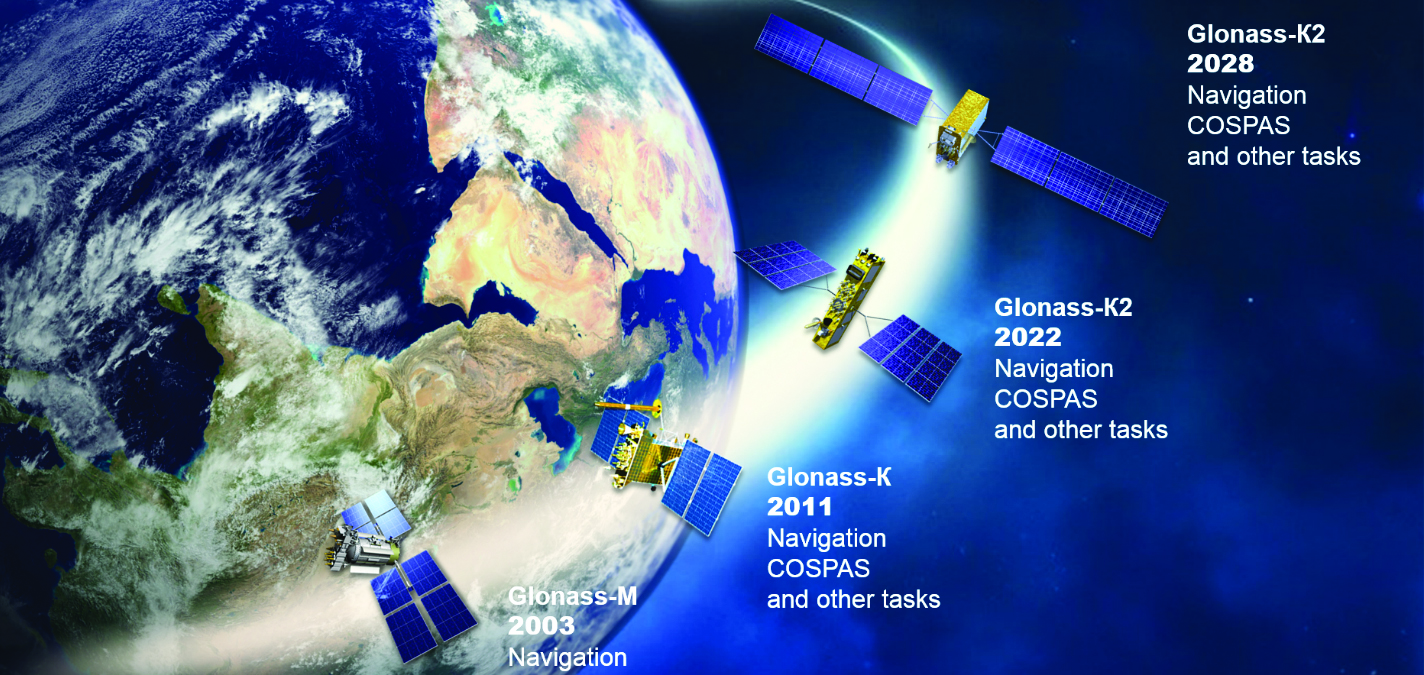
On Nov. 29, 2022, Russia launched the 51st Glonass-M satellite, completing a 20-year history that began on Dec. 10, 2003, with the launch of the first one. These satellites have been providing navigation signals in two frequency bands, L1OF and L2OF, to civil users since 2011.The average orbit lifetime for this type of satellite is more than 10 years, and 13 Glonass-M satellites operate beyond their guaranteed lifetime. The last set of seven satellites has been broadcasting the first CDMA civil signal, L3OC, by means of an additional antenna and onboard transmitter.
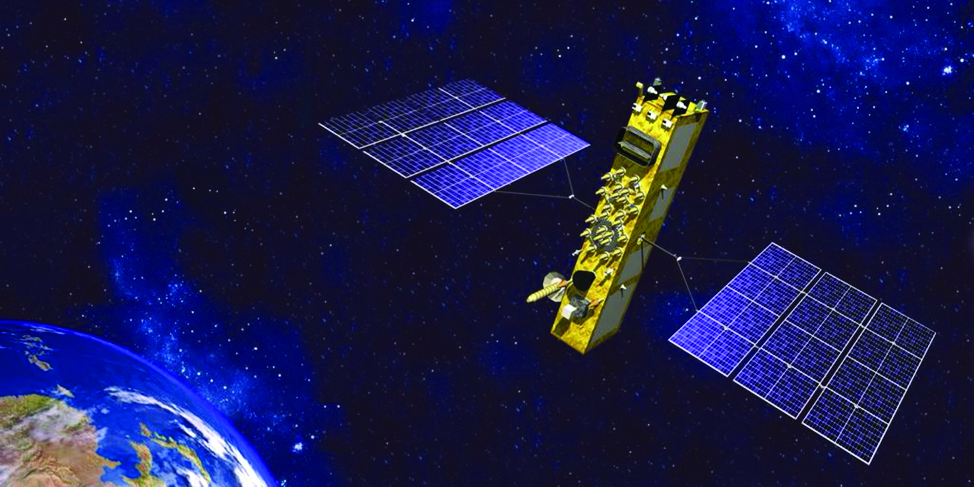
Starting this year, the constellation will be renewed by Glonass-K and Glonass-K2 satellites, which provide CDMA signals to users. Furthermore, four Glonass-K satellites will be supplemented with additional Glonass-K satellites and the first Glonass-K2 satellite. The K2 satellite has passed all ground tests and is ready to be transported to the launch site (Figure 1). Table 1 lists the technical characteristics of GLONASS satellites.
Figure 1. Artist’s rendition of the Glonass-K2 satellite in orbit.Table 1. The evolutions of GLONASS satellites.
The distinguishing feature of this satellite’s design is its two antenna arrays — one for CDMA signals with phase centers on the geometrical axis of the satellite, and the second for FDMA signals with phase centers shifted by 0.9 m relative to that axis.
The optical reflector panel center is also located on the satellite’s geometrical axis and passed through its mass center. It seems to be a very interesting scientific task to estimate the satellite flight model parameters by International Laser Ranging Service stations with the objective to improve the accuracy of the navigation signals for both antenna arrays.
Future GLONASS satellites will have a single antenna array for CDMA and FDMA signals (see Figure 2).
Figure 2. The evaluations of GLONASS satellites.
For analogous updates on the other three GNSS constellations, please see:
How the atom went from data’s worst enemy to its best friend
By David Chandler, product marketing manager, Frequency and Timing Systems business unit, Microchip Technology
GNSS constellations are precise timing systems. (Image: Microchip Technology)
Timing from atomic clocks is now an integral part of data-center operations. The atomic clock time transmitted via Global Position System (GPS) and other Global Navigation Satellite System (GNSS) networks is synchronizing servers across the globe, and atomic clocks are deployed in individual data centers to preserve synchronization when the transmitted time is not available.
This high level of synchronization is vital to ensure the zettabytes of data collected around the globe every year can be meaningfully stored and used in many applications, whether due to system requirements or to ensure regulatory compliance. The quantum nature of an atom enables the precision time and is a critical part of ensuring that more data at faster speeds will be processed in the future — ironic, as just a few years ago the quantum nature of the atom was seen as the ultimate death of this increase in data processing and speed.
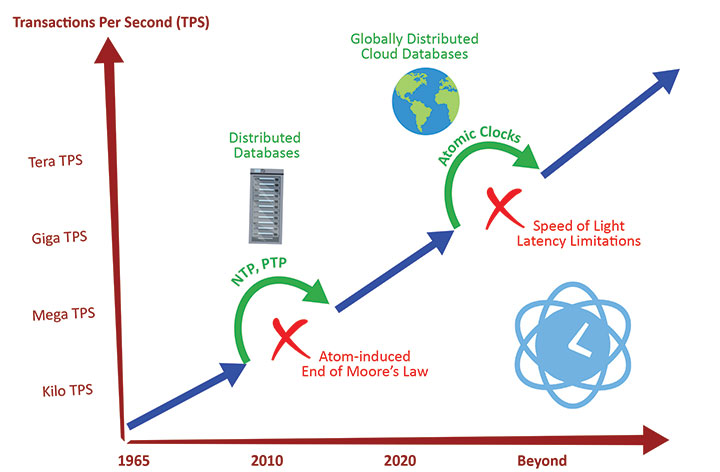
In 1965, Gordon Moore predicted the transistor count on an integrated circuit would double every year. This was eventually revised to doubling every two years. Along with this increase in transistor density came an important increase in speed as well as decreases in cost and power consumption.
It may have been hard in 1965 to imagine there would be any real-world need to have a semiconductor with 50 billion transistors on it in 2021, but as semiconductor technologies kept up with the law, so did application demands. Cell phones, financial trading and DNA mapping are all applications that rely heavily on the number of operations per second a microprocessor can execute, which is closely tied to the transistor count on a chip.
Satirical image of an engineer trying to keep up with Moore’s Law. (Image: Microchip Technology)
The Demise of Moore’s Law
Unfortunately, Moore’s Law is rapidly coming to an end due to a limit imposed by physics. With wafer fabrication now in the sub-10-nm technology nodes, the transistor sizes are only about 10 to 50 times that of a silicon atom. At this scale, the size and quantum properties of atoms and free electrons significantly prohibit further size reduction. In essence, you could think of the atom as the ultimate court that struck down the law.
But while Moore’s Law will come to an end, the thirst for increased processing power will continue to grow. With the advent of the internet of things (IoT), streaming services, social media posts and autonomous self-driving cars, the amount of data generated every day continues to increase exponentially.
In 2021, every day an estimated 2.5 exabytes (2,882,303,761,517,120,000 bytes) was generated. Exabyte databases managing more than 100,000 transactions per second (a transaction consists of multiple operations) are currently in use, and the size of the databases and the transactions per second will continue to grow for the foreseeable future.
Synchronizing the Machines
This explosive growth in the volume of data — coupled with the speed at which the data must be written, read, copied, analyzed, manipulated and backed up — required data-center architects to find a way around the end of Moore’s Law. The architects employed horizontal scaling in a data center with distributed databases, where instead of an entire database residing on one server, the database is distributed over multiple servers in a cluster.
In this configuration, the cluster essentially functions as one giant machine, hence the size and speed of the system now becomes limited by the physical size of a data center rather than by the size of an atom. (Take that, atom!)
Software engineers now make careers writing code that enables horizontal scaling. For all the software to work, however, all the machines must be synchronized. Otherwise it violates a concept called causality.
What is causality? It is easiest to explain through an example. Suppose you have two cameras to record images for a 100-meter dash, each with its own internal clock. The first camera is at the starting blocks. The second camera is at the finish line. Both sensors are continually firing and timestamping each image with the time from their respective clocks.
Clock uncertainty causes issues with causality. In this case, a race officially finished before it started. (Image: Microchip Technology)
To determine the official time of the winning sprinter in the race, the first camera’s images are reviewed for the point in time when the first runner left the block and this time-stamp is subtracted from the time-stamp on the last camera’s image for that runner crossing the finish line.
For this to work, both cameras must be synchronized to an acceptable level of uncertainty. If the synchronization of the clocks is only ±0.05 seconds, you would be unable to determine if someone who was recorded as running 9.6 seconds actually broke the world record of 9.58 seconds. What if they were only synchronized to ±5 seconds from the stadium clock?
Imagine this scenario: Observed from the main stadium clock, a race starts at exactly 12:00:00:00 p.m. The first runner crosses the finish line at 12:00:09:60 p.m. From the perspective of the main stadium clock, the official race time was 9.6 seconds.
But what if the first camera’s clock was exactly 5 seconds fast and the second camera’s clock was exactly 5 seconds slow? The race would officially start at 12:00:05:00 p.m and finish at 12:00:04:60 p.m. The race would officially finish 0.4 seconds before it started, the world record would be shattered, the laws of physics would be broken, and the current record holder would most likely be wrongfully dropped by all his sponsors.
Applying Causality to a Database
The same principle of causality is important in a database. Transactional record updates must appear in the database in the sequential order in which they occurred. If you count on the direct deposit of your paycheck arriving prior to having a direct withdrawal to pay your monthly mortgage, and the bank’s database did not record these in the correct sequence, you will be charged an overdraft fee. On one machine, causality errors are easy to prevent, but on multiple servers, each with its own internal clock, the servers must be synchronized and timestamp every transaction.
To achieve this, one server must act as a reference clock, much like the stadium clock, and it must distribute time to each server in a way that minimizes the time error of each server clock. The uncertainty of each timestamp (±5 seconds in the race) forms a time envelope that is twice the uncertainty of the clock (10 seconds for the race). For a distributed database, the number of nonoverlapping time-envelopes that can fit into a second should be at least on the order of the number of transactions per second expected for the system.
Probability, criticality of causality, and cost of implementation will ultimately all play a role in the final solution, but this relationship is a good starting point. A system with time-stamp uncertainties of ±1 millisecond would have time-envelopes of 2 milliseconds, and a maximum of 500 non-overlapping time-envelopes would fit in one second. This system could support approximately 500 transactions per second.
Where NTP and PTP Fall Short
Time-over-Ethernet technologies known as Network Time Protocol (NTP) and Precision Time Protocol (PTP) are used to synchronize all the servers in a distributed database in a data center. These protocols can ensure a local area network can distribute time with sub-millisecond (NTP) or sub-microsecond (PTP) uncertainties, enabling thousands (NTP) or millions (PTP) of transactions per second.
Unfortunately, even with these solutions that enabled a detour around the atom-imposed demise of Moore’s Law, physics has thrown another roadblock in the path of distributed databases in the form of the speed of light.
Imagine a well-synchronized distributed database operating with PTP in San Jose, California, happily executing 100,000 transactions per second with no causality issues. One of the database architects is sitting in his office in New York and his boss asks him to update a large series of records.
The architect wants to be able to exploit his new database to its full extent and show off the system capabilities. He plans on executing 100,000 transactions per second.
To update records per the request, he creates a simple transaction that adds the value of one record to a second record only if the value of the first record is greater than the second record. To accomplish this, he must issue a read to both records. His local machine in New York will then compare the values, then send a write command to the second record when needed.
After completing this, he then wants to execute the next transaction that compares a third value to the new sum. If the new sum is greater than the third record, then the third record is replaced with the sum. He wants to repeat this for 6 million records. Because the database is capable of 100,000 transactions per second, he thinks it will be done in roughly a minute. He tells his boss he will have the records updated in five minutes, then leaves to get a cup of coffee.
While drinking his coffee, he reads a story about how the new 100-meter dash record is negative 0.4 seconds which defies the laws of physics, and that the previous record holder is suing the stadium officials because he has lost all his endorsement money. The architect laughs to himself and thinks that the stadium should have hired him as the synchronization expert.
He comes back to his desk five minutes later and is dismayed to see that his database update has completed fewer than 1,500 transactions. He sadly realizes his mistake and prepares his résumé to send it over to the stadium, where he hopes his PTP deployment won’t have the same problem.
What went wrong? The speed of light limits the theoretical fastest possible transmission of data between New York and San Jose to 13.7 milliseconds.
The speed of light imposes a theoretical limit to the speed at which data can be transferred between two points. (Image: Microchip Technology)
The Distance Problem
Unfortunately, real world transactions are even slower. Even with a dedicated fiber-optic link between the two locations, the refractive index of the fiber, the real-world path of the fiber and other system issues make this transit time even slower. So just one transmission from New York will take 40 to 50 milliseconds to arrive in San Jose.
However, in this transaction there are four unique operations. There are two read operations, which could happen in parallel, which then have to be sent back to New York. The round trip takes 80 to 100 milliseconds. Then, once both values are compared, a write operation is issued and a write acknowledgement must be sent back indicating the write operation completed before the next transaction can start.
Suddenly, it doesn’t matter that the database can perform 100,000 transaction per second, because the distance is limiting the system to 5 transactions per second. To complete the 6 million transactions, this system would take 13 days, more than enough time for several more cups of coffee and to update a résumé. This delay is referred to as communications latency.
Circumventing Latency
But just like with Moore’s Law, database architects figured out how to circumvent latency. Database replications are created near the users, so they can work with the data without having to send signals across the country.
Periodically, the replications are compared and reconciled to ensure consistency. During the reconciliation process, the transaction time-stamps are used to determine the actual sequence of transactions, and records are sometimes rolled back when there is an irreconcilable difference such as when the transaction time-envelopes overlap. Reducing clock uncertainty reduces the number of irreconcilable differences in replicated instances, as more time-envelopes reduce the probability of overlaps. This results in higher efficiencies and lower probabilities of data corruptions.
But now the timestamping has to be accurate not only within each data center, but also between the data centers, which can be separated by thousands of miles and connected via the cloud. This is a much more difficult task, as it requires an external reference with very low uncertainly that is readily available in both locations.
Down to the Atomic Level
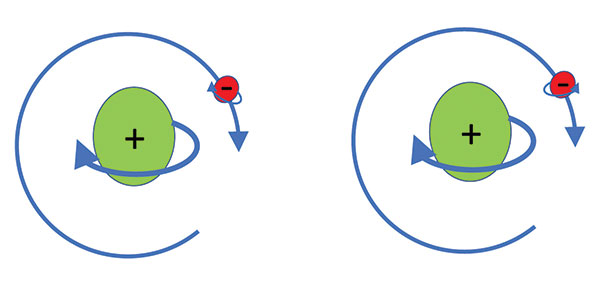
Enter the previous foe of the database architect, the atom. While the atom was busy repealing Moore’s Law, its subatomic particles were busy spinning. The neutrons and protons in the nucleus were rotating, while at the same time the electrons were busy orbiting about the nucleus, while also spinning on their own axes. This is analogous to Earth orbiting around the sun while simultaneously spinning on its axis.
The electrons can spin around their axes clockwise or counterclockwise. Considering there are roughly 7 octillion (7 with 27 zeros after it) atoms in a human, with all the subatomic particles spinning in our bodies, it is amazing we aren’t permanently dizzy. (Note: The subatomic particles aren’t really busy spinning and orbiting, they are really busy giving us probability wave functions and magnetic interactions that would give us results similar to what would happen if they were spinning and orbiting. But if the thought of all the spinning makes you dizzy, trying to comprehend the reality of quantum mechanics will make you positively nauseous.)
