This year’s European Navigation Conference (April 7–10 in Bordeaux, France) got underway with “Good news from up there .…”
Galileo’s seventh and eighth satellites launched successfully in late March, the European Space Agency (ESA) plans four more satellites to reach orbit in 2015, and space maneuvers for Galileo 5 and 6 have been completed, with a recovery plan currently under study. ESA also happily confirms that satellites 7 and 8 are in good position, under control, and behaving very well.
Fiammetta Diani, deputy head of Market Development for the European GNSS Agency (GSA) followed her keynote opener with “ . . . some good news also from down here.”
 The GSA has just published a new document on the NeQuick Ionospheric Model, used to compensate ionospheric errors on Galileo and other GNSS signals. The document, titled “European GNSS (Galileo) Open Service Ionospheric Correction Algorithm for Galileo Single Frequency Users,” and downloadable, contains detailed description and results from years of intense research.
The GSA has just published a new document on the NeQuick Ionospheric Model, used to compensate ionospheric errors on Galileo and other GNSS signals. The document, titled “European GNSS (Galileo) Open Service Ionospheric Correction Algorithm for Galileo Single Frequency Users,” and downloadable, contains detailed description and results from years of intense research.
Ionospheric Model
The NeQuick model improves accuracy levels globally when using single-frequency services, even during hyperactive periods of the 11-year solar cycle, according to the GSA.
(Last year, authors from the European Space Research and Technology Centre (ESTEC) at the European Space Agency (ESA) published an article in GPS World magazine, “Innovation: the European Way,” as the Innovation column edited by Richard Langley. From Langley’s introduction to the article: “The ionosphere is a dispersive medium for radio signals, so by making measurements simultaneously on two frequencies transmitted by a satellite, most of the effect of the ionosphere can be removed. However, single-frequency devices such as most vehicle navigation and handheld receivers don’t have the luxury of dual-frequency correction. These devices must rely on a single-frequency correction model. The coefficients for such a model are included in the navigation messages transmitted by all GPS satellites. Known as the Ionospheric Correction Algorithm or Klobuchar Algorithm, it removes at least 50 percent of the ionosphere’s effect.
“The Galileo satellites also include the parameters of an ionospheric algorithm, called NeQuick G, in their navigation messages. In this month’s column, the Galileo system design team describes the novel European way for modeling the ionosphere for single-frequency users and compares its performance to the current GPS approach.”
The online version of the Innovation column contains an extensive Further Reading list, including resources on the GPS (Klobuchar) ionospheric model.)
Receivers operating in single-frequency mode may use a single-frequency ionospheric correction algorithm,which is given in the report in the form of two equations, to estimate the ionospheric delay on each satellite link. The Effective Ionisation Level, Az, is determined from three ionospheric coefficients (broadcast within the navigation message) and the Modified Dip Latitude (MODIP) at the location of the user receiver. MODIP is expressed in degrees and a table grid of MODIP values versus geographical location is provided together with NeQuick G model. The receiver then calculates the integrated Slant Total Electron Content along the path using NeQuick G and converts it to slant delay using a stated equation for ionosphere group delay (delay on the pseudo-range or signal code phase), neglecting higher order terms.
A further section of the report describes practical guidelines for the implementation of the single-frequency ionospheric model within Galileo user receivers, with sub-sections detailing:
- Zero-valued coefficients and default Effective Ionisation Level;
- Applicability and coherence of broadcast coefficients;
- Effective Ionisation Level boundaries;
- Integration of NeQuick G into higher level software;
- Computation rate of ionospheric corrections.
In a document annex titled “Performance Results,” the performance of the model is compared with that of the GPS Ionospheric Correction Algorithm (ICA) algorithm, also known as the Klobuchar model.
“As an example of the behavior of the two models as a function of the time of day, the delay computed using Klobuchar and NeQuick G are plotted as a function of the satellite elevation and of UTC in Figure 5. For this example, in order to have a direct comparison between the two models, the delays computed using Klobuchar and NeQuick are compared with respect to the delay estimated using Global Ionospheric Map (GIM). The plots have been computed for a station in latitude [deg] 40.8234, longitude [deg] 14.2161, altitude [m] 122.6590 m, using GPS satellite PRN 11 and for day 16 of year 2010 characterized by quiet geomagnetic activity.”
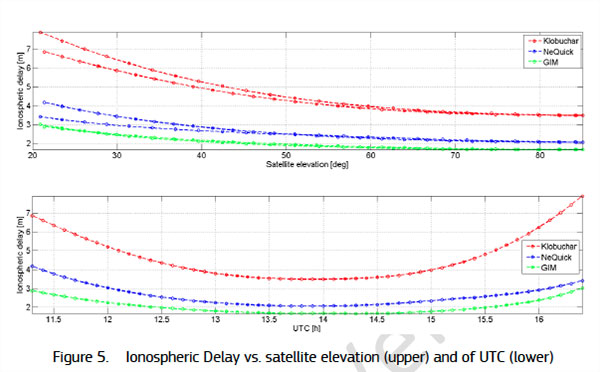
Several further figures and tables within the document annex give more details on the performance results obtained.
