Artists rendering of the B-21 raider, which is being produced by Northrup Grumman for the U.S. Air Force to operate in tomorrow’s high-end threat environment. (Image: U.S. Air Force)
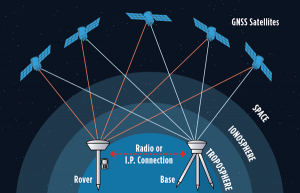
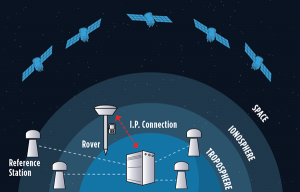
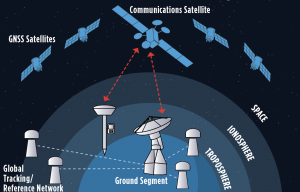
With assured positioning, navigation and timing (APNT) and low-Earth orbit PNT (LEO PNT) coming on strong, what does the future hold for military and commercial systems dependent on the current configuration of GPS? Should military and commercial platforms be modified to include APNT, for now, with an eye to adding LEO PNT in the future? Should they integrate these two systems, or rely on one or the other as standalone systems?
Government and industry agree that interference with GPS and all GNSS is an increasing threat as jamming and spoofing technologies evolve. This has prompted government support for APNT to bolster GPS. A Feb. 12, 2020, Executive Order required a comprehensive update to national policy on PNT services by the federal government, and by owners and operators of critical infrastructure to strengthen the resilience of critical infrastructure.
Research, development and production have improved the performance — positioning, timing and (desired) accuracy — of GNSS PNT and the ability to operate in RF-challenged environments. APNT gives the U.S. military a reliable way to further enable GPS, or to act as an alternative to it, by utilizing other sensors, such as inertial navigation systems, differential GPS, visual sensors, lidar, radar, radios and star trackers that complement GPS.
The near-term expansion of internet service to include commercial broadband LEO satellites also provides potential for robust PNT, using their waveforms as signals of opportunity (SOOP). GPS and other GNSS have an infrastructure to maintain very precise time throughout their constellations, as well as satellites with specially designed transmitters, clocks, and a waveform dedicated to the PNT function. By contrast, SOOPs are in space for another purpose and not optimized for PNT. Therefore, the challenge is to exploit features of the SOOP waveforms, designing innovative techniques to determine the range to each satellite and to provide users with reliable PNT. The approach for LEO PNT may have applications to ground troops and for aerial, munition, missile and commercial applications requiring higher levels of PNT security and integrity.
GPS receivers for future military platform designs may use a software defined radio (SDR) approach and be capable of incorporating LEO PNT signals. This technology, although designed to work standalone, can be used to complement existing navigation sensors that are typically used in navigation systems, including APNT. Expansion to the usage of multiple constellations will serve to optimize performance and resiliency in an RF-challenged environment. However, LEO satellites’ closer proximity to Earth and their signal structures allow for higher signal powers, thus are more robust against jamming. With all these separate systems or fusion by SDR, how does the receiver ensure the integrity of the signal or its accuracy? An SDR qualification test would involve an unlimited number of scenarios.
One hallmark of the GPS program is that it facilitates a thorough systems engineering effort by managing in a single location interface control documents (ICDs) for alternative systems being developed by different program offices all over the country. This makes both the integration of the systems and the development of the receivers extremely difficult and complex.
“The new SPD-7 [Space Policy Directive 7, the United States Space-based Positioning, Navigation and Timing Policy, dated Jan. 15, 2021] focusing on interoperability and APNT is a seminal document to address a realized threat and a way forward,” said Bernie Gruber, a former head of the GPS Directorate (now the Military Communications and PNT Directorate). “To that end, the combination of SDRs and data fusion potentially offer a clear advantage to utilize signal and sensor diversity, thus improving the robustness of critical PNT information.”
GNSS links the three steps in this example paving system. The mobile scanning system creates a 3D model that the grinding and paving equipment systems use. (Image: Topcon)
Even construction projects that involve separate pieces of heavy equipment can be tightly coupled, with GNSS as the “glue.” One example is Topcon’s SmoothRide paving system. The separate active steps of grinding and paving are working from a 3D model developed in a first step: precise mobile scanning. Each step constrains (horizontally) with GNSS, and vertically to the corresponding position in the model. In this example, the premium is on the quality of the scan.
For the first step, an RD-M1 scanner, usually attached to a pickup truck, can scan at highway speeds. The positioning component is an integrated HiPer SR GNSS receiver and inertial measurement unit (IMU). The GNSS observations, IMU data, and velocity from a wheel encoder are post-processed (PPK) together, to provide a high-definition 3D model with very tight relative integrity.
“A great lateral benefit of scanning in this manner is that it can be done quickly and also gives you a model of the area surrounding the road,” said Mark Larranaga, director, Intelligent Paving Business Development. “You get the terrain for drainage design, guardrails, signs, road furniture — everything you might need for good roadway design.”
For base data for the post-processing, Larranaga said a GNSS base typically will be set up on the site, though if a permanent base from a network such as TopNet is nearby, that can be used.
“The model is then created in MAGNET Collage software,” Larranaga said. “That produces the surface file. Once we get that created, we take it into a software called MAGNET Resurfacing. It is used to design for cross slope correction, or a smoothness factor, as well as material management — the software will do all this automatically. The software empowers the customer to create a file for the machine that will maximize the potential of the end results, based on the project parameters. Thus, allowing the contractor to evaluate and learn about potential pitfalls and maximizing incentives.”
The next step, using roadway surface grinding equipment, employs a two-antenna GNSS system (for position and heading). A sonic sensor is keyed to the corresponding elevations in the 3D model and informs the depth for which the grinder is set. The third step, paving, is quite similar: GNSS and a sonic sensor constrained by the precise 3D model. There are some implementations that add thermal cameras and look behind a paving machine to see whether certain target specifications are met in real time.
Industry experts noted in our November 2022 issue that heavy equipment autonomy may be a distant future. However, the steady innovation in machine-control technology to get there is yielding substantial value. To drill deeper into those technologies, we interviewed additional industry experts with a focus on the key role of GNSS in such systems.
1D, 2D and 3D
There is currently a sharp growth in the adoption of 3D systems, according to Jordan Van Wie, product specialist with SANY America, a prominent manufacturer of construction equipment. “The fact is that many jobs are requiring this. They’re more efficient in their bidding process. They know exactly where they need to cut and where to fill — this means being more productive in less time.”
SANY America is based in Peachtree City, Georgia, where many of its construction equipment systems are manufactured, including the SY225C, a popular medium excavator.
The process of automating to the levels the operators desire is a matter of which sensors are added and how they sense the active geometry of the equipment in use.
For an excavator, SANY installs four sensors, then measures the machine, said Mukesh Selvaraj, product manager, medium and large excavators, SANY America.
“We know the distance between the bucket pin and the stick pin, up through the boom, and the angles on the sensors. We can compute in the system and report where the tip of the bucket is in relation to the body, and construct a 3D model in real time. This reporting can be as fast as 200 Hz.”
Among the machine-control systems implemented on SANY construction equipment are those from Hexagon | Leica Geosystems. Leica produces precision guidance and control sensors and systems for construction, agriculture and mining that are integrated onto various heavy equipment brands.
While 3D is becoming more popular, systems need to be scalable. Hexagon | Leica Geosystems has variants for different levels of guidance and automation, said Kert Parker, U.S. channel development manager for the company.
“For instance, if you start with our PowerDigger Lite, it has a control box, a display, a boom sensor, an angle sensor for the stick (which includes a laser catcher) and a 360° bucket sensor. This lets you know where the bucket tip is in relation to the model — call it a 1D system.” The cost of such a system might only be 5% or 10% of the cost of the machine on which it is installed — a modest investment for the productivity gains it can deliver.
To upgrade and run automatics, users could add a machine control panel and docking station with just 2D software. “That will give you a semi-automatic solution even on 2D. Then you can upgrade and add the GNSS receiver and antenna — or antennas — and 3D software to make it 3D, semi-automatic,” Parker said.
Two-thirds of the price of the base system is for the sensors on the boom, stick, bucket, the pitch and roll sensor, and the wires that communicate throughout the system, Parker explained.
“So, it’s completely scalable. You can start with a low-cost system upgrade to do GNSS fully and semi-automatic. We can automate any pilot-controlled machine, then we set the pressure. And when we sense the stick pressure, if the system is going automatic, then we automate the boom and the bucket.”
Third ‘D’ Options
“When you’re using something to give the machine a northing, an easting and a height at all times — that is when it becomes full 3D,” Parker said.
3D systems can be configured with a single GNSS receiver, with dual GNSS receivers, or off of a robotic total station. “The only difference between single and dual is that, with single, every time you move the machine you have to do a calibration swing, about 90° to get your heading again.”
“You can dig curves and complex designs working in 2D,” Van Wie said. “But every time you move the machine, you have to re-bench to a known reference, either by pinching with a bucket’s teeth, or hit the stick sensor that has an incorporated laser catcher. When you move the machine, you catch the laser beam again, and you use that for your known reference to dig back from the 3D model.”
Excavators are a high-growth class of heavy equipment for machine-control adoption, with many excavators ready for system integration. Shown here, Leica iCON iXe3 systems on a Kobelco SK210 (left) and Hitachi 300-02 (right). (Image: Hexagon | Leica Geosystems)
For certain operations — such as excavating in a straight line or moving materials to the side —higher levels of automation may not be needed, so some users appreciate the option of starting with a cheaper system.
“For the small operator, of course, but even for a large operator, it’s a big investment to go full 3D,” Van Wie said. “They don’t want to go full 3D right away, or not on all equipment at once. They start off with just the basics and get familiar with it. Then when they want to upgrade, they have some of the stuff that they’re going to need for their machine already on it.”
System Examples
eSurvey GNSS manufactures GNSS-based equipment, software and systems for surveying, mapping, agriculture, UAV and construction. Better known in other global markets than in North America, the company has seen a steady rise in the market for construction automation — outpacing other sectors utilizing heavy equipment automation such as agriculture and mining combined. For construction, in many parts of the world excavators are the prime focus for automation.
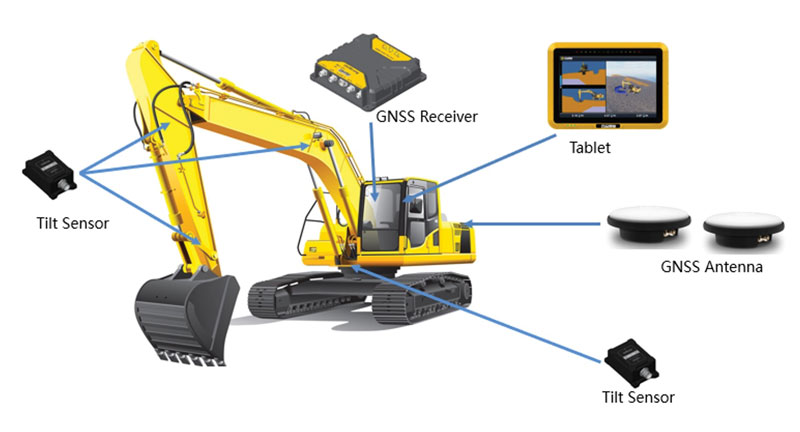
Figure 1. A common configuration of sensors for excavators: GNSS receiver, dual antennas, control tablet and tilt sensors on the body, boom, stick and bucket.(Image: eSurvey GNSS)
Their eME10 system for excavators includes a dual-antenna GNSS receiver, three single-axis tilt sensors, one dual-axis tilt sensor, a tablet and software (Figure 1). “The eME10 does not support a rotating bucket at this time,” said Edward Zhang, product manager for machine control technology. “We support standard excavators, excavators that reach into the water (for instance on dredging barges), and with different bucket tools such as quartering hammers and milling tools.”
