The warfighters have spoken. My correspondence lately has been full of questions about tablet and handheld computers. My sources at AT&T and Verizon tell me that the number of iPads in Iraq and Afghanistan have doubled in the last year alone. The problem is that Apple iPads and iPhones, for all their ubiquity, are not rugged in any sense of the word. Enter Handheld US with the Algiz 7.

The warfighters have spoken. My correspondence lately has been full of questions about tablet and handheld computers. Out of every 10 letters or emails, seven contain comments or questions about tablet type or handheld computers.
Ever since the Apple iPad came bursting onto the portable computer scene, everyone else has been trying to produce a competitor. Now that the iPad 2 has bowed, everyone is once again behind the eight ball and struggling to catch up.
My sources at AT&T and Verizon tell me that the number of iPads in Iraq and Afghanistan have doubled in the last year alone. Skype calls are the most frequent way our warfighters stay in touch with their loved ones. Viewing those you care about on a high-definition 10-inch color screen beats a MARS call any day!
The problem, of course, is that Apple iPads and iPhones for all their ubiquity are not rugged in any sense of the word. You can make them more rugged with the excellent line of Otterbox cases I have reviewed in the past, but the fact remains that the iPad and iPhone are still not built from the ground up to be a rugged computing device, no matter how badly we think we treat them in our day-to-day work and commuting environment.
The Swedes at the Gates
Enter Handheld US, an affiliate of Handheld Group AB, a Swedish firm located in Lidkoping, which is a thriving metropolis of about 30,000 hardy inhabitants. Not surprisingly Handheld Group AB and Handheld US specialize in rugged handheld computers, like the Algiz 7, that are designed and built from the ground up for the rugged outdoors, for first responders, and for the military war zone environment.
ROE – Rules of Engagement
As many of my regular readers know, I review rugged military-compatible handheld computers on a regular basis. As with all the rugged computers I review, I put them through a series of torture tests. The ones that fail you never hear about, because I have a policy of never writing a bad review. Why should I waste my time and yours? After all, we both want to know about products that work as advertised, right? I know I do and be assured, BLUF, bottom line up front, the Algiz 7 lives up to its reputation as a rugged handheld or tablet computer that from all reports functions well in rugged military theaters such as Iraq and Afghanistan.
Warfighters
Several of our warfighters are currently using the Algiz 7 as well as many of the other Handheld US derivatives, many of them from companies such as Trimble that are repackaged and resold by Handheld US. To date it has been my experience that as a first responder or warfighter you cannot go wrong with any of the rugged Handheld US computers I have had the pleasure to review.
Torture Tests
As far as my torture tests are concerned, they usually involve lots of water, snow banks, and freezing temperatures, with some mud and ice thrown in for good measure, along with a few drops from several feet onto hard frozen ground. When I looked up Handheld Group AB and found their location in Sweden, it immediately became clear that the Handheld Group AB folks can test their computers the way I do almost any day of the week for a large portion of the year, just by stepping out their front door. Even so, I assiduously ran the Algiz 7 through all the torture tests and it survived admirably. Plus unlike many of the nearly sea-level tests in Sweden, my tests are performed at about 7,000 feet above sea level or higher, more closely resembling the altitudes in parts of Afghanistan.
Specifications
The word Algiz can mean many things, but is usually translated as “elk,” and that is a rugged animal. I see them occasionally in my backyard and they certainly survive in some rugged environments in the Rocky Mountains, so the name is fitting. The Algiz 7 certainly sounds better than the Elk 7.
The Algiz 7 is a rugged handheld Windows 7 computer with integrated GPS capability perfect for today’s warfighters in many respects.
We have been batting the word “rugged” around for some time, and now might be a good time to define exactly what rugged means. I have told you about my unofficial tests that are based on some of the MilSpec (military specifications) standards and their readily available definitions. However, it is interesting to see how Handheld defines rugged. Handheld defines rugged in its literature as pertaining to environmental specifications, of which the three most common and useful are:
- Temperature range,
- MIL-STD-810F/G
- IP
Fortunately for users, these specifications are almost always prominently listed on the product data sheet, but what the heck do they really mean? How do they translate into real-world requirements, especially in battlefield conditions?
