Firmware upgrade available for Xsens Sirius and Xsens Avior motion sensors delivers centimeter-level vertical displacement measurement for marine stabilization and control systems
Xsens has announced a major capability upgrade for its industrial-grade Xsens Sirius and Xsens Avior inertial measurement units (IMUs). The new Heave feature delivers centimeter-level vertical displacement measurement, enabling real-time stabilization and wave compensation in a wide range of marine applications.
Marine engineers can now access comprehensive motion data — roll, pitch, yaw and Heave — from a single compact sensor. This eliminates the need for external processing or for oversized tactical-grade systems while maintaining the precision required for offshore platforms, vessels, docking systems, marine robots, buoys and surveying equipment.
The Heave output operates at up to 100Hz, providing the real-time response needed in active stabilization and wave compensation systems. All processing happens on-device, simplifying system integration and reducing latency.
Xsens motion reference units (MRUs) — IMUs with Heave capability — deliver real-time Heave accuracy better than 5 cm for wave periods up to 29 s. This covers most marine applications. For longer wave periods up to 40 s, accuracy is approximately 6cm, twice the range supported by comparable industrial-grade MRUs.
“Engineers now get vertical displacement data directly onboard, alongside roll, pitch and yaw,” said Ayush Sharma, Algorithms Engineer at Movella. “This gives marine customers the complete motion reference they need for stabilization and compensation systems, without the size or certification overhead of tactical MRUs.”
The algorithm uses proprietary phase correction and bias estimation to mitigate the effect of drift over extended operating periods. Users can also define offset points — center of rotation (COR) and point of interest (POI) — ensuring that Heave values reflect the true motion of the vessel or payload, even when the MRU is installed away from the POI.
The Heave algorithm is available for download immediately as a firmware update for existing Xsens Sirius and Xsens Avior units in the field, with no hardware modifications required. All new units ship with the feature integrated. Heave output is enabled with a single setting in the MT Manager software or the Xsens software development kit (SDK).
Designed for straightforward integration
Xsens Avior is a compact OEM module for embedded system designs.
Xsens Sirius is a standalone MRU in a rugged IP68 housing for harsh environments. It meets MIL-STD-202 requirements.
Both products support RS-422, CAN, and UART interfaces. Development kits are available for prototyping, with free SDKs for C/C++, Python, ROS1, ROS2, and MATLAB. All units meet CE, FCC, and RoHS regulatory requirements, and are ITAR-free.
Xsens Avior and Xsens Sirius MRUs are available globally from Movella and authorized partners. For specifications, datasheets, and ordering information, visit www.movella.com/products/sensor-modules or contact a Movella sales representative.
Throughout the past several decades, GNSS has become one of the most significant technologies in modern engineering, supporting transportation, communications, finance, emergency response, and critical infrastructure [1]. Its precision, global reach, and reliability have enabled entire industries to scale in ways that would otherwise have been impossible. Yet as GNSS is used more deeply in autonomy-driven and safety-critical domains, the limitations of relying on a single-layer PNT architecture are becoming increasingly apparent.
Urban canyons degrade satellite geometry and tracking performance; intentional and unintentional interference is now commonplace [2]; spoofing has shifted from a theoretical concern to an operational reality; and indoor environments, which are essential for robotics, logistics, and emergency services, remain largely outside GNSS’s physical reach. These challenges are not shortcomings of GNSS itself. They reflect what the system was originally designed to provide: a globally available positioning and timing reference, not the entire resilience burden for every PNT-dependent application.
In parallel, communications technologies have undergone rapid transformation. The evolution from LTE to 5G, and soon to 6G, has introduced wider bandwidths, massive MIMO antenna arrays, improved network synchronization, and dense deployment across urban and indoor environments [3]. At the same time, LEO broadband constellations have matured into powerful satellite infrastructures capable of delivering strong signals, rapid Doppler dynamics, and frequent visibility. Although these systems were built primarily for data connectivity, their physical characteristics naturally lend themselves to positioning and timing.
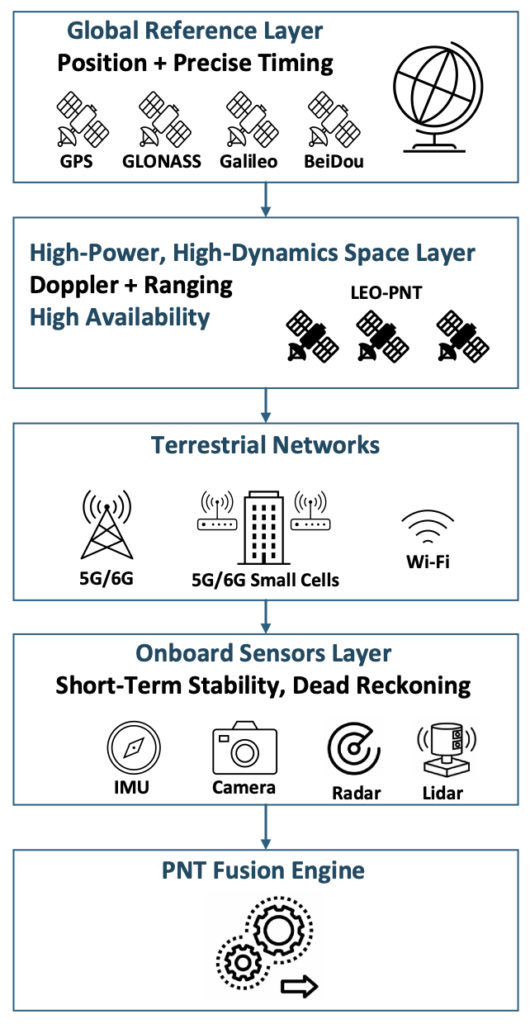
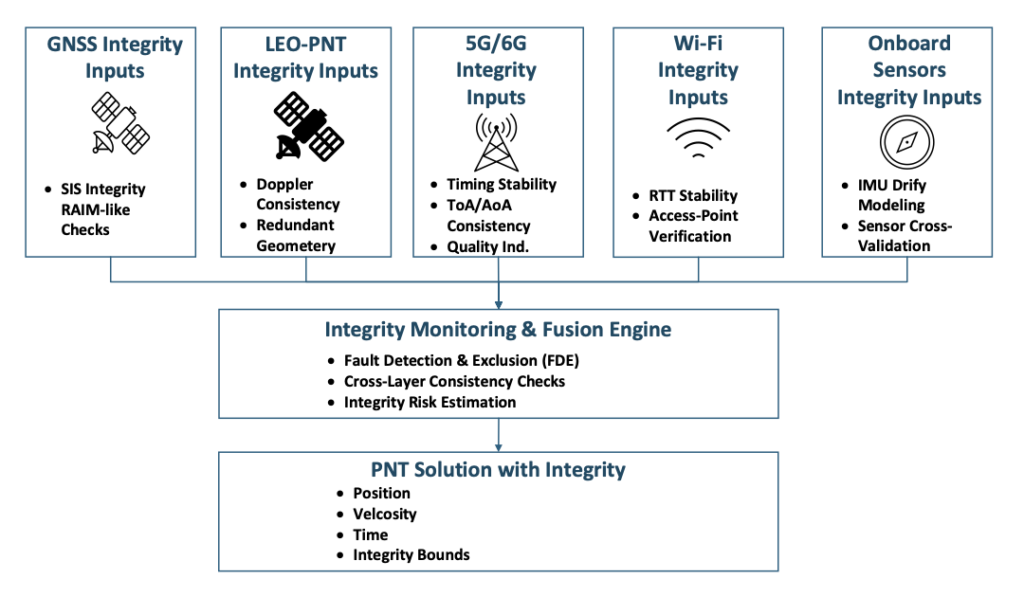
Taken together, these developments point toward a new direction for resilient PNT: a multi-layer architecture in which GNSS serves as the global reference layer and is complemented by high-power, high-dynamics LEO satellites, terrestrial 5G/6G networks and Wi-Fi systems, and a suite of onboard sensors that provide short-term stability and dead-reckoning capability. Figure 1 illustrates this emerging architecture and highlights how each layer contributes specific observables, coverage strengths, and levels of robustness. The remainder of this article examines the physical foundations of communications-based PNT, the role of LEO as an augmentation space segment, the engineering challenges inherent in multi-source navigation, and the system-level architecture that is now taking shape to deliver resilient and ubiquitous PNT.
Figure 1. Multi-layer architecture for resilient PNT. (All figures provided by the author)
2. 1 Growing Dependence on PNT and GNSS Vulnerability
Nearly every sector of modern life depends on GNSS-based positioning and timing. As reliance grows, exposure to GNSS limitations grows with it. Dense urban environments create severe multipath and signal blockage; jamming and spoofing incidents are now regularly reported near conflict zones and busy ports [4]; and autonomy concepts in aviation and ground mobility increasingly assume reliable PNT even when GNSS performance is degraded or unavailable.
GNSS will remain the global reference layer, but it was never intended to carry the full burden of these mission-critical demands on its own. A complementary set of technologies is needed, systems that continue to function in GNSS-challenged environments and provide redundancy when satellite signals are unavailable, corrupted, or intermittent.