Another popular system for compactors is the eMC10, with a single-antenna GNSS receiver, tablet and software, and optional temperature and vibration sensors.
Managing Positioning
Both the excavator and hydro survey boT have dual GNSS antennas for position and orientation, ensuring fidelity between the 3D model and operation of the excavator for dredging. (Image: Gavin Schrock)
High-precision GNSS, as implemented for architecture, engineering and construction (AEC) applications, can yield centimeter-grade results. However, as many AEC professionals and practitioners know, achieving repeatable and consistent results requires an experienced and skilled GNSS operator. Is the operator examining the results for statistical consistency? How have the observations been constrained to the desired reference framework? Have sources of error such as multipath and space weather been considered?
However, Nick Fifarek, general manager at SITECH Pacific LLC, a construction technology provider, said that equipment operators only need to learn the user interface.
“They are mostly concerned with how the grade is shown in the model, and what actions are required to meet the grade. They should not need to be concerned with the working of the GNSS receiver.”
A larger firm with multiple systems will usually have a technician or surveyor on board, Fifarek explained. This expert would have the experience needed to set up a GNSS site base, ensure corrections are received, and troubleshoot causes of anomalies and poor results.
To be efficient, an operator should not have to deal with a complex set-up.
“It should be more like Google maps in your car,” Fifarek said. “They do not need to know how the model was created, and how the GNSS delivers positions to the interface. All the sensors should work seamlessly, like tilt sensor and IMUs [inertial measurement units] and how they work together with the GNSS to put positions on the blade or bucket. Once this is all working well and the model is applied, they should just be able to take directions.”
Nevertheless, sometimes this expert will need coaching, or a small firm may not have an expert at hand.
“We may need to teach them about some fundamentals, such as signal-to-noise ratio, PDOP [positional dilution of precision], and other quality indicators — especially when setting up the site base station,” Fifarek said.
Additionally, he pointed out, the control must be set up — this is mostly done by engineering or surveying firms along with site calibrations — and operators need to know how to check it.
Multipath Issues. Fifarek has not experienced problems with short masts for GNSS antennas, saying that the height of the cab is sufficient. Modern multi-constellation receivers, have improved multipath mitigation, and are able to work in sites with limited sky view or obstructions. Equipment such as excavators and dozers typically have dual-antenna GNSS systems, or two receivers and antennas. This provides not only position, but orientation and heading. These are usually installed on the body or cab, although some systems have a GNSS antenna on each end of the blade. Some systems use a method that only fixes one of the antennas/receivers, and then performs a fixed baseline solution for orientation.
The Chain of Components
Much like autonomy in vehicles, machine control implementation can be defined as various levels.
Level 1: GNSS-assisted guidance. The most basic level of implementation provides the equipment’s location and heading. It acts the same way as a navigation device or phone in your car. The technology has been around for decades for precision agriculture and construction. Level 2: Implement Control. Control of the blade or bucket. Level 3: Assist. Implement control plus a level of automation where the operator moves the control stick to initiate an action the machine completes by moving the blade or bucket to meet the design model geometry. This can include steering for various types of equipment. Level 4: Autonomy. More on that later.
The power of tilt-compensated GNSS+IMU smart antennas may be the key to reducing the number and complexity of synchronizing a “chain of sensors.” In this example, a Trimble R780 smart antenna has been added to the stick of an excavator. (Image: Trimble)
For levels 2 through 4, continuously updating a position on the blade or bucket requires a chain of sensors to work in tightly controlled harmony. An excavator could be equipped with one or two GNSS receivers and antennas and a tilt sensor on the body, explained Geoffrey Kirk, product manager, autonomy and assist for Trimble. The GNSS will provide the position and orientation of the body, or rotating section of the body, on an excavator, and the tilt sensor reads how level it is. Another option is positioning with a total station and prism on the body, such as when GNSS is not available. “Either way, you need to know where you are in 3D space to be able to work on any 3D model,” Kirk said. “Today there are usually about 30 satellites in view. We can do so much more now compared to the days when we had fewer satellites, things that would have been impractical,” Kirk continued.
Sensors on the boom, stick and bucket can be likened to an upper arm (boom), forearm (stick) and hand (bucket), with rotating buckets acting like a wrist.
“We put a six-degrees-of-freedom IMU at each of these locations,” Kirk said. This is a chain of highly dependent geometry extended out to the bucket. However, Kirk said there may be a better way.
Reducing the Links
In recent years, a new technology has been implemented for GNSS smart antennas (rovers), like those that surveyors and grade checkers use, which tightly couples IMUs and movement of the GNSS antenna for calibration-free tilt compensation. Examples include the Trimble R12i (for surveying) and R780 (for construction), Leica GS19 T, and many more — few high-precision rovers made today lack tilt compensation. The observed acceleration and direction of the antenna adds orientation to the tilt angle (from the onboard tilt sensors), so the position of the tip of the survey rod can be computed precisely and in real time.
At the Bauma construction trade fair held in November 2022 in Munich, Germany, Trimble gave participants a peek at something new: putting a tilt-compensating GNSS smart antenna out on the stick of an excavator.
“With current systems, every time you hit one of those joints on an excavator, you need to understand what it is doing, calculating angles along the way,” Kirk said. “By mounting a tilt-compensated GNSS receiver on the stick, this becomes a lot easier to do.” Such innovations dovetail well with another trend in construction equipment: a move from purely hydraulic steering to drive-by-wire. This trend makes for more simplified and often less costly processes for adding implement control and automatics, but may also be key in implementing autonomy.
The Path Toward Automation
“One of the big changes in the industry is understanding what tasks operators are trying to do, so that we can help them do those tasks,” said Kirk. “We want to help people be more productive. We know autonomy is a thing. We’re actively working on autonomy; it’s going to be a while. In the interim, we want to make sure that we are providing value to the manual operators for the tasks that we can’t do autonomously.”
Key foundational components of what would go into autonomous systems are already in place.
“With automatics, you already have implement control, and in some implementations, you even have steering,” Kirk said. “What is missing in terms of the mechanics is speed control — that may be the easy part.” Adding the crucial situational awareness, other sensors for feedback, and the brains for automation is what might take a lot of time to work out.
“Autonomy for cars is where you are trying to avoid hitting things,” said Kirk. “For construction, we are in the business of hitting piles of dirt and spreading them around.” For a car, the sensors see something, recognize it, know how far away it is, and can issue such commands as “stop” or “slow down” — which is not so simple for construction.
Three key technologies you’ll see being used for situational awareness are radars, cameras and lidar, mostly used in combination. “Radars have some really nice behaviors,” explained Kirk, but cautioned that they cannot tell what they are doing.
A demonstration implementation of an autonomous excavator.(Image: Trimble)
For instance, adaptive cruise control in cars, which is nearly always done with radar, works very well and reliably. Most such radars are now solid state and safety certified. Unfortunately, he points out, while radar is very good at alerting drivers that there is something in front of them, it is not very good at telling them what it is.
“That’s why developers put in cameras, so that you can see whether what’s in front of you is a person, another vehicle, or something else. That’s why you have those combinations of sensors.”
One of the reasons it will take longer to automate construction, Kirk explained, is that operators need to know much more about the nature of other objects in the construction environment than cars do on the road. The operators need to know not only what people, equipment and materials are around them, but also whether there is something or someone standing in front or on top of the pile of dirt.
“For situational awareness, you need to be able to do real-time mapping,” Kirk said. “Lidar and cameras, such as stereographic cameras, can be used as classifiers. Lidar can have limitations, such as when driving directly into the sun.”
“The smarts for autonomy are knowing what the task is and how to perform that task,” Kirk said. “However, from the standpoint of a machine’s sensor and setup, we’re not controlling speed, though we do on agricultural machines. So, machines are matched really well for autonomy — you can make them do whatever you want today.”
Examples of autonomous conduction systems were demonstrated in the off-site “sandbox” exhibit of Trimble Dimensions+ held in November 2002 in Las Vegas. There was an autonomous excavator, a compactor and a remote-control dozer.
Yet these were operating in a controlled environment. Kirk said that for safety reasons, early adoptions of autonomy might be confined to sites that are not along roads and highways.
GPS is the gold standard for precise positioning, navigation, and timing (PNT), impacting the lives of more than six billion users worldwide. The United States economy alone depends on the free, government-provided service across 900 million GPS receivers supporting vehicle navigation systems, general aviation, financial transactions, the electrical grid, precision agriculture, surveying and construction. The GPS enterprise must remain consistent and reliable, while keeping pace with emerging technology without interruption for the end user.
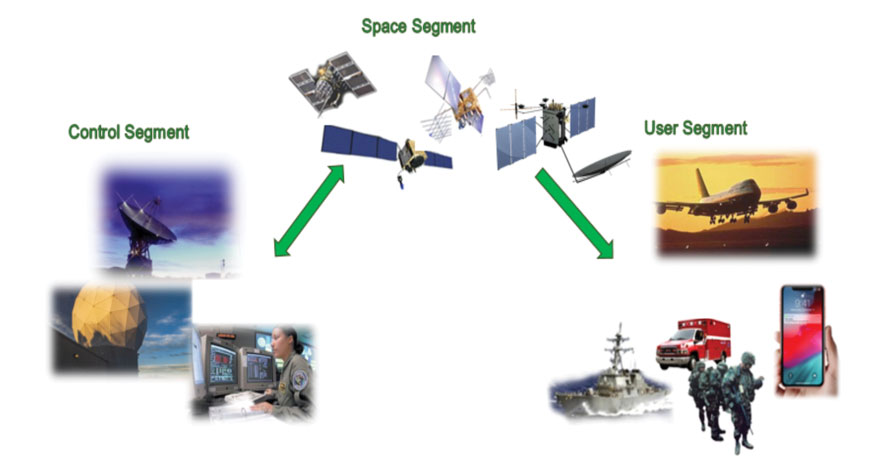
Space Systems Command (SSC) at Los Angeles Air Force Base in El Segundo, California — the U.S. Space Force’s space development, acquisition, launch and logistics field command — is responsible for maintaining and modernizing the GPS enterprise. The enterprise consists of three segments: the space segment, the control segment and the user segment. Each achieved specific milestones during an exciting and productive 2022.
A new MGue for warfighters is moving closer to completion. (Image: EvgeniyShkolenko/iStock /Getty Images Plus/Getty Images)
Space Segment
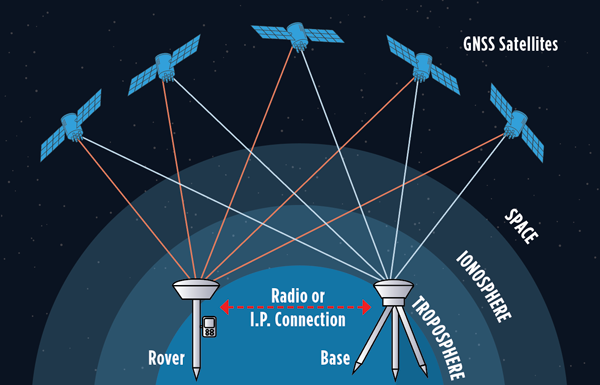
There are currently 37 GPS satellites on-orbit with 31 set healthy. The constellation requires 24 operational satellites for worldwide coverage and a receiver needs to receive transmissions from four of them to determine its position in three dimensions. GPS continues to operate impressively with an average 45-cm accuracy throughout the past year with the most precise day on record at 31.5 cm. The space segment of GPS modernization focuses on GPS III and GPS IIIF satellite development with significant milestones rounded out in 2022.