Conceptual atoms with nucleus and valence electron with nuclear spin, electron spin and orbital spin. (Image: Microchip Technology)
When microwave radiation at a very specific precise frequency is absorbed by an electron, the direction of spin about the electron axis can be changed. If this happened to Earth, the Sun would suddenly set in the east and rise in the west!
Atomic clocks are machines designed to detect the state of the electron spin, and then change that direction through microwave radiation. The frequency varies depending on the element, the isotope, and the excitation state of the electrons.
Once the machine determines the frequency, known as the hyperfine transition frequency, the period can be determined as the inverse of the frequency, and the number of periods can be counted to determine the elapsed time. The international definition of the second is 9,192,631,770 periods of the radiation required to induce the hyperfine transition of an electron in the outer orbital shell of a cesium atom.
Atomic clocks are the most stable commercially available clocks in the world. An atomic clock the size of a deck of cards called the chip-scale atomic clock (CSAC) will drift 1 millionth of a second in 24 hours, whereas an atomic clock the size of a refrigerator called a hydrogen maser will only drift 10 trillionths of a second in 24 hours. (Coincidentally, 10 trillionths is also about the ratio of the radius of the hydrogen atom to the height of the sprinters in the 100-meter dash and of the now-unemployed data-center architect in New York.)
With the accuracy provided by these atomic clocks, approximately 500,000 to ~50 billion non-overlapping time-envelopes can be provided for a distributed database running in data centers in Tokyo, London, New York, Timbuktu or anywhere else in the world.
The unit second is defined by counting 9,192,631,770 cycles of the cesium hyperfine transmission radiation frequency. (Image: Microchip Technology)
Time for Distribution
How does time get to all the data centers from these atomic clocks? Universal Coordinated Time (UTC) is a global time distributed by satellites, fiber optic networks, and even the internet. UTC itself is derived from a collection of high precision atomic clocks located in national laboratories and timing stations around the world. Contributors to UTC receive a report that provides the UTC time from these clocks and their individual offset from calculated UTC. The labs and other facilities then transmit the time to the world.
The UTC report is published monthly and tells the national labs their miniscule timing offset from UTC during the previous month. Technically, we don’t know precisely what time it was up until a month after the fact. And to make things worse, extra seconds are periodically added to UTC, called leap seconds, which are inserted due to variations in the Earth’s rotation and our relative position to observable stars. While this aligns Earth to the universe, it causes havoc in data centers and 100-meter dashes.
The hyperfine transition frequency produced in a hydrogen maser, 1.420405751 GHz, will cause spin reversal in an electron. (Image: Microchip Technology)
Enter GNSS
Two common methods used by data centers to acquire UTC are via the internet using publicly available NTP time servers and via satellite using GPS or other GNSS networks. While timing through public NTP timeservers over the internet was common during early deployment of distributed databases, inherent performance, traceability and security issues have created the push to move away from this solution.
Even though GPS and other GNSS are typically thought of as positioning and navigation systems, they really are precision timing systems. Position and time at a receiver are determined by the transit time of signals traveling at the speed of light from multiple satellites to the receiver. Ironically, this is another case of a physics principle causing a problem — in this case the speed of light instead of the atom — but also contributing to the solution.
The satellites have their own onboard atomic clocks, which are synchronized to UTC that was transmitted to the satellites from ground stations. Acquiring UTC with this method can provide time uncertainties in the 5-nanosecond range, enabling 100 million time-envelopes per second.
This method is far more reliable and accurate than public NTP servers, and while these signals can be interrupted by such events as solar storms or intentional signal jamming, backup clocks that have been synchronized to the satellite signals when present can be placed in each individual data center to provide the desired uncertainty levels during these interruptions.
The evolution of database transaction rates and the enabling and disabling technologies. (Image: Microchip Technology)
Next Up: Jumping Electrons
As our quest to acquire, store and transact data in the future continues to grow, novel atomic-clock technologies and time transmission systems with lower uncertainties will be needed. Currently, national timing labs are developing atomic clocks that work on the optical transitions that occur when an electron jumps orbital shells. These offer frequency stabilities to a quintillionth of a Hertz and will eventually be used to redefine the unit second.
Signal transmission through dedicated fiber-optic links or airborne lasers are already yielding improved transmission accuracy. With these continued innovations data, the atom and light will continue their complex love-hate relationship to enable ever larger quantities of data processed at ever increasing rates without consistency issues or causality casualties.
Achieving PNT resilience for critical infrastructure applications
GNSS are magic. They are. One dictionary defines magic as “a power that allows people (such as witches and wizards) to do impossible things by saying special words or performing special actions.” By this definition, we have all become witches and wizards, doing what previous generations would have deemed impossible.
This magic, however, can be affected by external forces that render it useless at best and, at worst, dangerous. Warnings about GNSS positioning, navigation and timing (PNT) service vulnerabilities have been raised for 25+ years. Numerous organizations have warned of the potential safety, security and economic impacts of GNSS interference. Still, like modern-day Cassandras, their warnings have been ignored, and sole use of PNT services that rely on space-based signals continues to expand.
“Magic services” are addictive and cannot be ignored. Yet, it is well past the time to merely admire the problem of GNSS interference — benefitting from magical GNSS services while ignoring existing and emerging threats and challenges. It is time to draw a line and implement resilient, complementary PNT solutions to support all critical infrastructure sectors and applications in the event of any GNSS disruption, due to jamming or spoofing or systemic causes. “Magic” is magical when it works. When it does not, first and foremost, it should “do no harm.”
Threats, Challenges and Needs
Presidential Policy Directive (PPD) 21, Critical Infrastructure Security and Resilience,issued in 2013, defines resilience as “the ability to prepare for and adapt to changing conditions and withstand and recover rapidly from disruptions.” It also notes that “resilience includes the ability to withstand and recover from deliberate attacks, accidents, or naturally occurring threats or incidents.”
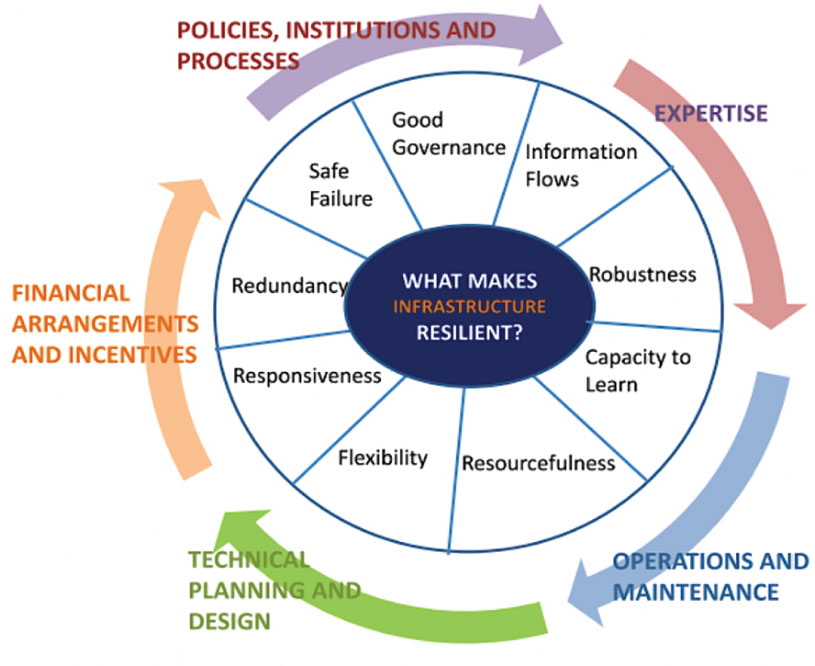
In 2016, the UK Department of International Development noted that “Resilience covers both ‘physical and societal systems” through four “R” principles: robustness, redundancy, resourcefulness and rapidity (see Figure 1).
Figure 1. Infrastructure resilience properties. (Image: UK Department of International Development)
More recently, Andy Proctor (RethinkPNT) pointed out that “A resilient PNT system protects its critical capabilities (assets) from harm by using protective resilience techniques to passively resist or actively detect threats, respond to them, and recover from the harm they cause.”
Policies, processes, financial arrangements and incentives are also crucial to achieving resilience — and that has been, and remains, the problem. Lacking the emergence of strong leadership from our institutions, the ability to achieve actual resilience will continue to falter and admiration of the problem will continue.
Developing a resilient PNT system is always a balance of technical complexity and non-technical aspects, for example, costs. The key consideration for users must be the required performance metrics they need for their use-case(s) to ensure their resilience — including accuracy, availability, integrity, continuity and coverage. The one least understood and many times omitted is integrity — the level of trust a user/use-case needs to safely and securely use the PNT services. The ability to trust PNT services must always be a consideration for critical infrastructure applications.
Unfortunately, many users of critical infrastructure PNT do not know some of the PNT metrics they need to ensure safety and security. More troubling, there is no guidance as to what constitutes “significant economic impact” (see PPD 21) or acceptable economic loss — and over what period or range of use cases. This understanding will require analysis of their design, development and operational experiences, and working with PNT systems engineers to first derive these metrics and then drive the continuous improvements (see Figure 2) needed to achieve and retain truly complementary PNT capabilities. Without clear metrics and guidance, one cannot claim that any solution will meet any “required level of resilience.”
Figure 2. Resilient PNT lifecycle.
Supporting PNT Users
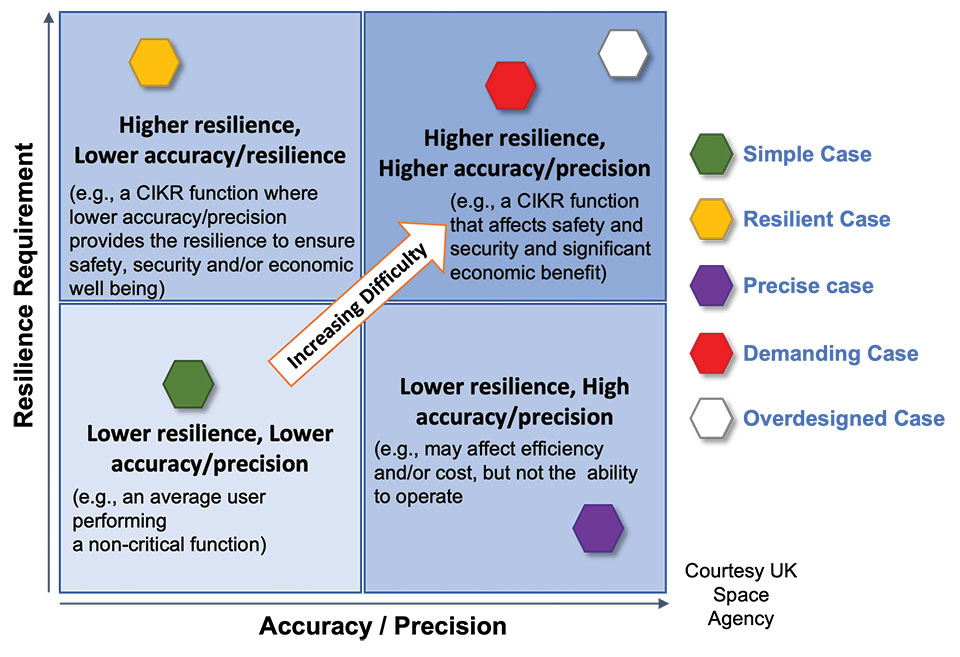
As with all systems engineering (SE) activities, PNT system resilience begins with identifying and documenting user needs based on their specific user stories/use cases. Figure 3 depicts different aspects of resilience that can be sought, depending on the unique use-case “demands.”
Figure 3. Resilience aspects. (Photo: UK Space Agency)
While the resilience needs of different use cases will differ, for any specific use case, a given “PNT solution” will either achieve the required/threshold level of resilience (based on the operational environment) or it will not. Some use cases may also require fail-safe or fail-soft capability and the ability to recover to known, trusted and usable states. Shouldn’t many, if not all critical sector use cases require this?
Equally important is the identification of risks and threats, as they are critical to understanding the challenges that the system must face while continuing to provide the necessary P, N and/or T service performance. It is also key to understand and document the system architecture and environment in which it must perform. With knowledge of a user’s needs, the threats, hazards and challenges they face, and the system architecture, the SE process can develop an understanding of the “gaps” that exist and of the levels of risk they impose on a critical infrastructure system’s functional, physical and operational performance. Understanding this, essential use-appropriate mitigations can be identified, or if need be, developed, and a resilient, solution-agnostic PNT requirement document created.
The Way Forward
The Critical Infrastructure Resilience Institute (CIRI), a U.S. Department of Homeland Security Center of Excellence, notes that “critical infrastructure systems are facing a myriad of challenges. Solutions must address the cyber, physical and human dimensions.” They keyed into four areas where critical infrastructure resilience activities should be directed: building the business case, information policy and regulation, developing new tools and technologies, fostering and educating the workforce.
These include the recognition that “policy and regulation have a powerful impact on market forces.” While the fact that “most U.S. infrastructure is owned and operated by the private sector” is a challenge, it should not be an excuse.
We must start immediately to re-establish strong SE practices, policies, and principles to help critical users understand their needs and determine the metrics required to ensure safety and “preclude significant economic impact.” Only then can we understand from a national perspective, the needed safety and security metrics and what constitutes significant economic impact, and then establish categories of solution-agnostic requirements. Lacking these clear resilience targets, detailed planning, and required resource commitments, the growing threats of PNT vulnerability will continue only to be admired, rather than be mitigated. Hope is not a strategy, but this systems engineer hopes that it does not take a truly catastrophic event to finally prompt much needed and long overdue actions.
Mitch Narins is the principal consultant/owner of Strategic Synergies LLC, a consultancy he formed following more than 40 years of U.S. government service. He is a Fellow of the Royal Institute of Navigation, a aenior member of the Institute of Electrical and Electronic Engineers, a member of the Institute of Navigation and head of its Washington, D.C., section, and a member of RTCA, RTCM, IEEE and SAE Standards Committees.
From its humble beginnings in the 1970s to its expanded use in the present day, GPS technology has been vital for nearly every industry from defense and aviation to farming and construction. GPS devices are designed to receive faint GPS signals transmitted from satellites about 12,000 miles away. Acknowledging this reality, regulators have historically maintained for GPS, which relies on such faint radio signals and sensitive equipment, an appropriately quiet spectrum neighborhood—populated by similar users.
With the NASEM report’s confirmation of harmful interference, the deficiencies of the FCC’s April 2020 decision are even more striking
Although these GPS signals and equipment have benefitted from decades of optimization, it is impractical to place highly sensitive GPS receivers designed to capture faint signals from remote transmission facilities immediately next to high-power communications equipment. Unlike those from communications systems, GPS signals are below the thermal noise floor when they are received. As a result, increases in that noise floor often decrease the availability of GPS services, which in turn places at risk high-consequence and safety-of-life services that rely on GPS.
Alex Damato
Why does this matter? In April 2020, the FCC approved a plan to deploy a terrestrial network in spectrum adjacent to the frequency bands used by GPS — operating communications signals that would be around two billion times more powerful than GPS signals at the same location.
This past September, the National Academies of Sciences, Engineering, and Medicine (NASEM) released a report detailing the harmful effects of a terrestrial communications network that would operate in a frequency band close to that of GPS.
Expert concern within 14 federal agencies and departments, a broad coalition in Congress, and the GPS industry resulted in a congressional mandate that NASEM conduct an independent technical review of potential interference to GPS. After a thorough review of the materials, NASEM concluded that the proposed terrestrial network would result in harmful interference to a substantial number of GPS receivers.
In particular, the report noted that high precision GPS devices, which are used in the most economically significant GPS applications, are the most vulnerable receiver class and likely to be affected by interference. The potential for any interference with GPS, especially with devices used by the Department of Defense, poses a threat to national security, the economy, and our daily lives.
With the NASEM report’s confirmation of harmful interference, the deficiencies of the FCC’s April 2020 decision are even more striking: potentially millions of farmers, pilots, construction companies, and first responders may be required to repair or replace GPS equipment at their own cost. Although the FCC assumed that this equipment could be repaired through upgrades or filters, some devices cannot be filtered without significant financial and performance costs, and some devices simply cannot be filtered at all.
GPS is estimated to provide up to $300 billion annually in benefits to the economy. Any disruption in GPS accuracy and usage would have detrimental effects on productivity and economic growth. Moreover, the year before the FCC’s flawed decision, another key report revealed that the loss of GPS service would have an average impact of $1 billion per-day on the nation.
The GPS Innovation Alliance will continue to work with all federal and industry stakeholders to maintain open channels of communication to connect, listen, and learn from all those involved in the discussion. As technological innovation continues, these debates on harmful interference are not going away, and GPSIA is looking forward to engaging further.
Guidance and precision control, the base elements of modern machine control for construction, have continued to evolve since broad productization began in the mid-1990s. However, the value proposition has become even sweeter since, with value being realized beyond the return on investment (ROI) of the general contractors and the total project price tag for the clients. While the majority of equipment globally is still non-digital, new levels of simplicity and affordability are helping to fill that gap.
The roots of machine control stretch back a century. The Historical Construction Equipment Association (HCEA) posits that the A.W. French & Co. “utility grader” of the 1920s, a crawler-mounted unit that used stringline control, may be the very first example — and this before electronics and computing. However, it was the advent of real-time kinematics (RTK) for GPS in the mid-1990s that brought machine control as we know it to the construction site, and coincidentally to precision agriculture.
Initially, the focus was on guidance. Then it moved to precision control, such as blade control, and later propagated to more classes of motorized equipment, improved with further sensor integration.
The impact on construction and agriculture has been undeniable: productivity gains, less rework, more efficient handling of materials, shorter timelines, site safety improvements, and more. These benefits are as obvious to clients and operators as they were in the early days of adoption, gains from nearly three decades of innovation.
What form have these growing benefits taken, and who is realizing them? We sought insights from industry experts to find out.
Grading and Excavation
Automation is not just about speed; it is also about better control of the load and stress on the equipment and moving just the right amount of materials so as not to place a burden on it. (Photo: CHCNAV)
These two activities, as each of our interviewed experts attest, represent the lion’s share of realized productivity gains.