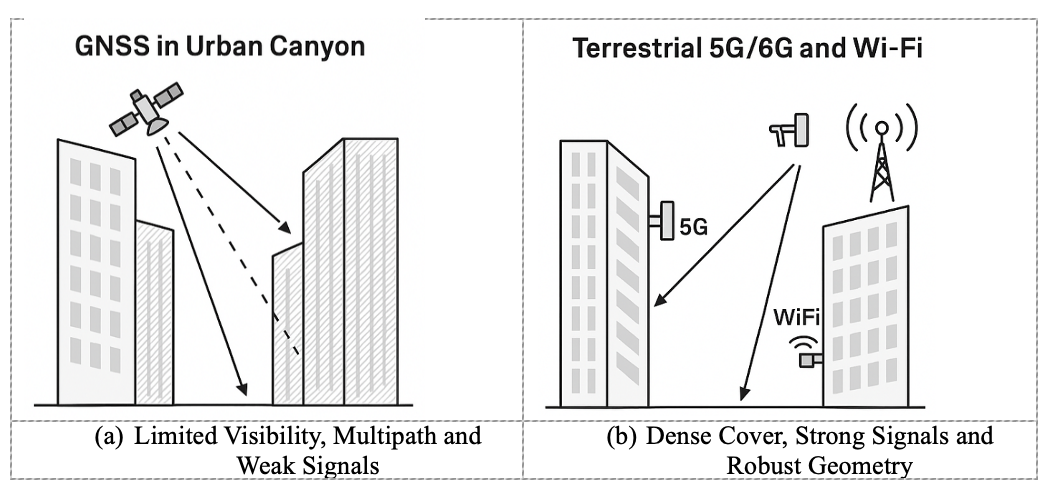
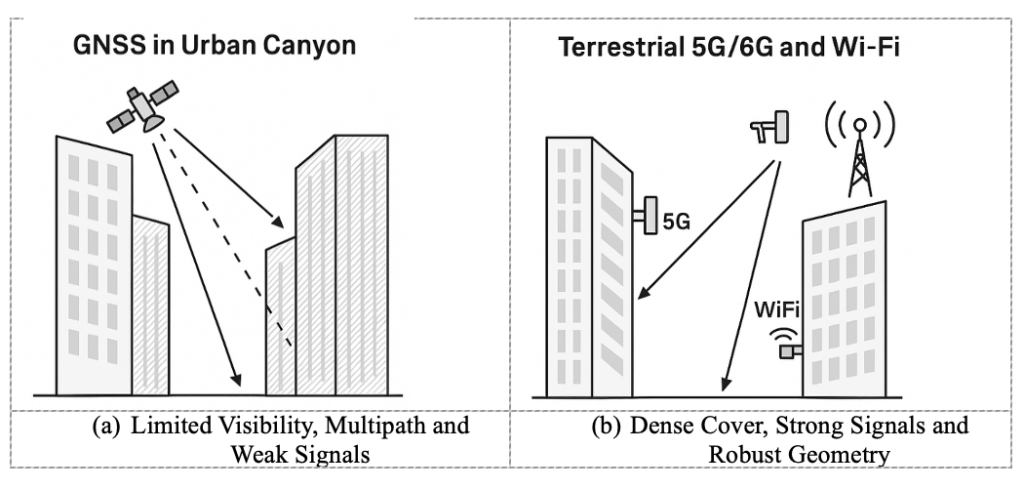
Error! Reference source not found. illustrates this challenge in a representative urban-canyon environment. Tall buildings restrict line-of-sight to GNSS satellites and generate strong multipath reflections, resulting in weak and unreliable signals (Figure 2a). By contrast, terrestrial networks such as 5G/6G and Wi-Fi maintain strong signal levels and robust geometry because their transmitters are embedded within the built environment, often only tens or hundreds of meters away (Figure 2b). This complementary coverage is a fundamental motivation for integrating communications signals into future PNT architectures.
Figure 2. Comparison of GNSS and terrestrial network coverage in urban canyons.
2.2 Communication Networks Have Quietly Become PNT-Capable
Modern communication networks have evolved far beyond their original purpose of data transport [5]. Several physical-layer characteristics now make 5G, Wi-Fi 7, and future 6G systems surprisingly well suited to PNT:
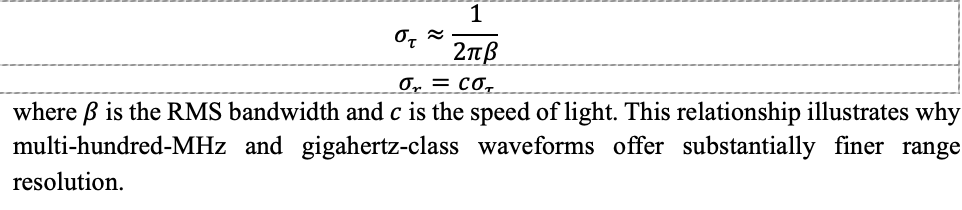
Wideband signals. Wi-Fi 7 supports 320-MHz channels and 5G FR2 offers up to 400 MHz, with multi-GHz bandwidths anticipated for 6G [6]. Wider bandwidth directly improves time-of-arrival (ToA) precision. The ToA uncertainty can be approximated by:
Massive MIMO. Multi-element antenna arrays estimate angle-of-arrival (AoA) and angle-of-departure (AoD), effectively turning base stations into spatial sensors capable of separating line-of-sight from multipath.
Dense deployment. Unlike GNSS satellites, orbiting at roughly 20,000 km, terrestrial networks are woven directly into the environment. Small cells and access points provide excellent geometry in exactly the locations where GNSS performance is weakest, including city centers, campuses, factories, and warehouses.
High signal power. Terrestrial signals arrive at the receiver tens of decibels stronger than GNSS, improving indoor penetration, acquisition speed, and robustness to interference.
These features were introduced to enhance connectivity, yet they collectively create an RF landscape that is inherently PNT-capable.
2.3 The Rise of LEO Constellations as a Complementary Space Layer
A third major driver behind communications-enabled PNT is the rapid proliferation of LEO satellite constellations. Broadband systems such as Starlink and OneWeb, together with several emerging PNT-dedicated LEO constellations, offer distinct advantages [7]:
Stronger received power. LEO satellites operate at altitudes of roughly 500–1,200 km, far closer than GNSS satellites at 20,000 km or higher, resulting in significantly stronger received signals.
Rapid Doppler dynamics. The relative motion of LEO satellites produces large, fast-varying Doppler shifts, which improve observability of user velocity and, over short intervals, position.
Large constellation sizes. Hundreds or thousands of satellites create rich geometry and frequent visibility, enhancing availability and resilience.
Although many LEO systems were designed primarily for communications, their signals can already be exploited opportunistically for positioning and timing. Purpose-built LEO-PNT systems extend these capabilities by offering wideband navigation signals, multi-frequency operation, and security features intended specifically for resilient PNT [7].
These characteristics make LEO a natural augmentation layer, strengthening GNSS performance and providing additional robustness in degraded, obstructed, or contested environments.
3. Technical Foundations of Communications-Based PNT
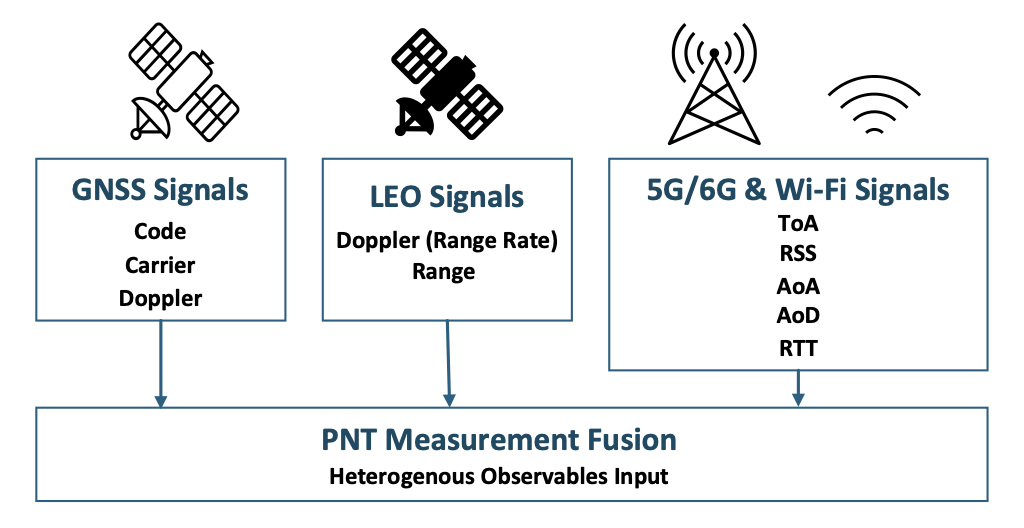
Modern communication and LEO satellite systems provide a diverse set of physical-layer measurements that can be fused with GNSS to create a resilient, multi-layer PNT solution. These observables go well beyond traditional GNSS code and carrier measurements and include Doppler, ranging, time-of-arrival, round-trip time, angle-of-arrival, angle-of-departure, and received signal strength. Figure 3 summarizes this heterogeneous measurement landscape and shows how each layer contributes distinct observables to the fusion engine.
Figure 3. PNT measurement diversity across GNSS, LEO-PNT, and terrestrial networks.
3.1 High-Resolution Ranging from Wideband Waveforms
Ranging accuracy is fundamentally linked to signal bandwidth. GNSS signals typically occupy 1–20 MHz, whereas modern communication waveforms may span hundreds of megahertz. Wider bandwidth enables finer temporal resolution, allowing receivers to separate closely spaced multipath components and improve time-of-arrival (ToA) precision [6].
In practice, Wi-Fi 7 and 5G FR2 waveforms can support sub-meter ranging in favorable conditions and substantially enhance relative positioning indoors and in dense urban environments. Techniques such as two-way ranging, cooperative localization, and inertial smoothing can extend performance even further. As shown in Error! Reference source not found., these wideband ToA and RTT observables form an essential input to the PNT measurement fusion layer.
3.2 Spatial Sensing with Massive MIMO
Massive MIMO arrays are one of the most powerful enablers of communications-based PNT. By comparing the phase and amplitude across many antenna elements, base stations estimate angles of arrival (AoA) and departure (AoD), turning terrestrial infrastructure into distributed RF sensor arrays [8].