The temperature specification defines the operational temperature range of the unit. Working with a unit above or below this specification may well cause the unit to fail when you need it most.
I have defined MIL-STD-810F/G several times in the past, but for all the first-timers, it is a standard issued by the United States Army’s Developmental Test Command. The standard consists of a series of various environmental tests to prove that equipment qualified to the standard will survive in the field. The MIL-STDs (military standards) were originally designed specifically to test military equipment, but are now used to test a wide range of both military and civilian products, including mobile computers with GPS capabilities.
Certainly the letters IP stand for many things in our high-tech world today, but here it stands for Ingress Protection, and an IP rating is used to specify the level of environmental protection of electrical equipment against solids and liquids. In other words, it tells us what amount of a certain size of solids or liquids can get inside the Algiz 7 enclosure and possibly damage the device. For those of you who must know, it is defined by international standard IEC 60529.
The MIL-STD Testing Methods
If you look it up, you will find that MIL-STD-810F/G comprises about 24 laboratory test methods that cover a wide range of environments, from the ability to perform at high altitude (method 500.4 and one I know well) to the ability to survive ballistic shock (method 522). No mobile computer has ever, to my knowledge, been tested to all 24 methods; many of the tests just do not apply to mobile computing, but generally speaking, the more methods tested (and passed), the more rugged the unit.
The most rugged handheld GPS/computer devices (like the Handheld Nautiz X7, which I reviewed in GPS World in April 2010) have been tested on average to between 8 and 10 MIL-STD-810F methods. So when you are evaluating a data or specification sheet, pay close attention to the testing methods that apply to your specific situation. If you are a warfighter in Afghanistan and will be routinely working near or over 10,000 feet of elevation, make sure the unit has been tested to the MIL-STD method that covers that altitude.
If you are going to be working in rapidly changing temperatures, make sure the unit has been tested for temperature extremes and temperature shock. Several of the units I have tested and you have not read about, in one of my columns at least, failed both the temperature and thermal shock tests.
The IP Definitions: What Level Do You Need?
IP ratings are routinely displayed as a two-digit number. The first digit reflects the level of protection against dust (think Afghanistan and Iraq). The second digit reflects the level of protection against liquids, most frequently water or snow (think the mountains of Afghanistan).
Technically speaking, the dust specification has seven different levels, level 0 to level 6, and the water specification has nine different levels, level 0 to level 8. But practically speaking, rugged computers all must have at least a dust protection level of 5 and water protection level of at least 4 or they are simply not rugged in my book. Beware, because there are some computers that list themselves as being rugged that do not meet these minimum IP specifications. I, for one, would be wary of them in adverse environments. Be warned: At the operational ends of the scale, the IP levels can make a huge difference in a device’s ability to operate in severe environments and to a device’s overall longevity. For example, a dust level of 5 means that some dust may get into the device, whereas a level 6 device is completely sealed and dust proof.
For example, an IP65-rated device, such as the Algiz 7, is totally dust proof and is capable of surviving rain showers and dust storms, but not total immersion in water. This device would be an excellent choice in either a very dusty or dirty environment or one where it may be possible to drop the unit in the occasional snow bank. Currently both AORs (areas of responsibility) for our warfighters come to mind. For more complete IP definitions see the Handheld-provided list below:
Ingress Protection
First digit = protection against dust:
0: No protection
1: Protection against solids up to 50 mm
2: Protection against solids up to 12 mm
3: Protection against solids up to 2.5 mm
4: Protection against solids up to 1 mm
5: Protection against dust; limited ingress
6: Totally protected against dust
Second digit = protection against water:
0: No protection
1: Protected against dripping water
2: Protected against dripping water (tilted)
3: Protected against water spray
4: Protected against splashing water
5: Protected against water jets
6: Protected against a nozzle under pressure
7: Protected against immersion (1 meter for 30 min)
8: Protected against submersion (at depth, under pressure)
Rugged Computers for Tough Environments
If you are aware of your requirements, then knowing what the specifications of a particular device are and what they mean can provide invaluable information about how a unit will function in the field and over the long term. So, use the specifications to help you pick out the best unit for your situation. The bottom line for most warfighters is that a rugged computer, even though it may cost a little more up front, is guaranteed to be the most cost effective in the long run and will most probably be there when you need it, such as when your life depends on it. We know that is especially true of rugged computers with built-in GPS capabilities such as the Algiz 7.
