Phone users can now be located by emergency responders within one floor level inside multi-story buildings
Polaris Wireless, an innovator of high-accuracy software-based wireless location solutions, announces the company’s Z-axis location solution is commercially available nationwide.
The technology — demonstrated to meet the 3-meter vertical location accuracy requirement of the Federal Communications Commission (FCC) — is integrated into Schok Gear’s newly released flip phones.
Schok’s flip phones are typically used by consumers looking for a simple, yet powerful flip phone, that can now be accurately located in emergencies. Adding indoor and vertical location to these devices enables first responders to locate all wireless 911 callers with floor-level accuracy in multi-story buildings.
“This is a major milestone for the 911 industry to deliver FCC-compliant Z-axis emergency location technology for users of feature phones” said Manlio Allegra, CEO and Founder of Polaris Wireless. “Working with Schok and their partners has been straightforward and it’s exciting to see for the first time the complete Z-axis solution commercially available in a flip phone.”
“The Polaris Wireless location software was seamlessly integrated with our existing location and chipset vendors” said Samuel Gutiérrez, chairman and CEO, Schok, LLC. “Our Schok flip feature phone passed Tier I carrier acceptance testing, which for the first time included Z-axis location. Now our customers can be assured their accurate vertical location will enable first responders to find them faster in an emergency.”
The vertical component of wireless location is critical in today’s environment when most 911 calls are placed by mobile phones and increasingly indoors, where location determination is particularly challenging. Accurate indoor wireless location is a game-changer for first responders to quickly get to where they are needed, regardless of the phone being used by callers. The Polaris Wireless Z-axis service is available seamlessly nationwide for public safety and commercial deployments.
Fugro’s Blue Prism USV will have greater endurance, improved weather resilience and ultra-low carbon emissions. (Image: Fugro)
Fugro has signed a contract with Kooiman Engineering and Van Oossanen Naval Architects for the naval design of Blue Prism, Fugro’s next generation of unmanned surface vessels (USVs).
Engineered for both coastal and offshore operations, the Blue Prism will combine an ultra-low carbon footprint with high-quality data collection, weather resilience and endurance characteristics, Fugro explained in a press release.
Available in 2023, Fugro’s Blue Prism will acquire high-accuracy bathymetry and sub-bottom data using hull-mounted sensors, while also having the ability to tow multiple geophysical sensors. It will also be capable of beyond-visual-line-of-sight operations.
Together with Fugro’s smart data-management software, the speed and endurance of the Blue Prism will reduce risk and accelerate project delivery in offshore wind, hydrographic charting and coastal resilience.
“To re-think the design and layout of a vessel without a crew is a dream come true for a naval architect,” said Perry van Oossanen, managing director and naval architect at Van Oossanen Naval Architects. “We are thrilled to be part of this exciting project in which the best techniques in Dutch ship building are combined in this new uncrewed ultra-efficient vessel.”