The NeQuick electron density model was developed by the Abdus Salam International Center of Theoretical Physics (ICTP) and the University of Graz. The adaptation of NeQuick for Galileo single-frequency ionospheric correction algorithm (NeQuick G) has been performed by the European Space Agency (ESA) involving the original authors and other European ionospheric scientists under various ESA contracts.
GNSS Market
In market forecasts, Diani related some high-level results from the GSA’s 2015 GNSS Market Report. Among other insights, the GSA predicts that the installed base of GNSS devices will triple by 2023, with per capita rates of 2.5 in North America (currently 1.4), and 2.3 in Europe and Russia (now 1.1 and 0.8, respectively). Around the rest of the world, in eight years nearly every person, on average, will possess a GNSS device. Currently rates are 0.5 in South America, 0.2 in Africa, and 0.4 in the Middle East and non-Russian Asia.
Galileo Services: Proposal for an Industry Policy
Axelle Pomies of Galileo Services, an association of industry players active in GNSS applications, stressed the need for a comprehensive, assertive industry policy to support the development of EGNOS/Galileo downstream sector, leading to growth, job creation, and autonomy for Europe.
As stated in her presentation, GNSS market trends do not currently favor Europe, as the continent aggregately currently holds a market share of less than 20%, whereas the usual European market share in other high-tech sectors is around 33%. European GNSS downstream industry suffers from a competitive disadvantage vis-à-vis industry from other regions, because dedicated national programs/strategy in the United States, Russia, China, and Japan support competitiveness of their respective industries and enhance GNSS market take up, including funding from R&D to manufacturing capabilities; regulation; and massive public procurement. Europe has none of these, or at least not to the same degree.
Among the risks this entails for European Union autonomy are that Galileo may not be used as intended; there is little predicted interest for most user applications to track four constellations. Meanwhile GPS, GLONASS and BEIDOU are already in place.
She cited a number of key GNSS application markets where European industry must position itself strongly and securely. In her view, the most promising markets in terms of growth potential and strategic placement include:
- Road (intelligent transport systems, connected vehicles, and advanced driver asisstance systems, or ADAS)
- agriculture
- autonomous/unmanned vehicles
- rail
- timing
- critical infrastructures
- multimodal logistics
- defence
- Internet of Things.
In that regard, Pomies posited the necessity of a comprehensive and assertive industry policy to support the development of EGNOS/Galileo downstream sector, with the goals of fostering the use of European GNSS infrastructures; encouraging European Industry to develop EGNSS equip/apps; fostering the manufacturing of E-GNSS based solutions in Europe; and supporting the European industry competitiveness in the GNSS global market and fostering the emergence of European champions.
Support from European and national institutions is necessary for the full success of the EGNOS programmes, she said, and she previewed the mid-May publication of a draft position paper from Galileo Services in this regard, for wide consultation within the European downstream sector.
Follow www.galileo-services.org for its first appearance.
Key Issues in Intelligent Transport and Location-Based Services
Concluding the ENC plenary, Florence Ghiron of Topos Aquitaine, a regional council of satnav and intelligent transport companies in southwest France, focused on opportunities and risks for small-to-medium enterprises. One of her key points regarding the intelligent transport systems market: the long development paths of public and regulatory policy do not help SMEs grow.
Today, several GNSS-based road schemes are already operational, but they tend to be limited to specific applications, to regional areas and/or to specific classes of vehicles, for example, trucks above a certain weight !
Moreover, each country tends to work with their national champion. This has led to fragmentation of the targeted markets all over Europe. Thus, the need for interoperability between schemes is an increasingly important factor.
Among her major recommendation for supporting application and business development:
Support GNSS stakeholders at promoting their innovative GNSS applications towards the largest possible community. This encompasses:
• Visibility of GNSS mature solutions/applications
• Cost-benefit analyses for already developed GNSS-applications
• Identification of the best ways/means to help SMEs promote their offers towards public purchasers
• Development of a Directory of European regional and national contact points
She further proposed additional funding mechanisms for SMEs to bridge the gap between the R&D step and the industrialization/market development phase.
Finally, help medium/small regions and cities to purchase or procure the innovative GNSS-ITS applications they need to answer their public transportation/mobility needs.
Further information on the Topos project SUNRISE (Strengthening User Networks for Requirement Investigation and Supporting Entrepreneurship), a European project managed by the GSA, may be found at www.topos-aquitaine.org.
Back to Bordeaux in October
Both Diani and Ghiron closed their presentations with invitations to return to Bordeaux in October for the Intelligent Transport Systems World Congress, themed “Towards Intelligent Mobility: Better Use of Space.” GNSS looks to take a more central role than ever in this far-reaching economic segment.