For GPS III, after the successful launch of Space Vehicle 5 (SV05) on June 17, 2021, it was set healthy (usable) on May 25, 2022. The significance of SV05 is its full operational capability of the improved civilian L2 (L2C) signal. L2C improves service speed for commercial users via access to two frequencies, improves accuracy when combined with legacy civil GPS signals (L1 C/A), and is less susceptible to ionospheric interference. SV05 is the 24th satellite enabled with the Military Code (M-code), providing worldwide M-code coverage. M-code is designed to give military receivers better defense against jamming, improved accuracy, a more secure and flexible cryptography architecture, and the ability to detect and reject false signals.
On Jan. 18, 2023, SV06 successfully launched into orbit aboard a SpaceX Falcon 9 Block 5 rocket from Cape Canaveral Space Force Station, Florida. The launch of SV06 marks a key step in the larger goal of modernizing the GPS constellation. Additionally, the 10th and final satellite in the GPS III fleet finalized production and has a target launch date of 2026. GPS III Space Vehicles 7–10 are in storage and available for launch.
The next generation of GPS satellites continues development. The October 2022 contract award for GPS III Follow-On (GPS IIIF) satellites will onboard additional capabilities. In addition to introducing new civil signals designed to enhance search-and-rescue efficacy and aviation safety, laser retroreflector array for precise ranging, and a fully digital navigation payload, the GPS IIIF satellites will offer a new Regional Military Protection (RMP) capability providing up to 60 times greater anti-jamming measures. A new port on the Lockheed Martin LM2100 Combat Bus supports a substantial increase in flexibility, providing rapid integration of payloads in response to emerging threats in space.
GPS Enterprise interrelated segments. (Image: Space System Command)
Control Segment
The Next Generation Operational Control System (OCX) will replace the current GPS Operational Control System (OCS), supporting the latest U.S. Department of Defense standards and practices for cybersecurity. The updated system includes a modernized and expanded monitor station network, improved anti-jam capabilities, and enhanced operational capability to control modernized military signals.
In March 2022, OCX completed its fourth and final legacy ground antenna element (LGAE) installation on Kwajalein Island in the Republic of the Marshall Islands. OCX Block 1 and 2 are undergoing Hewlett Packard (HP) Formal Qualification Test (FQT). This event will qualify much of the system’s previously certified mission software functions. The event will also demonstrate system maturity and readiness for system acceptance, operator training, and specific developmental testing milestones with both GPS space and user segments.
The next-generation control system, OCX 3F, will modify OCX Blocks 1 and 2 to use the enhanced capabilities of GPS IIIF satellites. OCX 3F received Milestone B and Acquisition Program Baseline (APB) approval from the Milestone Decision Authority (MDA) and was authorized to enter the Engineering and Manufacturing Development (EMD) phase in May. In November, the OCX 3F program deployed 3F mission software into OCX’s Near Operations Environment (NOE) for the first time after completion of the program’s first Integration Readiness Review (IRR). The IRR event ensures that the software meets integrity standards and receives approval to be integrated and tested on the NOE prior to software releases to the operational users. OCX 3F anticipates achieving operational acceptance in 2027.
The GPS III government and industry team recently core mated GPS III SV10 and nicknamed it “Hedy Lamarr” after the actress and inventor. (Image: Lockheed Matin)
User Equipment Segment
Among the arsenal of GPS user equipment, very few pieces have the technology to use the M-code signal. Maintaining a competitive advantage against the adversary requires use of these signals; the GPS Enterprise is focused on developing Modernized GPS User Equipment (MGUE) capable of accessing these signals. The MGUE program is a joint service program developing modernized M-code-capable military GPS receivers. The program is broken into two increments (Inc 1 and Inc 2). Both are designed to deliver secure PNT performance, allow navigation warfare operations, enhance anti-jam, enhance anti-spoof and anti-tamper, and enable Blue Force Electronic Attack.
As part of the multiple elements under the MGUE Inc 1 umbrella, L3Harris delivered its final Build 7 ground card to the government on Nov. 16, 2021, and completed regression testing on that kit in February 2022. The final Delta Security Certification and Approval were completed on April 13 and April 29, 2022, respectively. Development of the L3H Ground-Based GPS Receiver Applications Module (GB-GRAM-M) card, which delivers geolocation and precise positioning capabilities for space-constrained applications while providing increased security and anti-jam capabilities, is complete and available for services procurement. MGUE Inc 1 completed qualification testing for the aviation and maritime cards on Sept. 9, 2022, with updated software builds. This build allows the program to progress to 98% of the requirements verified and enables B-2 Bombers and Guided Missile Destroyers (DDG) to continue progress toward operational testing. Completion of this commitment means significant progress toward operational testing for stakeholders and warfighters.
MGUE Inc 2 held Preliminary Design Reviews for the Miniature Serial Interface (MSI) in summer 2022, bringing the project another step closer to finalizing the EMD phase. Once all closure and action items are completed for the reviews, the government will consider each event complete. Critical Design Review (CDR) is scheduled for this summer and will validate the system design and the ability to meet system performance requirements. MGUE Inc 2 continues to execute the second competitive objective under Phase I for the Joint Modernized Handheld component; the effort is moving closer to completion of the handheld prototype and will ultimately make for a more seamless transition to operations.
GPS ground antenna at Schriever Space Force Base in Colorado. (Image: U.S. Air Force)
Conclusion
The SSC’s mandate is paramount to maintaining our modern way of life. The space professionals dedicated to developing GPS technology are committed to delivering advanced capabilities to the warfighter, the civil sector, and the world. An interconnected world is ready for us. We’re on our way.
SSC is the U.S. Space Force field command responsible for acquiring and delivering the capabilities needed by warfighters to protect our nation’s strategic advantage in and from space. It manages an $11B budget for the U.S. Department of Defense and works in partnership with joint forces, industry, government agencies, academic and allied organizations to outpace emerging threats.
For analogous updates on the other three GNSS constellations, please see:
An approach for ground vehicles using carrier-phase and inertial measurement data
The combination of easily accessible low-cost GNSS spoofers and the emergence of increasingly automated GNSS-reliant ground vehicles prompts a need for fast and reliable GNSS spoofing detection. To underscore this point, Regulus Cyber, an Israeli cybersecurity company, recently spoofed a Tesla Model 3 on autopilot mode, causing the vehicle to suddenly slow and unexpectedly veer off the main road.
Among GNSS signal authentication techniques, signal-quality monitoring (SQM) and multi-antenna could be considered for implementation on ground vehicles. However, SQM tends to perform poorly on dynamic platforms in urban areas where strong multipath and in-band noise are common, and multi-antenna spoofing detection techniques, while effective, are disfavored by automotive manufacturers seeking to reduce vehicle cost and aerodynamic drag. Thus, there is a need for a single-antenna GNSS spoofing detection technique that performs well on ground vehicles, despite the adverse signal-propagation conditions in an urban environment.
In a concurrent trend, increasingly automated ground vehicles demand ever-stricter lateral positioning to ensure safety of operation. An influential study calls for lateral positioning better than 20 centimeters on freeways and better than 10 centimeters on local streets (both at a 95% probability level). Such stringent requirements can be met by referencing lidar and camera measurements to a local high-definition map, but poor weather (heavy rain, dense fog or snowy whiteout) can render this technique unavailable.
On the other hand, progress in precise (decimeter-level) GNSS-based ground vehicle positioning, which is impervious to poor weather, has demonstrated surprisingly high (above 97%) solution availability in urban areas. This technique is based on carrier-phase differential GNSS (CDGNSS) positioning, which exploits GNSS carrier-phase measurements having millimeter-level precision but integer-wavelength ambiguities.
Key to our promising results is the tight coupling of CDGNSS and inertial measurement unit (IMU) data, without which high-accuracy CDGNSS solution availability is significantly reduced due to pervasive signal blockage and multipath in urban areas. Tight coupling brings millimeter-precise GNSS carrier-phase measurements into correspondence with high-sensitivity and high-frequency inertial sensing. Our particular estimation architecture incorporates inertial sensing via model replacement, in which the estimator’s propagation step relies on bias-compensated acceleration and angular rate measurements from the IMU instead of a vehicle dynamics model.
As a consequence, at each measurement update, an a priori antenna position is available whose delta from the previous measurement update accounts for all vehicle motion sensed by the IMU, including small-amplitude high-frequency motion caused by road irregularities. Remarkably, when tracking authentic GNSS signals in a clean (open-sky) environment, the GNSS carrier-phase predicted by the a priori antenna position and the actual measured carrier phase agree to within millimeters.
The research described in this article pursues a novel GNSS spoofing-detection technique based on a simple but consequential observation: it is practically impossible for a spoofer to create a false ensemble of GNSS signals whose carrier-phase variations, when received through the antenna of a target ground vehicle, track the phase values predicted by inertial sensing. In other words, antenna motion caused by factors such as road irregularities or rapid braking or steering is sensed with high fidelity by an onboard IMU but is unpredictable at the sub-centimeter-level by a would-be spoofer.
Therefore, the differences between IMU-predicted and measured carrier-phase values offer the basis for an exquisitely sensitive GNSS spoofing-detection statistic. What is more, such carrier-phase fixed-ambiguity residual cost is generated as a byproduct of tightly coupled inertial-CDGNSS vehicle position estimation.
Two difficulties complicate the use of fixed-ambiguity residual cost for spoofing detection. First is the integer-ambiguous nature of the carrier-phase measurement, which causes the post-integer-fix residual cost to equal not the difference between the measured and predicted carrier phases (as would be the case for a typical residual), but rather modulo an integer number of carrier wavelengths. Such integer folding complicates development of a probability distribution for a detection test statistic based on carrier-phase fixed-ambiguity residual cost.
Second, the severe signal multipath conditions in urban areas create thick tails in any detection statistic based on carrier-phase measurements. Setting a detection threshold high enough to avoid false spoofing alarms caused by mere multipath could render the detection test insensitive to dangerous forms of spoofing. Reducing false alarms by accurately modeling the effect of a particular urban multipath environment on the detection statistic would be a Sisyphean undertaking, requiring exceptionally accurate up-to-date 3D models of the urban landscape, including materials properties.
Our work takes an empirical approach to these difficulties. It does not attempt to develop a theoretical model to delineate the effects of integer folding or multipath on its proposed carrier-phase fixed-ambiguity residual cost-based detection statistic. Rather, it develops null-hypothesis empirical distributions for the statistic in both shallow and deep urban areas, and uses these distributions to demonstrate that high-sensitivity spoofing detection is possible despite integer folding and urban multipath.
A unique workflow enabled by scanning robotic total stations is the simultaneous operation, with the same data controller and software, of a GNSS rover while scanning and imaging are being performed. Pictured: a Trimble SX12 and R12i GNSS. (Image: Gavin Schrock)
Scanning capabilities, in one form or another, have been added to models of robotic total station (RTS) since 2007 — for instance, on the Trimble VX. Such capabilities were limited to a pattern of individual shots, as the RTS would “nod.” While not designed to compete with traditional scanners, even such painfully slow “pseudo-scanning” capabilities demonstrate the value of new options for capturing detailed features.