“The collaboration between Kooiman and Van Oossanen has already led to innovative solutions, and we are pleased to be able to help Fugro take the next step in uncrewed vessels,” said Maarten Kooiman, director of Kooiman Engineering.
By Xavier Leblan and Giuseppe Rotondo, GUIDE-GNSS, Toulouse, France Miguel Ortiz, Université Gustave Eiffel, Nantes, France and Christelle Dulery,CNES (French Space Agency), Toulouse, France
Geolocation errors, degraded signal and environmental masking
In a perfect world, the positions calculated by trilateration using the signals transmitted by GNSS satellites would always be accurate to within a few centimeters. Unfortunately, in addition to the intrinsic quality of the receivers, many factors alter the measurements made by a GNSS receiver and degrade the final geolocation data.
To begin with, the GNSS system itself suffers from multiple imperfections including so-called “global” errors. For this reason, the satellite navigation system is complemented with the broadcasting of assistance messages to increase the performance of receivers compatible with SBAS systems, such as EGNOS for the European continent.
In addition, for terrestrial applications, the satellite signals are affected by several phenomena caused by the immediate surroundings of the receiving antenna. These are the so-called “local” errors, such as terrain, bridges, infrastructures, vegetation and interference of any type. Depending on the areas covered, the trajectories calculated by the terminals deviate more or less from that actually taken by the vehicle (antenna), i.e. the “reference trajectory,” also called “ground truth.”
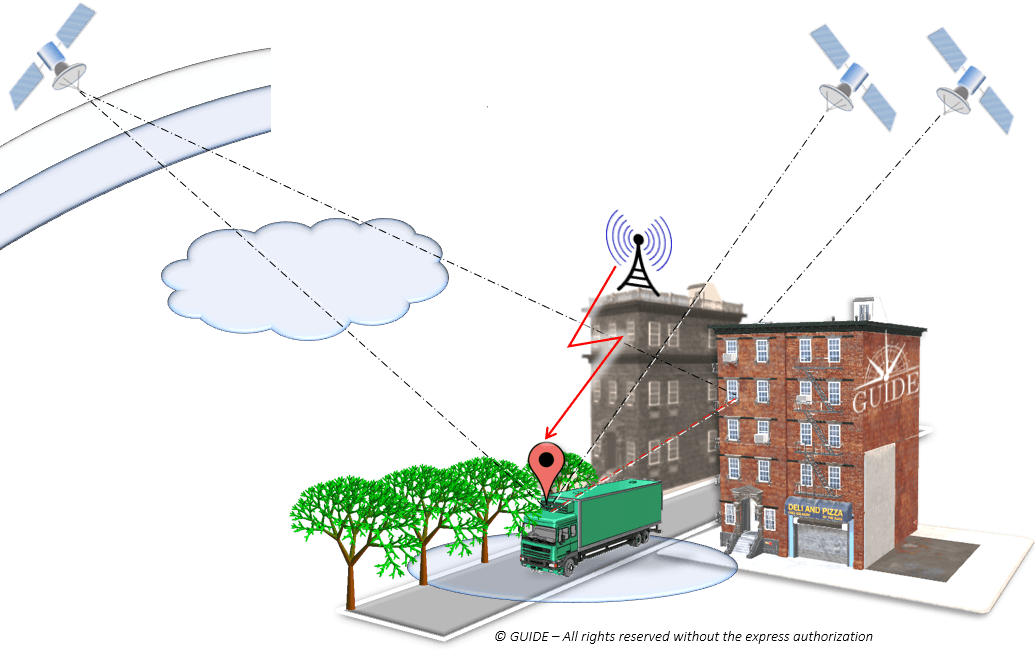
Figure 1. Sources of error in urban geolocation. (Image: GNSS-GUIDE)
Sources of error in urban geolocation include:
Global errors
Orbits and clocks
Satellite geometries
Ionosphere, troposphere
Local errors
Obstruction, attenuation
Multipath and diffraction
Interference, jamming, spoofing
Terminal errors
Receiving chain
Algorithms and services
Navigation sensors
Classification of position errors
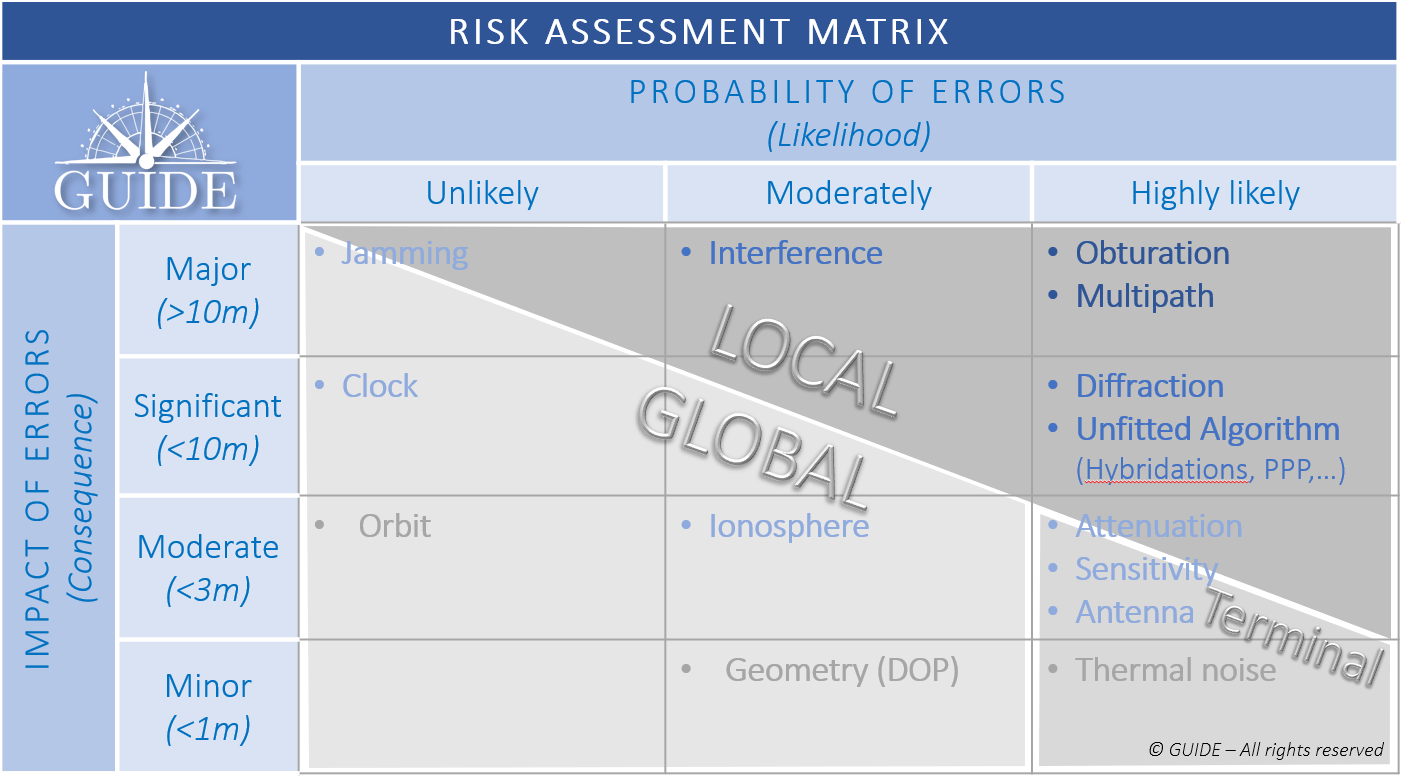
To study those phenomena having the greatest impact and likely to be the most frequent, the different types of errors are displayed as a risk matrix. As the “global” errors can be considered to be handled by the regional SBAS system, the pre-eminence of the so-called “local” errors should be addressed.
Figure 2. GNSS Risk Matrix. (Image: Authors)
Description of the main sources of local errors
To observe the effects of local phenomena on the propagation of signals, a dozen identical receivers — with the same configuration and sharing the same antenna — were mounted on a vehicle and driven through urban and peri-urban areas.
We focus on four particularly impacting phenomena to visualize the trajectories calculated by the receivers.
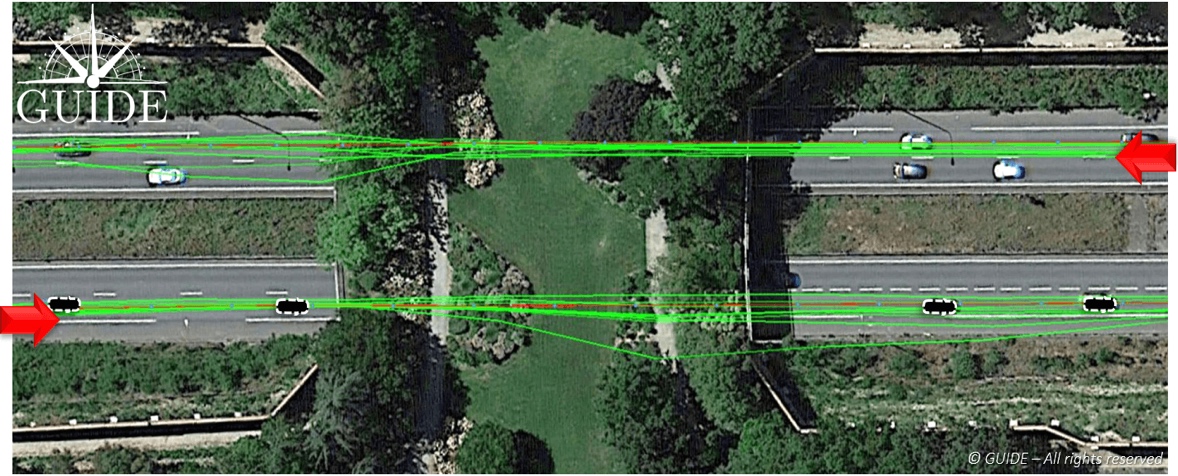
Positioning errors due to bridges
In the picture, below, the test vehicle passes under a bridge in both directions. In both cases, the trajectories diverge under the bridge and converge further on. Here it is easy to understand the shortcomings of results based on a single pass, in other words based on a single measurement.
Figure 3. Effect of alteration of GNSS signals on receivers passing under a bridge. (Image: Auhors)
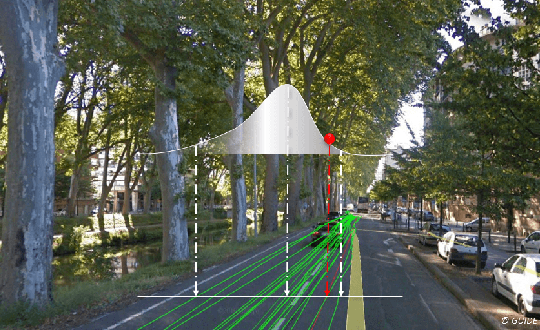
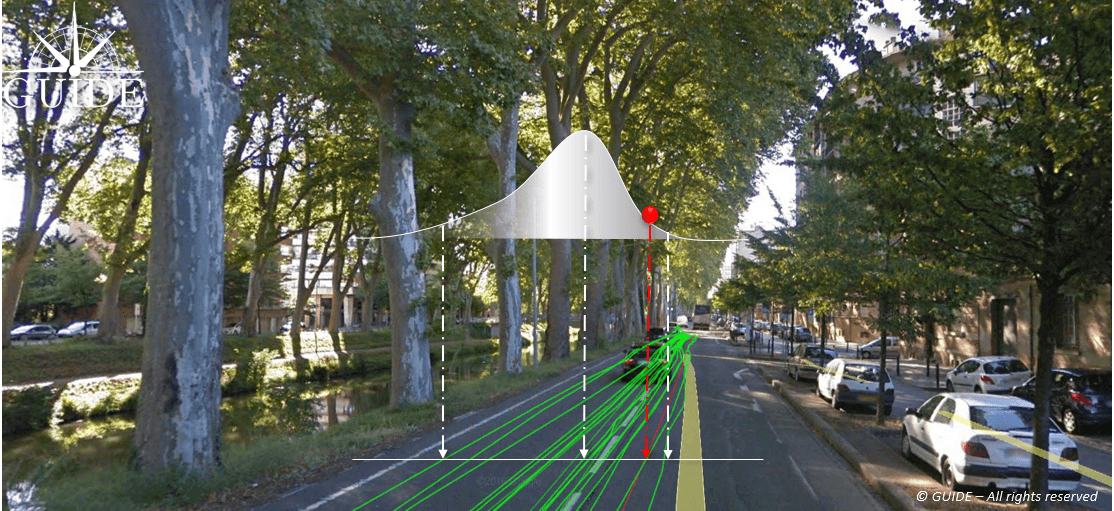
Positioning errors due to vegetation
In the image below, the test vehicle is on an avenue lined by trees whose branches and canopy cover the road. The foliage attenuates and, more importantly, diffracts the radio waves arriving from the satellites, thus degrading signal reception. This results in dispersed trajectories. Each receiver provides a different measurement. Note that due to the proximity of buildings, the center of the position distribution, in the presence of multipath, deviates slightly from the reference trajectory.
Figure 4. Effect of diffraction of GNSS signals on receivers passing under tree canopies. (Image: Authors)
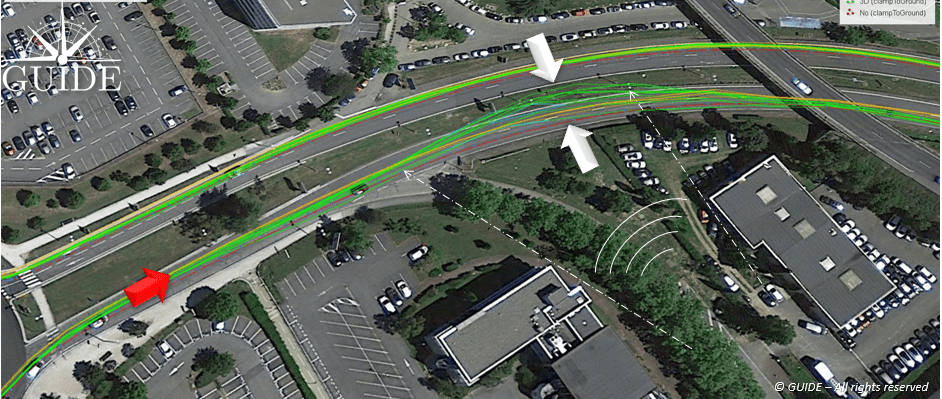
Positioning errors due to buildings
In the composite image (in order to show the main building) below, all the receiver trajectories are deviated towards the building alongside the avenue. The situation highlights the consequences of a phenomenon called “multipath.” When a receiver captures reflected waves, the signal propagation time — used to calculate the pseudoranges — is increased and the accuracy of the end position is degraded. This effect is well known and easily observable during static measurements.
Figure 5. Effects of GNSS signal propagation on receivers near a building. (Image: Authors)
Positioning errors due to interferences
In the image below, the on-board receivers have been disturbed by “transitory” interference. On the outward journey, twenty minutes earlier, no problem had been detected for the trajectories on the other side of the expressway.
On the return journey, this unidentified interference degrades the accuracy of the receivers with a visible dispersion of the trajectories. In other situations, intentional or unintentional interference could completely block out the GNSS band preventing any position measurement.
In this case, the source of the interference seems to come from the bottom right, guided by the two parallel buildings.
Figure 6. Effect of unidentified temporary interference on signals for GNSS receiver. (Image: Authors)
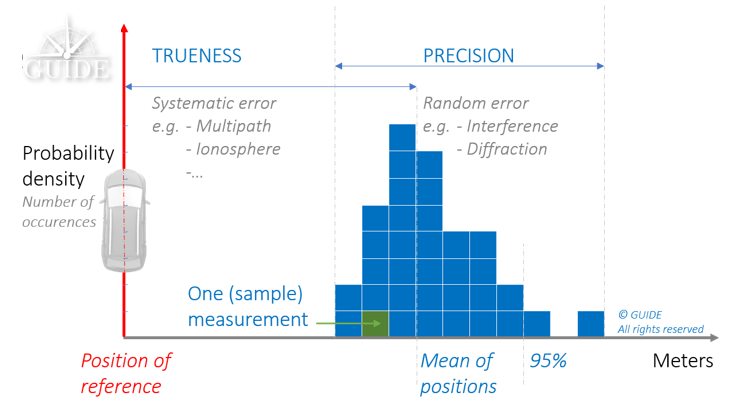
Trueness and precision of position measurements
Receivers of the same batch behave differently depending on the environment. For a predominantly multipath situation, they all converge to the same wrong position. On the other hand, when the propagation phenomena become more complex with multiple diffractions, such as reception under foliage, each receiver produces a position with a different error. For complex environments, we have a combination of these two behaviors.
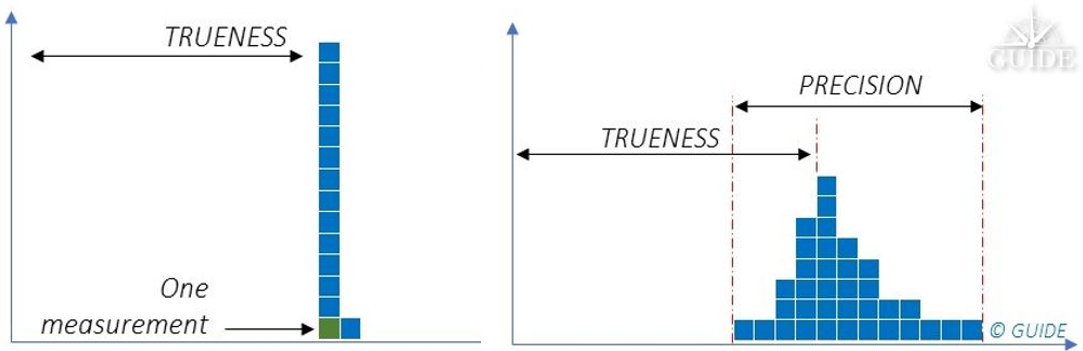
The first behavior is deterministic. Metrology uses the term measurement “trueness,” which stands for “closeness of agreement between the average of an infinite number of replicated measured values and a reference value.”
The second behavior is non-deterministic. In this case, metrology uses the term measurement “precision,” which stands for “closeness of agreement between indications or measured values obtained by replicated measurements on the same or similar objects under specified conditions.”
Terrestrial applications often offer a varied mix of environments where “trueness” and “precision” errors accumulate. It is essential to consider both components in order to characterize and study GNSS receiver performance.
Statistic distribution of the different positioning errors:
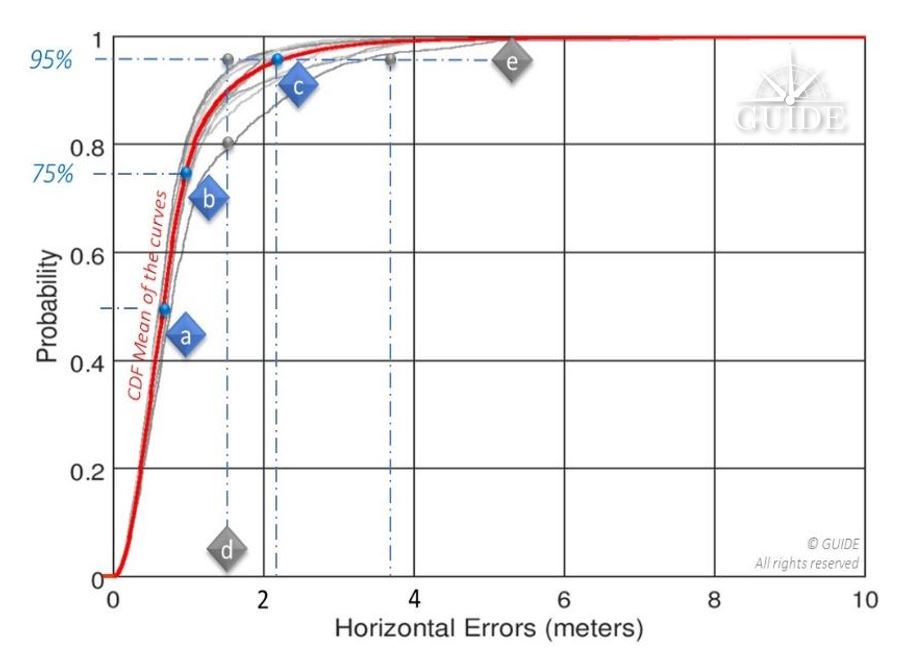
Figure 7. Combination of deterministic and non-deterministic errors. (Image: Authors)Figure 8. A single position measurement at a point has two unknowns: The weight of deterministic (trueness) errors compared to those that are not (precision). (Image: Authors)Figure 9. Statistical distributions of errors for a trajectory (scenario), that is the percentage of all errors (probability) lying beneath a given accuracy level. (Image: Authors)
Above, 95% of the positions calculated during a replay have an accuracy better than 1.5m; this same value is only reached with ~80% of the positions calculated during another replay — see vertical line [d]. The horizontal line [e] illustrates the spread of the horizontal position by considering 95% of the positions of two replays: for one the displayed accuracy is ~ 1.5m and for the other it is degraded to 3.5 m. This curve will always point to the same reference points [a], [b] and [c] recommended by the standard EN16803-1 and corresponds to the percentage of measurements respectively less than 50%, 75% and 95%.
By way of example, the evaluation of a single receiver on board a vehicle travelling in an urban environment does not allow separation of these two components. Indeed, signal degradation determines the degree of dispersion of the “random” component of the measurements. Thus, in certain environments, each additional receiver will produce a different result. However, the analyses of a single onsite campaign relies on just one single sample (single trajectory of the terminal under test), where a panel of measurements is essential. In fact, the available statistics prove insufficient to characterize a receiver, even at the cost of doing long runs.
Figure 10. Visualization of the combined deterministic and non-deterministic errors. (Image: Authors)
Live testing is therefore rather intended for final integration.
On the other hand, a constellation generator will synthesize ideal signals derived from mathematical models, and, in any case, not representative of the real environment. The measurements will then only be deterministic, that is, subject to “systematic” errors. Repeated simulations on the same receiver will always produce the same measurements. Nevertheless, this type of test bench offers many advantages for simulating unobservable situations in the real world.
Disparities in analysis possibilities on position errors based on:
Figure 11. Typical results for repeated measurements obtained, respectively from left to right, with synthetic signals and real-world signals. (Image: Authors)
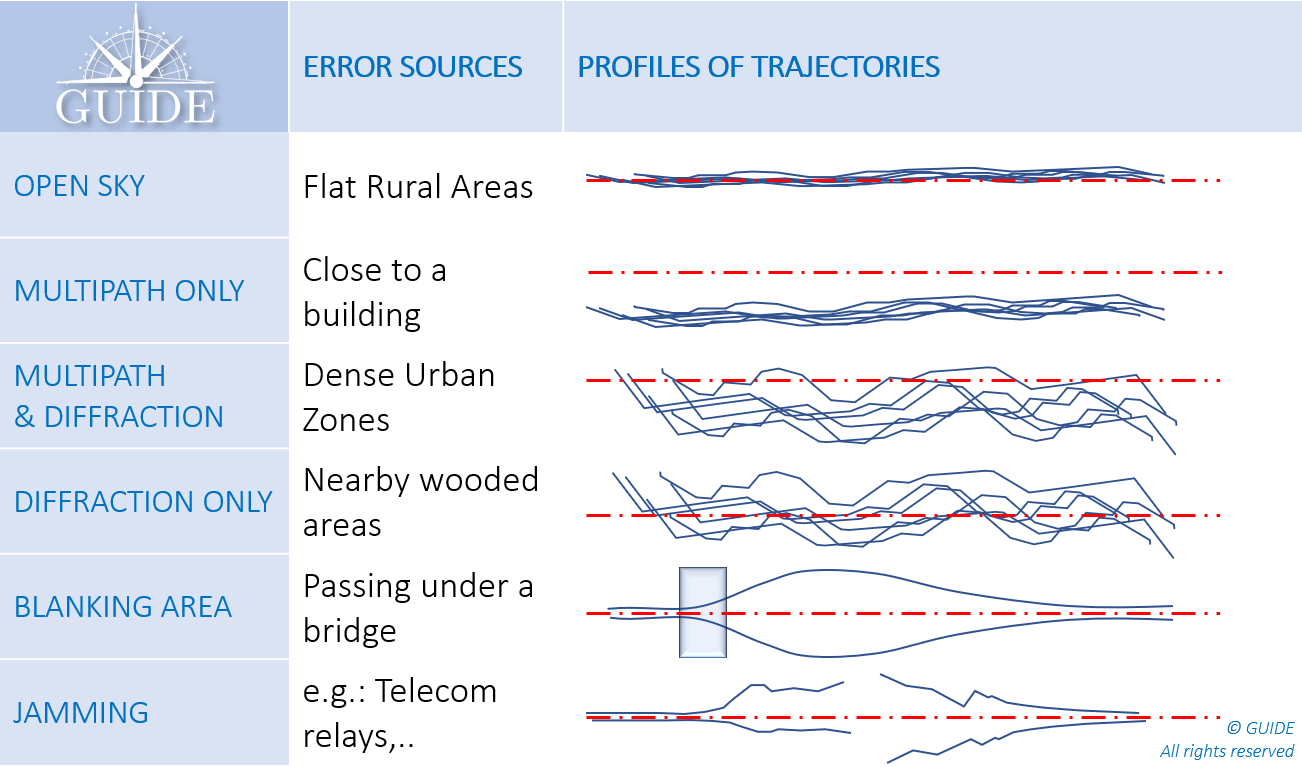
In summary, the main error profiles are described below.
