LightSquared Prospects Dimming. Concerns by government and the private sector about GPS interference from LightSquared’s proposed wholesale LTE service accelerates. Government experts just reported that interference with GPS occurred in high portions of LightSquared’s spectrum bands and little in the lower spectrum. The National Space-Based PNT Advisory Board’s tests showed that some GPS receivers lost signal strength while others were fully disabled by LightSquared’s signal. FCC Chairman Genachowski, under fire for granting LightSquared a conditional waiver, has reiterated that he will not permit LightSquared to begin commercial service without first resolving concerns about potential interference to GPS devices.
Genachowski hit back at the GPS community in a letter to Sen. Charles Grassley, “It should be no surprise to anyone involved in the LightSquared matter that the company was planning for some time to deploy a major terrestrial network in the spectrum adjacent to GPS.” Members of the National Space-Based PNT Advisory Board have stated that they and the GPS community were not properly notified when the FCC removed the limit on the number of base stations deployed on this spectrum. And so it goes on. (See also LightSquared, FCC Rebuttals Distort Record.)
Getting Intimate. Mobile phones are the most personal computing devices. How personal? iPass conducted a study of 3,700 mobile employees at 1,000 enterprises worldwide. Sixty-one percent of these mobile workers sleep with their smartphones and 43 percent of those within arm’s reach. It gets worse. 58 percent of those that sleep with their phones at least occasionally, check it during the night. Not surprisingly, almost a third of mobile workers say their relationship with their smartphone causes friction with their partner. I’d say.
Frienemies. In a newly extended agreement, Google will continue to provide archrival Apple with map and search capabilities. This kills rampant rumors that Apple will have a home-grown mapping database ready in the near term. In March, AppleInsider discovered an Apple job listing for an iOS Maps Application Developer to “radically improve” Apple’s location-based services. Even for Apple, a mapping database will take time to develop.
App Stores Aren’t the Holy Grail. App developers whose marketing strategy starts and ends with getting onto app store “shelves” need a reality check. With more than 200,000 apps on Google’s Android Market and 350,000 on the Apple store, it is hard to stand out. According to Distimo, 20 percent of free applications and 80 percent of all paid applications have been downloaded less than 100 times in the Google Android Market, worldwide. Ninety-six applications have been downloaded more than 5 million times, with Google Maps the winner, with more than 50 million downloads in the Android Market.
Traffic Targeted. Navteq will begin delivering its traffic services in Transport Protocol Expert Group (TPEG) standard format to enable location-targeted traffic services with radius search capabilities and user authentication and session management. The format allows more targeted data to be delivered in smaller file sizes.
Mobile Advertising Flying High. Many of the location content providers are counting on monetizing with mobile advertising, and things are looking good. AdMob is receiving more than 2.7 billion mobile ad requests daily, spanning more than 80,000 mobile applications and websites. Now they are introducing ads for tablet formats. Ad Mob was purchased by Google last year for $750 million.
Snippets
Nokia is ending the confusion of its dual names by killing the Ovi brand. Ovi maps, Ovi e-mail, Ovi music, Ovi store, and other Ovi products will continue to operate under the Nokia brand name.
Industry-backed Future of Privacy Forum is launching a new ApplicationPrivacy.org website to help developers create their own privacy policies. Location privacy concerns have so far been focused on the big players like Apple and Google, but app providers have a critical role.
Firefox for Android now includes a “do not track” tool that signals all web pages, images and advertisers that the user doesn’t want to be tracked.
Taipei officials are ordering Apple and Google to offer free seven-day mobile app trials in alignment with Taiwan’s Consumer Protection Act.
Google is raking in more than 97 percent of U.S. mobile search spending. Yahoo and Microsoft’s Bing share the remainder.
Monetizing with Nothing. The Inside Virtual Goods report estimates $1.6 billion dollars was spent by game players on virtual goods last year and is predicting a 40 percent increase in 2011. There is a gender factor. MocoSpace, mobile entertainment provider, reports that although the percent of male players (53 percent) is only slightly higher than female, men account for 90 percent of all virtual goods purchased in their games. Can you lend me your sword, sir?
A claim frequently made by LightSquared spokesperson Jeff Carlisle, and recently by FCC chairman Julius Genachowski, that the GPS industry knew long ago about LightSquared’s plan for powerful terrestrial transmitters, would be a telling point — if it were true. But it is not. The verifiable fact is that the GPS industry knew about and agreed to a plan by a previous version of the company, for a different purpose, with a different business concept, and employing a completely different technological approach, one that would not have harmed GPS transmissions and disabled GPS users the way the current plan does. Calling the 2010 LightSquared plan the same as the 2003 Motient plan is running a wolf in sheep’s clothing.
The GPS industry worked cooperatively with previous incarnations of LightSquared, known variously as Motient, Mobile Satellite Ventures Subsidiary LLC, and SkyTerra, to facilitate the provision of ancillary terrestrial component (ATC) service: a terrestrial service authorized by the Federal Communications Commission (FCC) as an ancillary component of an integrated satellite offering.
[Definition of ancillary: Providing necessary support to the primary activities or operation of an organization, institution, industry, or system.]
The Record. Since at least 2003, the FCC has contemplated terrestrial operations as an ancillary supplement to a primarily satellite-based service. And since 2003, the GPS industry has been aware of this, and cooperated with it. The plan involved no foreseeable harm to the GPS signal or millions of GPS users. In fact, its very design to protect its own satellite signals also protected GPS signals from interference.
LightSquared’s predecessors — Motient, MSV, and SkyTerra, in succession — presented a series of technical proposals in limited proceedings, and the FCC accepted a series of incremental modifications of its technical rules, all against the backdrop of the fundamental requirement: that the terrestrial operations would be ancillary to and fully integrated with a primary satellite service. The GPS community evaluated changes in the technical rules in this context and did its best to cooperate in technical modifications that would apply to terrestrial operations subject to these fundamental constraints.
More to the point, those predecessor companies had to protect their own primary satellite operations from interference. The protection that their own satellite operations required was also sufficient — at that time — to protect GPS receivers. Because of these companies’ self-interest in protecting their own satellite signals in-band, the GPS industry focused its efforts on limiting out-of-band emissions from the anticipated ATC operations to GPS reception in the adjacent spectrum band, as evidenced by the agreements reached between the parties involved.
Ring in the New. The present situation is completely different. The current owners of LightSquared — entities affiliated with the New York hedge fund Harbinger Capital Partners — took over SkyTerra in March 2010. That’s when everything changed. A new senior management team, a new business plan, and a new technological implementation: 40,000 powerful terrestrial transmitters adjacent to the L1 band in which GPS operates. Nothing previously seen by the FCC or the GPS industry even hinted at this approach.
LightSquared now proposes an extensive deployment of terrestrial transmitters, operating independently of its satellite offering, which will create interference to GPS far beyond what was contemplated by prior FCC policy and applicable rules. GPS operators understood and agreed that satellite operators in the Mobile Satellite Service (MSS) band could deploy terrestrial service on an ancillary basis to complement satellite-based services in areas where satellite reception was weak. But there was never any agreement to, nor awareness of, the kind of dense and very powerful terrestrial network that LightSquared now seeks to install.
LightSquared spokesperson Carlisle paints his organization as involved in prior communication to and negotiations with the GPS community in connection with the ATC rules. This disguises an essential point. That was a different organization, with a different ownership and leadership, a different business plan, and a different technology to back it up.
Carlisle himself says so in a November, 2010 update letter to the FCC, which is when the rumbling really began.
“In the six years since LightSquared’s [initial terrestrial] application was granted, control of the company has been transferred and its business plans have evolved.”
FCC chairman Julius Genachowski picked up the ball in a recent letter replying to Senator Charles Grassley’s concerns about LightSquared interference. “It should be no surprise to anyone involved in the LightSquared matter that the company was planning for some time to deploy a major terrestrial network in the spectrum adjacent to GPS.”
If an untruth is repeated enough times in enough different places, it begins to pass itself off as the truth.
Two to Ponder. The evolution of LightSquared’s business model involves two key elements, both of them at odds with established FCC policy, not to mention GPS viability — and thus not reasonably anticipatable by anyone.
First, LightSquared’s proposed terrestrial broadband operations cannot be described as ancillary to the primary purpose for which its predecessors, Motient, MSV, and SkyTerra, received their spectrum and licenses — that is, to provide a service that was primarily a mobile satellite service.
Second, a requirement for the ATC service in the MSS band was that any terrestrial service be integrated with the satellite service. LightSquared’s new business model contemplates no meaningful integration of terrestrial service with satellite service.
The deviations from established policy and rules required to accommodate LightSquared’s new business model were not mere technicalities. They represent a fundamental change to a complex and interrelated set of rules and policies that were carefully designed to protect GPS users from interference.
On Its Head. The November 2010 Lightsquared letter to the FCC described a new business model that turns the original concept on its head. LightSquared for the first time revealed plans to build a “nationwide network of 40,000 terrestrial base stations,” and stated that “the capacity of its fully deployed terrestrial network across all base stations will be tens of thousands of times the capacity of either of [its] satellites.”
Under the only combined satellite/terrestrial service plan described in the letter, an end user would be provided with basic usage (that is, usage before additional charges apply) of onegigabyte of terrestrial wireless broadband usage but only 500 kilobytes of satellite date usage, less than what is needed to send a single email in many cases.
It appears that the purpose of Lightsquared’s satellite service is, now, to provide ancillary service in remote areas not covered by the ubiquitous primary terrestrial network, or in the event that the terrestrial network is destroyed — exactly the opposite of what the FCC authorized and the GPS industry had understood and agreed to.
In 2003, the FCC stated that: “We will authorize MSS ATC subject to conditions that ensure that the added terrestrial component remains ancillary to the principal MSS offering. We do not intend, nor will we permit, the terrestrial component to become a stand-alone service.”
LightSquared now claims, and at least one FCC commissioner wants Congress to believe, that the GPS industry should have anticipated that what was bedrock when the FCC adopted its ATC rules would become quicksand by 2011. But there is no language in prior Commission orders that might have put the GPS community on clear notice that the rules of the game were likely to be changed in such a fundamental way.
The Distortion. LightSquared has mischaracterized the GPS community’s earlier cooperation as permission to extend the technical rules, without further consideration, to the fundamentally different, new and far more threatening mode of operation now proposed by its 2010 re-incarnation.
When the FCC first authorized ATC, it made it clear that in the event that services in bands adjacent to ATC operations, like GPS, suffered harmful interference, it would be the responsibility of the ATC operator, not the GPS provider, to cure that interference. If LightSquared cannot demonstrate that it will not cause – or that it alone will ameliorate – harmful interference to GPS operations, it must not be permitted to initiate service.
A cursory examination of Carlisle’s and Genachowski’s backgrounds reveals nothing pertaining to engineering or technical knowledge. Both are lawyers. Such professional experience has proven to go far in Washington D.C., of course. That and a line of talk.
Interestingly, Carlisle served as deputy chief and then chief of the FCC’s Wireline Competition Bureau from 2001 to 2005 — the period during which the earlier, less harmful ATC agreement was reached. Carlisle managed the development of FCC policies on broadband and competitive entry into the local exchange market, and was the architect of FCC policies on bankruptcy of common carriers.
Genachowski has a long-term and reportedly close relationship with President Obama, who appointed him to the FCC chairmanship. His background as a Supreme Court law clerk has led some to speculate that he may play a strong role in determining legal strategy on FCC court cases. His official bio states that “Prior to his FCC appointment, Genachowski spent more than a decade working in the technology and media industries as an executive, investor, and board member.”
The GPS industry is amply on record as supporting the goal of ensuring that all Americans have access to broadband services, and President Obama’s goal to make more spectrum available for wireless broadband operations. However, pursuit of those goals cannot jeopardize the many critical functions performed by GPS in the national economy, security, or defense, and the overall U.S. infrastructure.
SOFIC 2011, the Special Operations Industry Conference held in Tampa, Florida, received a lot of attention this year for several reasons. First, the apprehension and death of Osama Bin Laden by the Navy SEALs was a national attention grabber. Second, as irregular warfare becomes the norm, there is a growing need for unconventional operations. As a result, the Special Operations community is seeing their budgets increase while other military activities are seeing cuts. SOFIC was extremely well attended with over a one-hour-long line for late on-site registration. Thankfullly I pre-registered early.
The conference was what one would expect with all the major defense industry players showing off some of their latest technology. Boeing was highlighting its A160 Hummingbird Unmanned Aerial Vehicle, a helicopter that can reach high altitudes, hover for long periods of time, go great distances, and operate much more quietly than current helicopters. It features a unique optimum speed rotor technology that enables the Hummingbird to adjust the RPM of the rotor blades at different altitudes and cruise speeds. One of its proposed GIS-related missions is as an ISR platform.
Lockheed Martin was demonstrating HULC, a sci-fi looking exoskeleton that was surprisingly unobtrusive and intuitive for the user. HULC (Human Universal Load Carrier) is hydraulic powered, permitting users to carry loads of up to 200 pounds for extended periods of time over all terrains. The design permits deep squats, crawls, and upper-body lifting. HULC senses what users want to do and augments their ability, strength, and endurance. See the following video which does a better job of explaining its features and capabilities. For those of you doing field GIS data collection in remote locations it may be of interest as a way of carrying heavy gear over rough terrain. Click on the image below to view the video.
Also on display was information about the new line of dirigibles for persistent surveillance and ISR data collection such as this Northrop Grumman Long Endurance Multi Intelligence Vehicle (LEMV). These airships are a hybrid blimp and ridged aircraft that have aerodynamic lift, designed to hover at high altitudes for long periods of time, up to 21 days. They can be manned or unmanned. One would think that these large slow vehicles could be vulnerable to small arms fire but the high altitude combined with a semi-ridged tough skin and low helium pressure make them almost immune to ground attack.
GIS-related exhibitors included ESRI, BAE with the new version Socket GXP for imagery analysis and exploitation, and TerraGo showing GeoPDF creation and add on tools. Although there was no direct information about geospatial participation in the Bin Laden raid, experience teaches us that GIS played a part in mapping and reconstructing the compound using aerial and ground-level imagery with GPS guidance throughout the operation. In conversations with some attendees, we guessed that the compound was reconstructed to the last detail including construction using the same types of building materials so the teams could practice how tough penetration would be and the level of protection walls would provide. But remember, even at this SOFIC conference, those who really know won’t talk and those who talk don’t really know.
One guess I’m confident about is that they practiced every possible scenario over and over again. In my personal experience during my Navy career, I was the Weapons Officer of the USS Forrest Sherman DD-931 which was part of the Iranian hostage rescue attempt in 1980. In 1980 carriers and large combatants didn’t operate in the Persian Gulf because everyone thought the waters were too shallow and the Gulf too small for carrier ops. As a result, we were the only combatant in the Persian Gulf and our job was to act as a ”horse’s twitch” attracting the attention of the Iranians in the northern Gulf while the helicopters came in from the south. The key lesson learned from the helicopter crash and failed attempt was practice, practice, practice and plan for every contingency.