It was not long before nearly all RTS offered limited (nodding scanning) capabilities, though at rates as slow as 15 shots per second. By 2013, the release of the Leica MS50 took the nodding scan to the next level, with a rate of up to 1,000 points per second, and then up to 30,000 in the subsequent MS60 model (which now also supports a tilting prism pole).
The end of 2016 saw the release of Trimble’s SX10 (and SX12 more recently). This routed the laser through a pair of rotating prisms to capture a swath of points as it nodded. In 2019, Topcon took the approach of adding a piggy-backed compact conventional scanner to the top of an RTS: the GTL-1000 and GTL-1200 models.
All these implementations were built upon high-quality RTS. Foremost, they can be operated as an RTS, with all the same integrated surveying capabilities as instruments with which surveyors were familiar, and in the same field software.
This includes all the integrated GNSS workflows: resections, combining optical and GNSS captured points in the same survey, and adding a rover to the prism pole for track-on-GNSS methods. One huge advantage of scanning total stations is instant deliverables already fully registered, as adopters of these new systems quickly realized.
Some initial users seemed skeptical of the relatively slow scan rates of these various models: 12 to 30 minutes for full-dome scans, and then a photo capture pass. Others, though, discovered that the time did not necessarily need to go to waste.
First, it is not necessary to do a full-dome scan and image pass every time; it is sufficient to pre-select specific areas to scan and image.
The real kicker is that while the RTS is scanning, it is possible to fire up the GNSS rover and capture points that the RTS cannot see, such as behind curbs, cars and vegetation. This is true especially now, with the advent of no-compensation tilt capabilities on nearly every new GNSS rover system.
This can be done in the same project, using the same software and field controller. This struck this writer as one of the coolest lateral features of scanning total stations when he first tried out an SX10 in 2017.
Considering the benefits scanning total stations deliver (especially with the integrated GNSS bonus), what has the reception been like among surveyors and other segments of the architecture, engineering and construction (AEC) community?
“As an industry, we’re getting better at tying solutions and workflow elements together, and not seeing them, or treating them, as individual functions or pieces of hardware,” said Derek Shanks, director of Geospatial Optical Product Management for Trimble. “We bring the system aspect, a case of using the best tool, using the strengths of each tool to their fullest.”
Accoring to multiple manufacturers, sales numbers indicate that the adoption of scanning total stations for AEC applications — and not just surveying — has exceeded expectations.
Douglas County Public Works needed a GNSS rover to support its UAS operations. The pay-as-you-go option was appealing as they only needed high-precision a few times per month. (Image: Jason Schilling)
High precision GNSS rovers play a vital role in a broad variety of field surveying and mapping applications. Different users have different value propositions in mind when choosing field hardware and software: expected precision, sources of corrections, configurations for specific workflows, and, of course, cost. Weighing these many considerations, GNSS manufacturers have come up with portfolios of multiple models to fill these varied needs.
That said, GNSS manufacturer Bad Elf took a different approach when it designed its flagship rover, the Bad Elf Flex. The Flex is designed to meet the cost-precision-workflow needs of everyone, from asset mappers to surveyors. (Hence the name “Flex.”) To inform the design of the Flex, Bad Elf listened to field users who wished for a scalable solution in a single rover, rather than having to buy multiple different models, and without breaking the bank.
Options for the Infrequent User
“I had one of the little Bad Elf GNSS surveyor handhelds for many years,” said Jason Schilling, wildlife biologist with Douglas County Public Utility District in central Washington State. “That worked great for rough mapping, between a foot and a meter of precision, and I could connect it via Bluetooth to mapping software on my mobile.”
But this all changed when Schilling began an unmanned aerial system (UAS) program for the utility several years ago.
“I really needed survey-level precision for ground control points to geolocate the images from the UAS,” said Schilling.
He was aware of the high cost of centimeter-precision-capable surveying rovers and it was too big of an investment, considering that he only did UAS mapping a few times a month. As an existing Bad Elf customer on the company mailing list, Schilling learned about the new Flex rover, which offered multiple options, and he found one that seemed quite enticing for the needs of his utility.
Schilling purchased a Flex Standard bundle at a low base price, about $3,000, with the pay-as-you-go plan for high precision. In the standard configuration, the Flex is capable of autonomous positioning (1–5 m), and mapping grade (sub-meter precisions) via free satellite-based augmentation services (SBAS), such as WAAS. But when the user activates a pre-purchased “token,” the full centimeter-precision capability, using external corrections, is enabled.
“On the day of a UAS survey, we turn it on, activate a token from our account, and then we have 24 hours of high precision,” Schilling said. “It costs us $25 per day.”
For two to three UAS surveys a month, this works out to far less over many years than the cost of buying a typical surveying rover.
Correction Sources
For real-time kinematic (RTK) corrections, Schilling connects via NTRIP to the statewide cooperative real-time network (RTN); sometimes in a network RTK mode (such as VRS) or single-base RTK to a nearby reference station on the same network. The Flex accommodates NTRIP connections to RTN or IP-enabled reference stations, but Bad Elf has added even more flexibility for corrections.
In some scenarios there is no access to an RTN or no cell service (needed for NTRIP access). One option in these cases is to add a second Flex, set it up as an RTK base, and connect the base and rover via radios that Bad Elf offers.
Bad Elf has added other options for corrections: the Bad Elf RTK service taps into a nationwide real-time network operated by Point One Navigation. This is accessible via NTRIP in the same manner as regional, state or local RTN, and is offered for a monthly fee. In addition, for situations where there is no RTN or cell service, a global precise point positioning (PPP) service (Atlas) can be enabled on the Flex.
PPP differs from RTK/RTN in that it does not need the dense arrays of reference stations, or cell service to access. Instead, PPP derives very precise clock and orbit data from a global array of tracking stations and delivers this to the Flex via geostationary satellites. After a short convergence time, PPP from the Atlas service will yield 5 –10 cm precision over most of the globe.
The Full Boat
Full Configuration. Brian Cortese works for the City of Ellensburg, where he uses the FLEX Extreme Bundle for multiple field applications. (Image: Brian Cortese)
The City of Ellensburg, a college town and farming community in central Washington State, chose the Flex Extreme bundle for about $6,000 — the “full boat” configuration. The Extreme bundle enables all the add-on services all the time, eliminating the need for tokens. In their case, the frequency of use made the higher initial investment worthwhile.
“We have big plans for our rovers,” said Brian Cortese, Engineering Tech/Inspector for the City of Ellensburg Public Works & Utilities.
Ellensburg is a vibrant town that is attracting a lot of new development and it is being proactive in surveying and mapping assets as they are added or replaced.
“We’re recording manholes and valves, sewer systems, storm water systems, irrigation, hydrants — everything that gets built in the city gets as-built surveyed,” Cortese said. “Precise, real-time positioning, it’s been a benefit to us already. We can go out before they work on the subgrade for new developments and take measurements, and then when they finish the subgrade and pave it, we can go back and locate those exact positions.”
Ellensburg uses corrections from the statewide cooperative RTN. In fact, one of the RTN reference stations —also part of the NOAA National CORS Network — is right in the center of town atop the science building of Central Washington University. While the city does a wide variety of surveying and mapping, with the Flex and RTN corrections surveyors get the same centimeter-precision for everything they measure in the field.
“We’ve done design projects with it,” Cortese said. “For instance, we recently took measurements in an area of downtown for a proposal by recording positions and elevations to develop a new park and entertainment area for the community. We are also marking Americans with Disabilities Act (ADA) ramps to meet federal specs out in the field — it’s been really handy for so many things.”
Survey-Grade Rover
To serve the full range of precision needs, the Flex had to be designed as a survey-grade rover. It has a full-constellation GNSS and RTK engine: GPS, GLONASS, Galileo, BeiDou, and support for other regional constellations. With more satellites in view, it can perform in sky-view-challenged locations, such as around buildings and under tree canopy.
“Ellensburg is on the Tree City, USA list; our streets are very well lined with a variety of trees, which is also where a lot of our utilities are and development is going on,” Cortese said. “We have been able to get good precisions in and around those trees. Actually, someone on our staff is taking an inventory of the trees with the Flex and loading the data directly into ArcGIS.”
Even in the more rural areas of Grant County that enjoy a lot of open sky, Schilling said, some areas planned for mapping are along upper tributaries and in the hills with a lot of tree coverage. He said the Flex has performed well in those areas.
Choices
The Flex offers these options and combinations:
Flex Extreme. Full survey-grade rover that can use a variety of correction types.
Base-Rover RTK. Two Flex Extreme units connected via radio.
External RTN/RTK corrections via NTRIP.
Bad Elf RTK Service. Single-tap access to a nationwide RTK corrections service.
PPP service. Atlas PPP corrections via L-band geostationary satellites.
Flex Standard. Pay-as-you-go high-precision-enabled service using tokens.
Static Logging. Observation file logging for post-processing (supported by Flex Extreme).
Compatibility with multiple field-mapping software applications.
While many modern GNSS rover systems support one or more options similar to those listed above, Bad Elf’s Flex supports all of them, making it capable of a wide variety of applications.
Correction services enable farmers to pinpoint where to apply fertilizers so as not to waste any. (Image: artiemedvedev/iStock/Getty Images Plus/Getty Images)
Growing among the many options for GNSS corrections open to precision agriculture operators are tiered precise point positioning (PPP) services. Agriculture has had integrated GPS, and now GNSS, for decades. Ranging from individual RTK bases, networks of RTK bases and network RTK (RTN) to dedicated L-band satellite-delivered PPP, operators have been able to receive and apply the appropriate corrections for different crops and applications, from centimeters to meters.
Part of the appeal of such services, particularly for large agricultural concerns with mixed crops and operations, is having the full flexibility of tiered precisions. Additionally, near-global coverage has increased utilization.
“Specialty and high value crops require high accuracy,” said Michael Helling, senior director of strategy for Trimble’s autonomy group. “For instance, when drip tape is laid for fruits and vegetables, you would not want subsequent activities to be off more than an inch or so, to avoid cutting it. This is where RTK was essential, and a base was often set up, or an RTN accessed. But the RTX [Trimble’s PPP delivered by L-band satellites] high-precision option, CenterPoint RTX, easily meets those needs.”
Like some other PPP correction services, Trimble’s RTX also has lower precision subscription options: RangePoint for 15 cm and ViewPoint for 30 cm pass-to-pass accuracy. These services are also utilized outside of agriculture. For example, CenterPoint, delivering centimeter precision, is utilized for certain surveying and construction applications and FieldPoint for asset mapping. Trimble has also developed embedded solutions, based on the same core technology for, among other things, maritime, robotics, autonomous vehicle, and assisted driving applications.
Certainly many agriculture applications can suffice with lower precisions, such as broadacre crops, where there may be no need to maintain row-to-row and year-to-year repeatability. Where some amount of overlap between passes is acceptable, coarse navigation at sub-meter to meter precision may be all that is needed. However, as Helling notes, precision becomes addictive, and as the field equipment becomes more capable of positionally topical functions, many operators are stepping up in levels of precision.