Each situation combines both trueness and precision errors. This latter component requires several runs in the same configuration to determine the potential measurement spread.
Figure 12. Position error profiles (measured trajectories/DUT) depending on the environment. (Image: Authors)
What is GNSS metrology?
As a first approach, characterization of GNSS performance would require many receivers on the same test vehicle. This method is certainly useful in the experimental stage, especially to understand the impact of propagation phenomena on positioning errors. However, it has major disadvantages, both from a logistics point of view and because of the basic metrological requirements.
To obtain reliable and useful measurements, from an operational point of view, the tests must be “representative” of the areas to be covered and “reproducible” to check the results and make valid comparisons, for example, between two receivers, two firmwares, two settings, two antennas and even two hybridizations.
Under these conditions, replay techniques, often referred to as “record and replay,” meet the expected requirements. For the record, this metrology method consists in digitizing the GNSS signals received by the antenna on board the definition vehicle, taking care to collect all the data associated with the tests (VIDEO, INS, DMI, NRTK, …), above all, the ground truth. Thus, at the end of the campaign the GNSS signals and other data are synchronized and restored on a replay bench consisting of an “SDR replayer.”
Replaying the same scenario on a receiver makes it possible to reproduce the recording conditions identically. Each pass generates new measurements, equivalent to using an additional unit, virtually onboard. Compiling the results thus highlights the non-deterministic errors, that is, those which by their random nature emerge from the others.
Test laboratories such as GNSS GUIDE design and market test data that can be replayed directly on the main simulation instruments capable of operating in two modes: simulation and replay. The replay configurations are generally much more affordable than the larger, structurally more complex constellation generators. In addition, the implementation of replay sessions is simple, fast and requires no special training.
In addition to scenarios made on request, the available libraries already cover a multitude of cases, previously inaccessible for an isolated user. They open up the possibility of testing terminals in different latitudes with varied terrain and neighborhoods composed of typical architectures.
Conclusion
The French Space Agency (CNES) has financed several R & D contracts for the development and validation of this replay technique (record and replay). It is already recommended by CEN / CENELEC through the series of EN16803 standards to characterize and classify the performance of GNSS terminals. This methodology complies with the basic principles of metrology.
The test conditions are reproducible and representative of operational conditions. The measurements are repeatable and allow separating the systematic errors (trueness) from the random errors (precision). Measurement uncertainties are also accurately established.
During an on-site measurement campaign, the statistical distributions of two identical receivers on board the same vehicle lead to different results. Thus, no characterization can be established at this stage.
With a replay bench, after several iterations of the same scenario, the average values of the measurements on a CDF tend toward a curve characterizing the performance for that scenario.
Instrumentation dedicated to replay operations is less complex and less expensive. Statistical models of simulations are replaced by scenarios of GNSS signals previously digitized in the field or on constellation generators. Thus, whether they come from a real or synthetic environment, these GNSS signals are easily restored, while drastically reducing the preparation and execution times. The economic benefits of this test technique are now evident and are favoring its adoption by the transportation industries.
References
Niels Joubert, Tyler G.R. Reid, and Fergus Noble (2020), Developments in Modern GNSS and Its Impact on Autonomous Vehicle Architectures
Andrej Tern and Anton Kos (2018), Positioning Performance Assessment of Geodetic, Automotive, and Smartphone GNSS Receivers in Standardized Road Scenarios
Ni Zhu, Juliette Marais, David Betaille, Marion Berbineau (2018), GNSS Position Integrity in Urban Environments
C. Rouch, B. Bonhoure, F.X. Marmet, T. Chapuis, H. Secretan, V. Bienfait, X. Leblan (2016), Measurement campaigns and PVT experiments with new Galileo satellites
B. Calvet, L. Montoya, P. Grandjean, X. Leblan (2015), The GUIDE High-Precision test facility (GNSS laboratory)
G. Duchâteau, X. Leblan, Y. Capelle, W. Vigneau and F. Peyret (2014), Certification of Road User Charging: Approach, standardization and role of laboratories
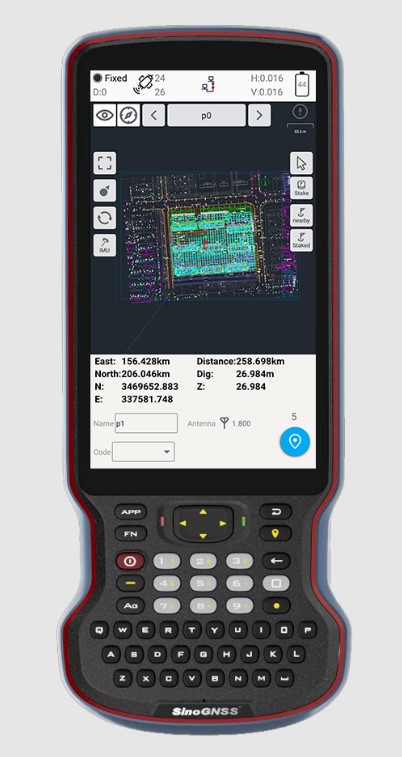
ComNav Technology has introduced its new-generation data collector, the R60. The powerful handheld has an ergonomic design and runs on Android 12 OS, providing a suitable workhorse for surveying professionals in the field.