At trade shows I always like to hit the small booths because that’s where the innovation shines. Several smaller vendors had items of interest to us GIS people. One example that may be of interest to GIS field operators, especially emergency response command centers, was a very portable satellite dish antenna that is a precision inflatable ball. GATR Technologies makes the four-pound antenna that can be carried in a backpack and set up in minutes to provide 1.2-meter high-bandwidth communications. The entire equipment package is less than 50 pounds and the inflated ball was surprisingly stable, even in heavy winds, according to the GATR rep.
Another high-tech GIS based technology was a robot swarm capable of performing many hazardous tasks. The science-fiction-like swarm, built by Solstice, can operate autonomously or as directed by an operator. The individual robots use GPS and IMUs to move to target locations and report back their position and data collected in the field. The location of the bots can be displayed on a GIS along with the data attributes collected. One example of their use was rapid combat airfield inspection. Dozens or more robots are sent out to inspect a proposed landing site for potholes or FOD (debris that can pose a jet engine intake hazard). Then the bots can line up and provide approach and runway illumination.
You probably have seen toy remote control helicopters sold in specialty gift stores. The Shadow and Dark Shadow are serious versions designed for surveillance and data collection. Built by BCB of the United Kingdom, the remotely piloted four rotor helos have a 2.5 lb. payload and a 70-minute flight duration on internal battery power. They can easily carry still or video cameras.
The booth that tickled me the most was a young inventor’s new design for a lowly tent stake. When I saw it I wanted to do a Homer Simpson “D’oh, why didn’t I think of that?” Eric Simonson, shown here, inventor and president of ToughStake, solved the annoying problem of tent stakes not working well in sand.
He realized that the reason stakes pull out is that the load pulls the top of a traditional stake which pulls it over then out easily. Eric came up with a design that is genius in its simplicity. He built a flat metal shovel-like stake that has a steel cable and ring running from the bottom of the stake up to the load. Since the pressure is applied to the bottom the stake it is not pulled ove
r but actually drives deeper. At his booth, Eric had a simple test box filled with dry sand so attendees could try it for themselves. I tried it and with the force of one arm I couldn’t budge it.
His stake works equally well in normal soil, dry sand or snow. I could see this stake solving a lot of field installation problems such as setting up remote antennas towers, data collection gear, tents, and protective canopies. Well done to Eric for solving such a basic problem that has plagued many military field operations with such an elegant solution.
And of course I have to end with a big “Bravo Zulu” (Navy talk for well done) to Navy SEAL Team Six.
As touchscreens get larger in vehicles, so does the thought that location-based services should be included. At the Telematics Detroit 2011 conference, while most industry observers say that some sort of advertising will soon be in every vehicle, not everyone is sold on having advertising flashed to drivers as they go by a business.
NOVI, Mich. — While the automobile may become the ultimate mobile communication device, it remains to be seen how big a role location-based services will play in this new development, said an analyst here at the Telematics Detroit 2011 conference.
“We have been looking into LBS for 10 years. The idea of driving by a store and getting a coupon is one that [consumers are] cool to. There is a big privacy issue that may backfire on companies,” said Thilo Koslowski, Gartner vice president. “In our studies, social networking still scores low for the average car consumer. The people who are buying cars are not thinking about Twitter while driving their cars — though the numbers are higher among younger drivers. Navigation is still the top feature that consumers want.”
Because of larger screens going into many vehicles, LBS seems like a natural advertising fit, but Koslowski says it will be more along traditional display-type marketing models.
Koslowsi said the biggest competition the auto industry has is the smartphone or other consumer mobile device. “We will see growth in vehicle application on the Android platform, while Apple will be leveling off. [Research in Motion] will have a lower share.”
The risk for auto manufacturers is getting too many gadgets and applications into a car. “There is a lot of risk, and hype, when manufacturers try to get too much into a vehicle. Consumers will expect certain connectivity features in the future,” Koslowski said. “Many of these innovations will occur, for the premium brands, in 2013 — that’s just around the corner in automotive years.”
Overall, Koslowski says telematics vendors and automakers should balance their priorities and opportunities. “They should seek new partnership models and strive for controlled openness [of systems], which means not complete control. The automobile will emerge as the ultimate mobile device,” he said. “There are several challenges about the connected vehicle. It is too expensive — not a must-have for consumers. Manufacturers have an unrealistic expectation.”
One of the companies wanting to get its services into a vehicle, Verizon Wireless, showcased its “Rule the Road” initiative at the conference. Rule the Road, which leverages the 4G and LTE networks, features a suite of services such as Wi-Fi hotspots, vehicle diagnostics, navigation, and traffic and safety/security.
“What you can and can’t do [in a vehicle] are important. Most navigation systems have long wait times to reroute; in the LTE world, traffic date and rerouting are immediate,” said Janet Schijns, Verizon Wireless vice president, business solutions group, who previously worked at Intel and Motorola’s enterprise group. “The car is the most powerful mobile device.”
Schijns says the car will be a great mobile communications device because owners are more loyal to it than another consumer product. “The average person used to own a computer for five years — that time continues to be reduced. They are less loyal to their mobile devices,” she said. “But people are loyal to their cars. They are the longest-life mobile device.”
Manufacturers continue to innovate and roll out products tailored to the automotive telematics market. CSR made several announcements, and exhibited, at Telematics Detroit.
One of its products, the SiRFstarIV GPS engine (GSD4e 9500), features active jammer removal technology that precludes in-band interference in cars.
“It’s the same receiver adopted by Samsung on their Galaxy mobile phones,” said Lars Boeryd, CSR director of automotive marketing.
CSR also said that Renesas Electronics Corp. adopted its location and connectivity hardware for its automotive infotainment platform. The company also is tailoring its CSR6000 Wi-Linx to automotive manufacturers to turn cars into rolling Wi-Fi hotspots, which seemed to be a big deal during sessions here.
M2M Constitutes Large Location Market
One bright spot in the whole location market is the burgeoning machine-to-machine segment. Some of the numbers are big: 4.4 million MRM units deployed by 250,000 companies, said Clem Driscoll, CJ Driscoll & Associates founder, in his annual presentation at Telematics Detroit.
Driscoll still believes that the Contran 245 Brazil law that requires every new vehicle in that country to have a GPS-enabled system will be huge for the industry. However, he concedes that the South American country has been slow to implement this law.
Trucking fleet markets, which have been in the doldrums since a 2008-2009 slump, may be heading back toward profitability because of new government regulations that require electronic onboard monitoring recorders, or EOBRs, Driscoll said. “These simple EOBRs will be in the $300-$500 range,” he said.
Kore Wireless Group, which exhibited at Telematics Detroit, said they bought Melbourne-based Mach Communications Pty Ltd., a wireless M2M network provider. “The growth in the Asia-Pacific market is going to triple. We wanted to have a solid presence in that area,” said Pete West, Kore Telematics business development manager.
Kore, which partners with Vodaphone and Iridium, is looking at such future M2M markets as insurance and health-care diagnostic monitoring, West said.
Another M2M company, Telenor Connexion, announced that it had partnered with Italy-based Octo Telematics, which specializes in telematics services and systems for the insurance and automotive market. “The company has seen aggressive growth, particularly in emerging countries in Eastern Europe. In Europe, the market is pay-as-you-drive. It’s a progressive way for building new customer segments that did not want restrictions in Europe,” said Per Lindberg, Telenor Connexion global business development executive.
Telenor Connexion, which has a long-established relationship with Volvo Trucks and many other companies, now builds its own M2M platforms.
In other conference news:
Overused conference word alert! The word “experience,” as in “driving experience,” or “consumer experience,” is way overused. Just like the 1990s’ “value-added” and ”best-of-breed” or “solution” (instead of product). A prominent wireless exec used the word “experience” more than a dozen times in her 40-minute presentation.
Telematics Detroit 2011 had a big crowd, which was not bad in a so-so economy in a remote location.
The recent furor concerning President Obama telling Israel to withdraw to its 1967 pre-war boundaries brought back some vivid memories for me. I was there in Israel in 1967, coincidentally and thus unintentionally covering the Six-Day War for Radio Free Europe, along with several other genuinely surprised correspondents and journalists. We encountered many unusual situations and not a few difficulties, which I will relate shortly.
In his Mideast statement, the President obviously misread his GPS (Geo-Political Situation) where Israel is concerned. He, along with his appointee at the Federal Communications Commission, also misreads the needs of this nation, and here I’m talking about the real GPS — the Global Positioning System.
The two scenarios — Israel in 1967 and the United States today — are connected, and that connection has to do with GPS. I urge all my readers to take prompt action, as outlined at the end of this column. Believe me, it is in your own best interest.
Navigation in 1967
One of the difficulties my fellow journalists and I encountered in 1967 was navigating around Israel in the pre-GPS era. All we had then were paper maps, of course, and after six days everything had changed, and not in small ways, either. Plus, there were mined roads and mined pathways everywhere that were not marked accurately on any map, but were marked on the ground with white flags that approximated the area of the minefield.
Think for a moment about navigating through minefields with simple paper maps as designators, and hopefully that will get your attention and give you some idea of the daunting navigation challenges we faced in 1967.
If President Obama, the Federal Communications Commission, and LightSquared have their way, we may soon find ourselves navigating without GPS and reverting to paper maps here in the United States as well. I wonder if that is really the legacy for which the Obama administration wants to be remembered: destroying the efficacy of the greatest satellite constellation ever placed in orbit. More on the FCC and LightSquared later.
Return Visits
I have returned to Israel several times over the last 44 years on various military assignments, including one to the vastness of the Negev desert, which comprises half of Israel’s southern landmass, where there are few discernable landmarks. Navigating in the Negev can be a daunting task without GPS, because believe me when I say Israel is still a country surrounded by a host of enemies. This means that a wrong turn when you are navigating close to those borders can be disastrous, even fatal; for that reason among others, GPS units are very popular in Israel. Almost everyone I met had one or more units. Handheld units are extremely popular because you can get just as lost and in as much trouble walking around and making wrong turns as you can by driving, even in the Israeli capital of Jerusalem.
Consequently there are several Israeli companies today that produce excellent GPS units, including ruggedized military units. In fact, an Israeli company makes one of the best military SAASM GPS units for warfighters manufactured today. But that is another story, for another time. For now let’s briefly travel in time back to 1967.
There I was…
For reasons probably left better to the imagination, I found myself in Israel just as the Six-Day War drew to a rapid close. At the time I was attending University Abroad in Munich, Germany, and working as a broadcaster for Radio Free Europe. Even though I had not planned it, I was able to cover the immediate aftermath of the Six-Day War on the scene for Radio Free Europe as a foreign correspondent. Great shades of Edward R. Murrow.
It was an amazing, tension-filled, historical moment that I will never forget. As I mentioned, one of those memories involves how we managed to navigate around a country that had just won a war conducted throughout its own and neighboring territories. To say that navigation in post-war Israel in 1967 was sometimes a major issue is putting it mildly.
For example, during a memorable journey from the port of Haifa to our quarters in Jerusalem and then on to our destination of Masada, near the Dead Sea, we used several different forms of transportation. We departed the busy port city in a tour bus to Jerusalem, and then continued by desert trucks toward Masada. Halfway there, we switched to horses, then to camels, and our final transports were tiny burros supposedly able to carry us up the ramps at the lofty 2,000-year-old natural stone fortress steeped in history.
Granted, all these forms of transportation were not strictly necessary, but since we were in Israel for the experience, an unforgettable experience is what transpired — although a full-blown war and its exciting but very confusing aftermath were not exactly what we had envisioned. I might add that we were constantly accompanied by bodyguards and a security force for the entire duration of our visit, which was vaguely comforting and troubling at the same time. I will never forget our first meal at Masada when we were able to converse with our bodyguards and ask the proverbial question, “What did you do during the war, Jacob?” The answer was of course “If I told you I would have to …” Well, you know the rest. Aerial view of Masada and the remains of the camp of Roman besiegers built in 73 C.E.
Considering all the forms of modern and ancient transportation we utilized during our visit, you might ask how we managed to navigate accurately, since the GPS was of course still eleven years away even from its initial launch, let alone operability.. The answer is, we navigated as accurately as possible and we did it the old-fashioned way, using the pre-1967 version of GPS: Global Navigation & Planning (GNC) maps, ancient street maps, and at times hand-drawn maps. The GPS abbreviation in 1967 stood not for Global Positioning System but for Going Places Slowly, while stopping every fifteen minutes to consult a paper map of dubious accuracy.
Today
Today, of course, the trip from Haifa to Jerusalem and then to the storied fortress of Masada can be made on a fancy European tour bus in air-conditioned comfort, and you can take a cablecar to the top of Masada. Once there, you might be able to just barely see the Dead Sea, which is much further away now than it was in 1967. Yes, unfortunately the Dead Sea is shrinking drastically, due to the high demand for water in Israel today. It is barely visible from the top of Masada’s highest vantage point. You might find it interesting to know that all the young men and women in the Israeli armed forces today take their oaths of allegiance atop Masada. The reasons are historical and make interesting reading, check it out.
Today, of course, everyone navigates accurately to all these wonderful historic venues with a handheld or vehicle-mounted GPS. And believe me, as I said, it seems that everyone in Israel has at least one. And no one in that country today, for personal and security reasons, wants to go back to the old days of navigating with paper maps, where one wrong turn can be catastrophic.
Lessons Learned
So anytime you find yourself being the least bit complacent about GPS and what it does for you, think about what it is like to live in Israel, where GPS has revolutionized the way an entire county navigates and literally serves as a lifesaving device every single day.
Here is the United States, we tend to take our technology for granted — no surprise there — but when you find yourself in some place like Israel, Iraq, or Afghanistan, and your life
literally depends on a satellite system 12,500+ miles up in space, believe me, you no longer take it for granted.
An Enabler
Always remember: GPS is a ubiquitous utility that is provided to the world free of charge, as a gift from the United States government. Countries around the globe, including Israel, use the positioning, navigation, and timing (PNT) capabilities enabled by GPS for critical national infrastructure, for military planning and execution, and yes, for everyday navigation. Plus, as I have stated many times, more than 90 percent of the 1 billion-plus people around the world who use GPS, use it for time and all the capabilities that time accurate to 1×10-E14 enables.
Will It Be There?
Please never take your GPS for granted. Part of not taking it for granted is ensuring that GPS is available and is protected from encroachment and jamming by companies like LightSquared. If LightSquared has its way, and its FCC terrestrial license is not revoked, then the company will be able to legally jam GPS and deny everyone in the United States from enjoying the innumerable activities that GPS enables around the globe.
Does that make sense? The U.S. government provides the GPS service globally, but we in the United States cannot benefit from it because a private company has convinced the FCC that being able to Google or Twitter on a cell phone in the middle of Kansas is more important than all the industries and capabilities that GPS enables, not to mention the $100 Billion in revenue that the GPS industry generates every year?
I ask again — does that make sense?
Bottom Line
Let’s hope we never have to fight another war on our homeland, because if we do and LightSquared and the FCC have their way, we will do it without GPS. We will find ourselves navigating by the seat of our pants, just as I did in Israel in 1967. Call your Congressman and complain loudly about LightSquared and the FCC. Help put an end to this insanity.
Until next time, Happy Navigating.