Angle-based measurements offer several important benefits:
Improved localization geometry in 3D urban canyons
Ability to distinguish line-of-sight (LOS) from multipath
High update rates suitable for UAVs and advanced air mobility (AAM) platforms
A simplified Cramér–Rao lower bound (CRLB) illustrates how antenna geometry and signal power influence the accuracy of AoA estimation:
3.3 Infrastructure Density and Geometric Strength
From a PNT perspective, measurement geometry can be as important as measurement precision. Dense deployments of base stations, small cells, and access points give 5G, 6G, and Wi-Fi networks inherently strong geometric diversity, especially in environments where GNSS geometry collapses.
In indoor settings or street canyons, a receiver may have ten or more RF sources within a few hundred meters. This density improves dilution of precision (DOP), increases redundancy, and enables fallback positioning even when GNSS availability drops to zero. Within the multi-layer architecture described in Figure 1, terrestrial networks therefore provide crucial observability in GNSS-restricted environments.
3.4 High Signal Power and Robust Tracking
Terrestrial and LEO communication signals enjoy a link-budget advantage of roughly 50–100 dB over GNSS. This additional power yields several practical benefits:
Better performance with small or non-ideal antennas
Increased resilience to interference and jamming
Faster acquisition and re-acquisition after outages
More reliable tracking under fast dynamics or partial obstruction
In many scenarios, 5G, Wi-Fi, and LEO signals remain trackable long after GNSS signals fall below usable thresholds, providing essential continuity for navigation filters and multi-sensor fusion engines.
3.5 Timing and Synchronization in Communication Networks
Modern wireless networks rely on tight synchronization for scheduling, beamforming, and coordinated MIMO. They obtain timing from GNSS, fiber distribution, and packet-based protocols such as IEEE 1588 Precision Time Protocol (PTP) [9]. As these timing infrastructures mature, communication networks increasingly become timing providers rather than solely timing consumers.
Although terrestrial networks do not yet match the long-term stability of GNSS-disciplined oscillators, they provide valuable short-term holdover and regional timing continuity. These capabilities play an important role in multi-layer PNT systems, particularly during GNSS outages.
4. Engineering Challenges and Limitations
Although communications-based PNT provides powerful complementary capabilities, significant engineering challenges remain. These challenges do not diminish the value of multi-layer PNT; rather, they highlight the technical rigor required to deploy these systems reliably on a scale.
4.1 Multipath and Non-Line-of-Sight Propagation
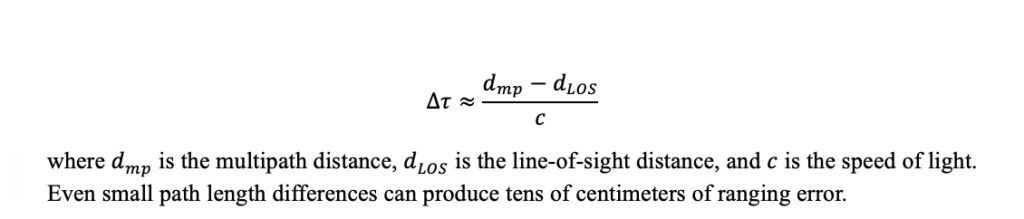
For terrestrial PNT, multipath and non-LOS propagation remain the dominant contributors to ranging and angle errors. Buildings, vehicles, reflective indoor structures, and metallic industrial environments introduce secondary paths that bias ToA, RTT, AoA, and Doppler measurements. A simplified model of multipath-induced ToA bias is:
Massive MIMO beamforming, high-resolution channel estimation, and machine-learning LOS classifiers can mitigate these errors, but performance is highly environment-dependent and cannot be guaranteed in all cases. Figure 3, introduced earlier, highlights how diversity in measurement types helps reduce susceptibility to any single error mechanism.
4.2 Synchronization Constraints and Timing Drift
Communication networks require precise time alignment for scheduling, beamforming, and coordinated MIMO. However, network clocks do not yet match the long-term stability of GNSS-disciplined oscillators. Backhaul delay variability, oscillator drift, and partial GNSS visibility at base stations introduce timing uncertainty that must be explicitly modeled in a PNT fusion engine.
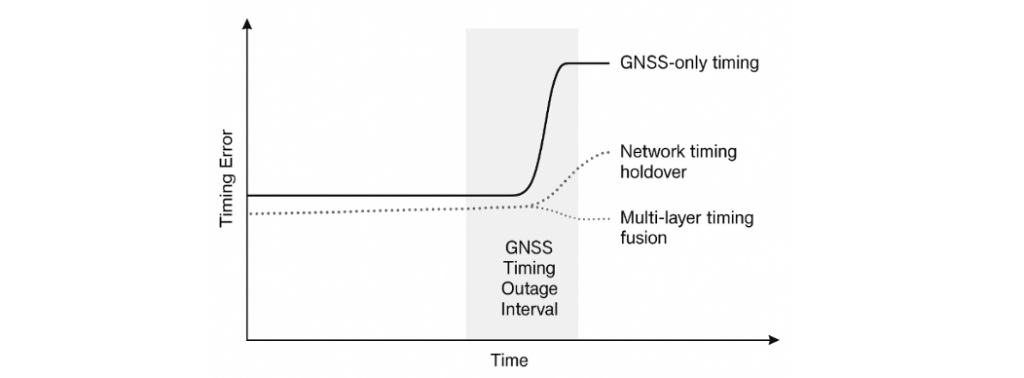
Figure 4 illustrates timing error growth during a GNSS outage, comparing:
GNSS-only timing, which diverges quickly without satellite visibility
Network timing holdover, which slows but does not halt drift
Multi-layer timing fusion, which maintains the lowest error accumulation
These behaviors demonstrate why communication-based timing is best used as a complementary layer rather than a standalone reference.
Figure 4. Timing error comparison during a GNSS timing outage.
4.3 Waveform and Structural Limitations
Modern communication waveforms such as OFDM were optimized for throughput and spectral efficiency, not navigation. Several characteristics constrain raw positioning performance:
Finite pilot density limits effective ranging bandwidth
High peak-to-average power ratio (PAPR) stresses nonlinear receivers
4.4 Coverage Variability and Regulatory Constraints
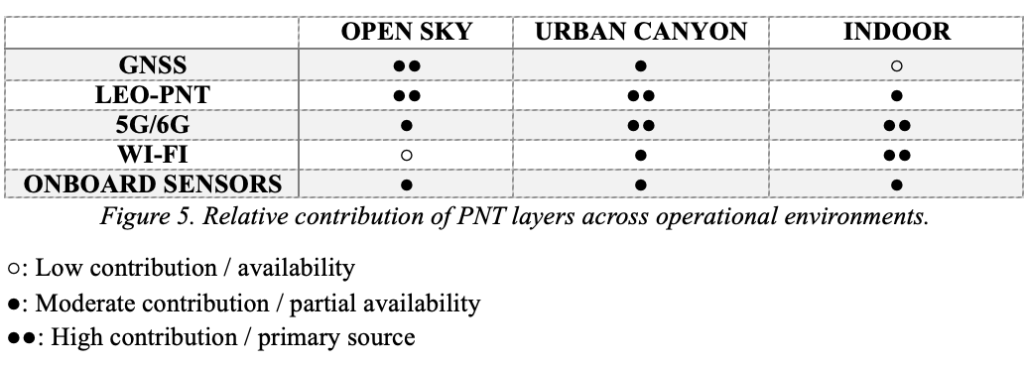
Terrestrial network density varies sharply by geography. Urban cores, industrial sites, and indoor campuses enjoy strong 5G/6G and Wi-Fi coverage, whereas rural, maritime, and mountainous regions may see limited improvements without LEO-PNT augmentation. Spectrum policy, privacy rules, and operator-controlled access to timing and positioning features further constrain how widely these capabilities can be exposed. Figure 5 summarizes the relative contribution of each PNT layer—GNSS, LEO-PNT, terrestrial networks, and onboard sensors—across open-sky, urban, and indoor environments.
Figure 5. Relative contribution of PNT layers across operational environments.
4.5 Security and integrity
As communication signals begin supporting navigation functions, they must meet higher standards for robustness, integrity, and security. PNT observables are vulnerable to spoofing, replay, meaconing and cyber-attacks on timing sources [10]. GNSS experience demonstrates the value of:
Cross-layer consistency checks
Cryptographic authentication
Fault detection and exclusion (FDE)
Monitoring for anomalies in Doppler, timing, or angle domains
Redundancy across multiple constellations and layers.
These functions are visualized in Figure 6, which illustrates how a multi-layer PNT system performs integrity monitoring across heterogeneous measurements.
5. A Multi-Layer Architecture for Future PNT
The earlier sections described why GNSS alone cannot meet emerging PNT requirements and how communications and LEO signals provide new sources of observability. Building on those foundations, Figure 1 introduces a multi-layer architecture in which GNSS, LEO-PNT, terrestrial networks, and onboard sensors cooperate to deliver resilient positioning and timing. This section outlines the role of each layer and how they integrate into a unified system.
5.1 GNSS as the Foundational Global Layer
GNSS will continue to provide the global reference frame, absolute positioning, and precise timing that anchor the entire architecture. Its worldwide availability, mature error modeling, and extensive user base make it the natural reference for other layers to align with whenever GNSS is available and reliable. In this sense, GNSS remains the “truth model” for time and coordinates, even as additional layers enhance resilience.
5.2 LEO-PNT as the High-Power, High-Dynamics Space Layer
LEO satellites provide diversity in orbit, signal power, geometry, and dynamics. Their lower altitude results in significantly stronger signals and rapid Doppler variations that improve motion observability. These characteristics reinforce GNSS performance in interference, urban canyon, and high-dynamics environments. As shown in Figure 3, LEO adds Doppler-based range-rate observables that are particularly valuable for maintaining continuity when GNSS quality fluctuates.
