The Visual Navigation System improves navigation in GNSS-denied environments by means of visual odometry techniques
Photo: UAV Navigation
UAV Navigation has released its new Visual Navigation System (VNS), a new capability for manufacturers and end users of NATO Category I and II unmanned aerial systems (UAS).
The compact and lightweight device — provided as an optional peripheral to the main flight control system — enables the safe and efficient navigation of UAVs in GNSS-denied environments. The VNS combines visual odometry techniques and pattern identification with the rest of the sensors onboard the aircraft to ensure that the absolute position, orientation and relative movement of the aircraft over the ground is calculated with extremely high accuracy.
The planning and execution of UAV missions in environments in which the GNSS signal is either unavailable or unreliable is becoming more critical. For some missions, the datalink to the ground control station may be subject to interference, or the operation dictates that the flight must be performed without a datalink from the outset.
Under these circumstances, UAS traditionally rely on an inertial navigation system (INS) to complete the mission. However, all such inertial systems accumulate navigational drift due to sensor noise, propagation models and the difficulty in characterizing external forces. This positional error limits any such UAS operation because an accurate position cannot be guaranteed.
The new VNS, combined with the company’s Vector range of flight control systems, effectively addresses this problem by using data independent from GNSS and more accurate than INS. The system identifies patterns in the terrain below to assist in canceling out any accumulated error, allowing the UAS to operate for long periods without losing positional precision.
Because of its reduced size and weight, the VNS can be installed in Category I and II UAS, enabling them to take advantage of this navigation technique without penalizing autonomy or payload capacity.
The new VNS — developed entirely by the Spanish company UAV Navigation, part of the Oesía Group — has produced outstanding results during flight testing, both on fixed-wing platforms (typically with higher airspeeds and greater service ceilings) and rotary-wing platforms (where high vibrations and hover maneuvers are typically a problem). The new VNS has proved its ability to provide accurate navigation information for flights where there may be an intermittent loss of GNSS signal, and also when a flight must be executed from the outset without GNSS data.
Partnership will test future eVTOL flight routes and concept of operations in the Kansai region
Photo: Airbus
Airbus is partnering with Japanese helicopter operator Hiratagakuen to develop advanced air mobility services in the Kansai region and beyond. Through this agreement, the companies will tackle crucial aspects required to launch a commercial transportation service with CityAirbus NextGen.
As a first step, the partners’ joint project to organize a simulation of ideal routes, concepts of operations, and necessary equipment for safe electric vertical takeoff and landing vehicle (eVTOL) flights in the Kansai region. Kansai was selected by the Osaka prefecture for the project. A demonstration flight is scheduled for later this year.
With the aim to implement air mobility services beyond urban environments, the joint work of Airbus and Hiratagakuen will support the development of advanced air mobility solutions with CityAirbus NextGen for use cases ranging from air medical services to commercial air transport and ecotourism in a variety of operational contexts.
Airbus and Hiratagakuen will use an H135 helicopter to test advanced navigation and communication technologies for safe operations of eVTOLs in urban environments, while simulating CityAirbus NextGen’s flight configuration.
Hiratagakuen is a Kansai-based helicopter operator that specializes in helicopter emergency medical services (HEMS), transportation of personnel, flight training and maintenance. The company’s fleet includes 14 H135 and two H145 helicopters.
In September 2021, Airbus unveiled its eVTOL prototype CityAirbus NextGen to explore advanced air mobility technologies. The company plans to construct a dedicated center to test the aircraft’s systems in the lead-up to its maiden flight. Airbus is also working closely with industrial and institutional partners to lead the development of urban air mobility ecosystems, including ITA Airways in Italy and launch of the Air Mobility Initiative in Germany.
Helix Geospace will participate in the “Future flights challenge phase 3” project by Innovate UK involving drone swarms. The project aims to demonstrate how large unmanned systems can be used to solve environmental-protection concerns in GNSS-denied environments, functioning in swarms and utilizing a combination of digital twinning, computer vision and real-world flight testing.
The goal of the project is to prove that a single remote operator and local safety pilot can handle many unmanned devices and maintain continuous communication in GNSS-denied environments.
Commercially available antennas are susceptible to jamming and spoofing. DielectriX antennas from Helix Geospace are built into a sophisticated array system that can detect all jamming and spoofing events, pinpoint their precise source, and then eliminate their impact, maintaining the accuracy and resilience of GNSS positioning, navigation and timing in GNSS-denied environments.
Collaboration with NERC British Antarctic Survey and Lancashire fire and rescue will provide proof of exploitation and public engagement for the project. The Windracers aircraft will be equipped with British Antarctic Survey scientific research equipment and flown in the Antarctica region to gather novel research data, previously not achieved before at this scale.
The collaboration with Lancashire fire and rescue will help develop a solution for early fire detection and mitigation. The Windracers aircraft will be retrofitted with sensors and fire mitigation technology providing an airborne system that will patrol high-risk areas.
The U.S. Department of Transportation’s Federal Aviation Administration (FAA) has awarded $2.7 million to support research on how drones can assist in disaster preparedness and in emergencies.
“Every second counts in an emergency, and this funding will allow drones to safely and more quickly deploy in moments when minutes matter,” said Acting FAA Administrator Billy Nolen.
A policeman works with a drone. (Photo: FAA)Photo:
The research will explore the use of drones in providing effective and efficient responses to different natural and human-made disasters. It will address coordination procedures among drone operators from federal agencies as well as state and local disaster preparedness and emergency response organizations. The five universities and their award amounts are:
University of Vermont: $1,195,000
University of Alabama Huntsville: $828,070
New Mexico State University: $400,000
North Carolina State University: $200,000
Kansas State University: $145,000
Today’s announcement is the third round of Alliance for System Safety of UAS through Research Excellence (ASSURE) grants, which brings the total to 20 grants valued at $21 million for Fiscal Year 2022.
The ASSURE Center of Excellence is one of six the agency has established to help advance technology and educate the next generation of aviation professionals. Research conducted through ASSURE is focused on helping the drone community safely grow and integrate into the nation’s airspace.
Earlier in 2022, Transportation Secretary Pete Buttigieg outlined six key Innovation Principles the department will apply when fostering transportation technologies. While continuing to commit to the highest standards of safety across technologies, these awards demonstrate the department’s commitment to exploring ways to leverage innovation to help communities and public-sector partners through experimentation.
More than 850,000 recreational and commercial drones are in the active drone fleet, and that number is expected to grow.
DIU accelerates commercial GEOINT and NAVWAR tools and capabilities to the warfighter
The U.S. Defense Innovation Unit (DIU) will be testing ways to mitigate disruptions to GNSS signals this fall.
Disruptions include those from intentional sources, such as spoofing, as well as intentional or unintentional jamming. Intentional tactics can be applied by adversarial nation states, criminal networks or privateers.
The shared interests between the government and private citizens alike for awareness of GPS disruptions make commercial solutions ideal; information and insight can be broadly shared not just within the U.S. Department of Defense (DOD), but across agencies, allied partners and the public as needed.
In the Fall of 2021, the DIU launched the Harmonious Rook prototype project to address the need for scalable, persistent awareness of positioning, navigation and timing (PNT) disruptions across the globe.
This September, the Harmonious Rook team will support the U.S. Army 1st Armored Division’s Command Post Exercise (CPX) at the National Training Center (NTC), Fort Irwin, California. The exercise is focused on large-scale combat operations (LSCO) and intended to stress the division headquarters’ ability to deploy to an austere location and command and control its units utilizing a synthetic training environment.
U.S. and multinational maritime forces participate in SEACAT 2021. (Photo: NTC)
Parallel to this training event is the 2nd Brigade, 1st Armored Division’s external validation exercise, also at NTC, in which the 2nd Brigade will be stressed and evaluated on its ability to deploy while contested and conduct LSCO exercises against a live opposing force.
Several DOD and civilian agencies are participating, including the National Air and Space Intelligence Center (NASIC) and the National Space Intelligence Center (NSIC). Multiple non-traditional vendors and non-governmental organizations are also supporting Harmonious Rook, from data delivery, to machine learning analytics, to visualization and contextualization.
Vendor Participation
Several Harmonious Rook vendors will participate in notable DOD and international exercises. In August 2022, prototyping companies will support the Southeast Asia Cooperation and Training (SEACAT) exercise, where more than 20 Indo-Pacific countries will train and collaborate on the common goal of maritime crises and illegal activities response.
During this multinational exercise, commercial firms will provide space-based geolocation reports and maritime analytical services, and integrate the insights into the U.S. Navy’s and Department of Transportation’s shared visualization platform, Seavision.
DIU is also working to explore the use of publicly available PNT data to draw insight from domestic GPS interference events.
“Mapping GPS disruptions and contextualizing patterns of behavior are key to mitigating the effects of degraded PNT as well as enabling safety of navigation under such conditions,” said Lt. Col. Nicholas Estep, Harmonious Rook program manager, USAF. “Instead of developing, building, and deploying hardware tailored for collection of navigation warfare operations, we are accessing currently available commercial data and analytics to address the need for PNT situational awareness. There are billions of GPS users and devices distributed across the world that may be adversely affected and turning the vulnerability into an advantage for discovery, classification and attribution of such malicious activity is a key aspect of this effort.”
“The Harmonious Rook project is a very promising new approach that complements traditional collection methodologies, as it will help our customers by sharing analysis due to the unclassified and commercial nature of the data,” said Scott Feairheller, senior analyst at NSIC.
“While the Army works diligently to acquire relevant equipment to assist in the real-time recognition and characterization of potential adversary interference, we must leverage non-organic, commercially available software and equipment, like Harmonious Rook, as a stopgap to increase awareness, seize digital key terrain and maximize lethality,” said Lt. Col. Patrick Jones of 1st Armored Division’s Space Support Element (SSE). During the exercise, capabilities will be tested to support intelligence, information operations, and command and control elements with commercial geospatial and navigation warfare awareness at the tactical level.
DIU’s Harmonious Rook program is not limited to the DOD and the malicious activity more commonly observed overseas and in combat environments. DIU is also working to explore the use of publicly available PNT data to draw insight from domestic GPS interference events, a mission with interest from the U.S. civil agencies.
With widespread users and subscribers that rely on PNT services, any intentional or unintentional disruption can lead to severe transportation, communication and financial implications. This highlights the importance of bringing both government and private-sector industries together to identify, attribute and mitigate GPS interference as quickly as possible.
Amazon has put out a video to show how the company is building its drone delivery service. The fully electric drones are designed to deliver packages under 5 pounds to customers in less than 60 minutes.
Later this year, customers living in Lockeford, California and College Station, Texas will be among the first to receive Prime Air drone deliveries.
Three components are integral to the system:
The drone itself, which Amazon said is as robust and reliable as its ground transportation trucks.
A sense-and-avoid system for obstacles such as other aircraft, people and pets in backyards.
An automated drone-management system to plan flight paths and ensure safe distances between the drones and other aircraft in the area, and ensure compliance with aviation regulations.
Amazon has been developing its drone delivery system for almost a decade, employing experts in safety, aerospace, science, robotics, software, hardware, testing and manufacturing.
Below is an inside look at an Amazon flight-testing facility in Oregon.
Tesla has applied to patent a new multi-band GNSS antenna with increased precision for self-driving and navigation in its autos, reports electrek. The antenna would be positioned inside the rear-mirror enclosure, and the system would also provide a heating element.
While increasing precision, it is also designed to reduce power demand, noise and cost.
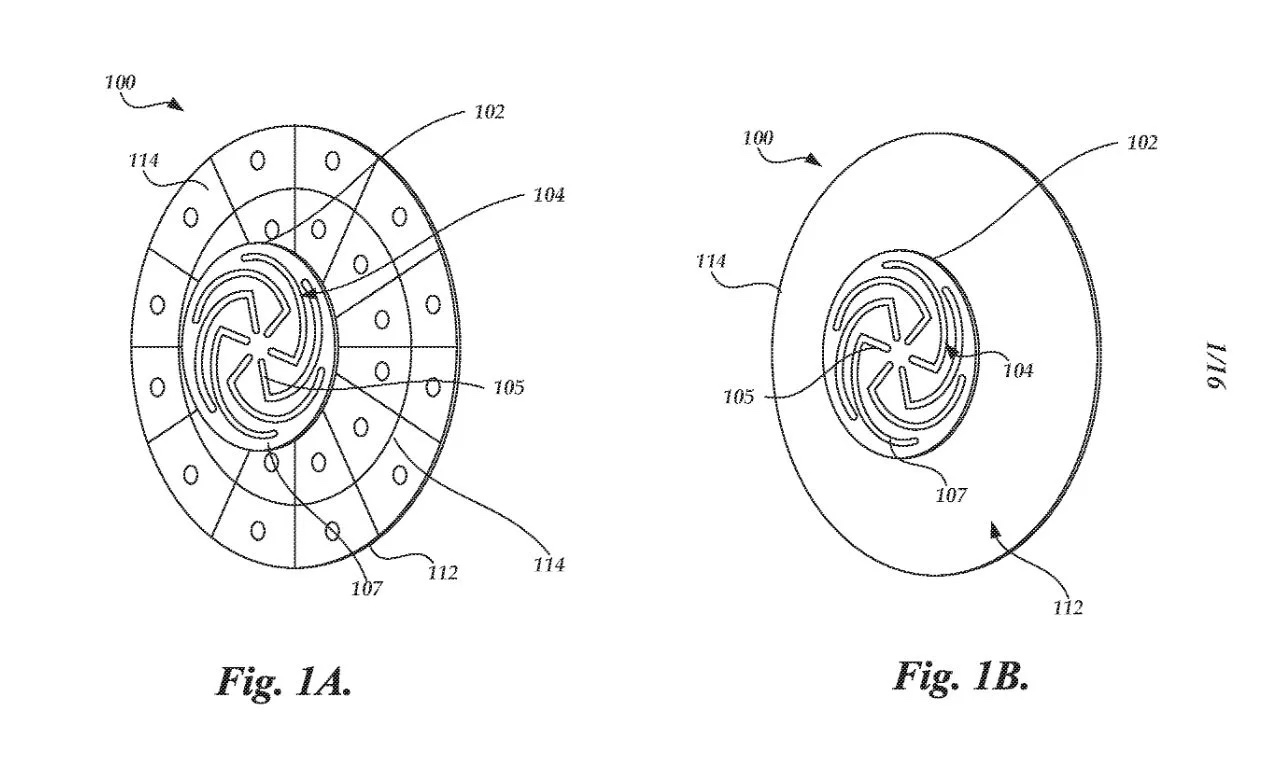
The automaker describes the new device in the abstract of the new patent application:
A multi-band antenna system is provided. The antenna system can be placed under and embedded within a glass exterior surface of a vehicle. Such an antenna system can include a capacitively coupled metallic element on or adjacent to the glass exterior surface, which can serve as both a parasitic element to enhance gain and as a heating element to melt snow and/or ice accumulation over the glass area that covers the antenna. In certain applications, the antenna’s structure itself can be used as a heater to improve performance in adverse weather conditions while the heating elements are positioned away from the thermally sensitive electronics. The antenna system with integrated heating can include a spiral antenna.
A diagram of the antenna provided with the patent application. (U.S. Patent Office)
A cockpit platform from Qualcomm Technologies will power the navigation and infotainment system in the new Scorpio-N SUV from Mahindra Auto of India. The navigation system includes the option to use what3words.
Photo: Mahindra
The Scorpio-N features a 17.78-cm color driver information display and 20.32 -m infotainment system with navigation. Leveraging the third-generation Snapdragon Cockpit Platform, the Scorpio-N enables the latest in personalization and natural interaction between a vehicle and its driver. It provides virtual assistance and ultra-high-definition, as well as immersive audio and visual experiences.
The platform helps monitor driving and detect objects for the security of passengers and vehicular data. It features an advanced suite of wireless technologies to support multi-mode cellular connectivity, Wi-Fi 6, and enhanced Bluetooth technologies.
InfiniDome has conducted testing and measurements in the Golan Heights along the Israel-Syria border. The goal of the tests was to hunt down jamming events, record them, see how they affect both protected and unprotected receivers, and then compare the results.
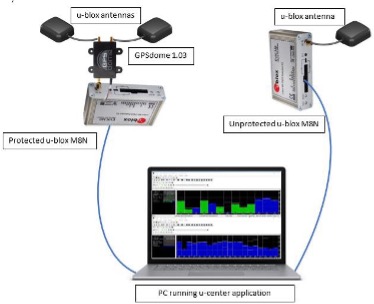
Two identical u-blox M8N receivers aboard a UAV were tested side by side, with one protected by GPSdome technology.
The GPSdome anti-jammer is a retrofit module that can be easily integrated to protect any GNSS-based system. It combines patterns from two omnidirectional antennas to create a null in the direction of the jamming signal, thus attenuating its power, making any GPS receiver about 50 times more resilient to jamming.
In a video of the tests, the GNSS receiver protected by GPSdome can be seen maintaining the GPS signal along the border, enabling uninterrupted navigation.
In contrast, the unprotected GNSS receiver loses the GPS signal during the attack, which can easily result in the drone becoming completely jammed, aggressively drifting and eventually crashing.
The Israel-Syria border experiences frequent jamming from Russian forces positioned in Syria, affecting critical border surveillance operations in the Golan Heights. Other global hotspots for jamming include the U.S.-Mexico border, where drug cartels use jammers on U.S. border surveillance drones, and the Shanghai port in China, where pirates may be the cause of ship and plane navigation confusion through use of jammers.
Jamming in Ukraine has also been well documented, with attacks from Russian forces taking down any plane, drone and even critical infrastructure asset in proximity, according to infiniDome.
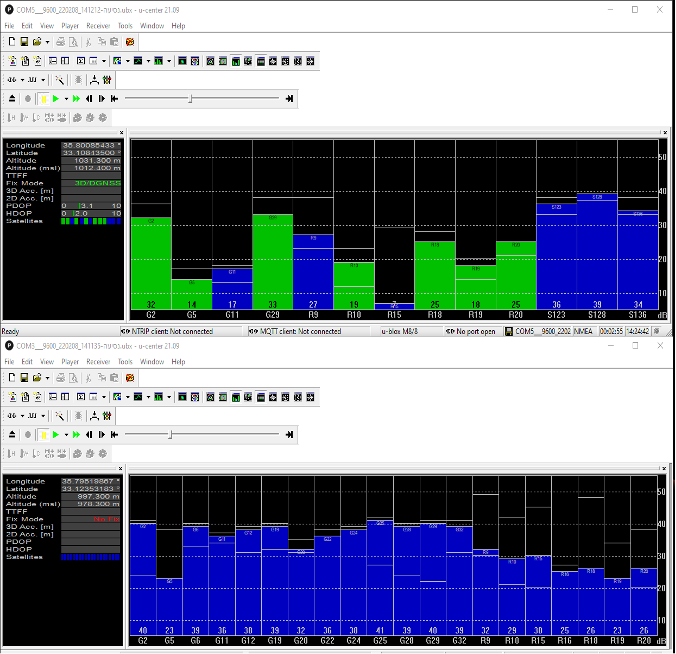
Two screenshots of recordings during the event: The top image is of the GNSS receiver (u-blox M8N) protected with the GPSdome, ensuring continuous navigation. The bottom is unprotected and shows how the M8N was completely blocked for the entire route. (Images: InfiniDome)
The jamming attack was analyzed and appears not to have been a brute force attack, but rather a slightly more sophisticated signal, causing the receivers to “see” satellites but not be able to sync their signals and track them. The receiver protected by the GPSdome was able to distinguish between the real GNSS signals and the jamming signals.
In addition, GPSdome was able to attenuate the jamming signals sufficiently to be able to continue tracking the real GNSS signals while at the same time reporting the attack via its dedicated alert output.
Because GPSdome is both lightweight and easy to integrate (see integration diagram below), it can effectively provide much-needed resilience to drones and UAVs from widely available jammers, enabling drone operators to carry out missions safely and reliably.
Trimble Autonomy has introduced the Trimble BD9250, a dual-frequency OEM GNSS receiver module that supports Trimble RTX correction services.
The receiver is designed to deliver high-accuracy positioning for a range of high volume, autonomous-ready applications used in the agriculture, construction, robotics and logistics industries worldwide.
The BD9250 is a compact receiver with an industry-standard form factor and pinout, allowing for easy system integration and configuration. Equipped with Trimble’s advanced ProPoint positioning engine, the BD9250 delivers robust and accurate positioning.
The BD9250 receiver is compatible with Trimble RTX correction services or real-time kinematic (RTK) and supports all major GNSS constellations, including GPS, Galileo, GLONASS, BeiDou, QZSS and NavIC. Support for the Indian NavIC S-Band signal is also available with the Trimble BD9250s version.
The receivers include the capability to enable system integrators to choose either the L2 orL5 frequency to optimize signal performance and maximize the number of measurements available to the GNSS engine.
“The BD9250 provides centimeter-level RTX accuracy without the need of a base station,” said Finlay Wood, general manager, off-road, Trimble Autonomy. “This OEM GNSS board is ideal for high-volume autonomy applications that require precise positioning, without sacrificing accuracy, availability or integrity — enabling integrators to bring systems to market faster.”
The Trimble BD9250 and BD9250s evaluation receiver modules and the Trimble RTX correction service subscription are available now through Trimble’s OEM GNSS sales channel.
Topcon’s ultra-compact B111A GNSS receiver board can provide scalable positioning from sub-meter differential GPS to sub-centimeter real-time kinematic (RTK) positioning. The board’s flexible design — low power consumption, comprehensive communication interfaces and peripheral support — make it easy to integrate the B111A into any precise positioning application, Topcon said.
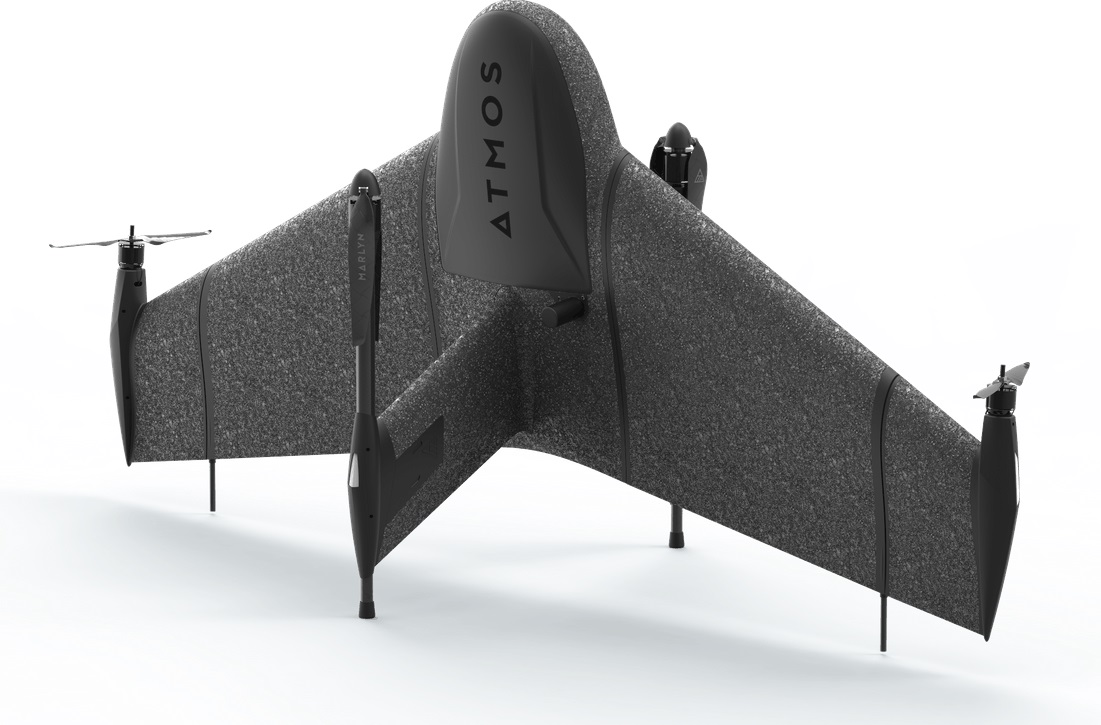
Besides in surveying and mapping, survey drones are now used in a broad spectrum of applications ranging from construction and mining to agriculture and environmental monitoring.