P.S. Our 1967 group of war correspondents included the grandson of former British Prime Minister Sir Winston Churchill, who was named after his famous grandfather. Young Winston wrote an excellent book about the war shortly afterwards. If you want to know more about the Six Day War from an eyewitness then I highly recommend The Six Day War by Randolph S. Churchill and Winston S. Churchill. As I was there, I can verify that Winston’s book is forthright and factual. Winston tells it like it was with no dithering of the facts for political correctness.
Performance of Multiplexed Binary Offset Carrier Modulations for Modernized GNSS Systems
By E. Simona Lohan, Mohammad Z. H. Bhuiyan, and Heikki Hurskainen
A candidate for modernized GNSS civil signals in the L1/E1 band was BOC(1,1), a binary-offset-carrier signal with a “split spectrum” that has negligible impact on the existing GPS signals. However, a signal with better acquisition capabilities and improved multipath performance (while still compatible with the existing GPS signals) is a multiplexed BOC modulation, MBOC(6,1,1/11). The MBOC spectrum can be achieved by following one of several different signal-construction paths with some resulting differences in how a receiver tracks the signal and its associated performance.
INNOVATION INSIGHTS by Richard Langley
IN GEOFFREY CHAUCER’S 1391 ESSAY, A Treatise on the Astrolabe (one of the earliest known instruction manuals in English), he says (with modern spelling) “Right as diverse paths lead the folk the right way to Rome.” He was talking about the use of English rather than Latin or another language to convey the same information. And we now commonly use the shortened version of this expression — all roads lead to Rome — to express the sentiment that a particular problem can be solved in different ways.
So it was with the decision by the United States and Europe to use a common, interoperable signal for the new GPS III civil service and the Galileo Open Service on the L1/E1 frequency of 1575.42 MHz. The road to “Rome” was tedious, long, and a little bumpy at times. A number of studies and a lot of rhetoric centered on how to make the new signal compatible with the legacy GPS L1 signals, the C/A-code and the P(Y)-code, as well as the modernized GPS military signal on L1, the M-code.
A similar compatibility issue had been solved when the M-code was added to the legacy GPS signals, starting with the Block IIR-M satellites. The M-code is a binary-offset-carrier (BOC) signal — a split spectrum signal — that places most of its power near the edges of the allocated GPS frequency bands, thereby having negligible impact on the legacy signals. The M-code modulation, designated BOC(10.23,5.115) and commonly abbreviated BOC(10,5), uses a subcarrier frequency of 10.23 MHz and a spreading code rate of 5.115 megachips per second to achieve the desired spectral separation. This design provides military users with an improved signal with little impact on civil users.
Similar approaches were initially proposed for the new GPS L1C and Galileo E1/L1 OS signals with a BOC(1,1) modulation initially agreed on. However, further studies showed that a signal with better acquisition capabilities and improved multipath performance (while still compatible with the existing GPS signals) was a multiplexed BOC modulation, MBOC(6,1,1/11), formed by multiplexing a wideband signal, BOC(6,1), with a narrow-band signal, BOC(1,1), in such a way that 1/11th of the power is allocated, on average, to the high frequency component. Such a signal has the added benefit that one can choose whether to make use of just the low-frequency component in, say, a simple “mass market” receiver or also use the high-frequency component for more demanding applications.
It turns out that the agreed-upon MBOC spectrum can be achieved by following one of several different signal-construction paths with some resulting differences in how a receiver tracks the signal and its associated performance. In this month’s column, we take a look at some of the options.
In July 2007, the United States and Europe announced agreement on the use of the multiplexed binary offset carrier (MBOC) modulation as a common baseline for Galileo Open Service signals in the E1 band and GPS L1C signals in the L1 band. According to the most recent Galileo Signal-In-Space Interface Control Document (SIS-ICD; see Further Reading), the MBOC power spectral density (PSD) has been fixed to
(1)
where GBOC(m,n)(f) is the normalized PSD of a BOC(m,n)-modulated pseudorandom noise (PRN) code with sine phasing. The indices m and n are related to the sub-carrier frequency, fsc, and the chip frequency, fc, via m = fsc/frefand n = fc/fref, respectively; fref = 1.023 MHz is the reference C/A-code frequency, and NB = 2fsc/fc = 2m/n is the BOC modulation index.
The MBOC PSD is obtained by taking the data and pilot channels together. The data and pilot channels can use, independently, one of the following modulations: composite binary offset carrier (CBOC) or time-multiplexed binary offset carrier (TMBOC) modulations. CBOC and TMBOC, in turn, have several variants. Since the data and pilot channels are typically processed independently, it is important to understand the differences between various CBOC and TMBOC modulations and this is the primary goal of this article. There are several possible ways to achieve a PSD as given in Equation (1) and they are based on combining the data and pilot channels in the Galileo and modernized GPS systems. The main modulation types for pilot or data channels that can be used in order to achieve (when combined) the MBOC PSD can be summarized as follows:
1. The CBOC method: CBOC is formed via a weighted sum or difference of BOC(1,1)- and BOC(6,1)-modulated code symbols (where the BOC(1,1) part is passed through a delay block in order to match the rate of the BOC(6,1) part) as defined in Equation (2):
(2)
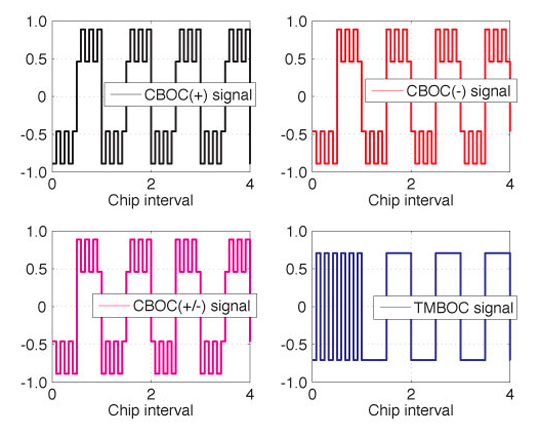
where sBOC(1,1),h is the up-sampled BOC(1,1)-modulated code (that is, the code provided at the same rate as the sBOC(6,1) signal), sBOC(6,1) is the BOC(6,1)-modulated code, and w1 and w2 are amplitude weighting factors, chosen in such a way to match (as closely as possible, when both data and pilot channels are considered) the PSD of Equation (1), with w12 + w22 = 1. When the two right-hand terms are added in Equation (2), CBOC(+) is formed; when subtracted, CBOC(–) is formed. A third alternative for CBOC implementation is to use the CBOC(+/–) approach, where the odd-numbered chips are CBOC(+)-modulated and the even chips are CBOC(–)-modulated. The current Galileo SIS-ICD uses a CBOC(+) variant (also called CBOC in-phase) for the E1-B data channel and a CBOC(–) variant (also called CBOC anti-phase) for the E1-C data-less (or pilot) channel.
2. The time-multiplexed BOC (TMBOC) method: the whole signal is divided into blocks of N code symbols with M (<N) code symbols sine-BOC(1,1)-modulated, while N-M code symbols are sine-BOC(6,1)-modulated. The typical shorthand notation for this variety of TMBOC would be TMBOC(6,1,(N-M)/N), referring to the sine-BOC(6,1) component of the signal. This time-domain division may be applied for both pilot and data channels, individually. The choice of the N and M parameter values depends on the desired power percentage of the pilot channel with respect to the data channel. We have shown in earlier work (see Further Reading) that, from the point of view of the MBOC autocorrelation function, TMBOC and CBOC(+) implementations are equivalent, as long as the weights are related to the N and M values using w1 = √(M/N) and w2 = √((N-M)/N). Various TMBOC implementations exist according to the values chosen for N and M and according to whether the BOC(1,1) code symbols are in phase or out of phase with the BOC(6,1) code symbols. For example, for a 50-percent/50-percent power split between the pilot and data channels using in-phase code symbols, M = 9 and N = 11 (that is, TMBOC(6,1,2/11) is used), while for a 75-percent/25-percent power split between the pilot and data channels (again, using in-phase code symbols), M = 29 and N = 33 (that is, TMBOC(6,1,4/33) is used).
A major difference between CBOC and TMBOC signals is that CBOC signals have four different levels (as a weighted sum or difference of two sub-carriers), while TMBOC signals have only two levels. The impact of these differences in the tracking stage of a receiver has been analyzed, for example, by a team of researchers led by Olivier Julien (see Further Reading). They showed that an optimal CBOC receiver should generate a local replica that also has four levels, resulting in a replica encoded on more than just one bit. This complicates the CBOC receiver architecture, compared to TMBOC 1-bit receiver architectures. In terms of performance, a CBOC(–) receiver proved to have the same delay-tracking variance performance as a TMBOC(6,1,4/33) receiver and both slightly outperform a TMBOC(6,1,1/11) receiver. And considering multipath error performance, a TMBOC(6,1,4/33) receiver was shown to give the best performance, followed very closely by a CBOC(–) receiver. Our research extends this earlier study.
Examples of CBOC and TMBOC waveforms are shown in Figure 1. Here, w1 = (10/11) and the TMBOC waveform has every first chip BOC(6,1)-modulated (inside blocks of 11 chips). In the figure, only the first five modulated chips are shown for clarity.
Figure 1. Example of MBOC waveforms for a PRN sequence [1, -1, 1, -1, -1].Our article addresses the following issues: First, we analyze the spectral differences between various CBOC and TMBOC modulations in terms of their effect on receiver performance. Secondly, we look at the navigation data error probability, the tracking error variance in the presence of noise, and the robustness of the signal in the presence of multipath and bandwidth limitations of MBOC variants, by taking into account the spectral differences between the different variants. Thirdly, we justify the choice of CBOC(+) for data channels and CBOC(–) for pilot channels in the Galileo SIS-ICD in terms of these receiver performance criteria.
Spectral Differences of CBOC/TMBOC Modulations
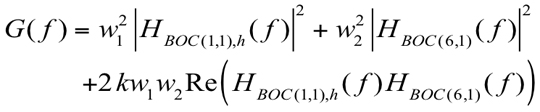
The spectral differences refer to the differences in the PSD of various waveforms. We recall that the PSD is the Fourier transform of the CBOC/TMBOC autocorrelation function. CBOC/TMBOC signals are formed from the convolution of PRN code waveforms, CBOC/TMBOC modulation waveforms, and navigation data (when present). If the same PRN code is used for the BOC(1,1) and BOC(6,1) modulations, some cross-correlation terms appear in the autocorrelation function, which will also appear in the frequency spectrum. Indeed, following the model, after straightforward derivations, we obtain the generic CBOC/TMBOC PSD as:
(3)
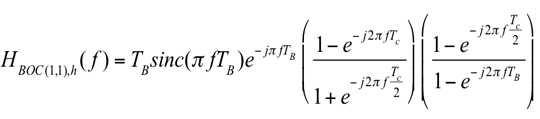
where HBOC(1,1),h(f) and HBOC(6,1)(f) are the following Fourier transforms of the modulation waveforms:
(4)
(5)
Above, TB = TC/12 is the BOC(6,1) sub-interval and sinc(x) = sin(x)/x. The formula given in Equation (3) covers all CBOC/TMBOC cases: k = +1 for CBOC(+) and TMBOC, k = –1 for CBOC(–), and k = 0 for CBOC(+/–), respectively. Equation (3) characterizes either the pilot channel’s PSD or the data channel’s PSD. In order to achieve the PSD of Equation (1), data and pilot channels should be combined. For example, if k = 0, any combination of data and pilot channels is possible in order to attain the PSD. If k ≠ 0, then the data channel should use in-phase combining (k = +1) and the pilot channel should use anti-phase combining (k = –1) or vice versa.
Now, if we take as a reference the PSD of CBOC(+/–) (which, incidentally, is also the PSD of Equation (1)), the spectral differences between the other CBOC/TMBOC modulations and CBOC(+/–) are quantized by the following equation:
(6)
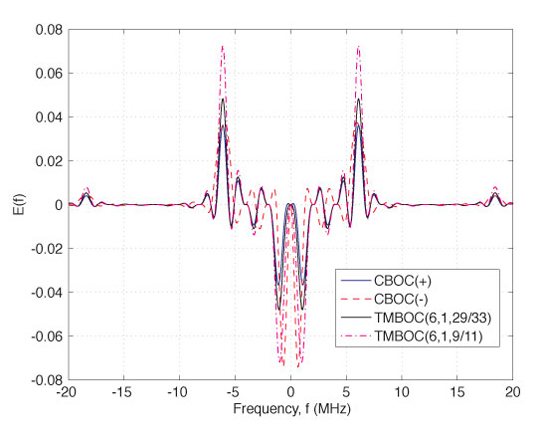
Examples of spectral difference between CBOC(+/–) and each of the following modulations: CBOC(–), CBOC(+), and TMBOC(6,1,(N-M)/N) and each of the following modulations: CBOC(–), CBOC(+), and TMBOC(6,1,(N-M)/N), respectively, are shown in Figure 2. Clearly, these differences are very small.
Figure 2. Examples of PSD spectral differences (linear scale) between various CBOC/TMBOC implementations and CBOC(+/-) assuming an MBOC receiver.
Impact on System Performance
As mentioned before, pilot and data channels typically use different CBOC/TMBOC modulations, in order to achieve an overall PSD as described by Equation (1). Now, based on the derivations we have presented so far, the following questions can be addressed: Which are the most suitable modulations (among the four discussed here; namely, CBOC(+), CBOC(–), CBOC(+/–), and TMBOC) to be used for a pilot channel and for a data channel, respectively; and how will the differences in the PSDs affect the error probability of the decoded signal and the tracking performance of each channel?
Uncoded Error Probability and Fractional Out-of-Band Energy. Data and pilot channels are usually processed independently and then combined (for example, non-coherently) in order to perform the line-of-sight (LOS) signal delay estimation and the navigation data detection. Since different CBOC or TMBOC modulations can be used for the data and pilot channels, one question to be addressed here is what is the most suitable modulation type. Additionally, the carrier-to-noise-density ratio (C/N0) deterioration when another modulation type is employed is also important. These two issues are addressed in this section.
One important spectral parameter that allows us to answer the question about error probability in the decoded data is the so-called fractional out-of-band energy (FOBE), which tells us about the fraction of the signal power remaining outside a certain double-sided bandwidth, Bw. FOBE is related to the power containment factor, used by some authors, via (1 – FOBE(Bw)). Clearly, FOBE depends on the signal modulation type. The higher FOBE is, the greater the deterioration of the signal energy we have after the receiver bandwidth limiting filters, and thus the higher error probability of the decoded signal we have. From the data-channel point of view, correctly decoding the navigation data is very important and therefore, low FOBE is the most important characteris
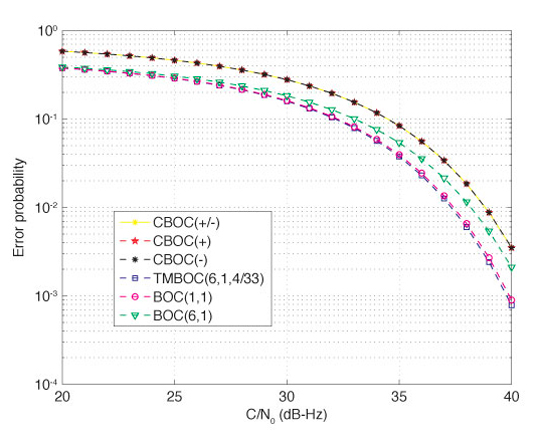
tic when choosing the modulation type. The bit error probability in decoding a binary signal, such as a BOC or MBOC signal, can be computed by taking into account the signal energy deterioration due to filtering. Using the basic formula for computing the bit error probability in decoding a 2-level signal (in the cases of BOC or TMBOC modulation) or a 4-level signal (in the case of CBOC modulation), we can compare the performance of various TMBOC and CBOC modulations in terms of error probability of the decoded data bits, as shown in Figure 3. Clearly, the error probability criterion is more important for a data channel than for a pilot channel. Sine-BOC(1,1) and BOC(6,1) modulations are included in the comparison of Figure 3 as benchmarks. A double-sided bandwidth of 24.552 MHz was considered here, following the choice in the Galileo SIS-ICD.