5.3 Terrestrial Networks as the Urban and Indoor Layer
5G, Wi-Fi 7, and future 6G networks form the densest PNT-capable infrastructure ever deployed. Their wideband signals, massive MIMO arrays, and strong received power position them as the dominant layer for indoor and urban navigation. Where GNSS geometry collapses, terrestrial networks provide ToA, AoA, AoD, RTT, and coverage exactly where users most often need it. Figure 5 highlights how their contribution becomes primary indoors and highly complementary in urban canyons.
5.4 Onboard Sensors and Local References
IMUs, odometry, barometers, cameras, radar, and lidar provide short-term stability and immediate awareness of the immediate environment, independent of external RF conditions. These sensors bridge outages and reduce reliance on any single external signal source. Their role within architecture mirrors their role in autonomy today: providing the continuity needed when GNSS, LEO, or terrestrial signals fluctuate. Together with RF observables, they form a robust solution space consistent with the measurement diversity shown in Figure 3.
5.5 Fusion, Standards, and System Engineering
Realizing a multi-layer PNT system is fundamentally a system-engineering effort. Success depends on:
Common timing and reference frameworks across GNSS, LEO, and terrestrial layers
Standardized quality indicators and integrity metrics
Interfaces that expose PNT-relevant observables from communication networks while respecting privacy and operational constraints
Cross-layer consistency checks that ensure no single measurement dominates unchecked
Standards bodies, including 3GPP, IEEE and aviation authorities, are beginning to address these needs, but operationalizing multi-layer PNT at scale will require continued collaboration across industries. Figure 6 illustrates how integrity information from each layer contributes to fault detection, cross-checking, and integrity-bound estimation within the fusion engine.
Figure 6. Integrity monitoring in multi-layer PNT architecture.
6. Conclusion
The era of single-layer PNT is coming to an end. As reliance on precise positioning and timing accelerates across aviation, ground autonomy, critical infrastructure, and networked systems, GNSS alone cannot shoulder the growing resilience burden. Fortunately, a rich set of complementary technologies already surrounds us. Dense terrestrial networks, emerging LEO constellations, and increasingly capable onboard sensors provide observables that naturally augment GNSS and extend PNT into environments where satellite signals struggle.
The opportunity now is to treat communications and PNT not as separate domains but as elements of a unified system. A multi-layer architecture — such as the one outlined in this article — offers stronger availability, improved measurement diversity, and inherent resilience against interference, outages, and environmental constraints. The key challenge ahead lies not in inventing new signals, but in system engineering: establishing shared timing frameworks, standardizing measurement interfaces, ensuring integrity across heterogeneous sources, and building trust in signals not originally designed for navigation.
Most of the technical ingredients are already in place. The next decade will determine how effectively industry, government, research institutions, and standards bodies can integrate them into certifiable, interoperable, and widely deployable solutions. If successful, multi-layer PNT will become a foundational capability — providing trustworthy positioning and timing wherever future autonomous systems, vehicles, and critical infrastructure require it.
As the news subsides on the U.S. operation in Venezuela to capture Nicolás Maduro and his wife, attention is now turning to the legal aspects of the prosecution. Nevertheless, this military undertaking was apparently extremely complex and involved very discreet initial persistent surveillance of not only Maduro’s location but also of a large number of military installations and facilities.
Venezuela has acquired an extensive arsenal of sophisticated Russian air defense capabilities beginning in 2011 and which were apparently recently upgraded in 2024. Heavy damage during the U.S. operation at La Carlota Air Base in Caracas, Fort Tiuna Military Complex, La Guaira Port and El Higuerote Airport appears to have overcome not only surface-to-air anti-aircraft missile systems but also Su-30 Sukhoi Flanker fighter aircraft armed with air-to-air missiles.
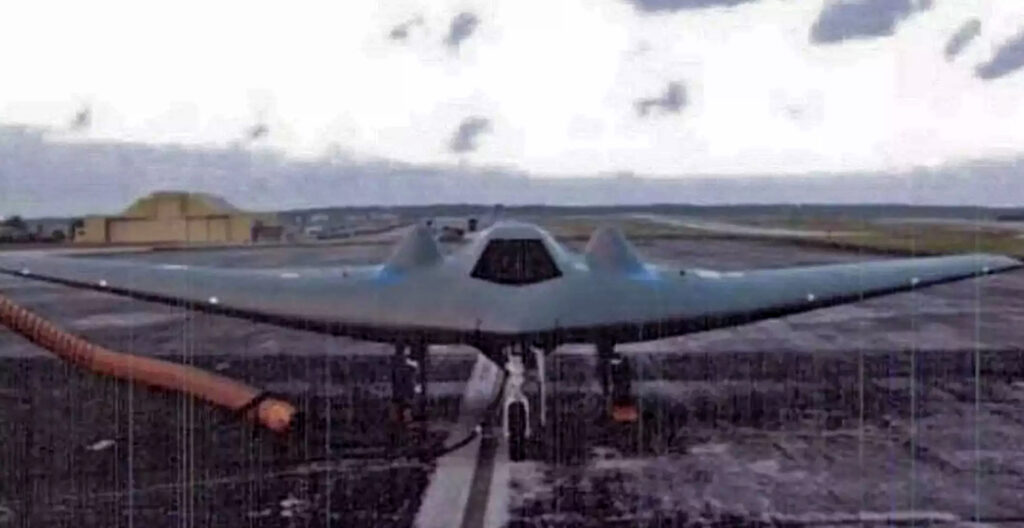
And how was this accomplished? Well, likely with the help of legendary Lockheed RQ-170 Sentinel Stealth Drones. Nothing in the classified operation has been positively confirmed, but it is known that one or two of these surveillance drones were videoed returning to Naval Station Roosevelt Roads in Puerto Rico in the early morning of Jan. 3 following the U.S. attack. And piecing together earlier photos of U.S. Latin American command with an RQ-170 operations operative, pundits now believe confirm RQ-170 involvement.
The 30th and 44th Reconnaissance Squadrons at Wing at Creech Air Force Base in Nevada are the only units the Air Force has confirmed to be operating RQ-170s Wraith low-observable stealth drones.
It’s therefore quite possible that when President Trump said, “I was able to watch it in real time, and I watched every aspect of it,” that the video link may have been supplied by one or more of the RQ-170 Wraith drones circling over the action on the ground.
Another aspect of the Venezuelan operation comes from people on the ground in Caracas who reported a number of instances of “flying bombs” which fell on targets during the U.S. operation. Video clips and numerous personal accounts apparently supported the reports that prop-powered attack drones were being crashed into ground targets, followed by big explosions.
And previously on Dec. 16, the U.S. had a “first” for the U.S. Navy to have launched a one-way attack drone from the deck of the USS Santa Barbara in the Arabian Gulf. These earlier reports indicated that these attack drones could be launched by catapult, using rocket assist and from mobile ground vehicles.
Therefore, it is not much of a leap to say it’s very likely that other marine and ground launch facilities in and around Venezuela dispatched many one-way, likely semi-autonomous attack-drones to take out targets prior to Delta Force being helicoptered in to capture Madura.
Meanwhile back in the U.S., well away from military action, the Federal Communications Commission has effectively banned the sale of any new UAS or parts for UAS being imported into the U.S. The ruling was developed after the White House initiated a review aimed at protecting American security which decided “that UAS and UAS critical component parts that are produced in foreign countries pose unacceptable risks to the national security of the United States and to the safety and security of U.S. persons.”
To somewhat clarify the situation, the FCC just added exemptions for Pentagon-approved “Blue List” drone models and parts thereof from EagleNXT, Parrot, Teledyne FLIR, Neros Technologies, Wingtra, Auterion, ModalAI, Zepher Flight Labs and AeroVironment — imports from these suppliers will be allowed through the end of 2026.
So with new models of foreign drones being prevented from entering the U.S., the U.S. drone industry has been granted, at least for the moment, an opportunity to develop leading UAS models which will eventually outpace existing foreign drones operating in the U.S. It’s predicted that the FIFA soccer World Cup this summer will need a lot of drone coverage for security purposes — possibly a new U.S. drone home market.
The Bell-Boeing V-22 Osprey is a complex military tilt-rotor aircraft which overcame many hurdles in its development and initial operations phase, even having some incidents during its mature field operations.
Nevertheless, the Chinese appear to have adopted a similar design approach for the Lanying R-6000 manned/unmanned tilt-rotor 6-12 passenger eVTOL and a 2-ton-cargo transport version. The promotional video for the Chinese United Aircraft R-6000 seems to interchange shots of the V-22 in hover mode with recent R-6000 prototype system in hover flight. However, Bell-Boeing web statements disclaim any linkage with the Chinese company or its R-6000 development.
If the name “United Aircraft” seems familiar, it’s because there was such a company in the U.S. in the 1930s, changing its name to United Technologies (Pratt & Whitney) in 1975, now RTX Corp.
United Aircraft in China has apparently been around since 2012 and has produced a number of vertical lift aircraft, including the TD220 twin-coaxial helicopter (without tail boom). As with most large industrial companies in China, this one also seems heavily engaged with the Chinese military and is now making inroads into the civilian marketplace with a number of UAVs for various applications, leading up to the projected 550 mph Lanying R-6000, which has been depicted in low-level flight mode.
Promotional image of eVTOL Lanying R-6000. (Photo: United Aircraft)
So, a mixed bag of unmanned aircraft reports this month, ranging from drones likely used in the recent U.S. action in Venezuela, FCC rulemaking to restrict imports of foreign UAVs into the U.S., and all the way to a new potential Chinese tilt-rotor eVTOL entrant.
CHC Navigation announced at CES 2026 that MOVA has integrated CHCNAV PointX integrated satellite ground service and the StellaX high-precision positioning chip into its NAVAX 5000 AWD intelligent robotic lawn mower, unveiled at the show in Las Vegas last week.