“Farmers are more precisely testing fields with all kinds of sensors and seeing where the field actually differs in soil and nutrient content,” said Helling. “There are different approaches and value propositions. One is saying I need to fertilize this area better so that I can get a better yield. There are also situations where a specific area of the field might only produce to a certain level. Farmers can pinpoint where those areas are to apply fertilizers so as not to waste it and optimize their bottom line.”
For many agriculture applications, the reality is that you have a tractor pulling some other piece of equipment through a field.
“Think about sprayers, forever behind a tractor,” said Helling. “Our equipment can control a lot of things around the rate, precisely targeting specific pieces of a field or row. When you start thinking about sustainability, being able to turn the spray on and off where you’ve already sprayed, you can avoid overspray.”
Sensor integration helps automate the process.
“We just aquired a company in France called Bilberry; their technology is very effective at identifying weeds. You can identify what’s in the field and can decide how you’re going to treat it. The next immediate steps in automation for agriculture might not be full autonomy, but more automation in the equipment that’s being pulled, and sensors that inform what they do.”
While single-base real-time kinematics RTK can, under specific conditions, be the best option for certain applications in surveying and construction, corrections services typically eschew this solution in favor of network RTK, PPP, and PPP-RTK. There are, though, some agricultural networks made up of clusters of reference stations delivering RTK corrections. (Images: courtesy of Gavin Schrock and Courtney Townsend Bigmouse108/iStock / Getty Images/Gettu Images)
The boom in the development of corrections services for applications such as autonomy and robotics has brought a whole new slate of market players, and an expansion of services from established corrections providers. This has benefitted high-precision users as well as the new not-so-high-precision applications.
Whereas very high precision — centimeters — is of paramount importance to sectors such as precision agriculture, construction automation, surveying and mapping, new market sectors are less concerned with precision as they are with reliability, availability and resilience. There are many corrections services that can deliver reliable lane-level precision, decimeter precision, sub-meter or whatever the application requires.
Corrections have been around in various forms for nearly 30 years. Whereas traditional high-precision applications would access corrections services or network infrastructure directly, the user of a mass-market application, such as assisted or autonomous driving, receives corrections second or third hand.
A car manufacturer may install an integrated navigation and positioning system (GNSS is typically only one of many technologies in a complete system) from a vendor that receives corrections from one or more corrections services.
A Recap of the Technology
Uncorrected GNSS is limited to precisions in meters. This may be fine for many purposes, such as coarse navigation and local-based apps. However, for high precision uses, external augmentations (commonly referred to as “corrections”) add more and higher accuracy data to help mitigate multiple sources of error that otherwise limit standalone GNSS results. Various augmented data can be delivered via radio, the internet, or communications satellites. Delivery of augmentations by public or commercial generators of this add-on data is broadly referred to as “positioning services.”
Network RTK, implemented as real-time networks (RTN), covers hundreds of localities, states, and entire countries and is a go-to for many applications in surveying, mapping, construction, monitoring and agriculture. One disadvantage, compared to PPP, is reliance on terrestrial IP communications. (Images: courtesy of Gavin Schrock and Courtney Townsend Bigmouse108/iStock / Getty Images/Gettu Images)
There are two fundamental approaches to generating corrections: Observation Space Representation (OSR) and State Space Representation (SSR). OSR uses observations of one or more base receivers to derive correction values representative of local conditions. Examples of OSR include base-rover real-time kinematics (RTK) and network RTK (NRTK). SSR provides “states” of conditions derived from terrestrial tracking networks, to improve clock and orbit “products,” and may also include data from global, regional, or localized ionospheric and tropospheric models. Examples of SSR include precise point positioning (PPP) solutions.
Players in the corrections services sector include vendors who manufacture GNSS hardware, RTK systems, and NRTK software. One example is real-time networks (RTN), which have grown to cover hundreds of localities, states, regions, and even entire countries. Some of these vendors now operate their own wide region RTN. The same large vendors also have developed global PPP services. The most recent decade though has seen rapid growth in new corrections service providers that focus on one or more key markets and develop approaches specifically to serve them. For instance, many agricultural regions of the world have large clusters of RTK stations operated by a vendor or a cooperative. Some newer vendors, focused on the autonomy market, have developed global PPP services, regional NRTK, or hybrids for decimeter to meter precision. One Achilles heel of PPP is its relatively poor vertical precision compared to RTK and NRTK. This partly explains why adoption has been slow for certain high-precision applications, such as surveying.
Where corrections services have become quite interesting, is in amalgams of these approaches. In recent years, the rapid expansion of corrections services for mass-market applications has given rise to what developers call PPP-RTK. Ostensibly, this is to take advantage of the strengths in each approach, however it may be more about trade-offs between precision and the practicalities of serving wide regions in a cost-effective manner. There are many variations on how this hybridization is achieved; for example, PPP- ambiguity resolution (PPP-AR). PPP-RTK can be somewhat of a nebulous term, much in the same way as the term “AI” gets used. Developers of the specific PPP-RTK approaches for the many corrections services keep certain details close to their chests. Clients are less concerned with how it works as they are with the results.
Examples of Vendors
In compiling the following list, we tried to provide examples of all aspects of the corrections service industry — from GNSS network software development to hosting of national and regional networks to providing global PPP. This segment continues to grow; new players continue to develop solutions and enter the market, some with great fanfare, while others seek to stay under the radar. This list does not include the many hundreds of RTN worldwide — local, regional, or national — though the key providers of the NRTK software these networks use are listed.
One advantage of PPP and PPP-RTK over RTK and NRTK is that they can deliver augmentations by satellites, eliminating reliance on terrestrial communications networks. Satellite delivery has a downside: the number of communications satellites broadcasting the augmentations is limited, which can be problematic in sky-view challenged areas. (Image: courtesy of Gavin Schrock and Courtney Townsend Bigmouse108/iStock / Getty Images/Gettu Images)
Note that other vendors are also not listed, such as some that seek to limit their visibility to specific clients and partners. For example, some offer corrections services as an adjunct to inside hardware/software sales, and others work with developers of certain integrated navigation/autonomy systems. In addition, some of the smaller vendors may be working in conjunction with some of the more established developers, often licensing elements of their software, and in many instances piggybacking on their global tracking networks.
In alphabetical order: Atlas. From Hemisphere GNSS. A global PPP service delivered by L-band satellites. It includes tiered precision for different applications, such as surveying, mapping, and asset management. Atlas Basic, Atlas H30, Atlas H10: bit.ly/3V42qxj. CHCNAV. CPS NRTK software: bit.ly/3FI6zlN. It also hosts various RTN and has a global network partner program: bit.ly/3VQugOr. CNH. Advance Farming Software (AFS) RTK+ network delivering corrections mostly via cellular to primarily precision agriculture users: bit.ly/3YiCZur. DigiFarm. DigiFarm VBN. An example of another network that serves primarily agriculture users, however, it now has a spinoff to serve other high precision markets: bit.ly/3hgnYZs. eSurvey. GNSS NET, a VRS management software: bit.ly/3Py0uMp. Fugro. Global PPP corrections services; tiered precision for various applications, mostly maritime and marine construction. StarFix, SeaStar, MarineStar, OceanStar: bit.ly/3W4LkA8. Geo++. One of the first developers of GNSS network and PPP solutions. Its GNSMART software suite provides NRTK and SSR broadcast capabilities: bit.ly/3FhGE2Z. HERE Technologies. HD GNSS, a PPP-RTK solution for mass-market applications: bit.ly/3Fnle4H. Hi-Target. Hi-RTP, a global PPP- RTK service: bit.ly/3hi2xHv. IGS. International GNSS Service, a federation of agencies and research entities with a global tracking network of more than 400 reference stations. The IGS is a vital component of the global geodetic infrastructure. RTS is its real-time PPP service. It is not fast converging like many of the commercial services, but it is free for many applications. It is not broadcast via satellites, only via the internet: igs.org. Leica Geosystems. Part of Hexagon. Provider of NRTK software (Spider), and host of its own RTN covering various regions around the world (SmartNet), and global PPP (SmartLink): bit.ly/3uEwHb9. NovAtel. Part of Hexagon. Includes various tiers of PPP-RTK: RTK Assist, RTK Assist-Pro*, TerraStar-L, Oceanix, TerraStar-C PRO*, and TerraStar-X* (what NovAtel calls“RTK From the Sky”): bit.ly/3HzuqWh. Point One. RTK correction service called Polaris, available also via partners such as Bad Elf: bit.ly/3uPJGqA. Premium Positioning. RTKcorrections service called RTK Premium: bit.ly/3uT0xZi. Rx Networks. A mix of tiered positioning approaches for location- based applications. Truepoint. io (DGNSS, PPP, PPP-RTK): bit.ly/3We1rvT. SBAS (Public). Satellite-based augmentation systems, national or regional services. Like commercial PPP, SBAS corrections are mostly served via satellites. Public safety and civil aviation are the primary drivers for providing such services. For instance, in North America, the Wide Area Augmentation System (WAAS) was chartered by the Federal Aviation Administration (FAA). There are equivalent systems in Europe (EGNOS), India (GAGAN), Japan (MSAS and QZSS), Russia (SDCM), China (SNAS/BDSAS, which is still in development) and Australia and New Zealand (SouthPAN). Other systems are in development in South America and the Caribbean (SACCSA), Korea (KASS) and in Africa and the Indian Ocean (ASECNA). Sino/Comnav. CDC.NET CORS software, RTN software: bit.ly/3W56hvm. Swift Navigation. Skylark RTK and Skylark DGNSS services: bit.ly/3HyWVn5. Tersus GNSS. Tersus Advanced Positioning (TAP), a PPP service: bit.ly/3hoZkWD. Topcon. TopNet and Topnet Live. RTN Software, regional RTN, and PPP services: bit.ly/3FRRcaw. Trimble. RTN software, VRS Now (regional RTN), and tiered PPP services: CenterPoint RTX, RangePoint RTX, ViewPoint RTX, and FieldPoint RTX: bit.ly/3V3bbax. u-blox. PointPerfect regional PPP and PPP-RTK: bit.ly/3FPVmQo. Veripos. Part of Hexagon. Tiered global PPP services, originally focused on maritime applications: Standard, Ultra, APEX: bit.ly/3BBjfsf. Verizon. Telecom infrastructure-based PPP-RTK service called ThingSpace: bit.ly/3Fw1U55. Vodaphone. Currently developing corrections services in conjunction with Topcon: bit.ly/3Pug4s0.
Whatever the application, there are now many options for corrections services. Non-mass-market applications, for traditional high- precision uses, have been tapping such services for (in some cases) decades. The prize of primacy in the autonomy market has been in the sights of many of these vendors for many years, yet there have been relatively few real-world applications to date. That should be changing soon. Early adoptions such as GM’s Super Cruise, which is powered by the same core PPP technology as RTX, have been quite successful. Which will come out on top? That might be a moot question. With the potential of such markets so great, perhaps there is room for all of them, and more.
The WeWALK cane attachment and app was produced with partnerships with Microsoft and Imperial College London. (Image: WeWALK)
While some may only think of GPS technology as a convenience when driving a car or hiking, for many, GPS is a necessity. Through navigation devices, adaptable software, and mobility aids, GPS technology has become a vital part of accessibility efforts to support people with hearing loss, deafness, or visual impairments.
The World Health Organization estimates that at least 2.2 billion people are living with a vision impairment, and 430 million people are living with a disabling level of hearing loss. For these billions of people, everyday tasks such as navigating a new city or using public transportation can be a challenge. GPS technology gives people the independence needed to meet these challenges with confidence.