Figure 3. Detection error probability for CBOC/TMBOC-modulated signals with a 24.552 MHz double-sided bandwidth.
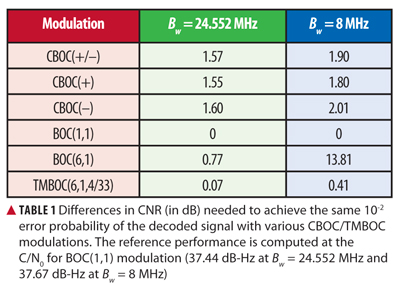
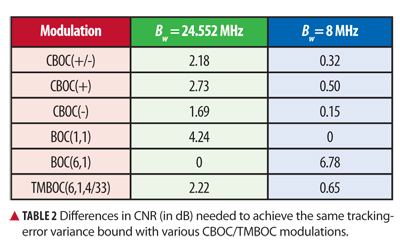
As seen in Figure 3, in terms of the error probability of the decoded signal, BOC(1,1) modulation gives the best results, followed closely by TMBOC(6,1,4/33). In order to achieve an error probability of 10-2, the CNR differences shown in Table 1 are needed for the different modulation types. From Table 1, it can be seen that, among CBOC modulations, the CBOC(+) modulation is the best option from the point of view of decoding the data, and, therefore, it makes it a suitable option for data channels, as chosen in the Galileo SIS-ICD. We remark that the huge CNR gap for BOC(6,1) at Bw = 8 MHz is due to the fact that the power containment of a BOC(6,1) signal is very poor at such a low bandwidth.
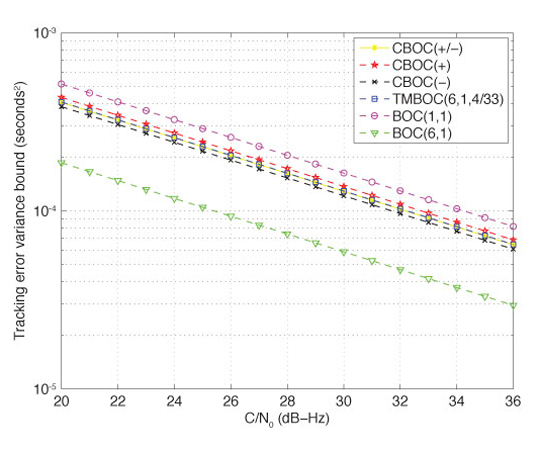
Gabor Bandwidth and Tracking Error Variance. Another important spectral parameter of interest in this analysis is the root-mean-square (RMS) or Gabor bandwidth. A larger RMS or Gabor bandwidth permits a higher accuracy against thermal noise and the tracking accuracy is approximately inversely proportional to the RMS bandwidth. The code-tracking error variance is an important parameter when trying to achieve accurate location estimates. Indeed, a Cramér-Rao lower bound (CRLB) on the tracking error variance has been derived by other researchers. Following the derivation for CRLB on the tracking error variance, we can also compare the performance of various CBOC and TMBOC modulations, as presented in Figure 4. Clearly, this criterion is more important for a pilot channel than for a data channel. A double-sided receiver bandwidth of 24.552 MHz was considered here.
Figure 4. Cramér-Rao lower bound on tracking error variance (in seconds2) for CBOC/TMBOC-modulated signals with a 24.552 MHz double-sided bandwidth.
In terms of the tracking error variance bound, which linearly decreases with the CNR (on a dB scale), the CNR differences between various modulations are shown in TablE 2 for a 4-Hz tracking-loop bandwidth. Clearly, from Table 2, CBOC modulations are better in terms of tracking error variance than TMBOC modulation, and, among the CBOC variants, CBOC(–) has the best performance. This justifies the fact that the Galileo SIS-ICD has chosen the CBOC(–) as the best option for pilot channels. We can also see in Table 2 that the bandwidth limitation has an important effect on the tracking error bounds, as expected. At low receiver bandwidth (such as 8 MHz), the differences between various modulations are rather small, while at high or infinite bandwidths, BOC(6,1) modulation is by far the best option, followed by CBOC(–) with a 1.69 dB gap in CNR (that is, CBOC(–) requires an additional 1.69 dB in order to achieve the same tracking error performance as BOC(6,1)).
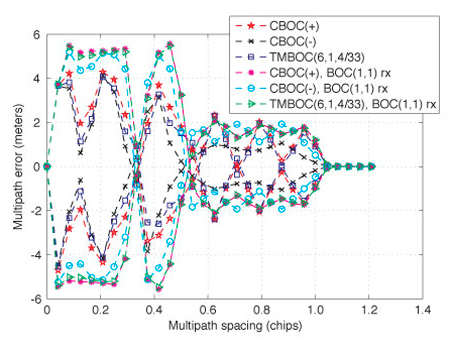
Multipath Error Envelope. The typical procedure for evaluating the performance of a multipath-mitigation technique is via the multipath error envelope (MEE). The MEE curves are obtained for two extreme phase variations of a multipath signal with respect to the LOS component while varying the multipath (that is, second path) delays from 0 to 1.2 chips at maximum, since the multipath errors become less significant after that. The upper multipath error envelope can be obtained when the paths are in-phase (that is, 0° phase difference) and the lower multipath error envelope when the paths are out-of-phase (that is, 180° phase difference). In MEE analysis, several simplifying assumptions are usually made in order to distinguish the performance degradation caused by the multipath only. Such assumptions include zero additive white Gaussian noise, ideal infinite-length PRN codes, zero residual Doppler shift, and zero initial code-delay error.
The MEE curves are generated here for different variants of MBOC implementation. The multipath performance of these MBOC variants with a BOC(1,1)-modulated reference receiver is also presented. In the MEE generation, the second path amplitude was fixed at 3 dB lower than the LOS component. The MEE curves were generated for a 24.552 MHz double-sided bandwidth. The narrow early-minus-late (nEML) correlator with an early-late correlator spacing of 0.0833 chips was used here as a tool for evaluating the performance of the different MBOC variants in the presence of multipath. The nEML is based on the idea of narrowing the spacing between the early and late correlator pair, where the choice of correlator spacing depends on the receiver’s available front-end bandwidth along with the associated sampling frequency.
MEE curves are shown for all of the examined MBOC variants in Figure 5. It can be observed from the figure that CBOC(–) has the best multipath mitigation performance followed by the TMBOC(6,1,4/33) and CBOC(+) variants. A similar conclusion can be drawn when a BOC(1,1) reference receiver is used instead of the respective MBOC reference receiver. However, from Figure 5, it is obvious that there is a moderate performance degradation when a BOC(1,1) reference receiver is used instead of the respective MBOC version, as expected intuitively.
Figure 5. Multipath error envelope curves for a narrow early-minus-late correlator with a 24.552 MHz double-sided bandwidth.
Simulation Results in Multipath Fading Channel
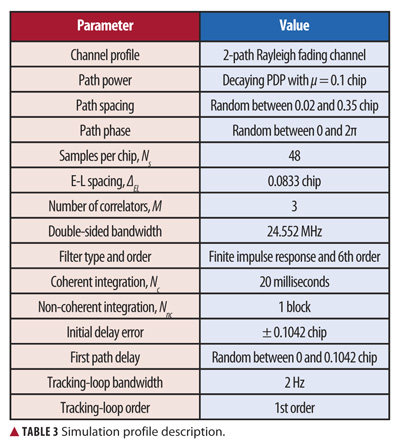
Simulations have been carried out in closely spaced multipath scenarios for different MBOC variants with a finite front-end bandwidth. The simulation profile is summarized in Table 3. A Rayleigh fading channel model is used in the simulation, where the number of channel paths is fixed to two. The successive path separation is random between 0.02 and 0.35 chips. The channel paths are assumed to obey a decaying power delay profile (PDP).
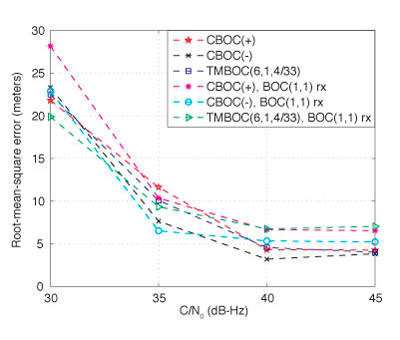
The received signal duration is 0.8 seconds for each particular C/N0 level. The tracking errors are computed after each NcNnc-milliseconds interval (in this case, NcNnc = 20 milliseconds). In the final statistics, the first 600 milliseconds are ignored in order to remove the initial error bias that may come from the delay difference between the received signal and the locally generated reference code. Therefore, for the above configuration, the left-over tracking errors after 600 milliseconds are mostly due to the effect of multipath only. We ran the simulations for 1,000 statistical points, for each C/N0 b> level. The RMS error (RMSE) of the delay estimates can be plotted in meters, by using the relationship RMSEm = RMSEchips•c•Tc, where c is the speed of light, Tc is the chip duration, and RMSEchips is the RMSE in chips. An RMSE versus C/N0 plot for the given multipath channel profile is shown in Figure 6.
As seen in the figure, the CBOC(–) reference receiver has the best multipath mitigation performance under a good
C/N0 (that is, 40 dB-Hz and higher) followed by the other two MBOC variants (CBOC(+) and TMBOC(6,1,4/33)), which exhibit almost similar performance. A similar conclusion can be drawn for the BOC(1,1) reference receiver, where the CBOC(–)-modulated transmitted signal with BOC(1,1) reference receiver showed the best multipath mitigation performance among all three of the studied MBOC variants. In Figure 6, we observe that the small performance deterioration caused by use of a BOC(1,1) reference receiver is visible only under good C/N0 conditions (that is, 40 dB-Hz and higher).
Figure 6. Root-mean-square error versus carrier-to-noise-density ratio for different MBOC variants in a two-path fading channel with 24.552 MHz double-sided bandwidth.
Conclusions
This article discusses the spectral differences between CBOC and TMBOC modulations and their impact on system performance. The exact frequency-domain form of the PSD for CBOC and TMBOC waveforms has been shown and the impact on tracking error variance bounds and on the error probability of the demodulated signal has been discussed. In addition, the multipath mitigation performances of different MBOC variants were presented in terms of RMSE and multipath error envelopes. It was shown that the CBOC(–) variant is the best variant in terms of multipath mitigation and tracking error variance, while TMBOC behaves better than CBOC in terms of error probability of the demodulated data. We also showed that the spectral differences and the differences between CBOC and TMBOC variants in terms of the two considered performance criteria are rather small, especially when the receiver bandwidth is not very high, and, therefore, several variants of MBOC can indeed be used for design and research purposes.
Acknowledgments
The research leading to the results presented in this article received funding from the European Union’s Seventh Framework Programme (FP7/2007-2013) under grant agreement number 227890 (the Galileo-Ready Advanced Mass Market Receiver–GRAMMAR–project). This research work has also been supported by the Academy of Finland and by the Tampere Doctoral Programme in Information Science and Engineering. Particular thanks are also addressed to Stephan Sand from the German Aerospace Center (DLR), Institute of Communications and Navigation, for his useful comments.
Elena Simona Lohan has been an adjunct professor in the Department of Communications Engineering at Tampere University of Technology (TUT) in Hervanta, Finland, since 2007. She obtained her Ph.D. degree in wireless communications from TUT. She also graduated with an M.Sc. in electrical engineering from “Politehnica” University of Bucharest, and with a diplôme d’études approfondies in econometrics from Ecole Polytechnique, Paris. Lohan is currently leading the research activities in signal processing for wireless communications in the Department of Communications Engineering at TUT.
Mohammad Zahidul H. Bhuiyan is a researcher in the Department of Communications Engineering at TUT. His main research areas are multipath mitigation and software receiver design for satellite-based positioning applications.
Heikki Hurskainen received an M.Sc. degree in electrical engineering and a doctoral degree in computing and electrical engineering from TUT in 2005 and 2009, respectively. Currently, Hurskainen is a senior research scientist in TUT’s Department of Computer Systems where he works on satellite navigation research projects.
Navstar GPS Space Segment/User Segment L1C Interfaces, Rev. A, Interface Specification, IS-GPS-800A, prepared by Science Applications International Corporation, El Segundo, California for the Global Positioning System Wing, Systems Engineering and Integration, Los Angeles Air Force Base, California, June 2010.
• Binary Offset Carrier Modulation
“Low Complexity Unambiguous Acquisition Methods for BOC-modulated CDMA Signals” by E.S. Lohan, A. Burian, and M. Renfors in International Journal of Satellite Communications and Networking, Vol. 26, No. 6, 2008, pp. 503–522, doi: 10.1002/sat.922.
“Binary-Offset-Carrier Modulation Techniques with Applications in Satellite Navigation Systems” by E.S. Lohan, A. Lakhzouri, and M. Renfors in Wireless Communications and Mobile Computing, Vol. 7, No. 6, 2007, pp. 767–779, doi: 10.1002/wcm.407.
“Overview of the GPS M Code Signal” by B.C. Barker, J.W. Betz, J.E. Clark, J.T. Correia, J.T. Gillis, S. Lazar, K.A. Rehborn, and J.R. Straton, III, in Proceedings of 2000: Navigating into the New Millennium, the 2000 National Technical Meeting of The Institute of Navigation, Anaheim, California, January 26–28, 2000, pp. 542–549.
“The Offset Carrier Modulation for GPS Modernization” by J.W. Betz, in Proceedings of Vision 2010: Present and Future, the 1999 National Technical Meeting of The Institute of Navigation and 19th Biennial Guidance Test Symposium, San Diego, California, January 25–27, 1999, pp. 639-648.
• Multiplexed Binary Offset Carrier Modulation Implementations and Comparisons
“Future Wave: L1C Signal Performance and Receiver Design” by T.A. Stansell, K.W. Hudnut, and R.G. Keegan in GPS World, Vol. 22, No. 4, April 2011, pp. 30–36,41.
“Analytical Performance of CBOC-modulated Galileo E1 Signal Using Sine BOC(1,1) Receiver for Mass-market Applications” by E.S. Lohan, in Proceedings of PLANS 2010, IEEE/ION Position Location and Navigation Symposium, Indian Wells, California, May 4–6, 2010, pp. 245–253, doi: 10.1109/PLANS.2010.5507207.
“MBOC and BOC(1,1) Performance Comparison” by N. Hoult, L.E. Aguado, and P. Xia in The Journal of Navigation, Vol. 61, No. 4, October 2008, pp. 613–627, doi: 10.1017/S0373463308004918.
