A U.K. government report issued on Jan. 30 looks at the vulnerability of all satellite-based positioning systems: GPS, Galileo, GLONASS, BeiDou, QZSS and more. Issued by the Office of the Government Chief Scientific Adviser, Sir Mark Walport, and informally called the Blackett Report, designating the highest level of government scientific studies, named after a UK physicist who won the 1948 Nobel Prize, the review aims to “lay out the breadth, scale and implications of our reliance on ‘the invisible utility’ mainly in terms of existing critical national infrastructure (CNI).”
“Satellite-derived Time and Position: A Study of Critical Dependencies” states in the forward that it “represents a vital step in understanding the UK’s dependency on GNSS and recommends measures to improve our resilience. Importantly, it also recognises that innovation will be key to realising, fully and safely, the economic and societal benefits offered by GNSS.”
The report points to the fragility of satellite positioning signals which can be affected by cheap jammers, spoofers, weather and interference from other radio signals — among other vulnerabilities. The 86-page PDF document is downloadable here.
The review incorporates the results of a separate but related study, issued in April 2017, looking at the fiscal consequences of a GNSS disruption in. “Economic Impact to the U.K. of a Disruption in GNSS” was briefly summarized in a June 2017 column from this magazine (scroll down to “At What Cost Ignorance?”). The report attempted to quantify the cost of a GNSS disruption, should one occur. The authors came up a figure of 5.2 billion pounds ($6 billion) for a 5-day disruption.
David Last, a UK consultant engineer specializing in radio navigation and communications systems, professor emeritus at the University of Bangor, Wales and past president of the Royal Institute of Navigation, consulted on the June 2017 economic impact report, and was a member of the expert panel and co-author of the January 2018 Blackett Report. He was to have given a presentation on them at the ION International Technical Meeting in Reston, Virginia on January, but could not make the trip. The following materials are drawn from his prepared presentation.
Some of the conclusions from the June 2017 economic impact study are:
There are alternatives to GNSS, specific to each application
However, there is no universally-applicable single alternative for positioning and navigation
Among the most salient needs: higher quality (more expensive) oscillators for timing
“The most applicable mitigation strategies for the largest number of applications are eLoran and Satelles.”
“Omnisense and Locata may be preferred for localised applications that require high levels of accuracy.”
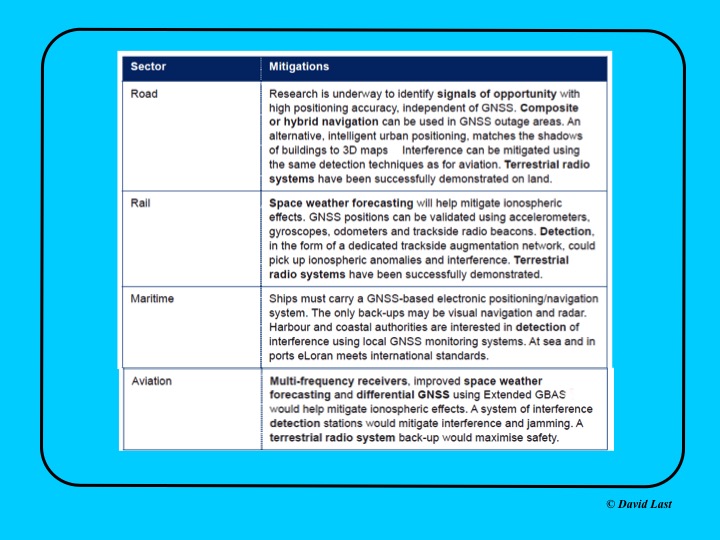
From the just-issued Blackett Report, the first figure displayed above presents recommended mitigations to impacts on GNSS applications in road, rail, maritime and aviation. Alternative options include composite or hybrid navigation, terrestrial radio systems, space weather forecasting, eLoran, various methods of interference detection, multi-frequency receivers and differential GNSS.
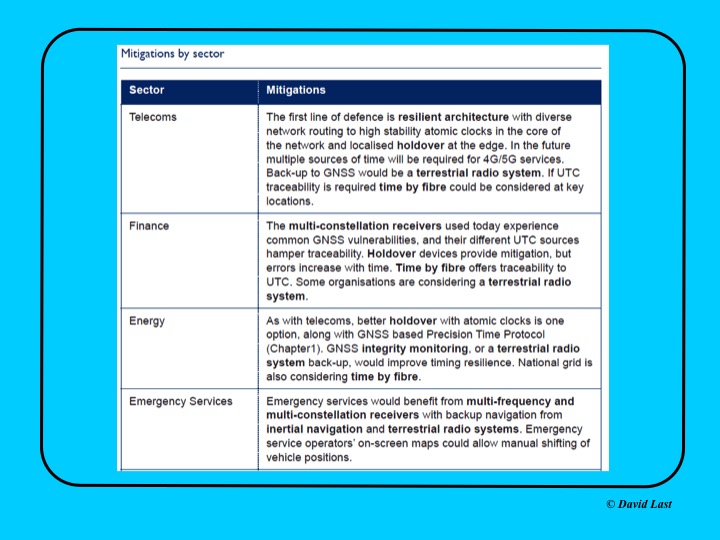
A second figure from Last’s presentation, shown above, covers the mitigations recommended for telecoms, finance, energy, and emergency services sectors. Mitigations for these applications include a resilient architecture with diverse network routing to high-stability atomic clocks, terrestrial radio systems, time-by-fiberoptics, multiconstellation receivers, holdover devices, GNSS integrity monitoring, and inertial navigation.
Concluding recommendations of the Blackett Report:
CNI operators to review and report on their reliance on GNSS. Cabinet Office to assess overall dependence of CNI on GNSS.
Add loss or compromise of GNSS-derived PNT to National Risk Assessment, not just as a dimension of space weather.
In allocating radio spectrum to new services and applications, address the risk of interference to GNSS-dependent users, including CNI.
Review the legality of the sale, ownership and use of devices and software to cause deliberate interference to GNSS receivers or signals.
Assess the need to monitor interference of GNSS at key sites such as ports and share the data with government
Employ GNSS-independent back-up systems.
Cross-government PNT Working Group to report to Cabinet Office on ways to improve national resilience.
Government to facilitate as those procuring GNSS equipment for CNI specify performance standards.
Map PNT testing facilities and explore how industry and critical services can better access them.
Leverage UK academic and industrial expertise in time and geo-location, increasing coordination among existing centres of excellence.
There was plenty for a philosophy major to sink his teeth into at ION’s January workshop on Cognizant Autonomous Systems for Safety Critical Applications (CASSCA).
What is knowledge? What is meaning? What is understanding? What is intelligence? What is learning? What is thinking?
These questions excited Plato and Kant, Buddha and Descartes, perhaps out of intellectual or spiritual curiosity. Who’s to say? But the people asking them now are driven, quite literally, by practicalities. They have come to realize that we cannot ride in driverless cars or fly in pilotless plane-taxis, we cannot live in an autonomous, artificially intelligent environment without knowing a bit more exactly what knowledge is, in this brave new world.
Without thinking about what thinking may be, for a machine.
Why does this matter to a GPS/GNSS/PNT readership? Because as positioning and navigation engage more deeply with artificial intelligence (AI) generally, and with autonomy in particular, these issues emerge as part of the environment that such solutions explore, and in which they must verify and validate themselves.
Welcome to the future, it’s yours. Now think about it.
Culture Club. Some of us may have believed that only technical obstacles remain in the path of a driverless car and an otherwise automated society, salted with a few regulatory wrinkles to iron out. But as build-a-robot R&D projects transform into full commercial partnerships, cultural challenges jump up as well: inertia, instability of requirements, unanticipated expectations, magical thinking (the development of empathetic attitudes towards robots), misplaced trust and misplaced distrust. All this according to Signe Redfield, roboticist and mission manager at the U.S. Naval Research Laboratory.