Damato
GPS technology in handheld navigation devices and adaptable software promotes accessibility and assists individuals with daily tasks. Accessibility features that rely on GPS technology can give users turn-by-turn directions to any destination, detailing the terrain, surroundings, and even relevant bus or metro stops along the way. Vibration signals complement voice directions to help users navigate busy areas and intersections regardless of visual or hearing abilities. These accessibility features make new spaces more accessible to people with vision and hearing loss by leveraging the ease and accuracy of GPS navigation technology.
Through innovative technologies and accessibility features, GPS also enables users to explore their surroundings. The “around me” feature on many GPS applications will read aloud descriptions of, and distances to, businesses, street names, and transportation options in the surrounding area. These resources allow individuals with hearing or vision loss to explore their communities and complete daily tasks worry-free. Interactive applications let users move their fingers along a screen while the device reads out street names and provides directions, helping users find their way in unknown locations. This ensures users have all the information they need to be confident exploring new places on their own.
In addition to helping individuals with vision and hearing loss navigate their surroundings, GPS technology also promotes safety and ensures individuals can be quickly located in the event of an emergency. For example, location tracking apps allow users to share their exact location with family and caretakers, promoting individual autonomy while also ensuring safety. If an emergency does occur, GPS technology helps emergency services quickly and accurately locate individuals and provide care.
From navigational accuracy to safety monitoring, the GPS Innovation Alliance (GPSIA) is proud to support the role of GPS technology in creating a safe, more accessible world for individuals with hearing or vision loss. Innovations in GPS technology, such as real-time location information and direction signaling, are changing the field of accessible technologies. GPSIA will continue to advocate for policies that promote and support the application of GPS in this field, encouraging all individuals to confidently lead an independent life.
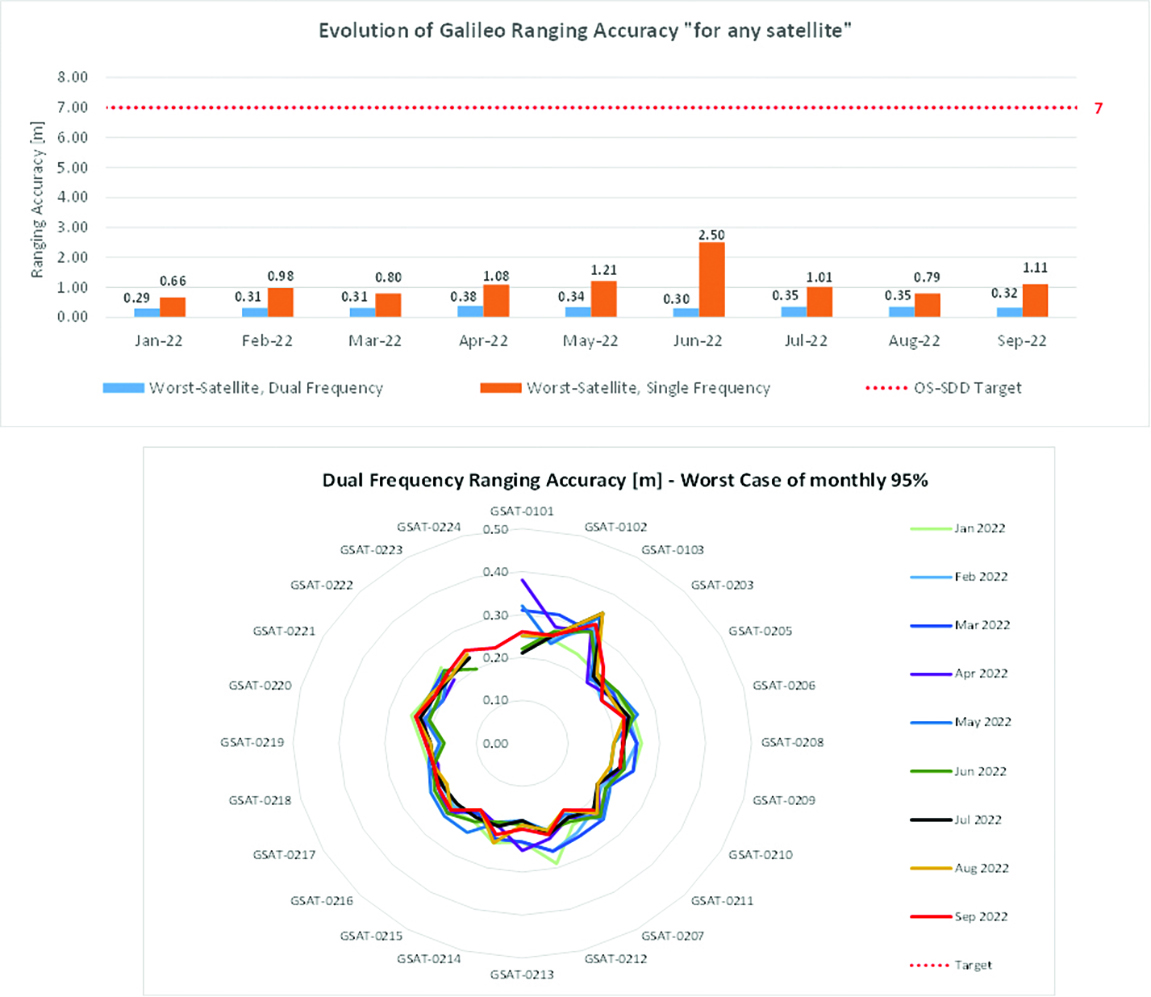
In 2022, the Galileo GNSS continued to provide the world’s most precise satellite navigation information, to a user base that stands at more than 3.5 billion worldwide. Furthermore, provided services continue to improve and expand, with plans for high-accuracy positioning and signal authentication now reaching fruition.
The European Union Agency for the Space Programme (EUSPA) and the European Space Agency (ESA) continue to enjoy an effective collaboration on the many development, deployment, and evolution activities of the Galileo Programme — each according to their respective responsibilities for service provision and system development with the European Commission (EC) acting as the program manager.
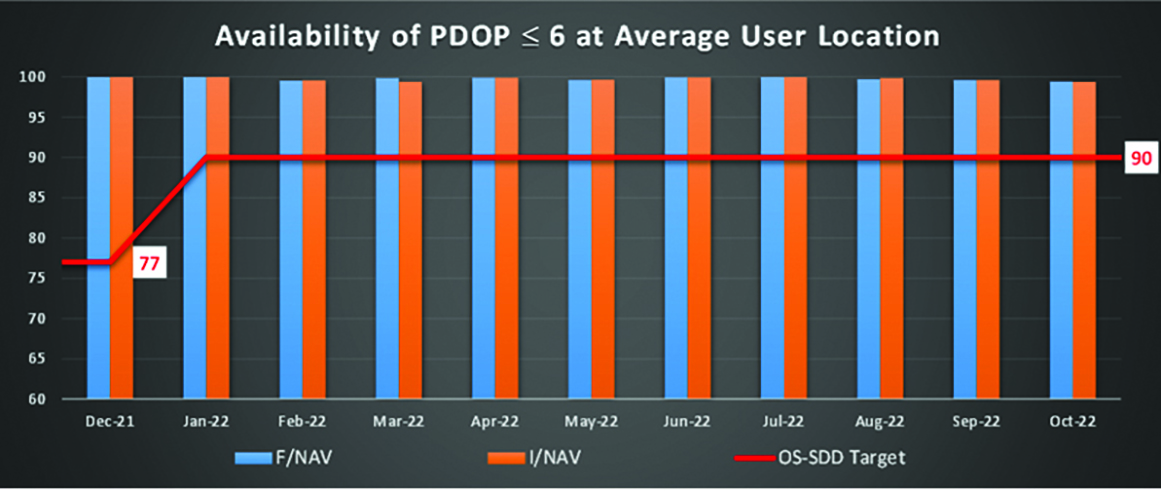
Ranging accuracy performance from January to September 2022.Positioning-related MPLS from January to October 2022.
New Services Launched in 2022
Excellent Performance
Service delivery operations and maintenance of operational systems are managed by EUSPA, which supervises many contracts that carry out the day-to-day activities from dedicated control and monitoring centers throughout Europe. In 2022, Galileo timing, navigation, and SAR/Galileo services were delivered with excellent performances that continue to exceed the formal declarations for minimum performance levels (MPL), which were increased in January, both in terms of absolute accuracy and overall service availability. The entry into service of two additional satellites in May and August, have further consolidated the overall service availability to end users.
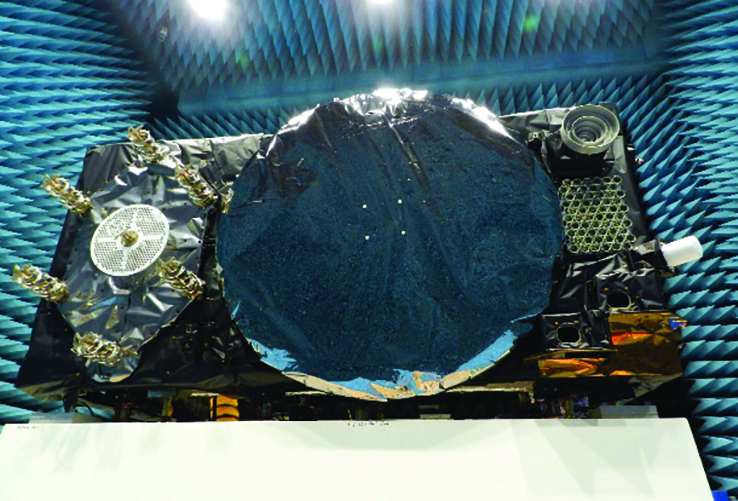
Galileo FOC Batch 3 satellite under testing.
Expansion of Service Portfolio
The service provision teams have been able to focus on improvements to, and expansion of, the service portfolio.
The I/NAV improvement will positively impact end users by enabling a faster time to first fix, and updates to the data validity status flags will lead to better protection of users against expired navigation data. These changes are implemented in updates of the onboard software of the satellites being rolled out across the constellation. At present, seven operational satellites have been successfully updated; the complete software upgrade campaign is planned to be completed this summer.
Galileo’s new High Accuracy Service will provide free precise point positioning (PPP) corrections, in the Galileo E6-B data component and by terrestrial means, for Galileo and GPS (single and multi-frequency) to achieve real-time user position improved by up to 10 times. The infrastructure to support an initial service (Phase 1) is nearing completion, and the formal declaration of the service capabilities is planned for early this year.