The Atmos Marlyn Cobalt is a vertical-takeoff-and-landing (VTOL) fixed-wing mapping drone developed by Atmos with the goal of allowing users to effortlessly collect accurate geospatial information and turn it into actionable insights. “Our mission is to provide professionals with the tool with which they can plan a better future with precision,” said Ruud Knoops, Atmos CEO.
To provide precise positioning accuracy, a GNSS board needs to compensate for inaccuracies caused by satellite constellations, receiver hardware and atmospheric conditions.
The use of Topnet Live — Topcon’s GNSS real-time correction service — provides high-accuracy positioning and survey-grade results to professionals through a 24/7 cross-border, consistent and reliable access. The combination removes the need for base stations, increasing efficiency leading to higher productivity and decreased costs.
This image shows the effect of increased elevation on surface area and obstacle avoidance. (Image: Advanced Navigation)
By Simon Harris, Advanced Navigation
Lidar-based surveying is increasing in demand across a range of industries. Recent market analyses indicate that lidar surveying is a multi-billion dollar industry that is expected to deliver sustained growth for years to come. As lidar technology matures and performance increases, its range of use is broadening into surveying more complex and difficult terrain or at speeds and in environments previously unsuited to such technology. Naturally, increasing diversity and performance brings about demands for greater reliability, speed and accuracy whilst remaining within physical and regulatory limitations.
Keeping pace with market demands in UAV and rail sector lidar surveying is increasingly challenging and requires an evolving synthesis between the acquisition and processing of lidar and GNSS-INS georeferencing data. Companies such as Cordel and its subsidiary Nextcore are taking advantage of the latest technologies to develop systems that are setting new benchmarks in these sectors.
Benefits of Altitude, Faster Lidar and Precision INS
UAV lidar surveying is capable of high-resolution surveys of complex terrain, vegetated areas and in light conditions that may be unsuitable to photogrammetry. These qualities make it a preferred option in many applications. However, it must remain cost-competitive with alternative solutions to become widely adopted by the surveying industry.
Typical UAV lidar surveying is performed at ~40m AGL. This altitude commonly presents collision risks with terrain and vegetation and imposes limits where the topography changes dramatically, such as voids that increase AGL beyond acceptable limits. Higher altitude surveying, therefore, offers obvious advantages, but also deeply challenges lidar sensors and the INS. Any mismatch in operational performance and accuracy between these inevitably degrades survey quality and severely limits use of the system.
Nextcore accepted the challenge and set about developing a viable solution that could maintain a point cloud density of 200-500 points per m2 from a target altitude of 70 m. This equates to generating lidar point cloud data at millions of points per second. Achieving this required a GNSS-INS that provided suitably precise georeferencing data. Because survey data is derived from a source that is in constant motion in 3D space, the capability of the GNSS-INS is paramount in producing a digital twin of value and is critical to mission success.
After testing and evaluating various INSs from different manufacturers, Nextcore coupled its lidar with Advanced Navigation’s MEMs-based Certus Evo INS, which provides near-FOG performance and has a drift rate of 0.2 degrees/hour. This combination yielded exceptional results that allowed them to vastly extend the altitude ceiling to 120m while retaining consistent, accurate survey data.
“Operation at this altitude not only reduces the risk of collisions with trees, it enables surveyors to cover larger areas, greatly improving the solution’s efficiency,” said Ashley Cox, founder and COO of Nextcore.
Higher altitudes tend to increase the lidar swath width. The typical swath width at ~50m altitude is ~120m, depending on actual altitude and the resulting angle of incidence of lidar toward the edges of the swath. At 120m, a reliable swath width of 180m was achieved. This is a 50% increase over previous, equating to approximately 33% fewer flight-lines to survey a given area — a notable boost for productivity and efficiency to surveyors.