I hope, like me, you found the Handheld MIL-STD definitions and explanations helpful, but the question is how does the Algiz 7 really measure up? Handheld defines the Algiz 7 as super-rugged and ultra-mobile, but is that just hyperbole and marketing? Certainly the reports from warfighters that are currently using the Algiz 7 on the battlefield seem to defend the Handled description, but let’s check the specifications.
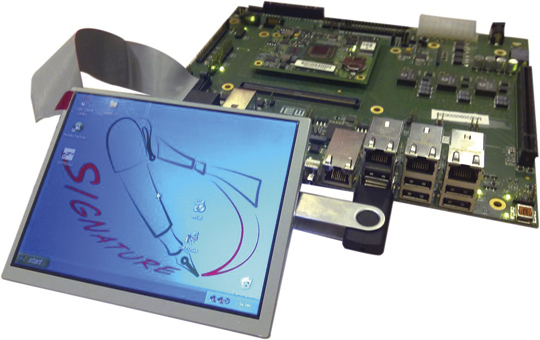
The Algiz 7 sports a seven inch high definition (1024×600) resolution sunlight visible TFT LCD (thin film transistor liquid crystal display) touch color screen in a body that is 5.56″ (144 mm) x 9.5″ (242 mm) x 1.57″ (40 mm) and it weighs in at 2.42 lb (1.1 kg). But how does it measure up to those MIL-STD specifications we mentioned as being the definition of rugged?
Operating: -9.4 °F to 140 °F (-23 °C to 60 °C), MIL-STD-810G
Storage: -40 °F to 158 °F (-40 °C to 70 °C) MIL-STD-810G
Drop: MIL-STD-810G 4ft Drop, Free to Concrete; 26 drops from 4 ft (1.22 m) MIL-STD-810G
Vibration: MIL-STD-810G
Sand & dust: IP65, MIL-STD-810G
Water: IP65, MIL-STD-810G
Humidity: MIL-STD-810G, 90% RH temp cycle 0 °C/70 °C
Altitude: 15.000 ft (4572 m) at 73 °F (5 °C)
As I said, I tend to be tough on equipment that I test, but even I did not drop it 26 times onto a concrete hard surface from a height of four feet. While I have been known to take a unit to the top of Pikes Peak, at a mere 14,100 feet, the temperatures rarely gets to 73 degrees Fahrenheit on top. In fact it is more like 7-10 degrees, and so I may have exceeded the MIL-STD specifications of the unit but with no noticeable affects.
Visibility
I can certainly vouch that the screen is viewable from almost all angles, and it is viewable in bright sun and reflected snow light. It is also viewable while wearing polarized sunglasses, which is a specification you may not see listed, but is critically important in snow country and one for which I always test. In many situations, polarized lenses do funny things to specially treated computer screens. I have seen computer screens that were just not visible or totally disappeared when viewed through polarized lenses. However, the Algiz 7 screen was easily visible, and if you are wearing heavy winter or work gloves, the attached stylus works well. Without gloves your finger is still generally the best stylus, but the screen on the Algiz 7 is capable of clearly portraying very tiny linkable objects, and at those times a stylus is more accurate than even our God-given digits.