The integrated positioning solution is designed to support centimeter-level accuracy for wire-free mowing, without requiring users to install a local RTK base station or subscribe to cellular data plans.
Wire-free robotic mowers are accelerating adoption of virtual boundaries and automated coverage. Many systems rely on local RTK reference stations, network RTK, or cloud connectivity, which can increase installation complexity and introduce ongoing service costs. CHCNAV and MOVA developed a positioning architecture designed to address these limitations through satellite delivered corrections combined with onboard sensor fusion.
Wire-free mowing without local base stations
NAVAX 5000 AWD uses CHCNAV PointX integrated satellite ground service to deliver GNSS enhancement signals via satellite. With the StellaX high-precision positioning chip, the mower can achieve centimeter-level positioning across supported regions without requiring users to deploy and maintain an RTK base station at home. This can reduce setup time, remove routine base station maintenance, and avoid recurring cellular data fees for positioning corrections.
Residential yards often include trees, walls, fences and buildings that degrade satellite visibility and create multipath effects. NAVAX 5000 AWD combines satellite-based RTK positioning with binocular vision and lidar to strengthen navigation performance in these environments.
With PointX and StellaX, the system is designed to deliver stable positioning and consistent path tracking in obstructed areas where traditional GPS RTK-only approaches can be difficult to sustain.
PointX-integrated satellite ground services support rapid RTK initialization to reduce waiting time at startup. This enables power on and go operation for typical mowing sessions and supports repeated runs with minimal user intervention.
The Trimble module provides Volatus’ clients with a turnkey solution for highly-accurate aerial data acquisition and fully-remote drone operations in real-world missions, including beyond visual line of sight (BVLOS).
The Trimble PX-1 RTX uses Trimble’s CenterPoint RTX corrections along with compact, high-performance GNSS-inertial hardware to deliver real-time, centimeter-level positioning and highly precise inertial-derived true heading measurements. This technology reduces operational risks associated with poor sensor performance or magnetic interference by providing enhanced positioning redundancy.
Volatus must meet strict guidelines addressing airspace entry and exit, altitude and speed, and communication and remote identification when taking off from and landing at the Edmonton International Airport in Alberta, Canada. The flight corridor approved by Transport Canada and Nav Canada requires them to land and takeoff with precision, while staying at 50-feet altitude when crossing airplane arrival routes.
Trimble PX-1 RTX’s precise positioning capabilities address crucial accuracy challenges for takeoff and landing, while supporting an exact flight altitude and positioning within the flight corridor. This capability enaables Volatus to remain compliant with the controlled airspace authorization from Nav Canada, a non-profit that operates the country’s civil air navigation system.
The Trimble PX-1 RTX solution is available through Trimble sales channels.
Innoviz Technologies, a Tier-1 direct supplier of automotive-grade lidar sensor platforms and software stacks, is demonstrating its fully colored long-range lidar with camera at CES 2026 this week in Las Vegas.
The InnovizThree creates a compact sensor-fusion module designed to significantly reduce OEM integration complexity. The solution combines lidar and RGB sensing in a single compact perception module, purpose-built for behind-the-windshield installations, drones, micro-robotics and humanoids.
The consolidation of an RGB camera inside InnovizThree reinforces Innoviz’s commitment to scalable, OEM-friendly sensor-fusion perception solutions designed for series production and long-term deployment with the potential to enable faster deployment and cost saving.
The RGB sensing capabilities are factory-aligned with the lidar, with an ability to ensure precise and consistent visual-to-lidar geometry across production units. This alignment, combined with hardware-synchronized capture, will enable reliable multi-modal sensor-fusion data correlation while reducing calibration effort during vehicle integration., the company said.
Delivered through a single integration interface, the solution will minimize wiring, interfaces, and system complexity. This approach will reduce the overall integration burden for OEMs, which is expected to enable simpler validation processes, optimized engineering effort, lower cost and faster time-to-production.
TDK Corporation has announced Trusted Positioning STRIDE, an embedded pedestrian dead-reckoning (PDR) software solution engineered specifically for wearables — smart watches, head-mounted devices, glasses and compact sensors. STRIDE provides reliable positioning without the power and hardware demands traditionally required for GNSS-based tracking.
STRIDE’s low-power, sensor-agnostic software engine fuses inertial data with GNSS and opportunistic wireless signals, delivering continuous location tracking both indoors and outdoors.
STRIDE runs as embedded software, giving OEMs freedom to deploy positioning without redesigning hardware or relying on cloud connectivity, according to the company. STRIDE processes sensor data in real time, ensures low latency, and can be configured for on-device, companion-device, or cloud-assisted architectures. This flexibility helps manufacturers balance performance, power and form-factor constraints based on their device strategies.
Main features and benefits
Low-power on-device mode: Enables continuous PDR in platforms constrained by power, memory or thermal limits.
Geofencing mode: Allows location-based alerts and boundaries for children’s wearables, personnel safety, or activity zones.
Tethering of sensors: Seamlessly uses GNSS and sensors from a companion phone, reducing hardware demand on the wearable.
Off-device processing: Supports computation on a smartphone or in the cloud for advanced analytics or battery saving.
GNSS duty-cycling: Dramatically extends battery life by activating GNSS only when necessary.
Flexible mounting support: Works across watches, smart glasses, helmets, chest-mounted devices and more.
Embedded and real-time: Runs directly on the device with low latency — no dedicated infrastructure, no specialized hardware
Hardware-independent and sensor-agnostic: Integrates easily with a broad range of IMUs and GNSS receivers.
STRIDE is available immediately for trial evaluation, OEM integration, or companion-device implementations.
To celebrate 30 years of the Galileo global navigation system, the European Space Agency created the following video. Astronomer Galileo Galilei makes an appearance.
“Three decades of challenges and triumphs that have shaped the navigation systems we rely on today: EGNOS and Galileo, and that serve as a legacy to building the satellite navigation systems of tomorrow,” states ESA.
In October 1995, the ESA Council at Ministerial Level approved ARTES Element 9, initiating the studies and development of GNSS-1 (EGNOS) and GNSS-2 (Galileo). However, the first steps leading to this moment started as early as the 1980s, with pioneering research and studies conducted by ESA, national space agencies and European institutes.
Wingcopter’s authorized partner in Japan, ITOCHU Corporation, has signed a Memorandum of Understanding (MOU) to collaborate on the practical use of Wingcopter’s long-range drones in aerial surveying together with PASCO Corporation and YellowScan Japan.
The companies initially plan to use the Wingcopter 198 in disaster management where drone-based surveying is playing an increasingly important role,
to create hazard maps and monitor ground deformation as part of effective pre-disaster prevention,
to gather information and assess damage in the event of a disaster, and
to measure terrain changes and develop recovery plans during post-disaster restoration.
According to Wingcopter, carrying out these tasks is easier and less risky with fixed-wing drones such as the Wingcopter 198 than with traditional human or aircraft-based methods.
About 70 percent of Japan’s land consists of mountainous and hilly terrain, with steep slopes and short, fast-flowing rivers. Conventional multicopter droneswould not be suitable for such tasks as they are limited in range and coverage compared to the Wingcopter 198.
Image: Wingcopter
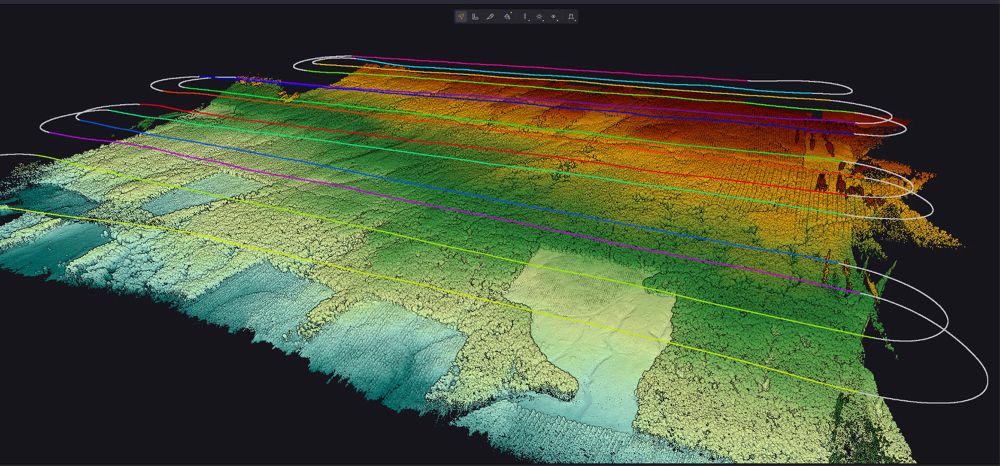
Under the MOU, YellowScan Japan’s advanced lidaer scanner Voyager will be used on the Wingcopter 198. By integrating this technology with PASCO’s extensive expertise in operational quality and safety in aerial surveying, it is possible to carry out long-distance and large-area surveys that were previously difficult to achieve without manned aircraft.
In a single 45-minute flight, the Wingcopter 198 can scan 1,000+ hectares, simultaneously capturing lidar and RGB data, allowing the system to generate an exceptionally high point density and precision. This makes it suitable even for demanding applications.
The collaboration also promotes automation and labor savings in surveying tasks, contributing to sustainable development in the surveying industry and reducing disaster risks.
Anello Photonics has launched the Anello Aerial inertial navigation system (INS), a compact, high-performance inertial navigation system built around the company’s Silicon Photonics Optical Gyroscope technology and integrated with multi-band GNSS receivers.
Anello made the announcement at CES 2026, taking place this week in Las Vegas.
The Anello Aerial INS is built for demanding aerial platforms — including BVLOS UAS, maritime/shipborne VTOL UAS, ISR/special-mission aircraft, heavy-lift and cargo drones, and other autonomous aerial vehicles. The system is powered by an advanced EKF-based sensor fusion engine and ANELLO flight-profile-tuned algorithms, consistently delivering >98% navigation accuracy without the need for cameras or fiber-optic cables.