“The MBOC Modulation: A Final Touch for the Galileo Frequency and Signal Plan” by J.A. Avila-Rodriguez, G.W. Hein, S. Wallner, J.L. Issler, L. Ries, L. Lestarquit, A. De Latour, J. Godet, F. Bastide, T. Pratt, and J. Owen in Inside GNSS, Vol. 2, No. 6, Se
ptember-October 2007, pp. 43–58.
“Two for One: Tracking Galileo CBOC Signal with TMBOC” by O. Julien, C. Macabiau, J.L. Issler, and L. Ries in Inside GNSS, Vol. 2, No. 3, Spring 2007, pp. 50–57.
“MBOC: The New Optimized Spreading Modulation Recommended for Galileo L1 OS and GPS L1C” by G.W. Hein, J.A. Avila-Rodriguez, S. Wallner, J.W. Betz, C.J. Hegarty, J.J. Rushanan, A.L. Kraay, A.R. Pratt, S. Lenahan, J. Owen, J.L. Issler, and T.A. Stansell in Inside GNSS, Vol. 1, No. 4, May-June 2006, pp. 57–65.
• Gabor Bandwidth and Cramér-Rao Bound
Spread Spectrum Systems for GNSS and Wireless Communications by J.K. Holmes, published by Artech House, Inc., Norwood, Massachusetts, 2007.
“A Family of Split Spectrum GPS Civil Signals” by J.J. Spilker, Jr., E.H. Martin, and B.W. Parkinson, in Proceedings of ION GPS-98, the 11th International Technical Meeting of the Satellite Division of The Institute of Navigation, Nashville, Tennessee, September 15–18, 1998, pp. 1905–1914.
• Narrow Early-Minus-Late Correlation
“Extended Theory of Early-Late Code Tracking for a Bandlimited GPS Receiver” by J.W. Betz and K.R. Kolodziejski in Navigation: Journal of the Institute of Navigation, Vol. 47, No. 3, 2000, pp. 211–226.
The recent broadcast of the first CDMA signal from the new GLONASS-K satellite culminates a long series of events that began in 1989. A key participant gives a first-hand account of the history of many meetings, formal and informal, that created true interoperability between the two major satellite systems, giving users a modern GNSS in action.
October 18, 1989, the Queen Elizabeth Auditorium in London, around 8:30 am. Unknown to me, two 60-minute periods were about to imprint themselves indelibly on my memory.
I walked up the stairs to the exhibition booth of my company, Ashtech, at The Royal Institute of Navigation conference. My good friend, the late Ann Beatty, met me and asked, “Any news from home?”
I thought it was just a casual customary question, and replied: “Thanks, all OK.” She had a strange look on her face. She continued: “Are all your family really OK?” I replied again: “Thanks, all good.” She then realized that I had no clue about the cataclysmic event that had hit the San Francisco Bay area. She abruptly said, “Don’t you know? The big one came! The big earthquake hit San Francisco!”
Californians know the rumors that when The Big One comes, Nevada will have ocean frontage. Now she was telling me that The Big One came! I rushed to the phone, and the recorded AT&T message said, “All lines to your area are out of service.” It took me another hour to find out that this was not yet The Big One, and that my family was safe. I will never forget these 60 minutes of my life. Never!
Nor will I ever forget the events of the next 60 minutes.
After the stress had settled a bit, a delegation from the Russian Space Agency visited our booth. First they expressed their sympathy regarding the earthquake. Then we discussed GPS technology and its similarities with GLONASS. Both systems were fairly new then, although GPS had started first, with a Block I launch in 1978, followed by GLONASS with a launch in 1982. At the time we met in London, GPS was flying 12 satellites, and GLONASS also had 12 in orbit.
The Russian delegation visited all GPS manufacturers’ booths in the exhibition hall and then gathered in the coffee area for their private discussions. A few hours before the conference closed, they returned to our booth and said, “We want to combine GPS and GLONASS, and you are our first choice.” Simply put, I was fascinated and excited.
After working out visa and travel details, four months later I arrived in Moscow in the cold days of February 1990. It was still the Soviet Union.
I had grown up in Iran where the U.S.S.R. was our neighbor to the north. Remembering the global political landscape of my childhood days, I felt both fascination and fear as my airplane landed at Moscow airport.
Upon meeting the people who greeted me at the airport, my fears disappeared, and my fascination grew stronger.
Our first formal meeting took place in the Institute of Space Device Engineering (ISDE), a division of the Russian Space Agency that was responsible for the GLONASS program. The opening photo shows me with the late Dr. Nikolay Yemelianovich Ivanov, director of the GLONASS program, at that first meeting.
I want to focus a bit on the GLONASS team and applaud them for their efforts. What makes the GLONASS team special is that they worked under much harder political and financial conditions than the GPS or Galileo teams. But still they were able to make the project successful. The Soviet Union and later Russia went through huge political, economic, social, and geographical revolutions, but the GLONASS team managed to keep the satellite navigation program alive and successful.
Galileo’s management, while enjoying much more stability and financial luxury, can certainly appreciate and understand the significance of what the GLONASS team accomplished. Galileo also benefitted from the European integration of 27 countries, while the Soviet Union disintegrated into 15 separate nations.
Despite all their heroic work, individuals on the GLONASS team have received almost no international recognition. At home they went unnoticed, due to their political situations. For example, the highest international recognition that Dr. Ivanov received was that he became a member of the GPS World Advisory Board, which I facilitated. In this article, I want to salute some members that I know and at least keep their names and photos recorded in the GPS World archives.
In the first meeting, everyone recognized and emphasized the great potential of combining GPS and GLONASS for a variety of applications. I became more assured of the deep desires of my hosts to make this happen. They had prepared detailed charts and plans, especially for high-precision applications. They also gave me the GLONASS Interface Control Document (ICD) for the first time.
We signed a cooperation protocol and agreed to explore technical details in our next meeting, which occurred a few months later. There I began to know Dr. Stanislav “Stas” Ulianovich Sila-Navitsky, at that time the chief scientist of Dr. Ivanov’s team. Later he became my vice president in three companies that I founded. He also became my best friend of 19 years, before he passed away on May 7, 2010.
We had several meetings in Moscow and one in Paris in the headquarters of our partner SAGEM.
I have wonderful memories of all the meetings. One meeting in Paris included General Leonid Ivanovich Gusev, the head of ISDE. One evening Stas called my hotel room and asked me to cancel our dinner at a famous French restaurant and instead join them for a “real dinner.” Apparently General Gusev was tired of French food! The real dinner took place in the General’s hotel room, and the menu consisted of dark Russian bread, Russian kielbasa sausage, Russian seledka herring, and an abundance of Russian vodka.
Our first announcement of combining GPS and GLONASS was published in GPS World magazine, in only its second issue, March/April 1990. That year we had a poster banner in our Institute of Navigation exhibition, showing the American flag and the Soviet flag (hammer and sickle) next to each other. My very good friend, Colonel Gaylord Green, the second director of the GPS Joint Program Office, refused to have his picture taken with me in front of that banner. Instead, we stood over to another side of the booth for his photo.
A few months after the Paris meeting, the political process known as perestroika began and caused the Soviet Union to end. Life became extremely difficult for Russians.
I called Stas to discuss the situation. We concluded that we had no choice but to continue the plan on our own if we wanted to combine GPS and GLONASS. I went back to Moscow several times, and in February 1992 officially opened the Moscow office of Ashtech. This office is still operational in Moscow with about 10 percent of the original team. It is now in the process of being purchased by Trimble Navigation. What a turn of events!
In 1996 we introduced the first combined GPS and GLONASS receiver; the product announcement appeared in GPS World, July 1996
Back home in the United States, the situation was different. Supporting GLONASS was an unpatriotic act. The most prominent figures of GPS teased me for wasting my time with GLONASS. The news favored their arguments: the Russian economy was going downhill. In September 1998, the Russian ruble collapsed more than 300 percent within a week. Banks closed. Even Coca Cola was not able to pay its employees in Russia because of bank closures. Many western companies left Russia. During that period, I intentionally stayed longer times in Moscow and managed to pay our employees without a day of delay. Furthermore, a more than three-fold rate change in favor of the dollar made our employees relatively rich, because their salaries were based on the U.S. dollar.
I remained confident that GLONASS would succeed because I had seen the enthusiasm and dedication of GLONASS management and engineers.
My Ashtech partners wanted to take the company public to recoup their investments. They thought Wall Street would negatively view GLONASS and the Russian connection. So my aspiration did not match theirs, and I started Javad Positioning System (JPS) in 1996. About 90 percent of the staff engineers followed me to JPS.
One of John Scully’s vice presidents did to Ashtech what Scully did to Apple. Meanwhile JPS became very successful, as Apple did when Steve Jobs returned.
Subsequent to another event and termination of some obligations and commitments, I started JAVAD GNSS in June 2007. Almost all of the key people followed me again. Our current team has a history of working together for close to 20 years.
In JAVAD GNSS we raised the bar of GPS/GLONASS integration to a higher level and focused in two new directions. The first was to eliminate the problem of GLONASS inter-channel biases, which is inherent to the GLONASS frequency-division multiple access (FDMA) signal structure. The second was to support the opinion of GLONASS engineers who were pushing for a new code-division multiple access (CDMA) signal for GLONASS, similar to the GPS signal.
We resolved the GLONASS inter-channel biases issue around 2009 and announced, “Our GLONASS is as good as GPS.”
On the second front, we worked with the top managements of ISDE and the Information Analysis Center (IAC) of the Russian Space Center to demonstrate the advantages of CDMA for high-precision applications.
Some years ago, Stas had confided in me that the issue of CDMA was nothing new, and had been extensively deliberated at all levels of various GLONASS organizations during the early design phase of the system. The result of all these discussions was that engineers and technical people favored CDMA, but the higher management, mostly influenced by the military organizations, held out for FDMA. The reason for favoring FDMA is still a secret, though some believe that they just wanted to be different from GPS and did not see much advantage in CDMA. Some also believed FDMA gave better jamming protection.
Of course in those very early days, no one imagined using GPS or GLONASS for high-precision applications, and as such truly there was not much difference between CDMA and FDMA. Much later, the notion of using carrier phase of GPS and GLONASS signals for high-precision applications was discovered, and then the advantages of CDMA became relevant, as Dr. Ivanov also hinted in our first meeting.
After we combined GPS and GLONASS, and as a lot of our worldwide users began comparing the two systems, the issue of CDMA versus FDMA again came up for discussion among the GLONASS authorities.
More recently, since 2007, we had several meetings in the offices of ISDE in Moscow, in IAC in Korolev (the Russian Space City), and several in our JAVAD GNSS office in Moscow. Most importantly, we had several meetings in my Moscow apartment, enhanced by Russian vodka and the best Armenian cognac, courtesy of Sergey Revnivykh, head of IAC. All meetings were open and candid, discussing and demonstrating the advantages of CDMA, in support of the ISDE engineers who were reluctant to express their opinion above certain levels.
I also met with the head of the Russian Space Agency, Dr. Anatoly Nikolayevich Perminov, who personally supported and sponsored me in obtaining an extended Russian residency visa. Let me also express my appreciation for receiving the Medal of Honor from the Russian Cosmonauts Federation, along with the official astronaut watch. I don’t understand the reason for receiving a Kalashnikov AK-47 semi-automatic rifle from ISDE for my birthday. I wonder how I can transport it home!
General Anatoly Shilov (deputy director of the Russian Space Center), Dr. Vicheslav Dvorkin (GLONASS deputy general designer), Sergey Revnivykh, Viktor Kosenko (first deputy of chief GLONASS designer) and Sergey Karutin (GLONASS senior scientist) are the new generation of GLONASS leaders who deserve credit for supporting CDMA on GLONASS. Recently, a new GLONASS-K sat-ellite was launched, transmitting an experimental CDMA signal in addition to the legacy signals. Almost immediately, we announced tracking of the new GLONASS-K satellite and its new L3 signal details, hours after it started transmitting. See GPS World archives and our website for details of this signal which seems, in all aspects, as good as GPS.
Another new issue of significant international concern was a new frequency for GLONASS. This issue was more political than technical, and is discussed under the umbrella of interoperability.
In the early days of my frequent travels to Russia, the KGB probably suspected that I was a CIA agent — and the CIA probably suspected that I was a KGB agent! I would not be surprised if both the CIA and KGB monitored every bit of my travels and activities. After some years, the San Francisco airport authorities stopped interrogating me for my activities in Russia any time I came back home. Perhaps because of their deep investigations, I earned the trust and friendship of both sides, and their confidence that I had nothing in mind other than helping to integrate GPS and GLONASS. I was an unofficial member and friend of both U.S. and Russian delegations during the so-called interoperability discussions since 2007, which sometimes touched on the CDMA issue as well.
Some of the most fruitful and friendly discussions between the U.S. and Russian delegations occurred in my apartment in Moscow, after their official meetings. Ken Hodgkins of U.S. State Department; Mike Shaw, director of the National Space-Based Positioning, Navigation, and Timing Coordination Office; David Turner, director of the Center for Space Policy & Strategy; Scott Feairheller of the U.S. Air Force; and Tom Stansell, consultant to the GPS Wing were some of my honored guests.
The new GLONASS frequency discussions are still in progress, and I am proud to host and support both sides the best that I can. Sometimes it is fun to observe that discussions resemble poker games where hands are known to all sides, but players still try to bluff each other! Let’s leave it at that for now.
In May of this year, I had a conversation with General Anatoly Shilov, now second-in-command of the Russian Space Agency, reporting to the first deputy of the minister of defense, General Vladimir Popovkin, who recently replaced Dr. Perminov as head of the Russian Space Center. This is an indication of increased attention and support from the Russian government to its GLONASS program. In our conversation, General Shilov was enthusiastic and optimistic that the GLONASS program will move forward faster.
GLONASS has proven to be a real and reliable complement to GPS. If it were not for the failure of the launch of three GLONASS satellites in December 2010, its constellation would be complete and fully, globally operational today. It will happen soon. Sergey Revnivykh estimates that currently the system has 99.8 percent global coverage.
Today, a truly reliable and fast RTK is not possible without combining GPS and GLONASS satellites.
The most recent testimony to the success of GLONASS comes from the long-time GLONASS opponents who once criticized me for supporting the system. Recently they had to pay a lot of money to acquire the first company that I founded in Moscow, which they believed would never survive.
This year at JAVAD GNSS, I and most of my original employees and GLONASS designers are celebrating our 20th year in Russia, and we are working harder to make the integration of GPS and GLONASS even better.
On May 7, 2010, Stas lost to leukemia. He was not present to witness the successful introduction of our TRIUMPH-VS receivers. My refrigerators in Moscow are full of medicines that he brought for me any time I had a little cold. I miss him a lot, and our team is dedicated to following the path that Stas loved so much.
I want to briefly summarize the current status and the future of GPS and GLONASS from the users’ point of view.
GLONASS now has 24 satellites transmitting FDMA signals in two frequency bands. The failure in the last launch to deploy three more satellites delayed completion of the constellation to the end of 2011. The good thing about GLONASS is that both of its L1 and L2 signals are not encrypted and give better data than GPS P1 and P2 that are encrypted.