Joao Hespanha, professor of electrical and computer engineering at the University of California, Santa Barbara, outlined three key concepts for AI development: computation, perception and security. The critical questions for the first named are, how much computing will be done onboard the platform, how much learning will be done onboard, and how much of each process will be distributed to offboard computation. Perception, a crux for autonomy, is closely bound in a feedback loop with control. The platform must gather data to make autonomous decisions (control), and those decisions must maximize the gathering of information (perception).
Amply consider security. All safety-critical systems must provide for — and prevent where possible — decisions based on compromised measurements, which may stem from system or environmnetal noise, sensor faults, hacked sensors, or other corruptions.
Second Wave. We are in the second wave of AI, according to Steven Rogers, senior scientist for sensor fusion at the Air Force Research Laboratory. In the first wave, 60s and 70s, large and complex algorithms, relatively low on data, drove new developments — but they hit real-world problems, hard. Since the mid-80s, we have been in the “classify” stage with relatively simpler programs generating and consuming lots of data. Intense statistical learning will eventually lead to the third wave of AI: Explain.
On a timeline yet to be determined, contextual adaptation will give rise to “explainable” AI, capable of answering unexpected queries. That is, it will have learned how to teach itself.
Some of this stuff gets pretty scary.
Most future knowledge will be machine-generated.
Let’s run through that one more time.
“Most future knowledge on Earth will come from machines extracting it from the environment,” said Rogers. “Machine generation of knowledge is key for autonomy.”
Here’s where the thought processes really started to levitate. “Current sense-making solutions are not keeping pace, not growing as knowledge is growing,” Rogers asserted. And he challenged us with the questions posed at the beginning of this column: in AI, the context we will use to explore much of the future, what is knowledge? What is meaning? And so on.
He gave us one of his answers: “Knowledge is what is used to generate the meaning of the observable for an autonomous system. Correspondingly, machine-generated knowledge is what is used to turn observables into machine-generated meaning.”
Slide from Steven “Cap” Rogers’ presentation at CASSCA.
He suggested a book by George Lakoff and Mark Johnson, Metaphors We Live By. Pretty heady stuff for a room full of engineers. I don’t know about you. I’m headed down to the library to check it out.
Requirements, Simple/Not. We got back to earth with some technical challenges we could actually chew on with David Corman, program manager for Cyber-Physical Systems and Smart and Connected Communities at the National Science Foundation. Seemingly simple requirements for safety-critical applications break down into hundreds of requirements that no one has really thought about, Corman said, as he displayed a chart of “Some Example Research Problems.”
Precision agriculture and environmental monitoring are two sectors where he thought autonomous operations come closest to being full realization, because their operational environments are structurally defined enough. In such constrained niches that we more fully understand, we can implement autonomous operations. Elsewhere, “we don’t know how to specify what we want, so that we get only ‘good results’ and no ‘bad results.’ ”
He identified a looming Cambrian explosion in AI, analogous to that for plants and animas following the dinosaur extinction, in which systems interact, gather data, sense the environment, learn, improve and multiply. He suggested we browse “The Seven Deadly Sins of Predicting the Future of AI,” an essay by Rodney Brooks.
The afternoon’s workshop talks followed, from experts in autonomous flight software, legal and insurance aspects of autonomy, the Ohio State University’s Center for Automotive Research, and the U.S. Department of Transportation. But I tell you, this morning done my brain in.
Before folding up, I must mention a short video on autonomous flying taxis displayed by Paul DeBitetto, VP of software engineering at Top Flight Technologies. It depicts Pop.Up, a modular ground and air passenger vehicle for megacities of the future. Check it out.
The CASSCA workshop was organized and moderated by Zak Kassas, an assistant professor at the University of California, Riverside and director of the Autonomous Systems Perception, Intelligence & Navigation (ASPIN) Laboratory. He is also co-author of two cover stories in GPS World, “LTE cellular steers UAV” and “Opportunity for Accuracy.”
ION president John Raquet expressed the hope that we may see a fully fledged conference on this topic in the near future: CASSCA 2019, perhaps, to join the rotating repertory of ION annual meetings.
Agreed. We need to think more.
Don’t look back, the machines may be gaining on us.
Satellite operator Iridium asked the Federal Communications Commission (FCC) in April 2017 to modify its license to add a new class of ground stations called Certus for expanded terrestrial, maritime and aeronautical operations.
Iridium’s 66-satellite constellation provides, in addition to mobile communications signals, the Satelles time and location service: microsecond timing accuracy and 20- to 50-meter unaided position accuracy worldwide (see the “Innovation” column, July 2017 GPS World).
GPSIA. The GPS Innovation Alliance (GPSIA) commented in September, “GPSIA seeks to ensure that radio navigation satellite service (RNSS) receivers operating in the 1559–1610 MHz band are adequately protected from out-of-band emissions (OOBE) generated from the new Certus mobile Earth station (MES) terminals that will operate on the second-generation Iridium satellite system.
“GPSIA and Iridium are actively engaged in constructive discussions regarding the adequacy of that protection, but no final resolution has yet been reached. [….]
“In the unlikely event that GPSIA is unable to reach an agreement with Iridium, it asks the commission to impose limitations on the operation of Certus terminal devices to protect GPS/RNSS operations in the 1559–1610 MHz band at a level equivalent to what terrestrial terminals in the same and other frequency ranges provide at –95 dBW/MHz.”
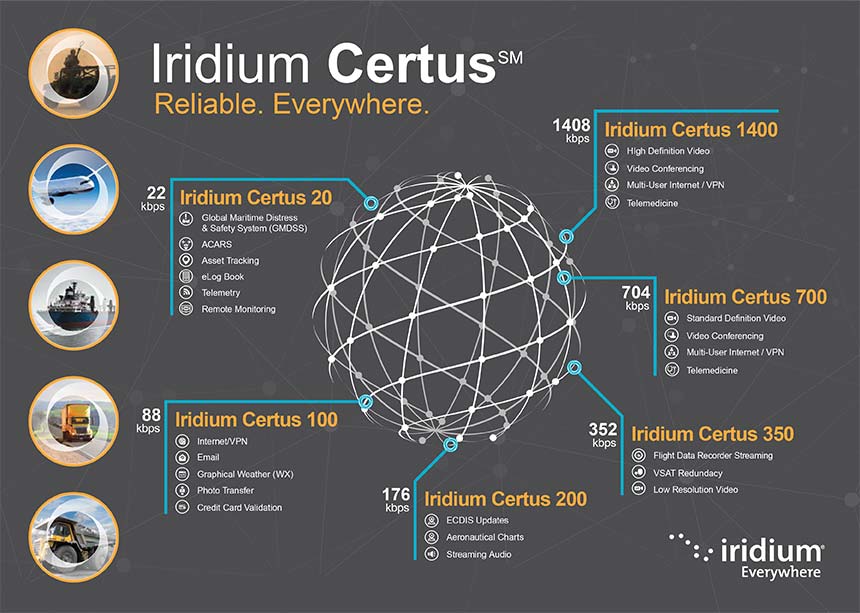
Iridium Certus infographic.
Hexagon. Hexagon, the parent company of GPS manufacturer NovAtel, commented on Jan. 8, “Certain statements in the modification application regarding output power and amount of terminals to be deployed cause great concern regarding the unimpeded operation of radio navigation satellite service (RNSS) receivers. The application does not include enough information to simulate the impact properly.
“Hexagon politely requests that the FCC will exercise the same due diligence [as] during previous modification applications close to the RNSS bands (for example docket 11-109) and establish a technical working group or a similar testing process that ensures unimpeded coexistence of the modified Iridium terminals with the established RNSS systems.”
Documents related to the case can be found here, on the FCC International Bureau website.