The Anello Aerial INS delivers <0.5 deg/hr unaided heading drift, maintaining accurate navigation and control through high-dynamics and GNSS jamming, spoofing, or occlusion. Anello’s navigation solutions are built to deliver assured performance in fully GNSS-denied environments — whether operating over water or desert corridors, in night or low-light missions, or through fog and cloud cover — maintaining precise guidance without GPS and enhancing warfighters’ effectiveness and survivability.
“Customers flying real missions need resilient navigation when GPS isn’t reliable,” said Mario Paniccia, co-founder and CEO of Anello Photonics. “By combining our SiPhOGs with our airborne-optimized sensor-fusion algorithms and integrated multi-band GNSS, the Anello Aerial INS delivers accurate navigation solutions in a cost-effective SWaP-friendly package. This allows UAVs to hold course through GPS jamming, multipath, spoofing, or outages using only Anello without the need for cameras or fiber-optic cables and allows the warfighter to complete their mission safely and successfully.”
ANELLO’s full product portfolio has been developed in close collaboration with customers and verified through comprehensive integration and mission-platform testing.
The Anello Aerial INS is available for evaluation today with production shipments beginning in the second quarter of this year. Evaluation kits include the Anello Aerial INS, cabling, drivers for PX4/ArduPilot, and a quick-start integration guide.
Happy New Year! I’ve always felt that a fresh calendar represents a world of new opportunities, and I wish you all a fantastic 2026. For many, this is a season for reflection and self-improvement, with goals typically centered on fitness, faith, personal growth or career milestones.
As regular readers of this newsletter know, my primary focus over the past year has been to champion the importance of geodesy and to prepare the geospatial community for the National Geodetic Survey’s modernized National Spatial Reference System (NSRS).
To see how modern tech would handle such a specialized professional niche, I asked the AI chatbot Grok: “What would be a good New Year’s resolution for a user of the National Spatial Reference System?”
The response was quite insightful. Take a look at what it suggested below.
What would be a good New Year’s Resolution for a user of the National Spatial Reference System? (Grok’s Response)
Fun and Practical New Year’s Resolutions for NSRS Users
As we head into 2026, the modernization of the NSRS is in full swing. NOAA’s National Geodetic Survey (NGS) released the first beta products in June 2025, with ongoing rollouts and testing throughout the year. The full transition to new frames like NATRF2022 and NAPGD2022 is expected soon, bringing centimeter-level accuracy aligned with GNSS and global standards—but it requires preparation.
Here are some timely, geodesy-inspired New Year’s resolutions tailored for surveyors, GIS professionals, engineers, and anyone relying on the NSRS:
Fully transition workflows to the modernized NSRS. Commit to updating software, processes, and datasets for the new terrestrial reference frames and geopotential datum. Test tools on the NGS Beta site and provide feedback to help shape the final rollout.
Achieve new heights (and accuracies) in 2026. Embrace NAPGD2022 for more precise orthometric heights. Resolve to reprocess key projects with updated transformations (via NCAT or VDatum) and say goodbye to NAVD 88 quirks.
Stay grounded in best practices. Incorporate the latest NGS guidelines, like NOS NGS 92 standards for GNSS surveys. Attend webinars and workshops, or review resources, to keep your positioning sharp.
Contribute to the system. Submit high-quality GNSS data via OPUS-Share or participate in crowdsourced efforts to improve the network. Help make the NSRS even more robust for everyone.
Measure progress monthly. Track how the modernization impacts your work—review coordinate shifts, audit legacy data, and plan for smoother integrations in future projects.
These resolutions blend practicality with the spirit of improvement that defines geodesy. Happy New Year—may your positions be accurate, your elevations precise, and your datums forever modernized! For the latest updates, check geodesy.noaa.gov.
It’s no surprise that Grok highlighted the NSRS modernization; it even incorporated a photo of a geodetic benchmark I took for my July 2025 GPS World Survey Scenenewsletter.
Understanding that most AI chatbots personalize results using past interactions (unless disabled), I wanted to test this. After clearing my cache and deleting all previous Grok interactions, I posed the question again.
You can find that second, impersonalized response below.
Second Response from Grok
What would be a good New Year’s Resolution for a user of the National Spatial Reference System? Grok’s Second answer.
Here are some practical, realistic, and useful New Year’s resolutions tailored for someone who regularly works with the NSRS whether you’re a surveyor, GIS professional, geodesist, engineer or data manager:
“This year, I will stop mixing epochs without documenting them.” Resolve to always record the reference epoch (e.g., 2010.0, 2020.00) when I use NAD83(2011), NAD83(CORS96), NAD83(2011) epoch-specific coordinates, or when I transform to ITRF2020/2020.0. Bonus: add epoch to layer names and metadata.
“I will run OPUS or CSRS-PPP at least once a month to keep my local control fresh.” Make it a habit to periodically re-observe a trusted point and submit it to NOAA’s OPUS (or CSRS-PPP in Canada) to verify that my local network hasn’t drifted too far from the national datum.
“I will finally transition at least one active project to the modern NSRS (NAD83(2011)/NAVD88 → NATRF2022 / NAPGD2022).” Pick one ongoing or new project and do the full datum shift. Learn the tools (NADCON5, VERTCON3, GEOID18 → GEOID2022) and document what changed.
“I will replace every ‘NAD83’ label that doesn’t specify an epoch or realization with something more precise.” No more generic “NAD83” in reports, plats, or metadata. Aim for “NAD83(2011) epoch 2010.0” or “NAD83(2011) CORS-derived” — or better yet, start using NATRF2022 when appropriate.
“I will learn to use the NGS Coordinate Conversion and Transformation Tool (NCAT) fluently.” Commit to doing at least 5 conversions or transformations per month in NCAT instead of relying on old software or hand-calculated factors.
“I will check the NGS Data Explorer / Datasheet for every benchmark or CORS I plan to use — before I use it.” No more assuming a published value is still good. Make it a 2-minute ritual to look up the latest adjusted position and velocity.
“I will attend at least one NGS webinar or read one Bluebook chapter in 2026.” The NGS webinar series is free and excellent. Pick one session (e.g., on GEOID2022, NATRF2022 implementation, or GNSS vector processing) and actually watch it.
“I will prepare a small ‘before/after’ datum comparison report for my organization or clients.” Quantify what the 2022–2025 NSRS modernization means in your typical project area (horizontal shift, orthometric height change). Even a one-page summary builds understanding and credibility.
“I will stop treating GEOID18 as the final word and start using GEOID2022 for new work.” Especially important for projects that will live past 2025, as NGS is phasing out support for older geoids.
Pick one or two that feel achievable and most relevant to your day-to-day work. My personal favorite starter resolution for most NSRS users in 2026: “In 2026, I will clearly label the datum, realization, epoch, and geoid model on every deliverable I produce.”
That one habit alone dramatically reduces confusion downstream.
I really appreciate Grok’s responses because they address crucial issues that many geospatial users either overlook or take for granted, emphasizing the importance of proper documentation and associated metadata.
Key Resolution Examples:
Specificity: “I will replace every ‘NAD83’ label that doesn’t specify an epoch or realization with something more precise.”
Verification: “I will check the NGS Data Explorer / Datasheet for every benchmark or CORS I plan to use — before I use it.”
It is important to note that the AI chatbot assumes the modernized NSRS has already been adopted, which, as of January 2026, is not the case. This highlights that AI still has limitations and requires human oversight.
I challenge you to ask your own AI chatbot a similar, niche question related to your profession and compare its responses.
Beyond the specific technical corrections, Grok provided excellent general advice for any geospatial professional. Take, for example, action items 1 and 5 from its first response:
Transition Workflows: Commit to fully updating software, processes, and datasets to align with the new terrestrial reference frames and geopotential datum.
Measure Progress Monthly: Track the real-world impact of modernization by reviewing coordinate shifts, auditing legacy data, and planning for smoother integrations in upcoming projects.
Even though the modernized NSRS has not yet been officially adopted as of January 2026—with official release and FGCS approval expected later this year—following these steps now ensures you are prepared for the official transition when it occurs.
To help your team prepare for the official transition later this year, I’ve included a box titled “Questions to Guide a Self-Assessment of Your Operation and Products.” These questions, originally featured in my October newsletter, are designed to ensure your organization is fully equipped to implement the new NSRS the moment it is adopted.
Are you generating or using geospatial data (or doing both)?
If so, your workflows are likely dependent on geodetic control tied to one or more NGS products. The upcoming NSRS update will affect these dependencies. (See the box titled “List of NGS Products and Services.”)
Do you know if your mission, project, or datasets depend on NGS products?
Identifying whether and how your entity relies on NGS products is a critical first step in assessing potential impacts.
What are your accuracy, precision, and shelf-life requirements for geospatial data?
Understanding your mission’s specific data requirements ensures you can evaluate whether NSRS modernization will meet your operational needs without unnecessary adjustments. This should include plans to accommodate greater accuracy in the future.
Do you know how your entity accesses and utilizes geospatial data?
Are you obtaining it directly from NGS or indirectly through third-party vendors (e.g., RTN systems, GIS platforms, GNSS companies)?
Many entities rely on geodetic control without realizing it. NGS’s foundational data and frameworks are often invisible and seamlessly embedded within the tools and services offered by third-party vendors, such as GIS platforms, survey equipment, and software providers. These vendors, in turn, depend heavily on NGS products like the NSRS to ensure their tools are accurate and functional. Understanding this indirect reliance is crucial for preparing your workflows and ensuring continuity as the NSRS is modernized.
Where does your entity fit in with the geodetic workflow?
Does your entity create integral products (e.g., GNSS data, Lidar data) on which other products depend?