GLONASS is considering a plan to add CDMA signals to all satellites and not suffer from inter-channel biases. But it will take about 10 years for this plan to become complete for public use, even if the plan is approved and followed. At JAVAD GNSS, we have already mitigated the effect of GLONASS inter-channel biases to the accuracy of better than 0.2 millimeters. We made GLONASS FDMA the same as GPS CDMA by adding some innovations (patent pending) and enhanced algorithms.
The GPS plan is to add a third frequency signal (called L5) and add an unencrypted signal in L2. But it will take several years to have enough new satellites transmitting these new signals to make them usable for daily work.
In the near term, we have two complete systems, consisting of about 30 GPS and 27 GLONASS satellites. The current non-encrypted GLONASS signals give it an edge over the current GPS encrypted signals, given the fact that we have mitigated the GLONASS FDMA inter-channel biases.
GLONASS is also enhancing its control segment to better monitor GLONASS satellites and improve the system’s clock and orbit parameters. Most of these errors are cancelled in differential and high-precision applications anyway.
Existence of two complete and free systems, GPS and GLONASS, will place some doubt on the future of Galileo, as it will be extremely difficult for Galileo to hope to collect money from users to fund itself. The addition of Galileo, as a third system, will not really add much benefit for users anyway. The only push for deploying Galileo must come from some European military organizations to support their specific interest.
I have been extremely fortunate also to have had the opportunity to work on GPS from its early days, co-pioneering high-precision applications at Trimble Navigation. I owe a lot to Charlie Trimble, who helped me to lift myself up when I sought refuge in the United States in 1981. He taught me GPS as well as dedication in business. I also benefitted from Sunday meetings with Dr. Bradford Parkinson, the first program director of GPS, who was and still is a board member of Trimble Navigation. I am curious to find out how Brad, as a board member, voted in the recent matter of the purchase of Ashtech. Since leaving Trimble, my innovative products at Ashtech, JPS, and JAVAD GNSS have been well documented through the years in GPS World.
My emphasis on GLONASS in this memoir is only to record some histories and recognize GLONASS and some of its pioneers who were often overlooked. GPS is already a well-known, well-established system and is the backbone of GNSS.
As a final note, let me add that our current JAVAD GNSS products have the option of tracking all current and future signals of GPS, GLONASS, QZSS, and Galileo. Yes, Galileo too!
By Ahmed M. Kamel, Daniele Borio, John Nielsen, and Gérard Lachapelle, University of Calgary
A fuzzy tracking system performs as a narrow bandwidth tracking system in terms of noise reduction, and a wide bandwidth tracking system in terms of dynamic response, overcoming the contradiction between receiver bandwidth requirements using classical tracking techniques for either noise reduction or dynamic tracking.
Autonomous navigation systems onboard precision guided missiles or fighter planes depend on GNSS and its very weak signals for positioning and navigation. Performance of a GPS receiver usually depends on the phase-lock loops (PLLs) used to down-convert these weak signals and track their carrier phase and frequency. A PLL can properly work only if its bandwidth is wide enough to track the signal dynamics, which can be significantly high, given the extremely rapid movements, accelerations, and direction changes of a missile or plane. On the other hand, wide-loop bandwidths allow larger portions of noise and interference to enter the tracking loops and disturb the signal tracking process. Excessive noise and interference can lead to loss of lock.
Aiding from a frequency lock loop (FLL) allows reducing the PLL bandwidth. This cannot prevent, however, frequent loss of lock and can be strongly affected by interference. The tradeoff between bandwidth requirements motivates design of alternative tracking systems replacing conventional FLL-assisted-PLLs.
We used fuzzy systems to design and test an innovative FLL-assisted-PLL. The output of a fuzzy controller that replaced standard loop filters drives the numerically controlled oscillator (NCO). The proposed fuzzy frequency phase lock loop (FFPLL) uses both frequency and phase discriminator outputs to generate the required frequency changes to tune the NCO, which in turn generates the local carrier for signal down-conversion.
The main core of any fuzzy system is its fuzzy sets or membership functions (MFs) that map input/output parameters into defined linguistic variables describing the input/output states. Loop discriminator outputs mainly depend on the incoming signal carrier-to-noise power density ratio (C/N0) and have a probability density function (PDF) that, under lock conditions, can be accurately approximated by a Gaussian distribution. Although the mean of this Gaussian distribution is zero under normal tracking conditions, it can be affected by sudden changes in the presence of dynamics that can cause cycle slips and other phase errors. The standard deviation of this distribution is also dependent on the signal quality and hence on the interference level. For these reasons, the discriminator output values have been clustered into several overlapped Gaussian MFs that can linguistically describe their state. The variance of the Gaussian MFs assigned to the phase and frequency discriminator outputs are adaptively tuned according to the incoming signal quality. So any change in the interference power level leads to variations in the Gaussian MF variance to ensure accurate linguistic description of the discriminator output signal. The fuzzy rules are selected to tune the NCO and ensure accurate and robust signal tracking.
We assess performance of the fuzzy tracking system in the presence of different power levels of interference. To generate GPS signals corrupted by radio frequency (RF) interference, we used a hardware GPS signal simulator combined with two external signal generators, and applied different interference levels combined with missile harsh dynamics to test the proposed system. Results show that the fuzzy tracking system significantly improves system robustness and accuracy such that it is able to track very high dynamics with reduced tracking jitter. The system shows resilience against strong interference up to a certain extent where increasing jamming levels are compensated by the online adaptation of the MF distribution on the basis of a small amount of data or C/N0 information.
The system performs favorably against standard tracking loops that cannot sustain the same level of dynamics and interference. The adaptive FFPLL can sustain interference power levels up to J/S = 40 dB. Even when the algorithm loses lock, a fast, reliable reacquisition is obtained when the interference power is reduced.
Theoretical Basis
Most physical processes are nonlinear in nature. Linear approximations and models are employed because linear systems are simple, understandable, and can provide acceptable approx-imations of the actual processes. Unfortunately, most tracking problems are too complex, and their linear approximation does not provide sufficient insight on the system in all environmental conditions.
Standard tracking loop filters are obtained by solving an optimization problem where the noise characteristics and the order of the signal dynamics are known. Different loop orders are obtained for different orders of dynamics. Moreover, the optimization problem is usually solved by considering a linear approximation of the loop. These assumptions are strong, but the standard solution can fail to provide satisfactory performance when the loop is no longer working in its linearity region, or the noise characteristics are not completely known. In such conditions, an approach based on a linguistic description of the system variables may be preferable. In that sense, fuzzy control systems provide sufficient tools for designing a robust alternative to standard loop filter.
In previous cases where researchers tried to use fuzzy techniques for PLL design, they used fuzzy logic controllers (FLCs) in parallel with a classic PLL architecture. We take a different approach, designing a new fuzzy rule-based tracking system to replace the standard FLL-assisted-PLL. The new system uses the noisy phase and frequency discriminator outputs and directly produces a control signal that represents the frequency change required by the NCO to maintain phase lock.
New Signal-Tracking Approach
GPS L1 signals consist of carrier, spreading code, and navigation data. To successfully demodulate the navigation data from the received signal, an exact carrier wave replica must be generated, generally using PLLs and FLLs. Figure 1 shows the basic block diagram of a standard PLL. The two first multiplication stages are required to wipe off the input signal carrier and pseudorandom noise (PRN) code required for any CDMA communication system. A local replica of the PRN code is provided by the delay lock loop (DLL) and is used to remove the PRN sequence from the incoming signal. The carrier loop discriminator is used to estimate the phase error between local and incoming carrier. The discriminator output, which represents the phase error, is then filtered and used to tune the NCO, which adjusts the frequency of the local carrier wave. Thus, the local carrier wave tends to be a precise replica of the input signal carrier.
FIGURE 1. Basic PLL block diagram (courtesy of Kai Borre).
PLL design is a challenging task, particularly if the receiver is affected by high dynamics, or if the input signal power is low due to signal interference or degraded environments. It is therefore desirable to provide robust algorithms for the PLL design.
FLLs are more resilient against signal dynamics and produce accurate velocity measurements. PLLs however also provide signal-phase information, leading to a simplified data demod-ulation process as compared to FLLs. Several attempts to combine the benefits of both loops have been done in the past, leading to various FLL-assisted-PLL schemes where the joint use of the two loops becomes an effective way to accomodate high signal dynamics. The ability of a tracking loop to track signal dynamics is also determined by the loop order. For high dynamic
scenarios, a 3rd order PLL is usually used as it is only sensitive to acceleration jerks. Higher-order PLLs can produce system instability and greater noise level. Figure 2 shows the loop filter of a typical 2nd order FLL-assisted 3rd order PLL, where T is the update period of the loop. All the gains shown in the figure are design parameters and function of loop bandwidths, Bnp and Bnf , as reported in Table 1.
Figure 2. Schematic of a loop filter of a 2nd order FLL-assisted 3rd order PLL (courtesy of Elliot Kaplan).Table 1. FLL-assisted-PLL loop filter gains.
The response of a GPS receiver to different signal-to-noise levels depends mainly on the code and carrier (phase/ frequency) tracking loop bandwidths. However, there is a trade-off between noise resistance and response to dynamics. Narrow bandwidth track-ing loops are more resistant to noise, which makes them suitable for moderate jamming environments. Wide bandwidth tracking loops are more responsive to dynamics. Thus, tracking loop bandwidth requirements for GPS receivers are conflicting. One solution is to adapt the tracking loop bandwidth to the receiver measured carrier-power-to-noise density ratio (C/N0) and receiver dynamics. However, this approach can hardly solve for both concerns at the same time; trade-off must be found.
Automatic control methods based on artificial intelligence approaches (for example, fuzzy systems, neural networks, and genetic algorithms) have emerged as an alternative model to analytic control theory. One of the greatest advantages of fuzzy controllers is the simple and intuitive design. On the other hand, this simplicity is perhaps the primary cause of their initial slow acceptance among the control community.
Figure 3 shows the structure of the system design, where the standard loop filter is replaced by the proposed FFPLL controller. The fuzzy controller is composed of three consecutive layers named as fuzzification, fuzzy associative memories (FAMs, or fuzzy rules or fuzzy associations), and defuzzification layers.
Figure 3. Schematic diagram of a fuzzy tracking loop design.
The fuzzification layer is composed of a number of fuzzy sets characterized by MFs determined by the designer. These MFs are responsible for converting the crisp input values into linguistic values. The defuzzification layer is related to the fuzzification layer through the FAM rules that compose the second layer. FAM rules operate in parallel and to different degrees. Each is a set-level implication and represents ambiguous expert knowledge or learned input-output transformations. The system nonlinearly transforms exact or fuzzy state inputs to a fuzzy set output. This output is defuzzified with a centroid operation to generate an exact numerical output.
System Design
The fuzzy frequency/phase tracking system is designed to rapidly recover the signal frequency in the presence of large frequency errors, that is, after acquisition/reacquisition, and to behave as a PLL, with precise phase recovery, in the case of small frequency errors. The fuzziness of the system inputs is mainly due to the low power of GPS signals with respect to thermal noise, the main source of phase/frequency jitter. Noise distribution then plays a major role in the system design. This is why an a priori knowledge of expected signal parameters such as C/N0 is essential. This knowledge can be achieved during signal acquisition or in the first stages of signal tracking. For example; a signal with a C/N0 equals to 39 dB-Hz, in static condition and in an interference-free environment, is characterized by a phase discriminator output with a distribution approximately Gaussian as shown in Figure 4. The standard deviation of this signal, when using a standard PLL, can be theoretically calculated as follows:
where (rad) is the standard deviation the dot-product discriminator, which also suits well the arctangent discriminator used in this research, T (s) is the predetection integration time and c / n0 carrier to noise power expressed as a ratio (Hz).
Figure 4 shows the time-domain representation for the phase-discriminator output during tracking the incoming signal received from PRN 5 using a 4 Hz 3rd-order PLL in 1-millisecond coherent integration time and its histogram with the Gaussian function approximation. The corresponding Gaussian probability density function (PDF) in this case covers the signal expected values in standard tracking conditions at certain C/N0 levels, and it can be linguistically described as zero-state if compared to the ideal phase discriminator output. The mean and standard deviation, which are the two main parameters that govern the Gaussian distribution function, are directly related to the signal dynamics and signal quality respectively.
FIGURE 4(a). Time domain representation of a PLL phase discriminator output, (b) Histogram and Gaussian approximation, (c) An example of mapping between PDF and MF.
Receiver dynamics can cause phase tracking errors, and hence the distribution mean will be shifted from zero. On the other hand, the changes in signal quality will produce changes in the standard deviation as illustrated in Equation (1). An appropriate mapping between the signal PDF and fuzzy MFs can be made, and in this case, the probability of occurrence described by the PDF will be replaced by a degree of occurrence sensed by a number of overlapped Gaussian MFs as shown in Figure 4(c).
Using this approach, both phase and frequency-error inputs in addition to the NCO tuning-frequency output domains are clustered into several overlapping Gaussian fuzzy sets, each of them describing a certain linguistic definition of input or output value (big, medium, small, zero, and so on). The number of MFs adopted for the fuzzy controller is reported in Table 2.
Table 2. Distribution of fuzzy membership functions.
The number of fuzzy sets associated with each fuzzy variable is a design parameter selected according to the required tracking accuracy. How much these contiguous sets should overlap is also a design issue depending on the problem at hand; too much overlap blurs the distinction between the fuzzy set values, whereas too little overlap can produce excessive overshoot and undershoot.
The fuzzy rules that relate all the linguistic variables can be expressed as:
Ri : if x1 is Ai1 and x2 is Ai2,
then y is Bi. i = 1, 2 . . . 81
where x1, x2, and y are linguistic variables, and Ai1, Ai2 and Bi are linguistic labels (or fuzzy sets) characterized by an MF. A defuzzification process is used to determine a crisp value according to the fuzzy output from the inference mechanism. The fuzzy centroid method, which calculates the center of the area of the infer
ence mechanism output possibility distribution, is used as defuzzification strategy in the FFPLL. The output y is obtained as
(2)
where n is the number of fuzzy output sets, yi is the numerical value of the ith output membership function, and u(yi) represents its membership value at the ith quantization level. Table 3 shows the fuzzy rule table providing the human knowledge base of the controller.
Table 3. Fuzzy rules. The terms are B: big, MB: medium big, M: medium, S: small, and Ze: zero.
Gaussian MFs ended by trapezoidal rules were chosen as shown in Figure 5, Figure 6, and Figure 7, respectively. The variance of each Gaussian function can be changed according to signal noise level as described earlier, and online adaptation can be performed as described in a later paragraph. The FAMs are designed to act like an FLL for fast frequency tracking recovery in case of large frequency error indicated by the frequency discriminator. That can be seen in Table 3 in all the rules except when the frequency error is in the zero region. In this case it starts to look for the phase error, which is indicated by the phase discriminator for accurate phase tracking, and to extract the required data message.
Figure 5. Phase membership functions.Figure 6. Frequency membership functions.Figure 7. NCO tuning frequency membership functions.
Interference Effects
As shown in Equation (1), higher C/N0 values ensure a small noise standard deviation, hence accurate and stable tracking. Increasing signal interference level will decrease the C/N0 level.
Interference signal power usually changes according to the receiver maneuver by approaching or moving away from a jammer, jammer motion, or to the jammer power changes. These changes affect the effective C/N0 on the receiver side. The analogy between Gaussian noise distribution and fuzzy MFs as shown in Figure 4 still holds, but a continuous change of the MF parameters — particularly the standard deviation — is required to cope with the C/N0 variations.
For online adaptation of the MFs, the noise standard deviation associated with the phase and frequency discriminator outputs must be continuously estimated. This can be done using past samples from the phase and frequency discriminators. Small analysis windows, used for collecting past phase and frequency discriminator samples, should be used to properly follow rapid changes due to the interfering signal. A tradeoff between sensitivity and accuracy must be taken into consideration. For this research, we found a small analysis window with a width of 1 second to be enough for good sensitivity at high dynamics. Figure 8 shows the modified FFPLL system with the standard deviation estimation. This information is used for the online adaptation of the Gaussian fuzzy MFs.
Figure 8. Modified FFPLL with estimation of phase and frequency discriminator output standard deviation for MF online adaptation.
Test and Simulation
The primary equipment used for testing the proposed algorithm is a hardware simulator. The hardware configuration is capable of producing GPS signals in the L1, L2 and L5 frequencies in addition to adjustable additive interference through two separate signal generators. Several custom scenarios representing typical missile motion in space have been designed and tested. The radio frequency (RF) signals are collected through a front end after passing through an external low noise amplifier (LNA) using sampling frequency of 10 MHz, and saved for post-processing.
To assess performance of the tracking algorithm under interference and dynamic effects, we designed two categories of simulation scenarios. The first category is designed to test interference effects where a static receiver with gradually increasing interference level has been used. Both the interference and high dynamic effects are examined in the second category, in which scenarios of a missile that maneuvers near an interference source are designed. Four different tracking schemes are used for GPS signal tracking. They include the usage of a standard PLL with narrow and wide bandwidths (4 Hz and 14 Hz, respectively), FLL-assisted-PLL using narrow bandwidths (3/4 Hz), and finally the new FFPLL. The performance of each algorithm is evaluated by assessing the continuity of tracking during high dynamics, that is, the ability of the receiver to maintain lock, and the noise standard deviation of the estimated Doppler.
Interference Effect on Accuracy
The first test category involves studying the interference effect on GPS signal tracking capability and accuracy, using a custom scenario of a static GPS receiver with gradually increasing interference level. A continuous wave (CW) interference signal centered at the L1 frequency is combined with the generated GPS L1 signal and collected by the front end for post processing. Figure 9 shows the increasing interference effect on the signal quality particularly the signal C/N0. In this scenario, the jamming to signal (J/S) interference power is gradually increased every 10 seconds in steps of 10 dB each starting from 0 dB higher than the GPS L1 power.
Figure 9. PRN 23 C/N0 level changes due to increasing interference power.
After reaching an interference power of about 40 dB higher than the GPS power, none of the tracking algorithms was able to track the signal and hence 40 dB is considered the maximum jamming tracking threshold. Figure 10 shows the estimated Doppler standard deviation for PRN 23 using the four tracking schemes described earlier at different interference levels. It is clear that the FFPLL scheme is superior to the other three conventional tracking schemes in terms of Doppler tracking jitter and hence tracking accuracy. The changes in C/N0 level due to the increasing interference level affect the discriminators output noise level as described in equation (1). These effects can be noticed clearly in Figure 10. On the contrary, these changes are almost absorbed by the adaptive FFPLL, and hence the C/N0 changes have a minimum effect on the Doppler tracking accuracy.
Figure 10. Doppler standard deviation calculated for PRN 23 using four tracking configurations.
Interference and High Dynamics
The second test category assesses the system performance under CW interference and high dynamics. The scenario considered here comprises the effect of missile maneuver near an interference source. Due to this maneuver, the GPS signal C/N0 is changed with the distance from the interference source. The missile velocity in this scenario is increased to reach 300 meters/second performing hard maneuvers with acceleration up to 8 g and jerks up to 50 g/second. The same scenario is repeated five times with different CW interference powers. Due to missile high dynamics narrow bandwidth PLL or FLL/PLL was not able to p
rovide continuous signal tracking and losing lock occurred, that is why only a 14 Hz bandwidth PLL and FFPLL are considered. Interference powers generated are 20, 30, 40, 45, 50 dB respectively above normal GPS signal power. Figure 11 shows the 3D plot of missile trajectory and its maneuver near the jammer, while Figure 12 shows the effect of this maneuver on the signal C/N0 for PRN 3 when a 40 dB interference signal is applied. C/N0 increases and decreases according to the separation from the interference source.
Figure 11. 3D plot of the missile maneuver near an interference source.Figure 12. C/N0 evaluated as a function of time for PRN 3 during maneuver around an interference source.
Tracking results show the ability of continuous tracking under interference level up to 40 dB higher than the GPS signal for both PLL 14 Hz and FFPLL. Higher levels of interference lead to tracking loss. FFPLL is able to recover tracking mode and retrieve the signal phase when interference source is disabled due to missile maneuver away from the jamming source whereas the wideband PLL is not able to retrieve back the signal phase in these high dynamics conditions.
Figure 13 shows the effect of adding a 40-dB interference signal on PRN 3 estimated Doppler and Doppler standard deviation respectively, using PLL 14 Hz and FFPLL. Tracking continuity is achieved using both algorithms; the interference signal greatly affects PLL tracking accuracy whereas FFPLL tracking accuracy is much better in both interference and interference free conditions.
Figure 13. Estimated Doppler calculated for PRN 3 using PLL 14 Hz and FFPLL at J/S = 40 dB.
Conclusions
The fuzzy tracking system solves the contradiction between receiver bandwidth requirements using classical tracking techniques for either noise reduction or dynamics tracking. It shows better performance in both cases since it performs as a narrow bandwidth tracking system in terms of noise reduction, and a wide bandwidth tracking system in terms of dynamic response.
The fuzzy tracking algorithm FFPLL provided tracking robustness in very high dynamics and signal interference up to 40 dB higher than GPS L1 power. The noise level calculated from the estimated Doppler is small, equivalent to results obtained with a very narrow PLL bandwidth under normal conditions. During high dynamics, tracking continuity is achieved using FFPLL with dynamic performance comparable to a wideband PLL or FLL/PLL. Signal tracking recovery is achieved if the interference power causing signal tracking denial is reduced or turned off.
Manufacturers
Spirent GSS7700 simulator, National Instruments PXI 5661 front-end.
Ahmed M. Kamel is a Ph.D. candidate in the Position, Location and Navigation (PLAN) Group at the University of Calgary. He holds an M.Sc. in electrical engineering from Military Technical College (MTC), Cairo, Egypt.
Daniele Borio received a Ph.D. in electrical engineering from Politecnico di Torino, Italy, was a senior research associate in PLAN Group, and is a post-doctoral fellow at the Joint Research Centre of the European Commission.
John Nielsen is an associate professor at the University of Calgary.
Gérard Lachapelle is professor of geomatics engineering at U. of Calgary, Canada Research Chair in wireless location, and head of the PLAN Group.
Plus: Locata as Alternative PNT, Indian SBAS, Galileo Launch
Slow but steady progress of the Working Group (WG) convened by the Federal Communications Commission (FCC) to study the GPS overload/desensitization issue is related in the group’s Third [monthly] Pogress Report, filed with the FCC on May 16. For the third consecutive time, the report contains little in terms of actual results of testing for interference/desensitization of GPS receivers by the proposed LightSquared terrestrial signal. It continues to carefully lay out the ground rules adopted by several subteams for testing the particular receivers in their domain. As of the date of filing, it reported, “testing is underway for six device categories and has been completed for the Space-Based Receivers category.”
As related in May’s The System, the Working Group has self-divided into sub-teams.
Aviation Sub‐Team. Laboratory testing was scheduled to be completed by May 20, conducted by Zeta Associates. The team’s report is being compiled, and some receivers were to be made available for field testing near Las Vegas.
The Federal Aviation Administration (FAA) issued a flight advisory warning pilots that GPS service in one area of Nevada could be “unreliable or unavailable” May 16–27, during LightSquared testing. Tests were to be conducted in six-hour blocks.
“Pilots are strongly encouraged to report anomalies during testing to the appropriate ARTCC to assist in the determination of the extent of GPS degradation during tests,” said the advisory.
Cellular Sub‐Team. Two of the three laboratories engaged to perform radiated and conducted testing have added work shifts to complete their processes by the TWG’s deadline; the third lab is being configured. Forty-five models of GPS-enabled cell phones will undergo testing, following a detailed procedure described in Appendix D to the report.
General Location/Nav Sub‐Team. This team recently added new members representing public safety users at the request of the National Public Safety Telecommunications Council (NPSTC). See related article, “LightSquared Interference with Emergency Service.“ The sub‐team has accumulated live‐sky GPS test data for use in dynamic testing scenarios, and plans further field tests in the Las Vegas, Nevada, area, described in Appendix G.
High-Precision, Networks, Timing. The sub teams have completed testing of all devices in the NAVAIR lab facility. Some team members expect to have some receivers of the same models that have been tested by NAVAIR available for field testing in Las Vegas, and are working to develop test procedures for the field tests.
Space-Based Receivers. The team completed its laboratory testing activities as reported on April 16, and is now reviewing the initial draft analysis of the impacts.
Senate Letter
Meanwhile, the U.S. Senate is showing increasing signs of life in response to the problem. As of May 23, a total of 32 senators had signed a letter to the FCC initially drafted on April 15 by two U.S. senators from the heartland, Pat Roberts (Republican, Kansas) and Ben Nelson (Democrat, Nebraska). The joint public letter urges action in the form of “asking the FCC to take all necessary steps to protect GPS.”
What sway, if any, the Senate holds over the FCC, which forms part of the executive (presidential) branch of government, remains unclear. However, the letter does signal some heightened interest in Washington, presumably as a result of hearing from constituents. Kansas and Nebraska, of course, have large-scale farming activity, in which precision agriculture driven by GPS plays a significant role.
The two original authors state that “the International Bureau, a sub-organization within the FCC, granted a conditional waiver to allow a single company, called LightSquared, to build tens of thousands of ground stations that may cause widespread interference to neighboring GPS signals.”
The letter goes on to outline the many key roles that GPS plays in economic activity and specifically in “economic recovery,” public safety, aviation, and national defense. “Reliable GPS affects virtually every American,” Nelson and Roberts assert.
They close by “calling on the FCC to ensure that GPS is not compromised in any way. To do so, the full commission must be involved and require LightSquared to objectively demonstrate non-interference as a condition prior to any operation of its proposed service. Anything less is an unacceptable risk to public safety.”
The latest signer, Senator Chuck Grassley of Iowa, writes on his website that “Given the FCC’s haste so far, I worry that LightSquared will not have interference problems resolved before given the green light to become fully operational. Farmers shouldn’t have to worry that they’re planting the correct seed or applying the precise amount of fertilizer needed for the soil to optimally produce the crop, and ambulance drivers shouldn’t have to weather taking a wrong turn or driving into a ditch because a new system is scrambling their existing navigational technology.”
Grassley adds, “If anything, the shadows around the LightSquared project should have led the FCC to proceed with caution rather than step on the gas. Yet the opposite happened. The agency originally planned to take public comment on a key regulation necessary for green-lighting the project for only one week. The commission relented and held the comment period open longer only after consumers and affected businesses protested.”
Defense. Congressman Mike Turner included language in the National Defense Authorization Act (NDAA) that requires the Secretary of Defense to notify Congress if he determines there is widespread interference with the military’s use of GPS caused by a commercial communications service. Turner, the House Armed Services Subcommittee chairman on Strategic Forces, has legislative jurisdiction over space and satellite systems, and included the provision in his Mark of the NDAA.
LightSquared Interference with Emergency Services, Public Safety
Law enforcement, emergency medical service (EMS), and fire first-responders in the state of New Mexico who participated in LightSquared/GPS interference testing at Holloman Air Force Base have submitted reports verifying a negative effect of LightSquared transmissions on their GPS equipment.
A cover letter from the New Mexico E-911 program director states that the reports “substantiate concerns that the LightSquared network will . . . jeopardize 911 and public safety nationwide.”
The director of emergency services for Otero County, New Mexico, writes that “during the testing process the [ambulance’s automatic vehicle location] unit was limited to only being able to see 7 satellites at any location and upon moving just 50 yards from our position at the test site towards the [LightSquared] tower were diminished to 3 or 4 satellites and at 60 yards unable to establish any satellite connections. This is still approximately 1/8 of a mile from the tower.”
The tests were conducted on April 15 and 16 of this year at Holloman Air Force Base, in a live sky environment.
Locata Flight Results; ICAO to Weigh for Alternative PNT
“The Need for an Alternative PNT” was presented to the International Civil Aviation Organization’s (ICAO) 10th meeting in Montreal, Canada, on May 19 by the Australian delegation, proposing a new method for alternative position, navigation, and time (APNT). ICAO accepted the paper, and the Locata technology it describes, placing it on the table as a potential back-up to GPS. The organization will take up the discussion at its next meeting in October.
Locata Corporation of Griffith, Australia, also released preliminary post-processing analysis on data collected during its APNT flight trial on May 9. An aircraft fitted with a Locata receiver and several truth-reference devices recorded data for three hours while flying at approximately 7,000 feet. The Locata receiver tracked a ground-based network of six LocataLites, which provided positioning signals to cover an area of approximately 1,500 square kilometers. The aircraft flew pre-defined patterns that gave varying distances to LocataLites (3–49 kilometers) during the test.
During this trial, the Locata first acquired and tracked LocataLite signals at a range of 51.9 kilometers, according to the company, which provided an early-stage assessment of the performance of the Locata pseudorange-based (code) solution against a high-precision carrier-phase differential GPS solution. Figure 1 shows the difference in East, North, and Height between the high-precision GPS truth carrier solution and the Locata code solution. Relative to the high-precision GPS, the Locata code solution has a 95 percent RMS in horizontal of 2.1 meters and 3.2 meters in vertical. The company attributed the larger difference in the vertical to worse dilution of precision in the vertical component for this specific physical deployment of its network. Over this test data analysis, the Locata’s average VDOP of 3.3 compared to an average HDOP of 1.5.
One test objective, the company stated, was to obtain information on the significant tropospheric effects inherent in a ground-based system over these sorts of ranges. Further detailed analysis is now underway to measure and then reduce the residual biases present in the Locata code solution. For this first-pass data analysis these biases are approximately –0.8 meters in North and –1.1 meters in height. When these residual biases are further analyzed and reduced, Locata anticipates that the 95 percent RMS code-solution accuracies will improve to better than 1 meter horizontal and 2.5 meters vertical.
Locata emphasized that this is an early-stage analysis of first flight tests, expressly designed to provide data for a better understanding of the Locata system’s performance characteristics in ICAO-type APNT applications, and for a USAF-contracted LocataNet deployment at White Sands Missile Range that will cover more than 6,500 square kilometers. Further flight trials are planned in the near future to refine the system.
In Q3/2011 Locata expects papers to be published on carrier-phase performance observed over multiple flights, with presentations during ION 2011 Conference in Portland, Oregon.
Figure 1. Difference in East, North, and Height between preliminary Locata pseudorange-based solution and high-precision differential carrier-phase GPS solution.
Indian SBAS Aloft
The Indian Space Research Organisation successfully launched a GSAT-8 satellite, carrying a GPS-Aided Geo Augmentation Navigation (GAGAN) satellite-based augmentation system (SBAS) transponder, on May 21, aboard an Ariane-V launch vehicle, from Kourou, French Guiana. The satellite will be stationed at 55 degrees east longitude.
Galileo Picks October 20
The first two operational/validation satellites of the Galileo project received a launch date of October 20 of this year. Antonio Tajani, European Commission vice-president for industry and entrepreneurship, predicted that this will keep the system on track for provision of “three early services in 2014/2015 based on an initial constellation of 18 satellites.”
I met Chris Litton (right) at my first European Navigation Conference in Sevilla, Spain, May 2001. I recall a long conversation over a dinner of Moorish and Andalusian dishes, attended by the staffs of NavCom Technology and GPS World, in the Mesón Don Raimundo.
Over the years we met again and again at conferences hither and yon. “Great cities of the world!” became our greeting. As sales manager for NavCom, then for the NavCom division of John Deere & Co., from 1995 to 2007, Chris saw many more of those cities than I did. A GPS road warrior.
I’m very happy to announce that we now play on the same team — to your ultimate benefit. Meet J. Christopher Litton, international account executive and ad manager for GPS World magazine, website, e-newsletters, webinars, and the whole enterprise.
Add to his decade-plus at Navcom the subsequent years, up to present date, doing similar things for Septentrio Satellite Navigation, earlier experience as co-founder of Litton Consulting Group, where he helped establish NavCom, and deep background as U.S. Navy gunner’s mate missile system specialist.
As a result, your business partner here knows more about GNSS markets and technology than the editor. That not only distinguishes us from the crowd — it’s got to be worth something. To you.
For the 6.7 percent of our subscribers who are actual or potential advertising decision-makers, this is worth a great deal. Give him a ring or shoot him an e-mail query about reaching your business development goals. He’ll have something concrete, knowledgeable, and effective to suggest. He can implement your message, simultaneously and synergistically, across many platforms: print, electronic, social media, exhibits, and more. He’ll visit you for an in-depth skull session. A GNSS road warrior, traveling to all cities of the world, great and small.
The balance of 93.3 percent — or really, all our readers — will benefit from Chris’ knowledge and marketplace vision, helping me shape and steer this vast starship across the far reaches of positioning, navigation, and timing.
Ed. note: I originally published this article in 2010. I occasionally re-run it as it generally receives interesting reader response.
Get It Surveyed (GIS) always brings out a small roar of laughter at the local RPLS chapter meeting. Hardee, har, har. The irony is that if you laugh at that joke, then you might as well wear a sign on your head that says “GIS Dummy.” GIS isn’t about accuracy. I’ve said it many times and I’m sure I’ll say it many more times. The fact is that the average land surveyor is only exposed to a small sliver of how GIS’s are used, namely parcel databases.
Do you think when McDonald’s is planning (not building) a new restaurant that they care if the parcel accuracy is +/- a tenth? Of course not, accuracy of tens of feet (or even hundreds of feet) suffices in the strategic planning phase. What they care about is a demographic analysis of the area, local competition, traffic behavior, etc. The power of GIS is that it can handle this sort of data and answer questions such as “show me all of the 3+ acre commercial parcels for sale within 500 ft. of Main St. and within 2000 ft. of the nearest Burger King.” Read this article that describes how a company is using GIS to find new restaurant sites. Do you think they care about pinpoint accuracy?
Another GIS app that’s gaining momentum with the general public are predator GIS databases. You can check out Family Watchdog. Plug in your street address and have it perform a search. Do you think positional accuracy is important to users of this service? Having a correct address and other descriptive information is more important than +/- 10 feet positional accuracy.There are many thousands of GIS uses like the above that don’t require pinpoint accuracy. Would it be nice to have pinpoint accuracy in all GIS services? Of course, but financially speaking, it’s not realistic.
The purpose of writing the above is to paint a picture of the scope of GIS. It’s much, much larger than what the average land surveyor is exposed to. It’s not just the part-time GIS technician at the local government office whose life goal seems to be making things difficult for you.
As much as it may offend you (the typical land surveyor) to hear it, you can’t handle GIS. You can equate it to using Microsoft Word or Excel, you might use it daily and use some of its capabilities, but you really only use about 10 percent of what it’s capable of. So, the thought that a GIS professional should be “under the supervision” of an RPLS, from a broad perspective, is ridiculous. I know many RPLS’s and in trying to imagine some of them being in responsible charge of a GIS is an absolutely frightening thought.
Ok, I’m not here to go on an RPLS-bashing tirade. In fact, the properly educated RPLS is vitally important to a GIS. Last Fall, I wrote a column emphasizing the importance of the RPLS and GISP collaborating together. I just want to put it in perspective because I hear from and read about land surveyors who complain about a GIS and about the incompetence of those running it, how land surveyors should be in responsible charge, etc. The fact is that most RPLS aren’t qualified.
On the flip side, I’ve heard of a fair share of part-time (and full-time) GIS technicians who don’t understand the local statutes and who have no problem saying, with the utmost confidence, that “your survey is wrong.” These are the folks who “manage” the parcel database that the RPLS are used to dealing with. Not that this is always the case; in fact, there are many competent GISP, but those are primarily in the densely populated, metropolitan areas where there is a healthy tax base to support a full-time GIS team. Unfortunately, much of the U.S. is comprised of low-density (thus, low tax base) rural areas.
A discussion has been around for many years that promotes the idea of a nationwide parcel database so that the disparity between the quality of the Los Angeles County and Modoc County parcel GIS data is not so large. There’s even a book on the subject called “National Land Parcel Data: A Vision for the Future.” From its description, the book summarizes that “nationally integrated land parcel data is necessary, feasible and affordable.” However, the author goes on to admit that little progress has been made since 1980 when a National Research Council book called for such a national system. Why is that?
Brent Jones (RPLS, PE) is the surveying/engineering/land administration industry manager at ESRI. He recently established a blog discussion on the website Spatialroundtable titled “National Parcel Land Data and Surveyors” and references the aforementioned book. There have been several comments on the blog from reputable industry people. It’s well worth reading the comments.
I contend that, counter to the book’s conclusions, a national parcel database is not affordable…and I’m not talking about funding (necessarily), but culturally unaffordable. Case in point:
Pat the RPLS files a plat with the county. Chris, the county GIS technician, reviews the plat and informs Pat that the boundary doesn’t match the county GIS so it will not be accepted as is. Of course, Pat blows a gasket, then re-checks the plat and verifies it’s correct. Pat then proceeds to educate Chris on the regional statute, thus establishing Pat’s authority. Chris bows and accepts the plat. Pat is fuming on the way back to the office because he doesn’t know who to charge the two hours of time spent educating Chris.
Why does the story end here? I contend that land surveyors have boxed themselves into being short-term minded, extremely short-term minded….not quarterly, like corporate America, but even worse…hourly. How many times have you heard “I billed 110 percent of my hours this week?” spoken like they’ve earned a Bronze Star. Yes, it’s impressive to the boss and he/she may get a nice bonus at the end of the year, but it’s a very short-term attitude and part of the reason that land surveyors are trying to grab the wagging tail of the big GIS dog instead of walking shoulder-to-shoulder down the sidewalk.
I’ve had several RPLS say to me “I’ve been actively looking for GIS work.” Translated: “I’m looking for someone to pay me to provide GIS services that I need to learn.” It’s not that easy. You didn’t get paid to go to school. The same is true here. The RPLS has to invest time into GIS. I’m not talking about just an online GIS course. It needs to be good ol’ OJT (on the job training). If I were Pat, I’d foster the relationship with Chris and have Chris show me how the GIS works, what the procedures are, how the GIS data was created, how the GIS data is updated, what the plan is for updating, what Chris’s departments hot buttons are, how Chris’s budget is funded, etc. I’d even go the point of volunteering to enter some data to get a real feel for how the GIS works. This type of OJT is orders of magnitude more effective than reading a book or taking a class. During this OJT, Pat might also find out that he is weak in some areas important to GIS such as geodesy or database structure and needs to gear up in those areas.
Hmmm… Just think if every RPLS association chapter reached out to its local city or county GIS department and started a collaborative effort to teach each other about the challenges that each faces in their jobs, both as RPLS and GISP. They would educate each other, understand each other better, and ultimately serve each other’s needs more effectively. Too simple-minded? I don’t think so. Which relationship do you think would be more effective when discussing collaborating on a National Parcel Database — meeting the local GIS department manager for the first time or meeting with Chris, with whom you’ve worked on a number of small, local GIS projects and already have a solid understanding of the GIS department needs, processes, strengths, and limitations?
Thanks, and see you next week.
There is so much going on around the world in GNSS applications and developments that when we try to report what’s going on in a particular location, all we can really do is provide a snapshot. Each snapshot is simply a momentary picture captured at a single location — there really could be an entirely different picture around the next bend. However difficult this might be, it’s surely interesting to get a glimpse of things going on elsewhere, and hopefully we can capture some trends and innovations in the process…
In a continent the size of Australia, a country which is connected by so many lines of communication and commerce to so many other GNSS nations, it’s an impossible task to describe everything that’s going on, so I’m going to zoom in on an outfit I’ve known for a number of years and ask them to give me their “GNSS snapshot”.
GPSat in Macleod, Victoria (that’s at the bottom right hand corner of the continent), has been at the GPS game since 1993 and has crossed a number of applications boundaries. From initial OEM product and GNSS simulator representation through integration projects such as RTK container positioning at ports in East Swanson and Port Botany, huge open-pit excavator systems, and all the way to race horse velocity/position tracking systems — GPSat has grown in experience and capability over almost two decades of innovation.
GPSat got so deeply into integration programs that the company now offers not only products and systems, but also GNSS engineering services or as they put it ‘Engineering Turnkey Project’ development. A deal of those projects were connected to the now defunct Australia AirServices Ground-based Regional Augmentation System (GRAS) – Australia’s answer to SBAS and to some extent to GBAS.
While the rest of the world was focusing on satellite-based and ground-based augmentation systems, Australia was stirring up interest in an alternate system that took advantage of a large number of existing ground radio systems used by AirServices for air-traffic communications along the major air-traffic routes. Other countries have similar radio infrastructures and also became interested in the GRAS concept as an alternative to the more expensive satellite GEO broadcast of data. The GRAS system was to use the same principles as SBAS/WAAS, but correction and ionospheric data was to be relayed through the existing network of ground radio stations, uplinking this data using GBAS/LAAS messages to aircraft also equipped and certified for GBAS/LAAS approach and landing. The system design eventually drew support and recognition from the International Civil Aviation Organization (ICAO) and was ready to be prototyped/fielded in Australia, when AirServices unexpectedly pulled the plug.
We won’t dwell here on the reasons that this project ended, rather on the by-products which grew out of years of GPSat’s support to AirServices GRAS program, including large amounts of data collection and processing using WAAS ground reference receivers at test installations at Darwin, Melbourne and in the US.
GPSat developed ground emulations of GRAS ground systems that could also be used for airborne testing. In advance of GRAS ground station fielding, the GVT Emulator provided engineering reference station capability for testing and data collection. The GMMReceiver provides a monitoring and validation tool using the actual VHF data-link and is still suitable for GBAS/LAAS system testing.
GMMReceiver.
GPSat also built a system which bridged PC-based commercial flight simulation applications such as Xplane or FlightSIM to drive a GNSS simulator, so that dynamic, simulated GPS signals are available to “fly” candidate airborne receivers. For anyone in GPS test engineering who has laboriously prepared static simulation scenarios, this could be a real time saver!
So, with the demise of GRAS, where will Australia go for precise enroute and approach navigation? With multiple GNSS constellations coming on line, the required integrity for air traffic management might just be satisfied by multiple constellations when used together. With approximately 30 GPS SVs (all original aviation integrity assessments were based on a Qty 24SV constellation), plus Galileo with GLONASS as a fall back, there might just be enough SVs for internal integrity assessment without external aids. This seems to be worth some investigation.
Now where would GPSat go next with all their technology and capability? “3D spatially aware machines,” you say. Well, I would never have guessed! So if you take GNSS positioning as the core, add inertial to overcome satellite outages, and use gaming software (an extension of the earlier flight simulator applications), add 3D models of the local area including other machine locations, and bring in radio communications between all the machines in the system — well, you have 3D spatially aware machines. Adding yet another twist — connect them all to the Internet via radio links and you can monitor and potentially manipulate these guys from anywhere in the world!
3D-SAM: Spatially aware machine.
This application is initially targeted at open-pit mining, where multiple vehicles and stationary ore/coal moving belts and other machines are constantly at risk of damage from collisions. The system is in use at AngloCoal for stockpile machinery primary navigation and Backup Anti Collision System (BACS).
Meanwhile, AirServices is working actively on GBAS/LAAS for aircraft approach and landing. Quantas has been landing Boeing 737 aircraft and the new giant Airbus-380 using this system at Sydney International Airport since 2006. Update/replacement of the Honeywell SLS-3000 GBAS/LAAS ground system by the US FAA approved SmartPath system is expected shortly.
Automatic Dependent Surveillance Broadcast (ADS-B) is also already operational in Australia too. ADS-B is an air traffic surveillance technology that enables aircraft to be accurately tracked by air traffic controllers and other pilots without the need for conventional radar. ADS-B uses GNSS/INS position transmitted by each aircraft, together with a ground network of radio stations, to acquire and track aircraft and provide controllers with wide area aircraft positional information. Aircraft also communicate with each other to provide pilots with their own situation awareness of other air traffic.
I would be amiss to complete this initial, limited snapshot without mentioning the other major use of GNSS in Australia — in agriculture. A typical farming operation in Australia could be on around 100,000 acres with maybe six rigs working around the clock during planting season, covering 3,000 acres a day. With these huge rigs, and other sprayers, trucks, and utility vehicles, typical fuel usage can top 10,000 liters daily! Automation is how this gets done, and automated agricultural guidance systems abound in Australia. Hemisphere, Trimble, and Beeline all figure highly in typical Australian guidance system installations with local distributors and installers covering major farming centers.
Finaly, there is also Locata in Canberra, an outfit whose LocataLites and LocataNets have drawn attention from some key players — both Leica and Trimble have signed partnerships with the company in recent years. Locata has now figured out how to work with GPS but with a compatible ground-based system working at 2.4GHz in the existing Industrial, Scientific and Medical (ISM) band. With much higher power levels in a non-interfering frequency band and centimeter accuracy, while still working with GPS, this seems to
make for a really suitable potential candidate for GPS back-up in the event of jamming, among many other potential applications. And apparently low-cost dual mode GPS/Locata receivers could already be available. Things are brewing now that I’m not at liberty to discuss, but this erstwhile stealth-mode company will make big noise soon.
So aviation, mining, agriculture, and even potential GPS back-up technology — just a snapshot of some of the sectors for which GNSS forms an essential component in Australia.
Tony Murfin
GNSS Aerospace