More Specifications
The rest of the specifications for the Algiz 7 are as follows:
Processor/memory: Intel Ultra Low Power Atom Z530 1.6 GHz processor (w/ US15W Chipset), 2 GB DDR2 RAM
Data Storage/Disk: 64 GB SSD solid state hard drive
Operating system: Microsoft Windows 7 Ultimate
Screen: 7″ widescreen 1024×600 resolution TFT LCD MaxView sunlight readable resistive touchscreen display
Keyboard/Keypad:
10 keys:
• Power key
• Menu key (Controls Brightness, Volume, Battery Status, WiFi& BT On/Off, and 3G On/Off)
• 4+1 Navigation/directional keys (Left, Right, Up, Down, Center for Enter)
• 3x user programmable hotkey buttons that control up to 6 functions
• On-screen QWERTY soft keyboard
Battery: Hot-swappable Dual Li-Polymer Battery Pack, 2600 mAh each, support minimum 6 hours operation
Connections:
2 x USB 2.0 port (one fully waterproof, even when the latch is open)
1 x 9-pin serial RS-232 port (fully waterproof, even when the latch is open)
1x LAN
1 x DC power port
Input: 120-240 VAC, 50-60 Hz, 12 VDC Output
Docking Connector (Contact Pin Type)
1 x 4 pin docking
Audio Out
1 x Microphone
Audio Integrated (one speaker)
Fully Gobi™ 2000 PCIe module-ready
Communication:
Wireless LAN 802.11 b/g/n
PAN: Integrated Bluetooth v.2.0 + EDR Compliant
Integrated GPS Mediatek, WAAS/EGNOS capable
WWAN (Optional) Gobi 2000 ready, supporting the following RF bands:
• HSDPA/UMTS 800/850/900/1900/2100 MHz
• Quad-band EDGE/GPRS/GSM – 850/900/1800/1900 MHz
• Dual-band EV-DO/CDMA – 800/1900 MHz
Camera: 2 Megapixel Camera + LED light
Using the Algiz 7
I will have to admit that the first time I saw the Algiz 7, I did not think it looked like a very rugged computing device, when in fact it may be one of the most rugged devices I have ever tested. Do not let appearances fool you; this is one very rugged mobile computing device.
Light, Camera, Action
For the warfighter and the first responders, the 2-megapixel forward-facing color camera and the LED light work extremely well. The LED light is very bright and not something you want to have flash or activate if you are working in a clandestine or stealth environment. But when you need it, it is extremely bright and works well. In an emergency it also works well as a flashlight.
Skype and Batteries
I ran Skype on the device with no problems. I once did a single battery hot swap and in the process did not drop the Skype call. I must admit I was impressed. As for battery life, the claimed six hours is a legitimate claim. I saw some days with five-plus hours under intensive work, and some days with seven-plus hours under a lighter load, so the six-hour battery life is the real deal. The dual Lithium Polymer batteries are very light and easy to swap out. For extended operations you will want a couple of spare batteries, and since they are hot swappable you will not lose one byte of data. For those of you with lots of sensors and accessories or the need for an even longer battery life, there is an extended life battery that provides 10-12 hours of service.
Ports
The ports on the Algiz 7 are extensive and all worked well for me. If there is a minor , I would say it is the number of USB 2.0 ports, as there was a time when I had a printer, full-sized keyboard, and some optional sensors connected and was looking for more USB ports. I simply used a USB port multiplier and that worked well, but this is obviously not ideal, especially if your USB devices draw power from the USB port. For most users this may never be a problem, but when you are testing a unit you like to push it to the limit.
Communications
The communications options are also quite extensive. As I said, I used Skype because that is what I had readily available. However, you can use 3G data and communications plans from several carriers as well. And since Verizon and AT&T both have extensive data networks in Iraq and Afghanistan, and there are tons of Wi-Fi sites, communications should never be a problem with the Algiz 7. You can take good-quality photos with the onboard 2-megapixel camera and quickly transfer them using 3G or Wi-Fi communications. Note: As I write this, certification of the Algiz 7 with the Verizon 3G network is still in the works but should be completed any day now.