While not the complete picture of overall value, the sheer volume of equipment that has been, or could be, automated speaks, well, volumes. “Apart from the skid steer systems, there are more excavators manufactured than all the other equipment types combined,” said Daniel Sass, product manager of machine control at Hemisphere GNSS. “Excavators are the workhorse. And people use them differently, and they use other pieces of equipment to complement excavators somewhat differently. Certainly, the bulk of our sales is excavators, and in fact a key part of our value proposition is focused on compact machines, but also all the way up to mining shovels. Certainly, by volume it is excavators and compact excavators.”
Numbers help tell the story. “In the United States, at least in a three-year period from 2019 to 2022, about 253,000 excavators were sold, for which I have pretty reliable data, but only 61,000 dozers and only 7,000 scrapers,” Sass said. “That’s North America, where we also use a lot of dozers and scrapers. If you go to Europe, where they use excavators for many other tasks, the proportional impact might be higher.”
Operators can easily gauge the ROI of going digital for individual pieces of equipment such as excavators, but part of the incentive could be that general contractors are requiring subcontractors to be equipped and ready to fit into a more complete digital site. “Some definitely require it,” said Randy Noland, vice president of global sales at Hemisphere GNSS. “A lot of … larger sites. I wouldn’t say everybody mandates it yet, but that it is growing.”
“Operator assistance is not only helping someone cut to grade faster, but is also the best way to cut to grade,” said Cameron Clark, earthmoving industry director, Trimble Civil Construction. “How do you move the material? That directly ties into productivity by only moving the material you need to move, which also equates to less fuel because you can do it faster.” With operator assistance, Clark said, it is not uncommon to see productivity gains of 30% to 40%, even with inexperienced operators. And with automatics, this could exceed 75%, depending on the work done.
There are substantial gains to be made in operator assistance for less complex heavy equipment, such as compactors. “Often a contactor will put a less experienced operator in the compactor,” Clark said. “In manual days, to overcome the potential of under-compaction and missing spots, they’d create quite a big overlap, maybe up to 40% of overlap between paths. By adding steering control, we can automate the compactor to where it needs to be — to stay on line every day, all day. And you can reduce the overlap to 10% or 15%; having to compact a smaller area means that you’re quicker, say 30% quicker.”
“Grade control gains can be 30% to 50%,” said Magnus Thibblin, president, machine control division, Hexagon Geosystems. “Depending on the machine and the job application, and how experienced the crew is, it can be similar for excavators.” Thibblin was an end user from the early days of machine control. He saw its potential and how it might work better. Its benefits came not just from automating elements of the equipment, he said, but from implementing a more complete digital workflow.
“How much are you working with the digital design from the start?” Thibblin said. “I’m one of those who believes you should have 3D from the start; for any kind of layer that the machines can build to. Incidentally, in North America, working to models is implemented for a lot of graders and dozers. In Europe, there is a large excavating market, but it’s the same foundation. If you work from the design, you will have savings in fuel, time, efficiency, safety, etc. Depending on all of these things, the total value proposition may be 30% to 70%.”
Wenming Sun, vice general manager for digital construction, CHCNAV, reiterates these points. “Currently, our machine control solutions are mainly installed on earthmoving machines, including bulldozers, excavators and motor graders,” Sun said. “The greatest value of these solutions is to improve construction efficiency, shorten construction time, reduce fuel consumption and mechanical wear while ensuring construction quality.”
CHCNAV is a relatively new player in the construction machine control market, launching initially in Europe and Asia. The company has been developing automation and steering systems for equipment that can yield the highest gains for their customers. “For example, our 3D TG63 automatic control system for motor graders can double efficiency compared to manual operation of machines and reduce time by 50% for the same workload,” Sun said.
Getting to the designed grade, or trench line, of earthworks geometry faster is a huge benefit, while reducing or removing finishing steps is a bonus. “Now we’re seeing that with excavators that have automatics, the finishing we can get out of an excavator is amazing,” Clark said. “You used to get dozers cleaning up after excavators. Now, with the performance you can get with an automatic excavator, you often don’t need to run the dozer — the excavator can get it done the first time.”
However, dozers are used for many other tasks. Clark noted that about 95% of blade-control systems for dozers sold have automatics. He said grade control brings tremendous productivity gains, but that excavation is right up there as well. “When you look at the number of machines out there, it’s in a different league,” Clark added. “In 2021, for example, globally about 370,000 crawler excavators and 325,000 mini excavators were sold.”
Lateral Benefits
GNSS has revolutionized automation for many classes of heavy equipment. However, for certain high precision work, particularly finished elevations, site levels and totals stations are essential. (Photo: Hexagon)
For the general contractor, ROI is a key measure. This can be reasonably easy to gauge, as this ROI calculator shows: intelligent-construction.com/roi-calculator/. However, what matters is not just the upfront time and cost for grading and excavating, but also avoiding lateral time and costs. “If you can do jobs faster and more accurately, it lends itself to less rework,” Clark said. “You do it right the first time, which again goes into less fuel, and then also less material. For example, let’s say your excavator is digging down to a trench and the operator digs too deep, which happens often. That material dug out of the trench potentially needs to be carted away. So, extra fuel and trucks are needed to take the material away. They’ve got to put high quality material back in, so that means they actually have to cart more material back to put in the trench, and you have to spread the material.
Again, it’s a flow-on effect — a chain reaction. When you look at sustainability, what we do has direct and indirect effects — it’s 1 gallon of fuel you don’t use that saves about 22 pounds of carbon emissions.”
The green dividend goes beyond just what individuals and firms wish to see. Increasingly, infrastructure developers and owners may be subject to sustainability requirements. Depending on where the work is being done, sustainable development goals are being acted on. This includes not just the environmental goals, but also requirements for the digitalization of design and construction, and ultimately smarter and more sustainable infrastructure. Machine control in construction can deliver some of the most substantial benefits in meeting these goals.
Like overall value for the operators and clients, gauging the highest green dividend becomes a proposition of sheer volume. “On average, your dozer is going to burn much more fuel. However, we sell four times as many excavator solutions as we do for dozers,” said Miles Ware, vice president of marketing and global customer care, Hemisphere GNSS. “The excavator solution is critical for both an ROI and an environmental impact.” Among the most-sold excavators in the United States are the Kubota 4-ton, the John Deere 3.5-ton and 5-ton, and the Caterpillar 5-ton. “The smaller excavators are going to use a lot less fuel,” Ware added. “If we compare this to mid- and large-sized excavators and dozers, we might be getting close to a point of equilibrium, when it comes to environmental impact. Those that consume huge amounts of fuel move massive amounts of earth. However, the ability to have the larger units operate much more efficiently, complete jobs much faster, and get on site and off site quicker with fewer passes in fewer hours adds up to a green dividend. Then you take the smaller volumetric scale of so many excavators and the environmental benefit really starts to balance out. There are huge incentives for all these platforms, whether it be dozers or excavators, to have the technology in place.” Hemisphere announced at the Bauma Exhibition in October that it now has systems to support loaders and scrapers.
“One of the things that’s really intriguing to me about the loader solution is that it represents a crossover point between construction earthmoving and agriculture,” Ware said. “There’s a huge benefit for feedlots and agriculture-related operations, where they use machine-controlled loaders to avoid damaging base layers. We have a growing machine-control audience, and a substantially growing precision agriculture audience. It is just one example of how technologies are cross-pollinating in different verticals.”
The benefits of machine control are broadly recognized across the industry. “Improved construction efficiency and shorter construction time means that the machine operating time is shortened for the same workload,” Sun said. “According to our own calculation results, using for instance our system for motor graders, fuel consumption can be reduced by 35% to 50% under different working conditions. Thanks to the full real-time automation of its blade, the grader can achieve the expected finish accuracy in one or two passes, whereas an unequipped machine would require four to five passes. This effectively reduces fuel consumption and, as a result, minimizes the carbon footprint of construction projects.”
Automation means you can build to the model in less time and refine the movements of the equipment to move just the right amount of material — enough to improve productivity, but not so much as to put an undue strain on it. “Any time you have a piece of equipment that needs to be repaired or is out of service, it is disruptive to the project of course, but it can also have an environmental impact, and sustainability is something we all work toward,” Thibblin said.
Connectivity and Collaboration
Going to a fully digital site means working fully in 3D, from a digital model, and seeking to eliminate 2D plans sets. No more interpretation, no more estimation—the right amount of material is moved rapidly and reliably by multiple machines working in harmony. (Photo: Hemisphere GNSS)
Moving forward, there may be additional incremental gains in the productivity of individually automated equipment, yet this may be modest in contrast to the time since the introduction of machine control decades ago. For the next sea change in construction productivity, we should be looking beyond simply the machines. “Let’s take the holistic viewpoint,” Thibblin said. “You have everything from the machines that of course have either machine control or different levels of autonomy, everything from semi-autonomous to semi-automatic. Then you have the trucks, which can be connected also with the tracker devices, which enables optimal routing, enhanced safety, and coordinating material handling cycles.”
Total project and site coordination has been in the works for vertical construction for quite some time; we hear a lot about building information modeling. However, heavy civil is catching up. “We anticipate that the ongoing integration of digital construction solutions with internet of things technologies will bring more choice and functionality to customers,” Sun said.
Further, real-time collaborative software platforms are already in use. Many vendors for machine control have added live connectivity for such coordination.
“Our customers are using ConX,” Thibblin said, referring to Leica ConX, a cloud-based collaboration tool. “It is remotely connecting to the mission, which is support, service, file transfers, project updates.” While online collaborative tools have been around for years, current offerings have reached such a level of maturity that they have driven a boom in adoption for even smaller operations. Customers need to make sure that projects are working optimally, and continuously.
Another major difference from the early days of machine control is that the relative cost of outfitting equipment with automation components is far less. Therefore, it is more practical to automate nearly all equipment on a site, making a truly coordinated digital site possible. “It’s not just the larger businesses that are investing, it’s also the smaller businesses that understand and can calculate the ROI. It is also a difference in competency level: how complex and support-intensive the system was. Now, it’s much more integrated,” Thibblin said.
Today’s systems are tighter, work better, connect better with original equipment manufacturers (OEMs), and the learning curve not as steep. The machines have become smarter, yet easier to use and integrate. “You do not have to be a nuclear scientist to understand the systems,” Thibblin said. “The equipment and collaboration tools are now much simpler. Not simple to make, but we do that for you.”
It is a chain reaction: the equipment gets smarter yet simpler, and both characteristics drive more adoption. More of a site gets automated, enabling digital collaboration, and with that comes more efficiency, saving on time, costs, materials and fuel. The sum of the parts yields productivity gains, the site gets safer, and of course there is a green dividend as well. “It is not just the one thing that gets to this,” Thibblin said. “It is many parts.”
Clark reiterates, “The biggest driver and the biggest impact is when we can actually control the site, optimize how we coordinate groups of machines working together, and efficiently run the job site. That’s where you’re going to see the biggest benefit for sustainability and reducing the carbon footprint. You don’t just optimize productivity at the machine — it’s the coordination of the site and how the machines work together.”
What about the smaller firms and short-duration projects? Should the same level of full site integration happen for each job? Perhaps not. However, there are alternative ways to realize nearly all the benefits of automation without a full digital site. “There’s a lot of focus on short-duration jobs, not only for the typical small contractors, but also for large contractors,” Clark said. “Some large contractors actually target a decent portion of jobs for smaller duration, to balance out changes in market dynamics.” There is a lot of demand for small contractors with technology, and many small contractors have to automate just to stay in the game.
“People using grade control see all the benefits, and that affects their costs,” Clark said. “They can get jobs at a different price than someone who isn’t benefiting from grade control. We’re seeing this a lot in the adoption of our earthworks and grade-control products.”
A challenge to adoption by smaller firms used to be that with a small staff, they might not have the necessary office software, a surveyor, a design engineer, or a 3D modeler. While there is a cottage industry of drafters who do small 3D modeling contracts for that market, there are now more alternatives. “We’ve added features to our systems that enable these contractors, on these short duration jobs, to create designs without requiring office software,” Clark said. “Typically, without a 3D design, you are eyeballing, and you have to do grade checks. There are conventional systems that can include lasers and line tracers, but now that simple designs can be added to the machine-control systems without additional office steps, more operators will be able to use them on a greater number of small jobs.”
Multi-sensor integration has enabled more equipment on the site to be automated. Not long after the first GPS-guided machine control systems came along, more sensors were added, such as inertial measurement units (IMUs). Besides IMUs, the sensors in play can include GNSS receivers, lasers, lidar scanners, sonics, optics, cameras, displacement sensors, pressure sensors, thermal sensors, inclinometers, vehicle distance measurement instruments and telematics.
Beyond GPS, the wealth of additional GNSS satellites and signals has brought more robust and reliable solutions in mixed environments. Recently, a heavy equipment operator called to ask if there was “something wrong with GPS” that day. He reported having spotty fixes and wildly varying results. After some standard troubleshooting of his communications and correction sources, we determined he was using a legacy broadcast format, and his GNSS receiver, while fully multi-constellation enabled, was only using one constellation. Once a newer correction format was chosen — bam! — he was fixed instantly with results as good as he’d ever seen. Things are getting better on all tech fronts.
Coordination of a fully digital site often involves integrating as many operations as possible through a back-end site management software, connecting as much equipment as possible, and working from standard models. This can be a relatively simple proposition if a site is under a single solution. However, general contractors may not be in a position to use equipment from a single brand. They may have a diverse equipment portfolio and seek flexibility in being able to onboard subcontractors. Vendors have recognized this and offer different levels of interoperability. “In addition to high-performance and real-world site-smart software features, our systems play well with mixed fleets,” Noland said. “Meaning multi-brand GNSS systems, radios and various file formats. This is key for firms that have already made investments, as well as new users entering the market concerned about how compatible their equipment will be.”
“If you have a mixed fleet, you can easily grow it,” Ware said. “Or, you can interoperate with other contractors or entities. So, if there’s a brand X already working, and if a Hemisphere GradeMetrix contractor is added to that project, they can seamlessly come in and handle most of the files, go immediately to work, and further expand the use of the technology on that particular project.”
The Underserved Market
Machine control has evolved in the decades since initial productization from navigation and guiance to include precision control of blades, buckets and more, and the ability of even smaller equipment to work from 3D models. (Photo: Trimble)
If the construction industry is going to help meet growing global infrastructure needs, to fill the existing multi-trillion-dollar infrastructure gaps, then a lot more equipment needs to be automated.
“Let me just make a general comment that speaks to both productivity gains and a lower carbon footprint: as an industry, we can do much better,” Noland said. “Only about 15% to 20% of the equipment that could be outfitted for machine control has been, and the other 80% is up for grabs.” Noland credited other key players — such as Trimble, Topcon, and Leica — with providing excellent solutions for certain sectors of machine control, yet he sees an opportunity for Hemisphere to excel.
“The next wave is the underserved part of the market,” Noland said. “If we’re successful, then your climate impact is greater and your productivity gains higher.” He noted that in addition to systems for large equipment, a particular focus for Hemisphere has been providing a range of affordable solutions for smaller equipment. “We feel like we are tapping into that part of the market that has been underserved. It’s not necessarily new features from what everybody already has, as much as it is democratizing the technology to that underserved 80%.”
Autonomy and the Near Future
It is exciting to think about, but is the next sea change for construction machine control going to be full automation? Is that truly an inevitability? Or is the road to autonomy already paved with productivity gold?
“The autonomous machine, and the autonomous site; it is what we are doing to get there that continually boosts productivity,” Clark said. “As more operator assistance is added, the semi-autonomy that many systems already provide means that the operator can concentrate on more aspects of the operation; and this definitely enhances site safety.”
Autonomy might not necessarily reach every piece of equipment, and contractors may not want it for every task. With the prospects of anything like a fully autonomous site being on a sliding horizon, contractors and clients are not waiting around — they are already reaping the benefits of automation on the individual equipment level. Productivity gains and a green dividend will only increase as sites become more fully integrated. In some ways, the best parts of such a future are already here.
Gavin Schrock is a practicing surveyor, technology writer and operator of a cooperative GNSS network.
Last year I was privileged to be part of a Blue-Ribbon Review Panel for an American Society of Civil Engineers (ASCE) surveying publication. The book is Surveying and Geomatics Engineering: Principles, Technologies, and Applications. I recently received my copy of the published book in the mail and decided to highlight some sections. While preparing this column, the chapters reminded me of how geodesy has expanded into so many different disciplines.
I first mentioned this in my July 2020 article for the “First Fix” column of GPS World, where I stated that the shortage of American trained geodesists poses a significant economic risk for the United States. In that column, I mentioned how geodetic science and technology now underpin many sciences, large areas of engineering (such as driverless vehicles and drones), navigation, precision agriculture, smart cities and location-based services. That is why I believe understanding geodesy is more critical today than ever. In January 2022, Mike Bevis, collaborating with others, prepared a white paper titled “The Geodesy Crisis,” documenting the concern about the lack of trained geodesists in the United States.