Survey Master field software works seamlessly on the R60, which features a Qualcomm 8-core processor for massive data processing. Its 64-GB memory allows ample data storage and enables the opening of CAD drawings in seconds. A full QWERTY keyboard speeds up surveying efficiency.
The 9000 mA Li-ion battery provides more than 30 hours of continuous functioning and is fast charging, taking only 5 hours to fully charge with the USB-C interface port.
The 5.5-inch sunlight-readable, high-resolution screen provides a smooth and comfortable experience in outdoors. The IP67 dustproof and waterproof rating protects the R60 from most harsh environments.
The R60 data collector now is available through ComNav Technology authorized local distributors or ComNav Technology directly.
Initiative aims to increase the global coverage, quality and accessibility of seabed mapping data through collaboration and the creation of a more integrated marine geospatial sector
Durdle Door on the beach in Dorset County, United Kingdom. (Photo: Fonrimso/iStock/Getty Images Plus)
The UK Hydrographic Office (UKHO) is inviting UK government organizations involved in seabed mapping who share common interests in optimizing the UK’s national maritime assets to become members of the newly unveiled UK Centre for Seabed Mapping (UK CSM).
UK CSM is administered by the UKHO, and was submitted as a UK Government Voluntary Commitment to the United Nations at the UN Ocean Conference in Lisbon, Portugal, on June 27.
The UK CSM has a remit to increase the coverage, quality and access of seabed mapping data collected using public funds, as well as to better promote it as a critical component of national infrastructure.
Working groups established
Created to spearhead a coordinated approach to the collection, management and access of seabed mapping data – and to champion a more integrated marine geospatial sector in the UK – the UK CSM has established three working groups: National Data Collaboration, International Data Collaboration, and Data Collection Standards.
These working groups will further the discussion and coordination of data accessibility, collection and collaboration, as well as progress work on data standards, by creating the conditions and developing infrastructure to enable the diverse community of marine geospatial stakeholders to come together to deliver significant, sustained and strategic benefits to the UK – particularly in the context of the integrated review and the UK’s Global Britain vision.
So far, 22 government agencies are involved in the inaugural management group meeting of the UK CSM and volunteered to participate on the working groups.
The UK CSM will develop specifications that support UK and international standards for the collection of marine geospatial data.
Work supports climate change research, the 2020 Juneau landslide, and effects of the Exxon-Valdez oil spill
NV5 Geospatial marks its 65th year helping Alaska solve environmental and geospatial challenges, with new hydrospatial projects with the National Oceanic and Atmospheric Administration (NOAA), U.S. Geological Survey (USGS), Alaska Railroad Corporation, Alaska Department of Natural Resources, U.S. Fish and Wildlife Service and the U.S. Department of Agriculture.
“As climate change intensifies, so do the challenges that Alaska and its citizens face,” said Adam McCullough, NV5 Geospatial’s Alaska program manager. “From mapping the coastlines, to collecting lidar and imagery data to better understand geohazards and landslide risks, to mapping rivers, lakes and other surface water features, we are involved in critical projects across the state. We are proud to work side by side with national, state and local governments and agencies, as well as private corporations to facilitate climate-change informed decision making over the state’s valuable, unique resources.”
The following six projects provide a sampling of the work in which NV5 Geospatial has participated across the state:
Revillagigedo Topobathymetric Lidar and Imagery Mapping – NV5 Geospatial is working alongside state and federal partners on a multi-year program to map Alaska’s 66,000 miles of complex coastline. This work is part of a larger national shoreline mapping project being undertaken by NOAA to gather baseline data to update nautical charts, manage coastal resources, and define U.S. territorial limits.
The data collected also can support maritime trade and transportation, as well as wave and wind energy site selection. The data supports coastal resiliency efforts that include modeling sea-level change, storm surge, coastal flooding and pollution trajectories, as well as analysis and monitoring of critical habitats, developing land and marine GIS base layers.
The Alaska Railroad Corporation (AARC) Lidar Acquisition for Geohazards – AARC engaged Michael Baker and NV5 Geospatial to collect high-resolution topographic lidar and imagery data for analysis of geohazards, hydrology, engineering and landscape ecology across portions of its vast rail network in Alaska. NV5 leveraged its advanced combined low-altitude sensor solution (CLASS) mounted to a helicopter to simultaneously collect lidar, ortho-imagery and oblique images along the rail line that enables researchers to evaluate landslide and hydrological risks in areas of concern.
USGS 3DEP Juneau Landslide Lidar Study – In the aftermath of unprecedented rain events in Southeast Alaska in December 2020, the City and Borough of Juneau, along with Alaska Electrical Light & Power, partnered with the USGS to acquire and process 3DEP-compliant airborne topographic lidar data covering the Juneau landslide impact area. The USGS contracted NV5 Geospatial to perform the lidar survey that included acquiring extremely accurate lidar to USGS’s highest quality level specification.
The lidar data will support planning and landslide assessment to enable the reinforcement of critical infrastructure resources in the area. Project stakeholders are able to use this data along with existing lidar collected by NV5 Geospatial in 2013 to study how the landscape is changing in precise detail.
Alaska 3D Hydrography Program (3DHP) – The USGS, in partnership with state, local, and tribal governments and others, has embarked on a multi-year effort to enhance the mapping of rivers, lakes and other surface water features for the entire state of Alaska. Supporting that initiative, NV5 Geospatial has been repeatedly contracted by USGS to develop improved hydrography, covering 62,934 square miles to date.
NV5 Geospatial is leveraging the recently completed statewide interferometric synthetic aperture radar (IfSAR) coverage as the elevation data source to define drainages, impoundments and other hydrographic features in greater detail and accuracy. Once completed, the enhanced map data will be used to inform navigable waterways; conduct flood analysis; and delineate wetlands, fish habitat, recreational opportunities, coastal resiliency and more.
Exxon-Valdez Oil Spill, National Wetlands Inventory and National Hydrography Dataset – The U.S. Fish and Wildlife Service is leveraging grant funds to map wetlands and hydrography for areas affected by the 1989 Exxon Valdez oil spill. These areas include Kodiak Island, Afognak Island and the shorelines of Shelikof Strait in Alaska. Wetlands data are used by natural resource managers to promote the understanding, conservation and restoration of wetlands, while the hydrographic data supports scientific studies, cartography and natural-resource management associated with inland surface water features.
U.S. Department of Agriculture Aerial Orthoimagery Term Contract – NV5 Geospatial was awarded a large multi-year term contract to support aerial orthoimagery in Alaska. The contract has been used to acquire tens of thousands of square miles of high-resolution orthoimagery covering some of the nation’s largest national forests including Tongass and Chugach, as well as agricultural lands significant to the Natural Resource Conservation Service. These areas are in areas with some of the most challenging weather and terrain anywhere in North America and require aircraft on persistent standby to take advantage of the brief windows of opportunity to collect high-quality imagery.