GPS
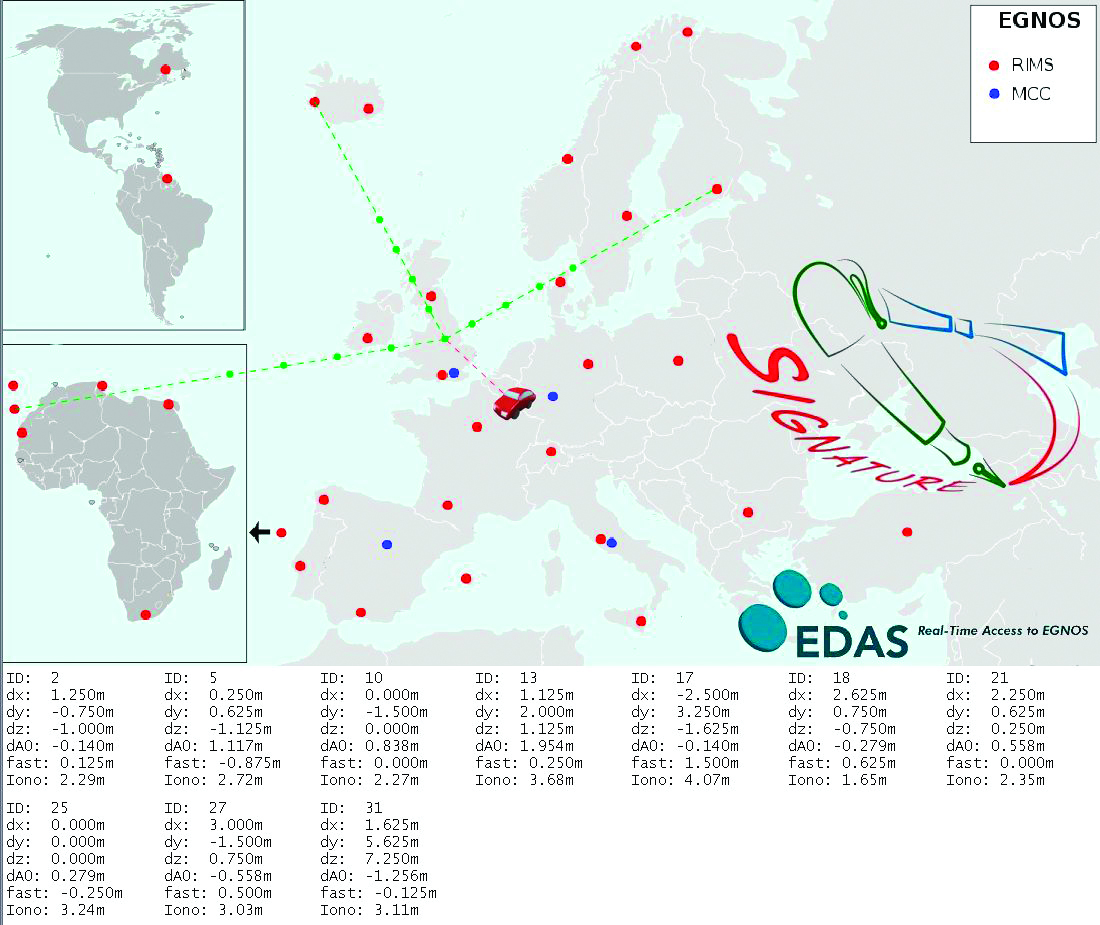
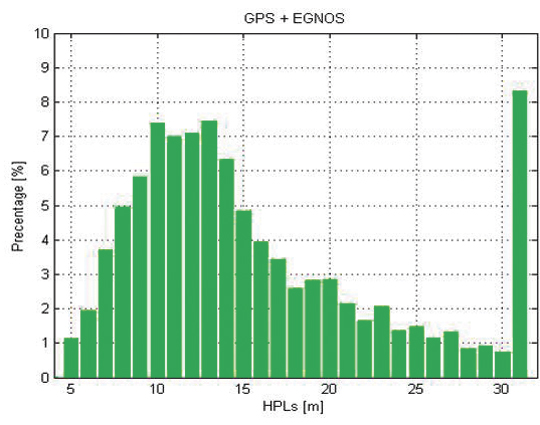
The Algiz 7 has an integrated MediaTek GPS chipset, which is the same chipset that Garmin uses in many of its products. The Algiz 7 GPS is WAAS (Wide Area Augmentation System) and EGNOS (European Geostationary Navigation Overlay Service) capable. Adding the WAAS/EGNOS capability does make a considerable difference where availability, accuracy, and integrity issues are concerned. To most WAAS-enabled GPS devices, the GEO WAAS (Geosynchronous Orbit) signal due to geometry can be the apparent geometric equivalent of three additional GPS satellites in MEO (Medium Earth Orbit). WAAS of course is only available in the geographical area in and around the United States and EGNOS is only available in the European theater.