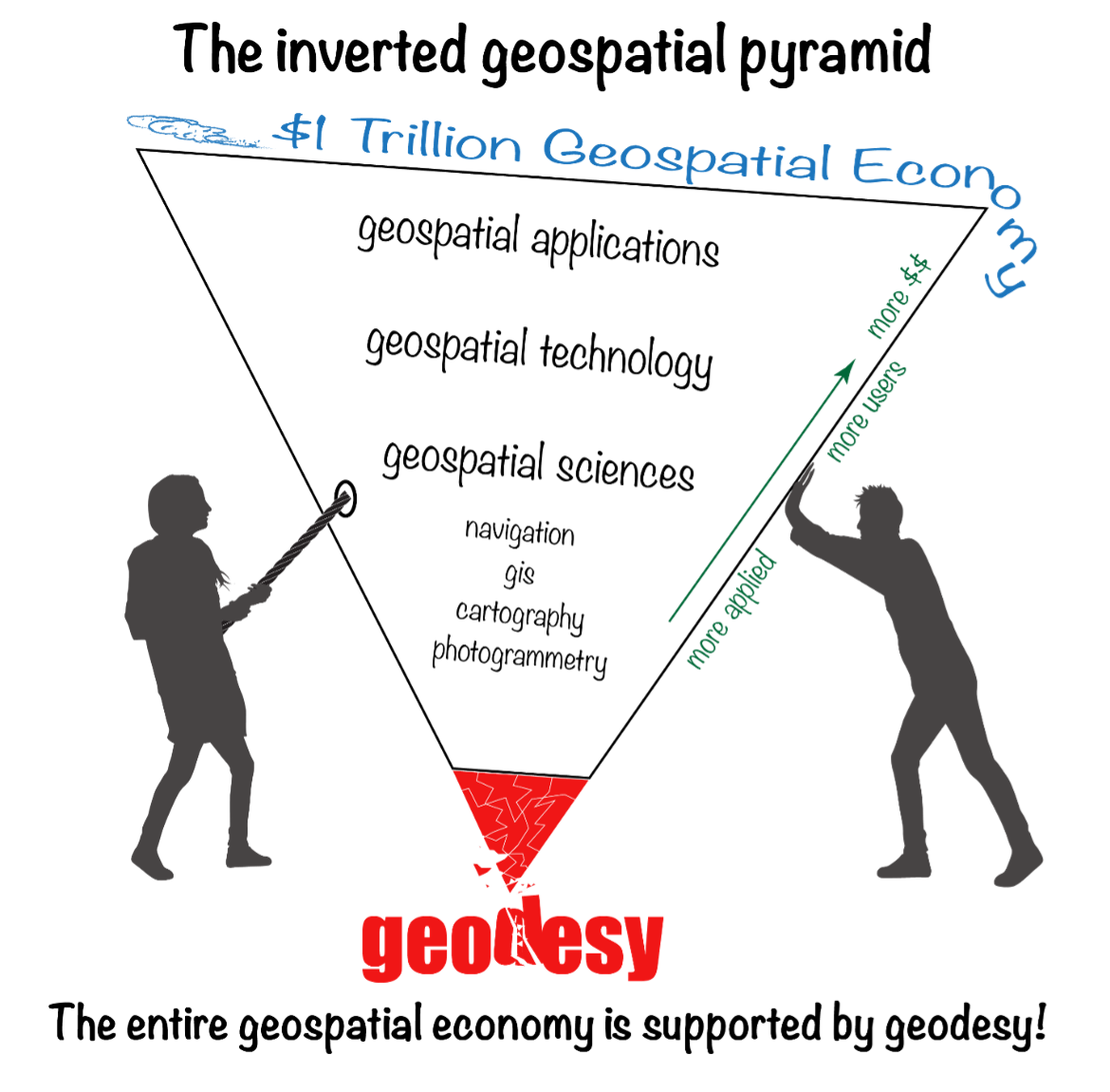
Image: Dana Caccamise II
“The inverted geospatial pyramid” graphic depicts how the entire $1 trillion geospatial economy is supported and dependent on geodesy, and how it’s close to collapsing without an increase of support for geodesy. A lack of geodetic expertise in the United States presents a significant challenge, with future impacts on positioning, navigation, mapping and dependent geospatial technologies.
In my opinion, without investment in geodesy, the United States will not have the available skills and knowledge to develop new geodetic technologies and improve models to address challenges to society, such as
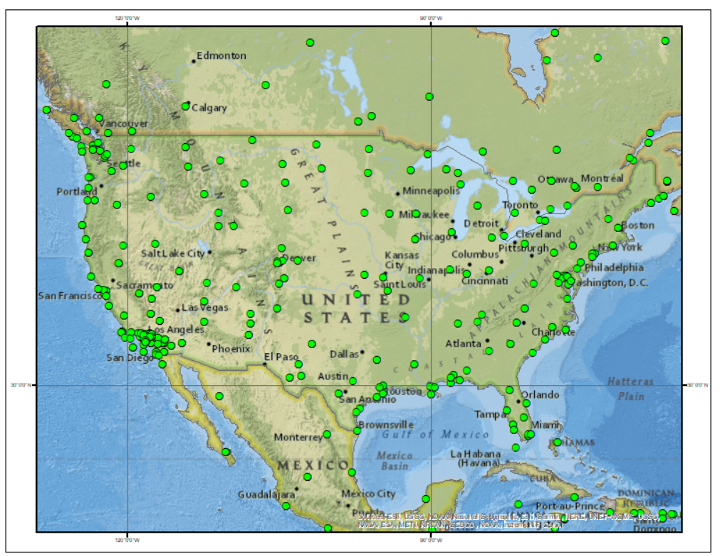
how the Earth’s surface is changing as sea level rises and the Earth’s glaciers and ice sheets change on timescales of months
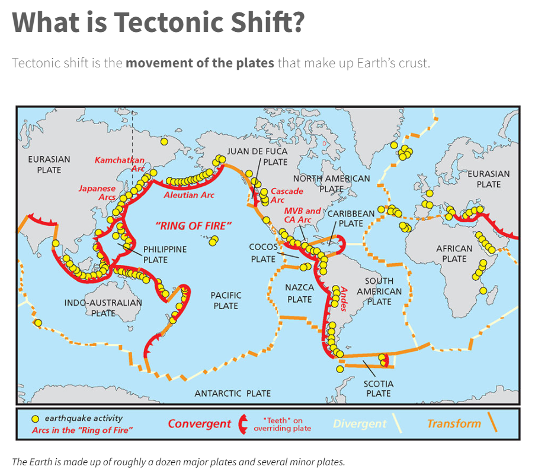
how the tectonic plates are deforming and what physical processes control earthquakes, and
the ability to monitor the temporal changes in Earth’s water reservoirs by measuring changes in Earth’s gravitational field as it responds to the moving water mass and the deformation of the solid Earth caused by moving water.
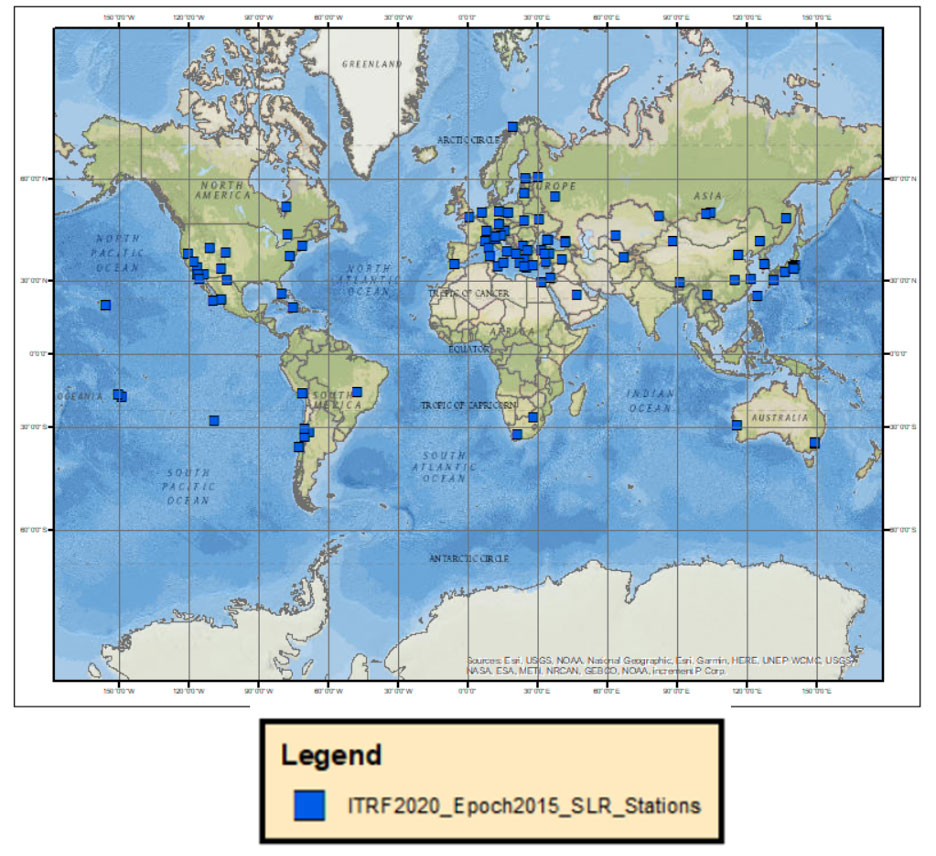
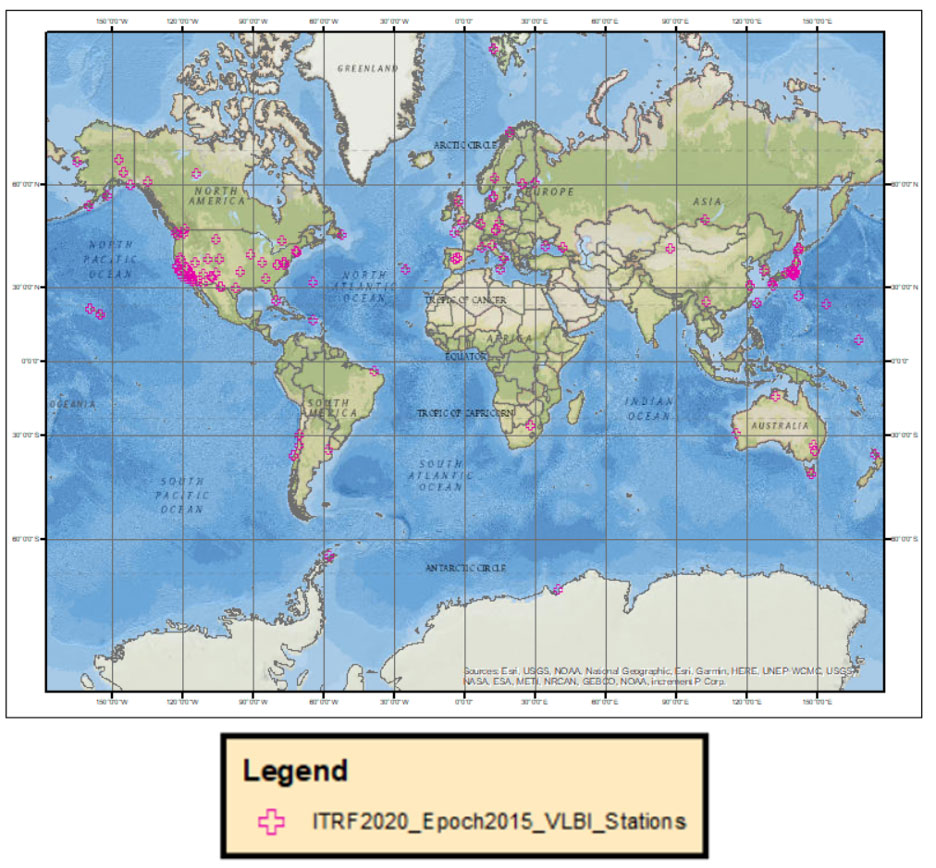
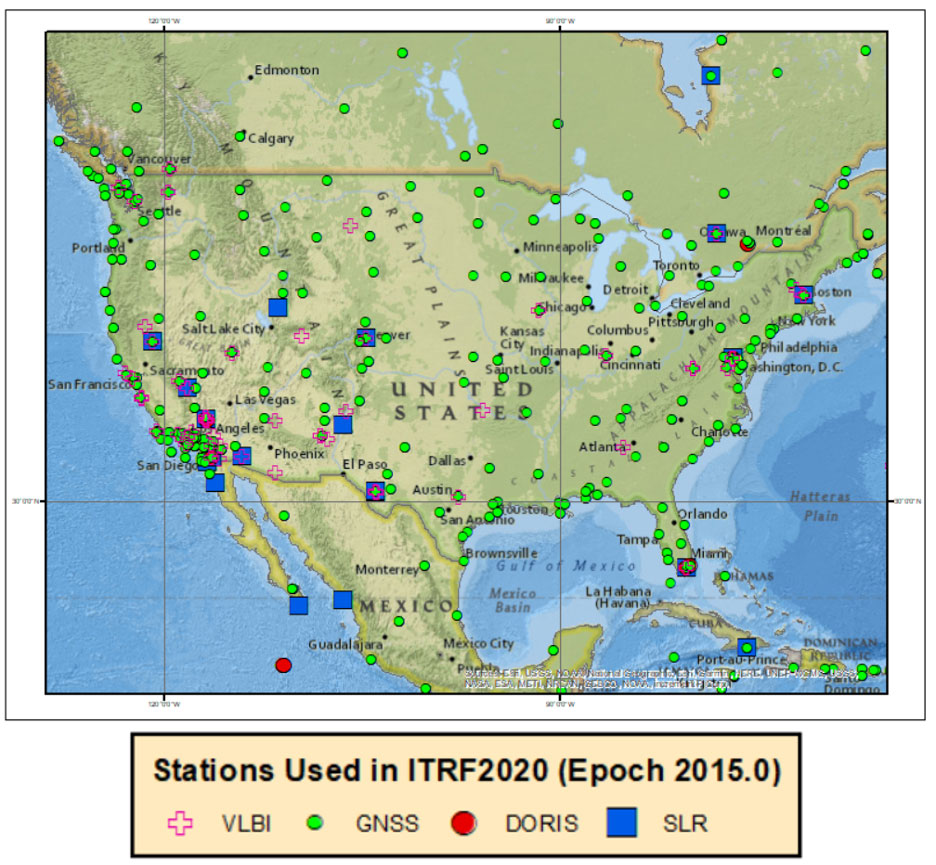
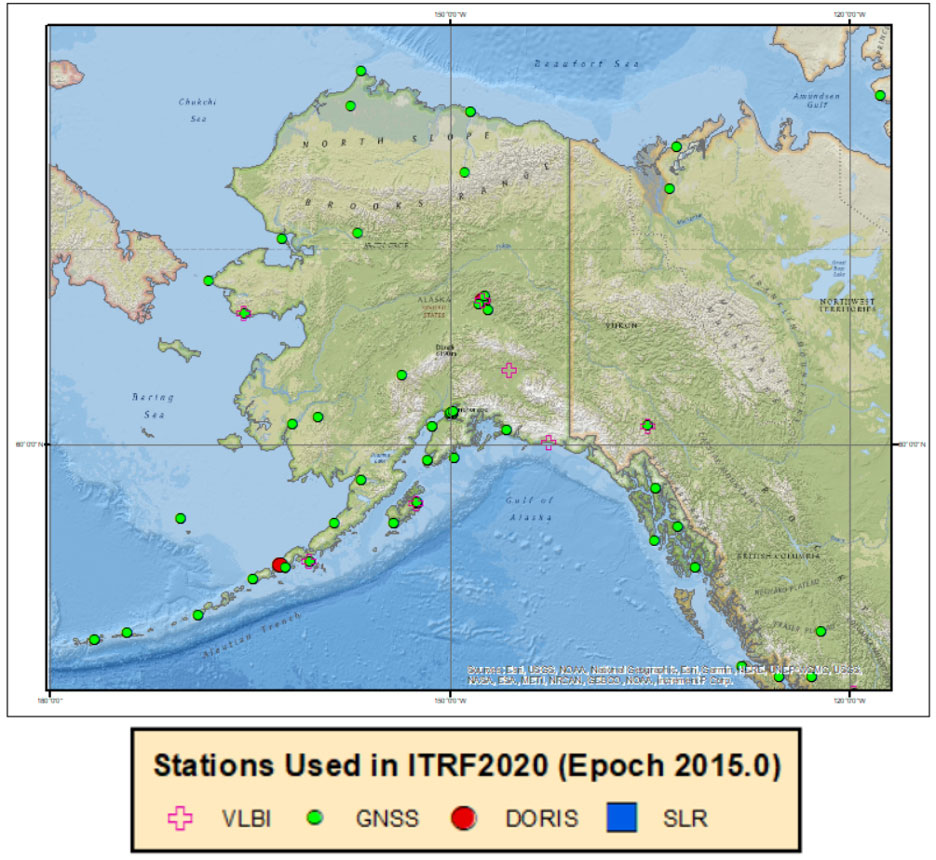
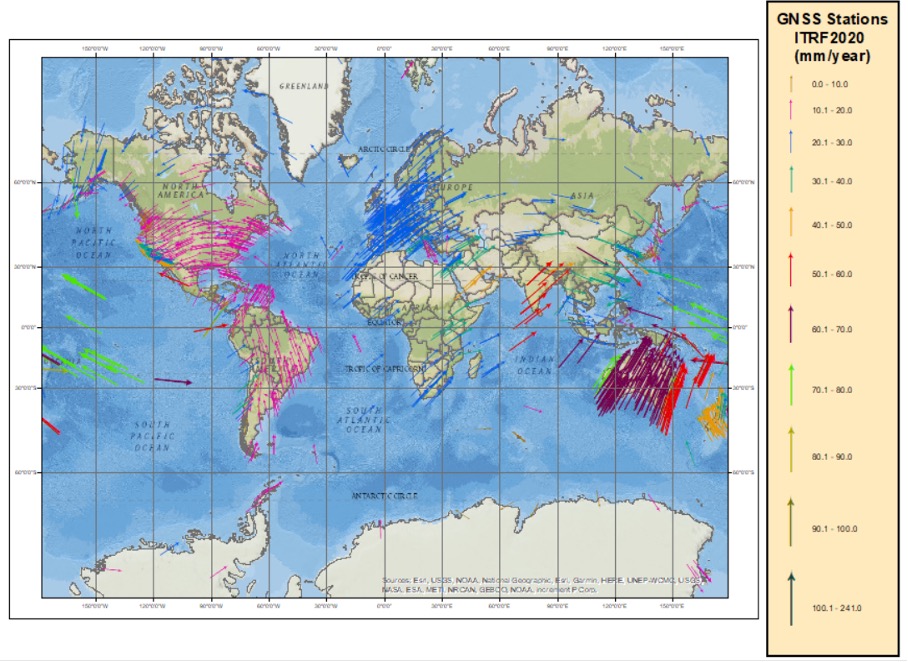
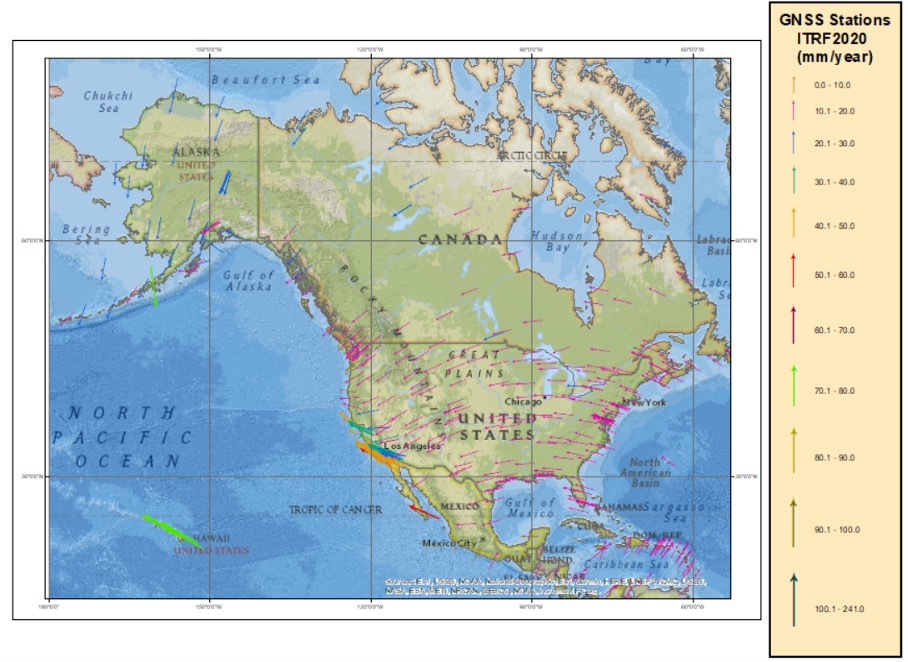
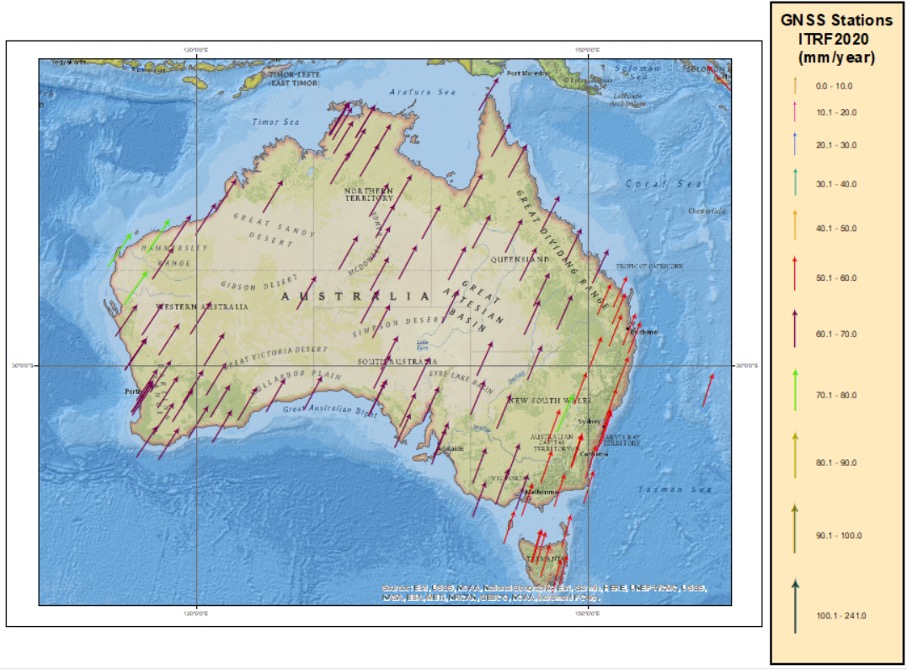
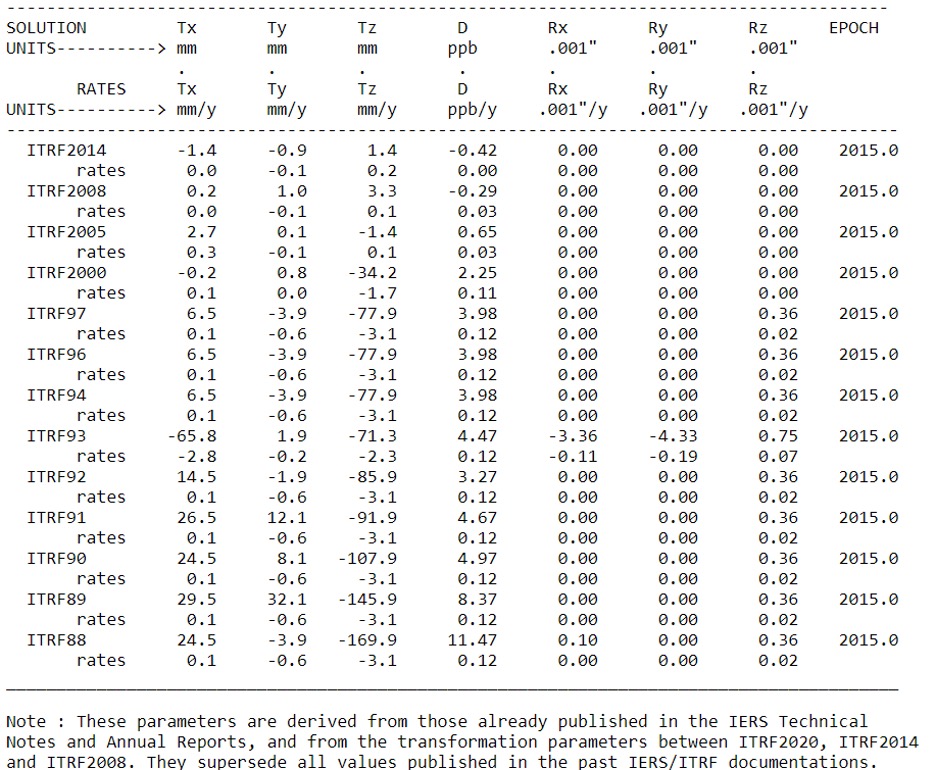
These challenges need a well-maintained, stable terrestrial reference frame (TRF) with sub-1 mm/year vertical accuracy. Errors in TRF heights can propagate systematically into estimates of atmospheric water vapor, sea level, satellite orbits and other parameters. An accurate TRF can lead to important observations and discoveries because it enables revelations from coherent global motions. (My previous column described the latest International Reference Frame of 2020 [ITRF2020].)
Geodesy has been a significant part of my life for 50 years. I’ve seen a lot, and unless we address the Geodesy Crisis, the innovations in geodetic science of the past will not continue in the future. At least not in the United States.
The Geodesy Crisis paper was mentioned in the Fall 2022 ION Quarterly Newsletter by Everett Hinkley (see the box below). Hinkley noted, “The geospatial community relies on geodesists, though few in the community are fully aware of this connection nor understand the importance of geodesy to their work.” I encourage everyone to download the white paper and the ION Quarterly Newsletter to understand the importance of the need for more trained geodesists.
Excerpt from Everett Hinkley’s Article
“In January 2022, a white paper entitled America’s loss of capacity and international competitiveness in geodesy, the economic and military implications, and some modes of corrective action was released (Bevis et al.). This collaborative paper paints an alarming picture of the dwindling pool of trained geodesists within the United States. The report highlights America’s loss of capacity and international competitiveness in geodesy and states: ‘The U.S. is on the verge of being permanently eclipsed in geodesy and the downstream geospatial technologies. This decline in capability threatens our national security and poses major risks to an economy strongly tied to the geospatial revolution, on Earth and, eventually, in space.’ Though the word crisis correctly describes the dire predicament well, it didn’t occur overnight. Due to several converging trends, the geodesy crisis has been decades in the making. A national lack of geodetic expertise presents a significant challenge with downstream impacts on positioning, navigation, mapping, and dependent geospatial technologies. The Department of Defense, intelligence community, and federal civil agencies’ mapping entities rely on accurate and precise maps for a broad range of purposes, and reliable maps depend on an accurate geodetic underpinning. The geospatial community relies on geodesists, though few in the community are fully aware of this connection nor understand the importance of geodesy to their work.” (Reproduced with permission from ION.)
In my “First Fix” column, I mentioned that I attended The Ohio State University (OSU) to obtain my graduate degree in Geodetic Science in 1979. Therefore, I admitted that I am a little biased — once a geodesist, always a geodesist. That said, in OSU’s geodesy heyday (1960–1990s), many Americans trained were sent there by federal agencies: National Geospatial-Intelligence Agency (NGA), NOAA/National Geodetic Survey (NGS), USGS, Army, Navy and Air Force. During the 1970s, NGS sent two employees back to school every year. These agencies needed geodesists because they were undertaking significant projects, such as the NGS projects to readjust the U.S. national horizontal (NAD83) and vertical geodetic (NAVD88) networks. I was one of the employees NGS sent to OSU to be trained to support the NAD83 and NAVD88.
Today, the environment is different. U.S. federal agencies still need geodesists to develop enhanced and refined geodetic models and tools. However, major U.S. companies, such as Google and FedEx, the automobile industry, the construction industry (automated machine guidance), precision farming companies and mining companies also need more accurate geodetic models, tools and algorithms. Therefore, these companies also need trained geodesists to perform essential research on topics that address their geodetic requirements. As indicated in “the inverted geospatial pyramid” graphic, the entire $1 trillion geospatial economy is supported by geodesy.
As implied in Hinkley’s article, geodesy has played a role in developing geospatial products but most users didn’t realize that it was their foundation. Since it’s been in the background, everyone assumes it will always be there. A participant at one of my workshops stated that “GPS has made geodesists out of all of us.” In my opinion, the advancements in GNSS equipment and processing software provided some users with a “false sense of knowledge or security” that they understood what was happening within the “black box.” One of my colleagues at NGS said that the new equipment and software programs were creating a field force of “buttonologists.”
These statements concerned me at the time and concern me today. With the last generation of trained geodesists either retired or getting ready to retire, we are at a critical stage of not being able to meet the geospatial needs of the future. As indicated in the white paper, there are significant challenges in rebuilding programs that support the training of geodesists.
Hinkley’s article summarized several action items that could help improve the lack of trained geodesists in the United States. I’ve provided his list in the box below. I’ve highlighted several items the surveying and mapping community can help achieve.
So how do we build and educate the next generation of geodesists?
Make the White House and Congress aware of this crisis, particularly its national security implications; seek direct support in the federal budget to correct this issue. It has become clear that, without engagement at the highest echelons of the U.S. government, averting this current crisis and its eventual outcome is unlikely.
Teach rigorous math in our public schools; follow the scholastic math approach used in many Asian and European countries.
Encourage creative thinking!
Actively market geodesy in high schools as a rewarding career for the math stars before college entry.
Build back, support and sponsor geodesy programs at select universities. This support needs to be strategic, with backing from the highest levels of the U.S. government.