It is the best of times, it is the worst of times. GPS modernization, once gasping for breath by the side of the track, is back in the race and pulling ahead. Relentless innovation in user equipment and newly opened software access mean that high-precision positioning may soon be available to owners of mere tablet computers. Spoofing counter-measures are growing in sophistication and availability. GPS continues to drive many sectors of the economy, with a benefit of as much as $65 billion per day to the U.S.
Yet there are a few flies in the modernization ointment. And GPS may soon collide, catastrophically, with that other U.S. military invention from the 1970s that also leaped the fence into the civic domain and life-changed billions of people around the world: the Internet.
Note: After this issue, we are temporarily suspending publication of the GNSS Design & Test e-newsletter. Subscribers who do not already receive the Navigate! Weekly e-newsletter will in 2018 find it in their inbox each Tuesday. Navigate! covers a broad range of GNSS and PNT industry news and all GNSS constellation and signal updates. You may freely unsubscribe if you wish. The final Navigate! newsletter of each month will carry my GNSS Design & Test column — so, I’m not going away!
— AC
Let’s open these boxes one by one.
Modernization. The first satellite GPS III satellite, declared available for launch in September, appears headed for a March 2018 lift-off. Both the GPS III digital navigation payload and the ground-control software programs are recovering momentum following earlier hiccups and delays. The first III satellite has successfully “talked” with the OCX system on the ground. Lockheed Marting is building 10 of the satellites for the Air Force. Harris Corporation delivered the fourth of 10 digital payloads to Lockheed, and said it would ship four more in 2018. Raytheon is the prime contractor for OCX.
The Government Accountability Office (GAO) projected that the current constellation of 31 GPS II satellites will remain operational until 2021, two years longer than previously estimated. This affords some breathing room for the seven GPS III satellites scheduled to be in orbit by then to start replacing the long-lived II generation. No longer need we fear the constellation gap, an alarm sounded by the same GAO back in 2009.
Problems Ahead. But this year’s GAO report also warns that GPS III’s increasing program complexity and upgrades required for new encrypted signals mean that it will take longer for ground infrastructure and user equipment to catch up in capability afforded by the new satellites.
Five programs are now encompassed under the rubric of GPS modernization: the satellites, next-generation ground control (OCX), military user equipment, contingency operations and military code (M-code) early use.
Just because the satellite schedule has regained its footing and is racing forward does not mean that M-code software and installing the receivers needed to acquire it aboard major U.S. weapon systems are keeping up pace with the pack. “Additional development is necessary to make M-code work with over 700 weapon systems that require it,” according to GAO analyst Christina Chaplain. Long message short: the new satellite constellation may be orbiting in the skies years before user equipment and software are in place. “War fighters will have to operate with a mix of older and newer receiver cards.”
Consumer Access to Precision. The January cover story in GPS World magazine will show the results of very promising new tests taking advantage of access to raw GNSS observables now possible thanks to Android. “For those who want high accuracy, but don’t need it full time, high-productivity dedicated professional solutions may not be cost-justified,” writes Stuart Riley along with his co-authors, all from Trimble. “In these cases, a positioning-as-a-service subscription could offer a viable use model. Achieving precision positioning with just a standard mobile device, a correction stream using the mobile device’s data connection and a high-accuracy positioning application produces a very low barrier to achieving high accuracy.”
One of the figures from “Positioning with Android.” Code RTX performance the dataset sampled Nov 20 and corresponding RTK and RTX phase solutions — cell-phone GNSS antenna.
“While we expect that dedicated system approaches employing a custom GNSS chipset and firmware and purpose-built precision applications will continue to be the right solution for industry professionals,” they continue, “it is clear that the ubiquity of consumer mobiles, with increasing compute power, ruggedness and an expanding feature set represents a fertile ground for new development of improved positioning systems that don’t have strict professional requirements.
“A range of new use models and applications will be enabled by consumer mobile phones with technology that improves positioning performance. The goal of the work presented here is to assess what level of performance can be achieved by using proprietary PVT (Position Velocity Time) engine(s) utilizing GNSS measurements from the Android GNSS measurement API.”
Look for the January issue in your mailbox by mid-next month.
Spoofing. This has been the hottest issue, by far, during the past year — maybe two — at technical conferences around the world. Its role has been speculated in some rather notorious seafaring accidents. Its potential to wreck many carefully wrought schemes of transport, finance, safety, security, defense, power supply and more has been resoundingly aired. But help is on the way. Javad Ashjaee in the January magazine’s Expert Opinion column lays out an anti-spoofing strategy that has been installed, as an option, in all OEM boards offered by JAVAD GNSS.
In its most basic form, it amounts to “it is vital that in areas that spoofing danger exists, users employ OEM boards that provide more satellite systems and more signals, rather than using a simple GPS C/A code, for example.”
Heartbreak Dead Ahead. Finally, the January issue contains a lengthy treatise by Brad Parkinson, variously the grandfather, godfather, or just plain father of GPS, on a burgeoning danger that threatens the whole system and the vast economic benefit it provides.
Widespread big data streaming, storage in the cloud, and the much-ballyhooed Internet-of-Things are accelerating the World Wide Web’s breakneck consumption of broadband. More, more, more is needed, and more again tomorrow. We are all complicit, to use a current term, in this.
Every single sliver of radio-frequency band is now worth billions. And this is neither an infinite nor a renewable resource. There’s only so much. No one’s talking about taking away the small radionav portion of the spectrum (yet), but serious, well-funded and well-friended efforts seek to park massive transmitters right next door to it and effectively obliterate the signal, not only of GPS but other GNSS as well.
LightSquared tried this once, in 2010-11, and failed. Now the company is back under a new name, and in the current political climate it has more than a fighting chance of knocking the RF legs out from under the PNT community and all who depend upon it. Which, again, is all of us.
Talk about conflicting priorities.
“I believe the concept of allowing the installation of transmitting towers that, by design, will interfere with normal GPS use at some distance away, opens the door to tacit approval of short-range (or not-so-short-range) GPS jammers,” writes Parkinson.
Well, let’s put all that trouble aside, just for a few more weeks. Enjoy, everyone out there, your winter holidays if you are lucky enough to have some, and we’ll return to business in January.
Views from the top drive this issue of the magazine: personal essays from the directing officers and/or architects of each global satnav system.
The plots of the four articles are the same: what innovations were accomplished in 2017, and what new features to look for in 2018. But the themes differ. If you reflect at the end of each article, try to read between the lines, divine what message seems most important to the author — then distinctions surface.
I’m not suggesting that the directors of each satnav system are trying to accomplish different things. All share the goal of providing the highest quality product and service. I posit that the hands above these guiding hands, atop the top — that is, the national governments paying for each system and directing the directors — do indeed have different priorities. These priorities may produce differing results for industry, markets and users.
The column in November’s GNSS Design & Test e-newsletter elaborates on this hypothesis, as there’s not sufficient space here. Hyper-briefly: the most marked contrast appears between the United States on the one hand and Europe and China on the other. The former appears focused on maintaining the Gold Standard of signals, on beefing up security, and then pretty much letting the market take care of innovation once the space signal hits the Earth’s surface. The other two project clear messages of working closely with industry sectors to encourage and intensify use. For them, GNSS is an economic tool, not merely a political one.
As for my 2018, I will attend both events below, and hope to talk with as many readers as possible there.
Cognizant Autonomous Systems for Safety-Critical Applications Workshop
January 29, 2018 Reston, Virginia
Join a full day of expert presentations and discussions on the opportunities and challenges (technical, commercial, ethical and legal) associated with developing fully autonomous systems that are cognizant and trustworthy for safety-critical applications. Free; sponsored by the Institute of Navigation. Speakers from the National Science Foundation, Department of Transportation, Air Force Research Laboratory, Top Flight Technologies, University of California-Santa Barbara, Santa Clara University, The Ohio State University and more. View more details here.
Munich Satellite Navigation Summit: GNSS — The key to autonomy?
March 5–7, 2018 Munich, Germany
This three-day international conference focuses on the latest developments in satellite-based navigation, gathering high-ranking speakers from industry, science and governments for a broad overview and differing perspectives. Topics include status and real-world results of Galileo; modernization of GPS, GLONASS and BeiDou; developments of QZSS and NavIC; the need for GNSS authentication; civil use of Galileo Public Regulated Service; legal aspects of GNSS; and autonomy within a single GNSS — still possible? Get more details here.
The U.S. Supreme Court heard arguments last week on a case that could determine whether authorities can search cellphone location data without a warrant.
In Carpenter v. U.S., the Court will eventually rule on whether the Fourth Amendment of the U.S. Constitution’s Bill of Rights, enacted in 1791 to safeguard citizens’ rights against unreasonable searches and seizures, extends to cover personal cellphone records tracking user location.
The case began when police used records, obtained from a phone company and drawing on cell-tower location, to show that an individual’s cellphone was used in the vicinity of several armed robberies in Michigan and Ohio in 2010 and 2011.
The appellants contend that the government had violated the Fourth Amendment when it collected their cellphone location records without a warrant. A federal appeals court ruled against the appeal, finding the Fourth Amendment doesn’t “yet” extend to cellphone location data.
That court distinguished between the “content” of a communication and the “information necessary to send it.” The government can’t read letters or emails or listen to wiretapped conversation without a warrant, but it is entitled to the metadata used to send such content — in this case the phone company data showing in which tower’s cell area the phone was activated.
“The business records here fall on the unprotected side of this line. Those records say nothing about the content of any calls,” the court ruled. “Instead the records include routing information, which the wireless providers gathered in the ordinary course of business.”
The Supreme Court, in hearing the appeal on this decision, is expected to review — and possibly revise — its heretofore opinion that when users share information with a third party, such as a bank or telephone company, they lose the expectation that it will remain private. At question is whether cellphones have activated a new era of privacy expectations, in essence, whether legal doctrine needs to be subject to updates for the digital age.
One tenet that no one questions is that cell phone users have no idea to what extent their phone companies know where they go and how long they stay there. Whether they care or not, or whether they are willing to sacrifice some amount of privacy for the convenience of cell phone access, remains to be seen. The limits for this have been explored but never completely settled, in controversies around Facebook’s (and others’) access to and use of customer data and profiles.
Apple, Facebook, Google and Verizon have all filed an amicus (“friend of the court”) brief in Carpenter v. U.S. The tech gargantua seem to want, on the one hand, to discourage the possibility of government and law enforcement being able to access location data without a warrant, while also maintaining a clear and unencumbered route for themselves to use it. They argue that “Fourth Amendment doctrine must adapt to the changing realities of the digital era” and that “rigid analog-era rules should yield to consideration of reasonable expectations of privacy in the digital age.”
After a related 2012 Supreme Court decision that attaching a GPS tracker to a car without a search warrant violated the Fourth Amendment, Justice Sonia Sotomayor wrote that the so-called third-party doctrine was “ill suited to the digital age” and that privacy case law should adapt to changes in society’s views that are occurring thanks to smartphones and other technology.
For a summary of the arguments presented to the Court on November 29 in Carpenter v. U.S., see the SCOTUS blog here. Further developments in the case will appear on this page, and viewers may sign up for push updates as well.
In 2008, GPS World published an editorial on this subject, in the guise of a parodized future film noir scenario, “The Call Tease Factor.” An expandable image appears at left. The essay opined that “Government agencies and police routinely tracked cell users’ location without a warrant or court oversight. . . . Challenges had faltered, and no one seemed to notice any more, or care much.”
“Privacy, as least as far as location, no longer existed.”
Spoofing — the generation of false and misleading GPS signals by “bad actors” — is becoming an increasing problem for all GPS users, and surveyors just as much as everyone else should be knowledgable and take countermeasures.
Javad GNSS has announced that spoofer detection is now available on all of its OEM boards. If the receivers equipped with such boards detect more than one correlation peak for any PRN code, they warn the user of the presence of spoofing (false signals) and identify the spoofed satellites.
The receivers then switch to other signals and sensors that are not being spoofed, to maintain accurate positioning. The user can also employ the receiver to try to identify the direction from which the spoofing signals are originating.
We just went to press with the December issue of GPS World magazine, its cover story consisting of personal essays from the directing officers and architects of each global satnav system.
You’ll have to wait for your copy to arrive in the mail or the digital edition to land in your inbox to read those articles in full, but I’ll give you a sneak preview here — just enough to springboard my hypothesis that, yes, system operators build great systems, but they are still subject to the whims of their national governments.
And those governments are operating on increasingly divergent agendas that will bring consequences upon the respective GNSS industries.
The plots of the four articles by the effective CEOs of each GNSS are the same: what innovations were accomplished in 2017, and what new features to look for in 2018. But the themes differ. If you reflect at the end of each article, try to read between the lines, divine what message seems most important to the author — then distinctions surface.
In our December pages we hear from:
Col. Steve Whitney
Col. Steven Whitney, Director, Global Positioning Systems Directorate:
“The Air Force is already exploring new, emerging technologies and capabilities to even further advance the robustness of the GPS enterprise, with the vision that GPS will always remain the Gold Standard for the worldwide PNT community.”
Sergey Karutin, GLONASS designer general; Nicolay Testoedov, Director General, SC Information Satellite Systems; and Andrey Tulin, Director General, SC Russian Space Systems:
“The traditional GLONASS conception of signal-in-space accuracy is now being augmented by the user level performance estimation. Due to the fact that the signal propagation environment contributes a lot to the positioning error budget, it is obvious that users need information that would reduce the influence of signal propagation path on the positioning accuracy.”
From left: Sergey Karutin, Nicolay Testoedov and Andrey TulinPaul Verhoef
Paul Verhoef, Director of the Galileo Programme and Navigation-related Activities, European Space Agency:
“The world of mobile-device LBS is going to change in 2018, and it will be due to the availability of Galileo. It will not be the first time the partnership of ESA, the European Commission (EC) and the GSA has made a service available that has changed the nature of the marketplace. “
Changfeng Yang, Chief Architect of BeiDou Navigation Satellite System:
“BDS-related products have gained access to the markets of more than 70 countries and regions, more than 30 of which are along the (land-based) Belt and (maritime) Road (in line with the Belt and Road Initiative). Through joint applications with other compatible navigation satellite systems, BDS provides global users with diversified choices for better application experience.”
Changfeng Yang
I’m not suggesting that the directors of each satnav system are trying to accomplish different things. All share the goal of providing the highest quality product and service. I posit that the hands above these guiding hands, atop the top — that is, the national governments paying for each system and directing the directors — do indeed have different priorities. Accuracy is not all that matters on the international scene, taken as a whole. Sound economies, vigorous markets, vibrant technologies, tradeable-upon intellectual property and highly trained corps of engineers all count for as much.
The respective governments’ priorities, which encompass much more than GNSS but surely have an effect upon it, may produce differing results for industry, markets and users. In that light I would bring to your attention a November 14 op-ed column by Thomas Friedman in the New York Times. I’ll return to this in a moment.
The most marked contrast in the “theme” or GNSS subtext of our December essays appears between the United States on the one hand and Europe and China on the other.
GPS appears focused on maintaining the Gold Standard of signals and on beefing up security, particularly for the military. Innovations such as the L2C signal, drawn up with significant if not predominant civil-sector input, will bring important growth and expansion of capabilities. But aside from that, it appears that industry can be left to itself to take care of innovation once the space signal hits the Earth’s surface.
GLONASS communicates a desire to burnish its reputation for accuracy and relevance. Once pre-eminently second among GNSS, it need to bootstrap itself back into competition to secure its increasingly tenuous toeholds in foreign markets.
Galileo and BeiDou project clear messages of working closely with industry sectors to encourage and intensify use. For the governments of Europe and China, GNSS is an economic tool, not merely a political one.
Now for Friedman’s thoughts on the international scene, quickly excerpted in their most relevant glimpses on the GNSS landscape:
“We’re going through a change in the “climate” of globalization: from an interconnected world to an interdependent one; from a world of walls, where you build your wealth by hoarding resources, to a world of webs, where you thrive by connecting your citizens to the most flows of ideas, trade, innovation and education.”
[….]
“In response to a more interdependent world, China is deepening its trade ties to all the fast-growing Asian markets around it through its “One Belt, One Road” project.”
[….]
“China has embarked on a plan called “Made in China 2025” that’s plowing government funds and research into commercializing 10 strategic industries while creating regulations and swiping intellectual property from abroad to make them all grow faster. These industries include electric vehicles, new materials, artificial intelligence, integrated circuits, biopharmacy, quantum computing, 5G mobile communications, and robotics.”
The European Union is actively and aggressively pursuing many projects and mandates similar to those underway in China.
The U.S., not so much. Not even near. In an environment in which it currently imports engineers to fill yawning vacancies in its high-tech work force, how long before it is reduced to importing technology as well, and at what cost?
Hope to See You There. In early of 2018, I will attend both events below, and look forward to talking with as many readers as possible at each event.
Join a full day of expert presentations and discussions on the opportunities and challenges (technical, commercial, ethical and legal) associated with developing fully autonomous systems that are cognizant and trustworthy for safety-critical applications. Free; sponsored by the Institute of Navigation. Speakers from the National Science Foundation, Department of Transportation, Air Force Research Laboratory, Top Flight Technologies, University of California-Santa Barbara, Santa Clara University, The Ohio State University and more.
This three-day international conference focuses on the latest developments in satellite-based navigation, gathering high-ranking speakers from industry, science and governments for a broad overview and differing perspectives. Topics include status and real-world results of Galileo; modernization of GPS, GLONASS and BeiDou; developments of QZSS and NavIC; the need for GNSS authentication; civil use of Galileo Public Regulated Service; legal aspects of GNSS; and autonomy within a single GNSS — still possible?
Shortly after GPS World’s 2017 Leadership Awards ceremony during ION GNSS+ week, the Institute of Navigation rolled out its own distinguished panel of award recipients at a conference luncheon.
ION’s Satellite Division presented Terry Moore with the Johannes Kepler Award, its highest honor. It is perhaps a bit of editorial license to call Terry Moore “one of our own,” but he has been an advisor to the magazine for lo, these 17 years or more. During that time his technical papers have formed the basis for several feature articles, and he has guided many of his students and colleagues to authorship in these pages.
Director of the Nottingham Geospatial Institute (NGI) at the University of Nottingham, where he has long served as professor and dean, he is also a consultant and advisor to European and UK government organizations and industry. He did extensive work on the introduction and implementation of WGS 84 as the standard reference system for air and marine navigation, developed software tools for coordinate transformations and map projections, and pioneered the use of raw GPS code- and carrier-phase data from low-cost receivers.
He is the founding director of the GNSS Research and Applications Centre of Excellence, which targets knowledge transfer between the NGI and business. He has a long career of volunteer service for both ION and the Royal Institute of Navigation. In this as in other things he exemplifies the best of the scientific community, or of any community for that matter.
Among his articles for the magazine are “Not Just a Fairy Tale: A Hansel and Gretel Approach to Cooperative Vehicle Positioning,” 2014; “Network RTK for Intelligent Vehicles,” 2013; “Aiding Indoor Pedestrian Navigation with Building Heading,” 2011; “Integrating Computer Vision and Inertial Navigation for Pedestrian Navigation,” 2011; “Assessing Network RTK Wireless Delivery,” 2009; “Ubiquitous Positioning: Anyone, Anything: Anytime, Anywhere,” 2007; and “Simulation GPS in Urban Traffic Environments,” 2005.
I was privileged to serve as in-house editor for many if not all of these articles. A learning experience that could have been more so had I applied myself harder. Story of my life.
Nowhere to be found in the curriculum vitae of this Ph.D. in space geodesy are his performance as Commander Bond in “GNSS Murder, Mystery and Mayhem at the Mansion,” where he drank a mean martini, shaken not stirred, nor his regular appearances as vocalist at the NavtechGPS Open Mic Night, most recently dueting on “Paradise by the Dashboard Lights.”
All of us at the magazine join in congratulating Terry on this well-deserved honor!
“Prepare for Tomorrow: Find Vulnerabilities Today” was the title of our wide-ranging webinar in July that focused on GNSS signal simulation for jamming and spoofing scenarios. We did not have time to address all the questions posed by the audience, so we return to them here.
Q: While testing receivers, realistic scenarios for jamming and spoofing are very important. What is the typical approach to set the number of interference sources, their type and main signal parameters?
Two different approaches are common, those involving the use of an anechoic chamber and those which are lab-based. Each approach has its limitations and merits. Each approach must address the number of significant interferers, their signal powers and the waveforms of the interference signals. Each must also consider the geometric arrangement of these interferers relative to the antenna under test and relative to the simulated constellations under test.
Changes in signal phase, signal Doppler and signal power are as important for the interference signals as they for the wanted GNSS signals. These changes are caused by the simulated motion of the vehicle and potentially the motion of the interferers. These changes should also include the impact of terrain surrounding the vehicle and the interferers, and also the gain and phase patterns of the receive antenna on the vehicle and the transmit antennas on the interferers. Some interferers might be discounted from the significant set due to their signals being masked from the vehicle by the terrain or antenna patterns or by them being too far from the vehicle to have an impact. These interference signals may become significant as the scenario progresses due to vehicle or interferer motion.
Simulator graphical user interface. (Image: Spirent Federal Systems)
Q: In GNSS navigation systems for commercial applications, what emphasis of design effort should be on anti-jamming/anti-spoofing over improving the navigation accuracy?
Commercial applications is a broad area, so it will depend on the particular application as to whether it needs more accuracy or more resiliency against AJ/AS, but in general, the accuracy of GNSS is fairly mature. Standard GNSS offers accuracies on the order of ~1 meter. Centimeter accuracy can be achieved with differential or real-time kinematic (RTK). Multi-constellation use can increase availability in areas with limited sky view such as urban canyons. Multi-frequency can aid in the reduction of multipath and improve accuracy. If the application needs accuracy, these features are readily available.
However, integrity and resiliency are growing needs in commercial applications, especially ones that are in critical operations. Much more can be done to detect jamming and spoofing than what is in standards GNSS receivers today. In our systems, we include an additional software layer called BroadShield, which monitors internal state variables of the receiver, and will alarm on detection. Additional sensors combined with the GNSS receiver such as an inertial measurement unit (IMU), magnetometer, odometer, or even the much stronger Satellite Time and Location (STL) signal offer augmentation during periods of GNSS denial, or in the case of spoofing, authentication of the navigation solution.
While both jamming and spoofing are intentional attacks, they are highly different in their set-up and serve very different purposes. Due to their simplicity, most jamming attacks can be mitigated thanks to adaptive filtering or pulse blanking. On the other hand, spoofing is a malicious attack, highly complicated, and requires knowledge of the GNSS signal structure as well as precise timing and positioning.
The question is thus whether one should emphasize navigation accuracy over the ability to output a position (jamming case) or the possibility to output a completely erroneous position (spoofing case). The answer lies, obviously, in the end application and the coupling of GNSS receivers with other systems. High-precision non-life-critical applications should emphasize navigation accuracy while implementing simple jammer filtering strategies. Life-critical applications, being often coupled with other systems, should ensure the reliability of the solution even if that means being unable to compute a position due potential threats.
Q: Do you have GPS/inertial navigation system (INS) test capabilities?
The CAST-3000 EGI integration system produces GPS RF signals commensurate with simulated IMU sensor data to provide repeatable testing in the integration laboratory for a wide range of military and government applications.
CAST GNSS/INS simulators generate high-fidelity signals required for emulating the legacy GPS signals as well as those used by next-generation navigation technologies. This is because our sole business focus is supplying GNSS simulators, GNSS/INS test equipment, and GNSS/INS support services to government and military avionics laboratories, prime contractors, and GNSS receiver manufacturers. For 35 years we have provided off-the-shelf products to both the government and U.S. major defense contractors.
CAST EGI integration tools are used by Northrop Grumman and Honeywell and are now also being used in integration laboratories worldwide. Our equipment supports system integration in major weapons platform labs and development at major military contractor labs. CAST simulators produce high-quality, accurate signals that are used in government, military and commercial labs around the globe.
Our NCS TITAN GNSS simulator is able to emulate the presence of IMUs and micro electro-mechanical systems (MEMS) sensors with the optional available real-time IMU/Sensor Emulation Package (SEP). The SEP upgrades the TITAN to support the simulation of inertial sensors, which nowadays are implemented as MEMS, among others, and of other common aiding sensors. To obtain more accurate positioning for location-based services and navigation, GNSS chipset and receiver manufacturers as well as system integrators combine more and more GNSS navigation with such sensor fusion or signals of opportunity.
The optional SEP enables controlled and progressive testing of sensor-fusion algorithms when used with NCS Control Center operating software. This software supplies the SEP with an internally- or externally-generated center-of-gravity (CoG) trajectory for the device under test.
The various sensor models to be emulated by the SEP run within the Control Center software. The device under test (vehicle) input trajectory at the CoG passes through the sensor model, which in turn generates the appropriate sensor output, by taking into account the corresponding error model for each sensor defined.
We have added the capability to emulate INS/IMU data in addition to GNSS signals to our Constellator simulator, to offer to the customers a complete testing platform. Constellator can simulate up to six gyrometers and six accelerometers. The attitude of each sensor is defined with respect to the vehicle axes. Deterministic errors can be configured to simulate the axis misalignment and scale factors, and biases can be defined in order to simulate realistic sensors. Stochastic error models are also available such as random walk or Gauss-Markov models for each sensor (gyrometer or accelerometer) to improve the sensor emulation fidelity.
Q: Do you have detailed scenarios for jamming and spoofing in timing use of GNSS receivers, that is, involving time synchronization for telecommunications companies?
The simulated jammer’s signal specification must be very flexible in order to faithfully simulate real-world jamming events. For example, the jammer’s spectral shape should be flexible enough to simulate a Blue Force electronic attack (BFEA) on a GNSS receiver.
Also, the simulator should be able to simulate dynamic scenarios by varying the power of the jammers as a function of their trajectories and as a function of different antenna patterns.
Sometimes when testing receivers, the simulated jammers should replicate pre-recorded waveforms from real world. The ability to play back the pre-recorded IQ-baseband signal in conjunction with GNSS signals is another powerful feature of a simulator. Simulation of spoofing attacks on a GNSS timing receiver is only possible when the GNSS simulator provides fine-grained control of transmitted signal. This includes controlling the offsets on the pseudoranges with additive ramps, as well as individual signal power levels at very precise points in time.
Also, the GNSS simulator must be able to synchronize itself with the live sky’s GNSS signal. Another way to achieve realistic spoofing is to use two simulators controlled independently (that is, full control on constellation, navigation message, propagation time offset, power and so on).
FIGURE 1. Real-world jamming simulation must take into account key factors such as varying jammer power, as a function of their trajectories and antenna patterns. (Image: Skydel)
Q: Please discuss how to simulate a smart spoofer that would generate a replica of a constellation (or all constellations) and then produces two full RF transissions: one that is the true signal, and a strong spoofed signal that pulls the receiver to a false location. Can you simulate the two full multi-band RF ensemble?
Two artificial synchronized scenarios could be created using SatGen signal generator software that can reproduce the GNSS signals from a number of constellations. The user could create two separate signal streams, both starting at exactly the same position and time and using the same constellations, chosen by the user.
The second scenario could then be set to diverge away in position from the first scenario, while staying perfectly synchronized in time. The signal-to-noise ratio of each scenario could be adjusted independently of each other to simulate a spoofing situation where the spoofing signal is much stronger than the real signal. A file containing this twin scenario can be replayed using a LabSat Wideband with two separate RF outputs, each synchronously replaying the two different scenarios. This would closely simulate the actions of a smart spoofer, but in a completely repeatable, and controllable manner.
This could be accomplished by either combining the output of two of our CLAW GPS simulators, or by combining the output of a single CLAW simulator with live-sky signals using passive industry-standard splitters/combiners. The CLAW is able to receive a custom ephemeris download in RINEX format to match either the spoofed live-sky constellation, or to generate a synthesized constellation in the case where two CLAW simulators are being used.
The simulator has a wide RF power adjustment range of over 45-dB, allowing the spoofing signal to be gradually introduced to the primary GPS constellation RF signal. This spoofing simulation could be accomplished with better than 0.5 meter peak-to-peak positioning accuracy and better than 5-ns real-mean-squared (rms) typical UTC (GPS) offset unit-to-unit, allowing the victim receiver to be pulled off of its true (live-sky) position with very high accuracy. Typically, GPS receivers are spoofed easily as long as the UTC timing synchronization is 500-ns or better between the live-sky and spoofed signals.
Timing synchronization to the spoofed victim GPS signal to within nanoseconds is achievable through the external 1PPS reference input, the simulator accepting a position, navigation and timing (PNT) fix in real time via its NMEA serial and 1PPS inputs. This allows capturing a moving victim receiver by estimating its momentary position, then ramping up the spoofer power, and then presenting the victim receiver with alternate position information as required (see Figures 2 and 3).
High position and timing accuracy between the spoofed and live-sky signal is important to prevent and mitigate spoofing detection via UTC phase or position jumps that could happen when the receiver gradually or quickly switches over to the spoofed satellite signals.
FIGURE 2. Spoofing attack on a GPS receiver using a CLAW simulator to spoof a live-sky antenna signal. Initially the spoofer was phase- and frequency-synchronized to UTC(GPS), then spoofer RF power is ramped up, and once the victim GPS receiver is captured, a frequency offset is added to UTC(Spoofer), which pulls the system off-phase. (Figure: Jackson Labs)FIGURE 3. Simulating a spoofing attack on a timing application where the spoofer does not know the exact victim antenna location with certainty. The resulting antenna position offset error (50 meters in this simulation) still allows the victim receiver to be captured, and then causes a time error as satellites move in and out of view even with the spoofer being synchronized to UTC(GPS) at all times. This error is clearly visible in the resulting UTC(Spoofer) output from the victim receiver equipment. (Figure: Jackson Labs)
Q: We want to correctly model and simulate effectiveness of various anti-jamming (AJ) and anti-spoofing (AS) solutions to make informed decisions about which AJ/AS solution is most effective for a specific mission and interference scenario. How can you help?
Live-sky testing on a jamming/spoofing range provides a wealth of data, and reassurance that the system under test does work as intended. Record and playback systems (RPS) under live-sky conditions can allow further evaluation back in the lab, after the live-sky tests are complete. Performance parameters of the RPS may degrade the validity of the signal when played back; signal bandwidth and bit-depth are absolutely key, for example. Recordings that use too few bits will degrade the dynamic range of the recorded signals, so significant care should be taken when selecting an RPS.
Either way, under live-sky or with recorded live-sky, you get what you get. It is extremely difficult to predict what the test parameters actually are. It is perilous to attempt to alter the test parameters after the event. Lab-based or anechoic chamber-based systems have their limitations, but they are repeatable, predictable and tweakable. Again, performance parameters of the simulation system play a key role in the validity of the testing. The ability to calibrate the simulation system to give a repeatable, predictable performance is as important as the realism of the simulation. Carrier-phase accuracy/repeatability among antenna elements and signal timing accuracy are important parameters when evaluating AJ and AS systems.
Q: We had a receiver where the time stamp for any location report would drift off progressively, up to an hour off of the known true location. What might contribute to this? We do not believe this was an intentional threat, but an artifact of nearby electronics or other system conditions. It actually occurred on a pivot irrigation arm in motion, with substantial vibration. The receiver was electrically isolated. The results were repeatable on the pivot arm, but not on our vibration table.
Interesting problem with no obvious answer. Even the worst oscillator will take many months to drift off by up to an hour with no GNSS, even under horrible vibration conditions, so this is an unlikely cause. Is it drift or a jump in error? Nearby electrical noise could cause GNSS denial (jamming), but not erroneous data. That requires spoofing. If you have no reason to believe that it is intentional, that makes spoofing unlikely, but still possible. Is a GNSS repeater or a record/playback GNSS tester operating in the area? These are spoofers, even if they are unintentional.
If this is a precision agriculture application, then an RTK reference station transmitting erroneous data could be the cause. What time-stamping format is used: local time or UTC? An unlikely but possible scenario is the unit is changing time zones so local time jumps an hour. Is there a processor/software app between your output and the actual GNSS receiver? This could introduce errors. What is the position output indicated when the time drift occurs? The best way to diagnose this is to record the time and position output as log files using a laptop PC connected to the serial data.
Q: Do your simulators work as well for testing handheld, consumer-grade GPS? Please discuss the differences in testing techniques or approaches for high-precision vs. mass-market receivers?
We have a range of simulators suitable for all levels of GNSS testing. If you don’t need the high fidelity and wide bandwidth of the LabSat Wideband, then the entry level LabSat 3 will also work with any GNSS device including handheld consumer-grade products.
To fully explore the performance of high-precision receivers, including multipath effects and P-code reception, a wider bandwidth and a greater number of bits would be required to capture and replay all of the available signals. For these applications, we recommend a bandwidth of 56 MHz and at least 4 bits of resolution.
For testing of consumer-grade, handheld devices with simpler RF front ends, we recommend a much reduced bandwidth of around 9 MHz and only 2 bits of resolution. This smaller bandwidth and fidelity will easily reproduce the majority of real-world conditions, and the resulting data files will be much easier to handle.
FIGURE 4. Simulator graphical user interface. (Image: Racelogic)
Q: How many GNSS signals can a software-defined radio produce?
The theoretical limits of a software-defined radio (SDR) are based on four distinct characteristics of the SDR: the digital-to-analog converter’s (DAC’s) bit resolution, the maximum sampling rate, the bandwidth and the number of RF outputs. With most SDRs, available bandwidth is defined by the sampling rate.
With a 16-bit DAC, there is enough dynamic range to generate up to 50 GNSS signals and hundreds of multipath echos (with more than 60 dB of range to accommodate different signal power levels) per RF output.
For example, with a sampling rate of 50 MSps, a 40-MHz wide signal — combining GNSS constellation signals such as GPS L1 C/A, Galileo E1, GLONASS G1 — can be generated. Nowadays, SDRs can have two or more RF outputs and are able to operate with sample rates of 100 MSps or higher. By distributing the GNSS signals across different RF outputs, the entire GNSS spectrum can be covered at a relatively low cost in terms of hardware.
A handful of SDRs can easily be synchronized to form multiple RF output systems. In such cases, the complete range of GNSS signals for all visible satellites can be generated at the same time.
Q: In a dual-frequency receiver would it be possible to still use L1 spoofed/jammed with L2 clean to get an accurate position? Is it possible to do a combination between the two signals in order to save the spoofed/jammed L1?
In principal, it is still possible to use L1 spoofed/jammed with L2 clean in a dual-frequency receiver to get an accurate position. Such receivers are available as off-the-shelf products. These receivers use a special algorithm to detect if a GNSS frequency band is spoofed/jammed and automatically switch over to the clean frequency band. However, this principle can only be applied if the entire GNSS spectrum is not completely jammed. Whether a dual-frequency receiver can still use L1 spoofed/jammed with L2 clean to get an accurate position is therefore finally basically dependent on the overall bandwidth of the interferer/jammer.
With IFEN’s TITAN simulator, it is possible to easily create the corresponding simulation scenarios for the real-time simulation of realistic test scenarios to test the robustness of GNSS receivers against interference/jamming and also spoofing. In doing so, various static and dynamic interference/jamming sources are supported by the simulator’s software.
It is possible to achieve a PNT solution using L2 signals only. This requires reception and decoding of either the military L2 P(Y) signal, or reception of the new but still pre-operational L2C commercial signal. Codeless or semi-codeless commercial L1/L2 receivers rely on tracking the carrier phase on L2 to be able to mitigate effects such as solar flares and ionospheric errors; however, they are not capable of generating a PNT solution with L2-only reception as would be the case under this spoofing/jamming scenario.
P(Y) signal reception on L2 typically requires reception of the coarse acquisition (C/A) signal on L1 prior to tracking P(Y) unless the receiver has its own internal (atomic) time-base synchronized to UTC to the sub-microsecond level.
On-Demand Webinars
Simulation against Jamming and Spoofing: With cyber attacks on the rise, it is more critical now than ever to thoroughly test GPS and GNSS systems against jamming and spoofing.
Ligado Networks will appear and present at the National Space-Based Positioning, Navigation and Timing Advisory Board’s (PNTAB) meeting on Nov. 15 in Southern California.
Ligado and its predecessors have sought to install high-powered ground transmitters that have been shown to harm and overwhelm GPS signals and receivers in their general vicinity. The controversy has simmered for at least eight years without resolution.
That final resolution will ultimately be taken by the Federal Communications Commission (FCC), although congressional participation is also conceivable, since national infrastructure security is involved.
Meeting Locale. The PNTAB meeting will take place Wednesday, November 15, 2017, 9:00 a.m. to 5:00 p.m.; and Thursday, Nov. 16, 9 a.m. to 1 p.m., at the Crowne Plaza Redondo Beach & Marina Hotel, 300 North Harbor Drive, Redondo Beach, California, approximately a half hour’s drive south of Los Angeles International Airport. The meeting will be open to the public up to the seating capacity of the room. Visitors will be requested to sign a visitor’s register.
From June 28, 2017, PNTAB presentation by Brad Parkinson.
The central issue in this long-running fight is the as-yet unknown — though uniformly predicted by the various rounds of testing over the last eight years — effects of Ligado signals on a huge installed industrial and governmental base of GPS receivers, some of which are essential to the nation’s critical infrastructure.
Ligado Networks, the current-day incarnation of once-bankrupt LightSquared, seeks FCC permission to apply the satellite-based frequency licenses it owns to be broadcast from a ground-based network. This would put a powerful nearby signal immediately adjacent to the much weaker, more distantly emanating GPS signals, and by the way, those from other GNSS as well. Tests in 2011 and further testing in 2016 demonstrated these powerful signals interfering with GPS receivers.
Brad Parkinson
The Ligado appearance comes in response to an open letter, posted on Oct. 10 by PNTAB First Vice-Chair Brad Parkinson, inviting Ligado CEO Doug Smith to speak to the Advisory Board. That invitation itself emerged after a season of what have been termed “attack” statements issued in various forums by Ligado, which were in turn stimulated by two early-summer letters:
1. A June 27 letter from the American Geophysical Union, Aerospace Industries Association, American Meteorological Society, Aircraft Owners and Pilot s Association, Airlines for America, General Aviation Manufacturers Association, International Air Transport Association, Iridium Communications, Thales USA and other organizations (totaling 22) to the FCC opposing Ligado’s request.
“The undersigned organizations . . . write to reiterate that the threat of harmful interference from Ligado’s proposed ancillary terrestrial component (“ATC”) service remain real and persistent. Contra ry to the assertions in Ligado’s FCC advocacy and recent media blitz, its proposed terrestrial operations continue to pose a significant interference risk to numerous parties . . . . The risks to these critical services are very real and, consistent with the public interest, cannot be brushed aside.
That letter further notes that “Ligado seeks the ability to sell its spectrum to the highest bidder, underscoring the uncertainty of any prospective value of the services it has on previous occasions suggested it may provide. There is a clear effort by Ligado to downplay the significance of the technical concerns it continues to receive from numerous directions.”
2. A July 5 letter from the PNT Advisory Board to Deputy Secretary of Defense Robert O. Work and Deputy Secretary of Transportation Jeffrey A. Rosen, the co-chairs of the National Executive Committee for Space‐based Positioning, strongly opposing the Ligado proposal.
From June 28, 2017, PNTAB presentation by Brad Parkinson.
“The revised [Ligado] proposal to the FCC is fundamentally unchanged from a previous proposal reviewed in 2011. Extensive government testing in 2011 and in 2016, clearly shows that both proposals cause definitive harmful interference to many classes of GPS receivers.”
“All GPS stakeholders should be wary of any incremental approaches to deploying mobile broadband services in the mobile satellite systems (MSS) band. For example, initial services could operate at reduced power levels on a temporary basis to protect only a subset of GPS users, before moving to full — power levels that will cause widespread interference to many other classes of GPS users. Regulatory decisions must be based on the ultimate end-state of any systems proposed for operation in the bands adjacent to GPS, and must protect all classes of GPS users. Unfortunately, the latest industry proposal does not acknowledge the legitimacy of, and the need to protect, dozens of precise applications of great national importance.”
From June 28, 2017, PNTAB presentation by Brad Parkinson.
Round Two. The struggle has been a prolonged one, with many twists and turns, however coalescing into two main periods of activity:
2011-12, when the first round of tests showed then-LightSquared’s proposed network would overload the vast majority of GPS receivers. The Federal Communications Commission (FCC) tabled the proposal, and the company, holding spectrum licenses whose value could range far into the billions of dollars, filed for bankruptcy.
2016–18. LightSquared emerged from Chapter 11 in 2015 as Ligado Networks, positing a modified network plan, but one whose organizing concept remains unchanged, causing deep and continued alarm over GPS interference. 2017 tests, conducted by a firm and a government organization hired by Ligado, essentially reconfirmed the 2011 results. The tests found that the proposed ground towers would significantly interfere with GPS receivers as far away as 4 to 5 kilometers, “killing them dead” in the words of one expert who reviewed the test data.
Parkinson’s October 10 letter invites Ligado CEO Doug Scott “to provide the committee with clear up-to-date design information. . . . How might the system as now envisioned be deployed? How many ground terminals are needed, for example, and where would they be?”
Previous LightSquared and Ligado presentations have been long on promise but short on details. In fact, sound technical underpinning has not been communicated.
From June 28, 2017, PNTAB presentation by Brad Parkinson.
Parkinson writes “we would therefore encourage you to specifically describe your implementation plan , with a corresponding test plan address ing the issues we have openly raised . We request you specifically focus on those regarding the potential for interfering with any GPS /GNSS services that operate in the protected Space – to – Earth L band (1559 – 1610 MHz) . Included should be all modes of operation and the use of all current and future GNSS sign als. Without these specific technical details and corresponding evaluations, we can only conjecture as to what you are really proposing .”
Later, he affirms “our focus is to provide advice based on deep engineering and related expertise . As you know, interference to GPS/GNSS can adversely affect numerous safety – of – life systems , other vital national assets, and applications comprising over $60 billion of annual U.S. productivity benefits .”
Parkinson and the PNTAB have had better luck securing a Ligado appearance than did GPS World magazine. In August of this year, Ligado’s senior vice president and chief engineer for radio access technologies thrice declined an invitation to give a brief Expert Opinion for the September issue on the question: How can the safety, security, and full utility of GNSS applications be ensured while evolving best, most efficient use of limited, very valuable electromagnetic spectrum?
Just a Refresher. The PNTAB meeting will be held Wednesday, November 15, 2017, 9:00 a.m. to 5:00 p.m.; and Thursday, November 16, 2017, 9:00 a.m. to 1:00 p.m., at the Crowne Plaza Redondo Beach & Marina Hotel, 300 North Harbor Drive, Redondo Beach, CA, approximately a half hour’s drive south of Los Angeles International Airport. The meeting will be open to the public up to the seating capacity of the room. Visitors will be requested to sign a visitor’s register.
Ligado is by no means the only item on the Committee’s docket, but is very likely to be the pièce de résistance. The full agenda for the meeting includes:
Update on U.S. Space-Based Positioning, Navigation and Timing (PNT) Policy and Global Positioning System (GPS) modernization.
Prioritize current and planned GPS capabilities and services while assessing future PNT architecture alternatives with a focus on affordability.
Examine methods in which to Protect, Toughen, and Augment (PTA) access to GPS/Global Navigation Satellite Systems (GNSS) services in key domains for multiple user sectors.
Assess economic impacts of GPS/GNSS on the United States and in select international regions, with a consideration towards effects of potential PNT service disruptions if radio spectrum interference is introduced.
Review the potential benefits, perceived vulnerabilities, and any proposed regulatory constraints to accessing foreign Radio Navigation Satellite Service (RNSS) signals in the United States and subsequent impacts on multi-GNSS receiver markets.
Explore opportunities for enhancing the interoperability of GPS with other emerging international GNSS.
Examine emerging trends and requirements for PNT services in U.S. and international fora through PNT Board technical assessments, including back-up services for terrestrial, maritime, aviation, and space users.
Columbus, Ohio, has positioned itself smartly for an autonomous future, taking a lead role in pilot projects on infrastructure and autonomous air and road transport.
The city will draw on up to $40 million in grants from the U.S. Department of Transportation, $10 million from Vulcan, Inc,. and $500 million in local private pledges.
Carla Bailo, assistant vice president for mobility research and business development at Ohio State University (OSU), presented the city’s ambitious program at ION GNSS+.
In “Position, Navigation and Timing — An Enabling Technology for Mobility and Smart Cities,” she focused on a triple-zero target: zero accidents and fatalities, zero carbon footprint and zero stress.
Smart Columbus will put six autonomous shuttle buses in the commercial district, coordinate truck platooning, time deliveries and manage parking to reduce congestion, and undertake drone delivery of medical supplies and other critical needs. Multimodal transit apps, mobility assistance for those with disabilities and pedestrian collision avoidance will be based on real-time data on transit options and availability, as well as traffic information, road and weather conditions.
Position, navigation and timing (PNT) technologies play a central role in smart cities: vehicle-to-vehicle and vehicle-to-infrastructure communication, autonomous navigation and collision avoidance, location-based services and smart, resilient infrastructure.
Smart Columbus envisions the city as a center for high-tech transportation research and innovation. OSU’s partnerships with mobility companies and vehicle manufacturers, industry groups and government agencies contribute to the city’s comprehensive approach to the smart city project. Through its expertise in sensors, communication, PNT, transportation, autonomous and connected vehicles, and geospatial science and engineering, OSU will serve as the lead researcher on Smart Columbus.
Dorota Grejner-Brzezinska, OSU professor and frequent contributor to GPS World, in her new role as associate dean for research at OSU’s College of Engineering will be a key participant in research projects on ways to integrate self-driving cars, deliver high-definition 3D maps and metadata, use sensors to better connect vehicles for safety and efficiency, and find better ways to move people around the city when they don’t have access to a car.