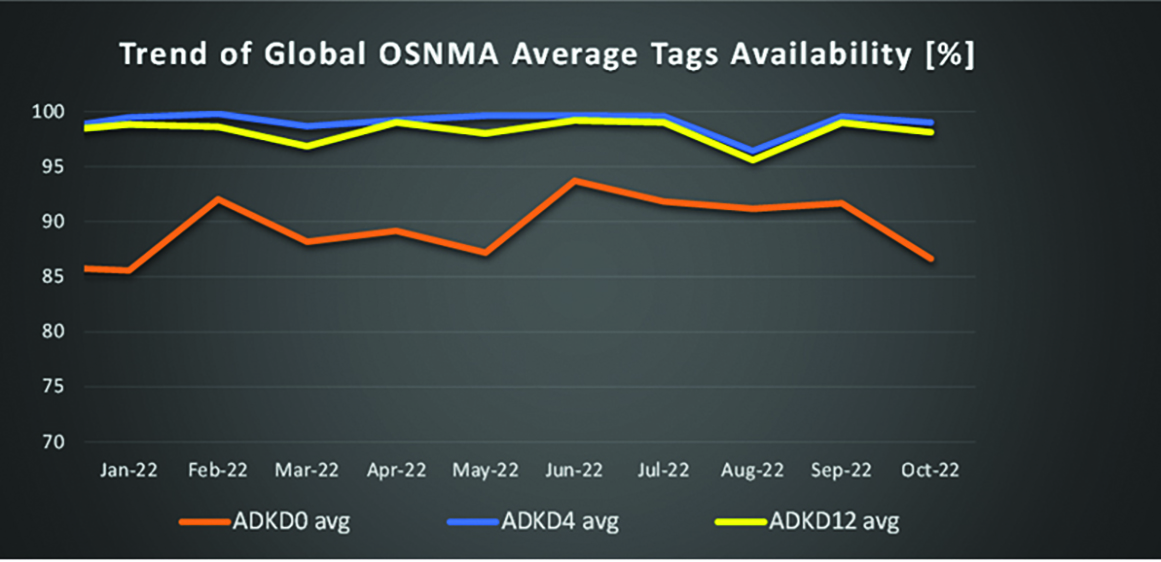
To provide users with a method of authenticating the received Galileo signals, especially the satellites ephemerides and the Galileo timing parameters, the new Open ServiceNavigation Message Authentication (OSNMA) service enables a receiver to confirm that a navigation message originated from the EU Galileo infrastructure. Many application areas are expected to benefit from this capability, including smart tachographs, telematics and logistics, UAVs, location-based services, and timing services. Having successfully demonstrated the technology behind the service in 2022, including a public observation phase, the roll-out of the Initial Service is planned to take place by the end of the year.
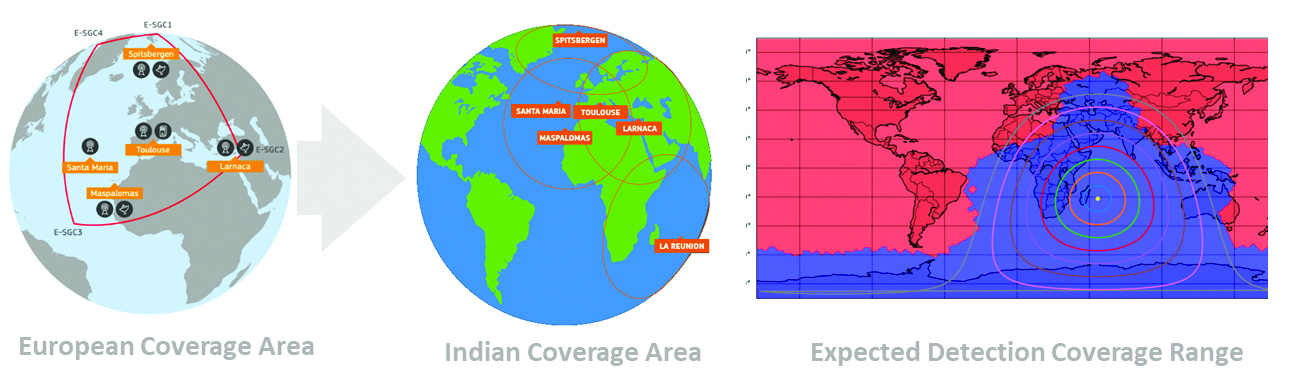
A fourth Medium Earth Orbit Local User Terminal (MEOLUT) in La Réunion will extend the SAR/Galileo Forward Link Service Coverage Area over the Indian Ocean as part of the SAR/Galileo full operational capability (FOC) declaration expected in the first quarter of 2023. The Cospas-Sarsat commissioning of this new station was completed in September 2022, and operational data is already being distributed to Cospas-Sarsat.
Reference documents for the above services can be found at the EUSPA European GNSS Service Centre website, including technical notes, interface control documents and service declaration documents.
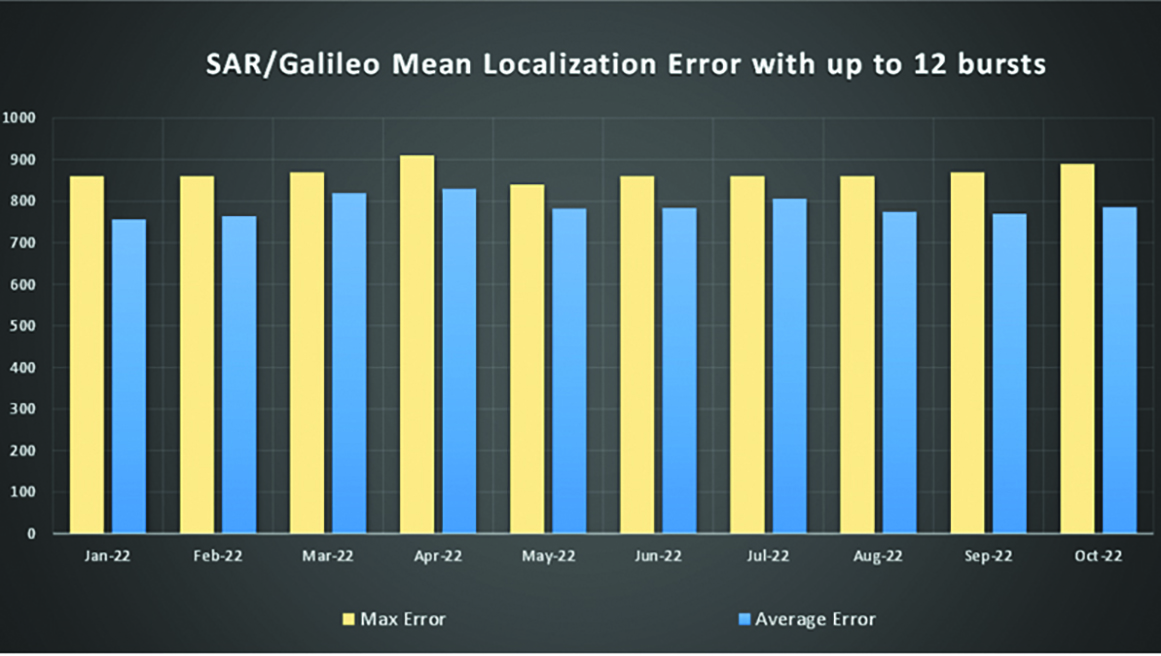
SAR/Galileo-related metrics from January to October 2022.Extension of the SAR/Galileo Forward Link Service Coverage Area over the Indian Ocean.
FOC Infrastructure Development Nears Completion
Satellite Production
The production of the third batch of Galileo FOC satellites advanced further in 2022 with the completion of the environmental tests and the system compatibility test campaigns at the European Space Agency Test Centre in Noordwijk, The Netherlands. After 10 years of successful testing, on Oct.18, 2022, the last Galileo FOC satellite (flight model number 34) left the test center to return to the premises of the satellite manufacturer, OHB Systems, in Germany. Testing of the remaining 10 satellites has confirmed that they have been correctly built and will perform well in orbit. The acceptance review of the last couple of satellites will take place this summer.
At the beginning of 2023, the plan is to start in-orbit testing of a quasi-pilot signal on the E5 frequency using the Galileo GSAT201/202 satellites in elliptical orbit. The provision of a signal offering coarse acquisition in Galileo E5-A/GPS L5 can be a distinguishing feature for Galileo with respect to all other constellations to further improve the capability to acquire the E5 signal at low complexity. Following in-orbit testing, the strategy for roll-out of this capability will be assessed with the involvement of receiver manufacturers.
New SAR Galileo MEOLUT facility in Réunion island.
Access to Space
The discontinuation of Soyuz launch services from the Kourou Space Centre in French Guiana, because of the Russia-Ukraine conflict, has caused delays in the two Galileo launches that had been planned for 2022. The Launch 12 campaign had to be interrupted and in March 2022 the FM25 and 26 satellites were put in storage at the Kourou launch base, then returned to Europe in November.
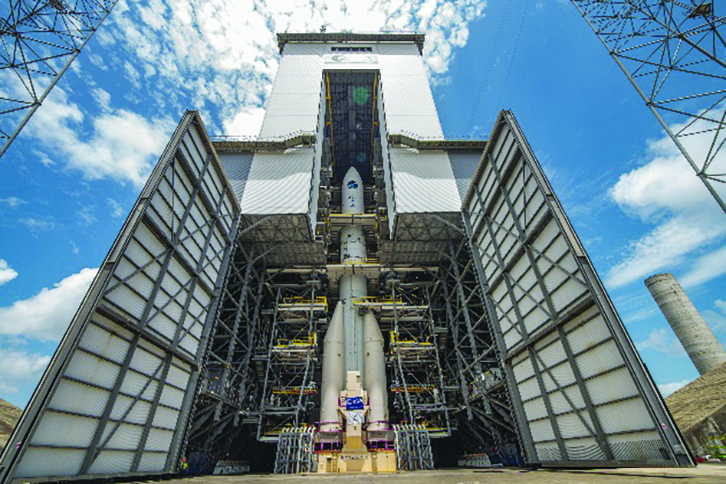
Ariane 6 is the baseline launcher for Galileo satellites to ensure European independent access to space. The remaining Batch 3 satellites will be launched with the Ariane 62 launcher vehicle, the two strap-on solid booster variants of Ariane 6, now undergoing the final stages of development led by prime contractor Ariane Group. Ariane 6’s maiden flight is scheduled to take place in the fourth quarter of 2023.
Ground Segment
An upgrade of the ground control segment, in charge of command and control of the satellite constellation, is being developed by the industrial consortium led by GMV. The upgrades will address resolution of hardware and software obsolescence including cyber security, operability improvements, and a security monitoring overlay.
With the planned increase in the number of satellites in orbit, an additional telemetry tracking and control facility (TTCF) is being deployed in Kourou leading to seven operational TTCF stations in early 2023.
The ground mission segment, in charge of navigation control, is undergoing a complete technological refresh, including hardware/software virtualization performed by an industrial consortium led by Thales France. This upgrade will provide additional robustness, including a system extended contingency mode resilient to outages lasting up to seven days and a new state-of-the-art cyber security monitoring system. It will also provide ranging authentication through encrypted codes on the E6-C signal component for the implementation of the Commercial Authentication Service. Global coverage will be further increased with the introduction of two Galileo sensor stations in Wallis (Pacific Ocean) and Bonaire (Caribbean Sea), for a total of 15 sites around the globe.
OSNMA-related metrics from January to October 2022.
G2G Development Started
Galileo’s second generation (G2G) will introduce many innovative technologies to offer unprecedented precision, robustness, and flexibility.
2022 was a key year for the evolution of G2G activities with the fast development cycles of the first batch of G2 satellites, beginning development of the associated G2G in orbit validation (IOV) ground segment and system test beds, and the consolidation of the G2G final system capabilities — including the coordination of the mission/service roadmaps with the EC, EUSPA, and the EU Member States delegates.
Ariane 62 launcher.
G2G Satellite Manufacturing
From the satellite development point of view, the two parallel contracts to develop and manufacture each of the six G2G batch one (G2SB1) satellites are progressing in a fast development environment, with the first hardware units ready for integration and testing.
Following the completion of preliminary design review, these two contracts (for six satellites each) are preparing for unit-level validation/testing, which will lead to the critical design review.
