSS receivers offer users substantially more reliable satellite reception and greater positioning accuracy than smartphones. That is for two reasons. First, because a Garmin receiver can host a larger GNSS antenna than a smartphone, which contains several antennas. Second, because it is mostly dedicated to the positioning and navigation mission — unlike the many missions crammed into a smartphone.
Garmin’s multi-constellation and multi-band GNSS handheld receivers come with preloaded topographical maps optimized for outdoor activities, with terrain contours, summits, coastlines and more.
Garmin’s latest line of handheld GNSS navigators — the Montana 710i and Montana 760i — feature built-in inReach technology, which allows users to stay in touch when venturing beyond cell service using reliable satellite communication. Users can utilize two-way text messaging and location tracking via the global Iridium satellite network. In the event of an emergency, users can send an interactive SOS message to Garmin Response, an international emergency assistance coordination center that is staffed 24/7/365.
These devices are ideal for a variety of outdoor activities, including hiking, mountain biking, off-road riding and more. They are also compatible with multiple mounting options to adapt for use on ATVs, boats, cars, motorcycles, RVs and other vehicles.
Garmin Smartwatches
Garmin smartwatches have established themselves as leaders in the fitness and outdoor adventure market. Whether running, cycling, swimming or golfing, Garmin smartwatches provide users with many activity-specific features and metrics.
These watches feature advanced heart rate monitors and pulse oximeters for health monitoring. The company’s latest line of smartwatches come with a Body Battery feature that continuously analyzes combinations of the user’s heart rate, heart rate variability and movement data. The goal of this analysis is to identify meaningful physiological states and to describe the impact they have on the body’s energy levels. At a high level, this means documenting whether users are awake or asleep and when they are physically active, as well as tracking stress levels during periods of inactivity, according to Garmin.
Garmin smartwatches also feature additional sensors to improve location data. They include an altimeter sensor that helps track elevation changes and an accelerometer that detects movement. The latter is used for such tasks as step counting, sleep tracking and other activity measurements.
Garmin watches use multi-constellation (GPS, GLONASS, BeiDou and Galileo) GNSS receivers that enable accurate distance, pace and route mapping during outdoor activities, even in challenging environments.
— Jesse Khalil, Associate Editor
Tracking Family Members and Pets
The Satellai Collar features a lightweight tracker attached to a padded harness designed to avoid snags, discomfort or mobility restrictions. (Photo: Satellai)
GNSS technology enables consumers to track those most important to them – their family, friends and even their pets.
Companies such as u-blox offer devices that can be worn by the elderly and children to enable their caregivers or parents to track them. The devices help locate individuals through ›GNSS receivers (using all four GNSS constellations); Bluetooth, Wi-Fi and low power wide-area cellular communications; and cloud connectivity.
Families can monitor the movements of their children as they travel to and from school by bus by tracking those buses as they drive along their routes. Families can better time their kids’ departure to the bus stop in the morning and know when the bus has returned in the afternoon — all by viewing a live tracking function, provided by the school district, on their computer or smartphone.
Some of the newest tracking technology was on display at this year’s Consumer Electronics Show (CES) in Las Vegas in January. SATELLAI, a provider of AI-integrated pet solutions, showcased its SATELLAI Tracker and SATELLAI Collar. “The SATELLAI Tracker and the SATELLAI Collar use satellite and AI technologies to accurately relay their positions and status at all times,” said Mark Mao, founder and CEO of SATELLAI.
The lightweight tracker attaches to a padded harness that won’t snag, cause discomfort or hinder a pet’s mobility, according to the company. It features the Qualcomm MDM9205S modem, the 3GPP Rel17 5G IoT-NTN satellite communications system and the Aware platform, allowing it to use both cellular and satellite communication for continuous tracking even in remote areas without terrestrial cellular coverage. Working with the Skylo communications network ensures that the tracker works with more than 680 global networks across more than 180 countries. The SATELLAI Collar leverages a dual antenna and a multi-constellation GNSS receiver to deliver precise tracking, even in areas with low connectivity, the company adds.