After a negotiation process that began in December 2021, Orolia officially joined Safran Electronics & Defense on July 8.
Orolia employs more than 435 people in Europe and North America and has revenues of about €100 million. Its solutions include atomic clocks, time servers, simulation and resilience equipment for GNSS signals, and emergency locator beacons for commercial aviation and military applications.
These products and solutions will complement Safran Electronics & Defense’s activities as it meets the challenges of positioning, navigation and timing (PNT) in contested and vulnerable environments, Safran said.
In most situations, GNSS receivers are the reference providers of time and position data. Still, they need to be secured by combining them with accurate, high-integrity autonomous time or inertial references.
Through this partnership with Orolia, Safran Electronics & Defense, will offer a comprehensive set of resilient PNT architectures and equipment to meet the challenges of integrity and robustness for the aviation, defense, space, transportation, new mobility and critical infrastructure markets.
“Orolia could not imagine a better fit than with Safran to secure its growth and leverage its PNT leadership positions,” said Jean-Yves Courtois, CEO of Orolia. “Thanks to the addition of best-in-class timing and inertial technologies, premier access to the largest defense and aerospace markets, and a proven track record in government program capture and execution, Safran and Orolia now have all the cards in hand to establish themselves as the resilient PNT leader.”
Martin Sion, CEO of Safran Electronics & Defense, said: “The acquisition of Orolia makes Safran one of the few companies with the full complement of PNT technologies, bringing together Orolia’s precise time referencing and Safran Electronics & Defense’s proven inertial navigation solutions. Our shared ambition is to become the world leader in resilient PNT for all conventional and strategic applications.”
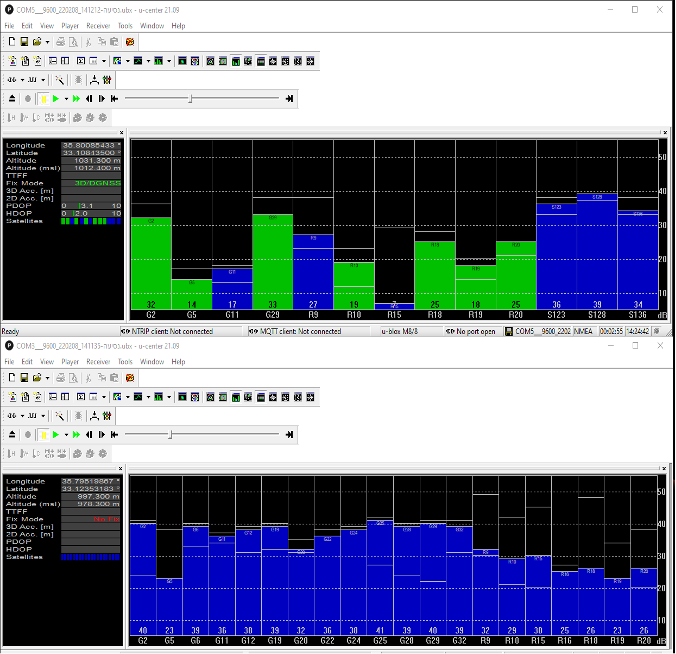
InfiniDome has conducted testing and measurements in the Golan Heights along the Israel-Syria border. The goal of the tests was to hunt down jamming events, record them, see how they affect both protected and unprotected receivers, and then compare the results.
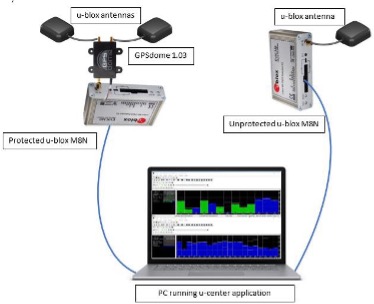
Two identical u-blox M8N receivers aboard a UAV were tested side by side, with one protected by GPSdome technology.
The GPSdome anti-jammer is a retrofit module that can be easily integrated to protect any GNSS-based system. It combines patterns from two omnidirectional antennas to create a null in the direction of the jamming signal, thus attenuating its power, making any GPS receiver about 50 times more resilient to jamming.
In a video of the tests, the GNSS receiver protected by GPSdome can be seen maintaining the GPS signal along the border, enabling uninterrupted navigation.
In contrast, the unprotected GNSS receiver loses the GPS signal during the attack, which can easily result in the drone becoming completely jammed, aggressively drifting and eventually crashing.
The Israel-Syria border experiences frequent jamming from Russian forces positioned in Syria, affecting critical border surveillance operations in the Golan Heights. Other global hotspots for jamming include the U.S.-Mexico border, where drug cartels use jammers on U.S. border surveillance drones, and the Shanghai port in China, where pirates may be the cause of ship and plane navigation confusion through use of jammers.
Jamming in Ukraine has also been well documented, with attacks from Russian forces taking down any plane, drone and even critical infrastructure asset in proximity, according to infiniDome.
Two screenshots of recordings during the event: The top image is of the GNSS receiver (u-blox M8N) protected with the GPSdome, ensuring continuous navigation. The bottom is unprotected and shows how the M8N was completely blocked for the entire route. (Images: InfiniDome)
The jamming attack was analyzed and appears not to have been a brute force attack, but rather a slightly more sophisticated signal, causing the receivers to “see” satellites but not be able to sync their signals and track them. The receiver protected by the GPSdome was able to distinguish between the real GNSS signals and the jamming signals.
In addition, GPSdome was able to attenuate the jamming signals sufficiently to be able to continue tracking the real GNSS signals while at the same time reporting the attack via its dedicated alert output.
Because GPSdome is both lightweight and easy to integrate (see integration diagram below), it can effectively provide much-needed resilience to drones and UAVs from widely available jammers, enabling drone operators to carry out missions safely and reliably.
Interview with Sara Masterson, Director, Positioning Services, Hexagon’s Autonomy & Positioning division, Hexagon | NovAtel
The accuracy of GNSS receivers continues to increase thanks to new satellites and signals, improved antennas, etc. How is that changing the role of correction services?
For sure, the accuracy of GNSS receivers and antennas is improving. However, most applications still require a higher level of accuracy than what is available from an uncorrected position even with the positioning improvements brought by new constellations and signals. GNSS corrections are still required to enable, say, lane-level accuracy, or sidewalk-block accuracy for autonomous driving or mobile phone applications and for off-road autonomy applications such as construction, mining, agriculture — these all still require centimeter-level accuracy that is enabled through GNSS correction services.
Corrections also help by improving the availability and reliability of a solution. In the future, corrections will play a key role in adding integrity to enable functionally safe solutions that are required for new applications, such as autonomous driving.
There are many options for corrections — local, regional and global, ground-based and satellite-based, public and private, etc. Which of them are generally best for which applications and conditions?