These satellites will provide the following key innovations:
Reconfigurable fully digital navigation payload
Point-to-point connection between satellites by inter-satellite-link for command and control, and ranging functionalities
Electric propulsion for orbit-raising capabilities
Advanced jamming and spoofing protection mechanisms to safeguard.
The Galileo signals will improve with:
On-board authentication capabilities
Increased ground-to-space data rate
Improved time reference (number of clocks and advanced clock monitoring functions).
G2G IOV Procurements
2022 was also the year in which two key events took place with respect to G2G in-orbit validation (IOV) ground segment and system test bed procurements:
Finalization of the procurement cycle, now in the final evaluation/award phase, to be kicked off in the first quarter of this year
Confirmation of the IOV design through different coordinated actions with the EC and EUSPA, including the G2 system preliminary design review.
The contracts will provide Europe with the following capabilities:
G2SB1 satellite launch and early orbit phase, in-orbit testing and enhanced legacy services provision
G2 new capabilities in-orbit validation, including prototyping and validation of all the novel technologies that can exploit the full capabilities of the G2SB1 satellites.
Eleven contracts will be issued to manage in synchrony all the G1 and G2 assets for the coming years:
G2 IOV ground control segment (G2 GCS) for satellites monitoring and control
G2 IOV ground mission segment/secured facility (G2 GMS-GSF) for the production, dissemination and monitoring of all enhanced legacy services and the dissemination of new G2 advanced capabilities for validation
G2 IOV security monitoring (G2 SECMON), for the cyber/security monitoring of the system
G2 filling device (G2 FD), to ensure proper initialization of system assets
G2 system test bed (G2STB), to generate and monitor new G2 capabilities for validation of the G2G mission/services
G2 PRS test bed (G2PRSTB), similar to G2 system test bed but focused on advanced PRS capabilities for validation purposes
G2 security chain (G2SC), a test bed to ensure proper satellite-ground segment qualification before launch
Four system engineering support contracts (G2 SETA), where the main GNSS technical experts from different industries in Europe provide their support to ESA and EUSPA in their different fields of expertise.
These contracts are complemented by a significant set of system research and development and test tools, such as test user receivers and radio frequency constellation simulators.
G2G batch number one (G2SB1) satellites.
Galileo Second Generation System PDR
The Galileo Programme is not only focusing on short-term G2G development activities, but also looking forward to the future in terms of the consolidation and definition of G2G final operation capabilities. During the second half of 2022, more than 200 public representatives from the EC, EUSPA, ESA and Member States held countless meetings in the frame of the G2G system preliminary design review, which concluded in early December 2022.
As part of this review, the long-term implementation (G2G in orbit capability, or IOC, and final operational capability, or FOC) was reviewed and an agreement was reached on future steps. The evolution of Galileo capabilities will not only provide better services through advanced technical solutions, but will also ensure continuity of service and enhanced backward compatibility for first-generation legacy users.
Conclusions
The efforts of ESA and EUSPA continue with the aim of providing users continuous and stable services and evolving space and ground infrastructure to maintain Galileo competitiveness with the other global navigation satellite systems.
For analogous updates on the other three GNSS constellations, please see:
In 2022, the BeiDou Navigation Satellite System (BDS) continued to improve its service performance, expand global applications, and deepen and promote international cooperation.
On Nov. 4, 2022, a white paper titled “China’s BeiDou Navigation Satellite System in the New Era” was published. The paper shows the continuous, stable and reliable operational capability of BDS, its applications achievements across the industries, international development with openness and integration, and unremitting pursuit of helping to build a community with a shared future for humanity and a better world.
System Services Performances
In orbit are 45 BDS operational satellites, including 15 BDS-2 satellites and 30 BDS-3 satellites. Figure 1 shows the number of visible BDS satellites worldwide as of BDT 06:00 on Dec. 6, 2022.
Figure 1. Number of visible BDS satellites. (Image: www.csno-tarc.cn)
BDS has reached a continuity of 99.996% and an availability of 99%. The innovative constellation involves inter-satellite links, signal system optimization, intelligent operation and maintenance, software reconstruction and upgrading of in-orbit satellites, and global test and assessment.
As measured by the International GNSS Monitoring and Assessment System (iGMAS), the BDS global positioning accuracy is less than 1.5 m horizontally and 2.5 m vertically (95% confidence) — better than the nominal service performance parameters.
So far, the measured signal power spectrum envelope of the BDS satellites remains consistent with the superior signal quality; the signal-in-space accuracy of any BDS satellite is better than 4.6 m. The time offset between BDT and UTC (NTSC) remains within 26 ns.
The BDS Coordination Framework has maintained consistency with the International Terrestrial Reference Frame 2014, and the accuracy is better than 3 cm. The orbital accuracy of the broadcast ephemeris of the BDS-3 medium Earth orbit (MEO) satellite is better than 0.5 m, and the clock offset of the broadcast ephemeris of the BDS-3 satellites is better than 5 ns.
BDS concentrates on construction of the application infrastructure and has established four major characteristic service platforms:
Short Message Communication Service
Satellite-based Augmentation System Service
Search-and-Rescue Service
Ground Based Augmentation System Service.
These platforms will expand and upgrade the applications and provide more efficient and convenient services for users.
The BDS Short Message Communication Service platform realizes the interconnection with ground mobile communication systems and networks, and integrates the BDS short message communication functionality into smartphones without the need to change the SIM card or contact number.
For the BDS Satellite-based Augmentation System Service platform, the system’s ground segment includes 30 monitoring stations and two data processing centers. The system will provide single frequency (SF) and dual-frequency multi-constellation (DFMC) services through GEO satellites. The Civil Aviation Administration of China has initiated and organized the technical testing and certification of SF service before applications.
The BDS Search-and-Rescue Service provides users with distress alert information access and distribution, as well as return link services. It is currently at the initial operational stage with sound performances. The operational status of the BDS SAR payload has been submitted to Cospas-Sarsat.
The BDS Ground-Based Augmentation System Service platform’s real-time positioning accuracy can reach 2 cm horizontally and 5 cm vertically. The post-processing accuracy can reach 2 mm horizontally and 5 mm vertically. At present, the BDS ground-based augmentation network has provided the A-BDS positioning and the BDS high-precision services for more than 1.5 billion users in more than 230 countries and regions, with services delivered 2 trillion times in total, equivalent to nearly 3 billion on average per day. BDS has provided high-precision positioning services for more than 20 million mobile phones in the country.
The BDS Applications Industry
The BDS applications industry has achieved sustainable development. In 2021, the total output of China’s satellite navigation and location-based service industry reached about 469 billion yuan (about 67.4 billion U.S. dollars), with a compound annual growth rate of more than 20%. A complete industrial chain covering chips, modules, antennas, boards, terminals and services has been established.
Industrial applications. BDS has been fully applied in various industries — including transportation, agriculture, forestry and fishery, public security, disaster mitigation and relief — and has been integrated into infrastructure such as electric power, water conservation, finance and communications.
As BDS applications fields expand, its in-depth applications have been growing as well. As of June 2022, more than 8 million BDS terminals had been installed in the transportation sector. More than 1.3 million terminals were used in the farming, forestry, livestock and fishing industries, and more than 1.8 million terminals were adopted by public security agencies. Large-scale BDS applications have been advanced in communication and timing services, meteorological monitoring, emergency response and disaster mitigation, and urban management. In emerging applications sectors, BDS has served epidemic prevention and control, telemedicine, caring for seniors, promoting the realization of intelligent health services that serve everyone, and accelerating intelligence and modernization in related fields.
Mass market applications. BDS has been widely used in mass market applications, such as mobile phones and wearable devices. In the first half of 2022, among all types of smartphones that applied for network access in China, 128 supported the BDS-based positioning function. More than 130 million smartphones supporting BDS services were shipped, accounting for more than 98% of the country’s total volume. The BDS positioning service is used more than 100 billion times daily on average for a platform that supports mobile map navigation. In particular, mobile phones have been fitted with high-precision positioning services. Lane-level navigation has been implemented in eight cities in China, including Shenzhen, Chongqing and Tianjin. The first mobile phone in the world that supports BDS-3 regional short message communication services has been officially released, enabling users to send short messages through BDS.
BDS international applications. BDS has been applied in more than half the countries and regions in the world, with more diversified application modes and application fields.
BDS products, technologies and services have been recognized by more international users:
In Mozambique, BDS-based UAVs have greatly improved the efficiency of plant protection operations
In Lebanon, BDS-based high-precision technology has been successfully applied to the construction and measurement of the port of Beirut
In Burkina Faso, BDS supported surveying and mapping during the construction of hospitals to prevent and control local infectious diseases, such as COVID-19
In Saudi Arabia, BDS is widely used in fields such as surveying and the collection of geographic information, the construction of urban and municipal infrastructure, and the positioning of personnel or vehicles in deserts
In Asia, BDS-based high-precision positioning services are contributing to the monitoring of Sarez Lake Dam in Tajikistan, the completion of the China-Kyrgyzstan-Uzbekistan Highway, the China-Kazakhstan crude oil pipeline, and the routine operation of China-Europe Railway Express.
International Cooperation
Following the principles of openness, cooperation and resource sharing, BDS has been actively carrying out practical international cooperation and exchanges as well as facilitating the development of global satellite navigation.
Multilateral cooperation. BDS representatives continue to participate in international activities under the framework of the United Nations International Committee on GNSS and other multilateral forums, to advocate joint development of global satellite navigation by contributing Chinese wisdom and proposals. BDS has also participated in international academic conferences in the field of satellite navigation, such as the Institute of Navigation meetings, the Munich Satellite Navigation Summit, and the Multi-GNSS Asia Conference.
Bilateral cooperation. The Ninth Meeting of the China-Russia Project Committee on Major Strategic Cooperation in Satellite Navigation was successfully held in September 2022. Under the framework of the Committee, BDS and GLONASS have carried out continuous cooperation in such areas as compatibility and interoperability, system performance testing and assessment, and joint applications. China’s Satellite Navigation Office signed cooperation documents in the field of satellite navigation with partners from the United Arab Emirates and the Arab Civil Aviation Organization, to carry out extensive cooperation and continue to deepen cooperation with Pakistan, Iraq, Thailand, Argentina, South Africa and other countries.
International Standards. BDS is increasingly recognized by international organizations such as the International Maritime Organization (IMO), the International Civil Aviation Organization (ICAO), Cospas-Sarsat, IEC, 3GPP and RTCM. In November 2022, the BDS Message Service System (BDMSS) was ratified by the Global Maritime Distress and Safety System (GMDSS), making BDMSS the third GMDSS satellite communication system recognized by the IMO. The Declaration of Intent for Cospas-Sarsat MEOSAR Cooperation was signed between the cooperating agencies (from Canada, France, Russia, and the United States) of the International Cospas-Sarsat Program and the Maritime Safety Administration of China, meaning China formally becomes the provider of the Cospas-Sarsat space segment.
The Future
In the future, BDS will launch back-up satellites to ensure better performance by upgrading the constellation’s availability. While maintaining stable operation, BDS will speed up in combination with new technologies such as 5G, artificial intelligence and Big Data to build a more ubiquitous, more integrated, and more intelligent national comprehensive PNT system by 2035. BDS will continuously adhere to the development concept that “BDS is developed by China, dedicated to the world and aiming to be world class,” promote system development and make contributions to social development and construction of the community with a shared future for mankind.
For analogous updates on the other three GNSS constellations, please see: