The GPS Directorate has approved a change to the Navstar GPS Control Segment to User Support Community Interfaces ICD-GPS-240 and ICD-GPS-870, reports the U.S. Coast Guard Navigation Center.
The change removes the GPS satellite plane/slot and clock information from the Operational Advisory message. SVN/PRN, block type and NANU details will continue to be included.
The change proposal was approved by the GPS Interface Control Working Group in December 2018.
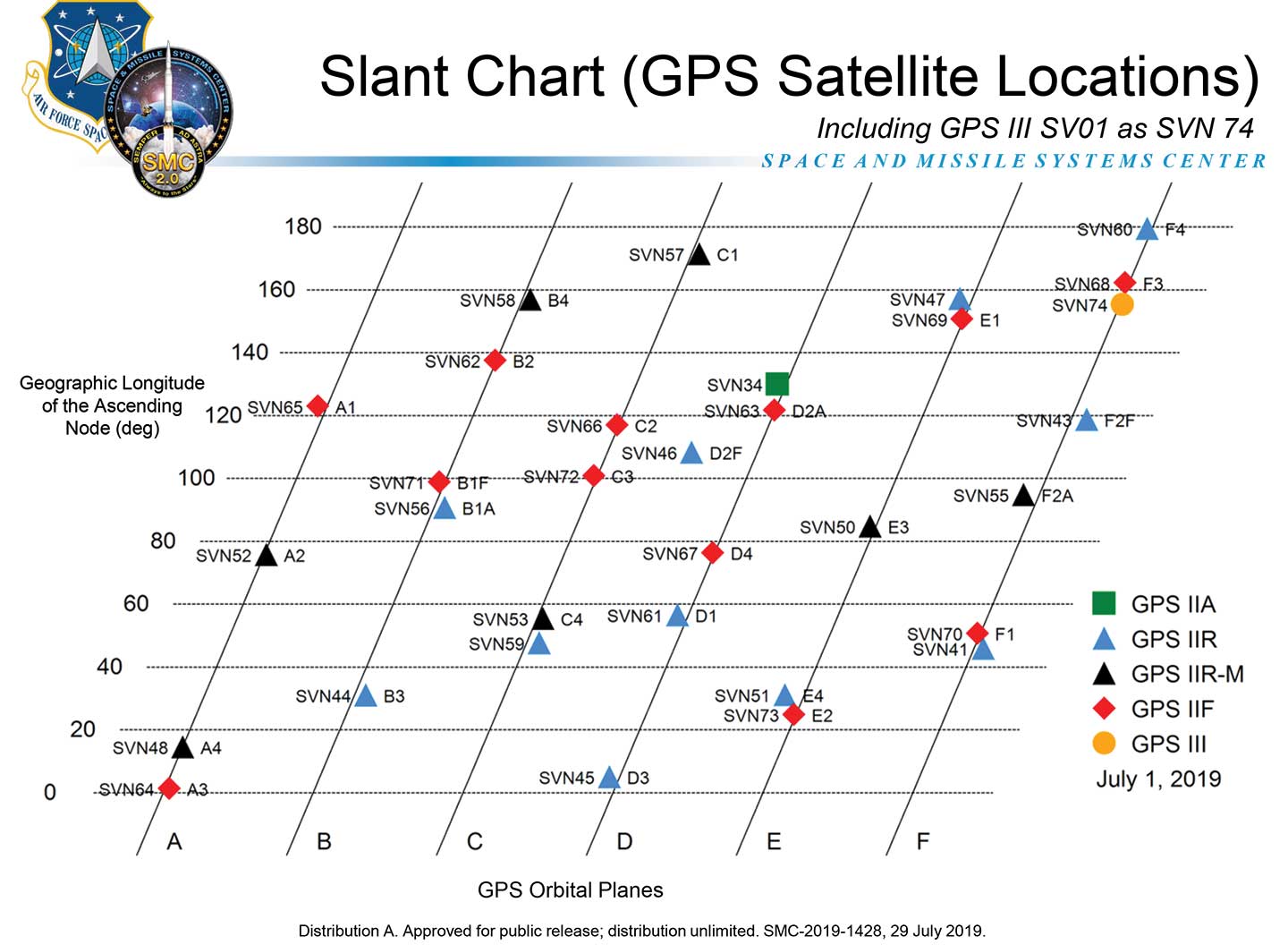
A depiction of the GPS constellation of satellites with slot and plane designations has been published by the U.S. Coast Guard Navigation Center as an easy-to-read graphic for use by the GPS user community.
Chart: NAVCEN
The chart can be found on the NAVCEN Constellation Status page and will be updated with the commissioning of new GPS satellites or upon any change in the constellation.
Safely integrating autonomous drones into global airspace is the goal of Altitude Angel.
The company has completed its involvement in the Gulf of Finland (GOF) U-Space project, declaring the trials to have been a “huge success” and an “amazing showcase” of its unmanned traffic management (UTM) technologies.
The GOF U-space demonstrations are funded by the SESAR Joint Undertaking for European sky air traffic management research.
In July and August, advanced drone operational demonstrations took place across Estonia and Finland, showcasing use cases that involved both manned and unmanned aircraft in shared airspace. The demonstrations relied on systems such as Altitude Angel’s GuardianUTM O/S to remain safe.
GuardianUTM, the company’s core system, is already helping drones operate in controlled airspace. It powers the UK’s national UTM system, operated by NATS, the UK’s main air navigation service provider.
Altitude Angel was a key UTM partner for the trials, providing services that included integration to the FIMS (flight information management system) for the transport of flight plans, telemetry/position reports, AIM (geofencing/volume reservations), as well as alerts and registration data to-and-from the drone operators and manned aviation which were involved in the trials.
Altitude Angel was able to demonstrate its UTM platform across a number of scenarios that varied in scope and range, and included:
urban drone fleet operations with police intervention,
long-distance multisensory inspection flights over forests,
urban drone operations in controlled airspace,
powerline inspection in rural areas, maritime search and rescue, and
international parcel delivery.
The demonstration series concluded with an urban Volocopter air taxi flight around Vantaa International Airport, Helsinki.
“We’ve been working with the SESAR team for over a year on this project. It’s been a great few months in Finland and Estonia supporting the live demonstrations which have been huge success and an amazing showcase of our world-leading UTM technologies,” said Simon Wynn-Mackenzie, Altitude Angel’s head of products.
“Not only did the scenarios give us another opportunity to demonstrate our production UTM platform in another real-life environment, they went a long way to showing the public how drones can be used in a positive and socially beneficial way on a daily basis,” Wynn-Mackenzie said.
“Our only disappointment was that we were not able to demonstrate our world-first Conflict Resolution Service which we unveiled in July, as the trial scenarios had already been agreed. However, we’ll be looking to showcase our constantly evolving platform and several new services very soon,” he said.
Other UTM demonstrations. In November 2018, Altitude Angel led the team behind Operation Zenith, which gave a view of the future of air traffic management and drone integration into busy, complex airspace, demonstrating how by using the right technology, it’s possible to safely integrate unmanned traffic into controlled airspace and open the skies to commercial airspace worldwide.
The U-space initiative. The GOF U-space project, with a broad consortium of 19 members, demonstrates Europe is on course with its implementation of U-space, an initiative that aims to ensure safe and secure drone traffic management, taking into account the rapid growth in the use of drones.
The GOF concept enables shared situational awareness for all aviation stakeholders. The success of the project is based on deep air traffic management experience of all consortium members, including three world-leading UTM technology vendors and two air navigation services providers, developing interoperability and data-sharing solutions that are aligned with SESAR’s overall U-space architecture.
The U-Space project has received funding from the SESAR Joint Undertaking under the European Union’s Connection Europe Facility (CEF) programme under grant agreement SJU/LC/343-CTR.
u-blox’s Bluetooth low-energy module NINA-B1 has been chosen by AddMobile, Swedish provider of devices and services for construction site management, as the basis of its short-range equipment-tracking beacons, AddTrackers.
Photo: AddMobile
In addition to NINA-B1, the AddMobile Toolbox features the u-blox MAX-M8 GNSS module and the u-blox GSM/GPRS cellular module SARA-G3.
AddTrackers is among the latest enhancements to the company’s AddMobile Toolbox platform and involves adding radio beacons to any tools or equipment that need tracking.
The AddMobile Toolbox helps site managers control mobile work orders, log fleet vehicle mileages, secure entry to work sites, register staff as they come and go, as well as handling fleet management and equipment safety.
It uses a variety of hardware to enable these Connected Construction Site’s services, including stationary hubs and entrance control units with Bluetooth low-energy and cellular connectivity, as well as an RFID reader, and mobile hubs with GNSS, Bluetooth low energy and cellular connectivity.
“The AddTracker beacons and hubs rely upon a combination of GNSS positioning, cellular connectivity, and Bluetooth low energy short-range radio interfaces,” said Bo Lyvall, business development manager at AddMobile. “U-blox was able to provide all three key technologies for our solutions, as well as providing great local support in the Malmö area.”
In use, the beacons equipping tools and equipment communicate with suitably equipped smartphones or other AddMobile hardware infrastructure. When one of these devices picks up an asset’s signal, the asset’s unique ID and GNSS coordinates are sent to AddMobile’s cloud platform, which can then show managers an image of the asset and its position on a map, list the equipment’s features, and show where it is on its planned maintenance schedule.
Trackers don’t have to be static. In one use case, a vehicle is fitted with a mobile hub that includes a GSM connection, GNSS positioning, and a Bluetooth low energy interface in the luggage area.
Tools can be tracked on-site by static hubs, and then followed as they are put into company vans for use offsite. This means that staff scheduling offsite jobs can know the location of all their mobile personnel, and whether they have the right tools with them to undertake each task.
The company was also attracted by the cost efficiency of u-blox’s offering, and what is already a vast installed base of interoperable Bluetooth low energy technology. In the future, the collaboration between AddMobile and u-blox may extend to the use of a longer-range variant of Bluetooth, to further reduce the cost of asset tracking on large and complex sites, and exploring the appropriate use of cellular technology in asset tracking.
CHC Navigation has launched a new website to convey its expanding role as a provider of geospatial and GNSS products and solutions.
“Our new website provides a clear insight of who we are and where our ambition lies when developing, delivering and supporting high-end, professional and innovative GNSS-based solutions to our customers,” the company stated in a press release. “The website offers extensive refreshed and updated resources presenting the entire scope of CHCNAV solutions to make any surveying work more effective.”
In commenting on the new website, George Zhao, CEO of CHC Navigation said, “We have been enjoying double-digit growth for over 16 years demonstrating the strength of CHC Navigation in the professional GNSS-based markets. Our new website brings a comprehensive vision of our technology and innovation, expanding compelling solutions and our global customer care approach.”
Founded in 2003 and based in Shanghai, China, CHC Navigation creates GNSS navigation and positioning solutions.
Higher rate, higher acceleration applications benefit from SWaP-C advantages of MEMS-based inertial systems.
Gladiator Technologies’ LandMark 007 inertial measurement unit (IMU) combines low noise, high range sensors and Velox high-speed output in a rugged IMU package measuring 0.7 inches square. With rate ranges up to 2000°/s and acceleration ranges as high as 200 g, the LandMark 007 IMU provides demanding, precision performance for a range of high dynamic, rugged applications.
Photo: Gladiator Technologies
All LandMark 007 IMUs feature Velox high-speed message timing to minimize digital message phase lag. They also include high-speed output data rates (up to 10 kHz) for measurement accuracy and flexibility.
These high-speed features are complemented by low-noise gyros with a gyro angle random walk (ARW) of <0.0035°/s/√Hz (0.15°/√hr) and low-noise accelerometers with a velocity random walk (VRW) of <6 mg/√Hz.
“The LandMark 007 IMU is uniquely designed to meet the industry’s need for a compact, rugged and high performance, cost-effective IMU. Extensive conditioning and testing ensure reliable, stable measurements for our customers with high dynamic applications,” said Eric Yates, Gladiator Technologies’ sales manager. “We are seeing strong interest in the LandMark 007 and LandMark 007X IMUs from applications which otherwise have been limited to highly specialized, and therefore expensive, IMU solutions.”
IMUs with less than or equal to 98 g linear acceleration range are designated as LandMark 007 IMUs. IMUs with greater than 98g linear acceleration range are designated as LandMark 007X IMUs. The LandMark 007 IMU is exported categorized as ECCN7A994 and the LandMark 007X is export categorized as ECCN7A103.
A LandMark 007 IMU development kit is available for set-up, configuration and data collection.
A new case study focuses on improving the endurance and navigational precision of underwater autonomous systems.
Sonardyne, designer and manufacturer of underwater positioning and inertial navigation, describes the challenges to increase navigation capability for subsea monitoring and inspections. Sonardyne joined the National Oceanography Centre (NOC) and L3Harris ASV on a two-year project to develop new positioning technologies to extend the limits of AUVs and UUVs.
The project — Precise Positioning for Persistent AUVs (P3AUV) — is supported with £1.4 million in funding through Innovate UK’s research and development competition for robotics and artificial intelligence in extreme and challenging environments.
Sending autonomous and unmanned underwater vehicles (AUV, also known as UUVs) out on missions that will last for days or weeks, unaided by vessels or other supporting offshore infrastructure, is a major goal for the ocean science, offshore energy and defense sectors.
Photo: Sonardyne
Sustained Ocean Observation. The research community aims for sustained ocean observation without the need for ship support, especially in ice-covered polar areas. Long-duration navigational capability is also a key enabler for persistent covert surveillance operations in the defence sector. And emerging applications include resident seabed-based systems, deep-sea mining, aquaculture and UXO surveys for renewable installations.
Autonomous AUVs would remove the need for a surface vessel, reduce risk to personnel, and reduce costs. Users could survey more seabed for longer and with fewer or even no people offshore.
The team is developing ways to provide greater positioning accuracy for long-endurance operations in deep water, while also reducing power requirements. The team will also be increasing the use of autonomy to make long baseline (LBL) positioning transponder box-in faster and easier, with onboard data processing and calibration.
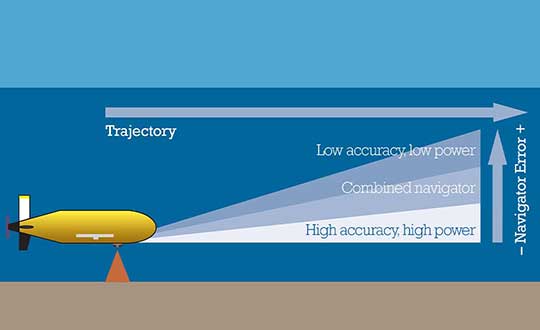
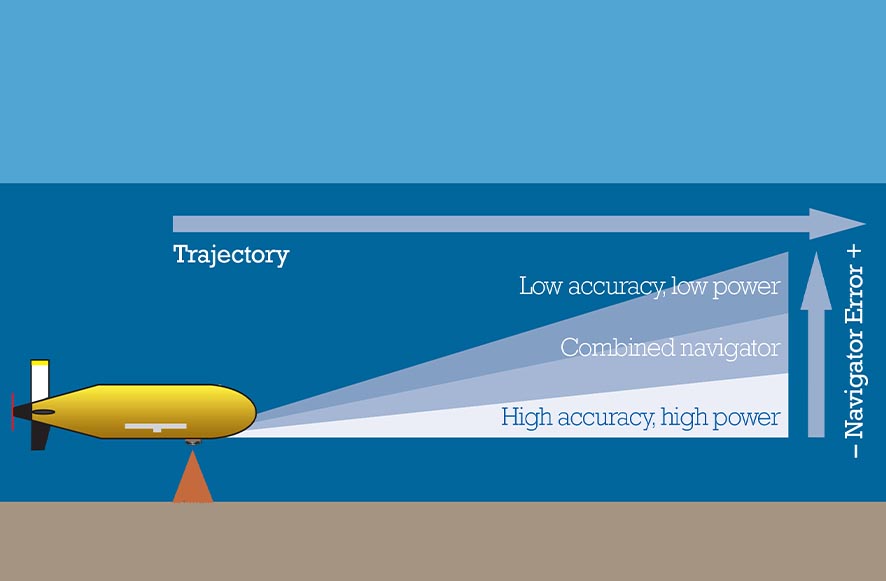
High-power INS input. Central to this work is the AUV’s acoustic and inertial navigation system (INS). Low-power sensors have much lower navigation accuracy and often have to surface to correct positioning error with a GPS fix. The team seeks to integrate low- and high-power sensors to achieve high performance at much lower power consumption.
For instance, the NOC’s Autosub Long Range (ALR) uses a low-power microelectronic mechanical system (MEMS) supported by separate Doppler velocity log (DVL) and ADCP input to calculate how far it has traveled on missions, which can be several months long. To increase the ALR’s positioning accuracy over longer distances, the team is using the Sonardyne SPRINT-Nav all-in-one subsea navigation instrument alongside MEMS technology to work towards high-precision solutions that save space and power.
Image: Sonardyne
Accuracy during ascent and descent. The project also involves improving positioning accuracy when subsea vehicles transition through the water column. This is a notoriously difficult area for AUV deployments, because it relies on the Doppler velocity log (DVL) being able to lock on to the seafloor (bottom lock), so that vehicle XYZ velocities can be calculated, supported by pressure data.
However, DVLs are range limited, so there is often a period where the DVL is out of range. When there are thousands of meters of water between the surface and the seabed, this can introduce significant positioning uncertainty.
By using the acoustic Doppler current profiler (ADCP) capability in Sonardyne’s SPRINT-Nav INS instrument (looking down) and a second Syrinx DVL (looking up), the team could then build up a layer-by-layer profile of the water column velocities to be used as tracking layers.
The objective is to reduce positioning errors significantly during both the dive and surfacing phases of an operation. Results depend on the variability of the current in any given area.
The data collected during the descent and surfacing phases can be processed to provide a full ocean-depth current profile — collection of which is required for many offshore energy projects and can be valuable for ocean research.
Hyperspectral imagery of U.S. East Coast. (Image: NOAA)
Raytheon will build the Geostationary Littoral Imaging and Monitoring Radiometer (GLIMR) sensor under a contract from the University of New Hampshire. GLIMR, NASA’s selected Earth Venture Instrument-5 investigation, will be NASA’s first hyperspectral imager in geostationary (GEO) orbit.
Hyperspectral imaging collects and processes information from across the electromagnetic spectrum including visible light, infrared and ultraviolet frequencies to create a highly detailed view of physical and biological conditions in coastal waters.
The instrument will provide high-sensitivity, high-spatial and high-temporal resolution measurements of coastal and ocean ecosystems in the Gulf of Mexico, parts of the southeastern U.S. coastline and the Amazon River plume.
Decision-makers will use the GLIMR data to respond rapidly to natural and manmade coastal water disasters, such as harmful algae blooms and oil spills. It will also help improve the coastal ecosystem’s sustainability and resource management.
“GLIMR will collect the sharpest and most colorful view of physical and biological conditions in coastal waters ever seen from GEO,” said Jeff Puschell, GLIMR instrument scientist and principal engineering fellow at Raytheon Space Systems. “A hyperspectral imager is essential technology to capture new insight about our changing coastal ecosystems.”
The University of New Hampshire is NASA’s lead organization for the GLIMR contract. The instrument will launch aboard its host spacecraft in the 2026-2027 timeframe. Its data will be available to scientists, researchers and educators around the world.
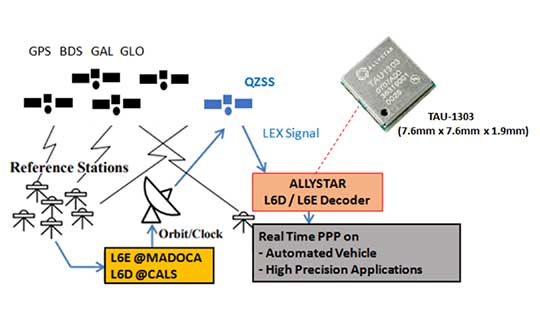
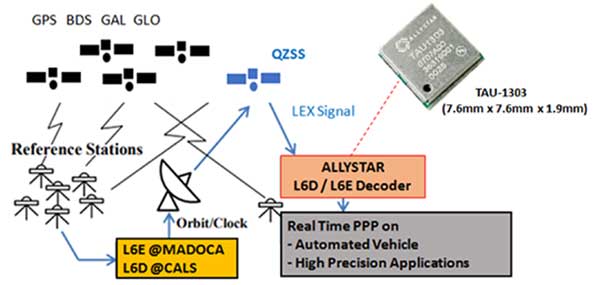
Allystar Technology Co. has launched its QZSS L6 decoder technology in module TAU-1303, which supports tracking the QZSS signals L6D (CLAS) and L6E (MADOCA).
The Quasi-Zenith Satellite System (QZSS) satellite positioning system is operated by Japan as complementary to and an augmentation for GPS. The four satellites in the system broadcast the L6 signal, including L6D and L6E.
CLAS — the Centimeter-Level Augmentation Service — is provided through the L6(D1) signal, and the experimental augmentation service with MADOCA (Multi-GNSS Advanced Demonstration tool for Orbit and Clock Analysis) is provided through L6(D2) signal.
For QZSS, which will be fully operational in the future, Allystar’s latest solution can decode the corrections data broadcast from L6D and L6E signals, and assist developers in applying the centimeter-level accuracy by PPP-RTK algorithm with the correction data, according to Justin Yang, Allystar product manager.
Within its 7.6 x 7.6-millimeter tiny size, the TAU-1303 module provides six dedicated tracking channels to support tracking L6D and L6E at the same time.
For professional applications, the TAU1303 comes with built-in support for standard RTCM Protocol (MSM) and Proprietary Protocol, supporting 2,000 bits per second QZSS L6 raw data output directly for third-party integration and application.
CLAS on L6D channel provides the following error corrections: satellite clock, orbit, code bias, phase bias ionospheric delay and tropospheric delay. MADOCA on L6E channel provides the following error corrections: satellite clock, orbit, code bias and phase bias.
Allystar TAU-1303 offers superior performance thanks to an on-board 26-MHz temperature-compensated crystal oscillator (TCXO) and a reduced time to first fix because of its dedicated 32-KHz real-time clock oscillator. Based on 40-nanometer manufacturing processes of the Cynosure III GNSS chipset, the TAU-1303 has very low power consumption of less than 40 mA at 3.3V.
Engineering samples are available.
How Allystar’s QZSS L6 Decoder TAU1303 operates. (Diagram: Allystar)
China’s super-thin rubidium atomic clock, which is just 17 millimeters thick, has been put into mass production, according to Xinhua News Agency.
The clock, developed in 2018 by a research institute under the China Aerospace Science and Industry Corp. Ltd, (CASIC) is the key to the positioning and timing accuracy of BeiDou navigation satellites.
In 2015, Chinese scientists developed a rubidium clock that is tiny enough to fit in the palm of your hand but was almost 40 millimeters thick. The new clock, with a length of 76 millimeters and width of 76 millimeters, is only 17 millimeters thick.
Compared with the previous generation, the new clock is smaller in size but performs better. It adopts a plug-in design, making it easy to insert and remove on circuit board. With stronger resistance to high temperatures, it can work at 70 degrees Celsius (158 degrees Fahrenheit).
In addition, it has a taming function, enabling the clock to be automatically recognized and tamed by the pulse per second (PPS) signal provided by navigation satellite systems, improving the accuracy of local frequency.
The clock can be used in fields such as aviation, aerospace and telecommunications. According to its developers, the ultra-accurate clock will have a broader market prospect in the future.
Atomic clocks are the most accurate time and frequency standards. They use vibrations of atoms to measure time. Due to its small size, low cost and high reliability, rubidium clock is the most widely produced atomic clock.
A large number of self-developed rubidium and hydrogen atomic clocks have been carried by satellites that provide accurate positioning for China’s BeiDou Navigation Satellite System.
The atomic clocks are the workhorses that send synchronized signals so sat-nav receivers can triangulate their position on Earth.
China began to construct the BDS in the 1990s. The system started serving China with its BDS-1 satellites in 2000 and started serving the Asia-Pacific region with its BDS-2 satellites in 2012. China will complete the BDS global network by 2020.
A ULA Delta IV rocket carrying GPS III SV02 lifts off from Space Launch Complex-37 on Aug. 22. (Photo: ULA)
The U.S. Air Force’s second next-generation GPS III satellite, built by Lockheed Martin, is responding to commands, under control and now using its own internal propulsion system to get to orbit following its successful Aug. 22 launch.
At 11:01 a.m. ET, Air Force and Lockheed Martin engineers at Lockheed Martin’s Launch & Checkout Facility near Denver declared they had full control of GPS III Space Vehicle 02 shortly after the satellite’s separation from its United Launch Alliance (ULA) Delta IV rocket booster. The satellite, nicknamed “Magellan” by the Air Force, began its rocket ride to space with a 09:06 a.m. ET launch from Cape Canaveral Air Force Station.
GPS III SV02 is now climbing towards its operational orbit about 12,550 miles above the earth under the power of its own Liquid Apogee engines. Engineers at Lockheed Martin Space’s Waterton, Colorado facility are commanding the satellite using elements of the GPS Next Generation Operational Control System (OCX) Block 0.
“GPS III SV02 is receiving and responding to commands just as planned. In the days ahead, we’ll finish orbit raising to our operational slot and then send the satellite commands telling it to deploy its solar arrays and antennas,” said Johnathon Caldwell, Lockheed Martin Space’s Vice President for Navigation Systems. “Once we are set up, we’ll begin on-orbit checkout and tests, including extensive signals testing with our advanced navigation payload.”
The payload is provided by L3Harris. The first GPS III satellite launched in December 2018 and its navigation payload has performed beyond expectations on-orbit during pre-operational testing, according to L3Harris.
GPS III SV02 is the second GPS III satellite designed and built by Lockheed Martin to help the Air Force modernize today’s Global Positioning System (GPS) constellation with new technology and capabilities. GPS III satellites provide 3x greater accuracy and up to 8x improved anti-jamming capabilities. GPS III also provides a new L1C civil signal, compatible with other international global navigation satellite systems, like Europe’s Galileo.
The First GPS III Satellite Completes On-Orbit Testing
Image: ULA
GPS III SV02 will be the second GPS III satellite in orbit and the second GPS III satellite now being commanded from Lockheed Martin Space’s facility.
On Dec. 23, 2018, the Air Force launched the first GPS III satellite. Nicknamed “Vespucci,” GPS III SV01 underwent months of checkout and thorough testing of its advanced, new navigation payload provided by Harris Corporation.
“GPS III SV01’s performance exceeded expectations during testing,” Caldwell said. “On July 12, we officially completed all On Orbit Check Out & Test activities. We are excited to see this satellite move to the next phase and perform in an operational environment.”
That’s expected to happen later this year once the first satellite is handed over to the Air Force.
Thinking Ahead From the Ground Up
In preparation for this handover, in 2016, the Air Force awarded Lockheed Martin the GPS III Contingency Operations (COps) contract to upgrade its current GPS ground control system – the Operational Control Segment (OCS) – to be able to fly today’s 31-satellite constellation, as well as the new, more-powerful GPS III satellites, until OCX Block 1, still in development, is delivered.
Lockheed Martin delivered the GPS III COps software upgrade in May and it is currently undergoing preparations for installation.
COps is the latest GPS ground control upgrade project Lockheed Martin has had since it began sustaining the OCS in 2013. In November 2018, the company completed the AEP 7.5 upgrade — the largest architectural change in the system’s history — replacing significant code, hardware and software to improve the system’s cybersecurity capabilities and positioning the Air Force to better operate in contested, degraded and operationally limited environments.
In December 2018, the Air Force awarded Lockheed Martin the GPS Control Segment Sustainment II (GCS II) contract to continue to further modernize and sustain the OCS through 2025.
In 2020, the OCS is expected to receive the M-Code Early Use (MCEU) upgrade, which will allow control of M-Code, an advanced, new signal designed to improve anti-jamming and anti-spoofing, as well as to increase secure access to military GPS signals for U.S. and allied armed forces.
With GPS III SV01 and SV02 now on orbit, GPS III satellites continue to roll off the production line at Lockheed Martin’s advanced $128-million GPS III Processing Facility near Denver. On May 27, the Air Force declared the GPS III SV03 Available for Launch (AFL) and had the company place it into storage waiting for a launch date. GPS III SV04-08 are now in various stages of assembly and test.
In all, Lockheed Martin is under contract to build up to 32 next-generation GPS III/IIIF satellites for the Air Force. Additional IIIF capabilities will begin being added at the 11th satellite. These will include a fully digital navigation payload, a Regional Military Protection capability, an accuracy-enhancing laser retroreflector array, and a Search & Rescue payload.
The Harris-supplied navigation payload before integration into the second GPS III SV. (Photo: L3Harris)
As the U.S. Air Force prepares to launch its second next-generation GPS III satellite, L3Harris Technologies delivered its eighth navigation payload to GPS III satellite prime contractor Lockheed Martin.
The first GPS III satellite launched in December 2018 and its navigation payload has performed beyond expectations on-orbit during pre-operational testing, L3Harris said in a press release.
In May, the Air Force declared the third GPS III satellite Available for Launch, pending a launch date. L3Harris payloads are also already fully integrated in the GPS III 4-6 space vehicles currently in production and testing at Lockheed Martin.
The GPS III navigation payload features a mission data unit (MDU) with a unique 70-percent digital design that links atomic clocks, radiation-hardened processors and powerful transmitters — enabling signals three times more accurate than those on current GPS satellites. The payload also boosts signal power, which increases jamming resistance by eight times and helps extend the satellite’s lifespan.
In 2017, L3Harris announced that it completed development of an even more-powerful, fully digital MDU for the Air Force’s GPS III Follow On (GPS IIIF) program. The new GPS IIIF payload design will further enhance the satellite’s capabilities and performance.
In September 2018, the U.S. Air Force selected Lockheed Martin for a fixed-price-type production contract for up to 22 GPS IIIF satellites. L3Harris is Lockheed Martin’s navigation signal partner for GPS IIIF satellites, and in January received a $243 million award to provide the navigation signals for the first two GPS IIIF satellites, space vehicles 11 and 12.
L3Harris’ expertise in creating and sending GPS signals extends back to the mid-1970s — providing navigation technology for every U.S. GPS satellite ever launched. While the Air Force originally developed GPS for warfighters, millions of people around the world and billions of dollars of commerce now depend on the accurate, reliable signal created and sent by L3Harris navigation technology.
The FALCon research project has already carried out initial flight experiments with unmanned small aircraft. (Photo: German Aerospace Center)
The parachute safety solution manufacturer Drone Rescue Systems GmbH is supporting the European research project FALCon, the “Formation flight for in-Air Launcher 1st stage Capturing demonstration.”
Under the leadership of the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR), research is being conducted on how launch vehicles can be returned to the launch site as efficiently as possible for re-use.
The aim of FALCon is to achieve cost-efficient and environmentally friendly satellite transport. The focus of the project lies on the return of rocket stages after launch. To be able to reuse these stages, efforts are being made to recapture them in the air using a “rocket catcher.”
For the next three years (March 2019 to February 2022) the focus will be on the development and flight demonstration of a technical solution for this idea. While still in the air, rocket stages are to be captured by a transport aircraft over the sea and pulled into the vicinity of the landing site. There, the stages are to land independently.
“We are proud to be part of the FALCon research project together with five international partners and DLR as part of HORIZON2020 (EC grant 821953), the EU’s largest research and innovation program to date. The capture and towing of rocket stages in flight, that is, an autonomous and safe landing, is a particularly interesting topic for us as a manufacturer of parachute safety solutions,” said Andreas Ploier, CEO of Drone Rescue Systems GmbH.
The research project has already carried out initial flight experiments with unmanned small aircraft.