Break our cultural trend of reactions to crises and seize the opportunity to be proactive and prevent the foreseen consequences of this crisis.
Encourage U.S. government support in the form of grants, professional development of staff, and research collaborations/affiliations. There are early efforts underway to bring new talent into the pipeline:
the National Geospatial-Intelligence Agency (NGA) is forming an emerging scientist consortium (ESCON) with partnerships that exist with Ohio State, UT-Austin, and other industry/academic/government partners
a pilot Ph.D. geodesy educational program with three NGA and one NGS employee is in place; the NGA expects to continue growing this program.
the NGA’s new western headquarters in St. Louis will bring 350 companies and organizations into the regional GEOINT ecosystem.
If we answer this call to action collectively, there is hope that a new cadre of U.S. geodesists can be cultivated before it’s too late to recover.
(Reproduced with permission from ION.)
With all that said about the need for more geodesists, one thing that this ASCE publication may do is make some readers realize how much they don’t know about the roots of the technology that they’re using to create geospatial products and services. This knowledge gap is not just correctly using GNSS and other geospatial technology to perform a survey, but also integrating various instruments to create an accurate mapping system, such as mobile mapping and terrestrial laser systems. My intent is not to criticize the expertise or knowledge of anyone, and I only mean to point out that in today’s use of computers and programs, many technical concepts are hidden in “black boxes.” I learned many things about some topics by reviewing this book.
The book is 556 pages and has 15 chapters. As part of my responsibilities as a Blue-Ribbon Panel member, I read every word in the book, and not many people will read the entire book. Still, I would encourage surveyors, engineers, geodesists, photogrammetrists and GIS and remote-sensing practitioners to obtain a copy of the book for reference and to understand the limitations of geospatial technology.
Now to the book’s content. I want to highlight that the forward is written by Juliana Blackwell, director of the National Geodetic Survey (NGS). She states that “A common thread running through the manual is the importance of the National Spatial Reference System (NSRS) to modern geospatial applications.”
Most of my columns highlight something relevant to the NSRS. That’s because the NSRS is the foundation layer for United States federal geospatial products, and geodesy provides the foundation for all geospatial products and services as indicated in the “The inverted geospatial pyramid” figure.
I would also like to highlight a statement by Gene Roe in the preface. He states, “Because entire books could be devoted to each of these topics, this manual only provides a summary, and it points the readers to important references where they can find more details. The manual is meant to provide a comprehensive but general overview to help support education and inform practicing engineers on the important role of the surveying engineer. It is too important for this not to occur.”
I agree with Roe’s statement that the book is important for surveying engineers. Still, I would add that this book is important to anyone working with GNSS and other geospatial data, especially geodesists, surveyors and GIS practitioners.
This publication is edited by three individuals that are licensed surveyors; two of them are geodesists who work for NGS. These individuals have performed a fantastic job of ensuring that all chapters have been reviewed for correctness and that the information provided is current and essential for users of geospatial data.
Readers can download copies of the book and specific chapters here. You can buy it as an e-book or in print. The “Abstract” box summarizes the book from the ASCE Library website.
Abstract
Sponsored by the Surveying Committee of the Surveying and Geomatics Division of the Utility Engineering and Surveying Institute of ASCE and the National Geodetic Survey of the US National Oceanic and Atmospheric Administration
Surveying and Geomatics Engineering: Principles, Technologies, and Applications, MOP 152, is a comprehensive yet general overview to help support education and inform practicing engineers on the important role of the surveying engineer. It provides a much-needed update on the modern practice of surveying and geomatics engineering.
Topics include:
• geodesy
• coordinate systems and transformations
• least squares adjustments and error propagation
• modern surveying and remote sensing technology
• analysis and establishment of control
• geographic and building information systems
• construction surveying, and
• best practices.
MOP 152 can be used as a summary and a reference for practicing engineers, surveying and otherwise, to help provide a solid understanding of the state of the surveying and geomatics engineering field.
Below is a list of the chapters and their authors. This column cannot highlight everything important in this book, but I will select a few items to which I believe users of geospatial data should pay attention.
Chapter Titles
Chapter Number
Chapter Title
Author(s)
Forward
Juliana P. Blackwell
Preface
Gene V. Roe
Acknowledgments
Daniel T. Gillins
1
Engineering Surveying Within ASCE
Gene V. Roe
2
Geodesy and Geodetic Computations
Earl F. Burkholder
3
Map Projections and Local Coordinates Systems
Michael L. Dennis
4
Local, Regional, and Global Coordinates Transformations
Michael L. Dennis
5
Analysis and Adjustment of Observational Errors
Charles D. Ghilani
6
Satellite-Based Surveying Technology
Jan Van Sickle
7
Leveling and Total Stations
N.W.J. Hazelton
8
Terrestrial Laser Scanning
Michael J. Olsen
9
Mobile Terrestrial Laser Scanning and Mapping
Michael j. Olsen, Jaehoon Jung, Erzhuo Che, Chris Parrish
10
Aerial Surveying Technology
Michael J. Starek, Benjamin E. Wilkinson
11
Survey Control
Daniel T. Gillins
12
Construction Surveys
Marlee A. Walton
13
Survey Records
Andrew C. Kellie
14
Information Systems in Civil Engineering
Yelda Turkan, Dimitrios Bolkas, Jaehoon Jung, Matthew S. O’banion, Michael Bunn
15
Professional Services and Design Professionals Agreements
David E. Woolley, Lisa D. Herzog
As a geodesist, I usually focus on topics relevant to geodetic science. This book has a lot of topics that use geodesy concepts to create an engineering product or service. For example, chapter 2, “Geodesy and Geodetic Computation” by Earl Burkholder, provides a good summary of geodetic concepts that anyone using or generating geospatial products should know and understand. It gives basic equations without lengthy derivations of how they were developed.
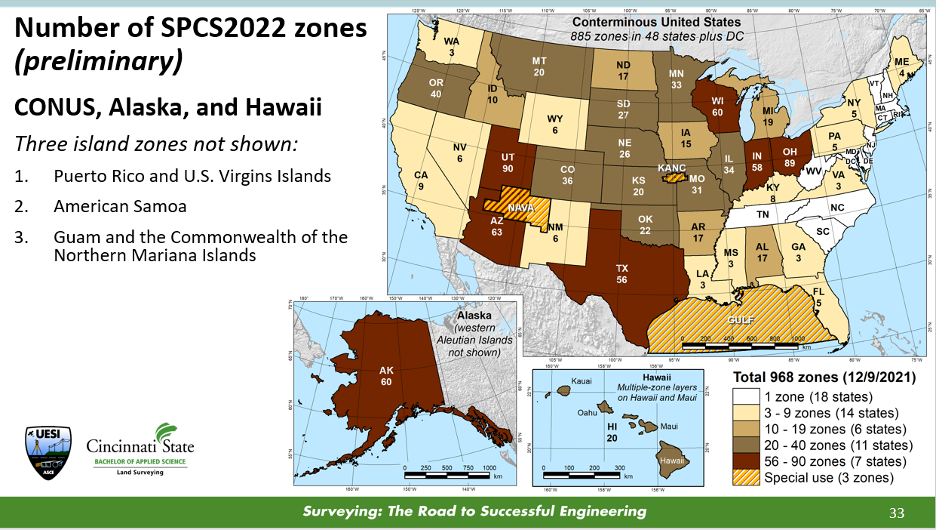
In my opinion, chapter 3, “Map Projections and Local Coordinates Systems” by Michael Dennis, does the best job of explaining the concepts of map projections that are relevant to the surveying and mapping community. Many GIS practitioners use map projections in their software but don’t have a working knowledge of what’s happening to their original data. This chapter describes the current United States State Plane Coordinate System of 1983 (SPCS83) and the future State Plane Coordinate System of 2022 (SPCS2022) that is scheduled to be adopted in 2025. Dennis uses figures and diagrams to describe map projections, angular and linear distortion, and methods for reducing map projection distortion to make it easier for readers to understand the concepts. One section of interest to many surveyors after SPCS2022 is adopted is the Low-Distortion Projection (LDP) Coordinate Systems section. This is useful because, in SPCS2022, many states have designed LDP systems for their state’s SPCS2022. The box below provides a diagram with the number of zones for each state.
Image: NGS Presentations Webpage “Grids for the Future: A New Approach for Designing State Plane Coordinate System Zones” by Michael Dennis.
One purpose of an LDP is to reduce linear distortion; it is not a new concept. Many surveyors have performed a simplified form of it for decades. It’s known by many as a “modified” or “scaled” State Plane. The American Congress on Surveying and Mapping (ACSM) taught a workshop for decades describing how to compute a “modified” State Plane Coordinate. I was an instructor of this class in the 1980s and 1990s. “Modified” State Plane Coordinates had several issues, but they worked reasonably well in small areal extents. Today, with the advancements in computers and computer software, there are better ways to accomplish an LDP. Dennis’ section does a great job explaining the new SPCS2022 and the design of LDPs in the SPCS2022. The use-case examples provide a simplified description of understanding the linear distortion behavior in an area.
Chapter 4, “Local, Regional, and Global Coordinate Transformation” by Michael Dennis, is one that every surveyor and GIS practitioner should read. Dennis highlighted the differences between “equation-based” transformations and “grid-based” transformations, as well as combined equation-based transformations with grid-based transformations. Understanding the information provided in chapter 4 will be important when NGS replaces the NAD 83 (2011) and NAVD 88 datums with the new, modernized NSRS in 2025. NGS will provide models and tools for users to perform coordinate transformations, but hopefully, some users will want to understand what’s happening behind the scenes.
Chapters 8 and 9 discuss laser scanning systems. In chapter 8, “Terrestrial Laser Scanning,” the “Data Quality Considerations” section highlights common artifacts or limitations encountered with terrestrial lidar system data. The authors provide many examples of these artifacts, making the concept easy to understand. At the end of this chapter, there are 14 pages of references that will be very helpful to users involved with terrestrial laser scanning systems.
Chapter 9, “Mobile Terrestrial Laser Scanning and Mapping,” is very informative, especially the section on georeferencing. This section is not just the description of properly using GNSS to perform a survey, but also the integration of various instruments to create an accurate mobile mapping system. I like how the authors discussed the error sources in georeferencing the system, listed the source, and provided an explanation of the error.
Anyone performing a GNSS survey project that meets NGS’s requirements needs to read chapter 11. I like the section describing how users should evaluate CORSs before using them as control. Evaluating CORS is something all users should do before using any CORS in their project, because not all CORS are created equal. See the excerpt from chapter 11 below for the recommended steps from the author.
Excerpt from Chapter 11 – Steps for Evaluation of CORS
The author recommends the following steps:
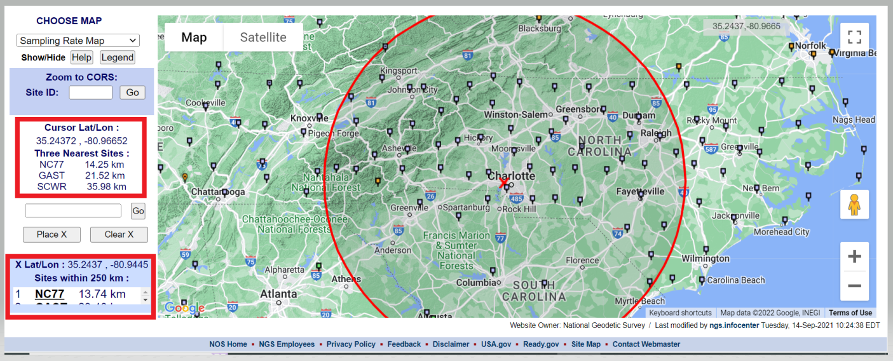
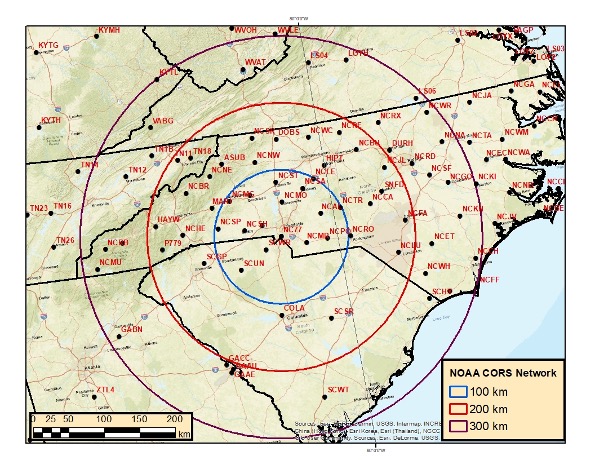
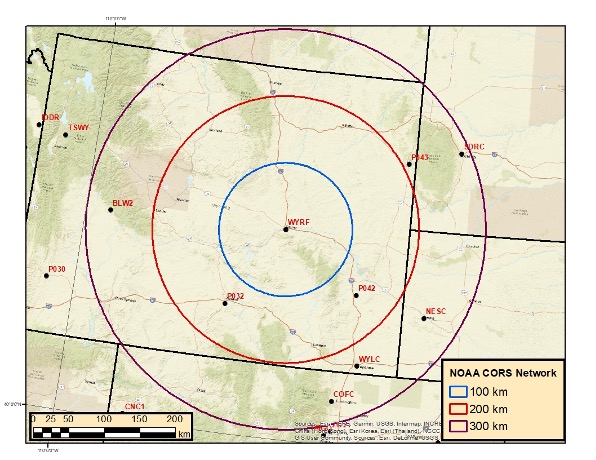
1. Choose stations that are within 100-300 km of a project site. It is well known that errors in GNSS baseline processing are directly correlated with baseline length (Chapter 6). Tropospheric delay is reduced when baselines are shorter and atmospheric conditions at each end of the line are similar. In addition, mutual satellite visibility at each end of the line for differencing diminishes as baselines grow longer. That said, errors in GNSS processing are more occupation time-dependent than baseline length-dependent (Eckl et al. 2001). Therefore, for short GNSS sessions (i.e., < 2 hours), choose CORS within approximately 100 km as control; for moderate GNSS sessions (i.e., 2 to 8 h), choose CORS within approximately 300 km. Note that even longer baselines can be successfully processed when GNSS sessions are very long in duration (e.g., up to 2,000 km for 24 h sessions).
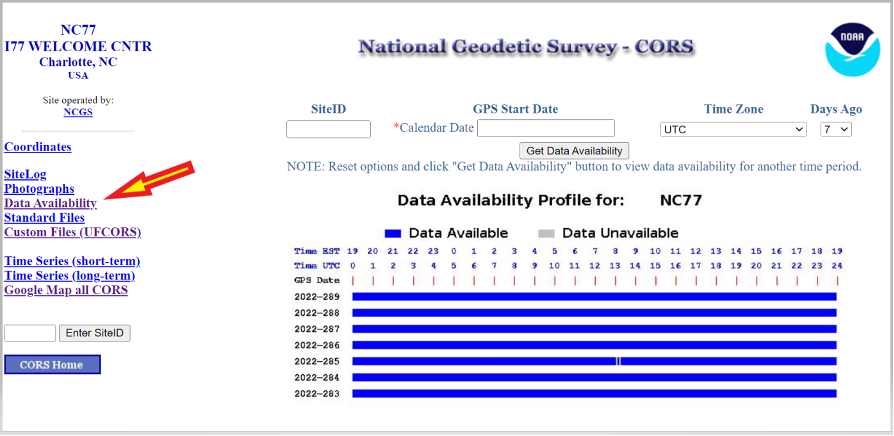
2. Determine if GNSS data are available at a given CORS during the time of your survey. Of course, if data are unavailable, then the station simply cannot be used as control. NGS provides a tool known as “User Friendly CORS (UFCORS)” for entering a date and time range to view available data at a given station (NGS 2021c). This tool can also be used to download the raw GNSS data for processing and adding a station to the survey network.
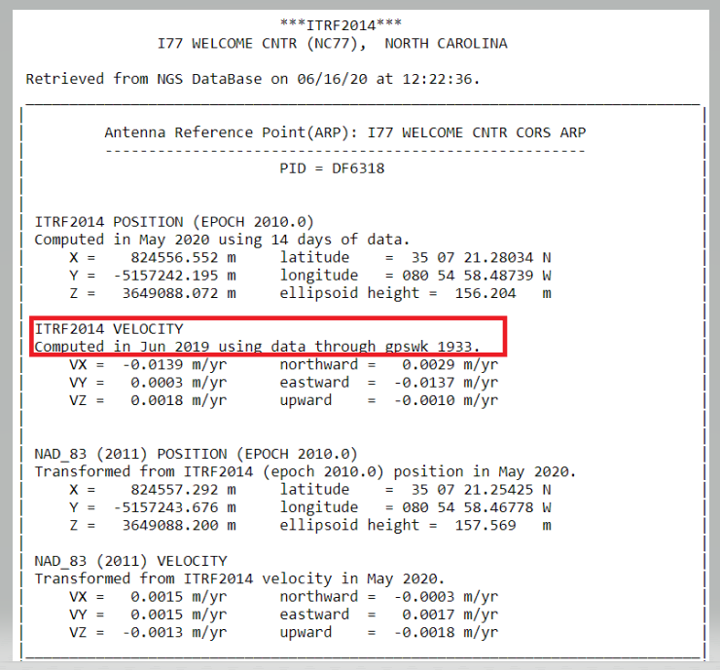
3. As discussed previously and when possible, choose a CORS with computed velocities rather than modeled velocities from HTDP. NGS provides tables of official coordinates with “computed” versus “htdp” coordinates and velocities on the website for CORS.
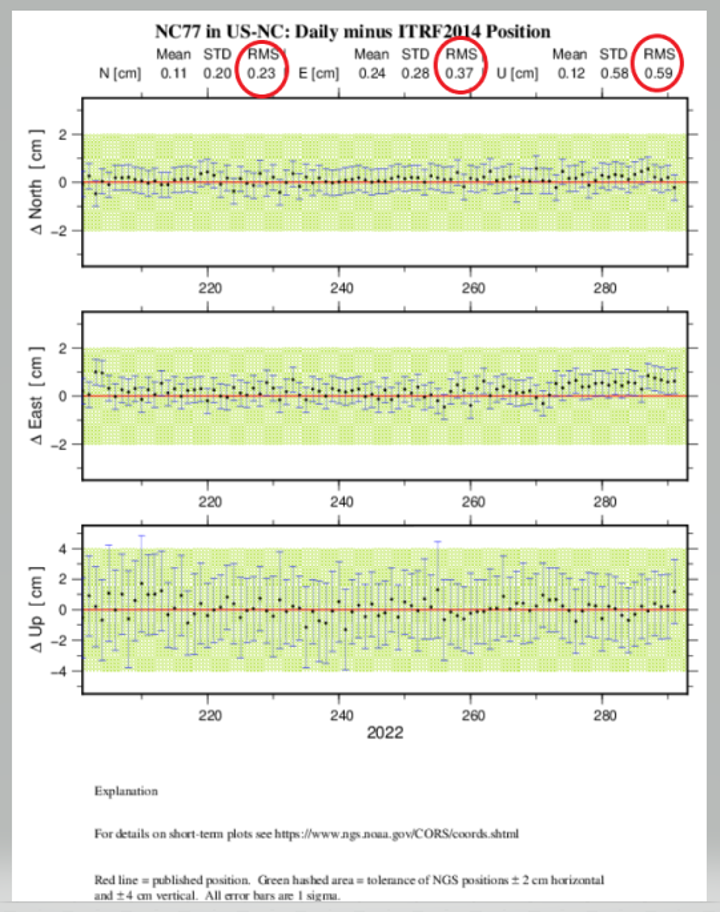
4. Review the aforementioned short-term time-series plot for the station, ideally at the time of the project. Stations with large spikes, data gaps, bias from the published “red” line, or large standard deviations should be avoided. A good rule-of-thumb is for the RMS in the short-term time-series plot (Figure 11-2) to be less than 1.0 cm in north and east and 2.0 cm in the up direction in a local geodetic horizon frame at the station.
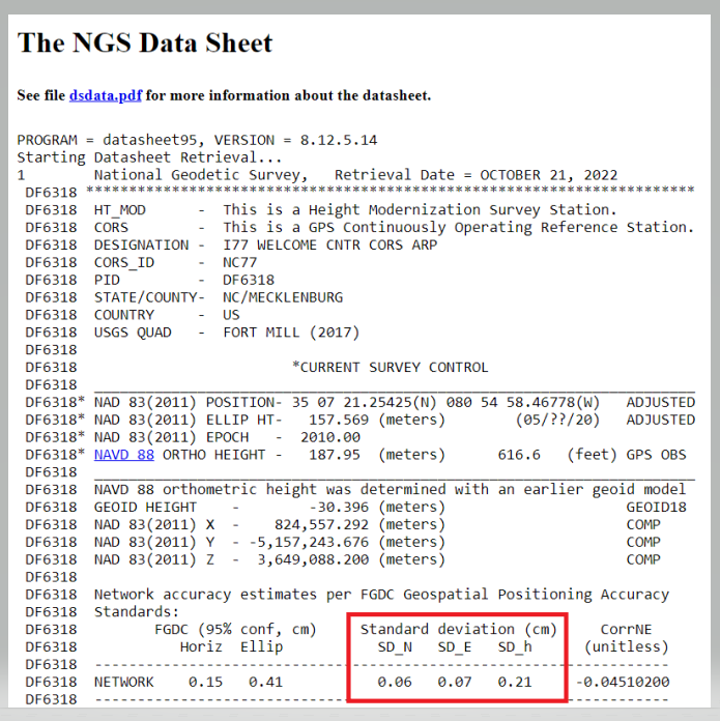
5. Examine the formal uncertainties for the official coordinates of the CORS. Standard deviations in north, east, and up are provided on the station’s datasheet, accessible from the webpage for the CORS (more on datasheets are discussed in the following under Passive Control). Stations with unusually large standard deviations (> 3 cm) should be avoided. Note that standard deviations are not available for CORSs with modeled velocities.
I believe that the evaluation of NOAA CORS is critical, so I’ve described Dan Gillins’ “Steps for Evaluation of CORS” below. First, users can access the NOAA CORS using the NGS CORS Map utility. After the map appears, users can move the cursor over the center of the project area, where it provides the location of the cursor and the three closest CORS. Users can click on a CORS icon and get coordinates and other information about the CORS. Also, they can place an X on the map, and the utility will draw a 250-km circle around the point. The box in the lower left-hand side of the map provides a list of the sites within 250 km of the marked location.
Users can download the NOAA CORS coordinates and velocities (computed and modeled). I downloaded the files and plotted three circles (with radii of 100, 200, and 300 km) around CORS NC77 in Charlotte, North Carolina. I only plotted CORS that are operational and have computed velocities. North Carolina has a lot of CORS to select from. In contrast, I’ve plotted three circles (also with radii of 100, 200 and 300 km) around CORS WYRF in Casper, Wyoming.
Buffer Zones around Charlotte, NC
Image: Dave Zilkoski
The plot depicting the buffer zones around Casper indicates that there are no CORS within the 100-km circle and only a few between 100 and 200 km.
Buffer Zones around Casper
Image: Dave Zilkoski
The data availability of the CORS site can be obtained by clicking on the CORS icon, selecting “Get Site Information,” and then selecting “Data Availability.”
There are too many chapters to describe each one, but I encourage users to check each chapter’s abstract on the ASCE website and decide which ones would be the most beneficial to them (see the box titled “Abstract for Chapter 11 Survey Control”). The manual provides numerous references and can serve as a helpful resource for finding further details on the fields of geodesy and surveying.
A goal of mine is for some readers of this column to obtain enough knowledge to “whet their appetite” and encourage them to pursue an education in geodesy and surveying. Others who are influential in federal government programs and those responsible for geospatial research for industries will recognize the need for more trained geodesists in the United States and help by doing the following:
actively market geodesy in high schools as a rewarding career for the math stars before college entry
build back, support, and sponsor geodesy programs at select universities; this support needs to be strategic with backing from the highest levels of the U.S. government
encourage U.S. government support in the form of grants, professional development of staff, and research collaborations/affiliations.
On Aug. 5, the National Geodetic Survey (NGS) stated it will be updating the NOAA CORS to be aligned with the latest International Terrestrial Reference frame, ITRF2020 (see below). As stated in the announcement, NGS will soon compute a third multi-year continuously operating reference station (CORS) solution, MYCS3.
The last multi-year CORS solution, MYCS2, was performed by NGS in 2019. I discussed the MYCS2 in my February 2019 and April 2019 columns. This new multi-year CORS solution will be important to the 2022 modernized National Spatial Reference System (NSRS), because NGS will establish a strict mathematical relationship between the 2022 NSRS frames and the ITRF2020 frame. This will allow direct access to the NSRS (NOAA Technical Report NOS NGS 67).
NGS Aligns National System to Global Reference Frame
August 5, 2022
The International Global Navigation Satellite System (GNSS) Service, which provides GNSS data products globally, recently released a new GNSS-only version of the International Terrestrial Reference Frame. This provides GNSS users access to the reference frame through coordinate functions for a global set of reference stations. In response, NGS will soon compute the multi-year Continuously Operating Reference Station (CORS) Solution 3, which will modernize the National Spatial Reference System. Aligning the National Spatial Reference System with the updated global reference frame will allow greater access for the global community of scientists, educators, and commercial users of location science.
For more information, contact: Phillip McFarland
As in the past, the multi-year CORS solution will mean that the NOAA CORS coordinates will be updated to be consistent with the latest International Terrestrial Reference Frame of 2020 (ITRF2020). The International GNSS Service provides information about its GNSS products and services. Readers can find information on the latest International Terrestrial Reference Frame 2020 here. This column will provide basic information on the ITRF2020. Please note: NGS stated that it will soon start computing the third multi-year CORS solution, but — as of October — all NOAA CORS coordinates are still based on MYCS2 and provide coordinates in ITRF2014 epoch 2010.00 and NAD 83 (2011, MA11, PA11) epoch 2010.00. As in the past, NGS will provide advance notice before publishing the results of its third multi-year CORS solution.
A document on the ITRF website stated the ITRF2020 is expected to be an improved solution compared to the previous solution, ITRF2014. It listed several innovations introduced in the ITRF2020 processing.
ITRF2020 is the new realization of the International Terrestrial Reference System. Following the procedure already used for previous ITRF solutions, the ITRF2020 uses as input data time series of station positions and Earth Orientation Parameters (EOPs) provided by the Technique Centers of the four space geodetic techniques (VLBI, SLR, GNSS and DORIS), as well as local ties at colocation sites. Based on completely reprocessed solutions of the four techniques, the ITRF2020 is expected to be an improved solution compared to ITF2014. A number of innovations were introduced in the ITRF2020 processing, including:
The time series of the four techniques were stacked all together, adding local ties and equating station velocities and seasonal signals at colocation sites;
Annual and semi-annual terms were estimated for stations of the 4 techniques with sufficient time spans;
Post-Seismic Deformation (PSD) models for stations subject to major earthquakes were determined by fitting GNSS/IGS data. The PSD models were then applied to the 3 other technique time series at earthquake colocation sites.
The box below provides a good summary of the International Reference Frame and why it’s important to the scientific community as well as the surveying and mapping community. Readers can download the article from the June 2022 International GNSS Service Issue 4 newsletter. Users also can sign up to receive notices and newsletters from the International GNSS Service.
What is the current rate of sea level rise in different regions of the globe? How does our Earth deform under the effect of plate tectonics, seismic phenomena, or the melting of ice caps? How the Earth’s center of mass is varying? How to determine the position of a point on the surface of a constantly deforming Earth and compare it to positions estimated decades apart? The answers to these fundamental questions for understanding the dynamics of our planet require the availability of a global, long-term stable terrestrial reference frame, but preferably a standard reference so to ensure interoperability and consistency of various measurements collected by sensors on the ground, or via artificial satellites. The International Terrestrial Reference Frame (ITRF) is the standard reference recommended by a number of international scientific organizations, including the International Union of Geodesy and Geophysics (IUGG) and the International Association of Geodesy (IAG) for earth science, satellite navigation and operational geodesy applications. The ITRF is an international effort that is built on the investments of space and mapping agencies, universities and research groups in operating geodetic observatories, archiving and analyzing the collected geodetic observations to derive not only the ITRF, but also critical geodetic products for science and society.
The ITRF integrates and unifies technique-specific reference frames provided by the four IAG’s international services of space geodetic technique (DORIS/IDS, GNSS/IGS, SLR/ILRS, VLBI/ IVS). It is supplied to the users in the form of temporal coordinates of more than 1500 stations, Earth Orientation Parameters, as well as parametric functions describing nonlinear station motions: seasonal signals due to mainly loading effects and post-seismic deformations for sites subject to major earthquakes. It is necessary to regularly update the ITRF (approximately every 5 years) in order to benefit from continuous observations so to improve its accuracy, considering station position temporal variations due to geophysical phenomena.
The ITRF is maintained by a research group at IGN-France and IPGP (Institut de Physique de Globe de Paris), and whose new release called ITRF2020 was published on April 15 and accessible here: https://itrf.ign.fr/en/solutions/ITRF2020. The ITRF2020 brings significant improvements compared to previous achievements: it confirms the estimate of the position of the center of mass of the Earth as it was determined in 2016, but also provides its seasonal variations; it improves the accuracy of the scale of the frame at the millimeter level, which represents a gain in precision of a factor of 8 on the measurement of the size of the Earth (compared to that determined in 2016); it provides a precise quantification of co- and post-seismic displacements caused by devastating earthquakes, such as that of Sumatra in 2004, Chile in 2010 and Japan in 2011. The IAG Services rely on the ITRF to align their geodetic products to it, and therefore disseminate it widely among the various users. In particular, using the IGS products, such as the orbits, allows a universal access in space and time to the ITRF.
As stated in the article by Zuheir Altamimi, ITRF2020 involves IAG’s international services of four space geodetic techniques: DORIS/IDS, GNSS/IGS, SLR/ILRS, VLBI/ IVS. Computing an International Terrestrial Frame is very complex and requires analyses of difference types of geodetic and geophysical data. It is beyond the scope of this column, but online is more detailed technical information.
For this column, I downloaded the station lists from the four space geodetic techniques and provided a few plots that depict the location and velocities of these sites. The box below depicts the location of the space geodetic techniques around the world. As indicated in the plot, some locations have more than one technique collocated at the same site.
Plot of the Four Different Space Geodetic Techniques
Image: Dave Zilkoski
The following plots depict the locations using each space geodetic techniques: GNSS sites, DORIS sites, SLR sites and VLBI sites.
Plot of GNSS Sites
Image: Dave Zilkoski
Plot of DORIS Sites
Image: Dave Zilkoski
Plot of SLR Sites
Image: Dave Zilkoski
Plot of VLBI Sites
Image: Dave Zilkoski
The box below shows the location of the techniques in the conterminous United States.
Plot of the Four Different Space Geodetic Techniques in the CONUS
Image: Dave Zilkoski
The plot below depicts the sites in the state of Alaska.
Plot of the Four Different Space Geodetic Techniques in the Alaska
Image: Dave Zilkoski
The images below depict each of the four space geodetic techniques in the conterminous United States.
Plots of the Space Geodetic Techniques by Technique in the CONUS
Plot of GNSS Sites in CONUS Image: Dave ZilkoskiPlot of DORIS Sites in CONUS (Image: Dave Zilkoski)Plot of SLR Sites in CONUS (Image: Dave Zilkoski)Plot of VLBI Sites in CONUS (Image: Dave Zilkoski)
Altamimi’s article on the ITRF2020 stated it is “necessary to regularly update the ITRF (approximately every 5 years) to account for station position temporal variations due to geophysical phenomena.” My February 2022 column discussed the tectonic plates and why is it necessary to account for movement in a geodetic reference frame. As I stated then, coordinates basically change because the Earth’s surface is moving due to the movement of major tectonic plates. See the box titled “What is Tectonic Shift?” for information about why it is called plate movement or tectonic shift. The world’s geodesists understand this and are attempting to manage the changing coordinates by providing a time-dependent component of the international terrestrial reference frame.
Image: National Ocean Service websiteImage: National Ocean Service website
The box below depicts the horizontal velocity based on the ITRF2020 velocities (downloaded on 08/12/2022).
Plot of the Horizontal Velocity Vectors based on the ITRF2020 Velocities
Image: Dave Zilkoski
The box below depicts the horizontal velocities in the North America. These vectors look very similar to the velocities reported in my February 2022 column.
Plot of the Horizontal Velocity Vectors in North America based on the ITRF2020 Velocities
Image: Dave Zilkoski
For a comparison to North America vectors, the box below depicts the velocity vectors in Europe.
Plot of the Horizontal Velocity Vectors in Europe based on the ITRF2020 Velocities
Image: Dave Zilkoski
They are similar in magnitude, but not in direction. Once again, looking at the map of tectonic plates, North America is located mostly on the North American plate and Europe is on the Eurasian plate.
Australia is on the Indo-Australian plate and has some fairly large horizontal velocities vectors. See the box below.
Plot of the Horizontal Velocity Vectors in Australia based on the ITRF2020 Velocities
Image: Dave Zilkoski
So, what’s the difference between ITRF2014 and the new ITRF2020? The box below provides the 14 transformation parameters from ITRF2020 to ITRF2014. These transformation parameters have been estimated using 131 stations located at 105 sites. See the box “Plot of the Stations used in the Transformation Parameters from ITRF2020 to ITRF2014” for the location of these stations. Notice that the translation values in X,Y,Z are very small (<1.5 mm) between the two reference frames.
Transformation Parameters from ITRF2020 to ITRF2014
X,Y,Z are the coordinates in ITRF2020, and XS,YS,ZS are the coordinates in ITRF2014.
Plot of the Stations used in the Transformation Parameters from ITRF2020 to ITRF2014
Image: Dave Zilkoski
The transformation parameters from ITRF2020 and past ITRFs are provided in the table below. As indicated in the table, most of the changes in X,Y and Z are very small since ITRF2005.
Transformation Parameters from ITRF2020 to Past ITRFs
As previously stated, the third multi-year CORS solution will be important to the new 2022 modernized National Spatial Reference System (NSRS) because NGS will establish a strict mathematical relationship between the 2022 NSRS frames and the ITRF2020 frame. This will allow direct access to the NSRS, according to NOAA Technical Report NOS NGS 67. Again, there will not be any changes to NGS’s NOAA CORS coordinates due to ITRF2020 until NGS completes its third multi-year CORS solution.
Users can receive emails about the latest NGS News by signing up for NGS’s newsletters. These notices will highlight the release of new products, updates to existing services, progress reports for major projects, information about upcoming NGS-sponsored events, and job opportunities at NGS.
Full-power UHF TV stations in view in the continental United States: yellow (1—3 stations), green (4—6), red (7—10), orange (11 or more). (Image: NAB)
Over the years, we have seen several proposals to use television broadcasts for positioning, navigation, and timing (PNT). This idea was taken one step further in a paper by the staff of the National Association of Broadcasters (NAB). We talked with one of the authors, Robert Weller, NAB’s vice president for spectrum policy, to find out more.
Goward. Bob, your paper calls the notional system the “Broadcast Positioning System” or “BPS.” What is new about your proposal? And what led you and your colleagues to develop this idea and publish the paper?
Weller. Television broadcasters are transitioning to a new transmission standard, ATSC 3.0, that plays well with other industry protocols, has more robust operating points, stricter timing requirements, and is much more flexible. There are already more than 50 US markets with a station transmitting ATSC 3.0. Our paper began to analyze PNT in the context of ATSC 3.0 and confirmed that there was a good match. So, the idea of “broadcast positioning” was born.
Goward. In general, how would BPS work?
Weller. TV stations transmit from towers at known fixed locations. A TV station can transmit its precise location (geographic coordinates and antenna elevation) along with a time-stamp. For fixed receivers using the timing service, only one TV signal is required. Receivers would know their location a priori and would simply calculate their distance from the TV station and use that distance to determine the corresponding time that it takes for the signal to travel from the TV transmitting antenna. That time difference is then added to the received time-stamp to determine the present time at the receiver.
Both fixed and mobile users could access positioning and timing services when at least three TV stations are within range.
Goward. GPS and other GNSS are ubiquitous. What advantages do you see BPS having over space-based navigation systems?
Weller. BPS is not intended to replace GPS. BPS can provide an independent timing and/or position determination, which can provide confidence and help detect spoofing or other problems with GPS. BPS also has the advantage of high power and strong signal levels. Most UHF television stations radiate 1 megawatt of power, which does a good job penetrating buildings and is difficult to jam or spoof.
Goward. There have been many proposals for terrestrial systems to complement GPS. In general, what advantages would implementing BPS have over other non-space approaches?
Weller. There are several advantages. The cost to deploy will be less since the broadcast infrastructure is already in place. Also, because of our high power, the number of nodes necessary is fairly small. I’ll add that TV stations are built to operate 24/7, so most of them are fairly “hard” with back-up power and redundant transmitters. Additionally, the modulation and coding we propose for BPS is intended to provide service well above the noise floor, making it quite robust. Finally, low-cost receivers that are used in televisions can be used to decode the BPS information.
Goward. Your paper says that using the television stations we have today, geographically about 85% of the contiguous United States by land area would be able to get PNT services from BPS. The number is 99% for just timing services. Do you have any thoughts about those not in range for services?
Weller. Those percentages were intended to be conservative and only considered full-power UHF TV stations. There are also hundreds of VHF stations and thousands of low-power TV stations. If you include those stations, the coverage percentages are even higher. It’s certainly possible to add more stations if needed to reach the most remote and unpopulated parts of the United States.
Goward. What about user equipment? Have you done any work in that area? How small do you think receivers could be eventually?
Weller. There are compact GPS and Loran receivers out there, and the technology for BPS isn’t much different. Some Korean companies have already built very small ATSC 3.0 receivers to carry RTK corrections to GPS for use in drones. There are also already ATSC 3.0 USB receivers that weigh less than an ounce.
Goward. Are there other services that BPS could provide?
Weller. BPS can be one element of a PNT system-of-systems that also improves other PNT services. In my opinion, the most valuable service BPS can provide is an alternative reference for critical infrastructure if GPS is compromised. However, BPS would occupy a tiny fraction of ATSC 3.0 signal capacity. So, there could be additional services such as transmitting ephemeris data for expedited GPS acquisition, RTK data for improved PNT accuracy, or even map information.
Goward. Have you thought about what you would be using as a time source?
Weller. Most TV stations already have GPS, but since the point of BPS is to provide redundancy and resilience to GPS, we’re looking at cesium clocks, optical fiber, and eLoran as possibilities.
Goward. NAB is a trade association. How do you see this project benefiting your members?
Weller. This project affirms the public service mission of broadcasters as well as our designation as critical infrastructure. If broadcasters are compensated for the equipment and resources required for deploying and operating BPS as a public service, I expect high participation and user adoption.
Goward. Where do you think you and your colleagues will take the project from here?
Weller. We’re working with possible users to determine their requirements while also trying to identify funding sources to enable the development. We hope to build prototypes and launch market trials as next steps towards commercialization.
“Precautionary principle: The principle that the introduction of a new product or process whose ultimate effects are disputed or unknown should be resisted.” — Oxford Languages
Photo: U.S. Fish and Wildlife Service
The Arctic National Wildlife Refuge spans almost 20 million acres. It is home to a vast array of wildlife from tiny pollinating flies to giant grizzly and polar bears.
It also has oil. Lots of oil.
Getting that oil out of the ground and to market would create jobs and benefit commerce. It would also harm the environment. Some wildlife would suffer.
Many argue the long-term harms of drilling outweigh the short-term benefits. The Biden administration agrees and has banned drilling to protect the refuge’s environment and wildlife.
The administration has taken a similarly conservative approach to preserving the spectrum environment for satellites.
Like the previous administration, it has urged the Federal Communications Commission (FCC) to not allow Ligado Networks’ use of frequencies adjacent to spectrum assigned to GPS and Iridium Communications. The concern is that Ligado’s more powerful transmissions will harm some existing users.
A recent report by the National Academies of Sciences, Engineering and Medicine validated that concern. As is the case with many complex environmental issues, the total number of impacted individuals, and the total negative impact to the nation, are unknown. They may be unknowable.
As an independent agency, the FCC gets recommendations from, but does not report to, the administration. To date it has not been swayed by formal appeals from the executive branch, nor by those from numerous industry and non-profit groups, to rescind its decision allowing Ligado to operate.
Like other agencies making environmental decisions, the commission should use the “precautionary principle” when thinking about new uses and users. It is a well-recognized and systematic method of linking science and public policy.
increasing public participation in decision making
shifting the burden of proof to the proponents of an activity
taking preventive action in the face of uncertainty
exploring a wide range of alternatives to possibly harmful actions.
The first three of these were part of the FCC’s process in its Ligado decision, though critics of the outcome might question how rigorously each was applied:
Hundreds of public comments were received before the order was issued.
Critics note that opposition to the FCC’s eventual course of action was expressed by stakeholders across a very a broad spectrum of society.
The applicant, Ligado, was required to bear the burden of proof.
However, as the National Academies report says, different assumptions in Ligado’s analysis led it to an entirely different conclusion from studies done by the Department of Transportation.
The FCC order allowing Ligado to operate includes “preventative actions.”
Yet many see these preventative measures as unworkable window dressing. In the staid and reserved phrasing of the National Academies report, they “may in some cases not be practicable within operationally relevant time and financial parameters.”
Regardless of the virtues or sins of its process to date, the FCC’s path forward must hinge on the final tenant of the precautionary principle: “Exploring a wide range of alternatives in the face of uncertainty.”
The most obvious, simplest, and straightforward of these alternatives is for the FCC to assign Ligado different frequencies, ones more distant from those used by space-based applications.
Admittedly, this path is only “simple and straightforward” in concept. It will require restarting the frequency allocation process nearly from the beginning, detailed analyses, complex negotiations, and difficult decisions.
Yet the current situation means certain harm to an unknown but significant number of GPS and Iridium users. Harm that could, in some instances, be severe. Even life-threatening.
It also means harm for Ligado. As things stand now, the company will always be under a cloud in the minds of federal officials and other GPS and Iridium users. Ligado will also undoubtedly be blamed for a variety of problems not of its doing from solar weather to criminal jamming. And a significant mishap related to company-caused interference could cause it extreme harm. Perhaps even bringing about Ligado’s demise.
The radio frequency spectrum is a limited and critical national resource. The FCC’s desire to use it to best advantage is necessary and appropriate. This, however, requires great care to safeguard the overall environment and existing users.
Resolving the “Ligado issue” will require creativity and a departure from the adversarial approach that has characterized the FCC process to date. Let’s hope that as the commission reconsiders the issue, it finds a way for everyone to come out ahead.
In early August, the U.S. Government Accountability Office (GAO) released its third report in 15 months about GPS and other positioning, navigation and timing (PNT) issues within the Department of Defense (DOD). Each report raised raised concerns about the way in which PNT programs were being managed and led within the department.
Observations included that DOD continues to rely heavily on GPS despite known vulnerabilities. Also, that alternate PNT efforts are not well coordinated and receive little support.
“Opportunities” for DOD to improve its alternate PNT efforts, according to the report, include:
Improving coordination across the services
Clarifying authorities and responsibilities for prioritizing needs
Focusing on resiliency versus GPS as the cornerstone of department PNT efforts
Clarifying PNT requirements rather than just defaulting to GPS as “the need”
The report pointed out that M-code has been in development for 20+ years, and that GPS satellites have been capable of transmitting M-code signals since 2005. Also, while there are still program risks, the Next Generation Ground Control Segment, known as OCX, is forecast to be ready to support M-code use by 2023.
OCX has experienced severe cost overruns and is more than five years behind its original schedule. GAO issued a report on OCX delays in May 2019.
M-code won’t really be a capability in DOD, though, until user equipment is widely fielded. That will take several more years, according to GAO.
One of the remaining challenges to M-code implementation, GAO said, was that the department did not collect and validate all the data it needed for leadership planning and prioritization.
A summary on the first page of the report contains what could be seen as harsh criticism of how PNT efforts are led within DOD:
“DOD’s overall PNT portfolio is managed by the PNT Oversight Council, a statutorily established senior-level body. However, the Council has largely prioritized modernizing the existing GPS system over alternative PNT efforts during recent meetings and has no strategic objectives or metrics to measure progress on the alternative efforts.”
Image: DOD
Too Much Leadership?
Some believe the real problem with DOD PNT is not a lack of leadership, but rather too much.
“If everyone is in charge, no one is,” commented one retired senior military officer familiar with the issue.
“Congress has been concerned about DOD’s lack of attention to GPS and PNT alternatives for years,” the individual said. “In 2015 Congress mandated creation of the Oversight Council to help ensure PNT got the right amount of leadership attention.” This may have not had the desired effect, though.
“The council is comprised of three undersecretaries, the vice chairman [of the Joint Chiefs of Staff], four combatant commanders, the NSA [National Security Agency] director, DOD’s CIO [chief information officer], and host of other very senior folks. All of whom have way too many other duties. It’s no wonder the department has a hard time getting things done!”
The department’s CIO is the Defense Secretary’s Principal Staff Assistant for PNT. As such, the CIO is tasked with coordinating department-wide efforts. The task is made particularly difficult by the many and diverse players across the department, all of whom have their own authorities, interests and projects.
Proposed systems and capabilities are examined and developed by a variety of DOD organizations. These include laboratories belonging to the five services and the Defense Advanced Research Projects Agency (DARPA).
Programs of Record, which usually lead to acquisition of large systems, are led and managed within the individual services.
A Better Way?
Aside from recommending improved coordination of PNT efforts across the department, GAO has never addressed the way DOD manages its PNT enterprise.
“That is not something we normally get into unless specifically tasked,” said one of the reports’ authors. “We assume departments know best how to lead and manage their efforts.”
Others are not so reticent. They believe the current management structure is incapable of managing the development, acquisition and fielding of the DOD PNT Enterprise with any urgency or efficiency.
“GAO’s focus on the Oversight Council is misplaced,” one retired official asserted. “The missing piece is not oversight, it’s day-to-day DOD-wide management.”
“They need a multi-service program of record for resilient PNT,” the official said. “This would be separate from the GPS program, which would keep its own projects going and feed into the resilient effort. The new resilient PNT program should be managed by a Joint Program Office, which could consolidate integration and acquisition of resilient PNT applications. The office would be the steward for the critical technologies that underpin the modular, open-system integration strategy, including the digital reference architecture, input and output standards, software fusion engines, and needed modeling and simulation tools to ensure NAVWAR compliance.”
Such a construct could provide needed focus and coordination to DOD efforts, address many long-standing congressional concerns, and, by coordinating efforts within DOD and with industry, accelerate progress.
Dana A. Goward is President of the Resilient Navigation and Timing Foundation. He serves on the President’s National Space-based Positioning, Navigation, and Timing Advisory Board.
Jason Poitras (left) and Marc Veinotte of MicroSurvey test a multi-constellation OEM rover with the FieldGenius for Android field controller software. (Photo: Gavin Schrock)
It’s about more than advances in technology — peak times demand peak productivity
Trusty legacy rovers have served surveyors well. Under the right conditions and with proper procedures, a 20-year-old rover might still deliver precisions that could match the latest and greatest.
We’ve become so used to the limitations of legacy gear that we’ve built our workflows, expectations, and job estimates around them. However, in the past few years, the state of GNSS rovers has experienced a sea change, with gains in productivity, the ability to work in mixed environments, ease of use, and increased speed, repeatability and reliability — these developments have come at an opportune time.
Peak Times
Surveying always has been a feast-or-famine prospect; the rises and dips in economics are felt sharply within the profession.
In many places, there is more work than surveyors can accommodate, with competition to recruit and retain enough field personnel to meet demand. It is unclear how long this peak will last. Surveying firms recognize this and do their best to take on as many projects as they can.
Staffing is an acute challenge. Firms have had to dip into incentives beyond the usual pay and benefits packages to attract and retain qualified field personnel. Having the latest gear is a definite plus. Experienced surveyors know much they struggled with legacy gear: GPS-only or GPS + GLONASS only, slow processors, poor multipath performance, and field-data-collector operating systems and software that are obsolete or no longer supported.
Despite the immediate need, it’s generally less desirable to hire people with no surveying experience and train them from scratch. However, newer rovers and field software often do not have the same steep learning curve posed by legacy systems and methods.
Productivity Now
It is hard to say how much of the productivity gains, stated by various manufacturers for their newest systems, will be realized for your specific workflows, but simple testing can give you an idea.
When surveyors try out new rovers, they tend to find themselves so impressed by the first unit tried, they conclude it must be “the best” and eschew due diligence in the selection process. That aside, I believe it is safe to say that there is a near across-the-board productivity improvement with the latest generation of rovers.
Most rovers now provide no-calibration tilt compensation. (Photo: Gavin Schrock)
A Confluence of Factors
We haven’t seen such a sea change in GNSS rover technology in decades; most gains have been incremental. Similar jumps in the past included going from the static-only world to real-time and the first additional constellation beyond GPS.
While the early days of GLONASS were rocky, and most manufacturers were hesitant to productize an unreliable and noisy solution, it did eventually improve. The effect of nearly doubling satellites in view translated to productivity gains. But that was two decades ago.
The recent advent of true, multi-constellation GNSS has had a profound impact on the state of rovers. In 2020, both the Galileo and BeiDou constellations reached a full level of global coverage and signal integration.
Many rovers were already equipped to utilize some (but not all) of the newest satellites and signals. Interface control documents (ICD) for some of the signals have only been released by the constellation providers in the past few years. ICDs provide signal specifics that manufacturers need to integrate them into GNSS solutions.
Some rovers (and base receivers) developed four or more years ago may not be able to take advantage of the full complement of signals. And many did not have the processing power to utilize so many signals from so many satellites in real-time solutions.
By contrast, nearly every new GNSS board released in the past few years has greatly increased processing power, often double that of legacy gear.
Newer rovers are able to work better in sky-view-challenged and multipath hazard-prone places than rovers from only a few short years ago. And it is not just about the total number of channels on a rover datasheet, it is about how many are actually being utilized, how much of that data the processors and real-time kinematic (RTK) engine can handle, and how modernized signals are being leveraged.
Modernized signals are yielding additional advantages. The expected benefits of L5 for the GPS constellation have been widely promoted. L5 was designed to be robust enough for certain safety-of-life applications. The L5 signal is being deployed incrementally to the GPS constellation and should be broadcast from 24 satellites by 2027.
Modern receivers incorporate multi-GNSS signals that can improve performance under tree canopy. (Photo: Gavin Schrock)
I have heard surveyors say they won’t bother upgrading until L5 is complete. But wait — two other constellations already have third-signal capabilities. Indeed, there are 3, 4, 5, even 6 usable signals (in the case of Galileo) already available — modernized, robust signals.
Although L5 will only make this better, you can reap the benefits of signal modernization right now. Some of the innovation put into these modernized signals contributes to reducing certain sources of error. For instance, the Galileo E5a-E5b AltBOC — multiplexing signals in a wide band — is particularly beneficial for dealing with multipath.
Rovers have evolved in other ways besides multi-constellation integration. The decades between these sea changes brought developments such as electronic bubbles, better operating systems, and automation of some functions, but essentially the form factor and functionality of a surveying rover has not changed much. There have been some gadgets and gimmicks along the way, but otherwise rovers had remained pretty much standard in those intervening years.
Real-time precise-point positioning (PPP) has matured to the point that it could be viewed as survey-grade (at least in the horizontal). The delivery of clock, orbit and other data broadcast from geostationary communications satellites (as a service) for PPP means that, for many applications, high-precision positions can be processed by a rover over much of the globe — no base, no radio, no network and no cell phone connection required.
Once research and development removed the lengthy convergence times that plagued legacy PPP, it became commercially viable for many applications. Commercial providers such as Trimble (RTX), Hexagon | Leica (SmartLink), Hemisphere GNSS (Atlas) and others provide subscription services for surveying, construction, agriculture and the growing autonomy market. Most new survey rovers have a PPP option.
Multi-sensor integration, particularly of inertial measurement units (IMU), is becoming standard on new rovers. While there was some value from magnetometer-oriented tilt compensation in the past (though it could be cumbersome and somewhat unreliable), it served as a precursor to modern-day integrated GNSS/IMU no-calibration tilt.
The first no-calibration tilt system hit the market as recently as 2017; now it is hard to find a rover without it. Accessing hard-to-reach points and improved stakeout workflows are some of the benefits of tilt compensation. The development of reliable IMU/GNSS processing was also the key to fully integrating camera-based offset point capture — and soon other sensors such as lidar might be incorporated.
Market Choices
Another set of changes in the high-precision GNSS industry coincided with the above developments, growing a more competitive marketplace. This equates to more choice. The secret sauce of high-precision GNSS is no longer in the hands of the few. The glass floor has been broken, with more rovers than ever available.
Many tiers for choice have emerged.
The Top End. The manufacturers traditionally considered to be the top end continue to innovate and are usually the first to productize developments such as multi-sensor integration and PPP. They continue to lead in integrated surveying solutions, track record, performance, quality, service, support and peer user networks — which continues to appeal to many users. However, they also have second-tier offerings to suit various markets, regions and value propositions.
Whether to Use OEM Devices. For many users, there are compelling reasons to stick with top-end solutions, but there always has been room for other price point options. Until recently, most lesser-known rover brands exclusively integrated GNSS boards from a handful of well-known original equipment manufacturers (OEMs) such as Trimble and NovAtel. Sometimes new developments hit the OEM market quite rapidly — for instance, IMU integration. These third-party manufacturers may add their own touches, but in effect, nearly every rover out there offered a narrow set of DNA — until recently.
Rolling Their Own. Globally, technical universities are graduating GNSS engineers at an unprecedented rate; the prospect of mass applications such as vehicular autonomy and robotics are driving demand. With this expanding pool of engineers, it is now much more practical to develop GNSS solutions from scratch and to fully leverage multiple constellations.
Some third-party manufacturers began working with OEMs but have started developing their own boards and related technologies. I’ve tried several, and performance is, in most cases, as good as that of new boards from traditional sources..
The Rise of Mid-Price Rovers. There are a growing number of breakout rovers from lesser-known brands or rebranded models. These are about half the price of some of the top-end models, yet performance is in most cases nearly par. Some include OEM boards, or the new wave of independent boards.
I’ve seen a sharp rise in the popularity of mid-level rovers among small and mid-sized firms. However, there has not been a corresponding drop in sales of top-end rovers. It seems that surveyors are simply buying more rovers during this peak time.
Receivers-as-a-Service. Another approach for surveying and asset-mapping rovers is pay-as-you-go. This means you do not have to make large up-front investments in hardware. Instead, you pay for high-precision capabilities through subscriptions or tokens when you need it. This can be a good choice for occasional or seasonal users.
One example is Trimble’s Catalyst system. For Catalyst, the hardware investment is an inexpensive antenna, and then you access a subscription service via your mobile field data collector, tablet or smartphone to activate the software-defined receiver (SDR).
Another such model is Flex. With Flex, you have the option to pay full price for the full receiver/antenna to operate as a conventional rover. Alternatively, you can choose to pay a lower up-front price for the rover and use tokens to activate the high-precision capabilities.
Surveyors should put new rovers through their paces before choosing. (Photo: Gavin Schrock)
Low-Priced Rovers. Two external factors have fostered a mini boom in low-cost rovers: R&D for mass markets such as autonomy, and RTK/post-processed kinematic (PPK) solutions for drones, which are often used to reduce the need to set ground control points.
In both segments, inexpensive and often small GNSS boards have been developed. For drone applications where a base was needed for RTK/PPK methods, developers sometimes took the same GNSS board in the drone and packaged it as a base. It did not take long for some of these developers to package the rover for surveying or asset mapping (with geographic information system, or GIS).
While these rovers can perform just as well as top-end or mid-priced rovers in optimal conditions, they may struggle in mixed environments. I’ve tried some, and I can see why every surveyor I’ve asked about performance adds “for the price” to their assessment.
Other developers have taken this a step further, selling a bare-bones rover for less than $1,000, though these can take a lot of tinkering and extra attention to fit into a production workflow. There are even folks creating do-it-yourself rovers. I am not seeing many large firms, who have high-ticket projects and need to conduct integrated surveying, opting for lower priced systems.
We are riding a new wave of GNSS rovers, awash with more choices than ever. In this period of increased demand for surveying services, it might be a great time to upgrade and boost productivity.
New Players
A “roll your own” example is Tersus GNSS, which has designed and manufactured in-house GNSS boards and RTK engines since its inception in 2014. I asked Winston Wen, founder and CEO of Tersus, why they chose this strategy.
“I’m a hardware guy; electronics, computer science, signal processing, etc.,” Wen said. “In 2014, I took a look at the price and portfolios for high-precision, and for equipment for surveyors — the price point looked exceptionally high. From my point of view, it looked like there was room for a new player, and I felt we could do better. There are also growing markets for applications for high-precision GNSS, such as the internet of things (IoT) and autonomy.”
Tersus has experienced solid reception for its products globally. I asked Wen if he felt GNSS for surveying has reached a new level of performance. “Yes, nowadays with 50 satellites, that is huge. Surveyors will be very happy with performance, especially in environments with limited sky view. At this time, there don’t appear to be any new signals announced, so rovers bought today should be top performers to, say, 2025 and beyond.”
Industry Insights
GNSS executives told Gavin Schrock about recent developments in their companies.
Neil Gerein, Senior Director of Marketing,
Autonomy & Positioning Division, Hexagon
As satellite constellations were modernized, GNSS receivers kept pace to offer multi-constellation and multi-frequency capabilities to culminate in the latest technologies in PPP corrections.
For example, Hexagon’s RTK From the Sky technology is able to achieve highly available corrections with centimeter-level accuracy globally. However, modern GNSS receivers also offer other benefits, such as interference mitigation and spoofing detection for improved positioning robustness, multipath mitigation, and more powerful sensor fusion.
Miles Ware, Vice President,
Marketing & Global Customer Care, Hemisphere GNSS
Much like the constantly evolving world of smartphones, tablets, and computers, the improvements in multi-constellation GNSS receiver performance have been significant, even over just the past few years.
Many legacy rovers, bases and reference stations that are older than four years cannot track some of the newest signals, such as from BeiDou Phase 3 satellites. This means some of the highest performing signals available are now accessible to many users. As fewer BeiDou Phase 2 satellites continue to transmit, many legacy receivers will no longer have the performance they once did.
With upcoming services such as OSNMA (the Galileo GNSS data authentication service) and global PPP signals, many receivers from a few years ago do not have the CPU capacity to employ them. Today’s GNSS engines track more satellites, more signals per satellite, and have more CPU to perform advanced operations, all while consuming the same or less power than previous generations.
Francois Martin, Vice General Manager,
CHC Navigation
The latest GNSS RTK rover technology evolutions are based on the maturity and enhancement of satellite navigation systems, as well as the integration of IMU sensors into the receivers.
The most recent generation of our GNSS rovers, such as the CHCNAV i83, is based on the sophisticated iStar algorithm that significantly improves the efficiency of GNSS satellite signals tracking for unmatched performance in GPS, GLONASS, BeiDou, Galileo and QZSS constellations, utilizing all available frequencies, including BeiDou 3.
Moreover, the fusion of GNSS and IMU technologies enables centimeter-level positioning, maintains fixed and reliable RTK accuracy, and collects points faster than ever before, even in challenging conditions. GNSS survey productivity is increased by up to 30%, and the user base expands from experienced users to new users such as construction site foremen.
Gavin Schrock, PLS, is a practicing land surveyor, the operator of a cooperative real-time GNSS network in Washington state, and a technology writer.
In a world where GPS and other GNSS signals can be easily denied or, worse, spoofed, interest in other forms of navigation has rebounded.
Imagine being able to locate yourself within a couple of centimeters with just your cellphone – deep underground. Or inside a metal structure. Or underwater (assuming you can keep your equipment dry).
No satellite signals, no Wi-Fi ranging, no inertial system. Just the ambient magnetic flux that constantly surrounds us all. Everywhere.
Animals have used the Earth’s magnetic field to find their way for millions of years. People have been using magnetic compasses for over a thousand. Until the advent of GPS, magnetic compasses were foundational tools for aircraft and ship navigation, especially when out of sight of easily recognized landmarks.
Then GPS came along, and almost everyone’s eyes turned to space.
But in a world where GPS and other GNSS signals can be easily denied or, worse, spoofed, interest in other forms of navigation has rebounded. And because GPS helped demonstrate the efficiencies geospatial services provide, users also want those services to be more resilient and to work in places signals from space just can’t reach.
According to Neill, “Our solution builds upon inexpensive magnetometers, smartphones, machine learning, edge computing, and some incredibly complex math to convert raw magnetic data into a source of ultra-precise location data. These relatively recent tech developments allow us to bring things together for a major update to a centuries-old way of navigation and positioning.”
Describing AstraNav as a software tech company, Neill said that the company’s system is “hardware agnostic.” It can work on “just about anything that has a magnetometer. No additional hardware or external connectivity is required, and we can run on any existing operating system.”
The company has partners in retail, automotive and telecom validating the technology. They have also been working with a U.S. Department of Defense (DOD) combatant commander to demonstrate the product, as well as Virginia Tech and its National Security Institute (VTNSI.) “This is not a case of ‘here’s an idea that we hope will materialize,” said Neill. Describing two real-world trials and use cases to the board, he said, “This technology is a reality, and we’re doing it.”
Most previous magnetic navigation efforts relied upon relatively low-resolution maps. An airplane could find its way safely across the ocean using the maps that were available and likely end up within a mile or two of an airport. Much higher resolution maps built through surveys and artificial intelligence are critical to AstraNav’s centimeter-level accuracy with systems that continue to learn on their own.
Intellectual property is AstraNav’s biggest asset. “We have multiple patents filed and pending,” said Neill. “Our IP is what allows us to sense and analyze magnetic fields so finely, develop maps, and make use of very low-cost magnetometers, such as the ones in cell phones.”
Several people at the advisory board presentation expressed surprise that they had not heard of the company and this capability before. “We have been busy getting established as a company, supporting our first commercial clients, and doing demonstrations for various folks within DOD,” Neill explained. “This presentation is by way of our coming out party. We are very eager to become better known and are looking forward to explaining our capabilities one-on-one with potential users.”
Citing an abundance of proprietary material, Neill was unwilling to discuss a lot of technical detail at the public meeting. His short presentation, he said, was to raise awareness and stimulate interest.
The number of those in attendance who after the presentation said they were eager to learn more showed that he was successful.
Dana A. Goward is President of the Resilient Navigation and Timing Foundation