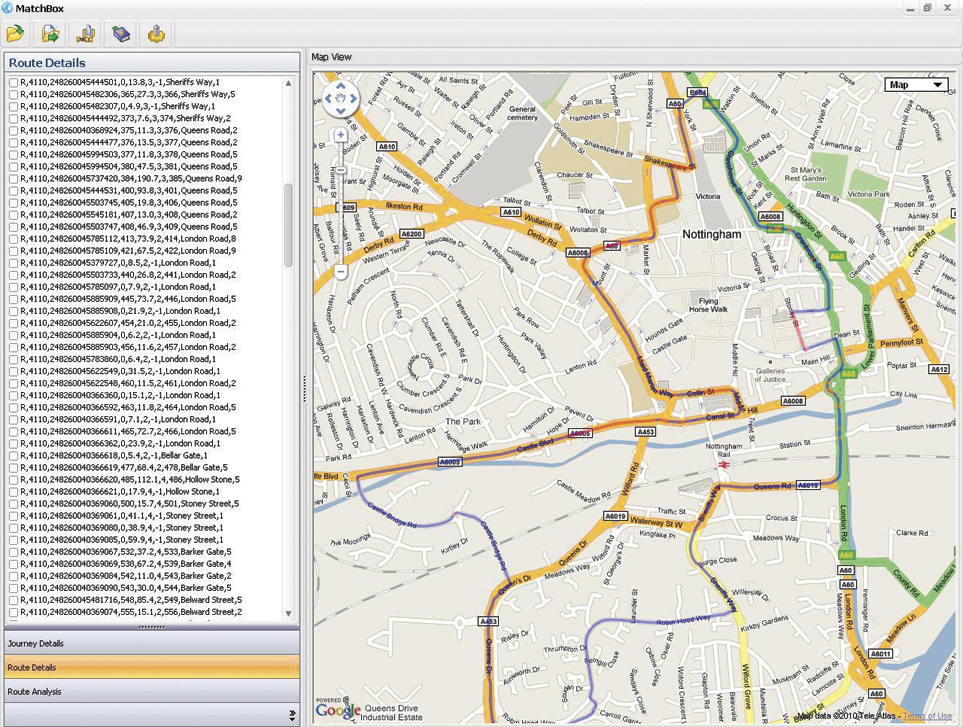
I ran numerous navigation applications, and all the programs I tested found and integrated with the MediaTek GPS chipset output without problems. I tried several different maps and coordinate systems on the Algiz 7 without any significant issues. Not all coordinate and grid systems come as standard fare on the Algiz 7 but they can be found, downloaded, and used without issue.
All in all, I was very impressed with the Algiz 7 as a handheld GPS capable device. Our warfighters should have no problems downloading and utilizing military maps and grid systems on the device. Google maps worked extremely well.
Versatility
While testing the Algiz 7 in the field, I once washed my muddy fingerprints off the screen with a handful of snow and then wiped it with a towel. I never feared I would cause any damage or lose any data because the 10 buttons on the face of the device are all covered and yet are clearly marked and readable. It is difficult to push a button by mistake. It never happened in the several weeks I was testing the device, and that is a big plus for our warfighters, who must frequently put the unit aside and come back to it later, say after a small engagement with the enemy.
So the bottom line is that I am impressed with the Algiz 7, as I am with all the Handheld US products I have tested. I hope more warfighters and military procurement offices give it a shot. They won’t be disappointed.
Until next time, happy navigating.