Evaluating these dependencies will help you determine the scope of NSRS modernization impacts.
What are your project requirements for data accuracy and longevity?
Assess whether your data accuracy thresholds and long-term usability align with the modernized NSRS.
Have you evaluated workflows and identified potential impacts in areas affected by significant ground movement (e.g., regions with tectonic shifts, vertical land motion, and, most notably, subsidence)
Identifying potential risk or disruption areas can guide prioritization and help mitigate impacts on critical operations.
While the original meeting scheduled for October 15, 2025, was canceled due to the Federal Government Shutdown, it has been officially rescheduled for Wednesday, January 21, 2026. This meeting will be critical for aligning agency engagement strategies and self-assessments ahead of the final adoption of the new datums.
Increase awareness of the National Spatial Reference System (NSRS) Modernization rollout schedule and engagement strategy, including self-assessment and interaction between official departmental working groups and an NGS point of contact.
Within other Departments, connect decision-makers to those who accomplish NSRS modernization tasks and designate points of contact to interface with NGS capacity-building efforts.
Share experiences and strategies among federal agencies concerning NSRS Modernization self-assessment and preparation.
(New) Formally transition the foundational beta products (released in May 2025) from preliminary to final.
Gather questions, discuss anticipated challenges, and identify opportunities to support each other through this transition.
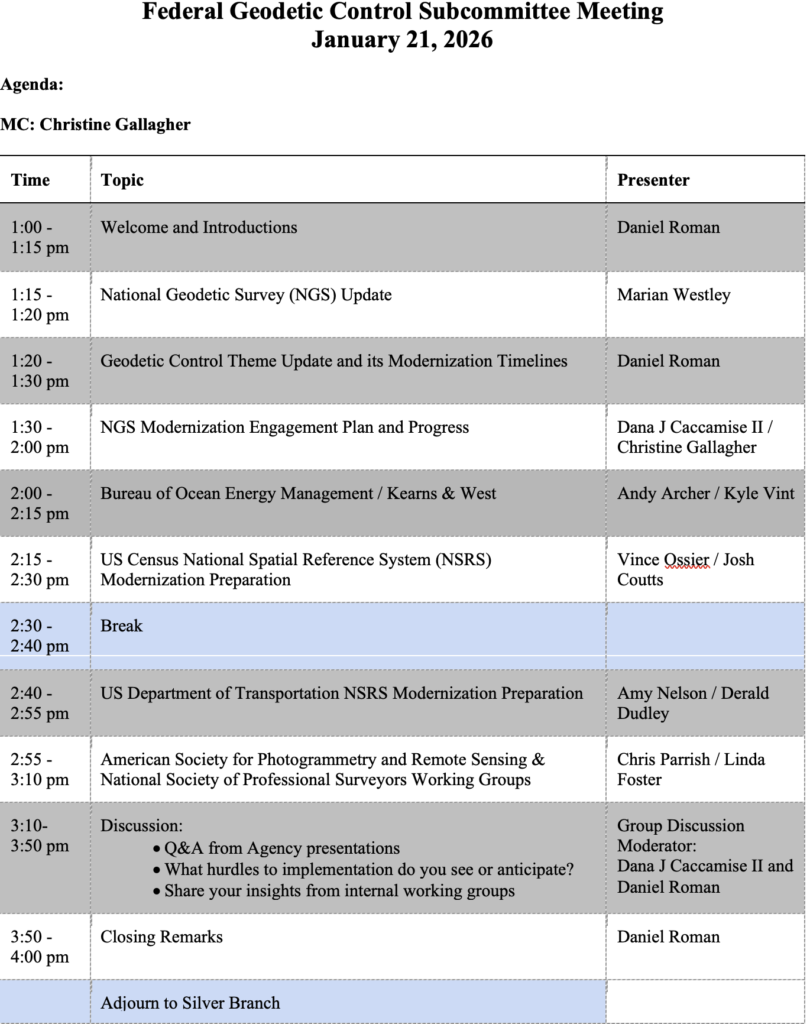
The FGCS plays a central role in coordinating geodetic activities across the federal government, including the development of standards and the promotion of the use of authoritative geodetic control (e.g., CORS, geoids) to ensure that geospatial data is accurate, accessible, and interoperable, and to advance the modernization of NSRS across agencies and recommend the adoption of the modernized NSRS by FGDC as the official basis for geodetic control in the United States. It is my understanding that this meeting is open to the public (virtually) for listening and observation. The box titled “Federal Geodetic Control Subcommittee Meeting” provides the agenda of the January 21, 2026, meeting.
Federal Geodetic Control Subcommittee Meeting Agenda held January 21, 2026.
To join the meeting virtually, registration is required. You can find all the necessary details and a direct link to sign up in the box titled “Registration for the Virtual Attendance of the Meeting.”
NOAA’s National Geodetic Survey (NGS) invites you to the upcoming Federal Geographic Data Committee (FGDC) Federal Geodetic Control Subcommittee (FGCS) meeting.
In October 2025, NSPS held its Fall meeting. The box titled “Excerpts from 2025 NSPS Fall Meeting Report: October 17, 2025” contains excerpts from the report provided by Richard Kleinmann, Wisconsin NSPS Director, on the working group’s activities being performed by the National Society of Professional Surveyors (NSPS) Professional Standards NSRS Modernization Subcommittee.
Submitted by: Richard Kleinmann PLS, Wisconsin NSPS Director
Subcommittee Purpose: To promote awareness, adoption, and readiness for the implementation of the Modernized National Spatial Reference System (NSRS) in cooperation with the National Geodetic Survey (NGS) and other geospatial groups.
Activities: NSPS leadership and the NSRS Modernization Subcommittee continue to work closely with NGS to promote awareness, adoption, and readiness for the new 2022 datums, which are expected to be approved sometime in 2026. Due to federal funding challenges occurring in 2025, NSPS felt it necessary to intensify its support of NGS and the modernization of the NSRS which was the genesis of this subcommittee.
The NSRS Modernization Subcommittee is also working on a series of documents originally developed by Dana J. Caccamise of NGS intended to be used by Federal Agencies in the transition to the new datums. We are adapting the documents to change the “voice” from NGS to NSPS and the intended audience to state, regional, county and local agencies, as well as private practitioners, to help them transition smoothly to the modernized NSRS. At this point, the document package includes:
Briefing materials for agency coordination (Presentation Template)
These document resources are being developed with the hope to share them via NSPS social media outreach efforts and possibly a geospatial information “hub” shared by NSPS and other geospatial organizations.
Proposed Whitepapers/Use Case Reports: The intent of these whitepapers is to is to provide a somewhat higher-level view of how the transition to the new datums/frames can be accomplished by showing what tools are available and what to consider when designing a project approach. Our hope is to promote the adoption of the new datums and share the benefits of doing so. Basically, adopting a “be prepared, not scared” attitude. We are looking for people willing to share their solutions so others can benefit from their experience and be more likely to be early adopters. It is not our intent to develop detailed step by step recipes that can be blindly followed because every geographic region has their unique circumstances that need to be considered but the white papers will instead supply the foundation for them to confidently build a project approach that works in their situation.
Coordination with other working groups: NSPS is looking forward to coordinating with similar Working Groups that NGS has encouraged to be formed by the American Society for Photogrammetry and Remote Sensing (ASPRS) and the American Association for Geodetic Surveying (AAGS). There are several Task Forces and Committees formed on the state level that are also working on adoption and implementation issues specific to their states. Together, these efforts aim to build understanding, reduce uncertainty, and support the geospatial community’s successful implementation of the updated reference framework. NSPS and NGS have committed to having a significant presence at Geo Week in Denver, Colorado, on February 16-18, 2026.
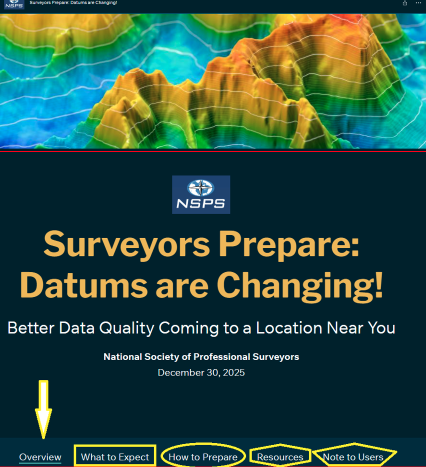
As mentioned in the working group’s report, “As an outgrowth of interaction between NSPS & NGS during NGS quarterly meetings and at geospatial events such as the ESRI User Conference and Geo Week, the NSPS leadership team and subsequently the NSRS Modernization Subcommittee began developing a suite of resources — including an ArcGIS StoryMap with several resources useful for the transition. See the link for the NSPS ArcGIS Story map here: https://share.google/oOAIapPQnux5q8nwl.
The box titled “NSPS ArcGIS Story Map” offers a detailed look at this resource, which visually illustrates the impact and benefits of the upcoming NSRS modernization.
NSPS ArcGIS Story Map
The website has five buttons:
Overview
What to Expect
How to Prepare
Resources
Note to Users
The section titled “The Overview Section” details the essential information — who, what, where, when, and why — regarding the new, modernized NSRS. Additional information is available on the website.
Overview
WHO: The National Geodetic Survey (NGS), located within the National Oceanic and Atmospheric Administration (NOAA) of the United States government. The NGS is responsible for defining, maintaining, and providing access to the country’s positioning infrastructure called the National Spatial Reference System (NSRS).
WHAT: Is updating the NSRS – horizontal (geometric, NAD 83) and vertical (geopotential, NAVD 88 and local island vertical datums PRVD02, USVI09, ASVD02, GUVD04, HAWAII – Local Tidal) geodetic datums, an effort that has been underway since 2007.
WHERE:The North American, Pacific, Caribbean, and Marianas plates.