Tractive, a global provider of pet GNSS and health tracking, also unveiled its latest dog tracker at CES in Las Vegas. Companies are also offering new ways to keep pets within areas chosen by their owners. According to Tractive, most virtual fences use a collar-mounted GNSS-based tracker in combination with an app or software. Users can create their preferred fence boundaries and receive notifications when pets cross them. Utilizing Mapbox’s advanced mapping platform, the SATELLAI Collar also allows users to manage these virtual boundaries, supporting overlapping and nested fences. The collar supports virtual fencing for areas up to 100,000 acres. Virtual fences are also commonly used with cattle.
— Brian Richesson, Senior Editor-in-Chief
Google Tools for Detecting Jamming & Spoofing
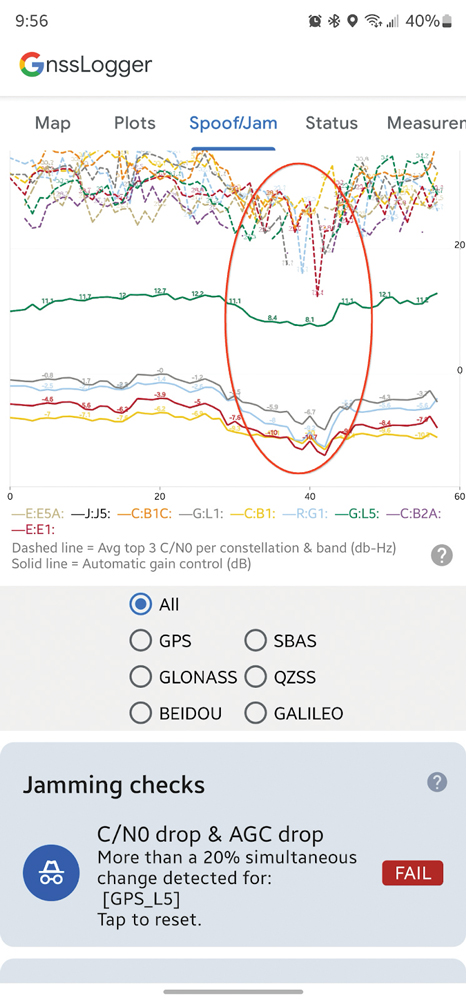
AGC and C/N0 both drop when a phone is held next to a Wi-Fi router (red oval). (Screenshot from Google)
The sharp increase in the past few years of instances of GNSS jamming and spoofing, much discussed in these pages especially with regards to civil aviation, also affects smartphones, smartwatches and other consumer devices. Google — which makes the Pixel phones as well as Android, the most used operating system, which is used by three quarters of the world’s smartphones — has been developing a tool to help detect these attacks.
It is based on the fact that the carrier-to-noise ratio (C/No) of the signal as well as the automatic gain control (AGC) of the GNSS radio in the phone can be good indicators of interference. “The AGC tends to dip when spoofing or jamming is observed,” said Mohammed Khider, Ph.D., manager and senior staff software engineer at Google. However, he pointed out, for jamming events the C/N0 value drops while for spoofing it increases.
Making use of this effect, desktop tools that log data and analyze the AGC and C/No have long made it possible to detect interference. Now, Android users can do the same thing on their phones in real time, using the spoof/jam tab in Google’s GnssLogger app. It creates a graphic of AGC and C/No for each GNSS constellation and band. Moreover, the app cross checks the GNSS signals with other independent sources of information to flag potential jamming and interference. Below the real-time plot of AGC and C/N0 are a series of additional automated jamming and spoofing checks.
This is an experimental feature, and the algorithms behind it will be further improved as research progresses, Khider pointed out. Moreover, it will not catch all jamming or spoofing. However, it will make it much easier to examine data related to these GNSS interference events in real time.
Google launched its GnssLogger app in 2020, and it has been a leading tool for the GNSS community to better understand positioning and navigation on smartphones. “It helped establish a de-facto CSV (.txt) standard for raw measurements and other data for Android devices that has been used in many other tools, including Google’s own Gnss Analysis app,” said Khider.
Last fall, in addition to the new spoof/jam screen discussed above, Google also launched GnssLogger for Wear OS, a new companion app for Android smartwatches that offers several of the key features found in the phone app, and a new measurements screen, which enables users to view GNSS raw measurements in real time.