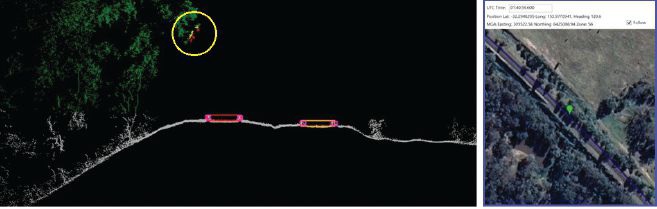
Example of rail track lidar showing encroaching vegetation, with associated map and location information. The yellow circle in the lidar data shows vegetation that is starting to intrude into the train’s path. (Images: Advanced Navigation)
Payload minimization also was a critical aspect in the search for an INS, as surveyors are always seeking longer flying time. This only can be achieved with a lighter technology stack payload. The team used an OEM version of the INS for a smaller form factor that could be integrated within a single ruggedized housing. This allows a design with greater strength, weather resistance and efficient payload setup.
“The industry is constantly seeking lighter payloads for longer flight times and to fit on smaller, safer UAVs,” Cox said. “Regulatory restrictions challenge the industry to meet certain specifications. The same is true for UAV lidar. We hit a ceiling. We need to be able to improve on that, although what we’re achieving now is a real game changer.”
The resulting survey material contains lidar point cloud data and the geo-referencing data from the INS. All data processing is performed post-flight to ensure the highest possible accuracy. PPK is used for correction of GNSS-INS position, roll, pitch and heading data. The processed INS data is then combined with the processed point cloud data to provide absolute position to the point cloud. This system realized consistent 30~40mm precision at 120m AGL. Nextcore has integrated the lidar and INS processing platforms to automate the synthesis of data sets, reducing the survey completion time. Depending on the survey’s size and complexity, this solution can process survey data into a 3D map within 30 minutes of mission completion.
Nextcore used a Certus Evo GNSS receiver, which internally uses the u-blox ZED-F9P chip. It logs GPS L1, L2, GLONASS L1, L2, Galileo GalE1, E5, and BeiDou B1, B2 frequencies at 8 Hz. It used the Kinematica correction service running a PPK filter.
Lidar sensors have become light enough to mount on UAVs (Photo: Advanced Navigation)
Scanning Rail Corridors Super Fast
Aerial surveying is not the only environment to present challenges to lidar and INS.
Train-mounted lidar for automated track and rail corridor surveying is another burgeoning market. This application typically uses lidar and position data to detect and identify areas of the railway that require maintenance and, perhaps more importantly, preventive maintenance. Rail surveying presents unique demands, including operating at speeds of 160km/h (100mp/h) or more, maintaining position accuracy during GNSS outages and variable environmental conditions.
Land-based surveying provides flexibility for selecting an INS compared to aerial applications, as size and weight are usually irrelevant. Rail surveying also requires an INS that provides the necessary performance while tolerating vibration and erratic movement from junctions, points and signals, and be absolutely dependable in GNSS-denied situations. Cox’s team found that the greater accuracy and better drift stability of FOG INS over MEMS provided an ideal platform for generating reliable and accurate paths of train trajectory.
Cordel tested Advanced Navigation’s Boreas digital FOG INS as a potential solution. Testing was carried out using cars as a simulation, travelling complex routes in two directions then overlaying the lidar point clouds to check for discrepancies or unsynchronized areas. The results provided the confidence to put the Boreas into service.
Railways typically traverse deep cuttings, lengthy tunnels and other environments that disrupt GNSS. It is mission-critical that the INS can apply dead reckoning the instant GNSS is disrupted and maintain accurate position for the entirety of the outage. Reliable path and location data during GNSS disruptions is central to the viability of automated rail surveying. Blind spots or zones of unreliable route data cannot be tolerated by rail operators from safety, track availability and financial perspectives.
The Cordel AI lidar analysis system can be “tuned” to the required metrics and is capable of self-learning. The AI enables the system to pre-emptively identify and flag areas of concern before they become an actual problem or hazard. Examples include measuring track gauge and alignment, ballast distribution and coverage, and clearance between potential hazards to the train. The entire route is logged, creating a “Google map” of the railway that maintains a historical record of survey data each time the track is used.
Clients can then view a representation of the lidar data to get a clear understanding of any issues and how to respond before sending personnel or assets to a location. This enables intervention before safety is compromised or remedial works become large-scale and disruptive. As a result, rail service providers can maintain safer railways, deliver more reliable services, and minimize operating costs.