That depends very much on the user and the application. There are many new correction services in the market. Some are free, some are commercial services. Even now we see in agriculture that WAAS is sufficient for some broadacre-type applications. So, we will continue to see a range of applications, some of which will be satisfied with the level of performance from a free service and others that will be looking for the better performance and service level guarantees that come with commercial services.
If something is not working when you are using a free service, there’s no one to call. With commercial services, you get responsive customer support and you pay for higher levels of performance and service availability. In many applications, especially those that involve autonomy or safety applications, you cannot afford to have downtime, or your machine just stops working, which costs money. So, many applications are still going to be needing the performance and service level guarantee that commercial services offer.
How does TerraStar fit into this range of options? What industries and applications are you targeting?
TerraStar has a range of services that enable us to target many industries and applications. Agriculture, of course, is one of the key applications for our services and we have customers using TerraStar for mobile mapping, UAVs and new autonomy-based applications. We are also involved with some interesting Hexagon joint projects that use TerraStar corrections for mine train automation and surveying and construction.
Our entry-level TerraStar-L service is still better in performance to many of the free services or to an SBAS-type service in terms of accuracy, but it is available globally, including regions where you don’t have other options. It also provides better pass-to-pass and year-over-year repeatability, as well as very quick reconvergence time if there are any issues with GNSS outages.
Our flagship offering is the TerraStar-C PRO service. That’s where we just introduced the “RTK from The Sky” technology, bringing the performance down to converging to two and a half centimeters in three minutes. That, too, is available globally which makes it a real game changer for customers in many different applications, because they can start to look at that service as an alternative to RTK and without the added connectivity logistics that an RTK solution brings.
Our RTK assist solutions are good augmentation solutions for customers who still primarily need RTK but experience some RTK correction outages – RTK ASSIST bridges through those outages. So, we have a wide range of service offerings in the portfolio that can address the positioning needs of many applications.
Photo: Hexagon | NovAtel
Will the reasons for having a base and rover setup decrease sharply?
Use of base and rover setups is already decreasing and being replaced by both PPP and network RTK solutions. There are applications where RTK still makes sense, such as those that have very tight vertical requirements and many survey applications. Another Hexagon division, Hexagon’s Geosystems division, incorporates TerraStar correction data into their new SmartNet Global offering as a seamless service that provides both SmartNet RTK plus TerraStar for either bridging outages or independent PPP operation, depending on the project’s location and whether they’re within range of SmartNet coverage.
There will be many applications that continue to benefit from a combination of the two technologies. However, as the PPP services, like TerraStar, continue to improve by reducing convergence time and providing highly reliable solutions, users in those applications can be confident that the standalone PPP solutions meet their performance needs and bring many additional benefits such as consistent, global coverage and performance.
Is TerraStar completely receiver agnostic?
TerraStar is currently only compatible with NovAtel’s GNSS hardware. Going forward, through the work that I referenced with autonomous driving and mass-market applications, we will be providing TerraStar services in industry-standard formats, depending on the inter-operability requirements coming from those applications. We expect that there will be demand for dual sourcing of corrections and interoperability between chipsets that are used in vehicles, for example. For those applications, we will be developing TerraStar services that are compatible with hardware from other GNSS manufacturers.
The new service gives customers the opportunity to experience devices powered by LoRa Edge and evaluate the accuracy and power consumption of the LoRa Edge platform, which offers an ultra-low power and cost-effective solution for indoor/outdoor asset tracking.
LoRa Cloud Locator features built-in serverless technology and delivers a simple end-to-end experience for customers to evaluate LoRa Edge implemented in various ecosystem trackers, either on a private or public LoRaWAN network.
“Asset tracking is one of the most common use cases across industry verticals,” said Karthik Ranjan, LoRa Cloud solutions and partnerships leader in Semtech’s Wireless and Sensing Products Group. “Whether it’s tracking wheelchairs in a hospital, shopping carts in retail, pallets in supply chain, cattle in agriculture, or pets around a home, asset tracking can be found everywhere. Semtech’s LoRa Cloud Locator is the fastest way for customers to easily see for themselves the benefits offered by purchasing trackers with LoRa Edge, provisioning them onto the application and seeing their location on the map.”
LoRa Cloud Locator is designed specifically to work with trackers using Semtech’s LoRa Edge LR-series chips with minimal effort. Once configured on the service, together with Semtech’s LoRa wireless radio frequency technology for transmission to the cloud, customers can view the tracker location on the map in less than 15 minutes.
“Semtech’s LoRa Cloud Locator is the most efficient and fast way to evaluate the LoRa Edge platform as it can measure the performance of the technology and differentiate when a device is tracked by GNSS or Wi-Fi,” said Maximiliano Ruiz, founder and CEO at Galileo RTLS. “With the Wi-Fi location feature, we can now receive GNSS signals without paying for the prohibitive power consumption of traditional GNSS technologies. Through leveraging LoRa Edge, locating assets around the world is much simpler with the unprecedented years of battery life.”
The companies on June 29 signed a precise-positioning business partnership agreement that KT hopes will enable precision location services for autonomous vehicles, drones and urban air mobility.
Swift Navigation’s precise-positioning platform improves location accuracy from several meters to centimeters, enabling safer driving, improved efficiency for last-mile delivery and commercial transport operations, and enhanced accuracy for mobile devices.
Service providers harnessing the solution can now offer GNSS/GPS- backup-as-a-service (GBaaS) with enhanced precision and availability
OSA 3300-HP. (Photo: ADVA)
ADVA has introduced its Oscilloquartz high-performance optical cesium atomic clock. The coreSync OSA 3300-HP is ADVA’s latest innovation in assured positioning, navigation and timing (PNT).
Following ADVA’s launch of an optical pumping timing solution two years ago, the OSA 3350 ePRC+, the OSA 3300-HP takes the technology to new levels. It has a 10-year lifetime compared to the five years offered by currently available high-performance magnetic clocks.
As a high-performance optical cesium clock, the OSA 3300-HP sets a new benchmark for precision and availability, ADVA claimed, providing the resilience required for PNT assurance in critical infrastructure and empowering service providers to deliver differentiated service-level-agreement timing offerings with integrated GNSS backup.
The feature-rich device has embedded Ethernet- and IP-based management as well as a user-friendly touchscreen graphical user interface.
“The launch of our coreSync OSA 3300-HP marks a key milestone in the design of atomic frequency and phase standards,” said Gil Biran, GM of Oscilloquartz, ADVA. “After many years of extensive work in our Swiss laboratories supported by the European Space Agency, we now have a mature, state-of-the-art technology that enables a major leap in the accuracy and stability of network timing while providing a substantially longer lifetime.”
Atomic clocks offer synchronization backup for networks that rely on GNSS-based timing, combining high accuracy with outstanding availability. The OSA 3300-HP commercial high-performance optical cesium atomic clock features an all-digital design and leverages optical-pumping techniques using laser diodes. This enables it to measure 100 times the number of atoms, making it more efficient compared to existing primary reference clock (PRC) technologies.