WHEN: Now – rollout is underway. An updated Federal Register Noticewas released on October 9, 2024. Alphaand Betaproducts are being released, with full replacement of the NSRS anticipated in 2026.
WHY: These datums have been in use since GPS was in its infancy – i.e., for decades, and there are known limitations that the new system addresses:
NAD 83 is not as geocentrically defined as today’s positioning technologies demand, meaning not referenced to the center of Earth’s mass, by about 2.24 meters based on the latest international estimates. This is problematic when using Global Navigation Satellite Systems (GNSS), which orbit about and provide positions relative to the center of the Earth.
NAD 83 grouped the North American and Caribbean plates in its definition. The updated system has broken those two plates out (because we now understand how to measure how the plates rotate individually) in addition to the Pacific and Marianas plates included in NAD 83, resulting in definitions for four Terrestrial Reference Frames (TRFs): NATRF2022, PATRF2022, MATRF2022, and CATRF2022.
Continental drift and vertical land movement were not accounted for in the existing NSRS. Reference epochs (timestamps, for instance) for coordinates have been introduced for survey data to help us better understand movement or change over time.
Based on current international geoid estimates, NAVD 88 is biased by approximately 1.5 meters and tilted by 1 meter coast-to-coast.
There are currently multiple vertical datums. The new system will consist of one.
NAD 83 and NAVD 88 were designed independently, resulting in reduced accuracy. In the new system, they were designed together, resulting in better integration and higher accuracy.
GEOID 18 and previous models were hybrid models “warped” to match leveled benchmarks. GEOID2022 will be a more consistent and stable model as it is a purely gravimetric geoid model.
Currently, both physical marks and continuously operating GNSS stations are relied upon for the existing NSRS. Physical marks degrade and are destroyed over time, negatively affecting height and position data. The modernized NSRS will rely exclusively on GNSS stations.
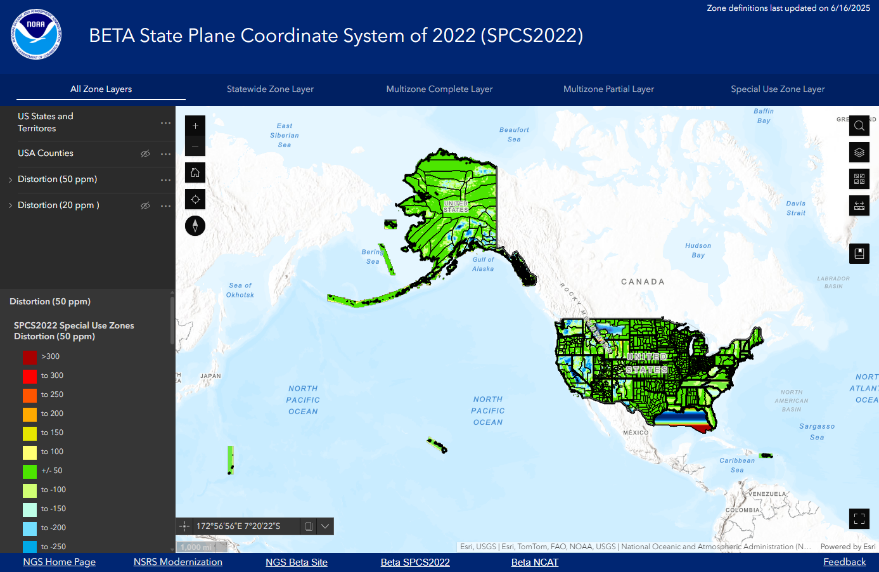
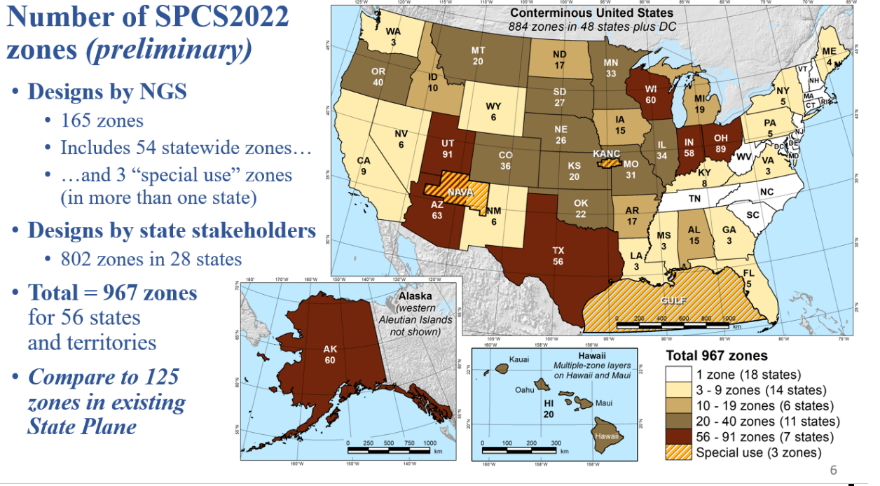
State Plane Coordinate System 83 (SPCS 83) includes high levels of distortion for many areas. The modernized SPCS2022 minimizes distortion or scale error (the difference between ground and grid measurements) at the topographic surface rather than the reference ellipsoid surface, and is designed to minimize distortion in populated or high-use areas.
An important change between SPCS 83 and the upcoming SPCS2022 is that only the international foot (1 foot = 0.3048 meter, exactly) will be supported, which differs from SPCS 83, with some states officially using the international foot while others use the U.S. survey foot (1 foot = 1200/3937 meters). This is consistent with the deprecation of the U.S. survey footinitiated by the National Institute of Standards and Technology (NIST) at the end of December 2022.
The website makes it easy to spread the word about NSRS modernization. By clicking the share button on the right side of the page, you can access several ways to distribute the story map with colleagues or on social media.
The Sharing the NSPS ArcGIS Story Map includes more details — it even includes an embedded QR code that you can scan to open the map directly on your mobile device.
You can access it on your mobile device using the code below.
NSPS ArcGIS Story Map QR Code
For those who prefer a physical copy or a clean PDF, the site also offers a print-friendly version. See the box titled “NSPS ArcGIS Story Map – Print View” for instructions on how to access it. This 15-page document provides all the same information as the interactive site in a consolidated, easy-to-read format.
NSPS ArcGIS Story Map – Print View
As highlighted in the NSPS working group’s October report, both NSPS and NGS are committed to a major presence at Geo Week in Denver, Colorado, from February 16–18, 2026.
A key session, “NSRS Modernization – The Latest Technical Updates,” is currently scheduled for February 17, 2026, at 2:00 PM. For more details on the presentation and speakers, refer to NSRS Modernization – The Latest Technical Updates below.
2:00 PM – 3:30 PM MT
Bluebird Ballroom 1A
The National Spatial Reference System (NSRS) is undergoing a major transformation to provide more accurate, accessible, and consistent geospatial reference data across the United States. This session will present the latest technical updates on NSRS modernization, including advancements in geodetic reference frames, updated survey standards, and enhanced tools for positioning and measurement. Attendees will learn how these changes impact surveying, mapping, infrastructure, and engineering projects, and gain practical guidance for integrating modernized NSRS data into workflows. This session is essential for professionals seeking to stay current with the evolving national geospatial reference framework.https://mail.google.com/mail/u/0/#search/lfoster%40esri.com/FMfcgzQcqtcPbfppZtnTpZZWDMkQcXfk?projector=1&messagePartId=0.1
I wish you all a prosperous 2026 filled with wonderful new relationships, exciting opportunities, and continued happiness and success.
Greece now has its own internet of things (IoT) nano satellite in space, the MICE-1 (Maritime Identification and Communications systEm). MICE-1 was launched Nov. 28 aboard a Falcon 9 rocket from Vandenberg Space Force Base in California, as part of the Transporter-15 mission by SpaceX.
MICE-1 is the first Greek nanosatellite specifically designed for maritime and IoT communication applications. Developed at the Prisma Electronics facilities in Alexandroupolis, it aims to bring Greek shipping — and critical operational infrastructures in natural disaster scenarios — closer to the capabilities of space.
MICE-1 will collect and process shipping and environmental data in real time using artificial intelligence and advanced encryption techniques to ensure secure data transmission and analysis. It also paves the way for Greece’s presence in the field of space applications.
With real-time data collection and secure, two-way communication, MICE-1 contributes to reducing environmental footprint and promoting green technologies in shipping.
MICE-1 is a 3U CubeSat nanosatellite equipped with an AIS receiver to record, identify and track ship signals, as well as an S-band IoT communication system. The satellite’s objective is to establish direct communication with ships equipped with LAROS technology — Prisma Electronics’ innovative platform that facilitates the operational monitoring and optimisation of ocean-going vessels.
MICE-1 enables LAROS to leverage the capabilities of space, providing new tools for sustainable and efficient shipping. The company will also use the nanosatellite to optimize and evaluate the artificial intelligence algorithms it has developed, with the aim of assessing functionality impairment, predicting behaviour and managing telemetry in line with high cybersecurity standards.
A team of specialized engineers from Prisma Electronics participated in development of the nanosatellite in close collaboration with the European Space Agency. Operation of the main ground station was supported in collaboration with Democritus University of Thrace.
To meet the requirements of the mission, Prisma Electronics collaborated with international partners in the space sector, including SpaceX, Exolaunch, EnduroSat and IC-Space.
Prisma Electronics is already planning the next phase: the development of a comprehensive satellite IoT network for use in shipping, environmental monitoring and civil protection. The MICE-1 mission demonstrates that Greece is not just observing international space developments, but actively contributing to shaping them.
Carried out under the supervision of the European Space Agency (ESA), the mission is part of the Ministry of Digital Governance’s national IOD/IOV CubeSat nanosatellite programme, which forms part of the Greece 2.0 initiative. This programme is funded by the European Union’s Recovery and Resilience Facility (RRF).