Allows upgrades of older machinery for smaller farms
Topcon’s has created a Value Line Steering solution for farmers using mid-range tractors on small- to medium-sized farms. It makes autosteering technology — typically used on larger machinery — accessible to a broader range of farmers. Farmers with older or smaller machinery, or small specialty farms, can boost the value of their machinery with the autosteering technology. The integrated system is designed to work across a wide range of applications, machinery and brands. It includes compliance with ISOBUS-UT to offer universal compatibility and ease of use. The package includes a GNSS receiver, electric steering wheel controller, touchscreen console and Horizon Lite software, compatible with front-wheel-steer tractors. Farmers can add local, satellite or RTK correction services such as Topcon’s Topnet Live for enhanced precision.
Aero Drop Systems (ADS) has developed Pathfinder, a proprietary autonomous navigation framework designed to reduce dependence on GNSS-based positioning. Pathfinder is signal-resilient, capable of maintaining precision even in complete GNSS dead zones and unaffected by deceptive interference.
At the core of Pathfinder lies an array of sensors and advanced self-regulating logic driven by machine learning. Unlike traditional systems that treat GPS as a singular source of truth, Pathfinder fuses a constant stream of information from multiple internal and external domains and dynamically rebalances itself in real time as it evaluates, cross-verifies, and refines its positional understanding based on an algorithm that classifies the trustworthiness of each data stream.
The result is a self-correcting navigation intelligence that can anticipate changing conditions, isolate false data, and continue to perform when other systems cannot. This allows Pathfinder to sustain highly accurate navigation during satellite connection or radio frequency outages or when being targeted with jamming or spoofing.
Designed as a modular framework, Pathfinder can be integrated across a range of fully autonomous platforms operating on land, at sea, or in the air. Its flexible architecture makes it suitable for both commercial logistics and defense applications, where navigation integrity is critical to mission success.
Currently in the testing phase, Pathfinder is part of ADS’s broader initiative to develop resilient, autonomous logistics technologies capable of performing in contested and complex environments. ADS has confirmed that Pathfinder will serve as the core navigation technology for the platform Aerocrate. Aerocrate is a disposable, autonomous aerial delivery system that enables precise, reliable resupply without requiring recovery operations, staging areas, or active communication with the platform.
The demand for autonomy is accelerating across industries, reshaping how systems are being developed and deployed.
For UAVs, the push for precision is driven by emerging use cases, such as package delivery, medical transport and complex route navigation in urban environments, all of which require centimeter-level accuracy in positioning and landing.
Importance of Correction Services
Trimble is expanding its Centerpoint RTX positioning technology from agriculture and surveying applications into the rapidly growing autonomous markets of UAVs, robotics and vehicles.
CenterPoint RTX is a global correction service that delivers centimeter-level positioning accuracy, engineered to ensure reliable and precise positioning anywhere around the world.
RTX employs a fixed, stable datum to ensure consistent and reliable performance. The system supports all major satellite constellations and frequencies, offering users a robust and flexible positioning system. The service can be accessed through either L-band satellite signals or a standard internet connection, eliminating the need for local base stations and making high-precision positioning far more scalable and accessible.
This level of reliability is crucial for emerging applications such as drone delivery.
“When you start talking about package delivery, operators need robust positioning,” explained Joe Hutton, director of inertial technology and airborne products at Trimble Applanix. “One reason is what we call ‘the last meter’ — drones need to be able to land or drop packages consistently within that final meter of their destination.”
Hutton noted that precision requirements are becoming even more demanding. “It’s actually getting smaller than a meter now. You need that robust centimeter-level positioning to ensure the drone is in exactly the right spot for safe and accurate delivery.”
When asked about alternative positioning methods, Hutton explained why traditional RTK systems can fall short for these applications. “RTK has its traditional limitations,” he said. “You have to be within 20 km of a base station, you need to set up infrastructure, and then you face all kinds of datum issues between different base stations.”
This is where CenterPoint RTX offers a significant advantage. “You don’t get those problems with CenterPoint RTX because it’s a global correction service operating on a fixed reference datum that never changes,” Hutton explained. “If you use the same technology to survey your landing spot — say with a Trimble DA2 product using RTX — everything fits perfectly. It’s always going to be in the same datum.” He noted that this consistency has proven very popular with users because it eliminates the complex datum coordination issues inherent in RTK systems.
Beyond datum consistency, Hutton highlighted another critical consideration: signal robustness and jamming and spoofing. “While commercial drone applications typically operate outside conflict zones where intentional jamming occurs, operators still need protection against interference,” he said. “You can have radios causing jamming just inadvertently.”
Trimble’s OEM GNSS/INS systems for UAV navigation, such as Trimble PX-1, use aided inertial navigation system (INS) software that blends GPS positioning with inertial sensors using RTX corrections to offer robust position and orientation data — including precise roll, pitch and heading measurements — that can maintain accuracy even during short GNSS signal outages.
The system provides inertial-based heading, which addresses another critical challenge in drone navigation. Traditional approaches rely on magnetometers for heading determination, but these are easily influenced by nearby metal structures and electromagnetic interference. In contrast, inertial-derived heading comes directly from the IMU itself, making it immune to magnetic disturbances and far more reliable in complex environments, making it suitable for drone delivery in busy urban environments.
Advanced Navigation has successfully demonstrated a breakthrough in underground navigation, delivering high-precision positioning without reliance on fixed infrastructure or GNSS.
The demonstration of the company’s Hybrid Navigation System was livestreamed from the Pyhäsalmi Mine in Pyhäjärvi, Finland, as part of the Deep Mining Open Call under the Think and Act Differently program sponsored by BHP, an Australian mining and metals corporation.
The Deep Mining Open Call, launched in September 2024, sought innovators with capability that could be applied to deep underground mining. The focus was on addressing challenges such as high temperature, high rock stress, and hyper-saline conditions in deep mining environments. The inactive Pyhäsalmi mine has the harsh conditions and depth required for the technology test.
Based in Australia, Advanced Navigation was selected from more than 90 global applicants to demonstrate its technology.
Positioning Challenges
Navigating the vast subterranean network of the Pyhäsalmi Mine posed significant challenges. The mine is situated just two degrees below the Arctic Circle, where traditional systems fail. Located 1.4 km underground at a latitude of 63°, it is completely impervious to GNSS signals. Its repetitive, multi-level tunnel network creates a high risk of visual disorientation, while its metallic ores distort magnetic fields and scatter radio waves.
To overcome these conditions, mines typically rely on infrastructure-heavy solutions such as ultra-wideband beacons, Wi-Fi, 5G repeaters or perception-based techniques such as simultaneous localization and mapping (SLAM), which require cameras. These methods are costly to integrate and maintain, slow to install, and often unavailable in hazardous or unmapped zones where reliable navigation is critical. Shifting to a resilient navigation system with less dependency on infrastructure offers a scalable alternative, enabling reliable navigation even in environments considered hazardous or inaccessible.
System Architecture
Advanced Navigation’s Hybrid Navigation System demonstrates long-range, infrastructure-free, real-time navigation in a deep, GPS-denied environment. The system combines a laser velocity sensor (LVS) with the Boreas D90 fiber-optic gyroscope inertial navigation system (FOG INS).
FOG INS. The Hybrid Navigation System is centered on the Boreas FOG INS. Unlike conventional systems, Boreas doesn’t rely on GNSS or magnetic compasses. Instead, it uses ultra-sensitive FOG technology to detect the Earth’s rotation and determine true north, a process known as gyro-compassing, to find the vehicle’s heading.
For the test, the Boreas D90, along with various additional equipment providing power, networking and logging capabilities, was secured inside the vehicle.
LVS. To maintain and enhance this accuracy, the INS is fused with Advanced Navigation’s LVS. Using infrared lasers, LVS continuously measures the vehicle’s true 3D velocity relative to the ground. This real-time data is critical for correcting the gradual drift that occurs in standalone inertial systems, enabling the hybrid system to maintain precision over extended distances.
The LVS sensor features two components: an external, passive optical head, and an active sensor body. The optical head is primarily responsible for rigidly holding the alignment between the three telescopes. The sensor body houses the active photonics system, laser and processing system.
Because pre-production hardware was used for this test, three discrete fiber-optic cables were used to connect the externally mounted LVS optical head to the LVS sensor inside the vehicle. Production hardware will include a single, IP69K rated optical-fiber cable that connects the LVS sensor body to the IP69K rated optical head.
The LVS optical head was attached to the trunk of the vehicle using a suction cup to provide a clear line of sight from each telescope to the terrain. A GNSS antenna was attached to the roof in the same manner. Coaxial cable connected the GNSS antenna to the Boreas D90.
Fusion Software. The system integration relied on the company’s AdNav OS Fusion software. Using adaptive algorithms, OS Fusion dynamically weighs the reliability of each sensor in real time.
Together, these technologies form a resilient hybrid system delivering precise, uninterrupted navigational data in extreme environments, without GNSS or fixed infrastructure, the company said.
“We were thoroughly impressed by the results the sensor fusion provided,” said Magnus Zetterberg, senior consultant at Combitech, who observed the demonstration. “I have used and been exposed to these sorts of sensors in other projects, and nothing has come close to this level of performance. It’s clear the Laser Velocity Sensor is a major key in providing these outstanding results.”
Proven in the Depths
A one-time surface calibration using real-time kinematic GNSS aligned the LVS and INS frames on the vehicle, a Mercedes-Benz V-class. After the calibration, the trials were unaided within the underground environment.
Two different test scenarios were conducted: a surface-to-surface test, and an underground loop test. Validated across five separate runs in isolation from external aids or maps, the Hybrid Navigation System repeatedly achieved an accuracy of better than 0.1% of distance traveled — demolishing a barrier once considered fundamental to underground navigation.
Without relying on any fixed positioning infrastructure, pre-existing maps or external aiding, the tests achieved consistent sub-0.1% navigation error across multiple runs.
Surface-to-Surface Runs
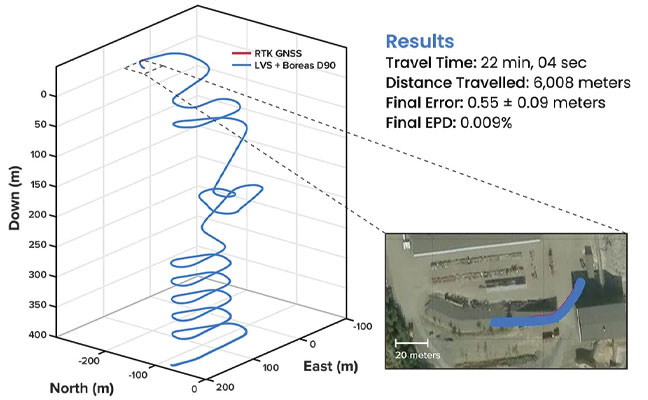
Runs 1, 2 and 3 – 400 m. To demonstrate the system’s repeatability and accuracy, three identical runs were conducted to a depth of 400 meters. Each run involved an approximate 3 km one-way traverse for a full 6 km loop. The results highlight the system’s consistent performance during underground operation, with a mean final position error of 2.83 ±0.09 meters, representing 0.047% of the total distance traveled.
FIGURE 1 3D navigation trace of run 2 of the repeat surface-to-surface 400 m depth tests. This particular run covered 6,008 m, with a measured error of 0.55 ±0.09 m for 0.009% error per distance traveled.
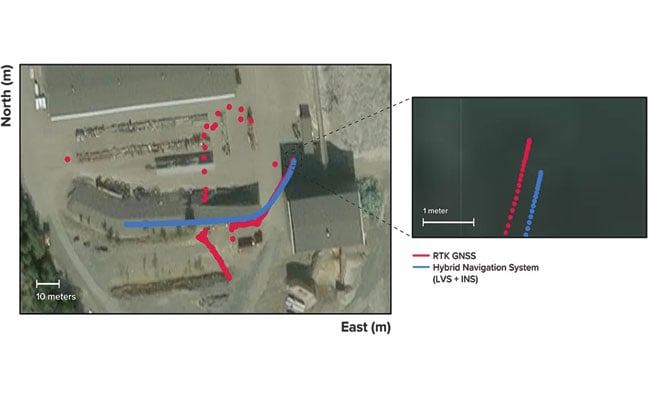
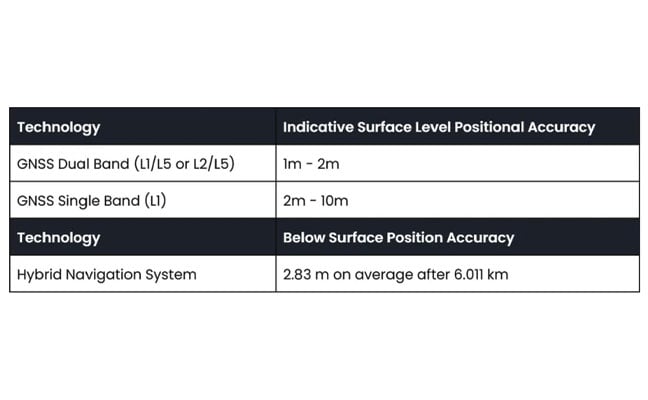
Over the 6 km rough and rugged terrain that extended 400 m below the surface, the system achieved a best-case 3D position error of 0.55 m (0.009%), with an average error of 2.83 m (0.047%). For context, standard single-band GNSS on the surface typically delivers 2–10 m accuracy in open-sky conditions. The system delivered significantly greater precision even within a subterranean labyrinth. FIGURE 1 present the key performance metrics for these runs. FIGURE 2 shows reacquisition of GNSS signals upon exiting the mine.
FIGURE 2 Traces of raw RTK GNSS and position estimates from the Hybrid Navigation System. As the vehicle exits the tunnel portal, intermittent and low accuracy GNSS is measured. Once the vehicle enters open sky, a more consistent RTK GNSS fix is attained. Note that despite the presence of now-accurate RTK GNSS, at no point did the Hybrid System use GNSS information.
“We’ve worked in underground environments for decades. Seeing this level of precision achieved on the first run signals huge potential for safer and more efficient underground vehicle operations,” said Olli Mylläri, vice president of technology at Normet, a mining technology company.
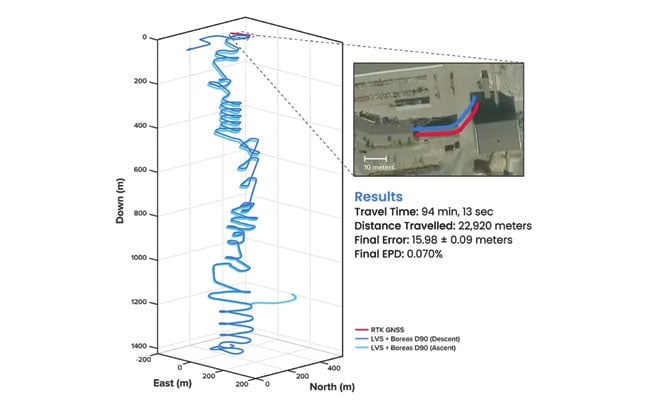
Run 4 – 1,400 m. To evaluate the system’s performance over an extended distance, a single run was conducted to the deepest accessible point of the mine, reaching a depth of 1,400 m. The system navigated the 22.9 km route — the equivalent of a half-marathon — in total darkness.
The final position error was 15.9 m (0.07%), showcasing its immunity to the drift that plagues other inertial systems. This extended traverse, lasting more than 94 minutes, also included a deliberate stationary period at the bottom before the return to the surface. The performance of this deep run is detailed in FIGURE 3.
FIGURE 3 3D navigation trace of the run down to 1,400 m depth. The test traversed a total distance of 22,920 m, with a measured final error of 15.98 ±0.09 m yielding an error per distance traveled of 0.070%. The descent and ascent paths are colored differently for disambiguation. During the ascent (light blue), the driver entered a side tunnel at a depth of approximately 1,200 m, which was not traversed on the descent.
Entirely Underground
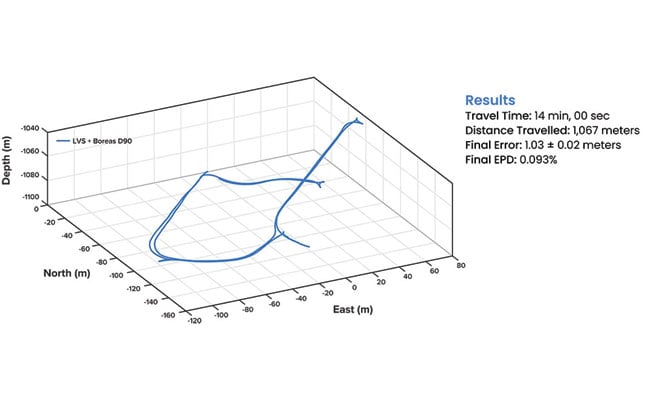
Run 5 – 1,067 m. A single run of 1,067 m was conducted over a period of 14 minutes. Without relying on magnetometers or external aids, the system determined heading using its built-in gyrocompassing procedure, measuring the Earth’s rotation to establish true north. It then navigated a 1 km course with just 1 meter of error, demonstrating its capability for rapid deployment in the most challenging and unfamiliar terrain. See results in FIGURE 4.
FIGURE 4 3D navigation trace of the entirely underground run. The test traversed a total distance of 1,067 m, with a measured final error of 1.03 ±0.02 m, yielding an error per distance traveled of 0.093%.
While additional testing was planned to further validate the results, time constraints limited this study to a single test. The findings provide a representative indication of system performance under the tested conditions. TABLE 1 shows a comparison to GNSS navigation.
TABLE 1 Indicative industry-reported positional accuracy of GNSS compared to the Hybrid Navigation System.
Scalable Autonomy
While mines will continue to use fixed infrastructure, this technology significantly reduces dependency, enabling resilient, high-precision navigation in previously inaccessible or unmapped areas. This performance marks a step change in underground navigation, unlocking new potential for fleet management, predictive collision avoidance, material tracking and scalable autonomy across mining operations.
“At Normet, we specialize in advanced solutions for underground mining and tunneling, so we know firsthand how difficult accurate and reliable navigation can be in these environments,” Mylläri said. “Seeing Advanced Navigation’s Hybrid Navigation System deliver consistent positioning with minimal infrastructure deep within the Pyhäsalmi Mine was remarkable. It’s a powerful step forward for automation and safety in the underground space.”
In today’s dynamic operational environments, relying on a single navigation technology is no longer viable. Robust navigation demands a layered, inertial-first and multi-sensor architecture — held together by intelligent software — that can adapt and scale to meet the unique demands of each operation.
“Ultimately, this vehicle-based, inertial-centered architecture provides the resilient foundation required for the mining sector to achieve its long-term goal: efficient autonomous ore extraction at depths hostile to human activity,” Vandecar said.
“Unreliable navigation underground isn’t a minor technical constraint — it’s a major operational bottleneck,” said Joe Vandecar, senior product manager, Advanced Navigation. “Maintaining precision over a 22.9 km subterranean course in Europe’s deepest underground mine demonstrates a level of performance that few systems in the world can rival without any prior intelligence of the environment. These results prove we’re one step closer to unlocking scalable underground autonomy.”
The Hybrid Navigation System is set for commercial release later this year.
Adapted from a paper authored by Patrick Wiltshire, David McManus, James Spollard, Mark Gibson, Matthew Suntup, Tim Laws and Lyle Roberts. The full paper is available on the Advanced Navigation website (advancednavigation.com).
UAV Navigation-Grupo Oesía, a developer of flight control systems for UAVs, has completed integration and validation of ATMOSPHERE’s Iridium terminal into its VECTOR family of flight control computers. The integration was tested in flight conditions.
ATMOSPHERE’s Iridium terminal has been integrated into UAV Navigation-Grupo Oesía’s flight control system via RS-232 serial communication. The integration enables command and control beyond visual line of sight.
During flight tests, the communication link remained stable, with telemetry performance comparable to traditional radio systems.
The guidance, navigation and control system allows autonomous operation without requiring a control station link during flight. The integration supports two-way communication for mission updates and re-tasking. UAV Navigation-Grupo Oesía said the integration expands options for beyond visual line of sight operations.
The integration is part of the company’s effort to enhance operational capabilities for its clients. The system’s interoperability has been expanded to work with additional communication infrastructures and mission profiles. Iridium’s global coverage and low-latency service enable operators to maintain control of platforms in remote areas, over oceans or in environments where radio links may be unavailable.
The development applies to defense, security and industrial applications where beyond visual line of sight (BVLOS) operations require reliable communication. UAV Navigation-Grupo Oesía provides autonomous flight solutions.
The term “urban canyon” was inspired by New York’s Canyon of Heroes — a stretch of Lower Broadway where tall buildings line the streets similar to a canyoenn. These human-built canyons can confuse GNSS receivers making it hard to accurately calculate a vehicle’s position. For autonomous cars, that’s not just inconvenient — it’s a major safety issue. However, with the right technology, the automotive world can “close’” these urban canyons, explains Manuel Del Castillo, vice president of business development at Focal Point Positioning.
On open roads with a clear view of the sky, satellite navigation can be remarkably accurate. Signals from multiple GNSS constellations reach the vehicle’s receiver unimpeded, helping calculate position with impressive accuracy. However, this often isn’t the case in dense urban areas.
Tall glass buildings, narrow streets, concrete bridges and overpasses all form urban canyons — and can be a barrier to even the most sophisticated navigation systems.
The Challenge
In cities and other urban environments, there are two common challenges for GNSS performance. The first is multipath interference, which occurs when signals bounce off buildings, glass façades and even parked cars before reaching the receiver. Rather than receiving one clean signal from the satellite, the receiver gets a clean signal and several delayed copies, leading to erroneous positioning estimates.
Signal occlusion is another issue, which occurs when tall buildings and structures physically block some satellite signals from view. The signals that are actually received from that satellite are reflections. This makes it difficult for the receiver to lock onto a stable fix.
In practice, both issues can cause sudden anomalies — enough to place a car on the wrong street entirely. For drivers, this is frustrating. For autonomous systems, it’s a safety risk.
The Road to Autonomy
Urban GNSS challenges aren’t new — taxi drivers in London and New York have long experienced their navigation systems getting “lost” among the towers. However, positioning accuracy is now more important than ever as automotive technology evolves and we hand over more control to our vehicles.
Advanced driver assistance systems (ADAS) are now pushing the limits of conventional GNSS. Features such as lane-keeping, automated lane changes and intelligent speed adaptation all rely on knowing the vehicle’s exact position – not just the road it’s on, but which lane.
As we move further towards autonomous driving, the stakes will be even higher. If GNSS references are unreliable, this could cause serious errors on the road. A sudden position jump in the middle of a complex urban manoeuvre is more than inconvenient — it’s dangerous.
Closing the Canyon
If autonomous cars are to drive safely and reliably in urban environments, GNSS must evolve. The answer lies in rethinking how satellite signals are processed — and in tackling the root causes of error. Traditional receivers rely heavily on hardware-based processing, meaning they integrate new technologies at a slow pace.
To help overcome this challenge, we developed S-GNSS Auto — software that enhances GNSS receiver reliability and accuracy in autonomous vehicles. Delivered as a simple firmware upgrade, it transforms GNSS into a more powerful component of the ADAS stack in areas where traditional solutions fall short.
We recently integrated S-GNSS Auto onto STMicroelectronics’ Teseo GNSS devices, and tested the impact of the joint solution in some of the most challenging urban environments: Shinjuku in Tokyo, and Frankfurt and the Black Forest in Germany. The combined solution demonstrated an improvement in measurement accuracy by up to four times and position accuracy by up to three times in the challenging sections of these environments. By ignoring reflected or non-line-of-sight signals, S-GNSS Auto can also reject potential spoofing attacks, enhancing the security of the GNSS receiver.
McKinsey reports that 12% to 20% of cars could have advanced autonomous driving capabilities by 2030. For automakers, this means expanding the roads and environments that can safely support these capabilities. S-GNSS® Auto helps make that possible by improving GNSS reliability and laying the foundation for advanced vehicle-to-everything (V2X) and ADAS technologies needed to support autonomous vehicle safety in challenging urban areas. Working directly from the chip, it provides a cost-effective and accessible way for automotive OEMs to upgrade their technology via a firmware upgrade.
To see the impact of the integrated S-GNSS Auto and Teseo solution, download the latest data from our trials in Japan and Germany here.
This article is contributed by Focal Point Positioning.
Question: What are the main challenges facing GNSS/GPS-based autonomous solutions in terms of signal integrity, jamming and spoofing, and how are these being addressed?
Answer: Outside of the military, interference is the most common threat to GNSS, with the dominant source being cellular transmission harmonics. It is commonly addressed with out-of-band filters. Non-terrestrial networks (NTN), like Global Star uplink at 1.6 GHz, are gaining traction in more mobile and wearable devices to fill gaps in cellular availability. However, it can create coexistence issues for devices for concurrent L1 GNSS reception during NTN uplink.
In military cases, while intentional interference is effective, the increasing number of GNSS bands to cover requires more transmission power. Modernized GNSS signals with wider bandwidth signals require more jamming power, which risks detection by radiofrequency emission satellite systems such as Hawkeye 360. The frequency of spoofing events will likely continue to increase and spill over into civilian domains.
Thanks to the increasing number of test ranges being made available to commercial GNSS developers, anti-spoofing technology is making some gains, at least in the high-end systems used for autonomous GNSS.
Q: What are the most impactful use cases and sectors benefiting from recent advancements in autonomous solutions?
A: Ride sharing and transport are the likely winners in exploiting the cost savings of driverless systems with autonomous navigation. The past 15 years’ investments in the development of augmented navigation systems — mainly lidar and vision-based — are finally paying off as we see Waymo in service, and soon Uber and Tesla in commercial deployments. Still, these systems depend solely on GNSS as the absolute positioning system, used for navigation in non-urban environments, but also fallback in certain cases where the sensors are problematic, as well as system calibration.
Agriculture, being one of the first segments to exploit autonomous solutions, can still see incremental gains as GNSS corrections systems move RTK from local to regional, allowing some monthly service margin improvements. High-precision consumer products like robotic lawn mowers will be enabled with similar infrastructure. Data services are a key part of infrastructure, for communication as well as precision navigation enablement. Companies such as Swift Navigation, Point One Navigation and RxN networks are expanding their networks and competing with the likes of Trimble and Hexagon.
A 2019 RAND report for the U.S. Navy concluded that autonomy could still be in the distant future. The Navy should take care that a number of claimed autonomy applications could be more aspirational than practical, the report stated, with the applications nowhere near to operational capability. The authors wrote that huge investments may be required to achieve autonomous naval weapon systems, not only in autonomy.
Around the world in recent years, most armed forces and many advanced technology companies, along with government agencies, have been investing in AI and automation. Perhaps now, just six years later in 2025, we already are looking foward to unmanned vehicles that display not just fundamental autonomy, but also quite advanced “auto-capability.”
In the world’s water
The U.S. Navy (USN) has been operating a number of unmanned surface vessels (USV) over the past several years. In a 2023/2024 Pacific Fleet exercise, four USV models (Sea Hunter, Sea Hawk, Mariner and Ranger) were mostly operated autonomously. Ranger has a small bridge manned only for harbor maneuvers.
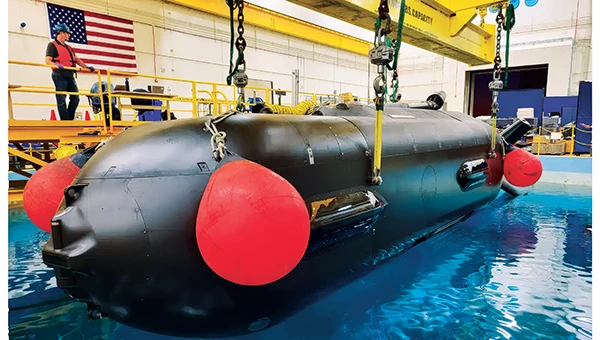
An Orca extra large UUV (XLUUV) is tested in a tank. With a range of 6,500 nautical miles, the submarine can perform long missions. Its navigation system features a Kalman-filtered inertial unit supported by Doppler velocity logs and depth sensors. Photo: Boeing
The USN has unmanned autonomy programs for large, small and underwater vehicles. The Orca submarine program is slated to consist of five 51-foot-long vehicles, and includes variants fitted with an added 30-foot payload section. To operate for several months underwater, it is likely that a similar degree of autonomy has been incorporated. ORCA surfaces regularly and can be given new routing if required.
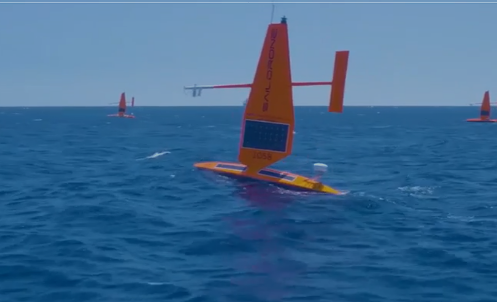
Saildrone’s autonomous research vessel (Photo: Saildrone)
Other types of vessels collect ocean and seafloor data. The environmentally friendly Saildrone can operate independently — we could say autonomously — for more than a year. The Saildrone company, based in Alameda, California, contracts out its USVs, providing its technology to agencies and governments and taking on the risks of ocean surveying to acquire valuable data. Saidrones are equipped with satellite communications, GNSS navigation, weather sensors and sub-surface sensors.
Wheels on the road
Autonomy applications on land are dominated by commercial self-driving cars, Tesla being the leading manufacturer in the U.S. However, full autonomy is still a considerable way from being ready. At the full-autonomy level, known as Level 6 in the auto industry, the vehicle does all the driving, including obstacle avoidance, under all conditions, without any geographic limitation. Nevertheless, we appear to have progressed from basic manual control (Level 0) to somewhere around Level 3, where the vehicle is largely aware of its environment, and does most of the driving. Even so, human monitoring and control are still required.
Tesla’s autopilot technology in its Model S and Model X electric vehicles could be referred to as an advanced driver assistance system — or as Tesla calls it, “Full Self-Driving (Supervised)” — and is reported to handle emergency steering and braking, autonomous steering, lane changing, vehicle following, curve negotiation, and automatic parking. Autopilot sensor inputs are provided by 12 ultrasonic sensors and eight cameras providing a 360° field of view.
Tesla Autopilot intelligence can identify more than 250 traffic signs 50 countries, including turn signs and speed limits. It can identify and interpret traffic lights and road markings, and decide what to do when coming across things such as traffic cones and pedestrians.
Nevertheless, Tesla’s have been involved in quite a few accidents, the cause of which has been analyzed to be mostly a lack of driver attention (supervision), and in a number of cases, a failure of the autonomous system to recognize unusual road conditions.
Another company, Leo Drive, specializes in providing scalable software and hardware solutions, offering an end-to-end, one-stop service for integration of autonomous systems. Its mission is to make autonomous technology more accessible and widely adopted across various industries.
For its autonomous test vehicle, Leo Drive is using the Ellipse-D, a dual-antenna RTK inertial navigation system (INS) from SBG Systems. The company chose the Ellipse-D for its accuracy, reliability, and advanced features — all essential for autonomous vehicle development and testing. The Ellipse-D INS was integrated into Leo Drive’s, a passenger car converted for autonomous operations.
Oshkosh Defense integrated autonomous technology onto Palletized Load System vehicles as part of the Expedient Leader Follower program. Photo: Oshkosh Defense
The U.S. Army has been using automation in its weapon systems for some time. How much autonomous behavior, of which these systems are truly capable, may be difficult to determine. The General Atomics Reaper unmanned aerial vehicle (UAV) is largely controlled over long-distance satellite links by operators in control stations. It’s possible that the same set up is true of most of the Army’s automated weapons — probably motivated by the need to avoid systems independently determining their own targets and firing without human confirmation.
It’s difficult to determine just what army programs are underway, other than to acknowledge that programs have been launched in the past. There doesn’t appear to be any open, clear indication of the degree of autonomy to be included. A couple of programs have produced at least visible hardware, but how much or little human control is involved is unclear.
Taking flight
Up in the air, new autonomy contender Mayman Aerospace is offering the Razor, a jet-powered vertical take-off and landing (VTOL) UAV. Development of Razor is funded by private investment and U.S. Department of Defense contracts.
The RAZOR VTOL with gimbled jet pods passed tests at a military base in California in September 2024. Photo: Mayman Aerospace
Razor is imbued with a degree of AI that enables autonomous decision-making, as well as navigation. Its autonomous AI brain — the SkyField flight-control system — navigates independently in a GPS-denied environment, possibly involving ground beacons and eventually integrating with battlefield management systems. With a 5- to 6-foot-long airframe and sculpted shape, the aircraft presents a low radar cross section and has a degree of stealth to assist in the penetration of enemy defenses. Its top speed of 500 mph provides new options for both military and commercial applications, according to Mayman.
Razor also can aid disaster recovery, rescue operations, and the delivery of urgently needed life-saving cargo.
Many VTOL unmanned aircraft have struggled with the transition from vertical to horizontal flight. On its first vertical lift-off and climb-out on four jet engines, Razor paused briefly at altitude. Then its jet pods tilted slightly toward horizontal before the aircraft went directly into horizontal flight. An earlier flying testbed may have assisted the development of transition software, perhaps with a boost from machine learning.
Designed for deliveries, the EHang 216 heavy cargo, 16-rotor unmanned aircraft can carry a payload of 551 pounds over almost 22 miles with a top speed of 80 mph, according to the EHang company. The UAV is fully autonomously operated while being monitored over a 4G/5G data link at a manned control center. The system has an automatic fail-safe mode in which the UAV will return to base if the communications link goes down or if battery power drops too low.
EHang also uses a redundant design, with two GPS receivers and double rotors, ensuring a low likelihood of failure during a delivery run.
More In development
So while land vehicle autonomy is moving forward — with Tesla cars and Army vehicles that apparently can take control with close human monitoring — we still have some distance to go to achieve fully independent autonomous behavior on the road.
The Ehang 216 heavy-cargo UAV EHang 216L is designed for deliveries, including life-saving ones. Photo: Ehang video screenshot
Autonomous applications on the sea are more common, with U.S. Navy applications showing substantial progress. Still, precise navigation in crowded harbors remains under human control. Humans are still watching and monitoring, ready to intervene should military or commercial UAV applications make untoward execution errors.
We will continue to follow developments of significant autonomy programs such as the U.S. Air Force Collaborative Combat Aircraft (CCA), a new type of uncrewed weapon system. The CCA and other programs are maintaining high investment levels, so it’s possible that we may see full autonomy fielded quite soon. Perhaps then our belief in its capability will become fully justified.
Teledyne Marine has launched the Teledyne Compact Navigator, an ultra-compact autonomous integrated navigation system engineered for subsea and surface vehicles. It is ideal for small vehicles, enabling inspection and survey operations on compact platforms. The system is offered in two depth-rated models, one capable of operating at 4,000 m and another at 300 m. The Compact Navigator consumes less than seven watts of power, extending mission duration by conserving energy. The system operates fully autonomously, eliminating the need for external aiding or operator intervention. Advanced phased array Doppler Velocity Log (DVL) technology enhances performance while allowing the device to be mounted on an autonomous underwater vehicle or ship hull.
Compact Navigator supports a broad range of applications, including ROVs, AUVs, shallow water surface navigation, operations in GNSS-denied environments and dynamic positioning for surface vehicles. The system provides true North-seeking gyrocompass-grade performance, and its web-based user interface supports integration, operation, and troubleshooting. It is factory-calibrated and offers a battery backup option for reliability in demanding conditions. The system operates independently of satellite signals, making it resistant to jamming or signal loss. This capability is significant for shallow water navigation, where GNSS-based systems may be unreliable.
Saildrone has equipped its Voyager platform with new hardware and software algorithms, allowing it to operate in areas affected by GPS jamming and spoofing.
The company successfully demonstrated these capabilities in the Middle East, showcasing its ability to function autonomously in GPS-denied environments. According to Saildrone, the tests addressed challenges posed by regional electronic warfare tactics, such as jamming and spoofing, which have disrupted unmanned systems in contested maritime zones.
Task Force 59, established by the U.S. Navy in 2021 under NAVCENT and the Fifth Fleet, has been instrumental in integrating unmanned systems and artificial intelligence into fleet operations. Saildrone engineers developed a localization solution that does not rely solely on satellite navigation, offering seamless operation even in denied environments. This capability was demonstrated during IMX 2025, where Saildrone’s Voyager platform stood out as the sole unmanned vessel capable of persistent surveillance under such conditions.
Saildrone USVs are actively conducting wide-area surveillance across the CENTCOM area of responsibility, enhancing maritime domain awareness and supporting U.S. Navy operations. These efforts align with Operation Prosperity Guardian, which has been safeguarding commercial shipping and countering regional threats since December 2023.
Saildrone is now in its fourth year of collaboration with the U.S. Navy, with its unmanned surface vehicles deployed across various regions, including the Middle East, Atlantic, Caribbean and Pacific Oceans.
GNSS researchers presented hundreds of papers at the 2024 Institute of Navigation (ION) GNSS+ conference, which took place Sept. 16-20 in Baltimore. The following papers focus on high-accuracy positioning for autonomous vehicles in various environments. The papers are available here.
High-accuracy and resilient GNSS receiver for autonomous vehicles
The G3STAR GNSS receiver, a key component of the GAMMS Horizon 2020 project, is designed to improve high-definition navigation map production for autonomous vehicles. This Galileo-based receiver leverages the constellation’s Open Service features, including the High Accuracy Service (HAS) and Navigation Message Authentication (OSNMA). The research team shared that G3STAR’s ability to obtain and decode HAS messages from Galileo E6-B signals, as well as to process OSNMA bits from live Galileo E1-B I/NAV messages, demonstrates its advanced capabilities in providing secure and precise navigation data.
Preliminary tests highlight G3STAR’s proficiency in utilizing Galileo’s new services. However, the research team shared that further evaluation is necessary to fully assess its impact within the GAMMS project. Plans include validating the HAS data’s effect on navigation accuracy, conducting field tests to evaluate OSNMA availability in various environments and assessing the influence of the Chip Scale Atomic Clock on receiver performance. Additionally, comparing the G3STAR’s performance to commercial off-the-shelf receivers will be crucial in determining its overall contribution to the GAMMS navigation system and HD map generation. These evaluations will be carried out during upcoming test campaigns, providing valuable insights into G3STAR’s potential to advance autonomous vehicle navigation.
Filipe Carvalho, Ricardo Prata, Bruno Cardeira, Carlota Cardoso, Rui Nunes and António Fernández; “High-Accuracy and Resilient GNSS Receiver for an Autonomous Vehicle.”
GNSS/INS positioning software library
The autonomous vehicle industry has seen significant interest and investment throughout the past 15 years, with numerous practical applications emerging in the market. However, the technology for functionally safe GNSS/INS localization in autonomous vehicles is still not fully established. This gap is particularly crucial in safety-critical applications, where positioning algorithms must be robust against potential faults, especially in challenging environments. This paper highlights Hexagon’s Safety-Critical Positioning Solution, which addresses this need by providing both precision and safety for autonomous land vehicles.
The Positioning System is a safety-first software library that integrates GNSS signals, state space corrections from the TerraStar-X Enterprise service, inertial measurement units (IMUs) and additional vehicle sensors. This system employs an extension of Receiver Autonomous Integrity Monitoring techniques, originally developed for the aviation industry. It computes multiple navigation solutions using a solution separation technique, including an “all-in-view” solution and several subset solutions that exclude various fault hypotheses. These solutions are used to calculate Protection Levels (PLs), which provide an estimated upper bound on positioning errors, accounting for systematic biases and measurement faults. The PLs can be compared against alert limits to determine whether the navigation solution is sufficiently accurate for autonomous decision-making.
Eduardo Infante, Rudi Gaum and Laura Norman; “Demonstration of a Functionally Safe GNSS/INS Positioning Software Library for Autonomous Land Vehicles.”
Unmanned ground vehicles in off-road environments
This paper explores the emerging potential of radar for localization in GNSS-denied scenarios, particularly in challenging off-road environments where lidar-based systems struggle. The research focuses on two distinct settings: a dense forest and an underground mine. To address the localization challenges in these environments, the team developed a pipeline that combines an adaptive extended Kalman filter (EKF) for unstructured forested regions with a factor graph approach that fuses EKF estimates and point-to-plane radar iterative closest point (ICP) measurements for structured underground environments. The results demonstrate significant improvements in localization accuracy compared to existing methods, with the adaptive EKF proving particularly effective in forested areas.
The study provides valuable insights into the integration of radar and IMU data for vehicle localization in GPS-denied scenarios. While the adaptive EKF outperformed conventional EKF in structured outdoor settings, the standard EKF showed better performance in the highly dynamic conditions of the underground mine. The factor graph approach exhibited improved tracking performance, especially in reducing lateral drift along straight trajectory segments. The research also highlights the importance of selecting high-quality ICP registrations for radar-based SLAM. These findings pave the way for future research directions, including refining adaptive EKF for varied environments, exploring radar-based navigation on feature-sparse roads and enhancing the factor graph framework to incorporate additional sensor modalities.
Petar Mitrev and Mohamed Atia, “Radar-Inertial Localization for Unmanned Ground Vehicles in GNSS-Denied Off-Road Environments.”
GNSS plays a vital role in autonomous systems, providing essential positioning, velocity and timing (PVT) information for platforms such as autonomous vehicles, UAVs and ships. However, GNSS vulnerability to spoofing attacks poses significant security risks, potentially disrupting decision-making processes in these systems. To address this issue, researchers have developed a novel approach called Clock Drift Monitoring (CDM) for detecting GNSS spoofing in autonomous vehicles. Unlike previous methods that focused on directly detecting Doppler bias from measurements, CDM indirectly monitors the adverse impact of Doppler bias on the PVT solution, overcoming challenges associated with bias extraction from raw measurements.
The CDM technique exploits user clock drift derived from Doppler positioning as a detection metric. Under normal conditions with authentic GNSS signals, the clock drift remains stable, reflecting the user’s frequency source stability. However, spoofing conditions introduce counterfeit signals with consistent Doppler bias across all measurements, resulting in abnormal clock drift variations. A Generalized Likelihood Ratio Test-based detector identifies these variations, offering a practical and flexible method for GNSS spoofing detection. Field tests have validated the CDM technique’s effectiveness in real-world scenarios, demonstrating its robustness as a solution for autonomous vehicles to counter emerging cyber threats. This method’s ease of implementation, broader applicability and inherent robustness make it a promising approach for safeguarding autonomous systems against counterfeit GNSS signals.
Ziheng Zhou, Hong Li, Yimin Deng and Mingquan Lu Tsinghua; “Clock Drift Monitoring Based GNSS Spoofing Detection Method for Autonomous Vehicles.”
“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
Autonomous vessel completes sea trials in Norway
Photo: Kongsberg Maritime
The Reach Remote 1, an uncrewed surface vessel developed by Reach Subsea in partnership with Kongsberg Maritime and Massterly, has been officially delivered after extensive sea trials overseen by Det Norske Veritas and the Norwegian Maritime Authority. This 24 m vessel is equipped with advanced hull-mounted survey sensors and a Work Class Electric ROV, designed to enhance subsea operations by improving efficiency, safety and environmental sustainability.
ESA in search of very low-Earth orbit technologies
Photo: VLEO
The European Space Agency (ESA) is seeking innovative space application ideas for very low-Earth orbit (VLEO), an orbital region between 100 km and 450 km. This initiative aims to explore new frontiers in space technology by soliciting creative solutions from researchers and innovators. ESA said VLEO presents several advantages, including reduced launch costs, enhanced Earth observation capabilities and a more harmless radiation environment. ESA is particularly interested in proposals addressing technological challenges specific to this orbital regime, such as atmospheric drag mitigation, advanced propulsion techniques and specialized satellite designs.
Car tracking leads to successful arrest
Photo: StarChase
The Pinole, Calif., Police Department utilized the StarChase GPS-based tracking system to safely apprehend suspects in a stolen vehicle. Instead of engaging in a dangerous high-speed chase, officers launched a GPS-enabled tracker that stuck to the vehicle, offering real-time location tracking. The Pinhole Police Department told The Richmond Standard, “This operation highlights how technology and collaboration keep our community safe — by reducing the dangers of high-speed pursuits while ensuring accountability and swift action.”
3D mapping of New Zealand coastline
Photo: nazar_ab / E+ / Getty Images
New Zealand has launched a coastal mapping project to help communities understand and mitigate climate change impacts. Led by Toitū Te Whenua Land Information New Zealand, the initiative will use lidar technology to create detailed 3D maps of up to 40% of the country’s coastline throughout three years. The $30.2 million project involves mapping 4,780 square km of coastal and seafloor terrain using specially equipped planes with high-resolution scanning equipment. Two suppliers, Woolpert NZ and NV5 Geospatial, will conduct the mapping across the North and South Islands, beginning in regions such as the Bay of Plenty and Invercargill.